Section 6. Laplace Transformations Process Control: Loop Tuning and Analysis Slide 1

Section 6. Laplace
Nov 28, 2015
loop check
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Section 6. Laplace Transformations
Process Control: Loop Tuning and Analysis
Slide 1
Laplace Transformations
So why do we need to know anything about Laplace Transforms?W ll fi tl it’ t ti lWell, firstly, it’s not essential. I’d estimate that more than 99.9% of the population have never heard of them – never mind use them. But what about in control engineering?But what about in control engineering? Well, that’s a different matter. Pick up virtually any book on the subject and you’re like to be faced with at least one transfer block making use of Laplace Transformswith at least one transfer block making use of Laplace Transforms. Why? Well, the fact is that they make life easy for us.
Slide 2

Transfer Functions
As we’ve seen, we make use of block diagrams to represent the composition and interconnection of a system. p y
When used together with Transfer Functions we can represent the cause-and-effect relationships throughout the system.
A Transfer Function is defined simply as the relationship between the
Rf
p y pinput and output signal of a device.
–Ri
Rf
Vi
Vo
ii
fo V
RR
V −=
+o i
Slide 3

Transfer Functions
In block diagram representation the gain of the amplifier is G and the g p g poutput Vo (ignoring the inversion) is:
Vi VoG io VGV ⋅=
Slide 4

Transfer Functions
Supposing we had two amplifiers in series having gains G1 and G2 respectivelyG2 respectively.
Vi VoG1 VoG2
What would be the total gain of the system?
io VGGV ⋅⋅= 21
Very simple!Why?There is no time dependency
Slide 5
There is no time dependency

Transfer Functions
In the integrator circuit the output is time dependent.
–Ri
Cf
Vi ∫ +−= AdtVV i1
+Vo
∫ +⋅
AdtVCR
V ifi
o
We no longer have a straightforward relationship between the input and the output
The output (Vo) is now described in a linear Ordinary Differential Equation (ODE).
The most important point to recognize is that the output is now d d t ti d it i id t b d i d ti i th
Slide 6
dependent on time and it is said to be dynamic and operating in the time domain.

Transfer Functions
The consequence of this is that we can no longer manipulate the block in the same manner as we had done so previously.block in the same manner as we had done so previously.
–Ri
Cf
Vi ∫ + AdtVV 1
+
Vi
Vo∫ +
⋅−= AdtV
CRV i
fio
We cannot, for example, perform the simple multiplication of two integrating blocks as we had done previously.
Slide 7

Laplace Transforms
The Laplace Transform is a powerful tool used to solve a wide variety of problems by transforming the difficult differential equations into simple algebraic problems wheredifferential equations into simple algebraic problems where solutions can be easily obtained. Applying Laplace Transforms is analogous to using logarithms to simplify certain types of mathematical operationsto simplify certain types of mathematical operations.By taking logarithms, numbers are transformed into powers of 10 (or e – natural logarithms) to allow multiplication and division to be replaced by addition and subtractiondivision to be replaced by addition and subtraction respectively.Similarly, the application of Laplace Transforms to the analysis of systems which can be described by linear ODEs enable usof systems, which can be described by linear ODEs, enable us to solve ODEs using algebra instead of calculus.
Slide 8

