http://www.iaeme.com/IJME International Journal of Mecha Volume 8, Issue 5, May 2017, pp Available online at http://www.ia ISSN Print: 0976-6340 and ISSN © IAEME Publication DESIGN AND ASS Chikesh Ranjan, Shahid. Dept. of Mechanical Enginee ABSTRACT In order to perform m rescue, inspection of high in nuclear including swee attachment/detachment of building is necessary. Thou a vertical wall easily and w force should be designed working equipment. In thi suction force of suction pa Key words: Vacuum Suct Wall, Fastening Equipmen Cite this Article: Chikesh Vishal Jaysawa Design and Journal of Mechanical Eng http://www.iaeme.com/IJM 1. INTRODUCTION It has long been a dream of vacuum assist wall climber w gravity which may provide s climbing machine which uses is worn like a backpack, can c rock-without a rope. But the m grip to any vertical surface. S from two suction pads and airtight seal when pressed aga the vacuum. It can also be ope device without falling to the g is used include materials ha materials-handling application have a flat surface and are not ET/index.asp 365 ed anical Engineering and Technology (IJMET) p. 365–371, Article ID: IJMET_08_05_039 aeme.com/IJMET/issues.asp?JType=IJMET&VTyp N Online: 0976-6359 Scopus Indexed D FABRICATION OF VA SIST WALL CLIMBER .J.Akhtar, Ajit Kumar Choudhary, Vivek V ering, RTC Institute of Technology, Anandi, O India. maintenance on the outer walls of a high-ris h pipes and wall, evaluation and diagnosis of eping, painting and repairs, a device that en working equipment such as a gondola to the ugh vacuum suction pads can be used to faste without causing damage to the contact surfac by considering both external conditions an is project, we performed a basic experiment ads attached to a vertical wall under various l tion Force, Suction Pads, High-rise Building, nt. h Ranjan, Shahid.J.Akhtar, Ajit Kumar Choud d Fabrication of Vacuum Assist Wall Climbe gineering and Technology, 8(5), 2017, pp. 36 MET/issues.asp?JType=IJMET&VType=8&I man to possess the power to walk up vert will fulfil this dream of climb over a vertical some super human abilities to normal hum its vacuum pumps to produce a grip against t climb up to any height on any surfaces- inclu most important element was to come up with t So we developed the vacuum assist wall clim household vacuum pump. The pads, unsur ainst a vertical surface which is strengthened b erated hands-free, allowing a soldier to wield ground. This is Industrial applications, where andling, lamping, sealing and vacuum form ns, a pneumatic vacuum can be used to lift sm t more than several hundred kg in weight. A [email protected] pe=8&IType=5 ACUUM Vishal Jaysawa Ormanjhi, Ranchi, se building, fire f a storage tank nables the easy e outer wall of a en equipment to ce, their suction nd the loads of on the vacuum load conditions. Vertical Outer dhary, Vivek er. International 65–371. IType=5 tical surfaces. Now surface against the man. This is a wall the wall surfaces. It uding glass, brick or technology that can mber, which is made rprisingly, form an by the suction from d a weapon or other e a vacuum pressure ming. In terms of moothly objects that A materials-handling

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
http://www.iaeme.com/IJMET/index.
International Journal of Mechanical Engineering and Technology (IJMET)Volume 8, Issue 5, May 2017, pp.
Available online at http://www.iaeme.com/IJME
ISSN Print: 0976-6340 and ISSN Online: 0976
© IAEME Publication
DESIGN AND FABRICATION
ASSIST WA
Chikesh Ranjan, Shahid.
Dept. of Mechanical Engineering, RTC Institute of Technology, Anandi, Ormanjhi, Ranchi,
ABSTRACT
In order to perform maintenance on the outer walls of a high
rescue, inspection of high pipes and wall, evaluation and dia
in nuclear including sweeping, painting and repairs, a device that enables the easy
attachment/detachment of working equipment such as a gondola to the outer wall of a
building is necessary. Though vacuum suction pads can be used t
a vertical wall easily and without causing damage to the contact surface, their suction
force should be designed by considering both external conditions and the loads of
working equipment. In this project, we performed a basic experim
suction force of suction pads attached to a vertical wall under various load conditions.
