Viscosity Dependence of Eukaryotic Flagella Waveforms Samuel Goldberg Martin A. Fischer School of Physics Brandeis University April 30, 2014 Abstract This thesis aims to describe the impact of increasing viscosity on the flagellar beat- ing in swimming cells. Because of their mechanical complexity, it is difficult to study the motor activation in flagella directly. Nonetheless recent approaches based on me- chanics of simple beams and actuators have derived tractable theoretical expressions which depend on a number of measurable parameters. Thus, we take this approach in this thesis; by varying these parameters and measuring their effect on the kinematics of the beating waveform we can decisively test the mechanisms. In particular we focus on the impact of viscosity on the kinematics of the beating waveform for the first time. Specifically, we use singular value decomposition and Fourier series to characterize the basis functions of the waveforms. We conclude by extracting, through a theoretical ap- proximation, the pattern and force of motor activation along the filament and outlining some efficiency characteristics of the sperm flagellum. 1 1 I would like to thank Dan Chen especially for providing me with the data for this thesis and guiding me through the entire analyzing and writing process. I would not have been able to succeed without him. I would also like to thank Zvonomir Dogic, Mark Zachary, Ed Barry and the rest of the Dogic Lab 1

SamThesis_5-7DC
Jan 22, 2016
Sam's Thesis
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Viscosity Dependence of Eukaryotic Flagella Waveforms
Samuel Goldberg
Martin A. Fischer School of Physics
Brandeis University
April 30, 2014
Abstract
This thesis aims to describe the impact of increasing viscosity on the flagellar beat-
ing in swimming cells. Because of their mechanical complexity, it is difficult to study
the motor activation in flagella directly. Nonetheless recent approaches based on me-
chanics of simple beams and actuators have derived tractable theoretical expressions
which depend on a number of measurable parameters. Thus, we take this approach in
this thesis; by varying these parameters and measuring their effect on the kinematics
of the beating waveform we can decisively test the mechanisms. In particular we focus
on the impact of viscosity on the kinematics of the beating waveform for the first time.
Specifically, we use singular value decomposition and Fourier series to characterize the
basis functions of the waveforms. We conclude by extracting, through a theoretical ap-
proximation, the pattern and force of motor activation along the filament and outlining
some efficiency characteristics of the sperm flagellum.
1
1I would like to thank Dan Chen especially for providing me with the data for this thesis and guidingme through the entire analyzing and writing process. I would not have been able to succeed without him.I would also like to thank Zvonomir Dogic, Mark Zachary, Ed Barry and the rest of the Dogic Lab
1

Contents
1 Introduction 5
2 Flagella Structure 6
2.1 The Axoneme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Motor Control Mechanisms . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.1 Geometric Clutch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.2 Sliding Control Theory . . . . . . . . . . . . . . . . . . . . . . . . . 10
3 Theory 10
3.1 The Navier-Stokes Equations and Low Reynolds Numbers . . . . . . . . . . 10
3.1.1 Properties of Linearity and Time Independence . . . . . . . . . . . . 12
3.1.2 Drag Anisotropy and Resistive Force Theory . . . . . . . . . . . . . 12
3.2 The Sperm Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.1 Derivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.2 Nondimensionalization of the Sperm Equation . . . . . . . . . . . . 18
3.2.3 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4 Methods 19
4.1 Threshholding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.2 Rotation Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3 Data Extraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.3.1 Parametrization and The Tangent Angle . . . . . . . . . . . . . . . . 23
4.4 Savitzky-Golay Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.5 Fourier Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.6 Singular Value Decomposition . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2

5 Results 29
5.1 Viscosity Dependence of Waveforms . . . . . . . . . . . . . . . . . . . . . . 29
5.1.1 Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.1.2 Fourier Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.1.3 SVD results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.1.4 Forcing Dependent Viscosity . . . . . . . . . . . . . . . . . . . . . . 38
5.1.5 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6 Conclusion 42
6.1 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
List of Figures
1 A Schematic of The Structure of an Axoneme . . . . . . . . . . . . . . . . . 7
2 The Geometric Clutch Theory . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Wave Patterns and Non-Zero Average Deformation . . . . . . . . . . . . . . 13
4 Resistive Force Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5 A Model Flagella . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
6 Real-Space Parametrization . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
7 Threshold Bleaching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
8 Rotation Tracking Step 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
9 Rotation Tracking Result . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
10 Representations of the Flagellar Waveform . . . . . . . . . . . . . . . . . . . 24
11 Savitzky-Golay Filtering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
12 Singular Value Decomposition . . . . . . . . . . . . . . . . . . . . . . . . . . 28
13 Images of Our Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3

14 Fourier Fits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
15 Fourier Goodness of Fit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
16 Fourier Basis Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
17 Fourier and SVD Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . 35
18 SVD Basis Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
19 Fourier and SVD Basis Correlation Comparison . . . . . . . . . . . . . . . . 37
20 Empirical Forcing Function . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
21 Force and Efficiency at Different Viscosities . . . . . . . . . . . . . . . . . . 41
4

1 Introduction
Cell motility in viscoelastic fluids is a common area of study with examples found in
many biological processes. Different microorganisms have evolved distinct strategies for
motility. While bacteria use rotary motors with beating filaments, eukaryotic cells (or cells
containing distinct organelles) have evolved different strategies involving distributed motor
systems. These distributed motor systems are part of a larger slender filament, known as
flagella or cilia, which is used for locomotion in eukaryotic cells. In almost all environments,
flagella and cilia are operating in a viscoelastic fluid, such a mucous, and thus the study
of cell motility in such a fluid is pertinent to understanding the organelles function and
structure.
A fundamental question is how the motors along the filament collectively organize their
actuation to give rise to beating of the filament. With motors distributed along the length
of the filament, the superstructure of which is collectively known as the axoneme (see
section 2 for a detailed discussion of the axoneme), it is obvious that activation of all of
the motors would result in no movement.Thus it has been proposed that motion must
evolve from periodic and precise coordination of motor activation controlled by some sort
of mechanical feedback mechanism. The feedback mechanism for the control of motor
activation is a an area of substantial debate and research today.
Because of their mechanical complexity, it is difficult to study the motor activation
directly. Nonetheless recent approaches based on mechanics of simple beams and actuators
have derived tractable theoretical expressions which depend on a number of experimental
measurable parameters. Thus, we take this approach in this thesis; by varying these
parameters and measuring their affect on the kinematics of the beating waveform we can
decisively test the mechanisms. In particular we focus on the impact of viscosity on the
kinematics of the beating waveform for the first time.
5
danielchen
Sticky Note
mucusorganelle's structure and function

