Scalable Gaussian Process Methods James Hensman Oxford, February 2015

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Scalable Gaussian Process Methods
James Hensman
Oxford, February 2015

Joint work with
Nicolo FusiAlex
Matthews
NeilLawrence
ZoubinGhahramani

Overview
Background: Gaussian processes
Sparse Gaussian Processes
Stochastic Variational Inference
Gaussian Likelihoods
Non-Gaussian likelihoods
Bonus: Deep GPs
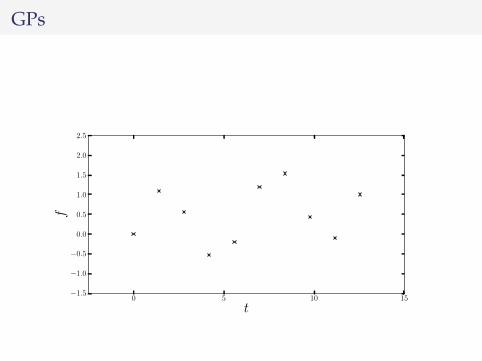
GPs
0 5 10 15
t−1.5
−1.0
−0.5
0.0
0.5
1.0
1.5
2.0
2.5
f
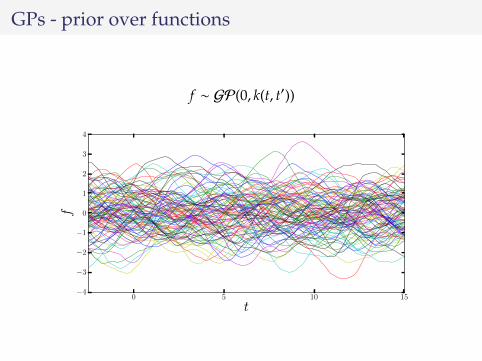
GPs - prior over functions
f ∼ GP(0, k(t, t′))
0 5 10 15
t−4
−3
−2
−1
0
1
2
3
4
f
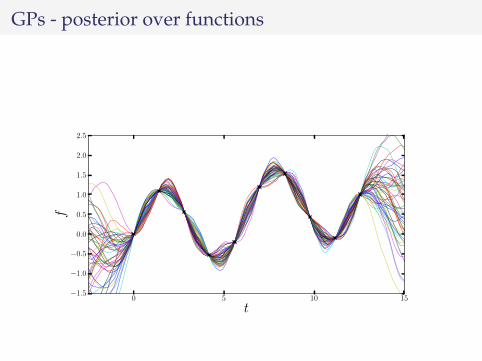
GPs - posterior over functions
0 5 10 15
t−1.5
−1.0
−0.5
0.0
0.5
1.0
1.5
2.0
2.5
f

GPs - analytical solution
f |y ∼ GP(k(x, x)K−1y, k(x, x′) − k(x, x)K−1k(x, x′)
)
0 5 10 15
t−1.5
−1.0
−0.5
0.0
0.5
1.0
1.5
2.0
2.5
f
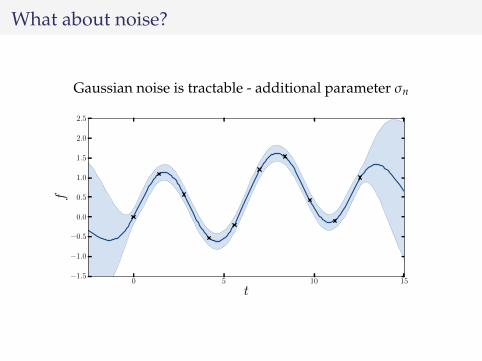
What about noise?
Gaussian noise is tractable - additional parameter σn
0 5 10 15
t−1.5
−1.0
−0.5
0.0
0.5
1.0
1.5
2.0
2.5
f

Parameters
−4−3−2−1
01234
−4−3−2−1
01234
0 5 10 15−4−3−2−1
01234
0 5 10 15

Overview
Background: Gaussian processes
Sparse Gaussian Processes
Stochastic Variational Inference
Gaussian Likelihoods
Non-Gaussian likelihoods
Bonus: Deep GPs
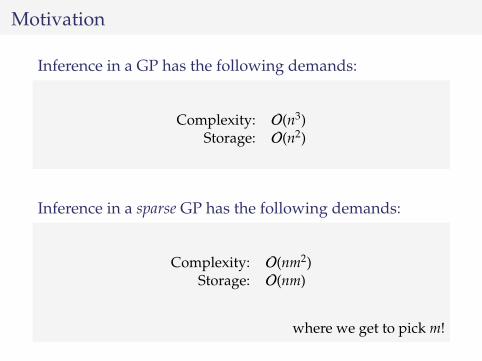
Motivation
Inference in a GP has the following demands:
Complexity: O(n3)Storage: O(n2)
Inference in a sparse GP has the following demands:
Complexity: O(nm2)Storage: O(nm)
where we get to pick m!