Key words: Vacuum Suction Force, Suction Pads, High
Wall, Fastening Equipment
Cite this Article: Chikesh Ranjan, Shahid.J.Akhtar, Ajit Kumar Choudhary, Vivek
Vishal Jaysawa Design and Fabrication of Vacuum Assist Wall Climber
Journal of Mechanical Enginee
http://www.iaeme.com/IJMET/issues.asp?JType=IJMET&VType=8&IType=5
1. INTRODUCTION
It has long been a dream of man to possess the power to walk up vertical surfaces. Now
vacuum assist wall climber will fulfil this dream of climb over a vertical surface against the
gravity which may provide some super human abilities to normal human. This is a wall
climbing machine which uses its vacuum pumps to produce a grip against the wall surfaces. It
is worn like a backpack, can climb up to any height on any surfaces
rock-without a rope. But the most important element was to come up with technology
grip to any vertical surface. So we developed the vacuum assist wall climber, which is made
from two suction pads and household vacuum pump. The pads, unsurprisingly, form an
airtight seal when pressed against a vertical surface which is strength
the vacuum. It can also be operated hands
device without falling to the ground.
is used include materials handling, lamping
materials-handling applications, a pneumatic vacuum can be used to lift smoothly objects that
have a flat surface and are not more than several hundred kg in weight. A materials
IJMET/index.asp 365 [email protected]
International Journal of Mechanical Engineering and Technology (IJMET) 2017, pp. 365–371, Article ID: IJMET_08_05_039
http://www.iaeme.com/IJMET/issues.asp?JType=IJMET&VType=8&IType=5
6340 and ISSN Online: 0976-6359
Scopus Indexed
SIGN AND FABRICATION OF VACUUM
ASSIST WALL CLIMBER
.J.Akhtar, Ajit Kumar Choudhary, Vivek Vishal Jaysawa
Dept. of Mechanical Engineering, RTC Institute of Technology, Anandi, Ormanjhi, Ranchi,
India.
In order to perform maintenance on the outer walls of a high-rise building, fire
rescue, inspection of high pipes and wall, evaluation and diagnosis of a storage tank
in nuclear including sweeping, painting and repairs, a device that enables the easy
attachment/detachment of working equipment such as a gondola to the outer wall of a
building is necessary. Though vacuum suction pads can be used to fasten equipment to
a vertical wall easily and without causing damage to the contact surface, their suction
force should be designed by considering both external conditions and the loads of
working equipment. In this project, we performed a basic experiment on the vacuum
suction force of suction pads attached to a vertical wall under various load conditions.
Vacuum Suction Force, Suction Pads, High-rise Building, Vertical Outer
Wall, Fastening Equipment.