This thesis aims to describe the impact of increasing viscosity on the motor activation of
swimming cells. Specifically, we examine the beat patterns of sperm flagella’s as a function
of viscosity and use a variety of fitting techniques to quantitatively characterize changes
in the flagellar shape. We also take this opportunity to extract the force and pattern of
motor activation along the filament and examine its dependency on viscosity. We close by
outlining future work with considerations regarding optimality.
2 Flagella Structure
Cilia and flagella are the slender motile structures of eukaryotic cells and exhibit regular
beat patterns important for motion on a cellular level. Their inner structure consists of a
central microtubule cytoskeleton known as the axoneme. The axoneme is comprised of nine
doublet microtubule pairs organized around a pair of singlet microtubules. The important
elements of this structure are illustrated in figure 1.
2.1 The Axoneme
Each outer doublet is linked to its neighbor by a thin protein strand called a nexin link
and has a series of projections, known as radial spokes, which act as spacers for positioning
the doublets in a circle around the central pair. These radial spokes interact with a protein
sheath enclosed around the central pair, which itself has proteins that form projections to
interact with the radial spokes. The radial spokes are anchored to each outer doublet by a
complex of protiens called the dynein regulatory complex (DRC).
Dynein has been identified as the major provider of molecular motive force of the
flagellar beat (Gibbons and Rowe, 1965). The basic movement inducing interaction is
the sliding of the microtubule doublets along each others length, caused by the action
of thousands of dynein motors in the presence of ATP. The sliding is converted into the
6

Figure 1: A schematic of the structure of an Axoneme. Structures discussed in the textare highlighted, note the beat plane is illustrated as perpendicular to the central pair.Reprinted from Lindemann, 2007
large scale bending by restraints from the nexin links (which resist the free sliding of the
microtubules) and the anchoring of the flagella to the cell body (Brokaw, 1971).
The planar beating of the flagella is most often perpendicular to the positioning of the
central pair and in most flagella doublet pairs 5 and 6 are permanently linked in order
to directly force planar beating. The direction of sliding is uniform around the axoneme,
with each doublet acting on its neighboring doublets. This mechanism insinuates that the
dynein motors on one side of the axoneme tend to bend the flagella in one direction, while
those on the other side bend the flagella the opposite direction (Sale and Satir, 1977). Satir
suggests that beating is composed of alternate activation of these opposing dynein motor
7

sets (Satir, 1985), though the exact nature of this coordination is still an open question.
2.2 Motor Control Mechanisms
2.2.1 Geometric Clutch
A prominent theory of motor control is known as sliding-induced bending, or the closely
related geometric clutch theory (Lindemann and Rikmenspoel, 1972). The sliding-induced
bending hypothesis suggests that the bending pushes certain doublets together, and consid-
ering length must be conserved, it is required that the axoneme compresses in the bending
plane. If the doublets being forced together are activated, there is a leverage disadvantage
to the dyneins on one side of the flagella. The action of the advantaged group then creates
a transverse stress that pushes the doublets together, and the action is continued down
the flagella. This is contrast to the other side, in which the transverse stress pushes the
doublets farther apart, and inhibits action.
Similar to the sliding-induced bending theory, geometric clutch theory (Lindemann,
1994) suggests that dynein motors are positioned far enough apart from their binding sights
on the adjacent doublet that when a flagella is straight, they do not usually bind. Thus,
as the flagella bends, and the distance between adjacent doublets falls (due to a transverse
at the bend), the probability of binding increases and thus the number of motors walking
increases. It is important to note that both the geometric clutch theory and sliding-induced
bending theory predict the highest motor activation to take place at the bend of a flagella
and motor deactivation to occur due to a transverse force.
8

Figure 2: The geometric-clutch formation. a) Dynein motors switch off when tension fromthe active dyneins bend the flagellum and produce transverse tension in the bent region.When the force felt by the dyneins becomes too large, they separate. b) Active dynein onone side of the flagella cause compression and an opposite force on the other side of theflagella. This opposite force hinders the binding of dynein. Reprinted from Lindemann,2007.
9

2.2.2 Sliding Control Theory
Sliding control theory predicts that the force on any given point along the flagella is
proportional to that points displacement due to the action of the dynein motors on the
sliding microtubule doublet. The proportionality is defined by a dynamic stiffness element,
which accounts for both friction per unit length and stiffness per unit length. In sliding
control theory, the detachment of motors is load dependent, such that motors uncouple
from the adjacent microtubule when the displacement, and thus the force, is too great.
The process of detachment can be shown to increase in speed as load increases (Julicher
and Prost, 1997).
This simple mechanism gives rise to positive feedback; as sliding increases the load
per motor decreases, and thus rate of detachment decreases. This leads to more attached
motors and therefore a greater net force. The coordination of motor activation arises from
the antagonistic arrangements of motors, which generate opposite forces on opposite sides
of the axoneme.
3 Theory
3.1 The Navier-Stokes Equations and Low Reynolds Numbers
Low Reynolds number environments are those in which inertia is insubstantial and
fluid flows are dominated by viscous damping. This type of environment dominates at the
small length scales of microorganisms. At this scale, swimming is a completely different
system where drag must be used to create propulsion. The fluid flows of a incompressible
Newtonian fluid with density ρ and viscosity η is governed by the Navier-Stokes equations,
ρ (∂t + u · ∇)u = −∇p+ η∇2u, ∇ · u = 0 (1)
10

Given appropriate boundary conditions, we can solve for the force distribution on the
organism, by solving the Navier-Stokes equations for a given flow field u and pressure p in
the surrounding fluid. For a swimming body, the appropriate condition is such that the
velocity of the fluid at the boundary is equal to the velocity of the fluid at each point on the
surface. In this instance, the Navier-Stokes equations are simply statements of momentum
conservation.
The Reynolds number, defined in equation 2, is a dimensionless quantity which char-
acterizes the flow regime found by solving equation 1 and is discovered when one nondi-
mensionalizes the Navier-Stokes equations.
Re = ρLU/η (2)
The Reynolds number has multiple interpretations, but the classical interpretation is
that the Reynolds number is simply a ratio of inertial terms to viscous forces per volume,
and thus a low Reynolds number flow is one in which viscous forces dominate the flow.
In our case, with U ≈ 200µms−1 and L ≈ 50µm we have Re ≈ 10−2. This is a very
small Reynolds number, and thus we can approximate Re ≈ 0. In this instance, equation
1 simplifies to the Stokes equations,
−∇p+ η∇2u = 0, ∇ · u = 0 (3)
What we see is that the inertial terms of the Stokes equation drop out, leaving just the
drag terms. It is important to note that equation 3 is linear and independent of time.
11

