Departmen In nt of Applied Electron nstrumentation nics &

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Department of Applied Electronics &
Instrumentation
Department of Applied Electronics &
Instrumentation
Department of Applied Electronics &

DEPARTMENT OF APPLIED ELECTRONICS & INSTRUMENTATION
COURSE HANDOUT: S7 Page 2
RSET VISION
RSET MISSION
To evolve into a premier technological and research institution,
moulding eminent professionals with creative minds, innovative
ideas and sound practical skill, and to shape a future where
technology works for the enrichment of mankind.
To impart state-of-the-art knowledge to individuals in various
technological disciplines and to inculcate in them a high degree of
social consciousness and human values, thereby enabling them to
face the challenges of life with courage and conviction.

DEPARTMENT OF APPLIED ELECTRONICS & INSTRUMENTATION
COURSE HANDOUT: S7 Page 3
DEPARTMENT VISION
DEPARTMENT MISSION
To evolve into a centre of academic excellence, developing
professionals in the field of electronics and instrumentation to
excel in academia and industry.
Facilitate comprehensive knowledge transfer with latest
theoretical and practical concepts, developing good relationship
with industrial, academic and research institutions thereby
moulding competent professionals with social commitment.
DEPARTMENT OF APPLIED ELECTRONICS & INSTRUMENTATION
COURSE HANDOUT: S7 Page 4
PROGRAMME EDUCATIONAL OBJECTIVES
PROGRAMME OUTCOMES
PEOI: Graduates will possess engineering skills, sound knowledge and professional attitude, in electronics and instrumentation to become competent engineers.
PEOII: Graduates will have confidence to design and develop instrument systems and to take up engineering challenges.
PEOIII: Graduates will possess commendable leadership qualities, will maintain the attitude to learn new things and will be capable to adapt themselves to industrial scenario.
Engineering Graduates will be able to:
PO1. Engineering knowledge: Apply the knowledge of mathematics, science, engineering fundamentals, and an engineering specialization to the solution of complex engineering problems.
PO2. Problem analysis: Identify, formulate, review research literature, and analyze complex engineering problems reaching substantiated conclusions using first principles of mathematics, natural sciences, and engineering sciences.
PO3. Design/development of solutions: Design solutions for complex engineering problems and design system components or processes that meet the specified needs with appropriate consideration for the public health and safety, and the cultural, societal, and environmental considerations.

DEPARTMENT OF APPLIED ELECTRONICS & INSTRUMENTATION
COURSE HANDOUT: S7 Page 5
PO4. Conduct investigations of complex problems: Use research-based knowledge and research methods including design of experiments, analysis and interpretation of data, and synthesis of the information to provide valid conclusions.
PO5. Modern tool usage: Create, select, and apply appropriate techniques, resources, and modern engineering and IT tools including prediction and modeling to complex engineering activities with an understanding of the limitations.
PO6. The engineer and society: Apply reasoning informed by the contextual knowledge to assess societal, health, safety, legal and cultural issues and the consequent responsibilities relevant to the professional engineering practice.
PO7. Environment and sustainability: Understand the impact of the professional engineering solutions in societal and environmental contexts, and demonstrate the knowledge of, and nee for sustainable development.
PO8. Ethics: Apply ethical principles and commit to professional ethics and responsibilities and norms of the engineering practice.
PO9. Individual and team work: Function effectively as an individual, and as a member or leader in diverse teams, and in multidisciplinary settings.
PO10. Communication: Communicate effectively on complex engineering activities with the engineering community and with society at large, such as, being able to comprehend and write effective reports and design documentation, make effective presentations, and give and receive clear instructions.

DEPARTMENT OF APPLIED ELECTRONICS & INSTRUMENTATION
COURSE HANDOUT: S7 Page 6
PO11. Project management and finance: Demonstrate knowledge and understanding of the engineering and management principles and apply these to one’s own work, as a member and leader in a team, to manage projects and in multidisciplinary environments.
PO12. Life-long learning: Recognize the need for, and have the preparation and ability to engage in independent and life-long learning in the broadest context of technological change.
DEPARTMENT OF APPLIED ELECTRONICS & INSTRUMENTATION
COURSE HANDOUT: S7 Page 7
Program Specific Outcome
Students of the program
PSO 1: will have sound technical skills in electronics and instrumentation.
PSO 2: will be capable of developing instrument systems and methods complying with standards.
PSO 3: will be able to learn new concepts, exhibit leadership qualities and adapt to changing industrial scenarios
DEPARTMENT OF APPLIED ELECTRONICS & INSTRUMENTATION
COURSE HANDOUT: S7 Page 8
INDEX
1. ASSIGNMENT SCHEDULE
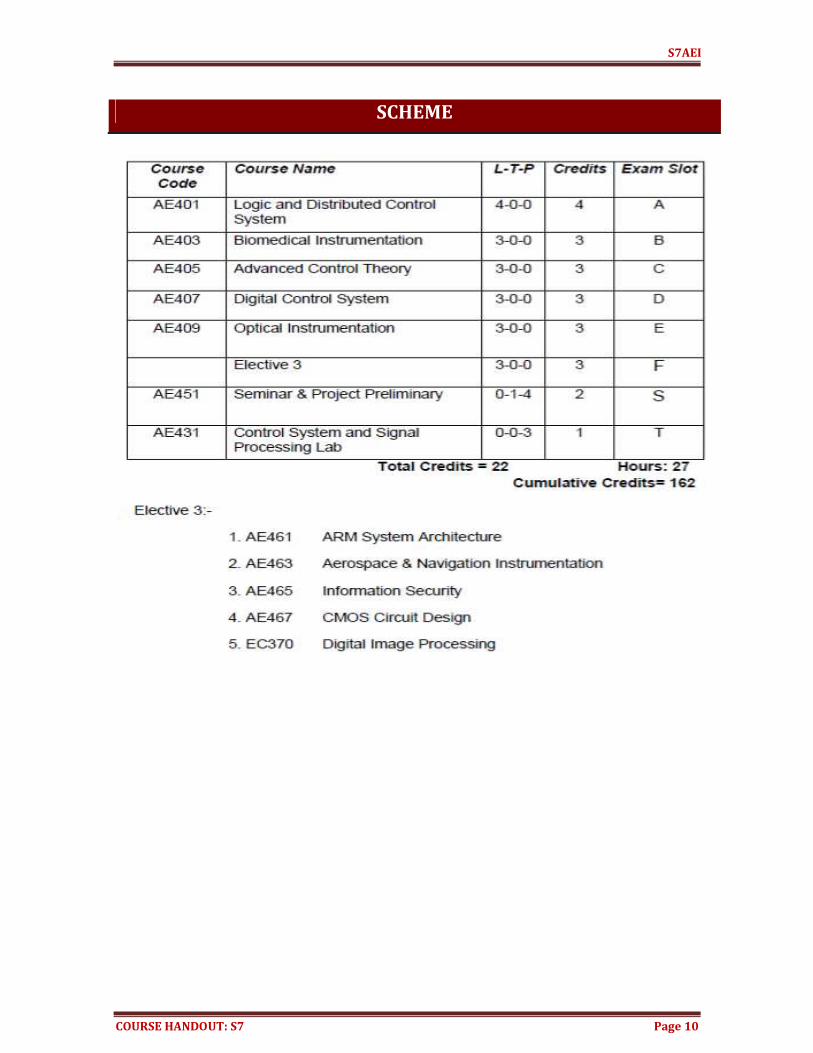
2. SCHEME
3. AE401 : Logic and Distributed Control System
3.1. COURSE INFORMATION SHEET 3.2. COURSE PLAN 3.3. ASSIGNMENT SHEETS 3.4. TUTORIALS
4. AE403 : Biomedical Instrumentation
4.1. COURSE INFORMATION SHEET 4.2. COURSE PLAN 4.3. ASSIGNMENT SHEETS 4.4. TUTORIALS
5. AE405 Advanced Control Theory
5.1. COURSE INFORMATION SHEET 5.2. COURSE PLAN 5.3. ASSIGNMENT SHEETS 5.4. TUTORIALS
6. AE407 Digital Control System
6.1. COURSE INFORMATION SHEET 6.2. COURSE PLAN 6.3. ASSIGNMENT SHEETS 6.4. TUTORIALS
7. AE409 Optical Instrumentation
7.1. COURSE INFORMATION SHEET 7.2. COURSE PLAN 7.3. ASSIGNMENT SHEETS 7.4. TUTORIALS
8. AE463 Aerospace & Navigation Instrumentation 8.1. COURSE INFORMATION SHEET 8.2. COURSE PLAN 8.3. ASSIGNMENT SHEETS 8.4. TUTORIALS
9. AE 451:SEMINAR & PROJECT PRELIMINARY
9.1. COURSE INFORMATION SHEET 9.2. COURSE PLAN 9.3. ASSIGNMENT SHEETS 9.4. TUTORIALS
10. AE431 CONTROL SYSTEM AND SIGNAL PROCESSING LAB
10.1. COURSE INFORMATION SHEET 10.2. COURSE PLAN 10.3. ASSIGNMENT SHEETS 10.4. TUTORIALS
DEPARTMENT OF APPLIED ELECTRONICS & INSTRUMENTATION
COURSE HANDOUT: S7 Page 9
ASSIGNMENT SCHEDULE
Week 4 AE401 : Logic and Distributed Control System
Week 5 AE403 : Biomedical Instrumentation
Week 5 AE405 Advanced Control Theory
Week 6 AE407 Digital Control System
Week 7 AE409 Optical Instrumentation
Week 8 AE463 Aerospace & Navigation Instrumentation
Week 8 AE401 : Logic and Distributed Control System
Week 9 AE403 : Biomedical Instrumentation
Week 9 AE405 Advanced Control Theory
Week 12 AE407 Digital Control System
Week 12 AE409 Optical Instrumentation
Week 13 AE463 Aerospace & Navigation Instrumentation
S7AEI
COURSE HANDOUT: S7 Page 10
SCHEME
S7AEI
COURSE HANDOUT: S7 Page 11
AE401 Logic and
Distributed Control
System
S7AEI
COURSE HANDOUT: S7 Page 12
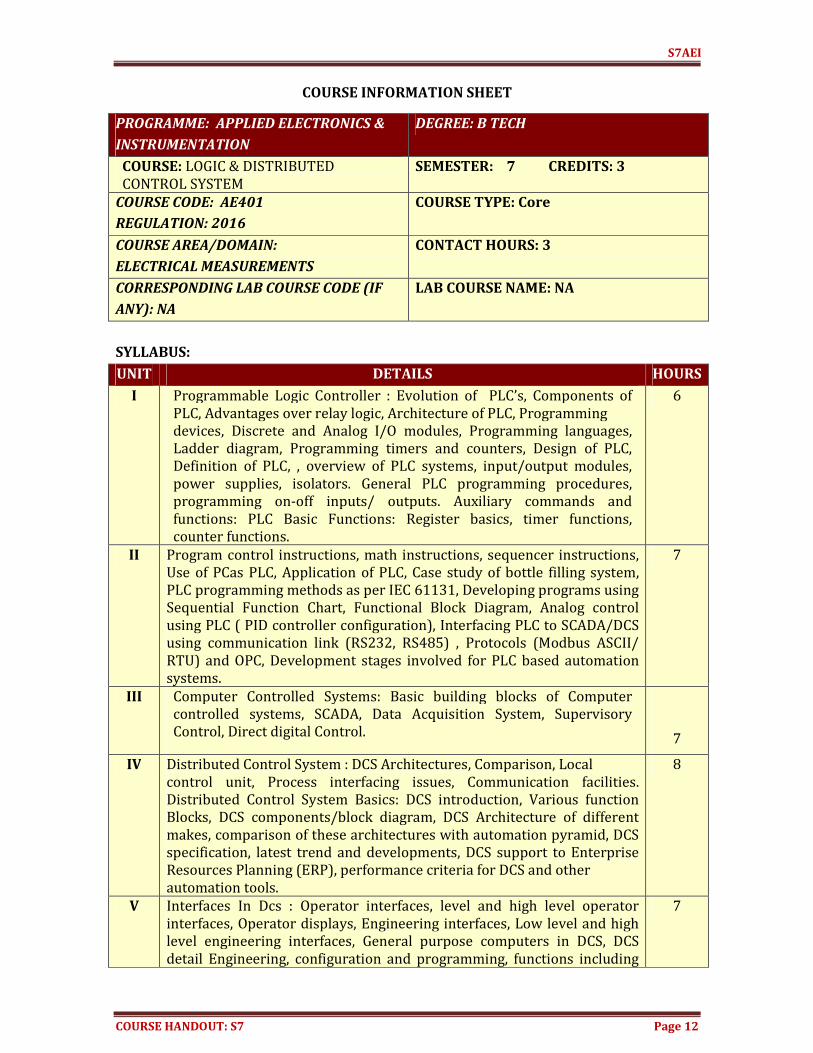
COURSE INFORMATION SHEET
PROGRAMME: APPLIED ELECTRONICS &
INSTRUMENTATION
DEGREE: B TECH
COURSE: LOGIC & DISTRIBUTED CONTROL SYSTEM
SEMESTER: 7 CREDITS: 3
COURSE CODE: AE401
REGULATION: 2016
COURSE TYPE: Core
COURSE AREA/DOMAIN:
ELECTRICAL MEASUREMENTS
CONTACT HOURS: 3
CORRESPONDING LAB COURSE CODE (IF
ANY): NA
LAB COURSE NAME: NA
SYLLABUS:
UNIT DETAILS HOURS
I Programmable Logic Controller : Evolution of PLC’s, Components of PLC, Advantages over relay logic, Architecture of PLC, Programming devices, Discrete and Analog I/O modules, Programming languages, Ladder diagram, Programming timers and counters, Design of PLC, Definition of PLC, , overview of PLC systems, input/output modules, power supplies, isolators. General PLC programming procedures, programming on-off inputs/ outputs. Auxiliary commands and functions: PLC Basic Functions: Register basics, timer functions, counter functions.
6
II Program control instructions, math instructions, sequencer instructions, Use of PCas PLC, Application of PLC, Case study of bottle filling system, PLC programming methods as per IEC 61131, Developing programs using Sequential Function Chart, Functional Block Diagram, Analog control using PLC ( PID controller configuration), Interfacing PLC to SCADA/DCS using communication link (RS232, RS485) , Protocols (Modbus ASCII/ RTU) and OPC, Development stages involved for PLC based automation systems.
7
III Computer Controlled Systems: Basic building blocks of Computer controlled systems, SCADA, Data Acquisition System, Supervisory Control, Direct digital Control.
7
IV Distributed Control System : DCS Architectures, Comparison, Local control unit, Process interfacing issues, Communication facilities. Distributed Control System Basics: DCS introduction, Various function Blocks, DCS components/block diagram, DCS Architecture of different makes, comparison of these architectures with automation pyramid, DCS specification, latest trend and developments, DCS support to Enterprise Resources Planning (ERP), performance criteria for DCS and other automation tools.
8
V Interfaces In Dcs : Operator interfaces, level and high level operator interfaces, Operator displays, Engineering interfaces, Low level and high level engineering interfaces, General purpose computers in DCS, DCS detail Engineering, configuration and programming, functions including
7

S7AEI
COURSE HANDOUT: S7 Page 13
database management, reporting, alarm management, diagnosis. VI Process Safety & Safety Management System : Process safety and Safety
Management Systems: Introduction to process safety, risk, risk terminologies, consequence and risk, risk measurement, Process Hazard Analysis (PHA), Hazard and operability study ( HaZOp), Safety Integrity Level (SIL), Introduction to IEC61511 standard for Functional safety, protection layers, Safety Instrumented System: function, architecture, safety life cycle, Application of safety system
7
TOTAL HOURS 42
TEXT/REFERENCE BOOKS:
T/R BOOK TITLE/AUTHORS/PUBLICATION
T1 John. W. Webb Ronald A Reis - Programmable Logic Controllers - Principles and Applications, Fourth edition, Prentice Hall Inc., New Jersey, 1998.
T2 Michael P. Lukas, ‘Distributed Control Systems’, Van Nostrand Reinhold Co.,Canada,1986
T3 Petruzella, ‘Industrial Electronics’, McGraw Hill, Second edition, 1997.
R4 Krishna Kant – Computer based Industrial Control, Prentice Hall, New Delhi, 1997
COURSE PRE-REQUISITES:NIL
C.CODE COURSE NAME DESCRIPTION SEM
COURSE OBJECTIVES:
1 To give an introductory knowledge about PLC and the programming languages.
2 To give basic knowledge in the architecture and local control unit of distributed control system.
3 To give adequate information in the interfaces used in DCS.
4 To give basic knowledge about Computer Controlled Systems.
COURSE OUTCOMES:
SNO DESCRIPTION Blooms’ Taxonomy
Level
1 Introduce the basics of computer controlled process systems
Knowledge (Level 1)
2 Introduce the fundamentals of PLC & DCS Understand (Level 2)
3 Basic concepts of PLC programming Apply (Level 3)
4 Write sample programs for typical industrial Analyze

