Separability and Topology Control of Quasi Unit Disk Graphs Philippe Giabbanelli CMPT 880 – Spring 2008

Separability and Topology Control of Quasi Unit Disk Graphs Philippe Giabbanelli CMPT 880 – Spring 2008.
Dec 30, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Separability and Topology Control of Quasi Unit Disk Graphs
Philippe Giabbanelli CMPT 880 – Spring 2008

1
Spanners: why, what?
How to build a good backbone
This presentation deals with the half of the material that was left over.
We will present the theoretical concepts that we need, the algorithm and the overall simulation results.
Potential research problems
Some hints will be explained for possible follow-up works.
Simulations results

Spanners Backbone Algorithm Simulations Research problems
2
• Last time we saw that quasi-UDGs are a generalization of the UDG model, but properties are not as well understood yet.
• We showed the existence of small separators and its application to routing as a first property.
• The second property concerns spanners.
What is a k-spanner?
probability
distancer
guaranteed maybe too far
R

Spanners Backbone Algorithm Simulations Research problems
3
What is a k-spanner?
Let’s consider a graph G.
A k-spanner is a tree such that the distance between any two vertices is at most k times their distance in G.
All pairs are connected by a path of length 1.
Now all pairs are connected by paths of length 2 = 2*1, hence
it is a 2-spanner.
k tells you how much longer are the shortest paths in the spanner.
k is called the stretch factor.
T is a k-spanner of G if dG(u, v) < k.dT(u, v) and T is a tree.
dG(u,v)
dT(u,v)

Spanners Backbone Algorithm Simulations Research problems
4
Desirable properties of spanners
• You do not want the length of the longest path to increase by a factor of 10 for some paths and by 2 for some others… you’d like it to be constant
►We want the stretching factor to be constant.
• A spanner is used as backbone: a sub-network for communications.
By reducing the number of edges we make the routing tables smaller and have less interferences.
►We want the stretching factor to be small.
As the paths get longer, it costs more energy to do the transmission.

Spanners Backbone Algorithm Simulations Research problems
5
Construction presented in this paper
►We want the stretching factor to be constant.
►We want the stretching factor to be small.
Done!
Bounded by 3 + ε where ε can be made arbitrarily small
For suitable routing operations, we also make it nearly planar.
Spanners Backbone Algorithm Simulations Research problems
6
Algorithm to build the backboneLet G be the graph with parameters R and r.
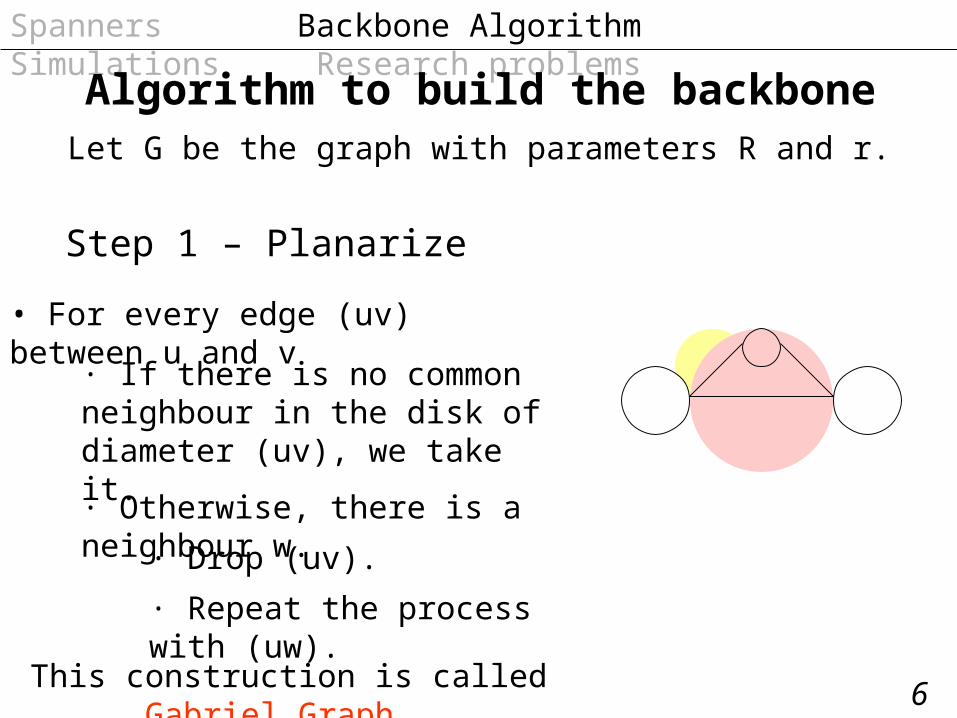
Step 1 – Planarize
• For every edge (uv) between u and v
∙ If there is no common neighbour in the disk of diameter (uv), we take it.
∙ Otherwise, there is a neighbour w.
∙ Repeat the process with (uw).
This construction is called Gabriel Graph.
∙ Drop (uv).