3.1.1 Properties of Linearity and Time Independence
The linearity and time independence of equation 3 gives rise to a unique property
known as kinematic reversibility (Powers, 2008). Kinematic reversibility suggests that an
instantaneous reversing of the flow field will only change the direction the flow patterns are
occurring in. Applying this to low Reynolds number locomotion, two important properties
emerge.
The first property is that of rate independence; if the swimmer moves through surface
deformation, the distance travelled by the swimmer between surface configurations is inde-
pendent of the rate at which the surface is being deformed. In fact, the distance traveled
is solely dependent on the geometry of the deformations. The second important property
emerging from this kinematic reversibility principle is known as the scallop theorem and
touches on the surface configurations described above. Simple stated, if the sequence of
surface deformations is the same viewed forwards as viewed backwards, the swimmer will
on average not move. For a more detailed discussion of these properties, see Lauga and
Powers, 2009.
Considering these two properties, successful swimmers must exhibit non-reciprocal body
kinematics (Luaga and Powers, 2009), a condition met by the wave patterns observed in
the majority of biological motile organelles. Figure 3 illustrates this below.
3.1.2 Drag Anisotropy and Resistive Force Theory
Microorganisms take advantage of drag anisotropy in order to swim in low Reynolds
number environments. Drag anisotropy simply states that for the same applied force, the
flow field in the parallel direction will differ by some factor from that in the perpendic-
ular direction. It can be shown that the optimal strategy for taking advantage of drag
anisotropy is to use a slender body, such as a flagella or cilia, where the ratio f⊥/f‖ con-
12
danielchen
Sticky Note
simply stated

Figure 3: How wave patterns give rise to non-zero average deformation. The wave patterntravels to the right (solid blue lines), deforming and leading to vertical displacements of thesurrounding medium (black dashed lines and arrows) which induces flows (slim red arrows)and a net leftward motion of the filament. Reprinted from Lauga and Powers, 2009
verges to 2 (Gray and Hancock, 1955). Considering the linearity of the stokes equations,
we begin by assuming that each infinitesimal element along the filament is independent
from its neighbors such that there is no hydrodynamic coupling between segments. These
infinitesimal elements can be regarded as straight, as in figure 4. For a filament described
by its tangent vector t(s) at a distance s along the filament, and its deformation described
by the velocity field u (s, t), the local viscous drag per unit length opposing the motion of
the filament is
f = f‖ + f⊥ = −ξ‖u‖ − ξ⊥u⊥ (4)
where u‖ and u⊥ are the projections of the velocity onto the direction parallel and
perpendicular to the filament and ξ‖ and ξ⊥ are the corresponding drag coefficients. Drag
anisotropy is the essential criteria for drag-based thrust to be possible. Because propulsive
forces can be created at a right angle with respect to the local direction of motion of the
filament, the filament can take advantage of the greater force (than the force needed to
move in the direction of motion) generated by perpendicular motion, to swim. The force
diagram for an element along the filament (a flagella in this case) is depicted in figure 4.
13

Figure 4: An illustration of resistive force theory. Drag anisotropy of slender filamentsgives rise to a uneven vertical force with a non-zero horizontal component, leading to a netpositive force in the horizontal and thus motion. Reprinted from Lauga and Powers, 2009.
This idea, along with the requirement that a filament can deform in a periodic motion
and not create a non-zero time-averaged propulsion (necessary due to kinematic reversibil-
ity), allow for motion. Consider figure 4 again. We can regard any short filament as
straight and moving with velocity u at an angle θ with the local tangent. This velocity can
be projected onto its vertical and horizontal components, for which we find u‖ = u cos θ
and u⊥ = u sin θ. This, by 4 leads to f‖ = −ξ‖u cos θ and f⊥ = −ξ⊥u sin θ. In the case of
drag anisotropy, ξ‖ 6= ξ⊥ and we find that the drag per unit length on the filament includes
another component fprop, perpendicular to the direction of the local velocity,
fprop =(ξ‖ − ξ⊥
)u sin θ cos θex (5)
This leads to the non-zero time-averaged propulsion condition, in that movement in
14

only one dimension (say periodic changes of u to −u) leads to zero average force.
3.2 The Sperm Equation
The sperm equation is a fourth-order PDE that, instead of assuming a model of motor
control, attempts to characterize the general properties of internally driven filaments. The
power of this is that few assumptions are made about the structure of the filaments, rather,
we can examine the beat patterns and extract the characteristics in complete generality.
3.2.1 Derivation
In this section I will briefly outline the derivation of the sperm equation, for a further
treatment, see Camalet and Julicher, 2000.
Figure 5: A simple model of a Flagella. This model assumes that motor deactivation isload dependent. The flagella consists of two elastic filaments fixed a distance a apart andrigidly connected to a base.
Consider a model system of two elastic filaments arranged in parallel with a constant
15

ψ(s)
S
Figure 6: This figure illustrate how the sperm is parameterized for the sperm equation.
separation of a along the whole length, illustrated in figure 5. One end corresponds to the
basal end of the axoneme, the head, at which the two filaments (the axoneme) are rigidly
attached and not allowed to slide with respect to each other. Otherwise, the filaments are
free to slide. For simplicity, assume that the hydrodynamics of the surrounding fluid can
be described by ξ‖ and ξ⊥. The equations of motion are given by (Wiggins and Goldstein,
1998),
∂tr = −[(1/ξ⊥)nn+ (1/ξ‖)tt] ·dG
dr(6)
where n is the filament normal, t is the normalized tangent vector, r is the middle
line of the two filaments as a function of arc length and G is the enthalpy of the system.
Changing coordinate systems such that r = (X,Y ) and ψ is the angle between the tangent
t (illustrated in figure 6) and the x-axis we find:
∂tr = (1/ξ⊥)n(−κ∂4sψ + a∂sf + ∂sψτ) + (1/ξ‖)t(κ∂sψ∂2sψ − af∂sψ′ + ∂sτ
′) (7)
where τ is the tangential component of the force acting on the filament, κ is the bending
rigidity constant. Equation 7 can be further simplified by noting that ∂tψ = n∂tψ and we
find:
16
danielchen
Sticky Note
Define what s (the contour length ) and psi(s) (local tangent angle) in the caption

∂tψ = (1/ξ⊥)n(−κ∂4sψ + a∂2sf + ∂sψ∂sτ + τ∂2sψ) + (1/ξ‖)t(κ∂sψ∂2sψ − af∂sψ + ∂sτ
′) (8)
With internal forces equal to zero, f = 0, the filament will relax to a rod such that
ψ′ = 0 we can therefore choose this state to reflect ψ = 0 or a parallelism between the
filament and the x-axis. Because of the symmetry developed from kinematic reversibility,
under transformation −f → f we see ψ → −ψ and τ → τ , and thus τ is equal to a constant
we call σ. Considering ψ′ = 0 and τ = σ we find:
ξ⊥∂tψ = −κ∂4sψ + σ∂2sψ + a∂2sf (9)
The final step in our derivation is to consider the boundary conditions of a swimming
sperm. In this case there are no external torques to the system and the only external force
is due to drag, thus σ = 0 and we reach our version of the sperm equation (Camalet and
Julicher, 2000).
ξ⊥∂tψ (s, t) = −κ∂4sψ (s, t) + a∂2sf (s, t) (10)
It should be noted that this is the simplest version of the sperm equation with free
swimming boundary conditions, and is what we use in our analysis. Potential expansions
can be used to more accurately describe the sperms swimming behavior (Riedel, 2009).
Examples of expansions include basal sliding and elasticity and rotation constraints on the
head of the sperm.
17