S7AEI
COURSE HANDOUT: S7 Page 14
application (Level 4)
5 Hardwire the programs in simple relay logics Evaluate (Level 5)
CO – PO and CO – PSO mapping
PO1 PO2 PO3 PO4 PO5 PO6 PO7 PO8 PO9 PO10 PO11 PO12 PSO1 PSO2 PSO3 1 3 1
2 2
3 2
4 3 1
5 3 3 1 1
Justification
Course Outcome Justification 1 Basics of computer controlled
2 Only introduction covered
3 Programming introduction
4 Application level
5 Design level
GAPS IN THE SYLLABUS - TO MEET INDUSTRY/PROFESSION REQUIREMENTS:
SNO DESCRIPTION PROPOSED
ACTIONS
RELEVANCE
WITH POs
RELEVANCE
WITH PSOs
1 Relay logic Covered in Theory sessions 10,3 ,2 1,2,3 PROPOSED ACTIONS: TOPICS BEYOND SYLLABUS/ASSIGNMENT/INDUSTRY VISIT/GUEST LECTURER/NPTEL ETC
TOPICS BEYOND SYLLABUS/ADVANCED TOPICS/DESIGN:
SNO DESCRIPTION PROPOSED
ACTIONS
RELEVANCE
WITH POs
RELEVANCE
WITH PSOs
1 Field bus www.fieldbus.org 2,3,10 1,2,3
WEB SOURCE REFERENCES:
1 Isa.org
2 Iec.org
DELIVERY/INSTRUCTIONAL METHODOLOGIES:
☐CHALK & TALK ☐STUD. ASSIGNMENT ☐WEB RESOURCES ☐LCD/SMART BOARDS
S7AEI
COURSE HANDOUT: S7 Page 15
☐STUD. SEMINARS ☐ADD-ON COURSES
ASSESSMENT METHODOLOGIES-DIRECT
☐ASSIGNMENTS ☐STUD. SEMINARS ☐TESTS/MODEL EXAMS
☐UNIV. EXAMINATION
☐STUD. LAB PRACTICES
☐STUD. VIVA ☐MINI/MAJOR PROJECTS
☐CERTIFICATIONS
☐ADD-ON COURSES ☐OTHERS
ASSESSMENT METHODOLOGIES-INDIRECT
☐ASSESSMENT OF COURSE OUTCOMES (BY FEEDBACK, ONCE)
☐STUDENT FEEDBACK ON FACULTY (TWICE)
☐ASSESSMENT OF MINI/MAJOR PROJECTS BY EXT. EXPERTS
☐OTHERS
Prepared by Approved by Mr Krishna Kumar K.P Ms. Liza Annie Joseph (Faculty) (HOD)

S7AEI
COURSE HANDOUT: S7 Page 16
Course Plan
Sl.No Topic Day 1. Programmable Logic Controller : Evolution of PLC’s, Components of
PLC, Advantages over relay logic, Day 1
2. Architecture of PLC, Programming devices, Discrete and Analog I/O modules
Day 2
3. Programming timers and counters, Day 3 4. Design of PLC, Day 4 5. Definition of PLC, , overview of PLC systems, input/output modules,
power supplies Day 5
6. General PLC programming procedures, programming on-off inputs/outputs. Auxiliary commands and functions:
Day 6
7. PLC Basic Functions: Register basics, timer functions, counter functions Day 7 8. Program control instructions, math instructions, sequencer instruction Day 8 9. . Use of PCas PLC, Application of PLC Day 9 10. Case study of bottle filling system, Day 10 11. PLC programming methods as per IEC 61131 Day 11 12. Functional Block Diagram, Analog control using PLC ( PID controller
configuration), Day 12
13. Interfacing PLC to SCADA/DCS using communication link (RS232, RS485) , Protocols (Modbus ASCII/RTU) and OPC
Day 13
14. Programming methods Day 14 15. Computer Controlled Systems: Basic building blocks of Computer
controlled systems Day 15
16. SCADA Day 16 17. Data Acquisition System, Supervisory Control, Direct digital Control. Day 17 18. Distributed Control System : DCS Architectures, Comparison, Local
control unit, Day 18
19. Process interfacing issues, Communication facilities. Distributed Control
Day 19
20. System Basics: DCS introduction, Various function Blocks Day 20 21. DCS components/block diagram Day 21 22. DCS Architecture of different makes, comparison of these architectures
with automation pyramid, DCS specification Day 22
23. Latest trend and developments Day 23
24. DCS support to Enterprise Resources Planning (ERP), performance criteria for DCS and other automation tools.
Day 24
25. Interfaces In DCS: Operator interfaces, level and high level operator interfaces
Day 25
26. Operator displays, Engineering interfaces, Low level and high level engineering interfaces
Day 26
27. General purpose computers in DCS, Day 27 28. DCS detail Engineering, configuration and programming, functions
including database management, Day 28
29. Reporting, alarm management, diagnosis Day 29 30. Process Safety & Safety Management System Day 30

S7AEI
COURSE HANDOUT: S7 Page 17
31. Process safety and Safety Management Systems: Day 31 32. Introduction to process safety, risk Day 32 33. risk terminologies, consequence and risk, risk measurement Day 33 34. Process Hazard Analysis (PHA), Day 34 35. Hazard and operability study ( HaZOp), Day 35 36. Safety Integrity Level (SIL), Day 36 37. Introduction to IEC61511 standard for Functional safety Day 37 38. Protection layers, Day 38 39. Safety Instrumented System: function, architecture, Day 39 40. Safety life cycle, Application of safety system Day 40

S7AEI
COURSE HANDOUT: S7 Page 18
TUTORIAL PROBLEMS
1) Write a ladder program to implement the logic Y=(ACD+B).E
2) Write a ladder program to implement set /reset latch.
ASSIGNMENT QUESTIONS
Q1) Design a ladder program to implement a bottle filling operation.
Q2) Explain IEC 61131 programming methods.
Q3) Explain how will you a DCS can be connected to a PLC.
Q4) Explain Safety instrumented systems.
S7AEI
COURSE HANDOUT: S7 Page 19
AE403 Biomedical
Instrumentation
S7AEI
COURSE HANDOUT: S7 Page 20
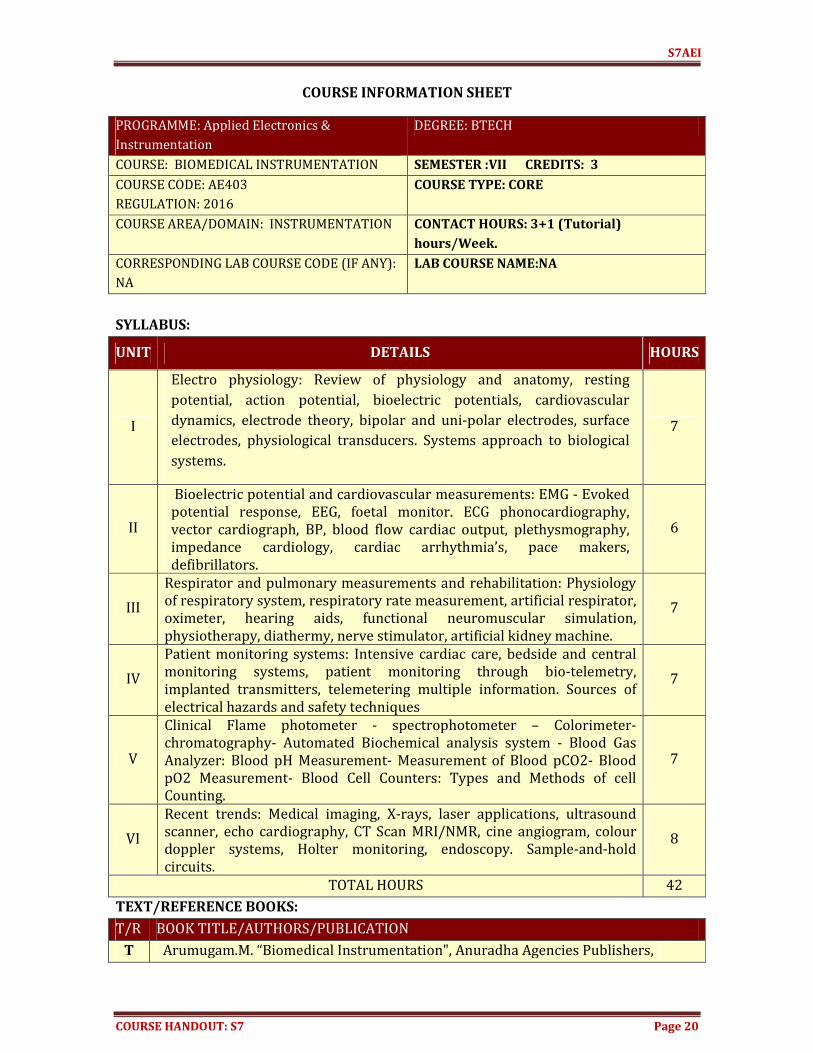
COURSE INFORMATION SHEET
PROGRAMME: Applied Electronics & Instrumentation
DEGREE: BTECH
COURSE: BIOMEDICAL INSTRUMENTATION SEMESTER :VII CREDITS: 3
COURSE CODE: AE403 REGULATION: 2016
COURSE TYPE: CORE
COURSE AREA/DOMAIN: INSTRUMENTATION CONTACT HOURS: 3+1 (Tutorial)
hours/Week.
CORRESPONDING LAB COURSE CODE (IF ANY): NA
LAB COURSE NAME:NA
SYLLABUS:
UNIT DETAILS HOURS
I
Electro physiology: Review of physiology and anatomy, resting potential, action potential, bioelectric potentials, cardiovascular dynamics, electrode theory, bipolar and uni-polar electrodes, surface electrodes, physiological transducers. Systems approach to biological systems.
7
II
Bioelectric potential and cardiovascular measurements: EMG - Evoked potential response, EEG, foetal monitor. ECG phonocardiography, vector cardiograph, BP, blood flow cardiac output, plethysmography, impedance cardiology, cardiac arrhythmia’s, pace makers, defibrillators.
6
III
Respirator and pulmonary measurements and rehabilitation: Physiology of respiratory system, respiratory rate measurement, artificial respirator, oximeter, hearing aids, functional neuromuscular simulation, physiotherapy, diathermy, nerve stimulator, artificial kidney machine.
7
IV
Patient monitoring systems: Intensive cardiac care, bedside and central monitoring systems, patient monitoring through bio-telemetry, implanted transmitters, telemetering multiple information. Sources of electrical hazards and safety techniques
7
V
Clinical Flame photometer - spectrophotometer – Colorimeter- chromatography- Automated Biochemical analysis system - Blood Gas Analyzer: Blood pH Measurement- Measurement of Blood pCO2- Blood pO2 Measurement- Blood Cell Counters: Types and Methods of cell Counting.
7
VI
Recent trends: Medical imaging, X-rays, laser applications, ultrasound scanner, echo cardiography, CT Scan MRI/NMR, cine angiogram, colour doppler systems, Holter monitoring, endoscopy. Sample-and-hold circuits.
8
TOTAL HOURS 42
TEXT/REFERENCE BOOKS:
T/R BOOK TITLE/AUTHORS/PUBLICATION
T Arumugam.M. “Biomedical Instrumentation", Anuradha Agencies Publishers,
S7AEI
COURSE HANDOUT: S7 Page 21
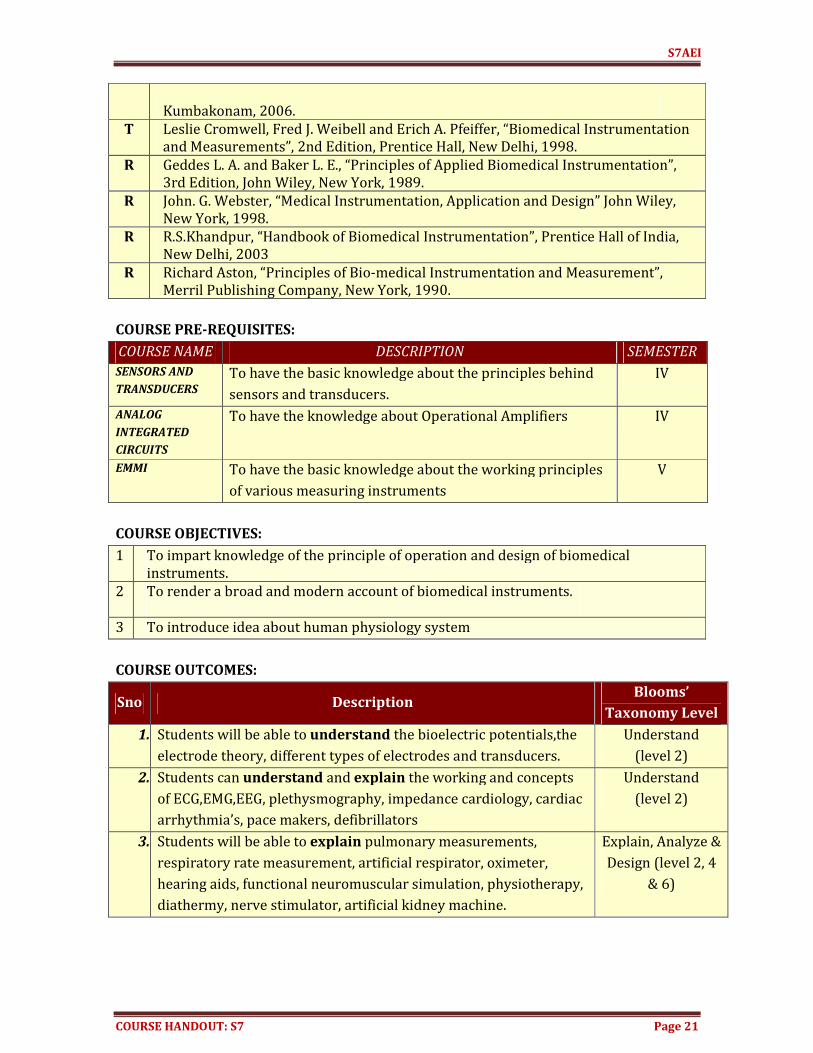
Kumbakonam, 2006.
T Leslie Cromwell, Fred J. Weibell and Erich A. Pfeiffer, “Biomedical Instrumentation and Measurements”, 2nd Edition, Prentice Hall, New Delhi, 1998.
R Geddes L. A. and Baker L. E., “Principles of Applied Biomedical Instrumentation”, 3rd Edition, John Wiley, New York, 1989.
R John. G. Webster, “Medical Instrumentation, Application and Design” John Wiley, New York, 1998.
R R.S.Khandpur, “Handbook of Biomedical Instrumentation”, Prentice Hall of India, New Delhi, 2003
R Richard Aston, “Principles of Bio-medical Instrumentation and Measurement”, Merril Publishing Company, New York, 1990.
COURSE PRE-REQUISITES:
COURSE NAME DESCRIPTION SEMESTER
SENSORS AND
TRANSDUCERS
To have the basic knowledge about the principles behind sensors and transducers.
IV
ANALOG
INTEGRATED
CIRCUITS
To have the knowledge about Operational Amplifiers IV
EMMI To have the basic knowledge about the working principles of various measuring instruments
V
COURSE OBJECTIVES:
1 To impart knowledge of the principle of operation and design of biomedical instruments.
2 To render a broad and modern account of biomedical instruments.
3 To introduce idea about human physiology system
COURSE OUTCOMES:
Sno Description Blooms’
Taxonomy Level
1. Students will be able to understand the bioelectric potentials,the electrode theory, different types of electrodes and transducers.
Understand (level 2)
2. Students can understand and explain the working and concepts of ECG,EMG,EEG, plethysmography, impedance cardiology, cardiac arrhythmia’s, pace makers, defibrillators
Understand (level 2)
3. Students will be able to explain pulmonary measurements, respiratory rate measurement, artificial respirator, oximeter, hearing aids, functional neuromuscular simulation, physiotherapy, diathermy, nerve stimulator, artificial kidney machine.
Explain, Analyze & Design (level 2, 4
& 6)

