SCHRIFTENREIHE SCHIFFBAU S. Grochowalski The Prediction of Deck Wetting in Beam Seas in the Light of Results of Model Tests 422 | Oktober 1982

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

SCHRIFTENREIHE SCHIFFBAU
S. Grochowalski
The Prediction of Deck Wetting in Beam Seas in the Light of Results of Model Tests
422 | Oktober 1982

The Prediction of Deck Wetting in Beam Seas in the Light of Results of Model Tests
S. Grochowalski , Hamburg, Technische Universität Hamburg-Harburg, 1982
© Technische Universität Hamburg-Harburg Schriftenreihe Schiffbau Schwarzenbergstraße 95c D-21073 Hamburg http://www.tuhh.de/vss

INSTITUT FÜR SCHIFFBAU DER UNIVERSITÄT HAMBURG
Bericht Nr. 422
The Prediction of Deck Wetting in Beam Seas
in the Light of Results of Model Tests
by
S. Grochowalski
Presented at the Second International Conference
on Stability of Ships and Ocean Vehicles
Tokyo, October 1982

1
ABSTRACT
The theoretical model of shipping wate~on deck in beam seas based on the lineartheory and the main statistical parameterswhich may describe the intensity of thisphenomenon have been presented.
The influence of wind and drift on thecharacteristics of water level motions atthe ship's side and on the statistical para-meters of exceeding freeboard have been ta-ken into account.
The co~prehensive model tests carriedout both in a model tank and on natural windwaves on a lake have been described. A me-thod of analysis of the experimental resultsand the main effects of this analysis havebeen presented. They have been comparedwith results of numerical calculations bas-ed on the presented theoretical model.
The statistical parameters for exceedingbulwark edge obtained bothexperimentally andtheoretically are in sufficient agreement.
NOMENCLATURE
waterplane area
relative amplitude of reflected wave
variance of random process "u"variance of rate of change of process "u"
height of ship's side measured from still
waterline to upper bulwark edge
freeboard height
bulwark height
change in draught of side due to heel esacceleration due to gravity
initial metacentric height
mean value of water oscillations on ship's
sideinstantaneous position of the water level
on the ship's side, resulting from ship
motions on the wave
relative motions on ship's side caused by
h(t)
hw(t) -
Ku("')k
L~(t)~(t)
F\.m. .J.)
DmijN. .J.)
N~.,,~J
NFnF~
p
PPo
OP(t)
roS
Su «(,»)
S"(c.J)
~w T
Tht
VdrVw
5Vw(t)
the action of the varying wind moment
resultant instantaneous water level height
on ship I s sidedeformation of wave profile caused by the
component of orbital motion in "i" direc-
tionmass moment of inertia of ship about
G-X axis
auto-correlation function of process "u"
wave number
ship length
hydrodynamic wave heeling moment
variable wind heeling moment
steady wind heeling moment
added ma$.s in the direction "i" caused by
motion in direction "j"
diffractive added mass
damping coefficient
OG
diffractive damping coefficient
index for weather side
mean number of exceedances
mean number of exceedances
distance of the metacentre
of the moving axes
distance of the c.g. from the origin of
the moving axes
probability
mean wind pressure
wind pressure fluctuation amplitude
pressure fluctuations about the mean value
wave amplitude
area presented to wind
spectral density function of process "u"
wave spectrum
ship's draught
mean period of ship's side relative motions
timedrift velocity of ship
mean wind velocity
wind velocity oscillations about the mean
valueindex for lee side
in time T*
in 1 second
from the origin
"ZU
Zoz
yF(d'
:w(t)
Yw
Ydr
rb.
öJ.»-O~(c.»-
Olow~
4,.~}-~-
~~(irJ)-
~..ru.)-
fs' rc -E"T.,1f.-
z,,"S..-
2
y
vertical component of the hydrodynamic waveexcitation forcecentre of drift resistancecentre of area presented to windhorizontal component of the hydrodynamic
wave excitation force
variable horizontal wind-exciting force
steady horizontal wind force
side resistance of drift
half-width of transverse hull section under
consideration
wave slope
phase shift due to "i" motion relative to
wavespecific gravity of water
ship displacement
response amplitude operator of motion "i"(R.A.O.)
R.A.O. of relative motions of water surface
at ship's side caused by waves
R.A.O. of relative water surface motions
caused by wind rolling
R.A.O. for wind rollingundisturbed wave potential
transfer function for relative motions on
ship's side caused by wave induced hull
motionstransfer function for relative motions on
ship's side caused by wind
co-ordinates of the ship's centre of gravity
in the stationary co-ordinate system
hull motions amplitudes: sway, heave, roll
co-ordinates of a wave particle undergoing
orbital motions, relative to the stationary
co-ordinate system
variable heel angle of ship
static ship heel
wave exciting force
taking into ac count
ratids of ship hull
lengthangular frequency
natural frequency
01.
B.~
or moment coefficientthe effect of the
dimensions to the wave
(.J-e..>,,-~-w.,-
~ -~,-t -Äh -~...(.)-
1. INTRODUCTION
of rolling
of heavingmean angular frequency of ship'srelative motionsspecific density of water
of airof duration of singleof single exceedancewave profile
exceedance
side
mean periodmean heightundisturbed
Opinions on the effect of the shippingof green water on ship safety are divided.However the opinion predominates that deckwetting presents areal danger to small, lowfreeboard ships, especially fishing vessels.Deck wetting endangers the crew working onthe deck and hinders ship operations such asfishing. Moreover intensive deck wettingmay lead to the accumulation of water on thedeck, the weight of wh ich may be significantrelative to the ship's displacement. In sucha case there may occur a significant reduc-tion in stability followed by a capsize inwaves.
These problems have been reflected insome of the paragraphs in the "Torremolinos'77" Convention on Fishing Vessel Safety.
--
As far as large vessels are concerned,opinions on the effect of deck wetting arevarious. The mass of water on deck is insig-nificant in relation to the displacement andlass of stability is minimal. In fact wateron deck may even act as a roll stabilizer(e.g. [1]). So, although deck wetting mayconstitute a danger as far as structuralsafety is concerned (e.g. in large tankers[3]), it may be concluded that stabilitysafety is unaffected.
However, capsize experiments recentlycarried out at the Hamburg Ship Model Basinindicate the necessity of verifying theseconclusions. A detailed analysis of filmstaken during the experiments shows the sig-nificance of the submergence of the bulwark.
Bulwark and deck edge submergence mayradically alter the rolling characteristicby preventing the ship from rolling back tothe vertical position. This results in aphase shift between the roll and wave motiansand hence alters the initial conditions priorto the arrival of the next wave group. As aresult of a small restoring moment the shipmay take such a leng time to return to itsupright position that the next large wavemay capsize it.
For large ships, this effect is probablyattributed to due to the hydrodynamic resi-stance presented by the bulwark motion ratherthan to the load of the water on deck.