Still not good enough!
Big Data
I In parametric models, stochastic optimisation is used.I This allows for application to Big Data.
This work
I Show how to use Stochastic Variational Inference in GPsI Stochastic optimisation scheme: each step requires O(m3)

Overview
Background: Gaussian processes
Sparse Gaussian Processes
Stochastic Variational Inference
Gaussian Likelihoods
Non-Gaussian likelihoods
Bonus: Deep GPs

Incomplete bibliography
(With apologies for 27,000 omissions)
I Csato and Opper, 2002I Seeger 2003, Lawrence and Seeger 2003I Snelson and Ghahramani 2006I Quinonero-Candela and Rasmussen 2005I Titsias 2009I Alvarez and Lawrence 2011

Computational savings
Knn ≈ Qnn = KnmK−1mmKmn
Instead of inverting Knn, we make a low rank (or Nystrom)approximation, and invert Kmm instead.

Information capture
Everything we want to do with a GP involvesmarginalising f
I PredictionsI Marginal likelihoodI Estimating covariance parameters
The posterior of f is the central object. This means invertingKnn.
X, y
input space (X)
function v
alues

X, y
f (x) ∼ GP
input space (X)
function v
alues
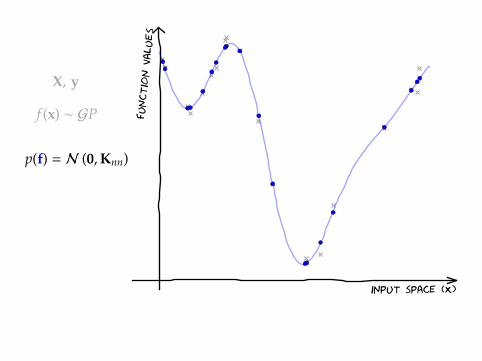
X, y
f (x) ∼ GP
p(f) = N (0,Knn)
input space (X)
function v
alues

X, y
f (x) ∼ GP
p(f) = N (0,Knn)
p(f |y,X)
input space (X)
function v
alues
Introducing u
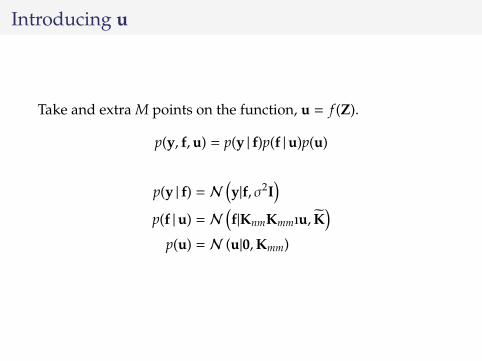
Take and extra M points on the function, u = f (Z).
p(y, f,u) = p(y | f)p(f |u)p(u)