S7AEI
COURSE HANDOUT: S7 Page 22
4. Students are able to understand Patient monitoring systems, patient monitoring through bio-telemetry, Sources of electrical hazards and safety techniques
Analyze & Design (level 4 & 6)
5. Students are able to understand and analyze Clinical Flame photometer ,spectrophotometer ,Colorimeter,chromatography, Blood Gas Analyz, Blood pH Measurement, Blood Cell Counters
Understand & Explain
(level 2 & 4)
6. Students are able to understand and explain Medical imaging, X-rays, laser applications, ultrasound scanner, echo cardiography, CT Scan MRI/NMR, cine angiogram, colour doppler systems, Holter monitoring, endoscopy.
Understand & Explain
(level 2 & 4)
CO-PO AND CO-PSO MAPPING
PO1 PO2 PO3 PO4 PO5 PO6 PO7 PO8 PO9 PO10 PO11 PO12 PSO1 PSO2 PSO3
CO.1 3 - - - - - - - - - - - 2 - -
CO.2 3 - - - - - - - - - - - 2 - -
CO.3 - 2 - - 1 - - - - - - - - 1 2
CO.4 - 2 - - 1 - - - - - - - 2 1 -
CO.5 3 - 1 - - - - - - - - - 2 - 2
CO.6 3 - 1 - - - - - - - - - 2 - 2
JUSTIFICATIONS FOR CO - PO-PSO MAPPING
MAPPING LOW/MEDIUM/HIGH
JUSTIFICATION
CO.1- PO9 L The concept of multidisciplinary approach is well understood.
CO.1- PSO3 L New concepts are defined and learned.
CO.2-PO1 M Various fundamental key elements are described.
CO.2-PO2 L Understands the work of different elements in combination
CO.2-PSO2 M Instrument developing methods are made in focus.
CO.2-PSO3 M A new concept that suits the changing industrial scenario is being implemented.
CO.3- PO2 L Different concepts are being analyzed to produce engineering solutions.
CO.3-PO3 M Understanding different systems, solutions for its development are identified.
CO.3 –PSO1 L Analysis skill is improved.
CO.3- PSO3 M New concepts in latest technologies are being described.
CO.4-PO5 H Modern engineering idea has been out in the open
CO.4-PSO1 L Summarization of concepts that studied relating different modes of operation is improved

S7AEI
COURSE HANDOUT: S7 Page 23
CO.4-PSO3 H New concepts in biomedical instrumentation are described.
CO.5-PO2 H Different systems are analyzed.
CO.5-PO5 H Modern analysis technique is understood.
CO.5-PO12 M Basic concepts used in the latest technology advancement
CO.5-PSO2 H With the knowledge of modern techniques development of new concepts is capable.
CO.6-PO3 H Knowledge of traditional approach appropriate considerations for complex engineering problems can be designed.
CO.6-PO4 H Interpretations of the systems are done with the acquired knowledge.
CO.6-PS03 M With the comparison study of different approaches new concepts are adapted.
GAPS IN THE SYLLABUS - TO MEET INDUSTRY/PROFESSION REQUIREMENTS:
SNO DESCRIPTION PROPOSED ACTIONS RELEVANCE WITH POs RELEVANCE WITH PSOs
1 Biometrics NPTEL PO1, PO2 PSO3
2 Heart lung machine NPTEL PO1, PO2 PSO3 PROPOSED ACTIONS: TOPICS BEYOND SYLLABUS/ASSIGNMENT/INDUSTRY VISIT/GUEST LECTURER/NPTEL ETC
TOPICS BEYOND SYLLABUS/ADVANCED TOPICS/DESIGN:
SNO DESCRIPTION PROPOSED ACTIONS
RELEVANCE WITH POs
RELEVANCE WITH PSOs
1 ECG leads-Wilson’s center Assignment PO1, PO2 PSO1, PSO3
WEB SOURCE REFERENCES:
1 http://www.bio12.com/ch17/Notes.pdf
2 http://highered.mcgraw-hill.com/sites/dl/free/0070960526/323541/mhriib_ch11.pdf
3 http://www.bem.fi/book/15/15.htm
DELIVERY/INSTRUCTIONAL METHODOLOGIES:
☐ CHALK & TALK ☐ STUD. ASSIGNMENT ☐ WEB RESOURCES
☐ LCD/SMART BOARDS ☐ STUD. SEMINARS ☐ ADD-ON COURSES
ASSESSMENT METHODOLOGIES-DIRECT
☐ ASSIGNMENTS ☐ STUD. SEMINARS ☐ TESTS/MODEL
EXAMS
☐ UNIV.
EXAMINATION
S7AEI
COURSE HANDOUT: S7 Page 24
☐ STUD. LAB
PRACTICES
☐ STUD. VIVA ☐ MINI/MAJOR
PROJECTS
☐ CERTIFICATIONS
☐ ADD-ON
COURSES
☐ OTHERS
ASSESSMENT METHODOLOGIES-INDIRECT
☐ ASSESSMENT OF COURSE OUTCOMES (BY
FEEDBACK, ONCE)
☐ STUDENT FEEDBACK ON FACULTY
(TWICE)
☐ ASSESSMENT OF MINI/MAJOR PROJECTS
BY EXT. EXPERTS
☐ OTHERS
Prepared by Approved by
Parvathy Harikumar Ms. Liza Annie Joseph
(Course in charge) (HoD/ DAEI)
S7AEI
COURSE HANDOUT: S7 Page 25
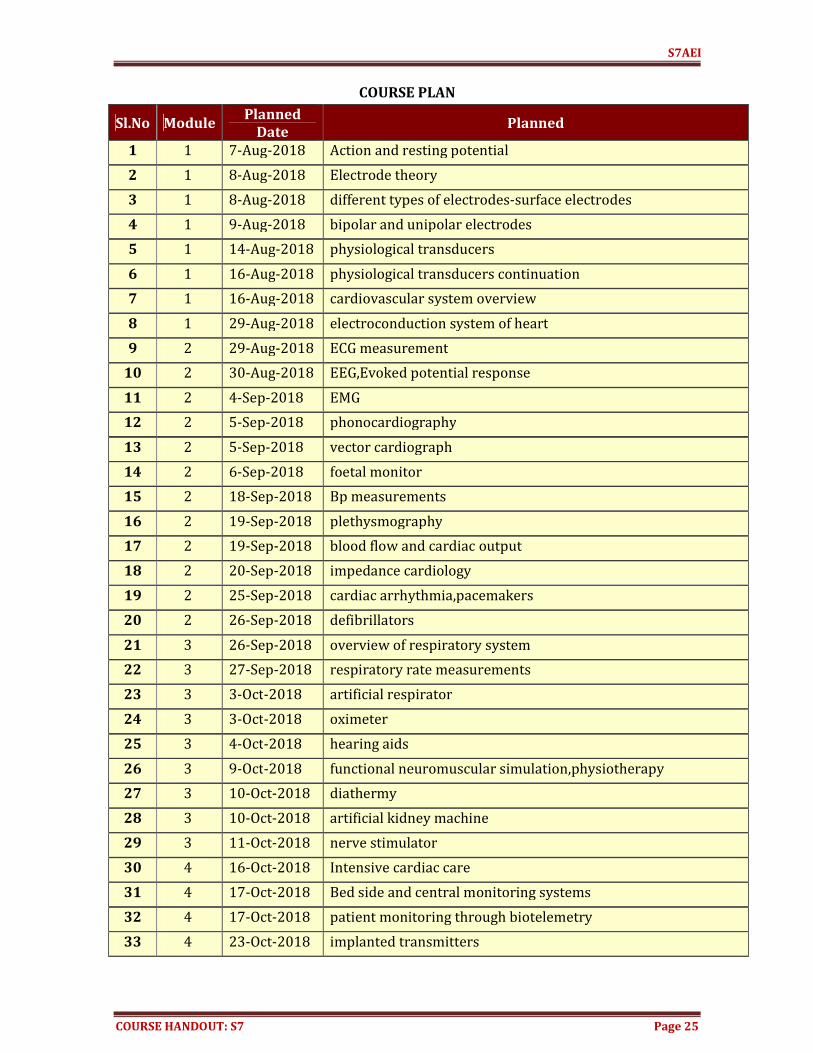
COURSE PLAN
Sl.No Module Planned
Date Planned
1 1 7-Aug-2018 Action and resting potential
2 1 8-Aug-2018 Electrode theory
3 1 8-Aug-2018 different types of electrodes-surface electrodes
4 1 9-Aug-2018 bipolar and unipolar electrodes
5 1 14-Aug-2018 physiological transducers
6 1 16-Aug-2018 physiological transducers continuation
7 1 16-Aug-2018 cardiovascular system overview
8 1 29-Aug-2018 electroconduction system of heart
9 2 29-Aug-2018 ECG measurement
10 2 30-Aug-2018 EEG,Evoked potential response
11 2 4-Sep-2018 EMG
12 2 5-Sep-2018 phonocardiography
13 2 5-Sep-2018 vector cardiograph
14 2 6-Sep-2018 foetal monitor
15 2 18-Sep-2018 Bp measurements
16 2 19-Sep-2018 plethysmography
17 2 19-Sep-2018 blood flow and cardiac output
18 2 20-Sep-2018 impedance cardiology
19 2 25-Sep-2018 cardiac arrhythmia,pacemakers
20 2 26-Sep-2018 defibrillators
21 3 26-Sep-2018 overview of respiratory system
22 3 27-Sep-2018 respiratory rate measurements
23 3 3-Oct-2018 artificial respirator
24 3 3-Oct-2018 oximeter
25 3 4-Oct-2018 hearing aids
26 3 9-Oct-2018 functional neuromuscular simulation,physiotherapy
27 3 10-Oct-2018 diathermy
28 3 10-Oct-2018 artificial kidney machine
29 3 11-Oct-2018 nerve stimulator
30 4 16-Oct-2018 Intensive cardiac care
31 4 17-Oct-2018 Bed side and central monitoring systems
32 4 17-Oct-2018 patient monitoring through biotelemetry
33 4 23-Oct-2018 implanted transmitters