Laplace Transforms
They also provide a straightforward method for handling the mathematical time shift associated with dead time equations. Thus, complicated analysis can be performed in a straightforward manner.Once the result from a transformation has been obtained we
fcan then apply the Inverse Laplace Transform to retrieve solutions to the original problems.
Slide 9
Laplace Transforms
ODE problem
Difficult
ODE solution
Slide 10
Laplace Transforms
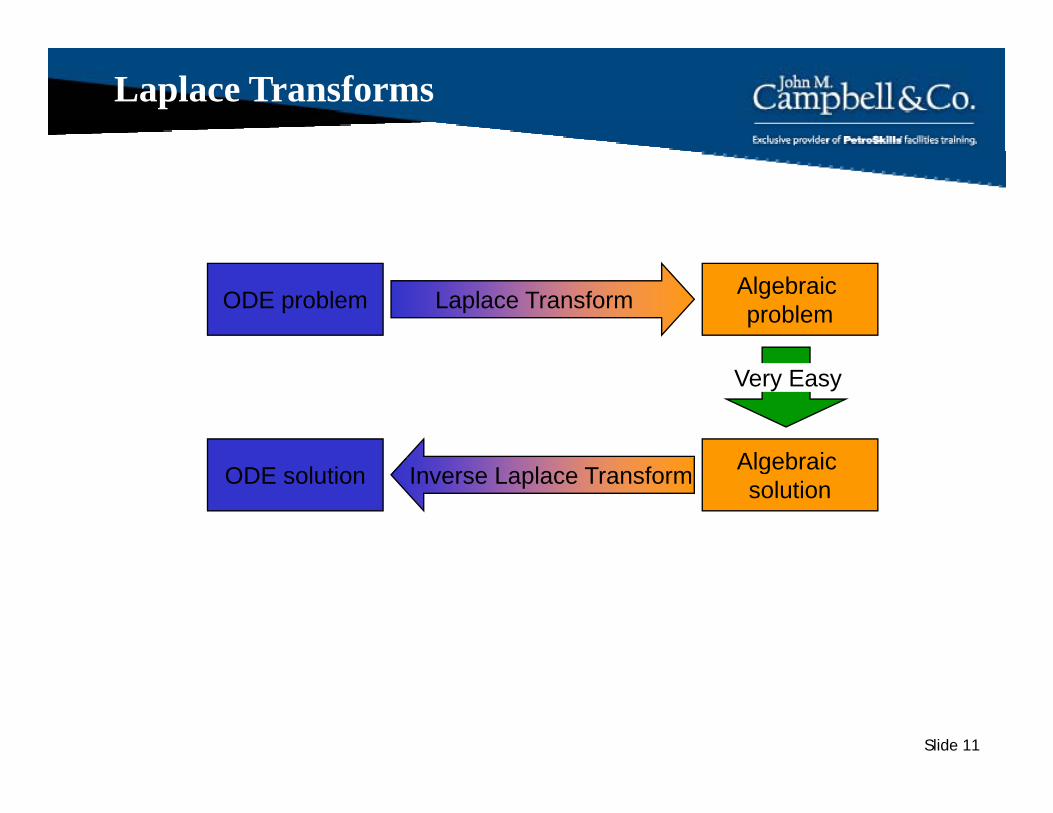
ODE problem Laplace Transform Algebraic problem
Algebraic
Very Easy
Inverse Laplace TransformODE solution Algebraic solution
Slide 11

Laplace Transforms
The definition of a Laplace Transform is:
where: ∫∞
− ≡≡O
st sFdtetftf )()()]([L
l i bl ( jb) i d d b h
= the symbol for the Laplace Transformation in the brackets; .L )]([ tf
s = complex variable (s = a +jb) introduced by the transformation.
Ho hum you thought that this was supposed to make thingsHo-hum….you thought that this was supposed to make things simple?
Slide 12

