See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/261108229 Scientific Operations Combining ROV and AUV in the Trondheim Fjord Conference Paper in Marine Technology Society Journal · June 2013 DOI: 10.1109/OCEANS-Bergen.2013.6608194 CITATIONS 12 READS 205 5 authors, including: Some of the authors of this publication are also working on these related projects: MarMine - Exploitation technologies for marine minerals on the extended Norwegian continental shelf View project D2V - Design to Verification View project Martin Ludvigsen Norwegian University of Science and Technology 40 PUBLICATIONS 329 CITATIONS SEE PROFILE Geir Johnsen Norwegian University of Science and Technology 127 PUBLICATIONS 3,016 CITATIONS SEE PROFILE Asgeir J. Sørensen Norwegian University of Science and Technology 165 PUBLICATIONS 1,942 CITATIONS SEE PROFILE All content following this page was uploaded by Martin Ludvigsen on 03 May 2015. The user has requested enhancement of the downloaded file.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/261108229
Scientific Operations Combining ROV and AUV in the Trondheim Fjord
Conference Paper in Marine Technology Society Journal · June 2013
DOI: 10.1109/OCEANS-Bergen.2013.6608194
CITATIONS
12READS
205
5 authors, including:
Some of the authors of this publication are also working on these related projects:
MarMine - Exploitation technologies for marine minerals on the extended Norwegian continental shelf View project
D2V - Design to Verification View project
Martin Ludvigsen
Norwegian University of Science and Technology
40 PUBLICATIONS 329 CITATIONS
SEE PROFILE
Geir Johnsen
Norwegian University of Science and Technology
127 PUBLICATIONS 3,016 CITATIONS
SEE PROFILE
Asgeir J. Sørensen
Norwegian University of Science and Technology
165 PUBLICATIONS 1,942 CITATIONS
SEE PROFILE
All content following this page was uploaded by Martin Ludvigsen on 03 May 2015.
The user has requested enhancement of the downloaded file.

Scientific operations combining ROV and AUV in the Trondheim Fjord
Martin Ludvigsen Department of Marine Technology
Norwegian University of Science and Technology, NTNU NO-7491 Trondheim, Norway
Geir Johnsen Department of Biology
Norwegian University of Science and Technology, NTNU NO-7491 Trondheim, Norway
Petter A. Lågstad Norwegian Defence Research Establishment (FFI)
NO-2027 Kjeller, Norway
Asgeir J Sørensen Centre for Autonomous Marine Operations and Systems
(AMOS) Department of Marine Technology
Norwegian University of Science and Technology, NTNU NO-7491 Trondheim, Norway
Øyvind Ødegård Museum of Natural History and Archaeology
Norwegian University of Science and Technology, NTNU NO-7491 Trondheim, Norway
This paper will show how AUV and ROV can complement each other in a scientific mapping campaign in the Trondheim Fjord. To complete this survey, a multidisciplinary approach was necessary to adapt the industrial and military technology to identify and map object of interest (OOI) on the seafloor.
NTNU AUR-Lab and FFI mobilized for a collaborative cruise with ROV Minerva equipped with: video camera, dynamic positioning system, still camera for photo mosaic, UHI (Underwater Hyper spectral Imager), MRU and MBE and the AUV Hugin HUS with synthetic aperture side scan sonar and still camera as main instruments. These platforms complemented each other; the AUV had an unprecedented area capacity for mapping and search, while the ROV provided detailed information of the site.
Keywords—ROV;AUV; Survey; Lophelia pertusa; Synthetic aperture sonar; Marine archaeology
I. INTRODUCTION The state of the art for underwater vehicles, instruments,
samplers and their operations defines our abilities for research on, and management of, our biological and cultural heritage. Norway is committed to a sustainable management of its oceans and seas conserving the environment and the ecological diversity and to protect underwater cultural heritage. A knowledge based management of the marine environments is becoming increasingly important as coastal development, fisheries, offshore wind, aquaculture and offshore oil and gas are increasing and these activities are exerting pressure to marine life and cultural heritage.
The methodological challenges for marine biology and archaeology research and management are significant compared to its terrestrial counterparts. The ability to efficiently manage both science and resources is hence utterly important. All operations are to be completed by divers, remotely operated systems or robots. Divers are limited to only shallow waters – a limitation unlikely to be overcome in the foreseeable future. The last decades, research has thus concentrated on unmanned underwater operations. Present technology may be sophisticated, but often demands large operational resources. The offshore oil and gas industry and the navies have put considerable resources into development of underwater vehicles and instrumentation. It is hence natural that the scientific communities exploit the experiences made and the technology developed in these branches wherever possible.