Introducing u
Introducing u
Take and extra M points on the function, u = f (Z).
p(y, f,u) = p(y | f)p(f |u)p(u)
p(y | f) = N(y|f, σ2I
)p(f |u) = N
(f|KnmKmmıu, K
)p(u) = N (u|0,Kmm)
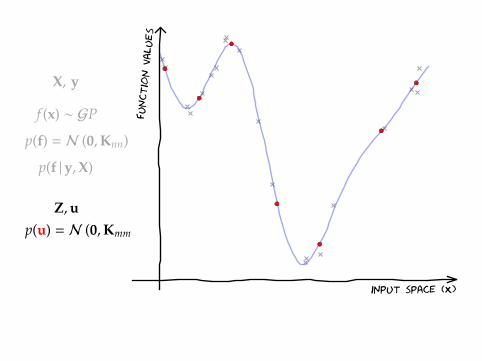
X, y
f (x) ∼ GP
p(f) = N (0,Knn)
p(f |y,X)
Z,up(u) = N (0,Kmm)
input space (X)
function v
alues
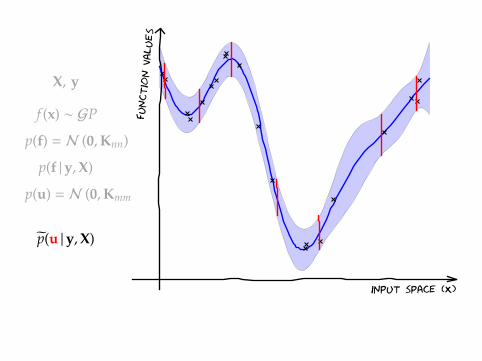
X, y
f (x) ∼ GP
p(f) = N (0,Knn)
p(f |y,X)
p(u) = N (0,Kmm)
p(u |y,X)
input space (X)
function v
alues
The alternative posterior
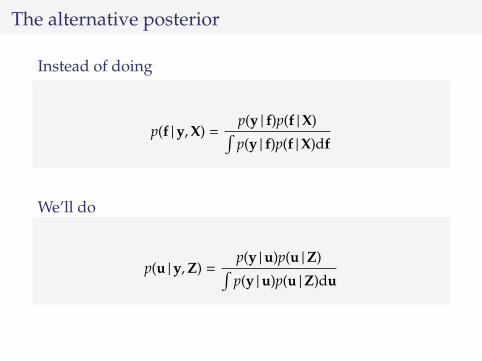
Instead of doing
p(f |y,X) =p(y | f)p(f |X)∫p(y | f)p(f |X)df
We’ll do
p(u |y,Z) =p(y |u)p(u |Z)∫p(y |u)p(u |Z)du
but p(y |u) involves inverting Knn
The alternative posterior
Instead of doing
p(f |y,X) =p(y | f)p(f |X)∫p(y | f)p(f |X)df
We’ll do
p(u |y,Z) =p(y |u)p(u |Z)∫p(y |u)p(u |Z)du
but p(y |u) involves inverting Knn

Variational marginalisation of f
p(y |u) =p(y | f)p(f |u)
p(f |y,u)
ln p(y |u) = ln p(y | f) + lnp(f |u)
p(f |y,u)
ln p(y |u) = Ep(f |u)
[ln p(y | f)
]+ Ep(f |u)
[ln
p(f |u)p(f |y,u)
]ln p(y |u) = ln p(y |u) + KL[p(f|u)||p(f |y,u)]
No inversion of Knn required
Variational marginalisation of f
p(y |u) =p(y | f)p(f |u)
p(f |y,u)
ln p(y |u) = ln p(y | f) + lnp(f |u)
p(f |y,u)
ln p(y |u) = Ep(f |u)
[ln p(y | f)
]+ Ep(f |u)
[ln
p(f |u)p(f |y,u)
]ln p(y |u) = ln p(y |u) + KL[p(f|u)||p(f |y,u)]
No inversion of Knn required
Variational marginalisation of f
p(y |u) =p(y | f)p(f |u)
p(f |y,u)
ln p(y |u) = ln p(y | f) + lnp(f |u)
p(f |y,u)
ln p(y |u) = Ep(f |u)
[ln p(y | f)
]+ Ep(f |u)
[ln
p(f |u)p(f |y,u)
]
ln p(y |u) = ln p(y |u) + KL[p(f|u)||p(f |y,u)]
No inversion of Knn required
Variational marginalisation of f
p(y |u) =p(y | f)p(f |u)
p(f |y,u)
ln p(y |u) = ln p(y | f) + lnp(f |u)
p(f |y,u)
ln p(y |u) = Ep(f |u)
[ln p(y | f)
]+ Ep(f |u)
[ln
p(f |u)p(f |y,u)
]ln p(y |u) = ln p(y |u) + KL[p(f|u)||p(f |y,u)]
No inversion of Knn required