Laplace Transforms
Probably the easiest way to look at this ‘s’ operator is that it represents the derivative relative to time:
dtds =dt
Slide 13
Laplace Transforms
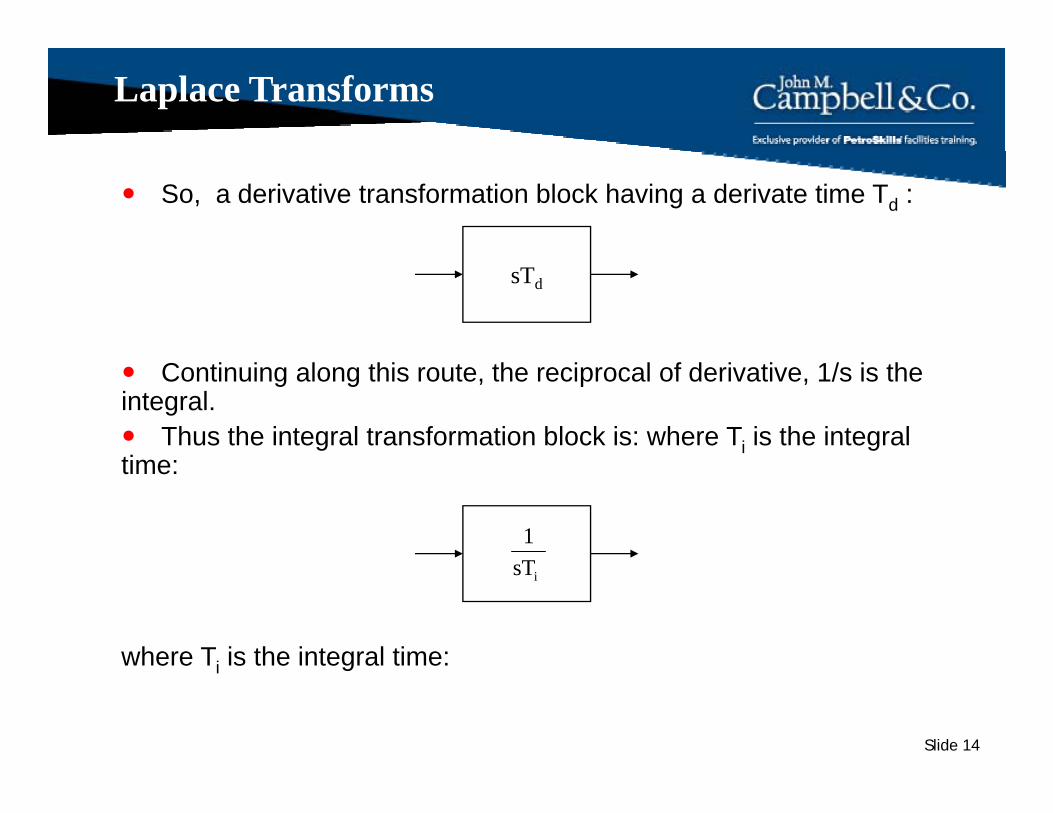
So, a derivative transformation block having a derivate time Td :
sTd
Continuing along this route, the reciprocal of derivative, 1/s is the integral.
Thus the integral transformation block is: where Ti is the integral titime:
T1
where Ti is the integral time:
isT
Slide 14
where Ti is the integral time:

Transformation blocks
G =1 sT11
+
Gain block First order lag
sTd
Derivative block
( ) ( )21 sT1sT11
+⋅+
Second order lag
T1
g
T1sT+isT
Integral block
sT1+
Lead block
Slide 15
Laplace Transforms
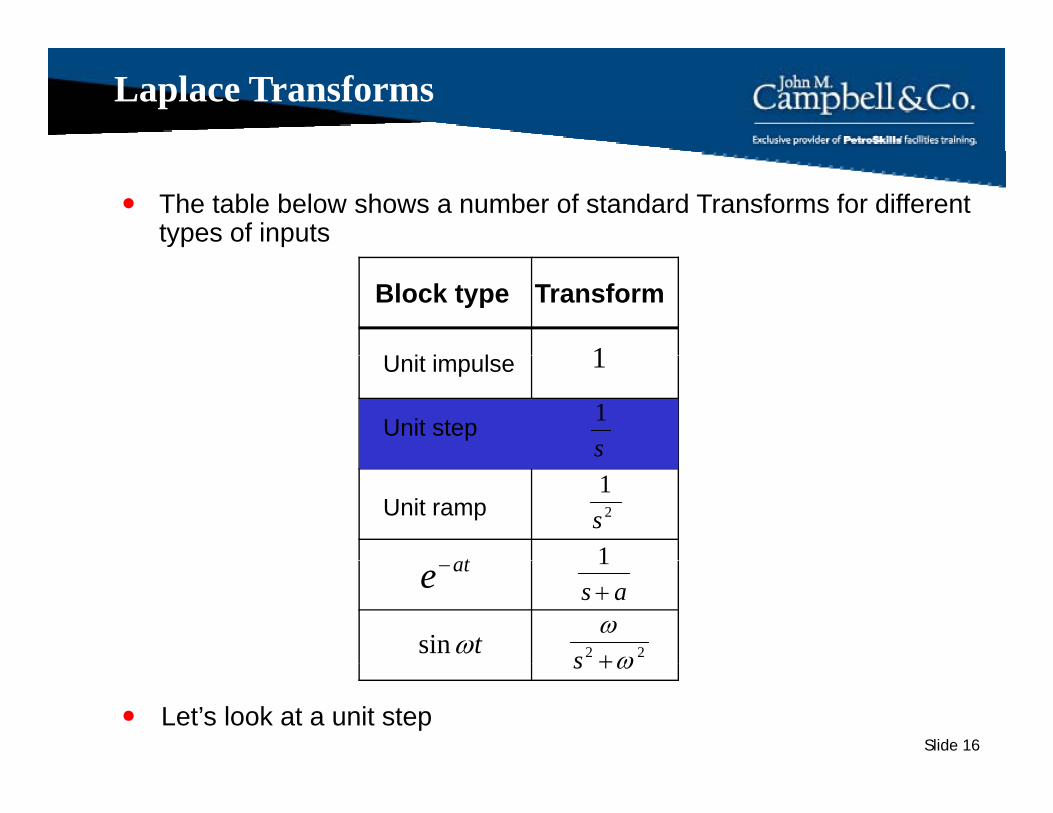
The table below shows a number of standard Transforms for different types of inputs
U it i l 1
Block type Transform
Unit impulse
Unit steps1
1
Unit ramp
1
2
1s
tas +
1
22 ωω+s
ate−
tωsin
Slide 16
ω+s
Let’s look at a unit step