Underwater vehicles and robotics are cross disciplinary themes, depending of knowledge from many scientific and engineering subjects. To address this fact, Norwegian University of Science and Technology (NTNU) initiated the Applied Underwater Robotics Laboratory (AUR-Lab) in 2009. This is an arena where scientists and engineers combine forces and team up, and the AUR-Lab has an operational organization maintaining several underwater vehicles.
For over 20 years the Norwegian Defense Research Establishment (FFI) has focused on the development of underwater vehicles. Together with Kongsberg Maritime, FFI has developed the HUGIN class of AUV supported by a selection of companies in the Norwegian offshore oil and gas

industry. The HUGIN AUV class is currently world leading and well integrated in the commercial survey industry. FFI has also together with Kongsberg Maritime developed the HISAS synthetic aperture sonar [1].
In December 2012 AUR-Lab and FFI arranged a collaborative cruise to enable technological and operational capacities to be tested and evaluated. AUR-Lab had prior experience running AUV of the REMUS class from RV Gunnerus, and ROV’s are routinely operated [2]. Could this knowledge and experience be expanded to use a large AUV like Hugin HUS together with ROV Minerva from RV Gunnerus in an efficient manner? The scientific AUV Hugin HUS, owned and operated by FFI was mobilized together with the AUR-Lab ROV Minerva. The goals of the cruise were to:
1. Collect data for biological and archaeological scientific purposes
2. Test application of methods and technology
3. Test and collect operational experiences
Two historically and one biologically interesting sites were selected in the Trondheim Fjord for data collection.
At Falstad the aim was to locate the “Falstadbåten” (Falstad boat), which has been lost since it was scuttled in 1945. It represents a regional chapter of the crimes of war. The German war prison at Falstad housed many Norwegian and foreign prisoners of war during WWII. As many as 200 men has been reported executed and subsequently buried in the forests in the vicinity of the prison. Most known perhaps are the so called “son-ofrene” – prominent Norwegian citizens from the Trondheim region executed after a mock trial in 1942, ordered by Reichkommisar Terboven as a warning to opposition against the German military occupation. In the last days of the war, in the early days of May 1945, the Germans reportedly dug up an unknown number of bodies, to get rid of this crucial evidence on their actions. The bodies were transported to a nearby quay and subsequently dumped into the nearby deep waters. Allegedly a small vernacular boat was used, and is said to have been scuttled in the area between Ekne and Ytterøy.
The Tautra-ridge is a threshold in the middle of Trondheim Fjord, see Fig. 4. The Tautra ridge starts on the Tautra Island and spans the 6 kilometers across to the Fosen peninsula. The ridge divides two basins of the fjord that are more than 400 meters deep, but the ridge is only 40 meters deep at the shallowest. Towards north the edge is more distinct and there are several pinnacles five to fifteen metes high. The stony corals present here are the shallowest known occurrence of cold-water stony corals, [3].
In the Trondheim harbor area there are numerous known wreck sites and the potential for discovering hitherto unknown wrecks is high, [4]. From a cultural heritage management point of view a high resolution data set of this area would be very valuable.
A further goal was to prove operations where survey data were used in real time to plan the AUV and ROV operations to pursue the potential for increasing operational efficiency. To achieve increased efficiency, parallel operations are necessary, and the results from one process must be used in the decision making during the cruise. Focus was hence put on rapid data processing for decision making on the cruise and on ability to run various activities in parallel with distributed responsibilities, but with clear communication across the operational teams.
II. METHOD The operations started with AUV survey. The vessel
tracked the vehicle using the HIPAP. Typical an AUV dive lasted 3 – 5 hours. The vehicle was then recovered and the data downloaded. Based on the findings in the data, the AUV or the ROV was deployed, see Fig. 1. The set-up onboard RV Gunnerus would allow for simultaneous AUV and ROV operations when that would be desirable. Although this was not done in this cruise, it has been proven previously [2].
A. Selected survey sites 1) Falstad
Fig. 1 Typical operation mode during the described cruise.