Chikesh Ranjan, Shahid.J.Akhtar, Ajit Kumar Choudhary, Vivek
Vishal Jaysawa Design and Fabrication of Vacuum Assist Wall Climber
Journal of Mechanical Engineering and Technology, 8(5), 2017, pp. 36
com/IJMET/issues.asp?JType=IJMET&VType=8&IType=5
of man to possess the power to walk up vertical surfaces. Now
vacuum assist wall climber will fulfil this dream of climb over a vertical surface against the
gravity which may provide some super human abilities to normal human. This is a wall
ne which uses its vacuum pumps to produce a grip against the wall surfaces. It
is worn like a backpack, can climb up to any height on any surfaces- including glass, brick or
without a rope. But the most important element was to come up with technology
grip to any vertical surface. So we developed the vacuum assist wall climber, which is made
from two suction pads and household vacuum pump. The pads, unsurprisingly, form an
airtight seal when pressed against a vertical surface which is strengthened by the suction from
It can also be operated hands-free, allowing a soldier to wield a weapon or other
device without falling to the ground. This is Industrial applications, where a vacuum pressure
is used include materials handling, lamping, sealing and vacuum forming. In terms of
handling applications, a pneumatic vacuum can be used to lift smoothly objects that
have a flat surface and are not more than several hundred kg in weight. A materials
T&VType=8&IType=5
OF VACUUM
Vivek Vishal Jaysawa Dept. of Mechanical Engineering, RTC Institute of Technology, Anandi, Ormanjhi, Ranchi,
rise building, fire
gnosis of a storage tank
in nuclear including sweeping, painting and repairs, a device that enables the easy
attachment/detachment of working equipment such as a gondola to the outer wall of a
o fasten equipment to
a vertical wall easily and without causing damage to the contact surface, their suction
force should be designed by considering both external conditions and the loads of
ent on the vacuum
suction force of suction pads attached to a vertical wall under various load conditions.
rise Building, Vertical Outer
Chikesh Ranjan, Shahid.J.Akhtar, Ajit Kumar Choudhary, Vivek
Vishal Jaysawa Design and Fabrication of Vacuum Assist Wall Climber. International
65–371.
com/IJMET/issues.asp?JType=IJMET&VType=8&IType=5
of man to possess the power to walk up vertical surfaces. Now
vacuum assist wall climber will fulfil this dream of climb over a vertical surface against the
gravity which may provide some super human abilities to normal human. This is a wall
ne which uses its vacuum pumps to produce a grip against the wall surfaces. It
including glass, brick or
without a rope. But the most important element was to come up with technology that can
grip to any vertical surface. So we developed the vacuum assist wall climber, which is made
from two suction pads and household vacuum pump. The pads, unsurprisingly, form an
ened by the suction from
free, allowing a soldier to wield a weapon or other
This is Industrial applications, where a vacuum pressure
, sealing and vacuum forming. In terms of
handling applications, a pneumatic vacuum can be used to lift smoothly objects that
have a flat surface and are not more than several hundred kg in weight. A materials-handling
Design and Fabrication of Vacuum Assist Wall Climber
http://www.iaeme.com/IJMET/index.asp 366 [email protected]
application where a vacuum cup called a suction cup is used to establish the force capability
to lift a flat sheet. The cup is typically made of a flexible material such as rubber so that a seal
can be made where its lip contacts the surface of the flat sheet. A vacuum pump is turned on
to remove air from the cavity between the inside of the cup and top surface of the flat sheet.
As the pressure in the cavity falls below atmospheric pressure, the atmospheric pressure
acting on the bottom of the flat sheet pushes the flat sheet up against the lip of the cup. This
action results in vacuum pressure in the cavity between the cup and the flat sheet that causes
an upward force to be exerted on the flat sheet. The magnitude of this force can be
determined by algebraically summing the pressure forces on the top and bottom surfaces of
the flat sheet. The atmospheric pressure on the top and bottom surfaces of the flat sheet
cancels out away from the outer circle area of the cup lip. If all the air were removed from the
cup cavity, we would have a perfect vacuum and thus the suction pressure would be equal to
zero in absolute pressure units
2. COMPONENTS OF VACUUM ASSIST WALL CLIMBER
Vacuum pump
2.2. Electric source
2.3. Pipelines
2.4. Suction pads
3. DESIGN PARAMETER
The main parameters in the design are maximum normal force at suction pad, maximum
altitude of operation of equipment and co-efficient of frication of the friction material. In
order to find the maximum normal load acting on the equipment, the vacuum pressure
generated by the motor is measured. A vacuum gauge is used for finding the pressure at the
suction end.
Vacuum pressure at the end of the suction line
= 200mmHg (mm of mercury)
= 200mmHg = 0.26675 bar.