Laplace Transforms
If we applied a unit step to a Gain Block what would we expect out? So, a unit step in….
G =1s1
Step input
s1
Step outputStep input Step output
….results in a unit step out
Slide 17
Laplace Transforms
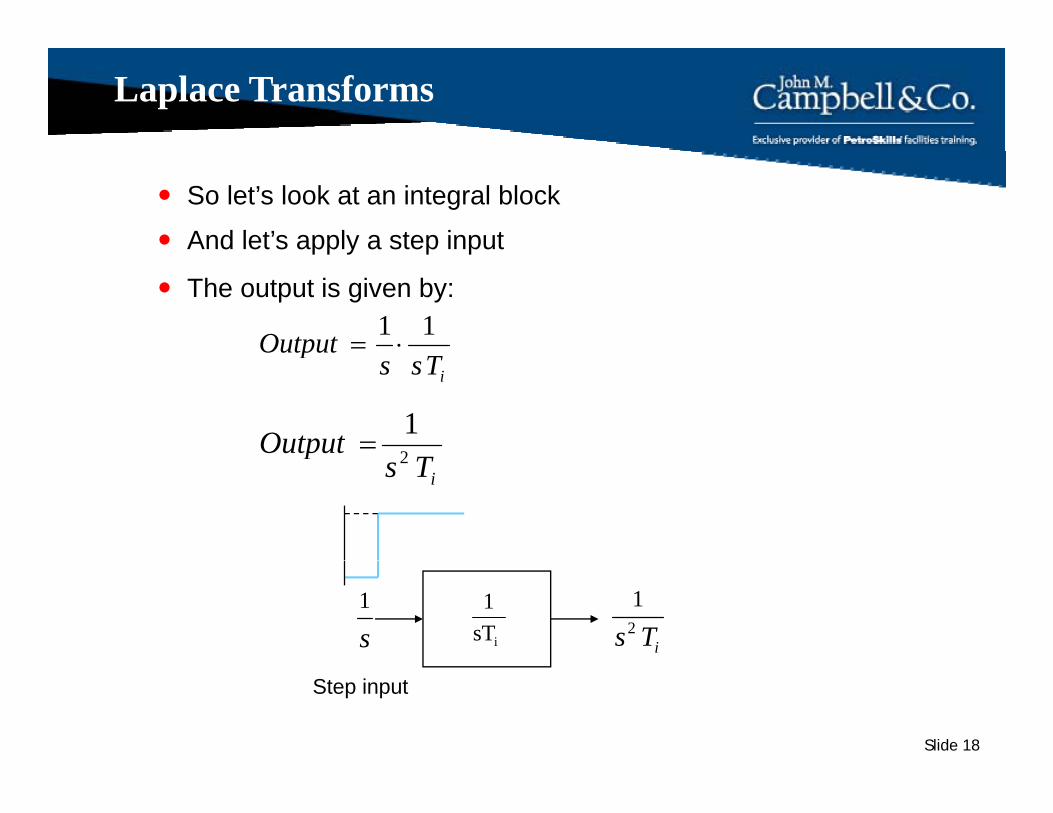
So let’s look at an integral block
And let’s apply a step input
Output 11⋅=
pp y p p
The output is given by:
iTssp
TOutput 2
1=
iTsp 2
s1
iTs2
1
isT1
Slide 18
Step input