The phenomenon is characterised by thelongitudinal axis of roll shifting from thec.g. to the vicinity of deck edge about whichthe ship pivots. The heeling moment due tothe wave is further enhanced by a moment re-sulting from the hydrodynamic force causingheaving (fig.1a).
A particularly dangerous condition aris-es when the bulwark submerges in quarteringseas. The impact of a steep quartering waveon the stern causes a lateral hull movementcombined with a rotation about a verticalaxis (sway and yawl coinciding with a lee-ward heel. If as a result of this movementthe bulwark submerges further lateral motioncauses the deck to "plough under" the water(fig.1b). These results an increase in thehydrodynamic resistance to the lateral moti-on which causes an increase in the heelingmoment. If at the same time a large, steepwave moving along the hull from the sterntowards midships, causes a large heavingforce directed upwards, then there arises anadditional heeling moment, as described above.Since the lateral stability one the wavecrest is considerably reduced, the describedevent usually results in a capsize. There-fore, for very dynamic motions in quarteringseas the submerged bulwark and deck edge canact as a pivot and severely increase the pro-babili ty of capsize. Analogous events in wh ichthe vessel heeled to large angles passed sa-fely if the bulwark and deck edge did notbecome submerged.
It may be seen then that in distinctionfrom deck wetting of small ships,where lossof safety may arise from the accumulation ofwater on deck, large ships may encounterdangerous situations resulting from a radical

3
change in the motion caused by deck edge im-mers~on. In this case it would be more cor-reet to talk of deck-edge submergenee ratherthan deck wetting. In both eases however,the occurrenee of the phenomenon is dependenton the relative motion between bulwark edgeand wave.
In the light of the observations madepreviously, it may be stated that the safetyof every vessel may be endangered by the bul-wark becoming submerged.
The submergence of the upper edge of thebulwark could then be aceepted as one of theship safety criteria*. In order to do thisit would be necessary to theoretically pre-dict the occurrence of the phenomenon forgiven weather conditions, and to estimateits intensity.
A theoretical model for deck wetting inbeam seas based on relative motion betweenwave and deck edge has in the past been pre-pared by the author ([4), (5)). This theo-retical model was verified by correlationwith model tests in regular tank waves asweil as in natural waves in a lake.
This paper compares the model test re-sults with theoretical predictions.
2. A MATHEMATICAL MODEL OF RELATIVE MOTIONS
OF WATER SURFACE AT THE SHIP'S SIDE
The derivation of the expressions de-scribing relative motions on the ship's sideand the analysis of the problem are to befound in [5]. Here only the main steps lead-ing to the final express ions are given.
The following assumptions were madeinitially:Wind and waves act upon the vessel simul-taneously. The vessel lies beam on to theincoming waves and drifts freely. The for-ward velocity of the vessel is zero;the two-dimensional wave motion is a sto-chastic, stationary and ergodic processhaving anormal probability density distri-bution;for the considered interval of time, themean wind velocity is constant and thewind velocity oscillations about this valueare a stochastic process which is uncorre-lated with the wave motions;the flow around the hull is potential andtwo-dimensional. Viscous damping forcesare only significant for roll damping;the hull executes motions which may be de-scribed by a set of linear differentialequations. Non-linear damping and restor-ing moments should be accounted for by alinearization technique;the amount of water on deck does not basic-ally influence the motions in waves.
The axes fixed in space on the watersurface 0f"2~ and ship' s body axes OY.Yz. werechosen as shown in fig.2 .
The following ship's motions equations
~ It should be noted that the bulwark-edge immersionas discussed he re should not be confused with deck-
edge or bulwark-edge immersion determined for sta-
tic calm water conditions, hitherto in use.
were formulated in accordance with the as-sumptions given above:
sway:
~+mJ~+N,,~ +m,.,c:p+t\,~ =Y,{t) + fw(t;)roll:
(J.t mJ~+N"cf+m,'~4 + N"!I~+ llGMocp= Mjr)+Mw(heave:
~+m:tJ~G +N~l~G +~AW~G =LF(f.)The assumed linearity of the dynamics
and the assumed independence of waves on theinstantaneous wind speed make possible theapplication of superposition and the separa-tion of motions and deck wetting caused bywave and by wind.
(1)
2.1 The Oseillations of the Water Level onShip's Side, Caused by Regular Beam Waves
The hydrodynamic exciting forces and mo-ments in equation (1) are given as foliows:
Y{t)=l Än +m)ii +N~ n +m) a. + Nb Ci..F" ? i .i,w V'J"w '.fIJ'Cw '4"
~.,
M (i:)=Y ~OMo( +m Di( +1\1119<.+m:P n +Nb n+DGy'(t) (2),."'" If" W "!I'lw 'I'J "lw F
ZF(i}= ~r 't Aw Sw + rn~ ~w + N:: twThe wave velocity and acceleration componentsappearing in the above equation were derivedfrom the weil known relations:
-.1 o~"1 . -M:!
d E.k~w-~ dT ~.O ~w-op f=O- a~
where the velocity potential ~. of the un-disturbed flow is geven by the following form:
(3)
(4 )
Assuming that the added mass and damping coef-ficients appearing in equations (1) and thecorresponding diffractive added mass and damp-ing coefficients in (2) are known, it is pos-sible to solve (1).Since the steady-state motions are of inter-est, particular integrals of the followingform are sought:
r. l. )lf:: tfo COS\CJ1.+ ßcr~,i=~ocos(c.Jh'ß~) Sc;= 1oc.oS(GJt+ßf)
(5)
The solution of (1) gives the ampli tudes Cf.'2 '
!, and the phases ßcr' ß'I'ßr .
o The instantaneous water level h(t) onthe ship's side is the result of the hull mo-tions, the wave motion and the distortion ofthe wave on the ship's side. The method fordetermining the water level on the ship'sside is shown on fig.2. Let us consider forexample, the lee side.
The water level height hz,= ZZ' relativeto the calm water waterline (po~nt Z) in theposition "1" is given by
hz(t)= ~~(~L where fi:(i:)= Sw(i)!~,~~z(i)(6)
The vertical ordinate for Z is:
~:L= S(i'+Y sirup-OG c05ff= öG+ ?,+ysincp-OGeosCf

4
and the abscissa of Z' is
~z,=~~- Z2SirHy=~,+ycoS<f +OGsintp-Z'ZsLntpSimplifying in accordance with the lineartheory gives:
~,%,='2,+ y ~'%= S,+ Ytf
hz(t)::f h; (i:)
By taking into account the distortion of thewave profile OSw at the position having abs-ciss
2z', the water level on the lee side
may be expressed by :
(7)
hz (i)= ~w(t,2z') + O~w (ir'2z')- 'S,(f;)-ycpH:)
'rGH:) and tf(i)
(8)
where the functionsby (5).