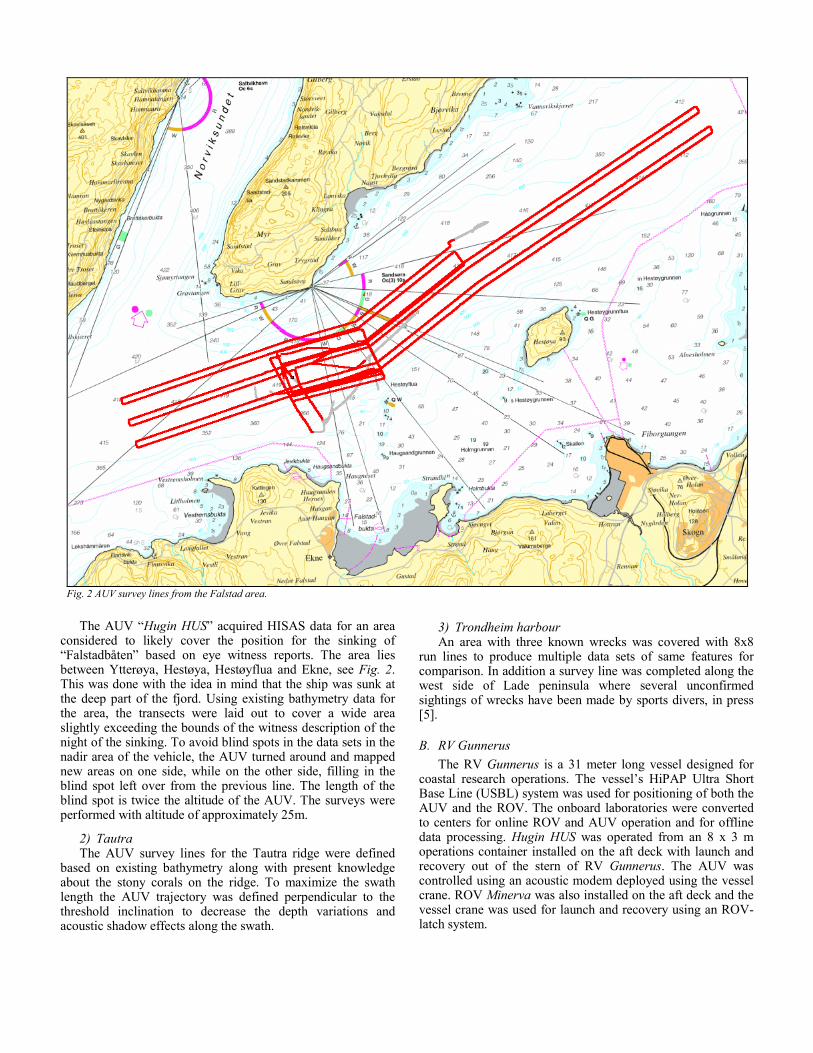
The AUV “Hugin HUS” acquired HISAS data for an area considered to likely cover the position for the sinking of “Falstadbåten” based on eye witness reports. The area lies between Ytterøya, Hestøya, Hestøyflua and Ekne, see Fig. 2. This was done with the idea in mind that the ship was sunk at the deep part of the fjord. Using existing bathymetry data for the area, the transects were laid out to cover a wide area slightly exceeding the bounds of the witness description of the night of the sinking. To avoid blind spots in the data sets in the nadir area of the vehicle, the AUV turned around and mapped new areas on one side, while on the other side, filling in the blind spot left over from the previous line. The length of the blind spot is twice the altitude of the AUV. The surveys were performed with altitude of approximately 25m.
2) Tautra The AUV survey lines for the Tautra ridge were defined
based on existing bathymetry along with present knowledge about the stony corals on the ridge. To maximize the swath length the AUV trajectory was defined perpendicular to the threshold inclination to decrease the depth variations and acoustic shadow effects along the swath.
3) Trondheim harbour An area with three known wrecks was covered with 8x8
run lines to produce multiple data sets of same features for comparison. In addition a survey line was completed along the west side of Lade peninsula where several unconfirmed sightings of wrecks have been made by sports divers, in press [5].