An approximate likelihood
p(y |u) =n∏
i=1
N
(yi|k>mnK−1
mmu, σ2)
exp{−
12σ2
(knn − k>mnK−1
mmkmn)}
A straightforward likelihood approximation, and a penaltyterm
Now we can marginalise u
p(u |y,Z) =p(y |u)p(u |Z)∫p(y |u)p(u |Z)du
I Computing the (approximate) posterior costs O(nm2)I We also get a lower bound of the marginal likelihoodI This is the standard variational sparse GP (?).
Overview
Background: Gaussian processes
Sparse Gaussian Processes
Stochastic Variational Inference
Gaussian Likelihoods
Non-Gaussian likelihoods
Bonus: Deep GPs
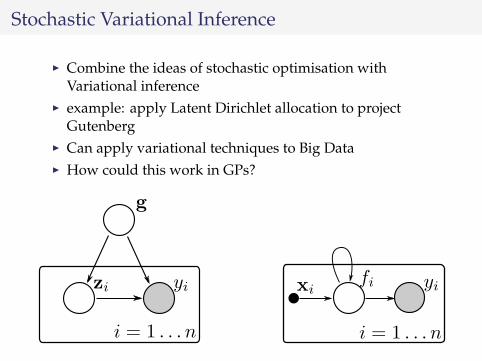
Stochastic Variational Inference
I Combine the ideas of stochastic optimisation withVariational inference
I example: apply Latent Dirichlet allocation to projectGutenberg
I Can apply variational techniques to Big DataI How could this work in GPs?
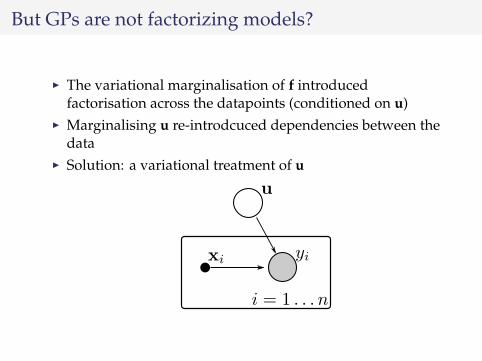
But GPs are not factorizing models?
I The variational marginalisation of f introducedfactorisation across the datapoints (conditioned on u)
I Marginalising u re-introdcuced dependencies between thedata
I Solution: a variational treatment of u
Variational Bayes
p(u |y) =p(y |u)p(u)
p(y)
p(y) =p(y |u)p(u)
p(u |y)
ln p(y) = lnp(y |u)p(u)
q(u)+ ln
q(u)p(u |y)
ln p(y) = Eq(u)
[ln
p(y |u)p(u)q(u)
]+ Eq(u)
[ln
q(u)p(u |y)
]ln p(y) = L + KL
(q(u) ‖ p(u |y)
)
Variational Bayes
p(u |y) =p(y |u)p(u)
p(y)
p(y) =p(y |u)p(u)
p(u |y)
ln p(y) = lnp(y |u)p(u)
q(u)+ ln
q(u)p(u |y)
ln p(y) = Eq(u)
[ln
p(y |u)p(u)q(u)
]+ Eq(u)
[ln
q(u)p(u |y)
]ln p(y) = L + KL
(q(u) ‖ p(u |y)
)

Variational Bayes
p(u |y) =p(y |u)p(u)
p(y)
p(y) =p(y |u)p(u)
p(u |y)
ln p(y) = lnp(y |u)p(u)
q(u)+ ln
q(u)p(u |y)
ln p(y) = Eq(u)
[ln
p(y |u)p(u)q(u)
]+ Eq(u)
[ln
q(u)p(u |y)
]ln p(y) = L + KL
(q(u) ‖ p(u |y)
)
Variational Bayes
p(u |y) =p(y |u)p(u)
p(y)
p(y) =p(y |u)p(u)
p(u |y)
ln p(y) = lnp(y |u)p(u)
q(u)+ ln
q(u)p(u |y)
ln p(y) = Eq(u)
[ln
p(y |u)p(u)q(u)
]+ Eq(u)
[ln
q(u)p(u |y)
]
ln p(y) = L + KL(q(u) ‖ p(u |y)
)
Variational Bayes
p(u |y) =p(y |u)p(u)
p(y)
p(y) =p(y |u)p(u)
p(u |y)
ln p(y) = lnp(y |u)p(u)
q(u)+ ln
q(u)p(u |y)
ln p(y) = Eq(u)
[ln
p(y |u)p(u)q(u)
]+ Eq(u)
[ln
q(u)p(u |y)
]ln p(y) = L + KL
(q(u) ‖ p(u |y)
)
The objective
L = Eq(f)[log p(y | f)] − KL(q(u) ‖ p(u)
)I Tractable for Gaussian likelihoodsI Numerical integration (1D) for intractable likelihoods
(classification)

Optimisation
The variational objective L3 is a function of
I the parameters of the covariance functionI the parameters of q(u)I the inducing inputs, Z
Original strategy: set Z. Take the data in small minibatches,take stochastic gradient steps in the covariance functionparameters, stochastic natural gradient steps in the parametersof q(u).
New strategy: represent S as LL> (unconstrained). Throwm,L,Z,θ at Adagrad.