3.2.2 Nondimensionalization of the Sperm Equation
In order to perform computation with the sperm equation it is useful to nondimension-
alize the equation. Noting the units of each part of the equation:
ξ⊥∂tψ(s, t), fracMassLength · Time2
−κ∂4sψ(s, t), fracMassLength · Time2
a∂2sf(s, t), fracMassLength · Time2
(11)
We then introduce the dimensionless parameters t∗ = t/(ηa4/κ), s∗ = s/l and f∗ =
f(κ/a3). Where η is viscosity in units of Pa · s and l is in units of length. Substituting
these into 10 we find:
ξ⊥ηa4
κ∂tψ(s∗, t∗) = −κl4∂4sψ(s∗, t∗) +
κl2
a2∂2sf
∗(s∗, t∗) (12)
Dividing by the coefficients of the highest order term and defining:
1
a2l2= 1 (13)
We find the coefficient:
ξ⊥ηa8
κ2(14)
This number is known as the sperm number, and its values are listed below for the
viscosity values relevant to our study.
18
danielchen
Sticky Note
Fix. Should read: Mass Length/ Time^2

Viscosity (Pa·s) Methyl Cellulose Concentration (w/v %) Sperm Number
.008 0.5 116.80
.1 1.0 1825.11
.44 1.5 35334.32
1.9 2.0 658860.87
3.2.3 Discussion
The power of equation 10 is found in its generality. Equation 10 does not take a partic-
ular stance on how the molecular motors are organized, controlled, or coupled to the fila-
ments (Camalet and Julicher, 2000). Rather, equation 10 constitutes the basic framework
into which putative control mechanisms can be propagated, generating numerical predic-
tions that can be compared against experimentally measurable quantities, thus permitting
decisive discrimination between these mechanisms. For this thesis, we will specifically solve
equation 10 for the forcing function f(s, t) and examine the properties of this forcing func-
tion in the context of some of the motor activation control mechanisms discussed in section
2.2.
4 Methods
This section will go chronologically through the major processes of the image analysis
program and describe the reason for them as well as the methods. The central compo-
nents of the algorithm include translating the image to the lab frame, removing rotation,
extracting the filament points at a sub pixel resolution, and then performing the analysis.
19
danielchen
Sticky Note
add this line: The forcing function reflects the coarse-grained dynein activity pattern that is necessary to generate the observed waveform within the context of the sperm equation.

4.1 Threshholding
The first step in retrieving the data from the images is thresholding. One of the major
challenges involved in analyzing this data is the head of the sperm. The brightness of
the head creates some unique problems in subtracting out just the flagellar movement. In
figure 7 we see how a simple threshold fails to eliminate the head without ruining the image
of the tail.
50 100 150 200 250 300 350 400
20
40
60
80
100
120
140
160
180
200
50 100 150 200 250 300 350 400
20
40
60
80
100
120
140
160
180
200
a) b)
Figure 7: A demonstration of the bleaching problem. Figure 6a shows the original filament,unthresholded, while figure 6b illustrates the bleaching due to the brightness of the headof the sperm and its impact on the analysis.
In order to correct this, we must effectively threshold the head and tail separately. We
can accomplish this by placing a black (or zero pixel value) circle over the head of the
sperm, with its center at the center of mass.
4.2 Rotation Tracking
In order to effectively observe the waveforms of the flagella, it is important to remove
any rotation from the data. One method of doing this is to use fast fourier transforms of
the sperm to track rotation from one frame to the next, as done by Bayly and Dutcher,
20

2009. This approach is not possible with our data set because of the bleaching caused by
the brightness of the head. Thus we use an inertia tensor to decompose the head of the
sperm into its principal axis of rotation, and used a dot product with the lab frame axis
to track rotation.
frame 13
Figure 8: The fully thresholded sperm. We threshold the sperm until only the brightestelements of the head are still visible, this image is from the same sperm as that in figure 7
We begin by heavily thresholding the image such that the true elliptical shape of the
sperm head is apparent, this is illustrated in figure 8. We then establish our I matrix, such
that
I =
Ixx Ixy
Iyx Iyy
(15)
We define:
Ixx = Σni=1y
2imi
Ixy = Iyx = −Σni=1xiyimi
Iyy = Σni=1x
2imi
(16)
Where mi is the ”mass” of the pixel i, which in this case is either 1 or 0 due to
21

thresholding and we are summing over the entire image such that xi and yi are simply the
pixel address. To find the principle axis of rotation, we find the eigenvectors of matrix I
in 15. Figure 9 illustrates the end results.
Figure 9: The rotation axis of the sperm. The original sperm is pictured with green rotationaxis plotted on top of the head. These axis were found using the inertia tensor discussedabove. We can see that they are perpendicular and match the major and minor axis of thesperm well. The dot product of these lines can be taken with the x and y axis of the labreference frame to extract the rotation angle.
As suggested earlier, the dot product of the eigenvectors will give us the angle of rotation
of the head with respect to the lab frame and thus we can track rotation.
4.3 Data Extraction
After deleting the head of the sperm from the image and subtracting rotation and
translation from the image we use a sub-pixel tracking routine to extract the center line of
the filament. This is done by first skeletonizing the image, a process by which the filament
22

is thresholded until only the centerline of the flagella remains. This line is then used as a
”guess” and a gaussian is fitted to the original image, around the skeletonized line, with
the intensity of the image functioning as the independent variable. The center is then
used as the point along the filament. This process is continued along the entire filament,
and yields sub-pixel resolution. For more on this algorithm, see Brangwynne, Koenderink,
Barry, Dogic, MacKintosh 2007.
4.3.1 Parametrization and The Tangent Angle
Because our sperm is approximately planar and parallel to the boundary surface, it
is convenient to characterize the two-dimensional projection of the filament in terms of a
tangent angle ψ (s, t) for each arc length position s, 0 ≤ s ≤ L where L is the length of the
flagella which we normalize such that L = 1. For a regular flagellar beat pattern, ψ (s, t)
is a periodic function of t. Figure 10 illustrates this characterization.
4.4 Savitzky-Golay Filter
After importing the data from the sub-pixel tracking routine and translating it into
length-theta space, as discussed in section 4.3.1, we are left with the somewhat noisy
representation of the flagella waveform depicted in figure 11a.
Because we must take numerical derivatives in empirically extracting the forcing func-
tion from equation 10, which amplify the noise, we use the Savitzky-Golay Filter to smooth
the data. This common digital filter fits successive sub-sets of the adjacent data points
with a low-degree polynomial by the method of linear least squares (Savitzky and Golay,
1964). Figure 11a illustrates the results of applying this filter to our data with a range of
17 and a polynomial of degree 1.
In our algorithm, we apply the filter twice, once before the first derivative is taken
23