B. RV Gunnerus The RV Gunnerus is a 31 meter long vessel designed for
coastal research operations. The vessel’s HiPAP Ultra Short Base Line (USBL) system was used for positioning of both the AUV and the ROV. The onboard laboratories were converted to centers for online ROV and AUV operation and for offline data processing. Hugin HUS was operated from an 8 x 3 m operations container installed on the aft deck with launch and recovery out of the stern of RV Gunnerus. The AUV was controlled using an acoustic modem deployed using the vessel crane. ROV Minerva was also installed on the aft deck and the vessel crane was used for launch and recovery using an ROV-latch system.
Fig. 2 AUV survey lines from the Falstad area.

C. ROV Minerva Minerva is an observation class ROV equipped with 5
frequency controlled thrusters. The maximum operating depth is 700 meters. The vehicle is suited for operations like light sampling operations, target inspection and small surveys. A soft umbilical was used and the ROV was free flying. A fiber optical modem and with Coarse Wavelength Division Multiplexer (CWDM) allowed high bandwidth communication for HD-camera, Multi Beam Echosounder (MBE), still camera and Underwater Hyper spectral Imager (UHI). High precision maneuvering is acquired using a dynamic positioning system developed at AUR-Lab [6]. The system enables the ROV to station keep and track lines with errors <10 cm relative to the
references. The navigation sensor suite consists of USBL, Doppler log, pressure sensor and heading reference. The dynamic position system for the ROV is particularly useful for detailed surveys like photomosaic and UHI where the level precision in the automated maneuvering is unparalleled by any manual ROV operation.
D. UHI The UHI used is of the push-brow type, [7]. The UHI was
mounted downward looking at the starboard side of ROV with two 2 x 250 W halogen lights used for illumination. The unit was controlled through the ROV fiber optic system using a dedicated communication channel on the vehicle CWDM. The ROV altitude was between 1.5 – 3 meter above seafloor and
A B
Fig. 3 (A) ROV imagert of modern wreck and (B) microbathymetry of the same target extracted from HISAS data.
A B Fig. 4 (A) Coverage of the AUV survey on the Tautra shelf and (B) track overlayed sonar mosaic.
speed was 0.2-0.3 m/s and the typical transect length 20-30 m long giving 2-3 m swath width. The spectral resolution in the setup is adjustable from 1 – 8 nm. For each frame, 1600 spatial pixels in 872 spectral bins were obtained. Typical sampling rate was 20 Hz.
The UHI system provides images that look like ”high quality” images over a large area, see Fig. 6. The spectral output of reflected light (reflectance spectra of OOI) is calibrated at different binning set-ups – with binning 1 (full spectral resolution with 1 nm spectral resolution), binning 2 (2 nm resolution), binning 4 (4 nm resolution) and binning 8 (8 nm resolution).
E. AUV Hugin HUS The HUGIN system was developed as a collaborative effort
by FFI and Kongsberg Maritime, and is used by the offshore survey industry for detailed seabed mapping and data acquisition, and by navies for mine counter measures (MCM) and intelligence, surveillance and reconnaissance (ISR). Hugin HUS is 0.75 m diameter, 5.3 m long and weighs 980 kg. The power source is a pressure tolerant lithium polymer battery providing an endurance of approximately 24 hours at four knots (speed and payload configuration dependent). Hugin HUS was especially designed as a scientific AUV, and primary sensors for this survey were HISAS 1030 synthetic aperture sonar, a sub bottom echosounder and a B/W Still Camera (nadir).
F. HISAS 1030 HISAS 1030 is a synthetic aperture sonar developed by FFI
and Kongsberg Maritime [8]. The system produces ultra-high resolution acoustic images with co-registered bathymetry. To obtain these data the system depends on INS navigation and motion data from the HUGIN AUV. HISAS 1030 consists of two 1.2 m long arrays on each side of the AUV. They produce data for two SAS images of the same scene to increase the system robustness and enables high resolution interferometric data. For bathymetry data, the system is specified for 50 x 50 cm, but the resolution obtained is considerably better providing impressive 3D imaging of seabed objects. The system bandwidth is programmable, but is typically 30kHz. The theoretical area coverage is 2.6 km2/h with 20 x 25 mm resolution. At frequencies around 100 kHz, full-quality, full-resolution SAS imaging has been achieved out to 300-400 meters range, but 200 meters is typical range giving a swath of 400m.