Laplace Transforms
If we look to see what this is:We see it’s a unit ramp
Block type Transform
Unit impulse
Unit step 1
1
p
Unit ramp 2
1s
s
as +1
ω
ate−
tωsin
Slide 19
22 ω+stωsin

Laplace Transforms
So, for a step input …
we get a ramp output (with time T )….we get a ramp output (with time TI)
Which is what we would expect from an integral block
1 11
Step input
s iTs2isT
Ramp output
Slide 20

Laplace Transforms
Let’s apply a step input
We can apply the same rationale to a Derivative block
sTOutput ⋅=1
Let s apply a step input
The output is given by:
dsTs
Output ⋅=
dTOutput ⋅= 1
s1
sTd 1.Td
Slide 21
Step input
Laplace Transforms
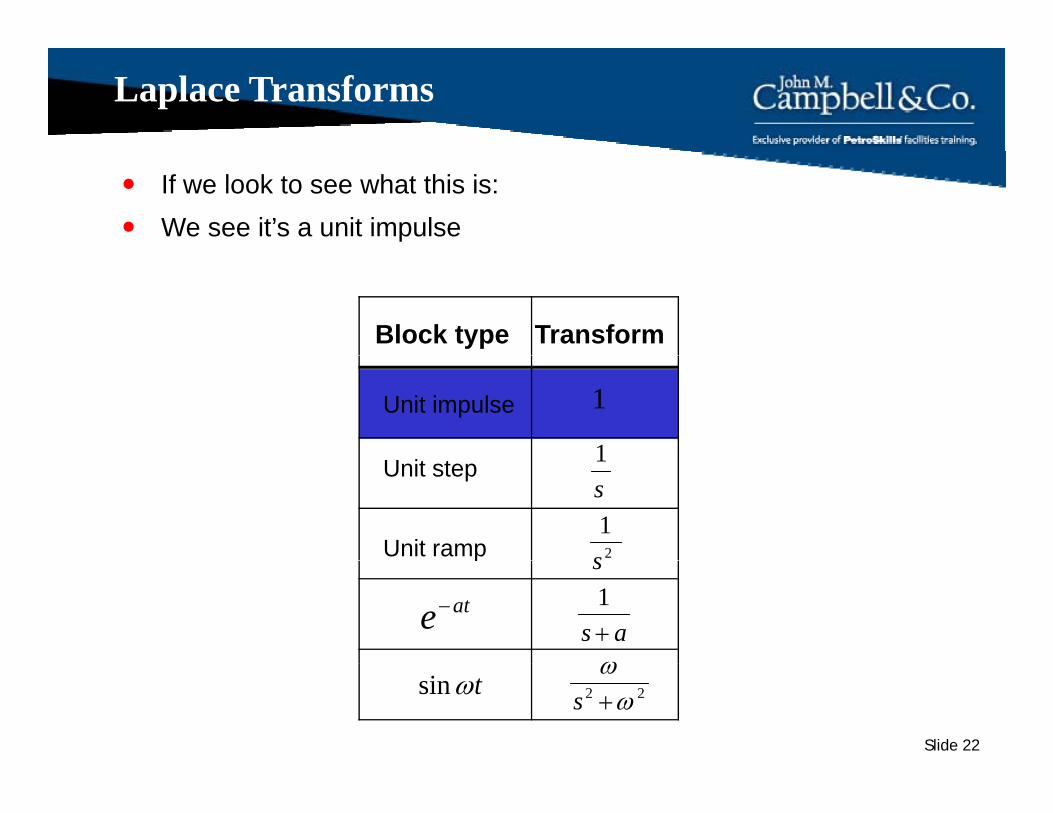
If we look to see what this is:We see it’s a unit impulse
Block type Transform
Unit impulse
1
1
Unit step
Unit ramp 2
1s
s1
p
as +1s
ω
ate−
Slide 22
22 ωω+stωsin