S7AEI
COURSE HANDOUT: S7 Page 26
34 4 24-Oct-2018 sources of electrical hazards and safety techniques
35 5 24-Oct-2018 Clinical flame photometer,spectrophotometer
36 5 25-Oct-2018 colorimeter
37 5 30-Oct-2018 chromatography
38 5 31-Oct-2018 Blood gas analyzer
39 5 31-Oct-2018 Blood PH measurement
40 5 1-Nov-2018 Blood pO2 measurement
41 5 7-Nov-2018 Blood cell counters
42 6 7-Nov-2018 X rays
43 6 8-Nov-2018 LASER applications
44 6 13-Nov-2018 Ultrasound scanner
45 6 14-Nov-2018 Echo cardiography
46 6 14-Nov-2018 CT scan
47 6 15-Nov-2018 MRI/NMR
48 6 21-Nov-2018 cine angiogram
49 6 21-Nov-2018 colour doppler systems
50 6 22-Nov-2018 Holter monitoring
S7AEI
COURSE HANDOUT: S7 Page 27
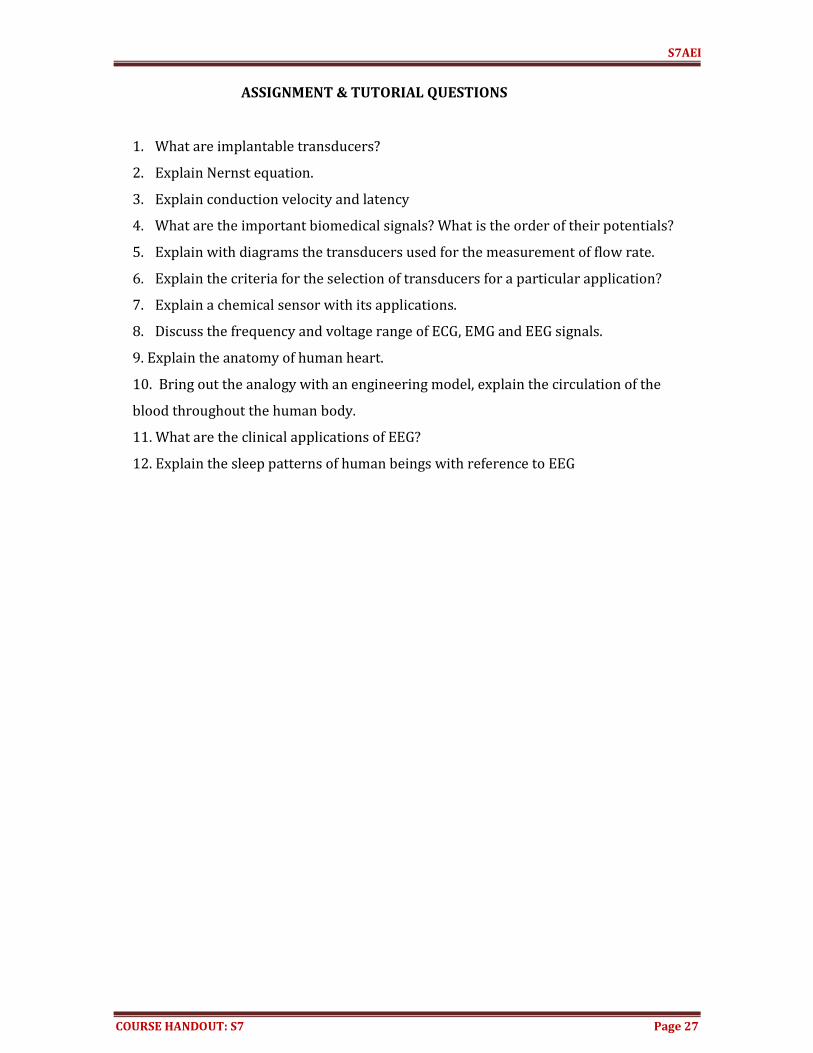
ASSIGNMENT & TUTORIAL QUESTIONS
1. What are implantable transducers?
2. Explain Nernst equation.
3. Explain conduction velocity and latency
4. What are the important biomedical signals? What is the order of their potentials?
5. Explain with diagrams the transducers used for the measurement of flow rate.
6. Explain the criteria for the selection of transducers for a particular application?
7. Explain a chemical sensor with its applications.
8. Discuss the frequency and voltage range of ECG, EMG and EEG signals.
9. Explain the anatomy of human heart.
10. Bring out the analogy with an engineering model, explain the circulation of the
blood throughout the human body.
11. What are the clinical applications of EEG?
12. Explain the sleep patterns of human beings with reference to EEG
S7AEI
COURSE HANDOUT: S7 Page 28
AE405
Advanced
Control
Theory
S7AEI
COURSE HANDOUT: S7 Page 29
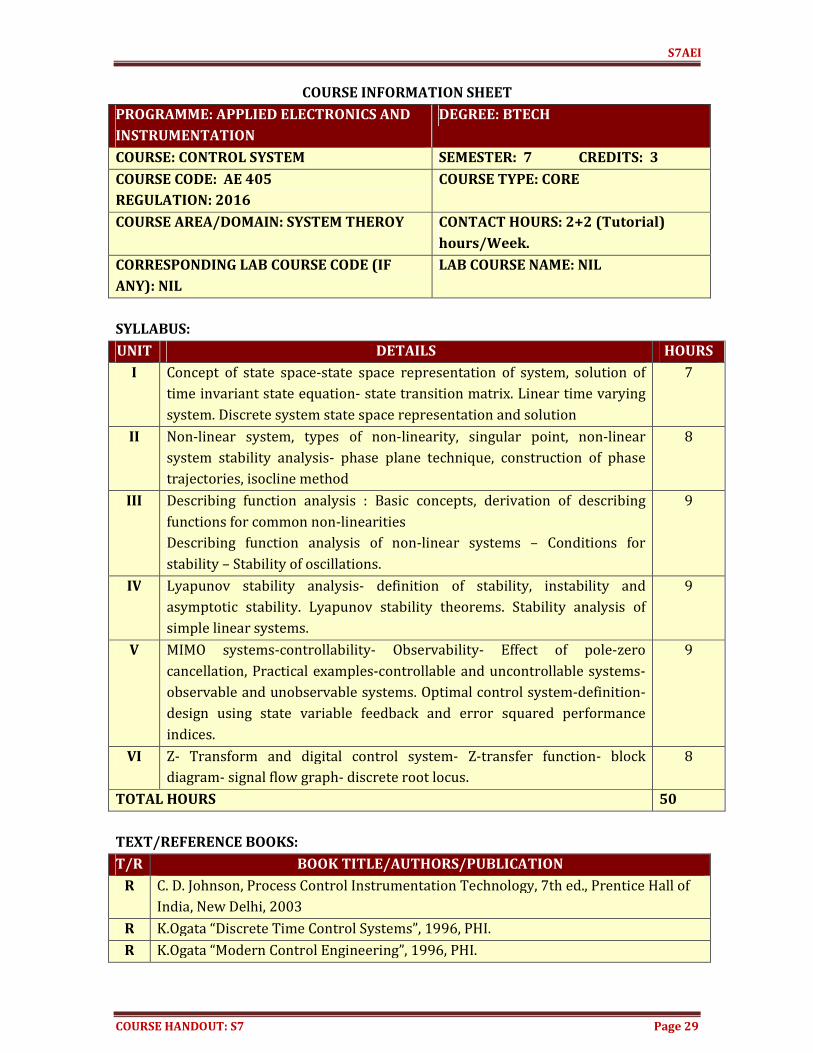
COURSE INFORMATION SHEET
PROGRAMME: APPLIED ELECTRONICS AND
INSTRUMENTATION
DEGREE: BTECH
COURSE: CONTROL SYSTEM SEMESTER: 7 CREDITS: 3
COURSE CODE: AE 405
REGULATION: 2016
COURSE TYPE: CORE
COURSE AREA/DOMAIN: SYSTEM THEROY CONTACT HOURS: 2+2 (Tutorial)
hours/Week.
CORRESPONDING LAB COURSE CODE (IF
ANY): NIL
LAB COURSE NAME: NIL
SYLLABUS:
UNIT DETAILS HOURS
I Concept of state space-state space representation of system, solution of time invariant state equation- state transition matrix. Linear time varying system. Discrete system state space representation and solution
7
II Non-linear system, types of non-linearity, singular point, non-linear system stability analysis- phase plane technique, construction of phase trajectories, isocline method
8
III Describing function analysis : Basic concepts, derivation of describing functions for common non-linearities Describing function analysis of non-linear systems – Conditions for stability – Stability of oscillations.
9
IV Lyapunov stability analysis- definition of stability, instability and asymptotic stability. Lyapunov stability theorems. Stability analysis of simple linear systems.
9
V MIMO systems-controllability- Observability- Effect of pole-zero cancellation, Practical examples-controllable and uncontrollable systems-observable and unobservable systems. Optimal control system-definition- design using state variable feedback and error squared performance indices.
9
VI Z- Transform and digital control system- Z-transfer function- block diagram- signal flow graph- discrete root locus.
8
TOTAL HOURS 50
TEXT/REFERENCE BOOKS:
T/R BOOK TITLE/AUTHORS/PUBLICATION
R C. D. Johnson, Process Control Instrumentation Technology, 7th ed., Prentice Hall of India, New Delhi, 2003
R K.Ogata “Discrete Time Control Systems”, 1996, PHI.
R K.Ogata “Modern Control Engineering”, 1996, PHI.
S7AEI
COURSE HANDOUT: S7 Page 30
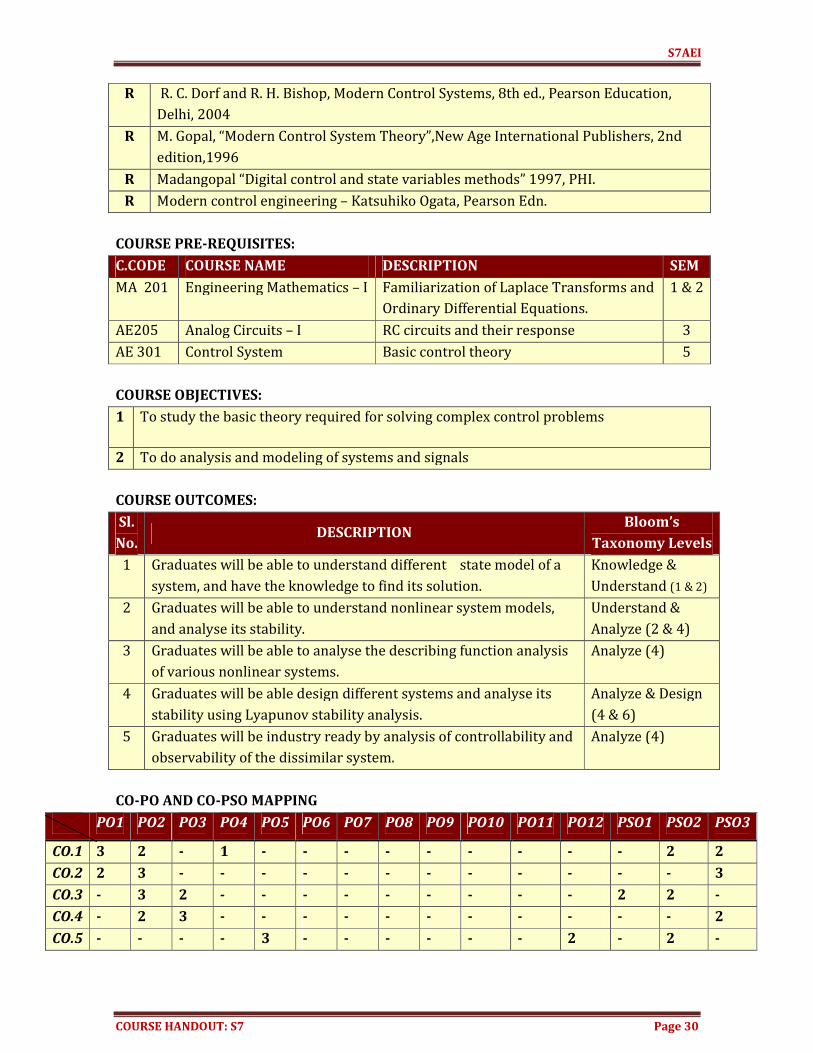
R R. C. Dorf and R. H. Bishop, Modern Control Systems, 8th ed., Pearson Education, Delhi, 2004
R M. Gopal, “Modern Control System Theory”,New Age International Publishers, 2nd edition,1996
R Madangopal “Digital control and state variables methods” 1997, PHI.
R Modern control engineering – Katsuhiko Ogata, Pearson Edn.
COURSE PRE-REQUISITES:
C.CODE COURSE NAME DESCRIPTION SEM
MA 201 Engineering Mathematics – I Familiarization of Laplace Transforms and Ordinary Differential Equations.
1 & 2
AE205 Analog Circuits – I RC circuits and their response 3
AE 301 Control System Basic control theory 5
COURSE OBJECTIVES:
1 To study the basic theory required for solving complex control problems
2 To do analysis and modeling of systems and signals
COURSE OUTCOMES:
Sl.
No. DESCRIPTION
Bloom’s
Taxonomy Levels
1 Graduates will be able to understand different state model of a system, and have the knowledge to find its solution.
Knowledge & Understand (1 & 2)
2 Graduates will be able to understand nonlinear system models, and analyse its stability.
Understand & Analyze (2 & 4)
3 Graduates will be able to analyse the describing function analysis of various nonlinear systems.
Analyze (4)
4 Graduates will be able design different systems and analyse its stability using Lyapunov stability analysis.
Analyze & Design (4 & 6)
5 Graduates will be industry ready by analysis of controllability and observability of the dissimilar system.
Analyze (4)
CO-PO AND CO-PSO MAPPING
PO1 PO2 PO3 PO4 PO5 PO6 PO7 PO8 PO9 PO10 PO11 PO12 PSO1 PSO2 PSO3
CO.1 3 2 - 1 - - - - - - - - - 2 2
CO.2 2 3 - - - - - - - - - - - - 3
CO.3 - 3 2 - - - - - - - - - 2 2 -
CO.4 - 2 3 - - - - - - - - - - - 2
CO.5 - - - - 3 - - - - - - 2 - 2 -
S7AEI
COURSE HANDOUT: S7 Page 31
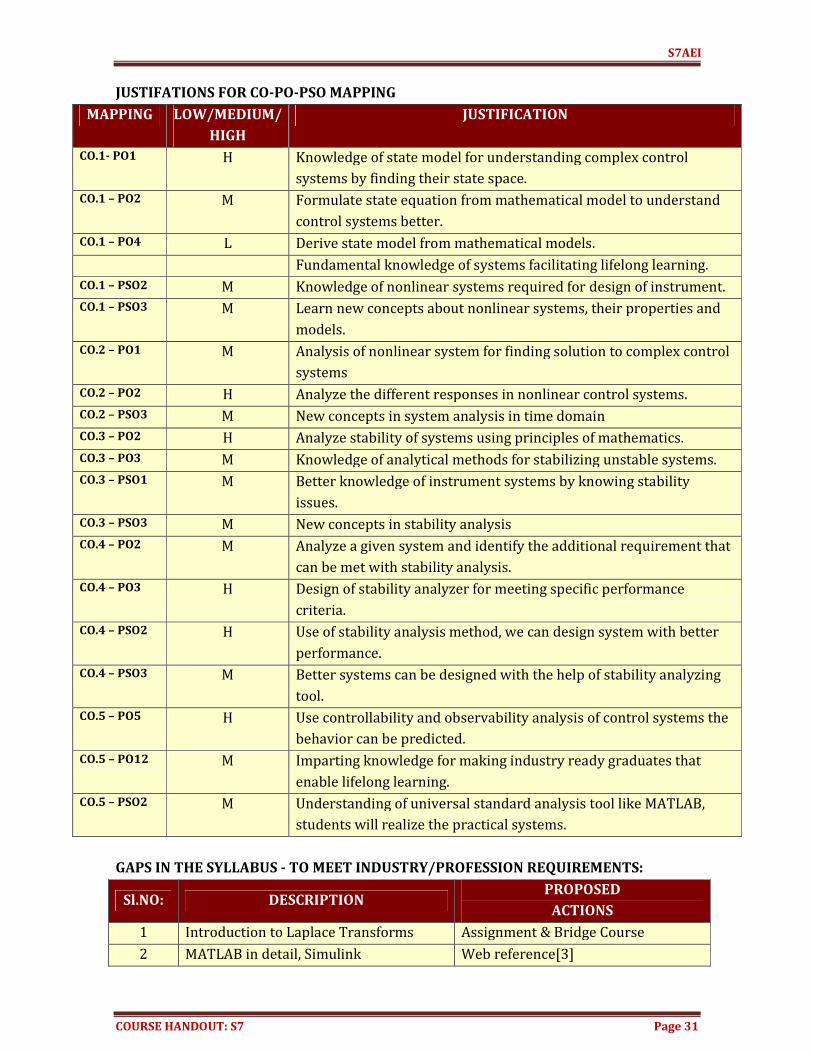
JUSTIFATIONS FOR CO-PO-PSO MAPPING
MAPPING LOW/MEDIUM/
HIGH JUSTIFICATION
CO.1- PO1 H Knowledge of state model for understanding complex control systems by finding their state space.
CO.1 – PO2 M Formulate state equation from mathematical model to understand control systems better.
CO.1 – PO4 L Derive state model from mathematical models. Fundamental knowledge of systems facilitating lifelong learning. CO.1 – PSO2 M Knowledge of nonlinear systems required for design of instrument. CO.1 – PSO3 M Learn new concepts about nonlinear systems, their properties and
models. CO.2 – PO1 M Analysis of nonlinear system for finding solution to complex control
systems CO.2 – PO2 H Analyze the different responses in nonlinear control systems. CO.2 – PSO3 M New concepts in system analysis in time domain CO.3 – PO2 H Analyze stability of systems using principles of mathematics. CO.3 – PO3 M Knowledge of analytical methods for stabilizing unstable systems. CO.3 – PSO1 M Better knowledge of instrument systems by knowing stability
issues. CO.3 – PSO3 M New concepts in stability analysis CO.4 – PO2 M Analyze a given system and identify the additional requirement that
can be met with stability analysis. CO.4 – PO3 H Design of stability analyzer for meeting specific performance
criteria. CO.4 – PSO2 H Use of stability analysis method, we can design system with better
performance. CO.4 – PSO3 M Better systems can be designed with the help of stability analyzing
tool. CO.5 – PO5 H Use controllability and observability analysis of control systems the
behavior can be predicted. CO.5 – PO12 M Imparting knowledge for making industry ready graduates that
enable lifelong learning. CO.5 – PSO2 M Understanding of universal standard analysis tool like MATLAB,
students will realize the practical systems.
GAPS IN THE SYLLABUS - TO MEET INDUSTRY/PROFESSION REQUIREMENTS:
Sl.NO: DESCRIPTION PROPOSED
ACTIONS
1 Introduction to Laplace Transforms Assignment & Bridge Course
2 MATLAB in detail, Simulink Web reference[3]

S7AEI
COURSE HANDOUT: S7 Page 32
PROPOSED ACTIONS: TOPICS BEYOND SYLLABUS/ASSIGNMENT/INDUSTRY VISIT/GUEST LECTURER/NPTEL ETC
TOPICS BEYOND SYLLABUS/ADVANCED TOPICS/DESIGN:
1 Conceptual problems, definitions, to help students in competitive examinations.
WEB SOURCE REFERENCES:
1 http://nptel.iitm.ac.in/courses/108101037/
2 http://nptel.iitm.ac.in/video.php?subjectId=108102043
3 http://nptel.iitm.ac.in/courses/Webcourse-contents/IIT-Delhi/Control%20system%20design%20n%20principles/index.htm
DELIVERY/INSTRUCTIONAL METHODOLOGIES:
☐ CHALK & TALK ☐ STUD. ASSIGNMENT ☐ WEB RESOURCES
☐ LCD/SMART BOARDS ☐ STUD. SEMINARS ☐ ADD-ON COURSES
ASSESSMENT METHODOLOGIES-DIRECT
☐ ASSIGNMENTS ☐ STUD. SEMINARS ☐ TESTS/MODEL
EXAMS
☐ UNIV.
EXAMINATION
☐ STUD. LAB
PRACTICES
☐ STUD. VIVA ☐ MINI/MAJOR
PROJECTS
☐ CERTIFICATIONS
☐ ADD-ON
COURSES
☐ OTHERS
ASSESSMENT METHODOLOGIES-INDIRECT
☐ ASSESSMENT OF COURSE OUTCOMES (BY
FEEDBACK, ONCE)
☐ STUDENT FEEDBACK ON FACULTY
(TWICE)
☐ ASSESSMENT OF MINI/MAJOR PROJECTS
BY EXT. EXPERTS
☐ OTHERS
Prepared by Approved by
Ms. Mary Hexy Ms. Liza Annie Joseph
Course in charge HoD

S7AEI
COURSE HANDOUT: S7 Page 33
COURSE PLAN
Sl.No Module Planned
Date Planned
1 1 06-Aug-18 Concept of state space-state space representation of system
2 1 08-Aug-18 solution of time invariant state equation
3 1 13-Aug-18 state transition matrix.
4 1 13-Aug-18 Linear time varying system
5 1 14-Aug-18 Discrete system state space representation and solution
6 1 29-Aug-18 Discrete system state space representation and solution
7 2 01-Sep-18 Non-linear system
8 2 03-Sep-18 types of non-linearity
9 2 03-Sep-18 singular point
10 2 04-Sep-18 non-linear system stability analysis
11 2 05-Sep-18 phase plane technique
12 2 17-Sep-18 construction of phase trajectories, isocline method
13 2 18-Sep-18 construction of phase trajectories, isocline method
14 2 19-Sep-18 construction of phase trajectories, isocline method
15 3 24-Sep-18 Describing function analysis : Basic concepts
16 3 24-Sep-18 Describing function analysis : Basic concepts,
17 3 25-Sep-18 derivation of describing functions for common non-linearities
18 3 26-Sep-18 derivation of describing functions for common non-linearities
19 3 01-Oct-18 derivation of describing functions for common non-linearities
20 4 01-Oct-18 Lyapunov stability analysis- definition of stability
21 4 03-Oct-18 instability and asymptotic stability.
22 4 08-Oct-18 instability and asymptotic stability.
23 4 09-Oct-18 Lyapunov stability theorems. Stability analysis of simple linear systems.
24 4 10-Oct-18 Lyapunov stability theorems. Stability analysis of simple linear systems.
25 5 15-Oct-18 MIMO systems-controllability- Observability
26 5 15-Oct-18 MIMO systems-controllability- Observability
27 5 16-Oct-18 Effect of pole-zero cancellation,
28 5 17-Oct-18 Practical examples-controllable and uncontrollable systems
29 5 29-Oct-18 observable and unobservable systems
30 5 29-Oct-18 design using state variable feedback and error squared performance indices.

