En vidareutveckling av the Intelligent Driver Model Johan Olstam och Andreas Tapani

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

En vidareutveckling av the Intelligent Driver Model
Johan Olstam och Andreas Tapani
Contents
� The intelligent Driver Model (IDM)
� The Human Driver Model
� Problems with the IDM
� A modified version of the IDM
� Microscopic comparison
� Macroscopic comparison
� Conclusions
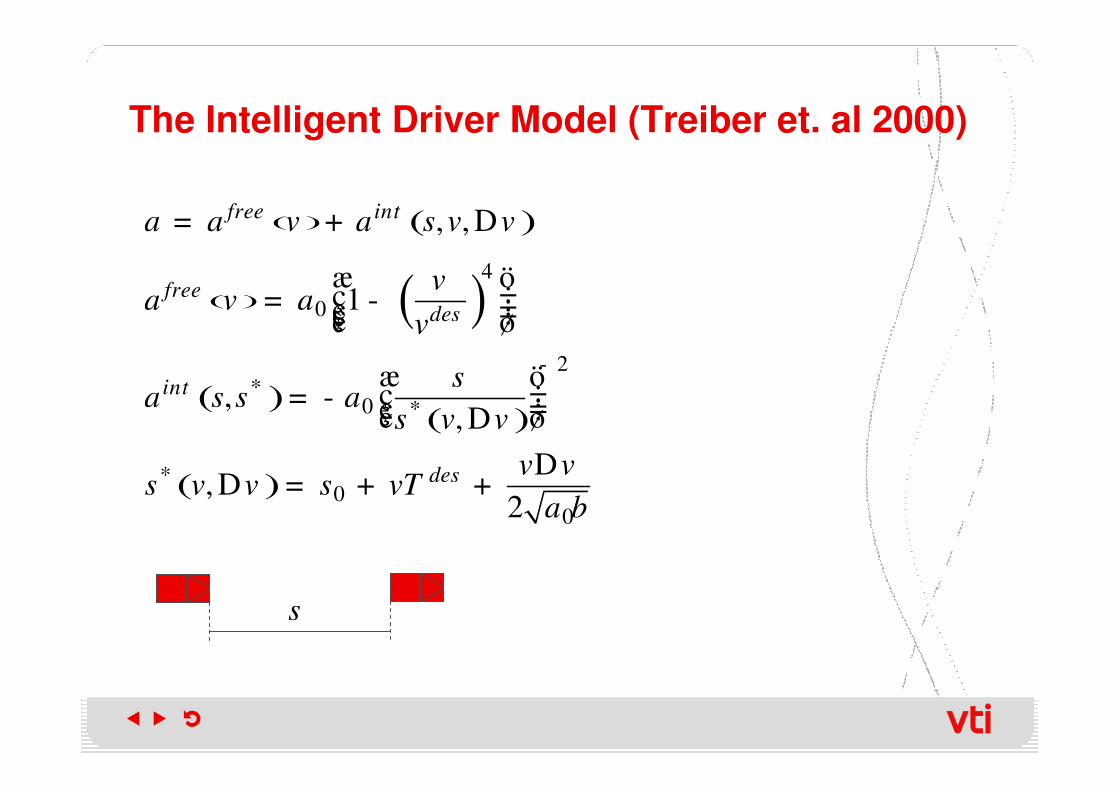
The Intelligent Driver Model (Treiber et. al 2000)
( ) ( )
( ) ( )
( )( )
( )
4
0
2
0
00
, ,
1
,,
,2
free int
freedes
int
des
a a v a s v v
va v a
v
sa s s a
s v v
v vs v v s vT
a b
-*
*
*
= + D
æ ö÷ç= - ÷ç ÷çè ø
æ ö÷ç= - ÷ç ÷è øD
DD = + +
s

Advantages with the IDM
The IDM has
� reached good scores in model cross-comparison tests
� physically interpretable parameters such as desired speed (vdes), desired time gap (Tdes),
and desired maximum acceleration (a0) and
deceleration rate (b)

The Human Driver Model (HDM)
(Treiber et. al 2006)
The HDM includes
� finite reaction times (T’)
� spatial anticipation (considering n>1 leaders)
� temporal anticipation (anticipating the change in relative position and speed to the considered leaders)
� modeling of drivers' imperfect estimation capabilities of the surrounding vehicles' position, speed, etc.
A version of the HDM extended IDM was in Olstam et. al. (2009) used within a model for simulating surrounding vehicles in a driving simulator.
( ) ( ) ( )1i
free inti iji
j i n
a t a t T a t T
-
= -
¢ ¢= - + -å