Spanners Backbone Algorithm Simulations Research problems
6
Algorithm to build the backboneLet G be the graph with parameters R and r.
Step 1 – Planarize
• For every edge (uv) between u and v
∙ If there is no common neighbour in the disk of diameter (uv), we take it.
∙ Otherwise, there is a neighbour w.
∙ Repeat the process with (uw).
This construction is called Gabriel Graph.
∙ Drop (uv).
Spanners Backbone Algorithm Simulations Research problems
7
Algorithm to build the backboneLet G be the graph with parameters R and r.
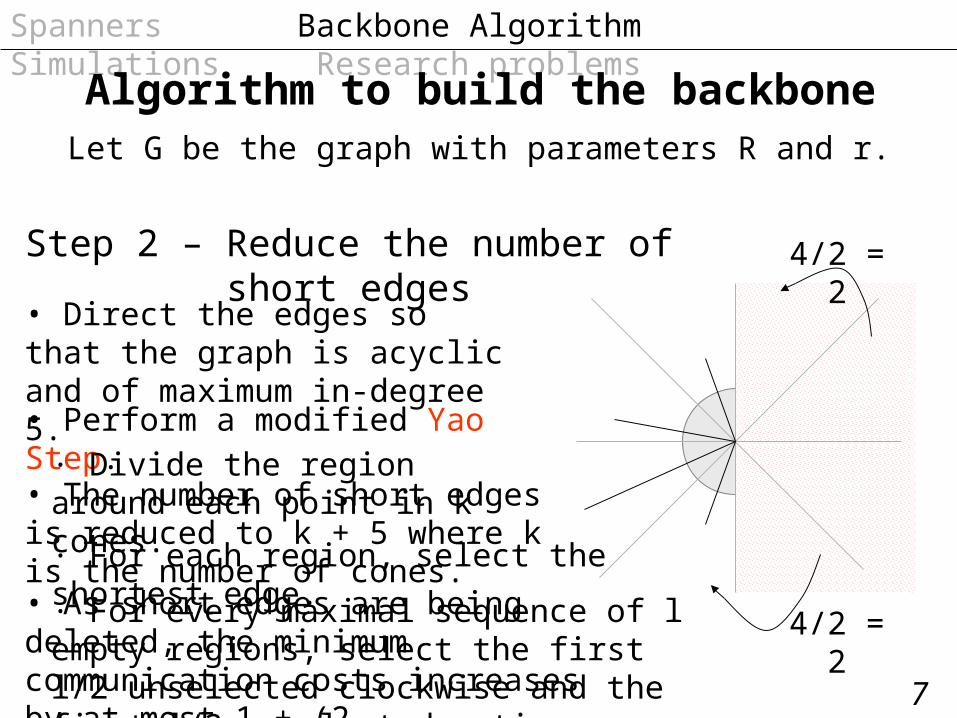
Step 2 – Reduce the number of short edges
• Direct the edges so that the graph is acyclic and of maximum in-degree 5.
• Perform a modified Yao Step.
∙ Divide the region around each point in k cones.
∙ For each region, select the shortest edge.
∙ For every maximal sequence of l empty regions, select the first l/2 unselected clockwise and the first l/2 unselected anti-clockwise.
4/2 = 2
4/2 = 2
• The number of short edges is reduced to k + 5 where k is the number of cones.
• As short edges are being deleted, the minimum communication costs increases by at most 1 + (2 sin(π/k))^β.