Standard atmospheric pressure (P.atm) = 1.013 bar
Absolute pressure at the end of suction line (Pab)
= (Standard atmospheric pressure) – (vacuum pressure at the end of suction line).
= (1.013 – 0.2667)
= 0.7462 bar.
3.1. Area of suction pad
Inside area = 0.33 × 0.25 m2
= 0.082 m2
Outside area = 0.38 × 0.30 m2 = 0.114 m
2
3.2. Pressure Force
Pressure Force = Pout × A out – Pin × A in
= (1.013 × 0.114 - 0.7462 × 0.082)
= (0.115 – 0.062)
= 0.0530 × 105 N
= 5300 N

Chikesh Ranjan, Shahid.J.Akhtar, Ajit Kumar Choudhary, Vivek Vishal Jaysawa
http://www.iaeme.com/IJMET/index.asp 367 [email protected]
3.3. Maximum normal load
Maximum normal load (in kg) = 5300/ 9.8
= 540.81 ~ 500 kg.
There is a safe altitude up to which the equipment can safely operate. Also it depends
upon the load acting on equipment. Since he machine has an ultimate normal load capacity of
500 kg, margin of 200 kg is given. SO the ultimate is 300 kg.
3.4. Safe load
Safe load 150 kg can be assumed
4. DESIGN FORMULA
Horizontal suction pads, vertical force.
F th = m × (g + a) × f .s
Vertical suction pads, vertical force.