18 20 22 24 26 28 30 32 344
6
8
10
12
14
16
0 0.2 0.4 0.6 0.8 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Normalized Length
a) b)
ψ(s
) (R
ad
ian
s)
X (μm)
Y (
μm
)
Figure 10: Representations of the Flagellar Waveform. a) The red line is the sub-pixelresolution computerized sperm waveform plotted in real space with original sperm fromwhich this data was taken depicted in the inset. b) Parameterization of the flagella interms of tangent angel and contour length. Arows show correspondence between the realspace image and the length-theta space. One can see that the flat points along the contourcorrespond to zero points in the parameterized representation.
and once before the second derivative is taken (figure 11b). The Savitzky-Golay filter has
been shown to significantly reduce the signal to noise ratio without distorting the signal
(Savitzky and Golay, 1964).
4.5 Fourier Series
The ubiquitous method for describing a waveform is to decompose it into its Fourier
modes, or fit a Fourier series to the data. Fourier series are defined such that:
24
danielchen
Sticky Note
Fix figure placement

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−3
−2
−1
0
1
2
3
Derivative of Smoothed Dataa
Derivative of Unsmoothed Data
Smoothed Derivativee
0 0.2 0.4 0.6 0.8 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Smoothed Curve
Original Data
Normalized Length
ψ(s
) (R
ad
ian
s)
Normalized Length
ψ’(
s) (
Ra
dia
ns)
a) b)
Figure 11: Savitzky-Golay Filtering. a) In blue we have the original data with the redsmoothed data plotted overtop. We can see that the Savitzky-Golay Filtering does a goodjob of maintaining the original shape of the flagella, while smoothing out noise. b) In bluewe have the first derivative of the unsmoothed data from a), we can see that it is extremelynoisy and almost incomprehensible. In red is the first derivative of the smoothed data fromfigure a), which is significantly less noisy. In black is result of applying the Savitzky-GolayFiltering to the red curve in b).
yn = a0 +n∑i=1
ai cos(nωx) + bi sin(nωx) (17)
where a0 is a constant, ω is the fundamental frequency of the signal (in our case the
waveform extracted from the sperms flagella) and n is the number of terms in the series.
With an infinite number of terms, n, Fourier series can exactly reproduce the signal, x. In
our analysis, we will compare goodness of fit for value of n ranging from one to eight. To
measure goodness of fit, we use the squared standard error, defined in equation 18.
SSE =
n∑i=1
ωi(yi − yi)2 (18)
25
danielchen
Sticky Note
should the n in the cos and sin terms be i or n_i instead?

Where ωi i the weighting function and yi is the predicted value from the fit. In this
case, values closer to 0 indicate better fits.
One major assumption in using a Fourier series is that the basis of the waveform is best
described by cosines and sines. This can introduce unnecessary error if the waveforms,
such as ours, that are not clearly sinusoidal. Therefore, it is reasonable to look for other
ways to describe the basis of our waveforms more accurately. Our solution to this problem
is presented in the next section.
4.6 Singular Value Decomposition
The final significant technique used in analyzing our data is known as singular value
decomposition, or SVD.
We can represent any curve such that:
ψ(s, t) =
N∑i=1
ai(t)Ui(s) (19)
Where Ui(s) are the spatial basis functions and the coefficients ai(t) at each time step
represent the contribution of basis function to the motion of the flagella. SVD requires
was input a sequence of time points, rather than a still image, because it does not assume
a functional form for the basis. Thus, just one time point observation would trivially
guarantee that the optimal basis is the exact image. Rather than assume a set of basis as
one does when working with Fourier modes, SVD finds the optimal set of basis functions
(Burton, 2012) and that account for the greatest amount of variability in the curve.
SVD factors an matrix M into three matrices:
Mm,n = Um,mΣm,nV∗n,n (20)
26

where Um,m are the orthonormal basis vectors, Σm,n is a diagonalized matrix of singular
values, σi,i in decreasing order, and Vn,n are the right singular vectors. Um,m and Vn,n are
both unitary matrices.
To apply this to our data, we make M a matrix populated by spatial curvature at each
time step, such that S is the number of spatial points and T is the number of time steps. M
is illustrated in Figure 12(a). Applying SVD to this matrix, Ms,t we are give the optimal
curvature basis functions in Us,s, the variability of each basis function over time in Σs,t and
the amplitudes of the basis functions in Σs,tV∗t,t. Including all S basis functions guarantees
exact reproduction of the curve.
We can now choose N (up to S) number of basis functions to efficiently represent the
curve, with the basis functions associated with the larger singular values, σ’s accounting
for the most variation of the curve. We can quantify how much of the variance of the curve
is represented using N basis functions using:
νN =
∑Nj=1 σj∑Sj=1 σi
(21)
where σi is the ith singular value or the (i, i)th entry of the Σs,t matrix. Figure 12(d)
illustrates how this variance evolves when including more and more basis functions.
27

1 2 3 4 5 6 70.4
0.5
0.6
0.7
0.8
0.9
1
ψ(s,0) ψ(s,T)
M =
S
T
M = UΣV*
U(1)U(2)U(3)
N, # of Basis Vectors
ν (N
)
Space Time
a) b)
c) d)
Figure 12: Singular Value Decomposition. a) The matrix M is populated by curvatureobservations, s, at each time steps t. b) Decomposing M with SVD yields three matriceswhich separate the kinematics into time dependent and spatial dependent functions. c)Highlights what a typical set of three basis functions look like. d) Demonstrates how 3basis functions account for 80% of the variance in the curve.
28

5 Results
5.1 Viscosity Dependence of Waveforms
5.1.1 Data
Stronglyocentrotus Purpuratus sea urchins were purchased and stored in a sea water
aquarium at 60 degrees F for ∼ 1-14 days prior to use. Gamete shedding was induced
by injection of ∼ 1 mL of 0.5M KCl into the central cavity. Dry sperm were collected
by pipette and stored on ice until used in the experiment. Typically samples were used
within ∼ 8 hours of shedding. Methyl Cellulose was added to change the viscosity. The
concentrations of Methyl Cellulose and their impact on viscosity are illustrated in the table
below:
Methyl Cellulose Concentration (w/v %) Viscosity (Pa·s)
0.5 .008
1.0 .1
1.5 .44
2.0 1.9
We used dark field microscopy to take videos of the swimming sperm. Microscopy was
done at a 55X magnification using a 100X 1.3 NA oil immersion objective with .55 demag
lens. The movies were taken with the NEO camera, at 200 frames per second using rolling
shutter mode. Figure 13 illustrates one frame from each viscosity taken using the procedure
above.
29