The time dependent co-ordinate ~z' showsthe direct influence of sway on the ship'sside water level height, resulting from thehull'S change of position relative to thewave profile.
The resulting wave profile may be ex-pressed in terms of the body axes by:
~~)t)= ro COS [k~. COS(wt + ßt)+ k!l- "t. ]
are given
(9)
As can be seen the regular wave ceases to beharmonie in the moving co-ordinate system,since the argument of the eosine function isanother time dependent harmonie function.
Further analysis showed however that thedifference between the wave profile in thestationary co-ordinate system and the ap-parently distorted profile relative to bodyaxes, is very small for waves having a highwave length to wave height ratio and maytherefore be ignored in computations. There-fore, the direct effect of sway may be ignor-ed and it may be assumed that 'Z,&.~!:j.
The determination of wave profile dis-tortion in a form which may be applied analy-tically is difficult. In order to determinethe resulting deformed wave profile on theship's side it is necessary to determine theresultant velocity potential
~"which is the
sum of the radiation potential ~. 'the un-
disturbed wave potential q>. and the diffrae-'tion potential ~». It is then possible tofind the amplitude and phase of the deformedwave profile from the free surfaee boundaryeondi tion :
( -S + cS" )=.i ~I
(10)w )w 2 at 1&0
Hitherto the resultant potential ~v fora hull rolling in waves eould only be deter-mined numerieally. (Computations of waveprofile distortionObased on (10) using themultipole potential method has later earriedout Dudziak [,) ). However, it seems that ifthe calm water added mass and damping eoeffi-eients and diffraction eoeffieients are known,then it would be possible to formulate ananalytical expression for the wave profiledeformation, based on existing theoreticalpapers.
A hull oscillating on the calm watersurface generates a system of progressivewaves travelling to infinity (damping), andloeal disturbanees taking the form of stand-ing waves (added mass) [8)
The well-known relationship between the
-- -
amplitude of the generated progressive waveand the motion damping (per unit length) isfollowing : .
I-tt
- l.NU - (.)3Aii (11).
If the reverse situation is now eonsider-ed in whieh the progressive wave meets a sta-tionary hull then as a result of the impactand deformation of the wave, a similar pheno-menon to that described previously, occursi.e. loeal disturbanee and a reflected pro-gressive wave. The quantitative relationsbetween the parameters of these systems ofwaves and the respective diffractive elementsof the wave exciting force must be the sameas before, since the physical nature of thephenomenon is the same ([1],[gJ ).
This paper has described that part ofthe deformation which is considered to domin-ate i.e. the deflection and reflection of theincoming exciting wave. The diffractivedamping of the wave exciting foree is relat-ed to this phenomenon.
Resolving the orbital motion of the par-tieles of the exeiting waves into two compo-nents in the direetions of the axis 0-2 andO-~ '
and making use of the dependenee (11),the relative amplitudes of the refleetivewaves may be defined as :
~=~O::ll ~r;3' Ä2= ~h'~=~l N~~3 (12)
where aecording to [10] is taken
N11
N "\9 - e-kT 5~n~~i. = 1. i.i. a - 1::p-
The generation of refleeted waves is directiyrelated to the wave partiele veloeity. It hasbeen therefore assumed that the maximumvalues ohr an~ öhp occur at t~e momer:twhen they atta~n the max~ma of ~w and 'Zw .Taking into aeeount in addition, that inview of the refleetion phenomenon, the signof the deformation should be opposite tothat of the eomponent veloeities in the un-disturbed wave, the phase and general formof the refleeted wave is taken to be asfollows :
oh~= 1;Ä\ '05 [(kQ-c.Ji) +f Jeh ::[1; Ä?cos(kV-CJi) for the
'Z l-r. Äpcos(k~-(,Jt)for the
(13)
weather side
lee side(14)
The height of water level on the leeside may now be written as follows :
h&(t)= 1; cos(k~-{.Jt)+ r. ~c.o5(ky-c.vi +1) +
- r. Ärc.os(kY-CJt)- roCOS(c.>t+ßt)-y ~ cos((.)hß.,)
The above funetion ealled next as "thefunetion of water oseillations on the leeside" is the sum of harmonie funetionshaving the same frequeney ~ and may there-fore be written as
(15)
hz (i)= 1;, 8hZ c.os ((,.)1: + ßz)
where the amplifieation factor
ßz are determined from :
(16)
5hz and phase

5
c5'hz{c.»::{yac5.,&+~& + Ät+(1- Ä,f+2.,::\ö"orcos(ß; ~)+
+ 2.y 0:,~SLn (ßtky)-2.y8.r(1-Är)c.os(ß., + ky)+ (17)
+2~~ 5in{~/ky)- 2.0r(1-Ä,)c.os(~J +ky)]%
wa-
The influence of the wind is character-ized by changes in the ship's response.
In accordance with the assumptions, theinstantaneous wind velocity may be consider-ed to be the sum of a constant mean velocityVJN and the velocity pulsations oVw~ aboutthe mean.
The mean pressure p (corresponding toVw) results in a constant horizontal forceYw caus~ng drift and a constant heelingmoment Mw. - &
Y = k -5 = k S ~ (22)w wp w 2-
Mw= kwp S(Zs-Zo) (23)
The drift is resisted by a side force
Y =(, LT ~Vd;tJr "s 2.
The drift velocity may be determinedby equating (22) and~
Vdr=Vw~~(25)
The non-dimensio%al coefficients kw andKs are usually determined experimentally.
The influence of drift on rolling andconsequently on the characteristics of wa-ter oscillations on the ship's side, appearsas a change in the excitation frequency :
CJf' = c..>- k V",The moment ~w causes a static heel es
towards the leeward side,
es= A~M.(26)
about which the ship rolls.Consequently the mean draught on each
side changes by:
F"= ~es (27)
-- --
( 18)
i.e. decreases on the weather side and in-creases on the lee side.
The pressure pulsations 6p(~) (correspond-ing to ÖVw(~) ) causes a time varying aerody-namic horizontal force :
oy" (i;)= k,,5 Op(t) (28)and moment:
<5 Mw{i:)= kwS(zs- KG)öp(i) (29)
The varying moment öM.(t) causes rollingwhich is similar in theory to that caused bywaves. Assuming that the pressure pulsati-ons about the mean value are a random conti-nuous stationary process, it is possible toexpress them as a harmonie series. The rol-ling characteristic may then be determined bysolving the equations of motion (1) and ex-pressing the exciting forces and moments by(28) and (29) while assuming the wave excita-tion to be zero.
As a result, the amplification factorfor wind excited rolling O~ and the amplifi-cation factor öt for horizontal oscillationsare obtained. w
In view of the great inertia of the ves-sel as well as the large side force Ydr rela-tive to the small values and short durationof the force ÖYw(t) , the sway caused by windfluctuations is negligible.