F th = m × (g +a/f) × f .s
Where,
F th =Theoretical holding force [N]
m = mass [kg]
g = acceleration due to gravity [9.81 m/s2]
a = system acceleration [m/s2] [max x, y & z axis = 5 m/s2]
f.s = factor of safety [ min=1.5 ,max =2.0 ]
f = co-efficient of friction
5. DESIGN AND FABRICATION
5.1. Modeling Using CATIA
CATIA V5, developed by Dassault Systemes, France, is a completely reengineered,
next-generation family of CAD/CAM/CAE software solutions for Product Lifecycle
Management. Through its exceptionally easy-to-use state of the art user interface, CATIA V5
delivers innovative technologies for maximum productivity and creativity, from concept
to the final product. CATIA V5 reduces the learning curve, as it allows the flexibility
of using feature-based and parametric designs.
The final Design of the Vacuum Assist Wall Climber with a tooling device on it is
modelled in CATIA V5 R19.
Design and Fabricatio
http://www.iaeme.com/IJMET/index.
5.2. FABRICATION
A physical prototype is being fabricated by using low cost, low weight
available in market to give a rough idea of how the robot will be and how it will work
Part
No.
Part Name
1. Suction Pad
2 Vacuum Pump
3 Handle
4 Pedal
5 Rope for Pedal
6 Pipeline
7 Switch
8 Bag pack
9 Electric Wire
10 Plug (Male-Female)
11 Extension code
Design and Fabrication of Vacuum Assist Wall Climber
IJMET/index.asp 368 [email protected]
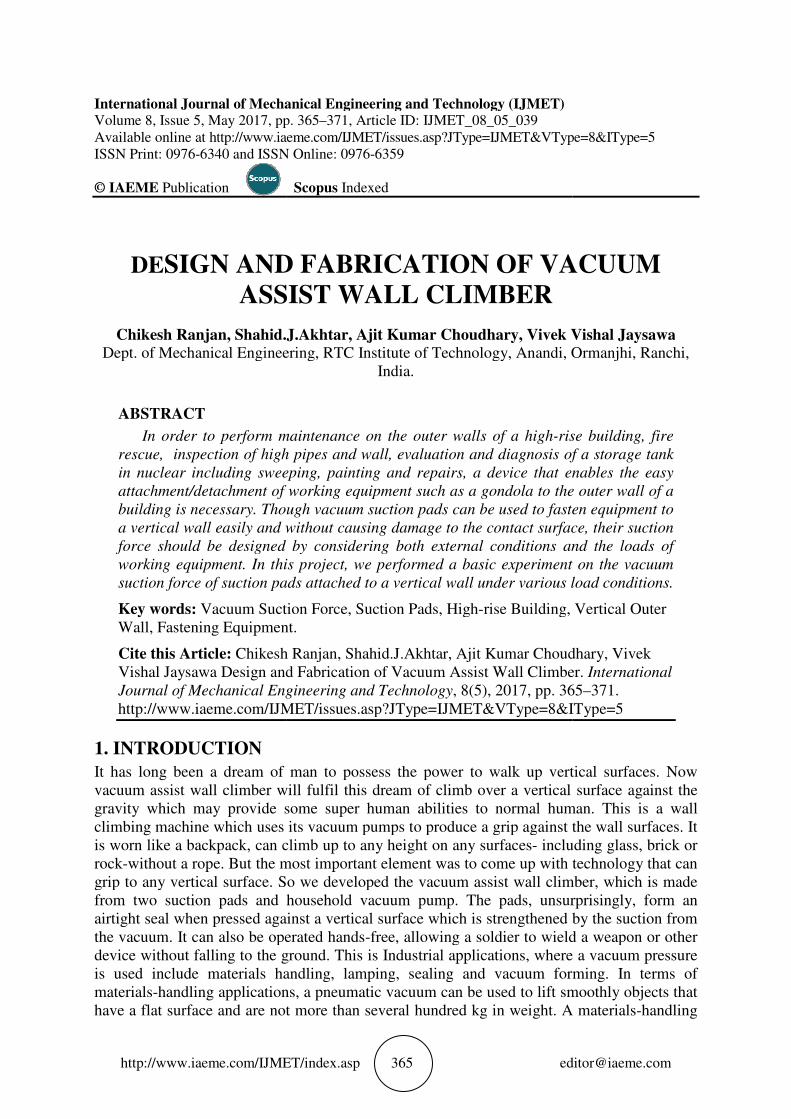
Figure 2D Design of suction pad
Figure 3D Design of suction pad
A physical prototype is being fabricated by using low cost, low weight materials which are
available in market to give a rough idea of how the robot will be and how it will work
Table 4.1 Parts Used for Fabrication
Materials
Used
Manufacturing
Method
Specifications
wood Manual operations 38×30×2.5mm
Plastic - 1400W flow rate 5.3 ltr/sec
Steel Manual operations 15×1×0.5 cm
wood Manual operations 20×15×1.5 cm
plastic - Length-100cm
Plastic - Diameter-4cm
Length-140cm
Plastic - 6A
Cloths 50×45×25 cm
copper - 400 cm
Female) Plastic -
- - 50 Meter
materials which are
available in market to give a rough idea of how the robot will be and how it will work
Specifications No of
Parts
38×30×2.5mm 2
flow rate 5.3 ltr/sec 2
15×1×0.5 cm 2