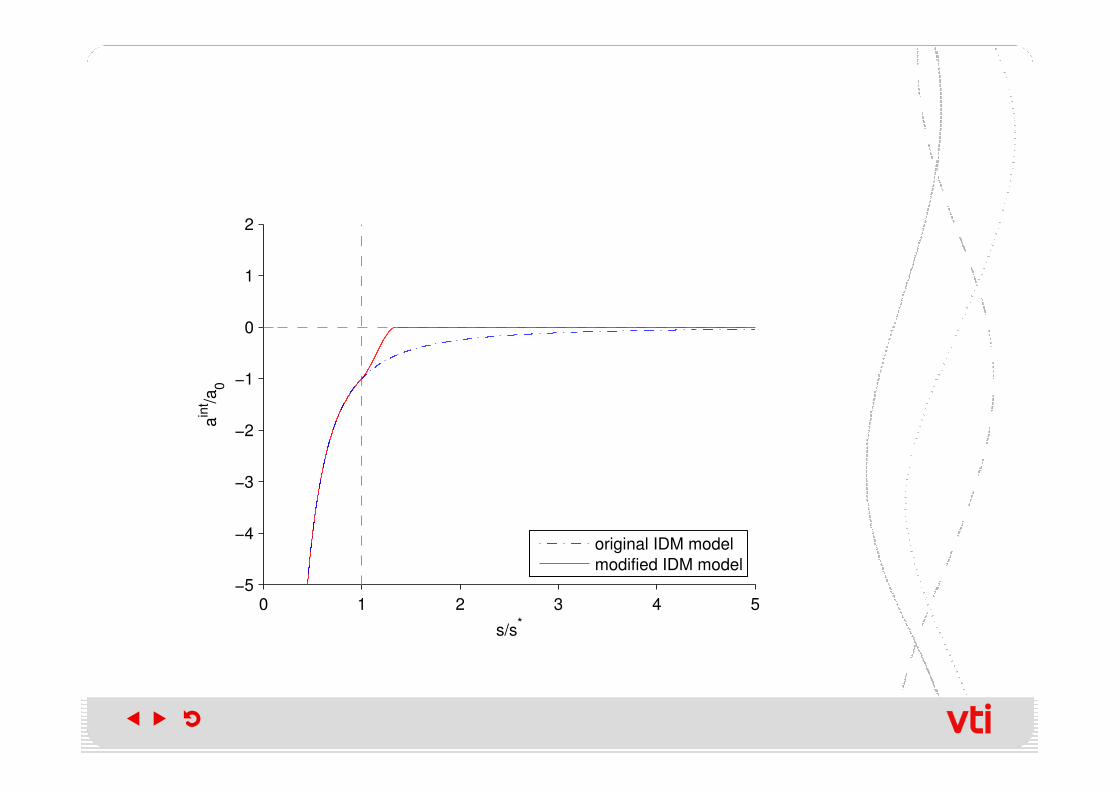
Observed problems with the IDM
The simulated vehicles did not reach their assigned
desired speed due to negative interaction acceleration
(aint
) even if the distance to a preceding vehicle (s) is
longer than the estimated desired following distance (s*)
0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
s/s*
ain
t /a0
0
4
2 0.25
0 if 0.75des
intss
v
v
a a
a
* = Þ = -
Þ ³ <

Simulated vehicles stays in the left lane…
Vehicle B does not change to the right lane since the
IDM will induce a deceleration even if vehicle A is far
away and drive at the same speed as B

The modified IDM
( )
( ) ( )
2
3 20 1 3 2 3
1
1
0
s ss s
int s s ss s s
ss
a a c c c c b
b
* *
* * *
*
-ìï <ïïïï= - × - + - £ £íïïïï >ïî
( ) ( )
( )
( )
1 23 2
32
3 4 2
2 4 2 5, ,
1 1
1 5 1 2 5,
3 2 27 2
c c
c c
b b
b b
b b b
b b
- -= - =
- -
+ - -= = -
- -
0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
s/s*
ain
t /a0
original IDM model
modified IDM model

Microscopic comparison
Comparison of the two models with the Bosch
urban trajectory data set has been done
� Comparable results (although manual
calibration of the modified IDM)
� The modified model gives oscillating
acceleration trajectories (has been observed in
real traffic and it is the basis of the Wiedemannand Fritzsche models)

Speed-flow comparison
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
Flow [vehicles/h]
Space m
ean s
peed [km
/h]
Original IDM (black)
Modified IDM (grey)
SRA speed−flow relationship
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
Flow [vehicles/h]
Space m
ean s
peed [km
/h]
Original HDM/IDM (black)
Modified HDM/IDM (grey)
SRA speed−flow relationship
IDM HDM/IDM

Conclusions
� The modified IDM result in a higher average speed for a specific flow level, a less steep speed-flow relationship and higher capacity.
� The modified IDM show an improved agreement with the speed-flow relationships in real traffic.
� The IDM's good ability to reproduce vehicle trajectories seems to be retained in the modified IDM.
� Modeling spatial anticipation makes it more important to capture the car-following acceleration behavior compared to if only one leader is considered.
� The importance of car-following and lane-changing models being well integrated is illustrated by the problem observed with the IDM model in connection with lane changes.
Related Documents