G. Processing chain The HISAS data was downloaded and processed through
FFI’s onboard servers using the FFI developed FOCUS software suite. Sonar imagery files could then be inspected using the Kongsberg Maritime-developed post processing software “Reflection”, which in turn produced aggregated mosaics files available for import by other processing software (i.e. SonarWiz 5). Objects of interest were tagged in Reflection and listed according to priority for ROV ground truthing. Bathymetry data was extracted as point clouds. The necessary
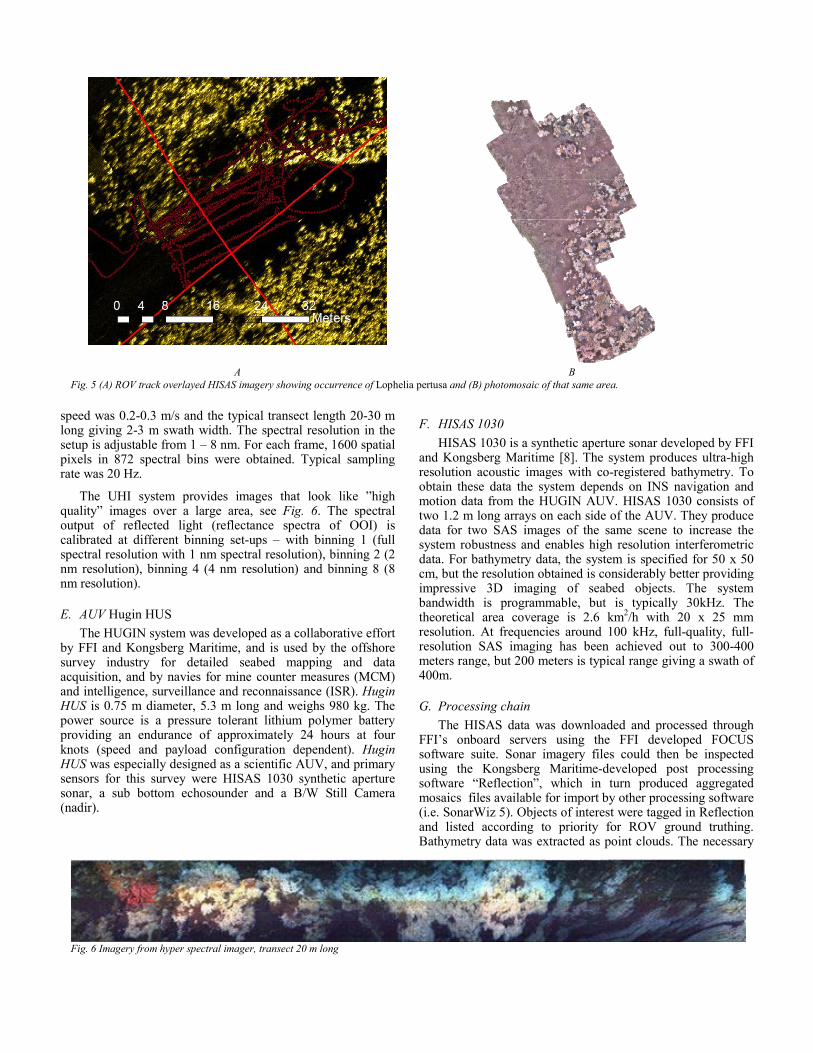
A B Fig. 5 (A) ROV track overlayed HISAS imagery showing occurrence of Lophelia pertusa and (B) photomosaic of that same area.
Fig. 6 Imagery from hyper spectral imager, transect 20 m long
scripts were provided by FFI.
Information management was a key element in the operation. To obtain our intention of using the collected data actively in our cruise planning and operational choices, data was processed and imported to a common database. A solution based on a common server with a functional level of data interoperability was maintained. Since most of the relevant data and information would have spatial properties, ESRIs ArcGIS was selected for data management. In addition this software also met the requirements for final data storage and report map production.
III. RESULTS
A. Falstad During the first two days of the cruise, a total area of 15.3
km2 was covered by HUGIN using the synthetic aperture sonar sensor. To enhance data acquisition, HUGIN did several transects at different altitudes to obtain as much valid data as possible from this part of the slope. The underwater terrain was as expected flat with soft sediments. The depth of the surveyed area varied from 400 to approximately 420 meters.
The steep slope along the southern edge of the mapped area contained some objects deemed to be of high priority. This was also an interesting area based on witness’ reports on the trajectory of the ship. 33 targets were flagged while processing the HISAS data in the Reflection software. Three targets were particularly interesting and marked for ROV inspection. One was as expected modern vessel, see Fig. 3-B, the other two were geological formations. The modern wreck in was confirmed using ROV, see Fig. 3-A. The visibility on the site was low due to soft sediments and low currents.