20×15×1.5 cm 2
100cm 2
4cm
140cm
2
2
50×45×25 cm 1
1
- 3
1
Chikesh Ranjan, Shahid.J.Akhtar, Ajit Kumar Choudhary, Vivek Vishal Jaysawa
http://www.iaeme.com/IJMET/index.asp 369 [email protected]
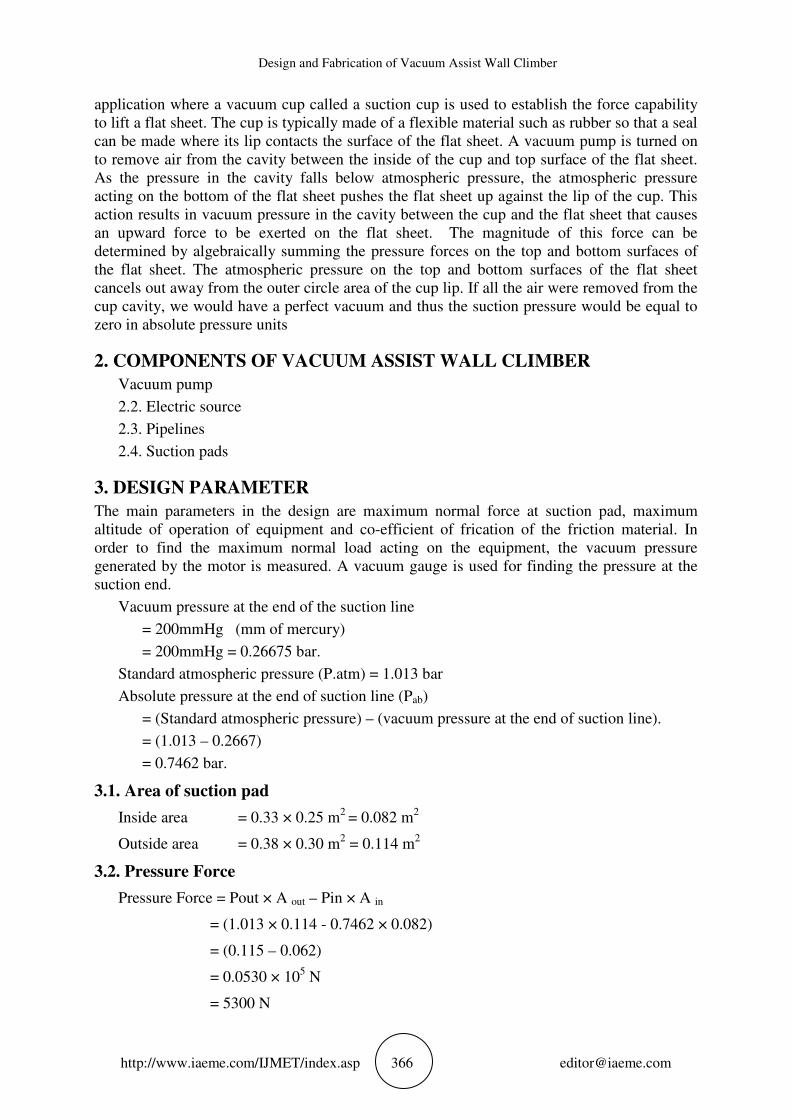
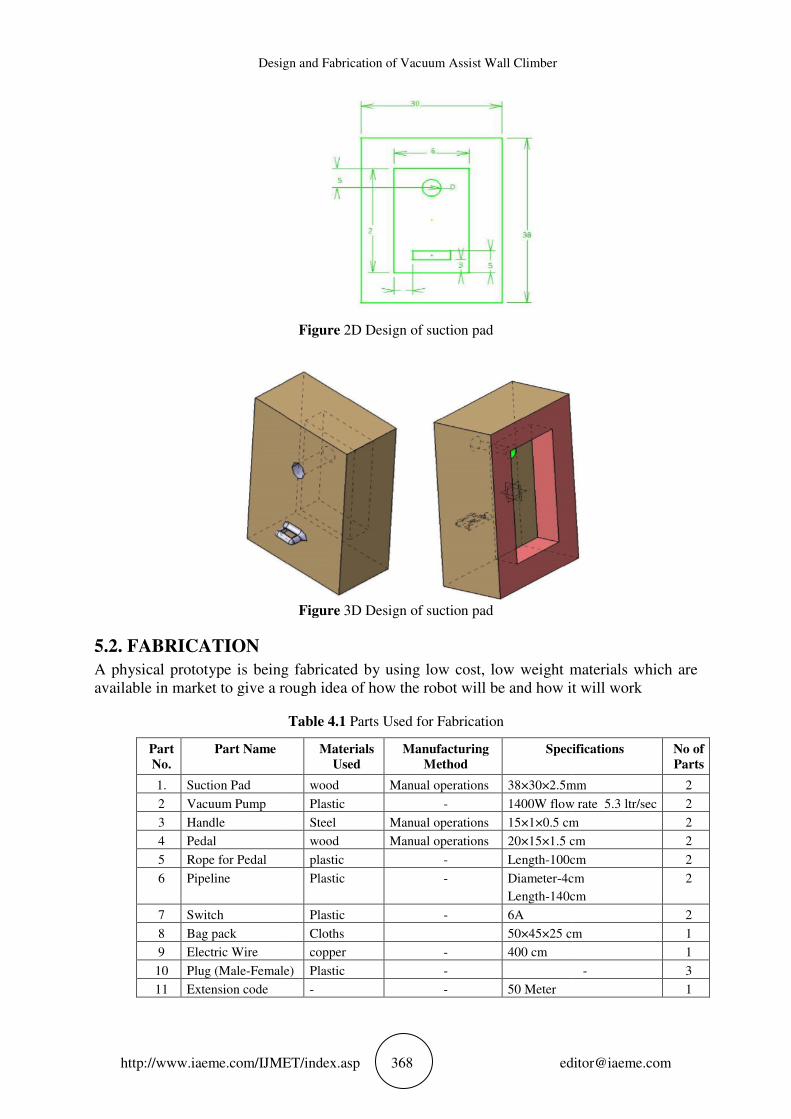
6. EXPERMENTAL SET UP
Figure 4.1 Suction Pad
Figure 4.2 Vacuum Pump Figure 4.3 Pedal
Figure 4.4 Vacuum assist wall climber assemblies Figure 4.5 Bag for vacuum pump
Design and Fabrication of Vacuum Assist Wall Climber
http://www.iaeme.com/IJMET/index.asp 370 [email protected]
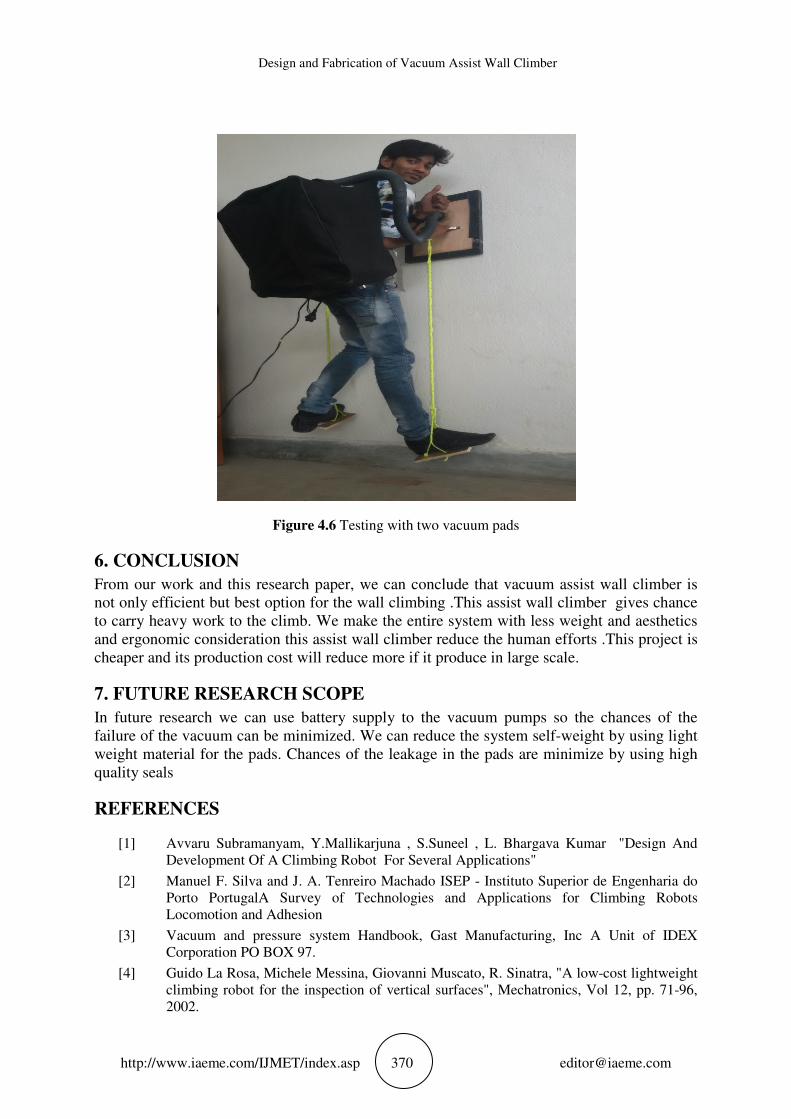
Figure 4.6 Testing with two vacuum pads
6. CONCLUSION
From our work and this research paper, we can conclude that vacuum assist wall climber is
not only efficient but best option for the wall climbing .This assist wall climber gives chance
to carry heavy work to the climb. We make the entire system with less weight and aesthetics
and ergonomic consideration this assist wall climber reduce the human efforts .This project is
cheaper and its production cost will reduce more if it produce in large scale.