S7AEI
COURSE HANDOUT: S7 Page 34
31 5 30-Oct-18 design using state variable feedback and error squared performance indices.
32 5 31-Oct-18 design using state variable feedback and error squared performance indices.
33 6 07-Nov-18 Z- Transform and digital control system
34 6 12-Nov-18 Z-transfer function
35 6 13-Nov-18 Z-transfer function - block diagram
36 6 14-Nov-18 signal flow graph- discrete root locus.

S7AEI
COURSE HANDOUT: S7 Page 35
ASSIGNMENT QUESTIONS
Assignment -1
1. Write the different nonlinearities occurring in a system.
Assignment -2
2. Derive describing function analysis of back-lash nonlinearity
3. Explain the describing function of dead zone non linearity.
4. Explain the describing function of saturation non linearity.

TUTORIAL 1
1. A linear second order servo is described by the equation
=0 with
Determine the singular point. Construct
2. Check the stability of the sampled data control system represented by the
characteristic equation
3. Construct a phase trajectory by delta method for a nonlinear s
the differential equation
and
4. Convert the following system matrix to canonical form and compute the state
Transition Matrix
=
5. A single input system is described by the following state equation
Tutorial -2
1. Explain the describing function of saturation non linearity A linear second order
servo is described by the equation
=0 with
Determine the singular point. Construct the phase trajectory.
TUTORIAL QUESTIONS
A linear second order servo is described by the equation
with
Determine the singular point. Construct the phase trajectory.
Check the stability of the sampled data control system represented by the
characteristic equation - 1.7 +1.04 - 0.268z + 0.024 = 0
Construct a phase trajectory by delta method for a nonlinear system represented by
the differential equation Choose the initial condition as X(0)=1
Convert the following system matrix to canonical form and compute the state
+ and y=
A single input system is described by the following state equation
Explain the describing function of saturation non linearity A linear second order
servo is described by the equation
with
Determine the singular point. Construct the phase trajectory.
S7AEI
Check the stability of the sampled data control system represented by the
ystem represented by
Choose the initial condition as X(0)=1
Convert the following system matrix to canonical form and compute the state
Explain the describing function of saturation non linearity A linear second order

S7AEI
COURSE HANDOUT: S7 Page 37
AE 407 Digital Control
System

S7AEI
COURSE HANDOUT: S7 Page 38
COURSE INFORMATION SHEET PROGRAMME: APPLIED ELECTRONICS AND
INSTRUMENTATION DEGREE: BTECH
COURSE: DIGITAL CONTROL SYSTEM SEMESTER: 7 CREDITS: 3 COURSE CODE: AE 407 REGULATION: KTU 2016
COURSE TYPE: CORE
COURSE AREA/DOMAIN: DIGITAL CONTROL SYSTEM
CONTACT HOURS: 3+1 (Tutorial) hours/Week.
CORRESPONDING LAB COURSE CODE (IF ANY): CONTROL SYSTEM AND SIGNAL PROCESSING
LAB COURSE NAME: CONTROL SYSTEM AND SIGNAL PROCESSING
SYLLABUS: UNIT DETAILS HOURS
I Introduction: Basic Elements of discrete data control systems, advantages of discrete data control systems, examples. Signal conversion & processing: Digital signals & coding, data conversion & quantization, sample and hold devices, Mathematical modeling of the sampling process; Data reconstruction and filtering of sampled signals: Zero order hold, first order Hold and polygonal hold.
9
II Review of Z transform. z transform and inverse z transform . Relationship between s- plane and z- plane- Difference equation . Solution by recursion and z-transform.
9
III Digital control systems- Pulse transfer function . z transform analysis of closed loop open loop systems- Modified z- transfer function- Stability of linear digital control systems
8
IV Stability tests- Steady state error analysis- Root loci -Frequency domain analysis- Bode plots- Gain margin and phase margin.
8
V Review of state space techniques to continuous data systems, state space representation of discrete time systems- Transfer function from state space model-various canonical forms- conversion of transfer function model to state space model-characteristics equation- solution to discrete state equations.
11
VI Controllability and Observability - Response between sampling instants using state variable approach-Pole placement using state feedback . Dynamic output feedback- Effects of finite wordlength on controllability and closed loop pole placement.
12
TOTAL HOURS 57
TEXT/REFERENCE BOOKS: T/R BOOK TITLE/AUTHORS/PUBLICATION
T B. C. Kuo , “Digital control systems” (Second Edition) , Oxford University Press,2007
T K. Ogatta, “Discrete Time control systems ”, 2nd ed. PHI),1995
T M. Gopal, “Digital Control systems and state variable methods”, Tata McGraw Hill R John Dorsey , “Continuous & Discrete Control Systems “, (MGH). R Nagrath & Gopal , “Control System Engineering” (Wiley Eastern). R F. Franklin, J.D. Powell, and M.L. Workman, “Digital control of Dynamic Systems”,
Addison - Wesley Longman, Inc., Menlo Park, CA , 1998

S7AEI
COURSE HANDOUT: S7 Page 39
COURSE PRE-REQUISITES: C.CODE COURSE NAME DESCRIPTION SEM
MA 101 DIFFERENTIAL EQUATIONS
FAMILIARIZATION OF ORDINARY DIFFERENTIAL EQUATIONS.
1
MA 102 CALCULUS FAMILIARIZATION OF LAPLACE TRANSFORMS
2
AE 301 CONTROL SYSTEM SYSTEM MODELING 5 AE307 SIGNALS AND SYSTEMS FAMILIARIZATION OF ZTRANSFORMS 5
COURSE OBJECTIVES: 1 To study the stability analysis of digital control system 2 To equip the basic knowledge of digital process control design
COURSE OUTCOMES:
Sl.
No. DESCRIPTION
Bloom’s
Taxonomy
Levels
1 Graduates will be able to analyze signals in both time domain and Z domain.
Analyze (4)
2 Graduates will be able to understand Z-transform and its properties
Understand (2)
3 Graduates will be able to understand and gain knowledge in stability analysis of digital control systems
Understand & knowledge (2 & 4)
4 Graduates will understand the basic knowledge necessary for system stability
Understand & knowledge (2 & 4)
5 Graduates will be able to analyze transient and steady state behaviors of linear discrete time control systems.
Analyze (4)
6 Graduates will be able to design the discrete-date control systems. Design (6) CO-PO AND CO-PSO MAPPING
PO1 PO2 PO3 PO4 PO5 PO6 PO7 PO8 PO9 PO10 PO11 PO12 PSO1 PSO2 PSO3
CO.1 3 2 - 1 - - - - - - - 2 - 2 2 CO.2 2 3 - - - - - - - - - - - - 3 CO.3 - 3 2 - - - - - - - - - 2 - 2 CO.4 - 2 3 2 - - - - - - - - - 3 2 CO.5 - - - - 3 - - - - - - 2 - 2 2 CO.6 1 - - - - - - - - - - - - - -
JUSTIFATIONS FOR CO-PO-PSO MAPPING
MAPPING LOW/MEDIUM
/HIGH JUSTIFICATION
CO.1- PO1 H Knowledge of mathematical modeling for understanding complex control systems by finding their transfer function.
CO.1 – PO2 M Formulate transfer functions from mathematical model to understand control systems better.
CO.1 – PO4 L Interpret transfer function from mathematical models.

S7AEI
COURSE HANDOUT: S7 Page 40
CO.1 –
PO12
M Fundamental knowledge of systems facilitating lifelong learning.
CO.1 – PSO2 M Knowledge of electrical and mechanical systems required for design of instrument systems.
CO.1 – PSO3 M Learn new concepts about linear systems, their properties and models
CO.2 – PO1 M Analysis of transfer function for finding solution to complex control systems
CO.2 – PO2 H Analyze the different responses and steady state errors in control systems.
CO.2 – PSO3 M New concepts in system analysis in time domain CO.3 – PO2 H Analyze stability of systems using principles of mathematics. CO.3 – PO3 M Knowledge of analytical methods for stabilizing unstable systems. CO.3 – PSO1 M Better knowledge of instrument systems by knowing stability issues. CO.3 – PSO3 M New concepts in stability analysis CO.4 – PO2 M Analyze a given system and identify the additional requirement that
can be met with a compensator. CO.4 – PO3 H Design of compensators for meeting specific performance criteria. CO.4 – PO4 M Conduct investigation of current system performance using
frequency domain analysis (Bode plot). CO.4 – PSO2 H Compensator design using RC networks and obtaining their
mathematical models. CO.4 – PSO3 M
Learning concept of compensators and their design.
CO.5 – PO5 H Use of MATLAB for analysis of control systems. CO.5 –
PO12
M Imparting knowledge for making industry ready graduates that enable lifelong learning.
CO.5 – PSO2 M Understanding of universal standard analysis tool like MATLAB CO.5 – PSO3 M Learning of new analysis methods using MATLAB CO.6 – PO1 L Learn the basics of discrete digital control systems
GAPS IN THE SYLLABUS - TO MEET INDUSTRY/PROFESSION REQUIREMENTS: SL
NO DESCRIPTION
PROPOSED
ACTIONS
1 Bilinear transformations Assignment 2 MATLAB in detail, Simulink Web reference[3] PROPOSED ACTIONS: TOPICS BEYOND SYLLABUS/ASSIGNMENT/INDUSTRY VISIT/GUEST LECTURER/NPTEL ETC
TOPICS BEYOND SYLLABUS/ADVANCED TOPICS/DESIGN: 1 Conceptual problems, definitions, to help students in competitive examinations. WEB SOURCE REFERENCES: 1 http://nptel.iitm.ac.in/courses/108101037/ 2 http://nptel.iitm.ac.in/video.php?subjectId=108102043 3 http://nptel.iitm.ac.in/courses/Webcourse-contents/IIT-
Delhi/Control%20system%20design%20n%20principles/index.htm 4 http://nptel.ac.in/courses/108103008/

S7AEI
COURSE HANDOUT: S7 Page 41
DELIVERY/INSTRUCTIONAL METHODOLOGIES: ☐ CHALK & TALK ☐ STUD.
ASSIGNMENT ☐ WEB RESOURCES
☐ LCD/SMART BOARDS
☐ STUD. SEMINARS ☐ ADD-ON COURSES
ASSESSMENT METHODOLOGIES-DIRECT ☐ ASSIGNMENTS ☐ STUD. SEMINARS ☐ TESTS/MODEL
EXAMS ☐ UNIV. EXAMINATION
☐ STUD. LAB PRACTICES
☐ STUD. VIVA ☐ MINI/MAJOR PROJECTS
☐ CERTIFICATIONS
☐ ADD-ON COURSES
☐ OTHERS
ASSESSMENT METHODOLOGIES-INDIRECT ☐ ASSESSMENT OF COURSE OUTCOMES (BY FEEDBACK, ONCE)
☐ STUDENT FEEDBACK ON FACULTY (TWICE)
☐ ASSESSMENT OF MINI/MAJOR PROJECTS BY EXT. EXPERTS
☐ OTHERS
Ms. Aparna S.Babu Ms. Liza Annie Joseph
Prepared by Approved by
Course in charge HoD

S7AEI
COURSE HANDOUT: S7 Page 42
COURSE PLAN
Sl.No Module Planned
Date Planned
1 2 6-Aug-2018 Review Of Z Transform Introduction
2 2 8-Aug-2018 Basic Functions Ztransform
3 2 9-Aug-2018 Inverse Z Transform
4 2 10-Aug-2018 Relationship Between S Plane And Z Transform
5 2 13-Aug-2018 Difference Equation
6 2 16-Aug-2018 Solution By Recursion
7 1 29-Aug-2018
Basic Elements Of Discrete Data Control Systems. Advantages Of Discrete Data Control Systems
8 1 30-Aug-2018 Digital Signals & Coding, Data Conversion & Quantisation
9 1 31-Aug-2018 Sample And Hold, Mathematical Modelling Of Sampling
10 1 3-Sep-2018 Data Reconstruction And Filteringof Sampled Signals
11 1 5-Sep-2018 Zero Order Hold And First Order Hold
12 3 6-Sep-2018 Pulse Transfer Functions
13 3 7-Sep-2018
Z Transform Analysis Of Closed Loop & Open Loop Systems
14 3 17-Sep-2018 Modified Z Transfer Function
15 3 19-Sep-2018 Stability Of Linear Digital Control Systems
16 4 24-Sep-2018 Stability Tests, Steady State Analysis
17 4 26-Sep-2018 Root Locus
18 1 27-Sep-2018 Frequency Domain Analysis
19 4 28-Sep-2018 Bode Plots
20 5 1-Oct-2018
Review Of State Space Techniques To Continuous Data Systems
21 5 3-Oct-2018 State Space Representation Of Discrete Time Systems
22 5 4-Oct-2018 Transfer Function From State Space Model
23 5 5-Oct-2018 Cannonical Forms
24 5 8-Oct-2018 Cannonical Forms Continued
25 5 10-Oct-2018
Conversion Of Transfer Function Model To State Space Model
26 5 11-Oct-2018 Characteristics Equation
27 5 12-Oct-2018 Solution To Discrete State Equations
28 6 15-Oct-2018 Controllabilty And Observability
29 6 17-Oct-2018
Response Between Sampling Instants Using State Variable Approach
30 6 29-Oct-2018 Pole Placement Using State Feedback
S7AEI
COURSE HANDOUT: S7 Page 43
31 6 30-Oct-2018 Pole Placement Techniques Continued
32 6 30-Oct-2018 Pole Placement Techniques
33 6 1-Nov-2018 Dynamic Output Feedback
34 6 2-Nov-2018 Dynamic Output Feedback
35 6 5-Nov-2018 Dynamic Output Feedback
36 6 7-Nov-2018
Effect Of Finite Word Length On Controllability And Closed Loop Pole Placements
37 6 8-Nov-2018
Effect Of Finite Word Length On Controllability And Closed Loop Pole Placements
38 6 9-Nov-2018
Effect Of Finite Word Length On Controllability And Closed Loop Pole Placements

ASSIGNMENT QUESTIONS
1) Find the z transform of 1� ��
2) Find the discrete-time state space representation for the following difference equations:(a) y(k) = 10 y(k-1) + 2 u(k-1) (b) y(k) = 4 y(k-2) – 2 y(k-1) + u(k 3) Give the difference equation that corresponds to the transfer functionY(s)/U(s) = (6 + z)/(z^3 + 4z^2) 4)Show that the following system is not observable:
5)Consider the following matrix:
a) Compute the eigenvalues of Ab) Compute A-1 and its eigenvalues.
c) Form and show the matrices necessary to diagonalize A. d) Compute A4 using the diagonalization from part (c).
ASSIGNMENT QUESTIONS
��� cos �� 2� ���� sin �� time state space representation for the following difference equations:
+ u(k-1)
3) Give the difference equation that corresponds to the transfer function Y(s)/U(s) = (6 + z)/(z^3 + 4z^2)
Show that the following system is not observable:
Consider the following matrix:
Compute the eigenvalues of A and a basis for the eigenspace of each eigenvalue.and its eigenvalues.
c) Form and show the matrices necessary to diagonalize A. using the diagonalization from part (c).
S7AEI
time state space representation for the following difference equations:
and a basis for the eigenspace of each eigenvalue.