B. Tautra The AUV covered an area of 2.7 km2on the Tautra ridge. A
regular lawnmower pattern was used, with HUGIN going perpendicular to the reef on its main lines, see Fig. 4-B. A
small area was documented with video, HD-video, photo mosaics and UHI using ROV. Maneuvering the ROV in constant altitude in DP over the 6 x 20 m transect was successful, yielding a systematic video. See ROV track from the survey in Fig. 5-A.
Fig. 6 shows reflected light in red, green and blue creating a ”colour” image. Red indicates the coral Paragorgia arborea, white the stone coral Lophelia pertusa, brown indicates dead Lophelia. The figure shows an image of ”medium” UHI resolution and the spectral characteristics in each image pixel was excellent with spectral signatures with high signal to noise ratio from 350 – 700 indicating that all colors in the visible spectrum can be analyzed and used for further identification and classification.
C. Trondheim Harbour In Trondheim harbor the AUV covered an area of approx.
2.26 km2. 25 targets were registered in the HISAS data. Seven out of these have been identified as shipwrecks, of which three were previously unknown. In addition four targets are probable but unconfirmed wrecks. The remaining 14 targets are unidentified features that could potentially be cultural heritage.
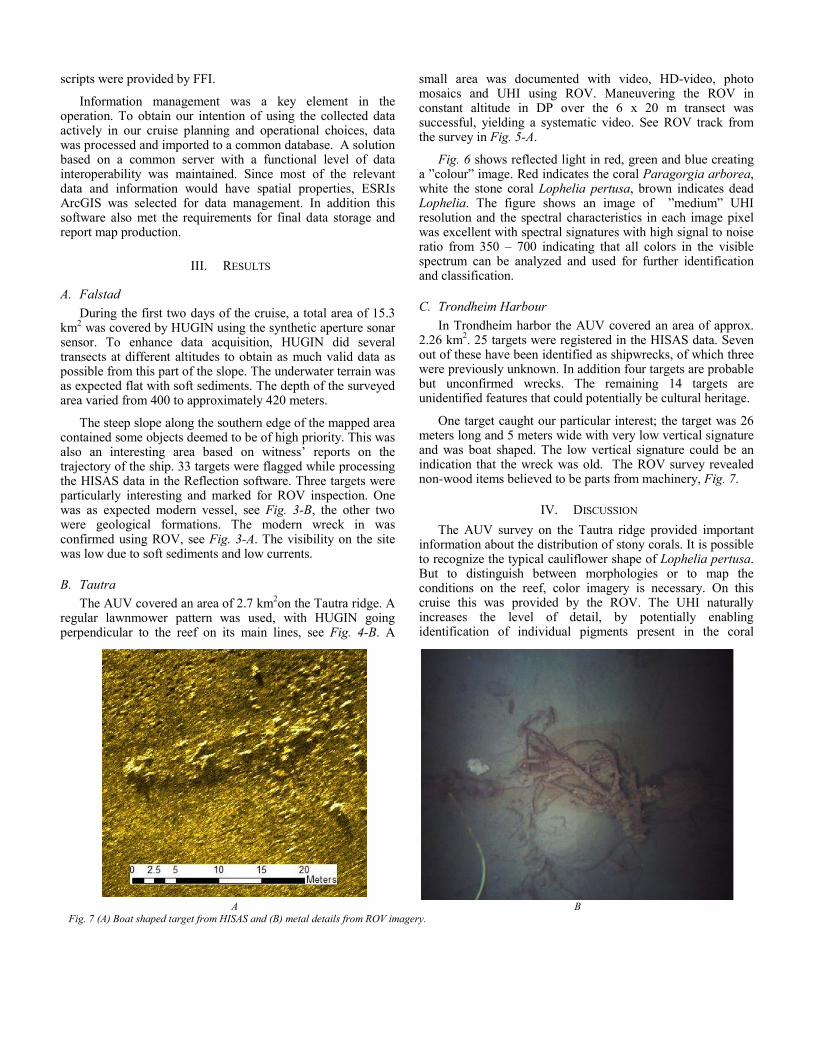
One target caught our particular interest; the target was 26 meters long and 5 meters wide with very low vertical signature and was boat shaped. The low vertical signature could be an indication that the wreck was old. The ROV survey revealed non-wood items believed to be parts from machinery, Fig. 7.