Spanners Backbone Algorithm Simulations Research problems
8
Algorithm to build the backboneLet G be the graph with parameters R and r.
Step 3 – Reduce the number of long edges
• Put a grid on the plane.
• An edge is considered long if it connects vertices from different cells.
• For each pair of cells
∙ Keep the smallest edge between them.
(i.e. smallest of the longest)

Gabriel Subgraph of G
Spanners Backbone Algorithm Simulations Research problems
Graph G under the Quasi-UDG model
Reduce the number of short edges
Reduce the number of long edges
Make it planar azraz
Backbone of small constant stretching
factor
Algorithm to build the backbone
Modified Yao Step
Grid
9
Spanners Backbone Algorithm Simulations Research problems
Networks topologies used in the experiments
10
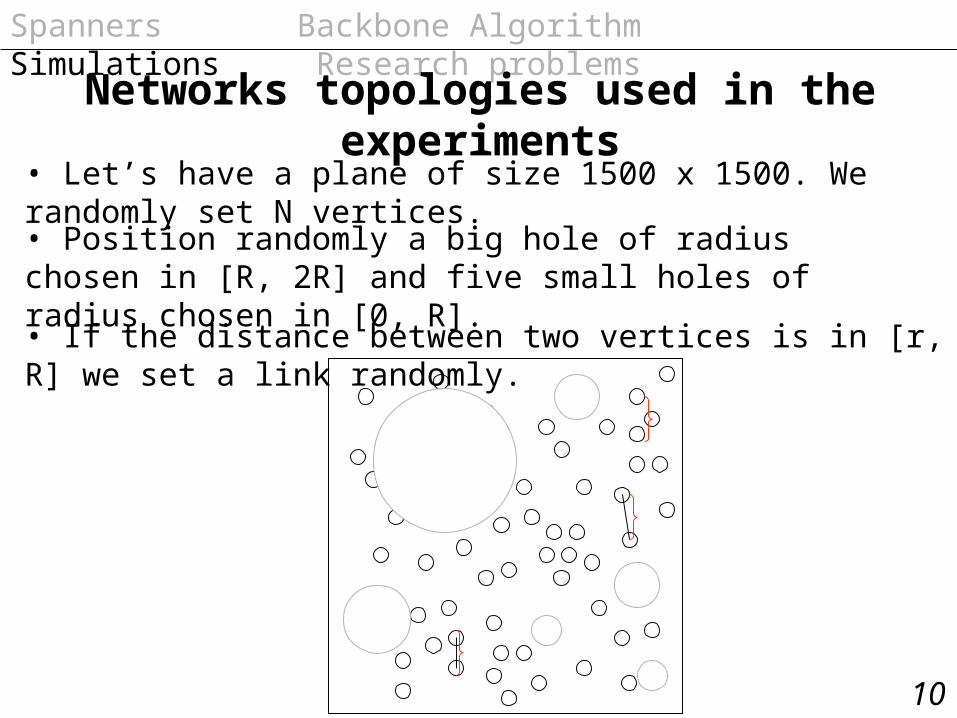
• Let’s have a plane of size 1500 x 1500. We randomly set N vertices.
• Position randomly a big hole of radius chosen in [R, 2R] and five small holes of radius chosen in [0, R].
• If the distance between two vertices is in [r, R] we set a link randomly.