S7AEI
COURSE HANDOUT: S7 Page 45
TUTORIAL QUESTIONS
MODULE 1
1. Explain the elements of discrete data control system. 2. What are advantages of discrete data control system? 3. Explain sampling theorem and give a mathematical representation of the same. 4. What do you mean by quantisation? 5. What is a zero order hold?
MODULE 2
1. Derive the relationship between s plane and z plane. 2. Find the z transform of 1� �−�� cos �� 2� �−�� sin �� 3. Find the discrete-time state space representation for the following difference
equations: (a) y(k) = 10 y(k-1) + 2 u(k-1) (b) y(k) = 4 y(k-2) – 2 y(k-1) + u(k-1)
4. Give the difference equation that corresponds to the transfer function Y(s)/U(s) = (6 + z)/(z^3 + 4z^2)
MODULE 3
1. Derive the z transform analysis of an open loop system. 2. Derive the z transform analysis of a closed loop system. 3. Obtain the pulse transfer function G(Z) of the system shown below
Where G(s) is given by
�
���.
4. Find C(Z)/R(Z) for the following closed loop sampled data control systems. Assume all the samplers to be of impulse type.

S7AEI
COURSE HANDOUT: S7 Page 46
MODULE 4
1. Check for stability of the sampled data control systems represented by the following characteristic equation. a) 5�� − 2� + 2 = 0 b) �� − 0.2��0.25� + 0.05 = 0 c) �� − 1.7�� + 1.04�� − 0.268� + 0.024 = 0
2. Explain about steady state error analysis . 3. Sketch the root locus of the following system for three values of sampling
period T: 0.5 sec, 1 sec, and 2 sec. Also determine the critical value of K for each case. And finally locate the closed loop poles corresponding to K=2 for each of the three cases.
4. Consider the digital control system shown in figure. Design a digital
controller in the wplane such that the phase margin is 50°, the gain margin is at least 10 dB, and the static velocity error constant ! is 2 "�#−�. Assume that the sampling period is 0.2sec or T =0.2.
MODULE 5

S7AEI
COURSE HANDOUT: S7 Page 47
9. Define state, state variable, state equation, state trajectory of a system 10. Obtain the time response of the following system
Where u (t) is the unit-step function occurring at t = 0, or
u (t) =1(t) 11. A discrete time system is described by the difference equation,
y(k+2)+5y(k+1)+6y(k)= u(k) y(0) = y(1) = 0 ; T = 1 sec. (a) Determine a state model in canonical form (b) Find the state transition matrix
MODULE 6
1. A system is characterized by the differential equation $�%
$��+ 10
$%
$�+ 7% − & = 0
Determine its transfer function. 2. Obtain the state-transition matrix ∅(�) of the following system
Obtain also the inverse of the state-transition matrix, ∅'��−�
3. Obtain the response y(t) of the following system
Where u (t) is the unit-step input occurring at t = 0, or
u (t) = 1( t )

S7AEI
COURSE HANDOUT: S7 Page 48
AE409
OPTICAL
INSTRUMENTATION

S7AEI
COURSE HANDOUT: S7 Page 49
COURSE INFORMATION SHEET
PROGRAMME: APPLIED ELECTRONICS & INSTRUMENTATION
DEGREE: B. TECH.
COURSE: OPTICAL INSTRUMENTATION SEMESTER: VII CREDITS: 3
COURSE CODE: AE409 REGULATION: 2016
COURSE TYPE: CORE
COURSE AREA/DOMAIN:
INSTRUMENTATION
CONTACT HOURS: 3+1 (Tutorial) hours/Week.
CORRESPONDING LAB COURSE CODE (IF
ANY):
LAB COURSE NAME:
SYLLABUS:
UNIT DETAILS HOURS
I Principle of Optical fiber – Acceptance angle and acceptance cone –Numerical aperture – V-number – Types of optical fibers (Material, Refractive index and mode) – properties- Optical sources-Optical detectors. Optical fiber production and fabrication.
6
II Fibre optic sensors – Fibre optic instrumentation system for measurement of fibre characteristics – Different types of modulators – Interferometric method for measurement of length – Moire fringes – Measurement of pressure, temperature, current, voltage, liquid level and strain – fiber optic gyroscope. Source coupling- Fiber connection-Splicing Techniques.
8
III Interferometers – Fabry – perot and Michelson interferometers – Interference filters – Interferometeric method of measurement – Interference filters – Interferometeric method of measurement of optical components – Optical spectrum analyzer..
7
IV Lasers – Principles of operation – Einstein relations – Population inversion – Optical feedback – laser modes – Classes of laser – Solid state, gas and liquid dye lasers– Semiconductor lasers – Q-switching and mode locking – Properties of laser light.
6
V Laser applications: Laser for measurement of distance, length, atmospheric effect and pollutants-Laser Doppler Anemometry (LDA) - Material processing: Laser heating, Melting, Scribing, Trimming, Welding.
8
VI Medical application of lasers- Laser and Tissue interaction-Laser diagnosis-Laser instruments for microsurgery, Removal of tumors of vocal chords, Brain surgery, dermatology, Oncology and Ophthalmology..
7
TOTAL HOURS 54
S7AEI
COURSE HANDOUT: S7 Page 50
TEXT/REFERENCE BOOKS:
T/R BOOK TITLE/AUTHORS/PUBLICATION
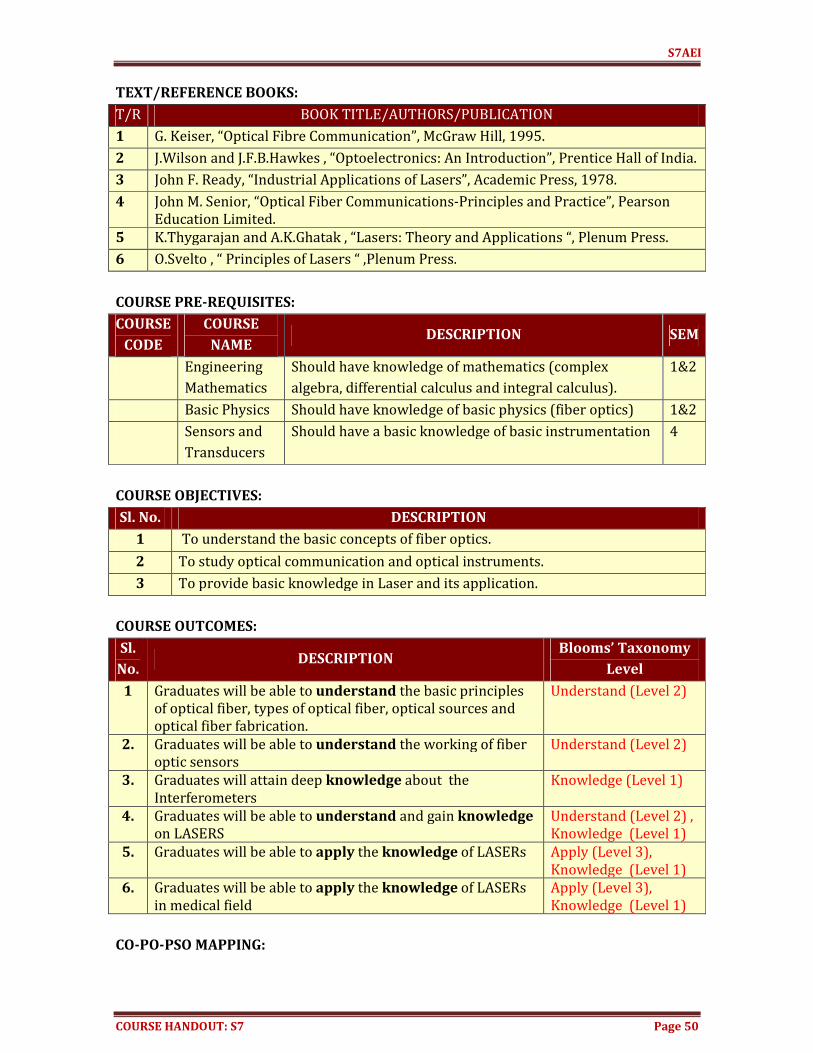
1 G. Keiser, “Optical Fibre Communication”, McGraw Hill, 1995.
2 J.Wilson and J.F.B.Hawkes , “Optoelectronics: An Introduction”, Prentice Hall of India.
3 John F. Ready, “Industrial Applications of Lasers”, Academic Press, 1978.
4 John M. Senior, “Optical Fiber Communications-Principles and Practice”, Pearson Education Limited.
5 K.Thygarajan and A.K.Ghatak , “Lasers: Theory and Applications “, Plenum Press.
6 O.Svelto , “ Principles of Lasers “ ,Plenum Press.
COURSE PRE-REQUISITES:
COURSE
CODE
COURSE
NAME DESCRIPTION SEM
Engineering Mathematics
Should have knowledge of mathematics (complex algebra, differential calculus and integral calculus).
1&2
Basic Physics Should have knowledge of basic physics (fiber optics) 1&2
Sensors and Transducers
Should have a basic knowledge of basic instrumentation 4
COURSE OBJECTIVES:
Sl. No. DESCRIPTION
1 To understand the basic concepts of fiber optics.
2 To study optical communication and optical instruments.
3 To provide basic knowledge in Laser and its application.
COURSE OUTCOMES:
Sl.
No. DESCRIPTION
Blooms’ Taxonomy
Level
1 Graduates will be able to understand the basic principles of optical fiber, types of optical fiber, optical sources and optical fiber fabrication.
Understand (Level 2)
2. Graduates will be able to understand the working of fiber optic sensors
Understand (Level 2)
3. Graduates will attain deep knowledge about the Interferometers
Knowledge (Level 1)
4. Graduates will be able to understand and gain knowledge on LASERS
Understand (Level 2) , Knowledge (Level 1)
5. Graduates will be able to apply the knowledge of LASERs Apply (Level 3), Knowledge (Level 1)
6. Graduates will be able to apply the knowledge of LASERs in medical field
Apply (Level 3), Knowledge (Level 1)
CO-PO-PSO MAPPING:

S7AEI
COURSE HANDOUT: S7 Page 51
PO1 PO2 PO3 PO4 PO5 PO6 PO7 PO8 PO9 PO10 PO11 PO12 PSO1 PSO2 PSO3
CO.1 2 3 3 2 - - - - - - - - 2 - -
CO.2 2 3 3 1 - - - - - - - - 2 - -
CO.3 2 1 2 1 - - - - - - - - 2 2 -
CO.4 2 - - - - - - - - - - - 2 2 -
CO.5 2 - - - - 2 - - - - - - 2 - 2
CO.6 2 - - - - 2 2 - - - - - 2 - 2
JUSTIFATIONS FOR CO-PO-PSO MAPPING
MAPPING LOW/MEDIUM
/HIGH JUSTIFICATION
CO.1- PO1 M Able to understand the basic principles of optical fiber.
CO.1- PO2 H Able to solve problems regarding optical fiber
CO.1- PO3 H Able to provide solutions for optical fiber fabrication
CO.1- PO4 M Able to analyze the working of optical sources
CO.1-PSO1 M Understand the basics of fiber optics
CO.2 – PO1 M Understand the working of fiber optic sensors
CO.2 – PO2 H Understand the basics of fiber optic instrumentation.
CO.2 – PO3 H Able to provide solutions for instrumentation parameters.
CO.2 – PO4 L Able to understand the basics of interferometers
CO.2-PSO1 M Understand the basics of optical instrumentation.
CO.3 – PO1 M Attain basic knowledge on interferometers
CO.3 – PO2 L Analyse different interferometric methods.
CO.3 – PO3 M Study in detail about optical spectrum analyzer.
CO.3 – PO4 L Able to design interference filters
CO.3-PSO1 M Understands the basics of instrumentation
CO.3-PSO2 M Will be capable of developing instrument systems
CO.4 – PO1 M Understand the principles of operation of LASER
CO.4 – PSO1 M Understand the basics of Laser circuits.
CO.5 – PO1 M Able to apply Laser propertiess.
CO.5 – PO6 M Able to apply Laser techniques safely
CO.5 – PSO1 M Understand the basics of LASER
CO.5 – PSO3 M Understand the new concepts of Laser applications
CO.6 – PO1 M Able to apply Laser techniques in medical field.
CO.6 – PO6 M Able to apply Laser Techniques safely.
CO.6 – PSO1 M Understand the basics of Laser application
CO.6 – PSO3 M Able to adapt to changing industrial scenarios in medical field

S7AEI
COURSE HANDOUT: S7 Page 52
GAPS IN THE SYLLABUS - TO MEET INDUSTRY/PROFESSION REQUIREMENTS:
Sl.
No. DESCRIPTION PROPOSED ACTIONS PO MAPPING
1
Mass spectrometry. UV, visible and IR spectrometry. X-ray and nuclear radiation measurements
Assignments,seminars PO11,p012
PROPOSED ACTIONS: TOPICS BEYOND SYLLABUS/ASSIGNMENT/INDUSTRY VISIT/GUEST LECTURER/NPTEL ETC
TOPICS BEYOND SYLLABUS/ADVANCED TOPICS:
Sl. No. DESCRIPTION PO MAPPING
1 HOLOGRAM P011
DESIGN AND ANALYSIS TOPICS:
Sl.
No. DESCRIPTION PO MAPPING
1 Analyze ideal op-amp based circuits using network theorems. 1,2,3,4
2 Steady state and transient analysis of ac circuits 1,2,3,4
3 Analysis of transistor and transformer circuits using two port parameters
1,2,3,4
WEB SOURCE REFERENCES:
Sl. No. DESCRIPTION
1 http://ocw.mit.edu/courses/electrical-engineering-and-computer-science/6-002-circuits-and-electronics-spring-2007/
2 http://en.wikibooks.org/wiki/Circuit_Theory
3 http://nptel.iitm.ac.in/video.php?subjectId=108102042
4 http://opencourses.emu.edu.tr/course/view.php?id=3
5 http://nptel.iitm.ac.in/video.php?subjectId=108102042
DELIVERY/INSTRUCTIONAL METHODOLOGIES:
� CHALK & TALK � STUD. ASSIGNMENT ☐ WEB RESOURCES
☐ LCD/SMART BOARDS ☐ STUD. SEMINARS ☐ ADD-ON COURSES
ASSESSMENT METHODOLOGIES-DIRECT [Append details of assessment methodologies actually
employed (including design and analysis assessment) in spreadsheet format after the completion of each semester]
� ASSIGNMENTS ☐ STUD.
SEMINARS
� TESTS/MODEL EXAMS
� UNIV. EXAMINATION
☐ STUD. LAB PRACTICES ☐ STUD. VIVA ☐ MINI/MAJOR PROJECTS ☐ CERTIFICATIONS
☐ ADD-ON COURSES ☐ OTHERS

S7AEI
COURSE HANDOUT: S7 Page 53
ASSESSMENT METHODOLOGIES-INDIRECT
� ASSESSMENT OF COURSE OUTCOMES (BY FEEDBACK, ONCE)
� STUDENT FEEDBACK ON FACULTY (TWICE)
☐ ASSESSMENT OF MINI/MAJOR PROJECTS
BY EXT. EXPERTS
☐ OTHERS
Prepared by Approved by
Ms. Priya S Ms. Liza Annie Joseph
(Course In-charge) HoD-AEI

