Sampling Strategies for Narrow Passages Presented by Irena Pashchenko CS326A, Winter 2004

Sampling Strategies for Narrow Passages Presented by Irena Pashchenko CS326A, Winter 2004.
Dec 20, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Sampling Strategies for Narrow Passages
Presented by Irena PashchenkoCS326A, Winter 2004

Motivation Two major costs of PRMs:
FREE - Check if sample point is in free space JOIN – Check if path between milestones is in free space
JOIN is 10 to 100 times slower than FREE
Idea: selectively pick milestones Try more samples (nt ) Keep fewer samples (na ) by filtering out non-promising samples
Filtering occurs before creating edges
Running time: T = nt Tt + na Ta
nt – milestones tried Tt << Ta
na – milestones added to graph
Two Similar Approaches
The Gaussian Sampling Strategy for PRMs Valerie Boor, Mark H. Overmars, A. Frank van der
Stappen ICRA 1999
The Bridge Test for Sampling Narrow Passages with PRMs
David Hsu, Tingting Jiang, John Reit, Zheng Sun ICRA 2003

Overview Gaussian Strategy
Goals Two Proposed Algorithms Experimental Results
Bridge Test Proposed Algorithm Comparison with Previous Paper Experimental Results

Goal
More samples in hard regions
Sampling density of each point = Conv (N(c, ) , Obstacles)
= more samples near obstacles

Parameters, Mixing Methods indicates how close configurations are to
obstacles
/2
s.t. most configs are at length of the robot
Hybrid strategy: mix uniform sampling w/ Gaussian

Algorithm I loop
c1 = random config. d = distance sampled from Gaussian c2 = random config. distance d from c1
if Free(c1) and !Free(c2), add c1 to graph if Free(c2) and !Free(c1), add c2 to graph
Intuition: Pick free points near blocked points Avoid adding configurations in large empty
regions
hence the name

Algorithm II Motivated by the case of convex obstacles:
Difficult places lie close to at least two obstacles
loop c1 = random config. d1,d2 = distances sampled from Gaussian c2,c3 = random configs distance d1,d2 from c1
if Free(c1) and !Free(c2) and !Free(c3), add c1
if !Free(c1) and Free(c2) and !Free(c3), add c2
if !Free(c1) and !Free(c2) and Free(c3), add c3

Narrow Passage
uniformsampling
took60 timeslongerthan
algorithm 1

Narrow Passage
uniformsampling
tookless time
thanalgorithm II

Difficult Twist
uniformsampling
took13 timeslongerthan
algorithm 1

Twisty Track
uniformsampling
took4 timeslongerthan
algorithm 1

Is Gaussian Sampling Appropriate for Finding Narrow Passages? In n-dimensional configuration space,
the obstacle boundaries still form an (n-1)-D subspace!

Overview Gaussian Strategy
Goals Two Proposed Algorithms Experimental Results
Bridge Test Proposed Algorithm Comparison with Previous Paper Experimental Results

Bridge Test loop
c1 = random config. if Free(c1), continue (restart the loop) d = distance sampled from
Gaussian c2 = random config. distance d from c1
if Free(c2), continue (restart the loop) p = midpoint(c1,c2) if Free(p), add p
c1
p c2
Bridge vs. Gaussian Paper mentions Gaussian but no
comparison Want to compare:
Expected # of calls to free (lower is better) Expected # points generated (higher better) If points can be reused in a hybrid strategy Quality of sampled points
Let p be prior probability of Free

Bridge vs. Gaussian
Strategy Calls to Free per
iter
Samples per iter
Reuse Points
Point Quality
Gaussian 1
2 2p(1-p) yes OK
Gaussian 2
3 - p2 3p(1-p)2
yes Better
Bridge 1 + (1-p) + (1-p)2
p(1-p)2 yes Best
Smallest

Clover

Two Squares
RBB SamplerGaussian Sampler

Depression, Zigzags
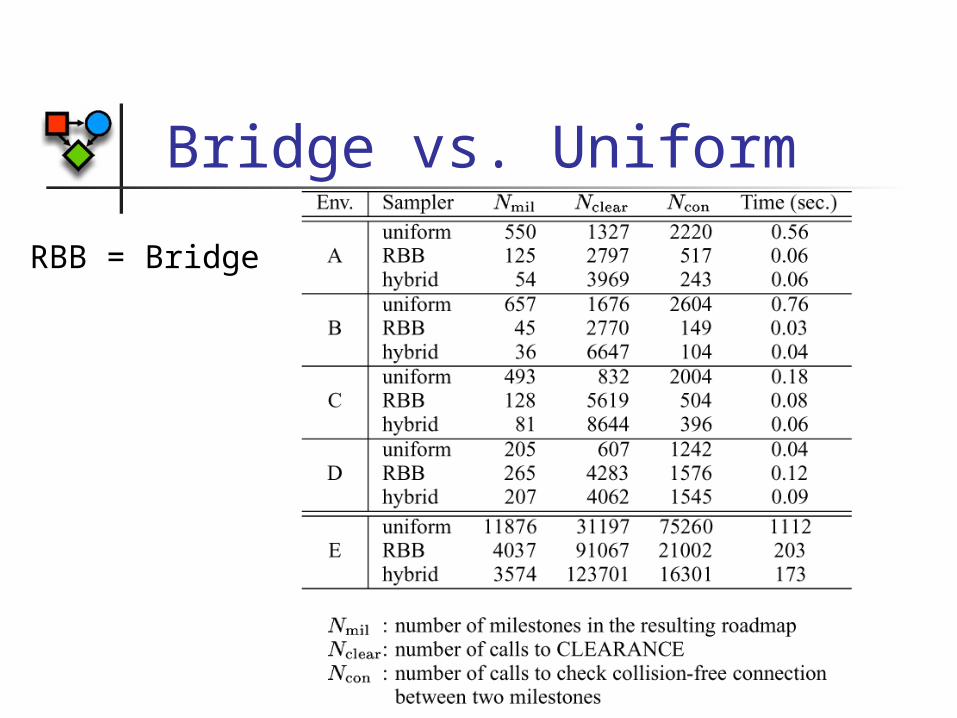
Bridge vs. Uniform
RBB = Bridge

Combined Algorithm (JCL)Loop until N milestones have been generated Pick a configuration q1 uniformly at random in C
and a configuration q2 uniformly at random in a neighborhood of q1
If q1 and q2 are both in collision then If (q1+q2)/2 is collision-free, retain it as a milestone
Else if q1 (or q2) is in collision
Then retain q2 (or q1) as a milestone with high probability p’ Else retain q1 or q2 as a milestone with low probability p
Conclusion Better configurations
= fewer configurations= less edge computations= faster running time
Gaussian Points near obstacles Points near two obstacles
Bridge Points between parts of obstacles
Still un-tested in high-dimensional spaces
Related Documents