η = .008 Pa•s
η = 1.9 Pa •s
η = .1 Pa•s
η = .44 Pa•s
Figure 13: Pictures of The Sperm. Each picture illustrates the quality of our images, takenusing the protocol above, and the changes in waveform as viscosity increases. The slightdefect in the head of the highest viscosity sperm will be relevant for our analysis later.
5.1.2 Fourier Results
When one encounters a wave the natural first step is to fit a Fourier series to the
data and attempt to extract the relevant parameters. In our case, we are interested in
establishing how similar the flagellar waveforms are over different viscosities. A simple
first step in doing this is to examine how many terms of the Fourier series are necessary
to characterize the curve. Figure 14 shows the fitted series, for a variety of different series
lengths and for each viscosity. Qualitatively and intuitively, it is clear that as viscosity
rises, it takes a larger number of terms in the series to accurately fit the flagella.
30

0 0.2 0.4 0.6 0.8 1−1.5
−1
−0.5
0
0.5
1
1.5
0 0.2 0.4 0.6 0.8 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
0 0.2 0.4 0.6 0.8 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
0 0.2 0.4 0.6 0.8 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Normalized Length
Normalized LengthNormalized Length
Normalized Lengthψ
(s,t
) (
Rad
ian
s)
ψ(s
,t)
(R
adia
ns)
ψ(s
,t)
(R
adia
ns)
ψ(s
,t)
(R
adia
ns)
η
Flagella Waveform, 1 Term Series Fit3 Term Series Fit5 Term Series Fit
η = .008 Pa•s η = .1 Pa•s
η = .44 Pa•s η = 1.9 Pa•s
Figure 14: Fourier Fits. Above we illustrate a number of fits to the flagella waveforms, foreach viscosity, using Fourier series consisting of one, three, and five terms. Qualitatively,one can see that at higher viscosities, higher order terms are needed to accurately representthe flagella waveform.
31

We can quantify the error in fitting using the standard statistical measure of fit, squared
standard error (discussed in section 4.5). For each viscosity level, we fit Fourier series
ranging from one to eight terms and calculate the squared standard error goodness of fit
for each series. The results are illustrated in figure 15.
1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
η = 8
η = 100
η = 440
η = 1900
N (Mode Index)
Fourier Series Goodness of Fit
% M
ax S
qu
are
d S
tan
dar
d E
rro
r
Figure 15: Goodness of Fit for Various Fourier Series. The goodness of fit measurementsfor Fourier series consisting of 1 through 8 terms are plotted for each viscosity, with thenumber of terms in the series on the x axis and the % of the maximum squared standarderror (the error from a simple cosine) on the y axis. We can see that as viscosity increases,it takes more and more terms in the Fourier series to accurately capture the filament.
Just as we saw qualitatively, as viscosity increases, it takes more terms in the Fourier
series to accurately represent the data. If we take as our threshold 80% explanatory power
for a fit, we can compare these basis functions and attempt to learn something about how
these curves are similar.
Using the normalized dot product as our correlation (equation 22), such that normal
basis functions have a correlation of 0 and parallel basis have a correlation of 1, we can
examine how the basis functions correlate over different viscosity values. The results are
illustrated in figure 16.
32

rx,y =Cov(x, y)√V ar(x)V ar(y)
=x · y‖x‖‖y‖
(22)
Figure 16: Fourier Basis Comparison. The dot product is taken between basis vectors foreach viscosity, and normalized. This normalized dot product is represented in the colorindex to the right. This can be used to quantify how similar the basis are. We see that thelarger the difference in η, the less similar the basis functions are.
We see a few interesting things here. Clearly the highest correlated viscosity’s are for
η = .008 and η = .1 with η = .1 and η = .44 closely following. In fact, this trend continues,
though only slightly, such that the closest value of η has the highest correlated basis. This
seems rather obvious, considering as viscosity increases the waveform becomes less and less
similar to the waveform at previous viscosities, as illustrated in figure 13. We can also
recognize in figure 16 the degree of correlation scales with the difference in viscosity, such
that the larger the difference between viscosity the less correlated the basis function of the
curve will be.
33

5.1.3 SVD results
While using Fourier series to characterize the basis of the waveforms proved insightful,
it would be to the benefit of the comparison if the most natural basis for each waveform
were to be used. In order to compare the natural basis of each waveform, we use singular
value decomposition and repeat the analysis above.
We begin by comparing the number of basis vectors, derived from SVD, needed to
characterize 80% of the variation in the flagella to those derived from the Fourier fits. It
should be noted that though SVD does account for the time variation of the waveform
and, unlike the Fourier series does not just fit a still image, the number of basis needed to
characterize 80% of the variation does not vary with the number of time steps included.
34

2 3 4 5 6 7 82
2.5
3
3.5
4
4.5
5
5.5
6
SVD
Fourier
log(η)
# o
f B
asis
Ve
cto
rs
A Comparision of Fourier Series Fitting and SVD
Figure 17: Fourier and SVD Comparison. This figure illustrates how much more accuratelySVD can characterize the basis of the flagella waveform. We plot the number of basis neededto explain 80% of the variation in the data on the y-axis and the natural log of viscosityon the x-axis. One can see that as viscosity increases, Fourier series require more andmore terms to effectively characterize the waveform. On the other hand, SVD succeeds incharacterizing the waveform in three terms at all viscosity levels. This result indicates thatFourier series might not be the most effective basis at higher viscosities.
35

Figure 18: SVD Basis Comparison. Just as in figure 16, the normalized dot product istaken between basis vectors of each viscosity in order to quantify how similar the basisare and represented in the color bar. We see that the larger the difference in η, the lesscorrelated the basis functions and thus the curves are.
Figure 17 illustrates how much more efficient SVD is at describing the waveform than
Fourier series. We can see that it takes only three basis vectors, regardless of the waveform,
for SVD to characterize 80% of the flagella. This is in comparison to up to six terms needed
for Fourier series to do the same. Figure 17 indicates that the natural basis, especially for
the higher viscosity waveforms, is not entirely sines and cosines. Even more so, the time
evolution of the flagella is not as clearly sinusoidal as one might expect. We can use the
same definition of correlation as used for the Fourier to compare the basis vectors found
using SVD. These results are demonstrated in figure 18.
The trends illustrated in figure 18 are similar to those found in figure 16. Figure 19
further illustrates this point. Again we see that the highest correlated basis are those of
the most similar viscosity’s waveforms with the highest correlation again coming from the
η = .008 and η = .1 viscosities. There is some deviance from this pattern, most notably
36