S7AEI
COURSE HANDOUT: S7 Page 54
COURSE PLAN
Sl.No Date Module Planned
1 08-Aug-18 1 Principle of Optical fiber 2 10-Aug-18 1 Acceptance angle and acceptance cone 3 13-Aug-18 1 Numerical aperture – V-number 4 29-Aug-18 1 Types of optical fibers (Material, Refractive index and
mode 5 30-Aug-18 1 fiber properties 6 03-Sep-18 1 Optical sources 7 05-Sep-18 1 Optical detectors 8 06-Sep-18 1 Optical fiber production 9 07-Sep-18 2 Fibre optic sensors
10 12-Sep-18 2 Fibre optic instrumentation system for measurement of fibre characteristics
11 13-Sep-18 2 Different types of modulators 12 14-Sep-18 2 Interferometric method for measurement of length 13 24-Sep-18 2 Moire fringes 14 26-Sep-18 2 Measurement of pressure, temperature, current, voltage,
liquid level and strain 15 27-Sep-18 2 fiber optic gyroscope 16 27-Sep-18 2 Source coupling- Fiber connection 17 28-Sep-18 2 Splicing Techniques 18 01-Oct-18 3 Interferometers – Fabry – perot and Michelson
interferometers 19 03-Oct-18 3 Interference filters 20 04-Oct-18 3 Interferometeric method of measurement 21 05-Oct-18 3 Interference filters 22 08-Oct-18 3 Interferometeric method of measurement of optical
components 23 10-Oct-18 3 Optical spectrum analyzer 24 12-Oct-18 4 Lasers – Principles of operation 25 15-Oct-18 4 Einstein relations – Population inversion 26 17-Oct-18 4 Optical feedback – laser modes 27 22-Oct-18 4 Classes of laser – Solid state, gas and liquid dye lasers 28 24-Oct-18 4 Semiconductor lasers – Q-switching and mode locking
29 29-Oct-18 4 –Properties of laser light. 30 29-Oct-18 5 Laser applications: Laser for measurement of distance,
length 31 30-Oct-18 5 atmospheric effect and pollutants 32 31-Oct-18 5 atmospheric effect and pollutants 33 01-Nov-18 5 Laser Doppler Anemometry (LDA) 34 02-Nov-18 5 Material processing: Laser heating, Melting 35 05-Nov-18 5 Scribing, Trimming, Welding 36 07-Nov-18 6 Medical application of lasers 37 08-Nov-18 6 Laser and Tissue interaction
S7AEI
COURSE HANDOUT: S7 Page 55
38 09-Nov-18 6 Laser diagnosis 39 12-Nov-18 6 Laser instruments for microsurgery 40 14-Nov-18 6 Removal of tumors of vocal chords 41 15-Nov-18 6 Brain surgery 42 16-Nov-18 6 dermatology 43 19-Nov-18 6 Oncology 44 21-Nov-18 6 Ophthalmology 45 22-Nov-18 6 general discussion on application of LASERS 46 23-Nov-18 1 REVISION 47 26-Nov-18 2 REVISION 48 28-Nov-18 3 REVISION 49 28-Nov-18 4 REVISION 50 29-Nov-18 5 REVISION 51 29-Nov-18 6 REVISION
S7AEI
COURSE HANDOUT: S7 Page 56
ASSIGNMENT QUESTIONS
ASSIGNMENT 1
1. Write in detail about Optical fiber production and fabrication. 2. Explain about the different Splicing Techniques in fiber optics
ASSIGNMENT 2
Explain the applications of LASER :
1. Laser heating, 2. Melting, 3. Scribing, 4. Trimming, 5. Welding

S7AEI
COURSE HANDOUT: S7 Page 57
ELECTIVE
AE463 Aerospace and
Navigation
Instruments

S7AEI
COURSE HANDOUT: S7 Page 58
COURSE INFORMATION SHEET
PROGRAMME: Applied Electronics and
Instrumentation Engg.
DEGREE: BTECH
COURSE: Aerospace and Navigation
Instruments
SEMESTER: S7 CREDITS: 3
COURSE CODE: AE 463
REGULATION: 2016
COURSE TYPE: CORE /ELECTIVE / BREADTH/ S&H
COURSE AREA/DOMAIN:
Instrumentation
CONTACT HOURS: 3hours/week.
CORRESPONDING LAB COURSE CODE (IF
ANY): nil
LAB COURSE NAME:nA
SYLLABUS:
UNIT DETAILS HOURS
I
History of aviation and space flight- anatomy of airplane and space vehicle with emphasis on control surfaces- airfoil nomenclature- basics of aerodynamics to illustrate lift and drag- types of drag – finite wings – swept wings –flaps.
6
II
Airplane performance- thrust –power- rate of climb absolute and service ceiling- range and endurance. Introduction to turbojet and turbofan engines. Space vehicle trajectories- Kepler’s laws- rocket engines, propellants and staging. (Introductory treatment of the above topics is only expected, no detailed derivations)
8
III Basic engine instruments- Capacitive fuel content- Gauges. Standard atmosphere- Altimeters Aneroid and radioaltimeters.
6
IV Aircraft compass- Remote indicating magnetic compass- Rate of climb indicator- Pitot static system- Air speed indicator- Mach meters- Integrated flight instruments
6
V
GPS and GNSS, - Automatic Pilots- Aircraft flight simulation instrumentation Introduction to guidance, navigation and avionics- Radio navigational aids- automatic direction finder VHF- Phase- Comparison direction finder.
8
VI
Introduction to navigation and guidance instrumentation- Principle, construction and applications of inertial sensors- Gyroscope and accelerometers- Ring laser gyroscope- Fibre optic gyroscope, MEMS gyroscopes and accelerometers.
8
TOTAL HOURS 40 h
TEXT/REFERENCE BOOKS:
T/R BOOK TITLE/AUTHORS/PUBLICATION
1 Nagaraja.M.S, Elements of electronic navigation, Tata McGraw Hill.
S7AEI
COURSE HANDOUT: S7 Page 59
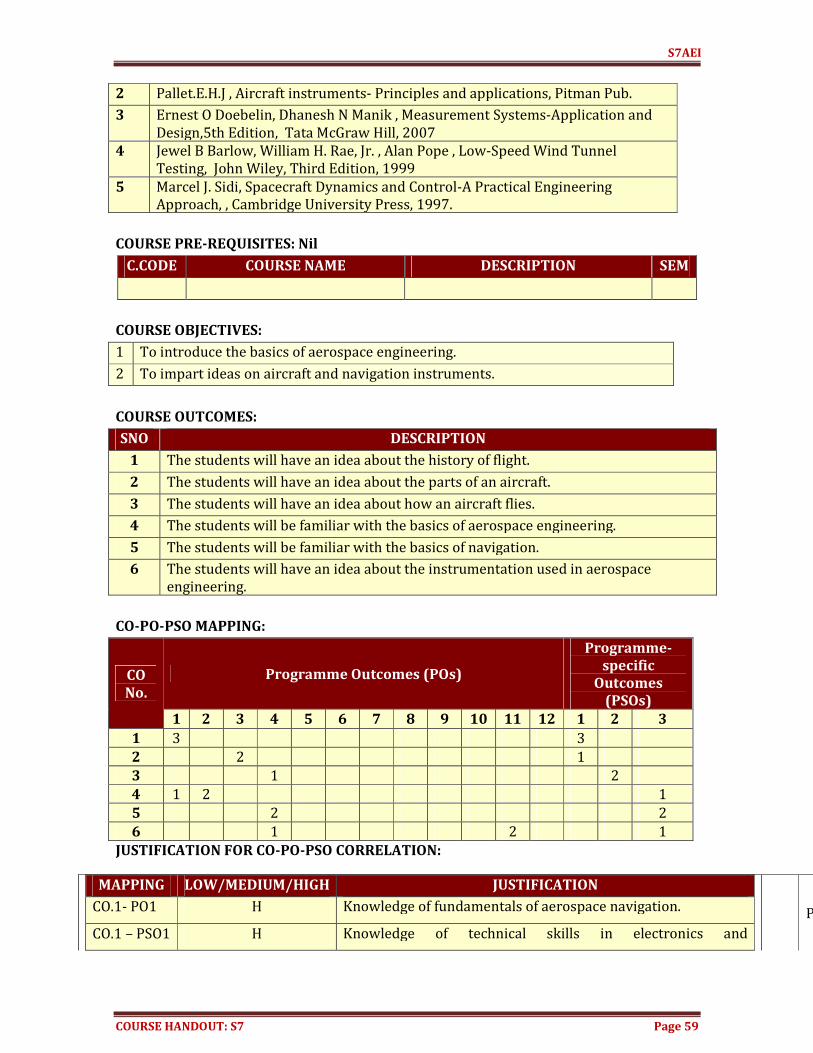
2 Pallet.E.H.J , Aircraft instruments- Principles and applications, Pitman Pub.
3 Ernest O Doebelin, Dhanesh N Manik , Measurement Systems-Application and Design,5th Edition, Tata McGraw Hill, 2007
4 Jewel B Barlow, William H. Rae, Jr. , Alan Pope , Low-Speed Wind Tunnel Testing, John Wiley, Third Edition, 1999
5 Marcel J. Sidi, Spacecraft Dynamics and Control-A Practical Engineering Approach, , Cambridge University Press, 1997.
COURSE PRE-REQUISITES: Nil
C.CODE COURSE NAME DESCRIPTION SEM
COURSE OBJECTIVES:
1 To introduce the basics of aerospace engineering.
2 To impart ideas on aircraft and navigation instruments.
COURSE OUTCOMES:
SNO DESCRIPTION
1 The students will have an idea about the history of flight.
2 The students will have an idea about the parts of an aircraft.
3 The students will have an idea about how an aircraft flies.
4 The students will be familiar with the basics of aerospace engineering.
5 The students will be familiar with the basics of navigation.
6 The students will have an idea about the instrumentation used in aerospace engineering.
CO-PO-PSO MAPPING:
CO
No.
Programme Outcomes (POs)
Programme-
specific
Outcomes
(PSOs)
1 2 3 4 5 6 7 8 9 10 11 12 1 2 3
1 3 3 2 2 1 3 1 2 4 1 2 1 5 2 2 6 1 2 1
JUSTIFICATION FOR CO-PO-PSO CORRELATION:
MAPPING LOW/MEDIUM/HIGH JUSTIFICATION
CO.1- PO1 H Knowledge of fundamentals of aerospace navigation.
CO.1 – PSO1 H Knowledge of technical skills in electronics and
PO6

S7AEI
COURSE HANDOUT: S7 Page 60
Industrial relevance of the subject
No direct relevance. But, like many other subjects, would help to develop analytical skills, specifically related to aerospace and navigation. It could form a base from where directly applicable knowledge could be developed.
GAPS IN THE SYLLABUS - TO MEET INDUSTRY/PROFESSION REQUIREMENTS: Nil
SNO DESCRIPTION PROPOSED ACTIONS
PROPOSED ACTIONS:
TOPICS BEYOND SYLLABUS/ADVANCED TOPICS/DESIGN:
S No: DESCRIPTION PO MAPPING
DESIGN AND ANALYSIS TOPICS:
instrumentation.
CO.2 – PO3 M Formulate idea and mathematical model for designing aircraft
parts.
CO.2 – PSO1 L Learn new concepts about aircraft, their properties and
models.
CO.3 – PO4 L Define procedure for aircraft navigation.
CO.3 – PSO2 M Better knowledge of navigation concept and analysis.
CO.4 – PO1 L Develop basic knowledge of aircraft and its practical designing
techniques.
CO.4 – PO2 M Problem finding and detailed analysis skill development.
CO.4 – PSO3 L Better understanding of navigation system and its challenging industrial facts.
CO.5– PO4 M Develop ability to understand the concept and arrive at valid conclusions.
CO.5 – PSO3 M Understanding of navigation designing tools if any, and familiarizes the practical systems.
CO.6 – PO4 L Thorough learning and application of instrumentation in aerospace technology.
CO.6 – PO11
M Understanding of engineering principles and team management.
CO.6 – PSO3 L Knowledge about industrial applications and challenges.

S7AEI
COURSE HANDOUT: S7 Page 61
Sl. No. DESCRIPTION PO MAPPING
WEB SOURCE REFERENCES:
1 https://www.skybrary.aero/index.php/Aerofoil
2 http://aviationknowledge.wikidot.com/aviation:aerofoil
3 https://www.decodedscience.org/slats-slots-and-spoilers-lift-modifying-devices-on-airplane-wings/12105
4 file:///E:/KTU/Aerospace&Navigation/Module1/axes_control_surfaces.pdf
5 https://www.britannica.com/technology/history-of-flight
6 https://www.aiaa.org/SecondaryTwoColumn.aspx?id=3014
7 http://www.aerospace.org/education/stem-outreach/space-primer/a-brief-history-of-space-exploration/
DELIVERY/INSTRUCTIONAL METHODOLOGIES:
☑ CHALK & TALK ☑ STUD. ASSIGNMENT ☑PPT/LCD projection
☐ LCD/SMART BOARDS STUD. SEMINARS ☐ ADD-ON COURSES
ASSESSMENT METHODOLOGIES-DIRECT
☑ ASSIGNMENTS ☑STUD. SEMINARS ☑ TESTS/MODEL
EXAMS
☑ UNIV.
EXAMINATION
☐ STUD. LAB
PRACTICES
☐ STUD. VIVA ☐ MINI/MAJOR
PROJECTS
☐ CERTIFICATIONS
☐ ADD-ON
COURSES
☐ OTHERS
ASSESSMENT METHODOLOGIES-INDIRECT
☑ ASSESSMENT OF COURSE OUTCOMES (BY
FEEDBACK, ONCE)
STUDENT FEEDBACK ON FACULTY
☐ ASSESSMENT OF MINI/MAJOR PROJECTS
BY EXT. EXPERTS
☐ OTHERS
Prepared by Approved by
S7AEI
COURSE HANDOUT: S7 Page 62
P. R. Madhava Panicker Liza Annie Joseph
(Course Incharge) (HOD)
S7AEI
COURSE HANDOUT: S7 Page 63
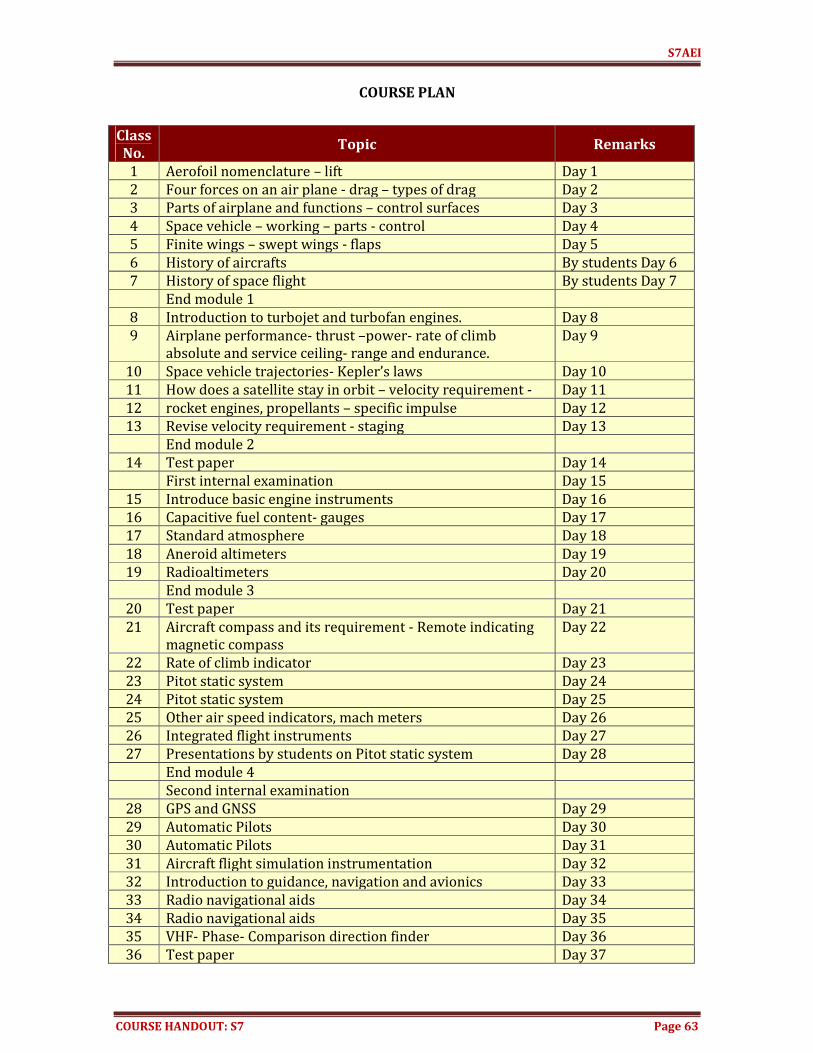
COURSE PLAN
Class
No. Topic Remarks
1 Aerofoil nomenclature – lift Day 1 2 Four forces on an air plane - drag – types of drag Day 2 3 Parts of airplane and functions – control surfaces Day 3
4 Space vehicle – working – parts - control Day 4
5 Finite wings – swept wings - flaps Day 5
6 History of aircrafts By students Day 6 7 History of space flight By students Day 7 End module 1
8 Introduction to turbojet and turbofan engines. Day 8
9 Airplane performance- thrust –power- rate of climb absolute and service ceiling- range and endurance.
Day 9
10 Space vehicle trajectories- Kepler’s laws Day 10
11 How does a satellite stay in orbit – velocity requirement - Day 11
12 rocket engines, propellants – specific impulse Day 12
13 Revise velocity requirement - staging Day 13
End module 2
14 Test paper Day 14
First internal examination Day 15
15 Introduce basic engine instruments Day 16
16 Capacitive fuel content- gauges Day 17
17 Standard atmosphere Day 18
18 Aneroid altimeters Day 19
19 Radioaltimeters Day 20
End module 3
20 Test paper Day 21
21 Aircraft compass and its requirement - Remote indicating magnetic compass
Day 22
22 Rate of climb indicator Day 23
23 Pitot static system Day 24
24 Pitot static system Day 25
25 Other air speed indicators, mach meters Day 26
26 Integrated flight instruments Day 27
27 Presentations by students on Pitot static system Day 28
End module 4
Second internal examination
28 GPS and GNSS Day 29
29 Automatic Pilots Day 30
30 Automatic Pilots Day 31
31 Aircraft flight simulation instrumentation Day 32
32 Introduction to guidance, navigation and avionics Day 33
33 Radio navigational aids Day 34
34 Radio navigational aids Day 35
35 VHF- Phase- Comparison direction finder Day 36
36 Test paper Day 37