Optimisation
The variational objective L3 is a function of
I the parameters of the covariance functionI the parameters of q(u)I the inducing inputs, Z
Original strategy: set Z. Take the data in small minibatches,take stochastic gradient steps in the covariance functionparameters, stochastic natural gradient steps in the parametersof q(u).New strategy: represent S as LL> (unconstrained). Throwm,L,Z,θ at Adagrad.

Overview
Background: Gaussian processes
Sparse Gaussian Processes
Stochastic Variational Inference
Gaussian Likelihoods
Non-Gaussian likelihoods
Bonus: Deep GPs

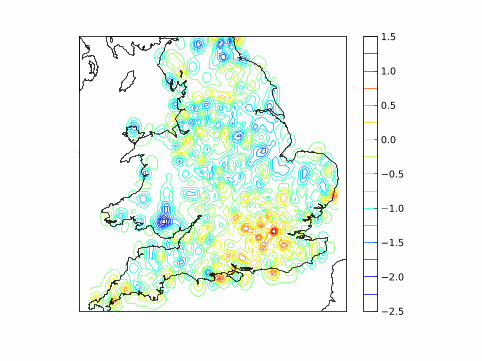
UK apartment prices
I Monthly price paid data for February to October 2012(England and Wales)
I from http://data.gov.uk/dataset/land-registry-monthly-price-paid-data/
I 75,000 entriesI Cross referenced against a postcode database to get
lattitude and longitudeI Regressed the normalised logarithm of the apartment
prices


Airline data
I Flight delays for everycommercial flight in theUSA from January to April2008.
I Average delay was 30minutes.
I We randomly selected800,000 datapoints (wehave limited memory!)
I 700,000 train, 100,000 test
Month
DayOfM
onth
DayOfW
eek
DepTim
e
ArrTim
e
AirTim
e
Distan
ce
PlaneA
ge0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Invers
e length
scale
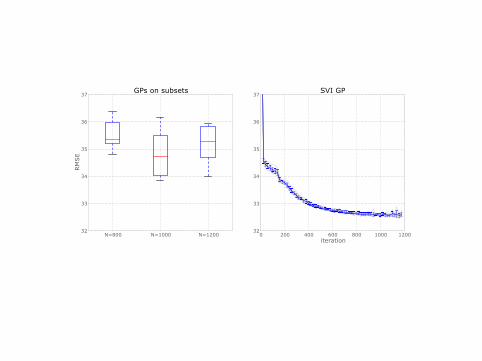
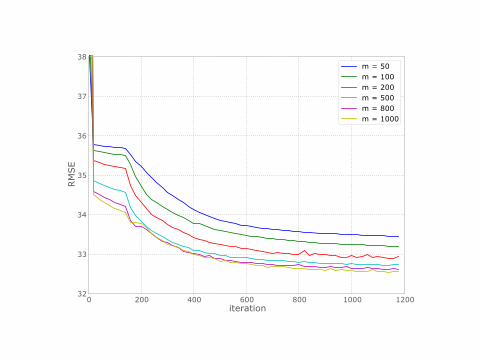
N=800 N=1000 N=120032
33
34
35
36
37
RM
SE
GPs on subsets
0 200 400 600 800 1000 1200iteration
32
33
34
35
36
37SVI GP
Overview
Background: Gaussian processes
Sparse Gaussian Processes
Stochastic Variational Inference
Gaussian Likelihoods
Non-Gaussian likelihoods
Bonus: Deep GPs