IV. DISCUSSION The AUV survey on the Tautra ridge provided important
information about the distribution of stony corals. It is possible to recognize the typical cauliflower shape of Lophelia pertusa. But to distinguish between morphologies or to map the conditions on the reef, color imagery is necessary. On this cruise this was provided by the ROV. The UHI naturally increases the level of detail, by potentially enabling identification of individual pigments present in the coral
A B Fig. 7 (A) Boat shaped target from HISAS and (B) metal details from ROV imagery.

colony and the associated fauna.
During the operation several wrecks with low vertical signatures were detected in the HISAS data. Wreck sites with such low vertical profiles can be hard to detect using ROV. The boat shape of the debris field is also challenging to catch sight of from an ROV. The ROV is however essential to further investigate targets from the HISAS data. The wreck site mentioned above proved have both ribs and machinery exposed. Such details are not available in the sonar image in spite of the high resolution of the sonar. Surveys for cultural heritage with low vertical signature will thus benefit from using AUV for detection and ROV for further identification and documentation.
One can argue that several AUVs (including the AUV) are able to acquire optical seabed images, but for both biological and archaeological purposes a real time presence utilizing ROV for target inspection is still preferred. In the future it is possible that AUVs with enhanced abilities to take optical seabed images will take over such tasks along with the general marine trend of increased autonomy in marine operations.
On a general level, it can be claimed that AUV is ideal for searching and mapping with excellent efficiency, while the ROV has important roles in detailed inspection and documentation, see Fig. 8. This coincides with the data sets presented here. But it should be noted that the level of detail in the data sets from AUV surveys are increasing, possibly making AUV’s more useful also in detailed documentation.
V. CONCLUSSION AUR-Lab and FFI have demonstrated the ability to
complete a combined AUV and ROV survey. Significant data were collected during the cruise both for biology and archaeology with the survey configuration used in the described cruise. The data presented has shown the advantage of combining the two platforms to do typical biological and archaeological investigations.
VI. ACKNOWLEDGMENT The results of this cruise were made possible by AUR-Lab
and FFI and the authors are grateful to all cruise participants. The authors would also like to thank the crew of RV Gunnerus for their invaluable help and positive attitude during the operations. NTNU, FFI, and the start-up company Ecotone AS all contributed financially to enable this operation.
VII. REFERENCES 1. Hagen, P.E., T.E. Fossum, and R.E. Hansen, HISAS
1030: The Next Generation Mine Hunting Sonar for AUVs, in UDT Pacific 2008 2008: Sydney, Australia.
2. Ødegård, Ø., Ludvigsen, M., Johnsen, G., Sørensen, A.J., Ekehaug, S., Dukan, F., and M. Moline, Managing data from multiple sensors in an interdisciplinary research cruise., in CAA 2012 (Computer Applications and Quantitative Methods in Archaeology )2012: Southamption.
3. Hovland, M., Deep-water Coral Reefs: Unique Biodiversity Hot-Spots. 2008, Dordrecht: Praxis Publishing Ltd, Chichester, UK. : v.: digital.
4. Søreide, F., Cost-effective deep water archaeology: preliminary investigations in Trondheim Harbour. International Journal of Nautical Archaeology, 2000. 29(2): p. 284-293.
5. Ødegaard, Ø., P.A. Lågstad, and M. Ludvigsen, Using Synthetic Aperture Sonar in Marine Archaeological Surveys – some first experiences, in Oceans 2013 2013.
6. Dukan, F., Ludvigsen, M., Sørensen, A.J., Ellingsen, H. and G. Johnsen, Dynamic Positioning System for a Small Size ROV with Experimental Results, in OCEANS, 2011 IEEE - Spain : Santander 6-9 June 2011. 2011, IEEE conference proceedings.
7. Johnsen, G. and A.J. Sørensen, UHI based mapping of habitats and organisms on the seabed, 2012.
8. Hansen, R.E., Saebo, T.O., Callow, H.J., Hagen, P.E., and E. Hammerstad, , Synthetic aperture sonar processing for the HUGIN AUV. in Oceans 2005 - Europe. 2005.
Fig. 8 Schematic describing typical levels of detailing of investigation for stony corals with suggestions for suitable type of vehicle
View publication statsView publication stats
Related Documents