The wind rolling will cause symmetriewater level oscillations on the ship's side,given by :
(19)
where theamplitudeby:
hw(t)= y P.O.,,,(W)S~I't((')t+f.,,) (30)
R.A.O. for these oscillations perof exciting wind pressure, is given
2.3 Water Oscillations on the Ship'sSidein Natural Conditions
(24)
In natural conditions, the wind and wa-ves act on the ship simultaneously. The re-sultant water level on the ship's side hT(~is the sum of wind oscillations and waveoscillations:
h,.=(i:) = h~(i:} + hw( -I:):!: Y e$
where the index "N" - indicates the weatherside and "zn - the lee side.
Since the waves and wind are continuousrandom stationary processes and the ship mo-tions are described by a set of linear diffe-rential equations, then the function describ-ing water level oscillation on the ship'sside, is also a continuous random, stationaryfunction.
For known statistical characteristicsfor waves ~w(t) and wind op(t) it is possibleto determine the statistical characteristicsof the ship's side water oscillations on con-dition that their transfer function is known.
The water level oscillation can be de-scribed in the following complex form:
(32)
HTII(t)=<P~N(i.(.))'1 (t)+(P. (i.(.»)c5 p{t):!:yes (33)
" "z. )" wwhere the wave induced water level oscillati-on transfer function has the form :
(34)

6
and the wind induced transfer function isgiven by
(35)
The response amplitude operator (R.A.O.)for wave-induced oscillation O,,(w)is deter-mined from (17) for the lee side and from(20) for the weather side. The respectivephase characteristics are given by (18) and(21). The R.A.O. for wind induced oscilla-tions is given by (31).
The variances of the water level oscil-lations (OT) and of the velocity of oscilla-tions (OT) are given by :
... ...
DT: =f5,,~ (ev)dc..>+
S5..w(w)d.c.:> = Dh~ + DhW
(36)
0.. 0 -
1I'N =rc.l.S"N(w)dQ + Sc.J2.S"wlcv)ctc.J=DhH+ Dliw(37)..v;-
a.~' Z 0 Z
where the wave induced oscillation spectrumis given by
Sh"(CV)= [Ö,,:(Q)Y ~w(c..» (38):z:
and the wind induced spectrum :
S"w(W)=[ 6"w{(.J)t Sp((.)) (39)
In reality, the varying wind inducedheeling moment is very small compared to themoment of inertia of the ship and wave exci-.tation moment. consequently, the amplitudesof wind rolling are very small and their ef~feet on the ship's side water oscillationsand their variance are negligible. It cantherefore be neglected in practical calcula-tions and only wave induced oscillation vari-ance be considered
-...
D/= D..=S~(w)cLc., j D+= D~ =Sw' S,,(c..»cL(,J (40)
o ·As in the case of waves, the probabili-ty density of instantaneous values of the os-cillation function h(t) is normally distri-buted whereas the amplitudes of the oscilla-tions are a Rayleigh distribution. The pro-babilistic properties of the function h(t)are shown on fig.3 .
By determining the variances Dh and Dnfor each side it is possible to obtain allthe statistical characteristics of the rela-tive motions on ship's sides.
3. STATISTICAL CHARACTERISTICS OF DECK
WETTING
It has been assumed that deck wettingoccurs when the water level rises above theupper edge of the bulwark. On the basis ofthis definition the evaluating of shippingwater on deck resolves itself to the deter-mination of the statistical characteristicsof the exceedances of a level F by a ran-dom function h (t) (see fig.4)
h(t).F
The derivation of the parametersterizing the intensity of wetting andcussion of them may be found in [6].basic characteristics are following :
charac-a dis-The
a) assuming that deck wetting occurs when thevalue of function h(t) exceeds the heightof the freeboard (from normal distribution):
~ =P(h>Fo! F:,)= i - ~(~) (41)
t T
h . l'i\'x)-.L J-rd.l _ Laplace integral
W ere.':t'~-271" e 'L function,
o .variance 0T calculated by (36) or
(40) respectively for the weather or leeside,
Fw - is taken with "+" for the wea-ther side and "-" for the lee side.
The quantity p~ can be interpreted as theratio of the total duration of the exceedan-ces to the total duration of the process(fig.4)
(42)
b) assuming that the deck wetting takes placewhen the amplitude ho of the water leveloscillations exceeds the height of thefreeboard (from Rayleigh's distribution):
~=P(h.>I;~Fw)= exp[- (~~~..)2.J
The probability may be interpreted asratio of the number of exceedances total number of amplitudes ho, duringtime interval T*
p.-.!L~- N~~~~_~~~~~~~~~~_h~!gh~
Eh =ifD: [1-2 ~(tg.)] exp (~!~.J
(43)
thethe to-the
(44)
(45)
N =w. T- expLlE!F..)a]F 21T l 2.DT
,~ mean frequency of water
(3"YIrT
oscillations on the
T ship's side
(46)
where
where NF is determined from (46).
~~~~_~~E~~!~~_~~_~_2!~gl~_~~~~_~~~~!~g~~~~L.:.
where the mean duration of deck wetting1:(is
given by (48).

t.h =~ 1271"1),.' (50) N=f~ (51)
F F h
1: =f- ~(52) ~h=~~. 1: (53)
F
All the discussed statistical exceedanceparameters are functions of the freeboardheight F, as well as being dependent on thedynamiccharacteristicsof the ship (Oh(cJ))and on the wave and wind spect~a S~(~),Sr~(which is expressed by the var~ances DTand D+ ).
For a particular ship and for a part i-cular sea state the exceedance parametersare directly related to each other.
The relations between three main ones(~h ,~ IN,,) are as follows :
- Z1fwhere 1;; =w:-
hThese relations confirm the ~ntuitive under-standing of this phenomenon.
The most interesting relation is thecommon dependency of the mean duration ~ ofa single exceedance and the mean exceedanceheight ~ , since the danger of the bulwarkgoing under water and water on deck is govern-ed by these two parameters.
As can be seen from (53), the mean ex-ceedance height is directly proportional to'the mean per iod of wetting. The magnitudeof the coefficient of proportionality isgoverned by the variance of the velocity ofwater oscillations on the ship's side D+.This is affected by the character of the os-cillation'stransferfunction o;,Cw) as wellas by the wave spectrum 51 (e".)and by theirrelative positions. W
The more the maxima of 0hCc.J) and 5,...(,-,)are shifted to the higher frequencies, thegreater D+. This means that if more ener-gy is carried by the high frequency wavesthen, for a certain mean duration of a singledeck wetting, the exceedance heights aregreater.
For a given spectrum, the exceedanceswill be the higher, the greater the ship'stendency to execute high frequency motionsi.e. the greater the ship's "stiffness" .
4. MODEL TESTS
Model tests on ship motions and deckwetting were carried out at the Ship ResearchInstitute of the Technical University Gdansk,both on regular waves in towing tank, and innatural wind-wave conditions on a lake.