What about Classification?
I Some of the above integrals are intractable, because of thenon-Gaussian likelihood
I Since the likelihood factorizes, we need to do None-dimension integrals
I Gauss-hermite quadrature works well! For derivatives alsoI Paper in AISTATS 2015
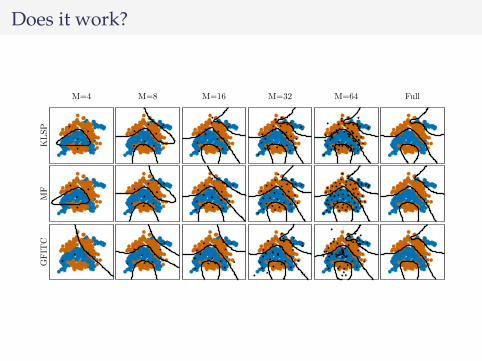
Does it work?KLSP
M=4 M=8 M=16 M=32 M=64 Full
MF
GFIT
C
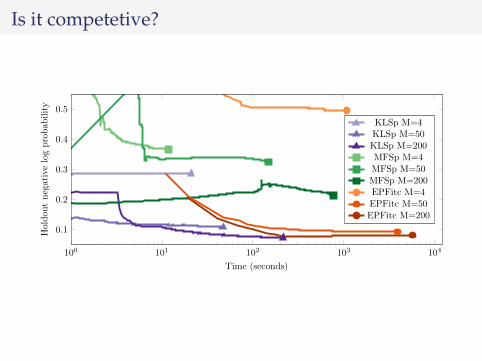
Is it competetive?
100 101 102 103 104
0.1
0.2
0.3
0.4
0.5
Time (seconds)
Holdou
tnegativelogprobab
ility
KLSp M=4KLSp M=50KLSp M=200MFSp M=4MFSp M=50MFSp M=200EPFitc M=4EPFitc M=50EPFitc M=200

Big data?
102 103 104 1050.320.340.360.380.4
error(%
)
102 103 104 1050.6
0.62
0.64
0.66
Time (seconds)
-log
p(y)
Overview
Background: Gaussian processes
Sparse Gaussian Processes
Stochastic Variational Inference
Gaussian Likelihoods
Non-Gaussian likelihoods
Bonus: Deep GPs
Bonus! Deep GPs
Deep models using compound functions:
y = f1( f2(... fn(x)))
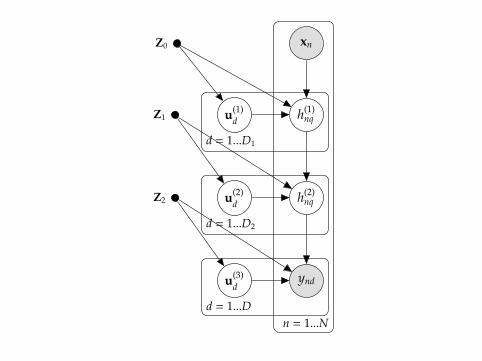
xn
h(1)nqu(1)
d
Z0
Z1
h(2)nqu(2)
dZ2
yndu(3)d
d = 1...D1
d = 1...D2
d = 1...Dn = 1...N
000001002003004005006007008009010011012013014015016017018019020021022023024025026027028029030031032033034035036037038039040041042043044045046047048049050051052053054
055056057058059060061062063064065066067068069070071072073074075076077078079080081082083084085086087088089090091092093094095096097098099100101102103104105106107108109
0
0.5
1
000001002003004005006007008009010011012013014015016017018019020021022023024025026027028029030031032033034035036037038039040041042043044045046047048049050051052053054
055056057058059060061062063064065066067068069070071072073074075076077078079080081082083084085086087088089090091092093094095096097098099100101102103104105106107108109
0
0.5
1
000001002003004005006007008009010011012013014015016017018019020021022023024025026027028029030031032033034035036037038039040041042043044045046047048049050051052053054
055056057058059060061062063064065066067068069070071072073074075076077078079080081082083084085086087088089090091092093094095096097098099100101102103104105106107108109
0
0.5
1
000001002003004005006007008009010011012013014015016017018019020021022023024025026027028029030031032033034035036037038039040041042043044045046047048049050051052053054
055056057058059060061062063064065066067068069070071072073074075076077078079080081082083084085086087088089090091092093094095096097098099100101102103104105106107108109
−1 −0.5 0 0.5 1 1.5 2
0
0.5
1
0 5 10 15 20 25 300
5
10
15
20
25
30
35
40
45
0.0 0.2 0.4 0.6 0.8 1.0
1.0
0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
1.1 1.0 0.9 0.8 0.7 0.6 0.5 0.430
20
10
0
10
20
30
40
50
60

25 20 15 10 5 0 5 10 15 2030
20
10
0
10
20
30
Related Documents