Spanners Backbone Algorithm Simulations Research problems
Networks topologies used in the experiments
11
• Let’s have a plane of size 1500 x 1500. We randomly set N vertices.
• Position randomly a big hole of radius chosen in [R, 2R] and five small holes of radius chosen in [0, R].
• If the distance between two vertices is in [r, R] we set a link randomly.
By varying N from 1000 to 2000, we measure the impact of the density.
A random network is too uniform, thus holes are a simple attempt to simulate non-trivial topologies.
The values for the ratio R/r go from 1 to 10 to measure the impacts of different connectivity models.
Spanners Backbone Algorithm Simulations Research problems
Properties of the Backbone
12
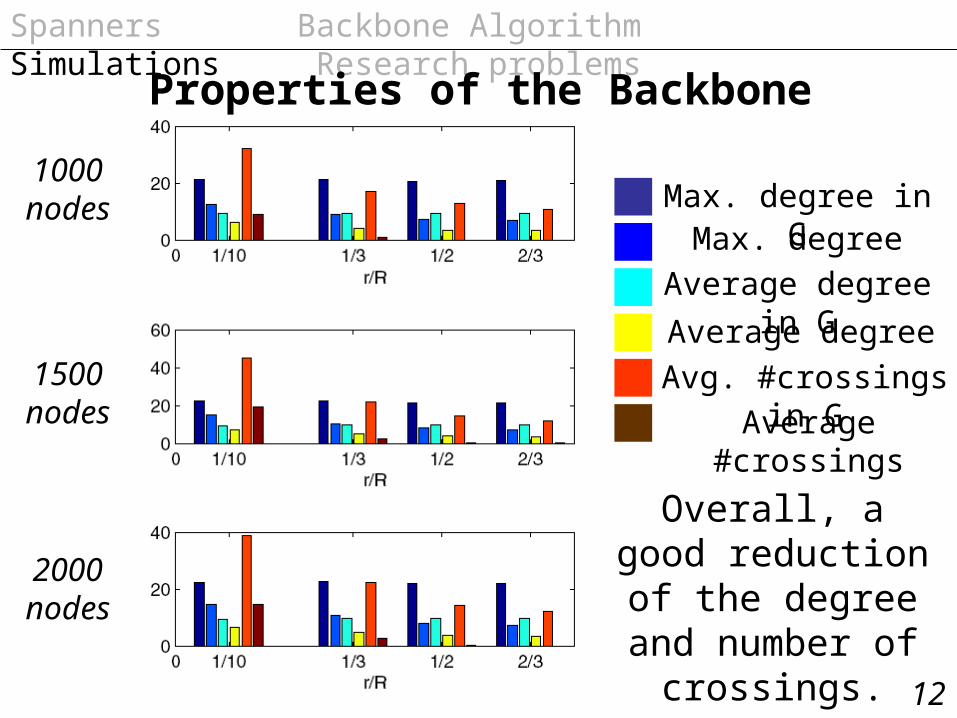
1000 nodes
1500 nodes
2000 nodes
Max. degree in GMax. degree
Average degree in G
Average degree
Avg. #crossings in G
Average #crossings
Overall, a good reduction of the
degree and number of crossings.

Spanners Backbone Algorithm Simulations Research problems
Properties of the Backbone
12
1000 nodes
1500 nodes
2000 nodes
Overall, a good reduction of the
degree and number of crossings.
Very small stretch factor (i.e. not a big increase of the length of the shortest
paths).

Spanners Backbone Algorithm Simulations Research problems
Labels and stretch factor
13
Thanks to the smallest separators, the distance labelling is better on a
backbone.
The backbones are sparser than the original
graph thus we have smaller separators.
However, the hop stretch factor is larger
on the backbone.
Spanners Backbone Algorithm Simulations Research problems
Summary
14
• Compared to a classic greedy-forwarding plus local flooding algorithm, our protocol performs much better.
• We have small routing tables, reduced interferences and still an efficient local routing.
• In this serie of presentations, we have learnt new tools and concepts:
∙ Separators (with applications to compact structures) and spanners
∙ Quasi-UDG model (and its link-crossing properties)
∙ Use of grid graphs and virtual vertices to get simpler structures
∙ Distance labelling, gabriel graphs and yao step.