A typical low-freeboard side trawler,type B-14, which is used by the polish fish-ing fleet, was selected. The main parametersfor the 1:25 model were :
A = 76.0 kG
Lpp=215.4 crnB = 36.0T 17.3B 19.8
FN 4.4Fo 2.5Fl 3.5F2 4.5
K<; =15.0;GMo = 2.68;
Jxx =12.2 ;9u/B=0, 348;c.>., = 3. 9 ;T., = 1.61;
CB = 0.56Cp = 0.63Cwp= 0.80C = 0.88M:!o= 7.5 crnKMo=17.68 "
S =3010 crn'Zs=22.9 crn
G.)~= 6.2 3sec-1
15.42 crn2.26 "
13 . 5 kGcrnsec'0.365
3.43 sec-11 .84 sec
7
Those parts of the model above the water weremade according to the full scale form of thehull with the forecastle, poop, deckhouse andthe bulwarks with freeing ports (photo 1).
In order to investigate the effect ofthe freeboard F on the deck wetting charac-teristics, the freeboard could be altered by40 % and 80 %, relative to the built heightF , without changing the displacement, posi-o -t~on of the centre of gravity KG or the massmoment of inertia Jxx .4.1 Regular Wave Tests
The waves genera ted in the tank were re-gular, cylindrical and having a more or lesssinusoidal profile. The waves travelled pa-rallel to the towing tank's sides.
The model was positioned beam-on to theincoming waves and was free to oscillate anddr if t .
The following values were continuouslymeasured and recorded
wave profile ~w (t) in fixed axes, infront of the model,roll ~(t) by means of a gyroscope posi-tioned inside the model,vertical z(t) and horizontal y(t) accelera-tions of the model's centre of gravity, bymeans of accelerometers fixed inside thehull, near to the c.g.)water oscillations on the sides at midships( hN(t) and hz(t)), by means of a probemounted on each side J
mean drift speed.
The test program included measurementsfor both values of KG and for all three free-board heights Fo' F1 and F2 .
The wave parameters included both theroll resonance frequency as well as the heaveresonance frequency, in the range of steep-nessesh/A
'"1/10 + 1/60 .
The ratio of wave amplitudes to the free-board height was from ro/F
'"0.8 +,2,8 for
Fo to r IF'= 0.5 ~ 1.5 for F2 . W~th the bul-wark ing~uded this was: ro/F = 0.3 ~ 1.1 for(Fo + FN) and ro/F
'"0.25 + 0.8 for (F2 + FN)'
Therefore, the program practically in-cluded all the parameters which govern deckwetting.
The R.A.O. 's determined from these mea-surements for roll, heave and water oscilla-tions on the ship's side were plotted aspoints on fig. 8 ~ 13.
4.2 Model Tests in Natural Irregular Wavesand Wind
The tests were carried out at the re-search station by the lake Jeziorak.
The same model was used with the sameinstrumentation as in the tank tests.
The measurements were taken from self-propelled catamaran, specially adapted forseakeeping experiments.
The electrical generators, recorders andexperimenters were located on the catamaran.
The model was able to drift freely beam-on to the main direction of incoming waves,
--- - -- -- -.- -
8
in an undisturbed region of waves. The modelcould move in waves in six degrees of free-dorn and the signals from the measuring devi-ces were carried to the catamaran by looselyhang~ng cables (photo 1). The model motionsand water level oscillations on its sideswere measured identically as in the regularwave tests.
Moreover, the mean V and instantaneousVw(t) wind velocities wer~ measured at aheight -1.2 m above the water level.
Measurements were carried out for vari-ous intensities of irregular waves motionsuch,that the ratio of the significant waveampl~tuge to the freeboard height lay in therange: hb/2F =1.12 + 3.28, or including thebulwark neight: h~ /2(F+FN) = 0.49 + 1.19 .
The durat~on of each individual measure-ment was long enough to be able to determinethe statistical characteristics of the pro-cesses be~ng measured (duration of measure-ment approx. 12 minutes, on average over 400rolls of the model). However, 'the measure-ments were short enough for the recorded ran-dom functions to be stationary.
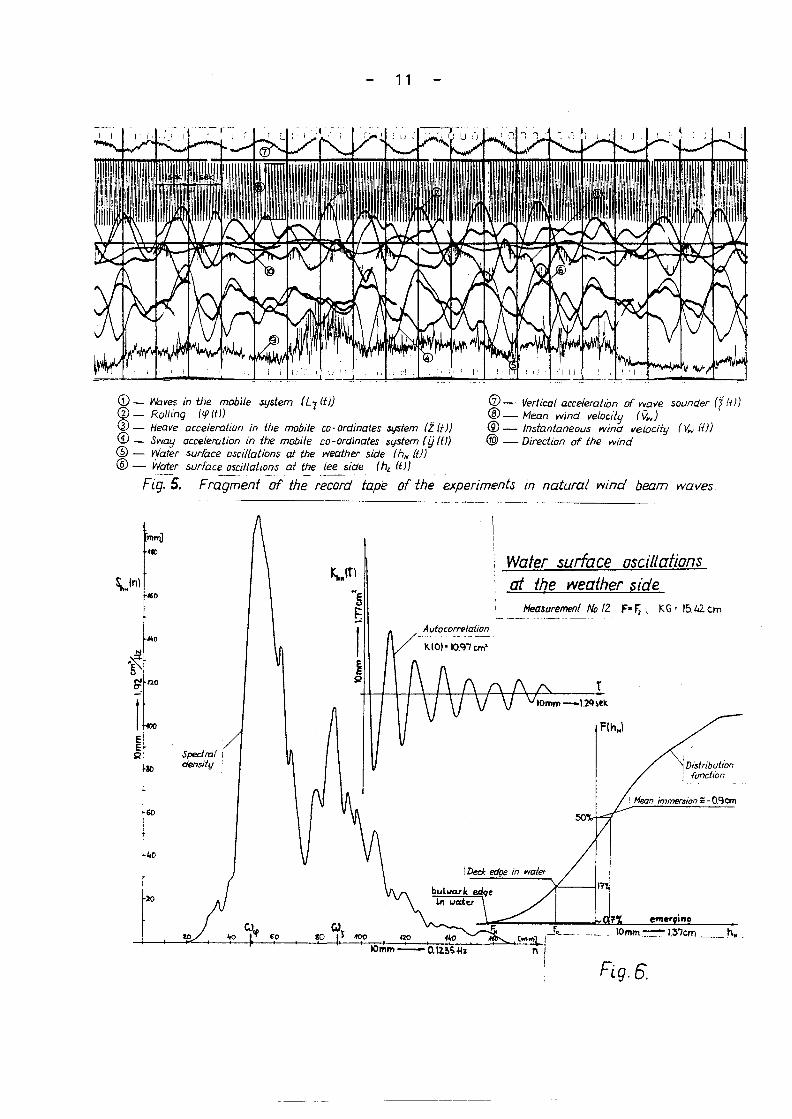
An example of the recorded signals isgiven on fig. 5 .