7. FUTURE RESEARCH SCOPE
In future research we can use battery supply to the vacuum pumps so the chances of the
failure of the vacuum can be minimized. We can reduce the system self-weight by using light
weight material for the pads. Chances of the leakage in the pads are minimize by using high
quality seals
REFERENCES
[1] Avvaru Subramanyam, Y.Mallikarjuna , S.Suneel , L. Bhargava Kumar "Design And
Development Of A Climbing Robot For Several Applications"
[2] Manuel F. Silva and J. A. Tenreiro Machado ISEP - Instituto Superior de Engenharia do
Porto PortugalA Survey of Technologies and Applications for Climbing Robots
Locomotion and Adhesion
[3] Vacuum and pressure system Handbook, Gast Manufacturing, Inc A Unit of IDEX
Corporation PO BOX 97.
[4] Guido La Rosa, Michele Messina, Giovanni Muscato, R. Sinatra, "A low-cost lightweight
climbing robot for the inspection of vertical surfaces", Mechatronics, Vol 12, pp. 71-96,
2002.
Chikesh Ranjan, Shahid.J.Akhtar, Ajit Kumar Choudhary, Vivek Vishal Jaysawa
http://www.iaeme.com/IJMET/index.asp 371 [email protected]
[5] Nishi A., “A biped walking robot capable of moving on a vertical wall”, Mechatronics,
Vol. 2 (6), pp. 543-554, 1992.
[6] Nishi A., “Development of wall-climbing robots”, Compute Electron Eng, Vol. 22(2), pp.
123-149, 1996.
[7] Nishi A., Miyagi H., “A wall climbing robot using the thrust force of a propeller
mechanism and control in a strong wind”, JSME Int J Ser C, Vo1. 37, pp. 172-178, 1994.
[8] Tejaswini N, Poorna Sai R, Reddy Babu Naik B and Naveen G, Design and Analysis of
Large Transportable Vacuum Insulated Cryogenic Vessel. International Journal of
Mechanical Engineering and Technology, 7(6), 2016, pp. 45–57.
[9] V. V. Wadkar, S.S. Malgave, D.D. Patil , H.S. Bhore and P. P. Gavade, Design and
Analysis of Pressure Vessel Using Ansys. Journal of Mechanical Engineering and
Technology (JMET), 3(2), 2015, pp. 1–11.
[10] Hwang Kim, Dongmok Kim, Hojoon Yang, Kyouhee Lee, Kunchan Seo, Doyoung
Chang, Jongwon Kim, "A wall climbing robot with a vacuum caterpillar wheel system
operated by a mechanical valve", Proceedings of the 9th International Conference on
Climbing and Walking Robots, pp. 28-33, 2006.
Related Documents