T H A N K Y O U
Main article used in this presentation
Separability and Topology Control of Quasi Unit Disk Graphs (Chen, Jiang, Kanj, Xia and Zhang, IEEE 2007)
Improved Stretch Factor for Bounded-Degree Planar Power Spanners of Wireless Ad-Hoc Networks (Iyad Kanj & Ljubomir Perkovic, ALGOSENSORS 2006)
On geometric spanners of euclidian graphs and their applications in wireless networks (Iyad Kanj & Ljubomir Perkovic, Technical Report DePaul University 2007)
Other articles used to provide a better understanding
Spanners Backbone Algorithm Simulations Research problems
15
Spanners Backbone Algorithm Simulations Research problems
Can we do a complementary analysis?
16
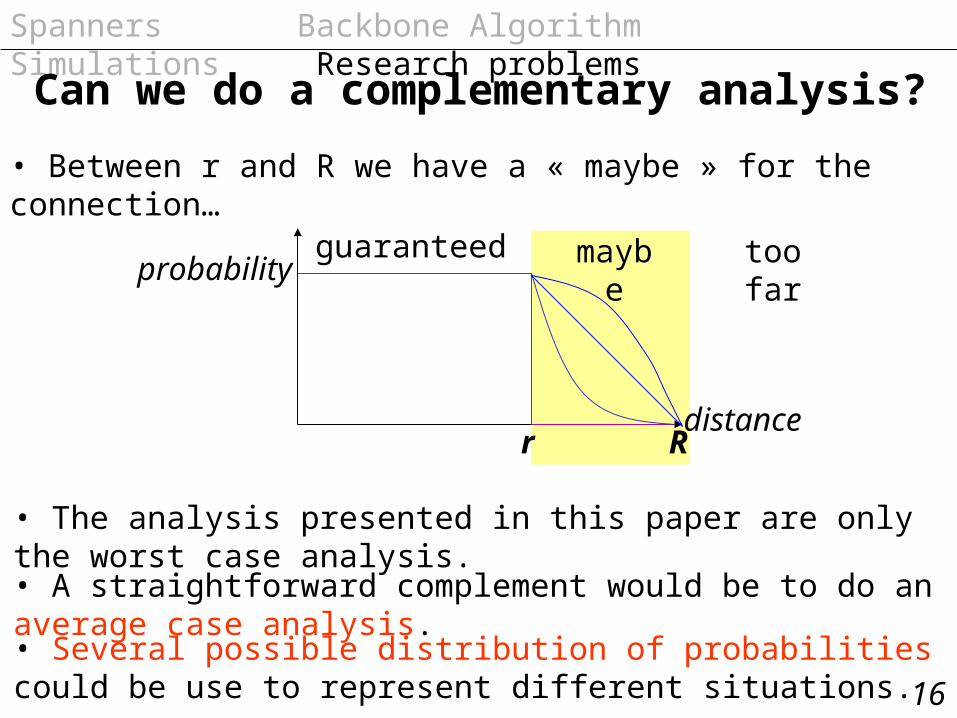
• Between r and R we have a « maybe » for the connection…
probability
distancer
guaranteed maybe too far
R
• The analysis presented in this paper are only the worst case analysis.
• A straightforward complement would be to do an average case analysis.• Several possible distribution of probabilities could be use to represent different situations.

Spanners Backbone Algorithm Simulations Research problems
Can we have more specific situations?
17
• The network topology used in this experiment is a random network.
• That might be good enough for sensor networks deployed uniformly on a battlefield or in a forest.
• However, for MANET such as laptop devices, the network is probably not that random.
∙ There are places with more users than others (cafe…) which create clusters
∙ Some systems have more bandwidth or power than others thus there should be an incentive to use them more often.
• Models for non-random real-world networks have been developped during the last 8 years (scale-free, small-world, hierarchical, …).

Spanners Backbone Algorithm Simulations Research problems
Can we have more specific situations?
18
• Models for non-random real-world networks have been developped during the last 8 years (scale-free, small-world, hierarchical, …).
• What is the influence of the properties of the topology on the results?
• Can we use the properties from the topology to create better algorithms?
∙ Routing algorithms under scale-free and small-world topologies have been published 5 years ago.
∙ They were still pretty basic without the use of labels or explicit separators.
• A network is not of one kind only, thus trade-off should be developped.
∙ Who wants to design a wonderful adaptive routing algorithm taking advantages of properties in some part of the network?

Spanners Backbone Algorithm Simulations Research problems
Can we have more specific situations?
19
• For an excellent review of properties of real-world networks:
Structure and function of complex networks, M. E. J. Newman, 2003
• Greedy routing with tree-decomposition for small-world graphs:
A new perspective on the Small-World Phenomenon: Greedy Routing in Tree-Decomposed Graphs, Pierre Fraigniaud, Report 2005
• Properties of transport in scale-free graphs:
Anomalous Transport in Scale-Free Networks, Eugene Stanley, Physical Review Letters 2005
Search in power-law networks, Adamic & Lukose, Phys. Rev. E 2001
Distributed routing in small-world networks, Oskar Sandberg 2005
Related Documents