The spectral analysis and statisticalanalysis of the random processes was carriedout by the analogue machine ISAC-NORATOM.As a result the following characteristicswere obtained for every measured process "u"
auto-correlation function K (T),spectral density function SU(n), wheren =c;>1TI
udistribution function of the instantaneousvalues F (u) .
An example of the results obtained fromthe analog machine is shown in fig. 6 ., On the basis of these results the follow-~ng was obtained:
the variance of the process, as the valueof the auto-correlation function for ~ = 0:Du = Ku (0)
,
the variance of the rate of change of theprocess, from the spectral density distri-bution: Dü = r.",'S,,«(.))dr..l ,mean values and the probabilities of ex-ceeding certain values of a process
- di-rectly from the distribution of instantane-ous values.
,On the basis of the obtained speetraldens~t~es, the R.A.O. 's was determined fromthe relation :
Ou((,J)=1t..~' (54)
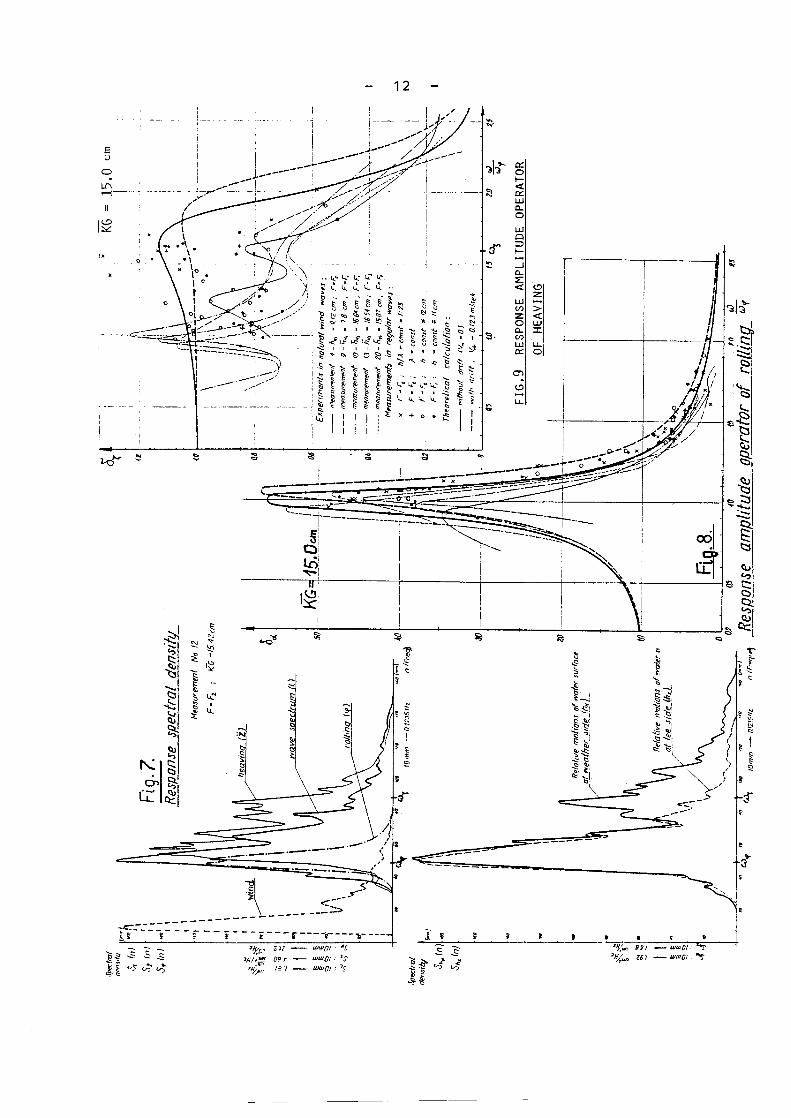
, The roll and heave R.A70. 's obtained byth~s method are shown as thin lines on fig.8',9, and the sl::}p'sside water level oscil-
lat~ons for both KG values - on figs. 10 + 13., , Moreover fig.7 shows the speetral den-
s~t~es of the measured quantities for the pur-pose of comparing the common relationship be-tween them.
5. RESULTS OF COMPUTATIONS AND OF MODEL TESTS
An algorithm and program was preparedon the basis of the theoretical relations gi-ven in sections 2 and 3. This program com-putes the ship motions on beam seas,
- -
relative water motions on the ship's sideand the variance and statistical exceedancecharacteristics for an input wave spectrum.The wind effect is taken into account by cal-eulating the drift velocity Vdr and the sta-tic heel es.
The hydrodynamic mass coefficients mi'and Ni; were ealculated by using SCORES [lÖ].The non-l~near roll damp~ng was taken intoaecount by adding a viscous damping factorcorresponding to the mean resonance amplitu-des.
This program was used to compute trans-fer functions and relative motions for themodel used in model tests. The computationswere carried out for both positions of centreof gravity (iG = 15.0 cm and Kt = 15.42 cm);with and without drift; with and without wavedeformations; with all geometrical and load-ing parameters the same as for the model.
The computed R.A.O. 's for heave and rollfor KG = 15.0 em are shown in figs. 8, 9 .Plot ted over these are the R.A,O. 's obtainedfrom ~th regular and irregular wave tests(for KG = 15.42 the shape of the curves andagreement of results are similar).
Generally it can be said that the form-ulated equations describe the hull motions inbeam seas accurately. This gives a basis forchecking the computations of water surfacerelative motions.
The relative motion R.A.O. '5 for modeltests and numerical computations are givenon figs.10+13 for both KG positions.
The following may be noted :the comparison between results obtainedfrom the regular wave tests and those ob-tained by means of spectral analysis fromtests in natural irregular waves shows re-markably good agreement.The theoretically computed R.A.O. 's alsoagree with the measured results. The con-formity of these results is improved, parti-eularly for the lee side, by taking intoaccount wave deformations.The R.A.O. for relative motions on theweather side has two distinct maxima :one in the roll resonance region, the otherin the heave resonance region;for the lee side the R.A.O. has only onemaximum in the roll resonance region. Themagnitude of this maximum is close to thatfor the weather side. There is no secondmaximum in the short wave region. This iscaused by phase shifts of particular hullmotions components for the lee side and bythe damping out of short waves on the lee-ward side.
The difference between the characteri-sties for the weather and lee side is dis-tinetly shown on fig.7, where the wind, modelmotion and relative water motion spectra foreach side were plotted for the measurement 12.This is typical for results obtained fromthe tests.
As can be seen the greater deck wettingdanger is decidedly on the weather side. Thisis also confirmed by the fact that the wavesmove towards the hull on the windward side,thereby favouring the conditions for wettingresulting from exceedance. This is not the

9
case on the leeward side, on which the wavesmove away from the hull.