with η = .1 and η = .44 could signify some sort of true transition in the basis of the
waveforms. Qualitatively, examining figure 21, we can see that in real space the waveform
of the flagella transitions from a function to a multivalued function. This change in form
might cause the drop in correlation between the η = .1 and η = .44 cases.
0 0.2 0.4 0.6 0.8 10.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fourier Correlations
SVD Correlations
Δη/max(η)
Bas
is C
orr
ela
tio
n
Basis Correlation Versus Di�erence in Viscosity
Figure 19: Figure 19 plots the difference in η’s in ascending order over our max η, 1.9 Pa·s,on the x-axis versus the correlation of the respective ηs on the y axis. We can see thatfor both the Fourier and SVD basis the correlation greatly decreases as the difference inviscosity increases.
How can the patterns from figure 18 and figure 16 be so similar in the context of figure
17? By construction, SVD’s first three basis functions will account for the majority of
variation in the waveform (generally about 80%) while Fourier series may take many more
terms to accurately characterize the curve. That being said, regardless of the number of
terms, both are characterizing the same data sets and thus the results should be rather
similar. We use SVD in the hopes of picking up on some of the subtler details of the
curvature that Fourier series are inefficient at characterizing.
37

5.1.4 Forcing Dependent Viscosity
We can solve the sperm equation, discussed in section 3.2, for f(s, t) and use our data
to estimate where and how force is distributed along the flagella.
f∗(s∗, t∗) =ξ⊥ηa
8
κ2
∫ ∫∂tψ(s∗, t∗)dsds+ ∂2sψ(s∗, t∗) (23)
There are some difficulties in working with the numerical integration and derivatives
needed to get f∗(s∗, t∗). As discussed in section 4.4 we use Savitsky-Golay filtering to
help smooth out the numerical derivatives and use the 3-point formula, described below,
to increase accuracy.
ψ(1)0 =
−ψ2 + 4ψ1 − 3ψ0
2(s2 − s1)(24)
For the time derivative and integration, we take the difference between the flagellar
position over frames and use the Matlab Trapz.m to integrate. Figure 20 illustrates our
results.
38

0 0.2 0.4 0.6 0.8 1−2
−1
0
1
2
0 0.2 0.4 0.6 0.8 1−2
−1
0
1
2
0 0.2 0.4 0.6 0.8 1−3
−2
−1
0
1
2
3
0 0.2 0.4 0.6 0.8 1−3
−2
−1
0
1
2
3
0 0.2 0.4 0.6 0.8 1−3
−2
−1
0
1
2
3
0 0.2 0.4 0.6 0.8 1−3
−2
−1
0
1
2
3
0 0.2 0.4 0.6 0.8 1−2
−1
0
1
2
0 0.2 0.4 0.6 0.8 1−0.4
−0.2
0
0.2
0.4
Flagella Waveform,
Forcing Function
Normalized Length
Normalized Length Normalized Length
ψ(s
,t)
(Ra
dia
ns)
ψ(s
,t)
(Ra
dia
ns)
ψ(s
,t)
(Ra
dia
ns)
η = .008 Pa·s η = .1 Pa·s
η = 1.9 Pa·sη = .44 Pa·s
Normalized Length
ψ(s
,t)
(Ra
dia
ns)
Fo
rce
(μ
N)
Fo
rce
(μ
N)
Fo
rce
(μ
N)
Fo
rce
(μ
N)
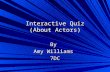
Figure 20: Forcing Function. Above we plot the flagella waveform and the empiricallyfound force at each point on the waveform for all four viscosities. We can see that asviscosity rises, the amplitude of the force increases. It is also important to note that themaximum force is occurring in the regions most perpendicular to direction of motion (inreal space).
39

A few aspects of figure 20 are quite striking. We can see for each viscosity that the
maximum force is occurring where the curvature of the flagella is greatest, and that es-
sentially no force is occurring in the bend of the flagella. Not only does it appear as if
the greatest force is occur in between bends in the flagella, but the amplitude of this force
is also increasing as the viscosity and curvature of the flagella increases, as illustrated in
figure 21b. We can then take a look at the efficiency and power of these waveforms,
defined below.
γ =Vr
2π2A2fλ
(25)
P = A2L[β
2(2πf)2 + αf(
2π
λ)4] (26)
For equation 25, Vr is the observed velocity, A is the amplitude, f is the frequency,
and λ is the wavelength. For equation 26, α is the bending stiffness of the flagellum
approximately equal to 3e-21 N·m2 and β is the resistive force theory approximation for
the transverse hydrodynamic drag per unit length. In our case, efficiency is defined as
the observed velocity over the resistive force theory prediction of velocity (Machin, 1958).
Using these definitions (Machin, 1958), figure 21a illustrates how these quantities change
with respect to viscosity. We see that with increasing viscosity, the power output increases
and the efficiency of the wave decreases. The quantities measured and used to calculate
these values are displayed in the table below. In the η = 1.9 Pa·s case we do see a drop off
in power output, which could be due to a number of factors.
40

2 3 4 5 6 7 80
0.01
0.02
2 3 4 5 6 7 80
0.5
1
E!ciency
Power
2 3 4 5 6 7 80
0.5
1
1.5
2
2.5
3
3.5
Net Force
log(η)
E
cie
ncy
Po
we
r (μ
J•s)
Comparison of Power, E ciency, and Viscosity
log(η)
Force Along The Flagella
Forc
e (
µN
)
a) b)
Figure 21: Force and Efficiency. a) We plot the natural log of viscosity on the x axis versusefficiency and power on the y axis, defined in equations 25 and 26. As viscosity increaseswe see that the energy exerted by the waveform increases and efficiency decreases. Defectsin the head of the sperm might be an explanation for the change in trend with η = 1.9Pa·s. b) We sum the absolute value of the force over the whole length of the flagella andplot it on the y axis versus the natural log of viscosity on the x axis. We see that the netforce exerted increases with viscosity as well.
η (Pa·s) Amp (µm) Velocity (µms ) λ (µm) Freq (Hz) Force (µN) γ Power (µJ · s)
.008 4.13 10.52 12.27 26 2.14 .014 .035
.1 5.31 8.78 8.41 16 12.89 .0083 .28
.44 6.01 4.34 4.83 12 30.80 .0050 .93
1.9 7.19 1.15 5.60 4 24.54 .0016 .6390
Though velocity decreases with increasing viscosity, this seems to be more a product
of the great reduction in frequency of the beating. Figure 21a indicates that though the
sperm is able to swim faster at lower viscosities, its power increases as viscosity rises. This
is interesting considering the most common biological environments for swimming sperm
have higher viscosities than water (an example includes cervical fluid, with a viscosity of
41