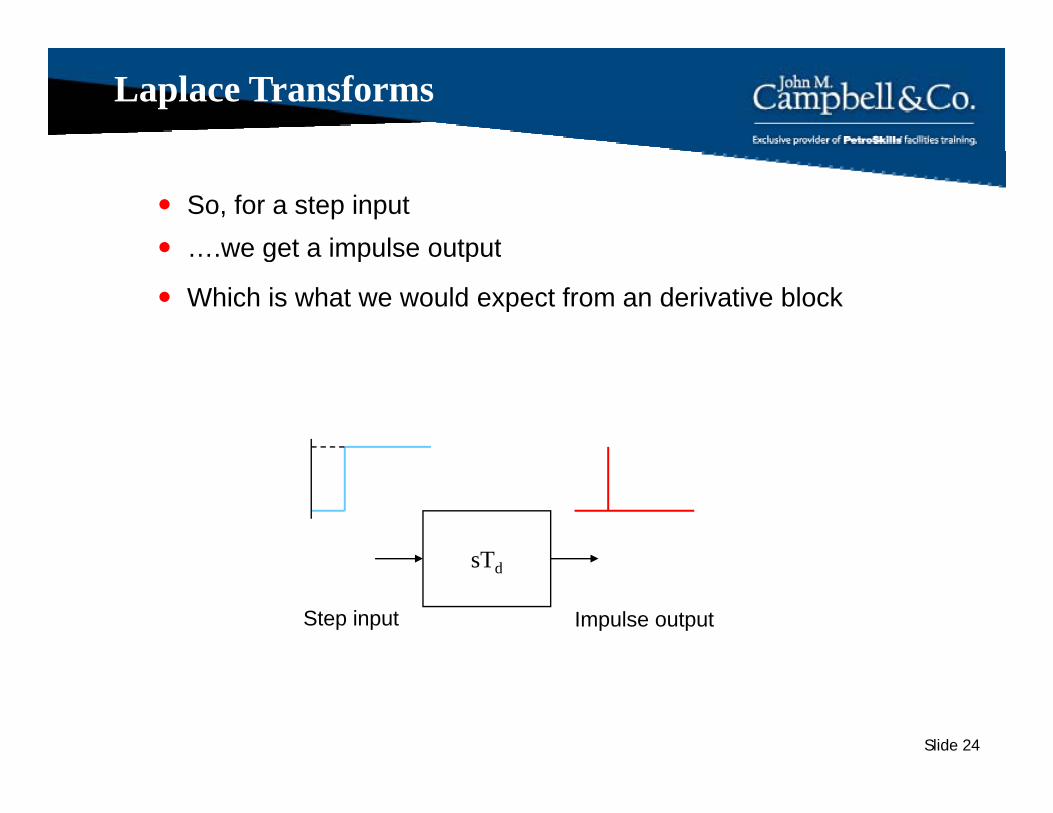
Laplace Transforms
So, for a step input we get a impulse output….we get a impulse output
Which is what we would expect from an derivative block
sTsTd
Step input Impulse output
Slide 23
Laplace Transforms
So, for a step input we get a impulse output….we get a impulse output
Which is what we would expect from an derivative block
sTsTd
Step input Impulse output
Slide 24

First order lag
The general form of a First Order Lag:
τ+ s1K
τ+ s1K
Slide 25Response time
τ

Deadtime
The general form of deadtime:
θθse− θse−
Slide 26
θDeadtime

FOLPDT
When combined the form is:
τ+
θ
s1eK s-
τ+
θ
s1eK s-
Slide 27
θDeadtime Response time
τ
Related Documents

![Lecture 6 - Laplace Transform Rev 09.03.10 [Compatibility Mode]](https://static.cupdf.com/doc/110x72/55cf8f81550346703b9d0fc0/lecture-6-laplace-transform-rev-090310-compatibility-mode.jpg)