The described in section 4 program wasused to compute the variance of relative mo-tions as well as the statistical parametersof freeboard and bulwark exceedance, for allmeasurements taken during the wind wave te~.Each time the measured real wave spectrum ardreal wind speed were input to the program.The effect of wind pressure fluctuationswas not taken into account because thesewould have been low frequency oscillatinglying outside the frequencies significantfor the model (see fig. 7).
'The results of the computations withthe wave deformation included (A~'r ~O) andwithout its inclusion (A = 0), are shownwith respective results ottained from measure-ments, on table 1.
As can be seen, the variances Dh andDn are in good agreement with the real vari-ances obtained from the measurements. Lar-ger differencesoccur for some of the sta-tistical parameters of bulwark edge exceed-ance. This results from the values of theseparameters being small (the differences aremuch smaller for low values of F e.g. fora freeboard without a bulwark). In spite ofthis the results obtained are comparablewith the results of the measurements and forall practical purposes the calculation me-thod may be recognized as sufficiently ac-curate.
6. CONCLUSIONS
The theoretical considerations, numeri-cal computations and the results of modeltests carried out for medium to heavy seastates (with respect to the ship type andscale), make possible the following conclu-sions :1) The relative water motions on the sides
of a ship rolling in beam seas can bedescribed sufficiently well by lineartheory in cases where the deck wetting isnot too intensive.With regard to rolling, non-linear effectscan be accounted for by linearizationtechniques.
2) The good correlation between model testresults in deterministic i.e. regular wa-ve conditions and irregular wave test re-sults obtained by spectral analysis, in-dicates that the identification methods dlinear dynamic systems may be used for de-termining seakeeping qualities with re-spect to relative water motions on theship's sides.In other words, the transfer functions ob-tained for deterministic conditions (ei-ther experimentally in regular waves ornumerically) give a basis for predictingrelative water motions in irregular waves.
3) The application of theoretically obtainedrelative motion transfer functions to thecalculation of statistical exceedance pa-rameters, sometimes gives results differ-ing from those obtained directly from ir-regular wave model tests. The results arehowever comparable and the tendencies
-...-
shown are as those shown by the majorityof measured values. Taking into accountthe stochastic nature of the investigatedprocess and the prognostic character ofthe computed exceedance parameters, thetheoretical results can be accepted asbeing sufficiently correct for practicalpurposes.
4) The relative water surface motions on theweather side have a decidedly more inten-sive character. The magnitude of thevariance of this process is governed bythe heave 'and roll characteristics (and,of course, by the wave motion intensity).
The variance for the l~e side is con-siderably smaller because in this case onlythe region of roll resonance is the deci-sive factor.
Therefore the statistical characteri-stics of the exceedances for the weatherside can be considered as a measure of theintensity of deck wetting. The lee side, onthe other hand, is more relevant for investi-gations into the danger caused by the bulwarkand deck edge submergence. The correspondingstatistical characteristics for this sideconstitute a measure of the degree of immer-sion of the bulwark edge.Considering that :
the statistical characteristics of the ex-ceedances, such as the probability_of excee-dance PF, mean exceedanse height Äh andmean exceedance period ~ , which are inagreement with an intuitive physical inter-pretation, can be used to estimate the sea-keeping qualities of a ship with respect todeck wetting and deck edge immersion of theleeward side;the previous conclusions confirm the cor-rectness of the calculation of these para-meters, for a given sea state, by theore-rically obtained transfer functions;it is possible to develop the theoreticalmodel presented herein for the case of aship moving at any angle to the waves;there undoubtedly exists a connection be-tween deck wetting and deck edge immersion,and the danger of stability loss;
the statistical characteristics of the waterlevel exceeding the bulwark edge could betaken as one of the ship safety criteria.
The exceedance of certain maximum valuesof these parameters for certain weather con-ditions, would then be considered as endan-gering the stability of the ship.
REFERENCES
1. Dillingham, J., "Motion Studies of a Vesselwith Water on Deck". Marine Technology, Vol.18 No.l,Jan. 1981
2. Dudziak, J., "Two-Dimensional Oscillations ofCylinder with Shiplike Cross-Section". Technical Uni-versity of Gdansk, ShiD Research Inst., No. 54, 1976
3. Goda, K., Miyamoto, T., Yamamoto, Y., "A Stu-dy of Shipping Water Pressure on Deck by Two-dimen-
sional Ship Model Test". J.S.N.A. Japan, Vol. 140,Dec. 1976 and Vol. 143, June 1978
4. Grochowalski, S., "Mathematical model of deck-wetting on beam seas ane in wind" (in Polish). II ShipHydromech. Symp., Jlawa, Poland 1973. Proceedings ofSymposium, Inst.Okr. PG., public. No.41, Geansk 1973

10
5. Grochowalski, 5., "prediction of Deck-Wetting
on Beam Seas" (in polish), Ph.D.Disser., Inst.Okr.PG,
Gdansk 1975 .
6. Grochowalski, S., "Determination of the Free-
board Safeguarding Against Deck-wetting on Beam Seas"
(in Polish), Report of Inst.Okr. PG, No.362, Gdansk
1973 .7. Haskind, M.D., "Hydrodynamic Theory of Ship
Motions" (in Russian), POOl. Nauka, MOSCOW 1973 .
8. Havelock, T.H., "Forced surface-waves on
water". Phil.Mag. Vol.8 No.51, Oct. 1929.
9. Newman, J.N., "The Exciting Forces on Fixed
Bodies in waves", J. of Ship Res., Vol.11, No.1,
March 1967 .
10. Raff, A., "Program SCORES-Ship Structural
Response in Waves". Dep. of the Navy, Naval Ship Eng.
Center, Ship Structure Committee, Rep. SSC-230,
washington 1972.
11. Swiesnikov, A.A., "The Basic Methods of
Random process" (in Polish). PWN, Warsaw 1965.
12. Ochi, M.K., Bontol, W.E., "Statistics of
Prediction of Ship Performance in a Seaway". ~,Vol. 20 11/73 No. 222 and Iv/73 No. 224.
13. Boroday, J .K., Necwetaev, Ju.A., "Ship Mo-
tions in Sea Waves". (in Russian), Sudostroenye,
Leningrad 1969.
14. Torremolinos International Convention for
the Safety of Fishing Vessels, 1977.
-.........
'9.............
b)
FIG, 1 THE SHIP WITH SUBMERGED BULWARK
IN WAVES
Normal d/Siributionfund/on
N
I
F
-.- ---
~i9.2) STATISTICAL CHARACTERISTICS OF WATER
SURFACE OSCILLATION AT THE SHIP'S SIDE
0',
Ag. Z.