about 6000 Pa · s).
5.1.5 Discussion
Considering the shape of the waveform is driven by the pattern of motor activation
along the filament, the correlation of basis functions gives us some insight into how motors
are being activated at different viscosities. Both methods of characterization used seem to
point to substantial transitions in the patterns of motor activation over viscosities, with
some evidence to support fundamental changes in the basis. We can see from the figures
presented above that as the difference in viscosities increases, the similarities in the flagellar
waveforms greatly reduce. Qualitatively, figure 13 supports this finding. When examining
the force and efficiency of the waveforms, the biological purpose of sperm is evident. In
higher viscosity environments, the sperm seem to be able to exert greater force. We see that
the magnitude of force exerted scales with the viscosity and that the force is concentrated
on parts of the filament more perpendicular (though not exactly) to the direction of motion.
The location of this force is in agreement with drag anisotropy, which suggests that the
force inequalities of f⊥ and f‖ allow the sperm to swim by exerting more force on the areas
more perpendicular to the direction of motion. Another take away from the pattern of
force observed in figure 20 is its contradiction of geometric clutch theory. We see that the
force along the filament is greatest in between the bends of the flagella, while geometric
clutch theory proposes greater force at the bend.
6 Conclusion
In conclusion it seems that there is significant evidence to suggest viscosity can sig-
nificantly impact how sperm swim. In this thesis we have examined for the first time the
impact of viscosity on the waveform of the sperm and also the distribution of force along the
42
danielchen
Sticky Note
motor activation as a function of viscosity

waveform. By using two distinct characterization methods, Singular Value Decomposition
and Fourier series, we have robustly examined how the patterns of motor activation evolve
with respect to viscosity. Of substantial note, both methods point to similar transitions in
the pattern of motor activation as viscosity changes. We then begin the comparison be-
tween these characterizations and the changing in the forcing function with viscosity, and
note some of the efficiency characteristics of the waveforms. We concluded by motivating
some simple biological and physical reasons for these transitions. Another significant as-
pect to this work was the development of the analysis tools necessary for the extraction of
the data. We succeeded in implementing a system that accounts for the rotation and trans-
lation of our sperm, as well as provides sub-pixel resolution tracking to increase accuracy.
These codes and a brief discussion are in the appendix.
6.1 Future Work
An interesting continuation of this work would be to explicitly measure the ATP con-
sumption of the sperm at different viscosities, and test the efficiency of energy use. Sim-
ilarly, ATP concentration might itself impact the waveform of the flagella, and charac-
terizing this change might prove useful companion work for understanding the viscosity
data presented in this thesis. Another avenue for expansion of this work is to examine
the forcing function under more elaborate boundary conditions and models as discussed in
Riede-Kruse, 2007 and in section 3.2. In our work, we have only implemented the simplest
forms of the sperm equation. Some examples of potential expansions that can be easily in-
corporated into our framework include the stiffness of the basal body and more interesting
boundary conditions such as pinned heads. Most importantly, in previous analysis of the
sperm equation Bull sperm was used (Riedel-Kruse, 2007). Though Bull sperm did provide
some interesting results, its beat is not entirely planar (as the sperm equation assumes)
43
danielchen
Sticky Note
and determine the chemomechanical efficiency of energy use
danielchen
Sticky Note
Though Bull sperm did permit some quantitative estimates of flagellar parameters to be extracted, there remain open questions on the accuracy of these parameters in light of the fact that the bull sperm's morphology (other mammalian sperm's) is not entirely consistent with the sperm equation. In mammalian sperm the axoneme is surrounded by a sheath of dense outer fibers with a tapered thickness that decreases toward the distal end. Thus, the bending stiffness of the bull sperm's flagellum is not uniform as is assumed in the sperm equation. Sea urchin sperm, by contrast, has a uniform thickness which is in closer accord with the uniform bending stiffness that is assumed in the sperm equation. We expect that this assumption will impinge on the numerical values of the parameters that are extracted. Thus the sea urchin sperm used in this thesis may prove a more appropriate platform for testing the sperm equation thoroughly.

and thus the sea urchin sperm used in this thesis may prove more appropriate for testing
the sperm equation thoroughly.
44
danielchen
Sticky Note
Add an appendix after the references that has the names of the matlab codes in bold, as well as a brief description of what the code does. This description should include the INPUT and OUTPUT of the code and any useful notes on how the code should be run.

References
[1] Lindemann, C.B., and K. A. Lesich. Flagellar and ciliary beating: the proven and
the possible. J Cell Sci 123:519-528
[2] Brokaw, C. J. 1971. Bend propagation by a sliding filament model for flagella J Exp
Biol 55:289=304
[3] Satir, P. 1985. Switching Mechanisms in the control of ciliary motility. Mod. Cell
Biol. 4:1-46
[4] Lindemann, C.B., Rikmenspoel, R. 1972. Sperm flagella: autonomous oscilations of
the contractile system. Science 175:337-338
[5] Lindemann, C.B. 2004. Testing the geometric clutch hypothesis. Biol. Cell 96:681-690
[6] Julicher, F., J. Prost. 1997. Spontaneous oscillations of collective molecular motors.
Phys. Rev. Lett. 78:4510-3
[7] Gray, J., G.J. Hancock. 1955 The propulsion of sea-urchin spermatozoa. J. Ep. Biol.
32:802-14
[8] Wiggins, C. H., R. E. Goldstein. 1998. Flexive and propulsive dynamics of elastic at
low Reynolds number. Phys. Rev. Lett. 80:3879-82
[9] Camalet, S., and F. Julicher. 2000. Generic aspects of axonemal beating. New Journal
of Physics 2:241-2423
[10] Brangwynne, C. P., Gijsje, H. K., Barry, E., Dogic, Z., MacKintosh, F. C., D. A.
Weitz. 2007. Bending dynamics of fluctuating biopolymers probed by automated
high-resolution filament tracking. Biophysical Journal 93:346-359
45

[11] Savitzky, A., M. J. E. Golay. 1964. Smoothing and differentiation of data by simplified
least squares procedure. Anal. Chem. 36:1627-1639
[12] Riedel-Kruse, I. H., A. Hilfinger, J. Howard, and F. Julicher. 2007. How molecular
motors shape the flagella beat. HFSP J 1:192-208
[13] Fu, H. C., C. W. Wolgemuth, and T. R. Powers. 2008. Beating patters of filaments
in viscoelastic fluids. Phys Rev E Stat Nonlin Soft Matter Phys 78:041913
[14] Lauga, E., T. R. Powers. 2009. The hydrodynamics of swimming microorganisms.
Rep. Prog. Phys. 72:096601
[15] Machin, K. E. 1958. Wave Propagation Along Flagella. Journal of Experimental
Biology 35:796-806
[16] Burton, L. J. 2013. The dynamics and kinematics of bio-in swimming systems. Thesis.
[17] Maladen, R. D., Ding, Y., Umbanhowar, P. B., Kamor, A. D. I. Goldman. 2011.
Mechanical modes of sandfish locomotion reveal principles of high performance sub-
surface sand swimming. J. R. Soc. Interface 10.1098.
46
Related Documents