DETERMINATION OF THE FUNCTION OF WATER LEVEL OSCILLATIONS
AT THE SHIP'S SIDE
hr1t)
r'
Fiq.~. The wafer surface ascii/altans al fhe ship'J
side os fhe rondam process
------ ------
11
G) - I'Vaves in the mobi/e $ljstem (L7 (tJ)Ci) - Rolliny (!fItf))G)- Heave acce/era/tOn in ihe mobile co-ordinates $ystem (1. (f))o - Srvay acce/eration in /he mobile co-ordinates system (i) 10)@
- Water surfQce ascil/ations at the wea/her side {hN ({))@ - Wafer surface osci/Jations ai the lee side (hz (t))
r{g:s. FragrT1entOr the '-e~ord- tape of the experiment~ In natural wind beam waves
(2)- Vertical accelerafian of rvave saunder (flf))@- Mean rvind velocif'j (v",)@ - Instantaneous wind velocity (V", ({))@ - Direction of the rv/nd
Water surface oscillatiansat ihe weather side
Measuremenf No /2 F- F;', KG' J5A2 C.m-------
Aurocorrelafion
K(O)-IO,Q7 cm'
! Deck edge in waler
Fiq.6.
----- -.--.----
S :ii,-
-.s'" c.o
~!.::!'<>
! <::
~~I
I'"""
12
Eu
o
~--
I
I
Isz
Q
(!)
Z
><tUJ:I:
1--Ii
I

13
I !
...,
.., ~.

!- I
N'~~,
;;:; tJ':.,."
"-<I:U
~(lJ!........,
"'".,.,~
'""'"
.-i,
t::s
I
.~I'<)~-~~e!u:~c::.
- '"1-<?~
~.0::;
~""
~!(U .., I'"~~'-- I'; I';
i'?"" ""t!
~t.... c::; c::;IQ, I I :31.;-
~0'~ I~I
~~~I ""<;:: "'......
-.-:......... e~ 3t...: t::s
t:>.<;::
tu ~~~(U
1~§
~~"-~..,'"C::C::
"-<:J
~..,.
t"'J ~'"<:J
"~.~~--tc
~;~~;:,t iS ~L...""
~C)lL.'"
~li...~
~~"-."
It 11"t::J ~gb L..LlI.!...l.cLl
~n '-' S .....<:,~ t ~~-f §'......., q
~......I~ S-:;{; 't1.., ~g;
~U'-i
I..JIr)!I;
'"
\j
-.::. ~~C:: ~8~~.~ "I
c:::c::.
'"
~~IC)
"">
I....~ '~ """"---..~-.....;:
t' St> -- "
I I I 11
~c::: '"~~::r::~~~
I...
~~-!::'!;?
(l)1 ,c:J i::" ~l-t,~ 1-':: I.t::' 1-'::
~e::'= t5 I I I I \ ~~~.~
c:J t:.: ."..., ~I.!;> ~<- -t: -t:
E:: s ..... ..... .... ..... 10.S
~~~~~~Ll-Ll""0 ~!O@
~....,~-- t:.:C:: ~~'<, ~.,<-tU i::1 BJ ~~L<.,lt.
:.-:: t:..,
" ~" ~ti~t::s <::: .,
I:: ~~::, I-- <>.,I:: t ..,
""'~c::c I I I ~""'< G'"Lu I
"- I I Ic::.
2:'" '"
~!;?'"oe
"" '"CO>
'-"V
14
uJ::.::<t:..J
uJ:J:
"""Zo(/)uJ><t:~
er:<t:..J::Jc.!JuJer:er:
z
..JuJoo:;:
uJ:J:
"""

~.::E-<
1:<'5
11-'
...11::
CI> .'" 0~z
oCI>..
-,oCI>
'"
N'0CI>
'"NeU
Neo
N'0CI>
'"Neo
Neo
--00
- -00
0'
8800
-O~00- -
--:T-:TN-0--N _
'"- -00
0'\0
00
NO'
'"M
00
00
- N
\O-:T
00 .....
'"
.....00
NN
N.....ON
'"-:T
0' 00
00
. .,.,. ...,;; ...
1<1<
I:>00U CI>
'"'
'" '"U.....
-o
-o
0'ooo
N
-
-
-
-o
.....-:Too
-M
00.....
~
'"-:TON- -
00
0000
0-8800
0-00
\0 N
M -\0 CO
OCO-:TO'-:T-NM
00
-:T CO-:TN- -00
MN00
OO-:T
00
00
O-:T
N _
'"M
0' -:TONN N
00
H '1L
.. ...,.; ...
1<1<
I;:100o CI>
'"'
'"..U.....
VIo
o
oo
-8o-o
.....
.....
N.....
o00--oN
o
-oo
--N
00NN
N0'\0NN
00
- -00
-:T'"0'
"'NNN
- -VlN- -NN
MNO'N _
00
MOO
VI M
- -00
OVI0
NN
00\0VlN-:T .....
- .....N -
00
H ...
.. .....i" ~ .u
1<1< c::CI>e....
'"~><W
öN
0'.....N
o
00oN
oo0'N
-:T
00NM
N
-
-0'MN
ooN
-oo~- .,
-
O'N 00M ---VI COVlNNN
00
""VI
N -
""00
0' \000
00
- .....
-
0' .....M MVI CO
OCO
-
- -00""M-NN00
-0MN
0'''''NO'-000
""NN
""\0
00 NMOM M
--
00. .,.
...... ..
1<1<
I:>00o CI>
'"'
'"..U.....
oN
15
N
'"-COVIN
o
oN-oM
.....
-
CO--VI'"-VI-NooN
.....o-o.....
M- -
M0'NM
-
N.....CO\00.....N-
NM0.....MN00
MN0\0N -00
""VI
OMMN
VI .....
CON0'\0NN
- -VI-VI
'""'-N N
'"""N N
00
- \0",,0'N-00
""0N VIMN
N
VI VIM 00
'" ""
-MCO-"'0""0N N
00
H ....
...-,;; ..1<1<
I:>00o CI>'"'.. ..U.....
-0000N
o
.....
.....
-o
N.....N
-
-""NN
oVI
N
-o--N.....
VI.....
.....
-
.
Q)
'0..-i11)
Q)Q)
~
Eit)
N.:::r.LJ"'\;
11
I~
8:e0-00
8~0000
0000
88 800 000 0
00 000 0
VI00 0'0' 0 MON -
- ---00
--00
Related Documents
![SCHRIFTENREIHE SCHIFFBAU - TUHH · 2020. 7. 28. · tuts für Schiffbau hat Baumann entwickelt und in einem Vortrag vor der Schiffbautechnischen Ge-sellschaft darÜber berichtet [36].](https://static.cupdf.com/doc/110x72/60c83fa5e2ab4f5a7c0673d3/schriftenreihe-schiffbau-tuhh-2020-7-28-tuts-fr-schiffbau-hat-baumann-entwickelt.jpg)