S7AEI
COURSE HANDOUT: S7 Page 64
End module 5
37 Gyroscope: principle, construction and applications Day 38
38 Ring laser gyroscope Day 39
39 Fibre optic gyroscope Day 40
40 MEMS gyroscopes Day 41
41 Accelerometers Day 42
42 MEMs accelerometers Day 43
43 Test paper Day 44
End module 6

S7AEI
COURSE HANDOUT: S7 Page 65
ASSIGNMENT
I. 1. With a neat sketch of an aerofoil give the meaning of the following terms: leading edge, trailing edge, chord, mean camber line, maximum camber. 2. How does an aerofoil generate lift? 3. Which are the four forces acting on an airplane? Explain the meaning of each one.
II. 1. Explain how winglets can reduce induced drag. 2. Which altimeter should a pilot prefer to use during landing, pressure altimeter or radio altimeter? Justify your answer. 3. Explain the technique used in radio altimeter.
III. 1. Which are the four forces acting on an airplane? Explain the meaning of each one. 2. What is induced drag? How is it produced? 3. How is the absolute height measurement done using a radio altimeter?
IV. 1. Explain the working of turbojet engine. 2. Compare range and endurance. How does drag affect range? 3. Explain the need for reference to standard atmosphere in an aneroid altimeter. 4. What are the major causes of error in a pressure altimeter? 5. Explain the working of radio altimeter.
V. 1. Explain the meaning of aerodynamic stall. 2. What is spoiler? What is its function? Explain how it works. 3. How is absolute height measurement done using a radio altimeter?
VI. 1. With a neat sketch explain the meaning of angle of attack. 2. Which are the main control surfaces in an airplane? Explain the function of each one.
VII. 1. With neat sketches explain the working of an aneroid altimeter. 2. What is the need for using more than one metal capsule in an altimeter? 3. What are the major causes of error in a pressure altimeter?
VIII. 1. Which are the main control surfaces in an airplane? Explain the function of each one. 2. Using appropriate block diagram explain the working of a radio altimeter.
IX. 1. Making use of suitable diagrams explain the working of capacitance type fuel gauge used in aircraft. 2. Explain the working of radio altimeter. Explain how loop antenna works as directional antenna.
X. 1. On a neat sketch, show the parts of an airplane and explain their functions. 2. Explain how winglets can reduce induced drag. 3. Making use of suitable diagrams explain the working of capacitance type fuel gauge used in aircraft.
XI. 1. What are slats? Explain their function. 2. Making use of suitable diagrams explain the working of capacitance type fuel gauge used in aircraft.
S7AEI
COURSE HANDOUT: S7 Page 66
AE451
Seminar &
Project
Preliminary

S7AEI
COURSE HANDOUT: S7 Page 67
COURSE INFORMATION SHEET
PROGRAMME: APPLIED ELECTRONICS AND
INSTRUMENTATION DEGREE: BTECH
COURSE: Seminar & Project Preliminary SEMESTER: 7 CREDITS: 2
COURSE CODE: AE451 REGULATION: 2016
COURSE TYPE: CORE
COURSE AREA/DOMAIN: PROJECT CONTACT HOURS: 1+4 (Tutorial) hours/Week.
CORRESPONDING LAB COURSE CODE (IF ANY): NIL
LAB COURSE NAME: NIL
SYLLABUS:
UNIT DETAILS HOURS
Seminar: Each student shall identify a topic of current relevance in his/her branch of engineering, get approval of faculty concerned, collect sufficient literature on the topic, study it thoroughly, prepare own report and present in the class. Project preliminary: Identify suitable project relevant to the branch of study. Form project team ( not exceeding four students). The students can do the project individually also. Identify a project supervisor. Present the project proposal before the assessment board (excluding the external expert) and get it approved by the board. The preliminary work to be completed: (1) Literature survey (2) Formulation of objectives (3) Formulation of hypothesis/design/methodology (4) Formulation of work plan (5) Seeking funds (6) Preparation of preliminary report Note: The same project should be continued in the eighth semester by the same project team.
12
TOTAL HOURS 38
TEXT/REFERENCE BOOKS:
T/R BOOK TITLE/AUTHORS/PUBLICATION
R Michael Luchs, Scott Swan, Abbie Griffin, 2015. Design Thinking. 405 pages, John Wiley & Sons, Inc
COURSE PRE-REQUISITES:
C.CODE COURSE NAME DESCRIPTION SEM
AI010 305 Analog Circuits – I RC circuits and their response 3
EC 211 Electronics-Circuits-Lab 3
EC 207 Logic-Circuit-Design 3

S7AEI
COURSE HANDOUT: S7 Page 68
COURSE OBJECTIVES:
1 To develop skills in doing literature survey, technical presentation and report preparation.
2 To enable project identification and execution of preliminary works on final semester project
COURSE OUTCOMES:
Sl.
No. DESCRIPTION
Bloom’s Taxonomy
Levels
1 The students will be able to think innovatively and present a technical topic
on the basics of the project.
Knowledge & Understand (1 & 2)
2 The students will be able to analyse the problems for their main
project and arrive workable design solutions Understand & Analyze (2 & 4)
CO-PO AND CO-PSO MAPPING
PO1 PO2 PO3 PO4 PO5 PO6 PO7 PO8 PO9 PO10 PO11 PO12 PSO1 PSO2 PSO3
CO.1 3 2 - 1 - - - - - - - 2 - 2 2
CO.2 2 3 - - - - - - - - - - - - 3
JUSTIFATIONS FOR CO-PO-PSO MAPPING
MAPPING LOW/MEDIUM
/HIGH JUSTIFICATION
CO.1- PO1 H Analyze the circuit before implementation.
CO.1 – PO2 M With the acquired fundamental knowledge the theory is understood.
CO.1 – PO4 L New concepts are learnt during practical implementation.
CO.1 –
PO12 M The importance to function as teams is understood.
CO.1 – PSO2 M Project management is efficiently done.
CO.1 – PSO3 M Methods of designing the experiments are understood clearly.
CO.2 – PO1 M To build the PCB layout and to simulate the circuits many modern
tools are identified and familiarized.
CO.2 – PO2 H Methods of simulation and developing the device are utilized
appropriately.
CO.2 – PSO3 M Various analysis and synthesis methods are being handled to solve the

S7AEI
COURSE HANDOUT: S7 Page 69
practical problems.
GAPS IN THE SYLLABUS - TO MEET INDUSTRY/PROFESSION REQUIREMENTS:
SNO DESCRIPTION PROPOSED
ACTIONS Relevance
with POs Relevance
with PSOs
1 Knowledge on PCB fab Extra classes given ORCAD etc 5 3 PROPOSED ACTIONS: TOPICS BEYOND SYLLABUS/ASSIGNMENT/INDUSTRY VISIT/GUEST LECTURER/NPTEL ETC
TOPICS BEYOND SYLLABUS/ADVANCED TOPICS/DESIGN:
SNO DESCRIPTION PROPOSED
ACTIONS Relevance
with POs Relevance
with PSOs
1 Introduced microcontrollers, PLC ,instrumentation systems etc for the students
Reading materials to be suggested
1 1
2 Given courses on orcad , Project management etc
Micro projects 3, 5,11,10 3
3 Given introductory courses on robotics, PSPICE, Matlab, Labview etc
Short term course
5 3
WEB SOURCE REFERENCES:
1 www.howstuffworks.com
2 www.engineering toolbox.com
3 www.ni.com
4 www.edn.com
5 www.microcontrollers.com
6 www.orcad.com
DELIVERY/INSTRUCTIONAL METHODOLOGIES:
√CHALK & TALK √ STUD. ASSIGNMENT
√WEB RESOURCES
√ LCD/SMART
BOARDS √ STUD. SEMINARS √ ADD-ON COURSES
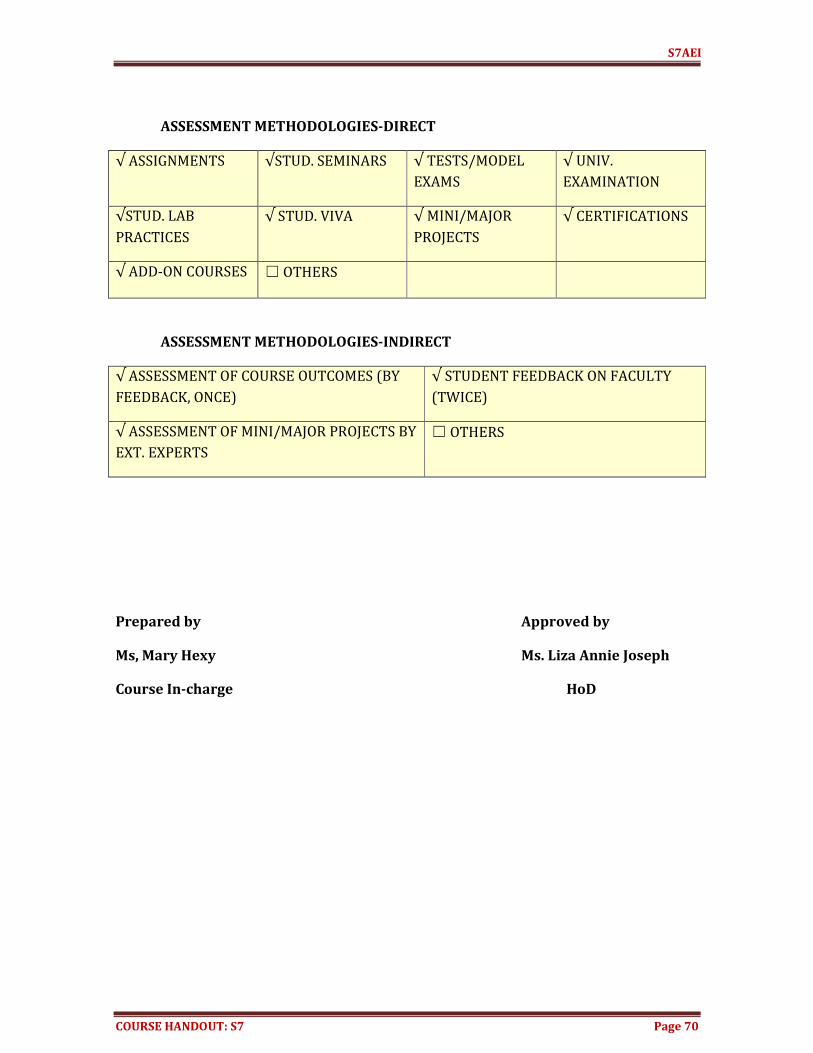
S7AEI
COURSE HANDOUT: S7 Page 70
ASSESSMENT METHODOLOGIES-DIRECT
√ ASSIGNMENTS √STUD. SEMINARS √ TESTS/MODEL EXAMS
√ UNIV. EXAMINATION
√STUD. LAB
PRACTICES √ STUD. VIVA √ MINI/MAJOR
PROJECTS √ CERTIFICATIONS
√ ADD-ON COURSES ☐ OTHERS
ASSESSMENT METHODOLOGIES-INDIRECT
√ ASSESSMENT OF COURSE OUTCOMES (BY FEEDBACK, ONCE)
√ STUDENT FEEDBACK ON FACULTY (TWICE)
√ ASSESSMENT OF MINI/MAJOR PROJECTS BY EXT. EXPERTS
☐ OTHERS
Prepared by Approved by
Ms, Mary Hexy Ms. Liza Annie Joseph
Course In-charge HoD

S7AEI
COURSE HANDOUT: S7 Page 71
SEMINAR EVALUATION SCHEDULE
Sl
No: Date Reg.No: Name
1
09-11-18
RET15AE012 JINSHA BABU GEORGE 2 RET15AE003 AMIT K ANTONY
3 RET15AE047 SHYAMMOHAN S 4
13/09/2018
RET15AE009 ABY D KAITHARAN 5 RET15AE021 JACOB ROBERT 6 RET15AE008 ALPHIN G THOMAS 7 RET15AE029 ADWAITH BAIJU 8
14/09/2018 RET15AE024 ANKITA NAMBIAR
9 RET15AE023 K A M ABDUL AZEEM 10
25/09/2018 RET15AE052 SERENE THERESA JOSEPH
11 RET15AE028 JENIN KOSHY 12 RET15AE036 NAVIN SATHEESAN 13
27/09/2018 RET15AE043 VISHNU A
14 RET15AE010 ANAND RAGHUNATHAN 15 RET15AE042 SANJU SHAJI 16
28/09/2018 RET15AE050 T ADARSH VIJAY
17 RET15AE035 MUHIYIDEEN SHA C R 18
10-04-18 RET15AE001 ANANTHU V BABU
19 RET15AE025 VISHNU V 20 RET15AE032 LIBIN GEORGE 21
10-05-18 RET15AE011 AAKASH U R
22 RET15AE053 JOSE K MAJU 23
10-09-18
RET15AE019 BASIL VARGHESE 24 RET15AE022 JOSEPH CHACKO 25 RET15AE016 CLINT KUNDUKULANGARA
VARGHESE 26
10-11-18 RET15AE026 JEES V THARAYIL
27 RET15AE015 ELDHOSE ABRAHAM ROJI 28 RET15AE045 SHINJU ABRAHAM SAJI 29
10-12-18 RET15AE006 AROMAL S P
30 RET15AE030 PREETHI S R 31
16/10/2018 RET15AE041 SANGEETHA BOBIN
32 RET15AE014 KIRAN RAJIV 33 RET15AE038 KIRAN A MANOJ 34
30/10/2018
RET15AE020 MOHAMMED FASIL YUSUF HAMZA
35 RET15AE017 DANIEL CLEMANT 36 RET15AE033 MANU SHAJI 37
11-01-18 RET15AE037 P S ARJUN
38 RET15AE031 KURIAN JOSEPH JOHN

S7AEI
COURSE HANDOUT: S7 Page 72
39 RET15AE034 HEMA KEERTHANA SURESH 40
11-02-18 RET15AE018 SHANE TERBY GEORGE
41 RET15AE013 JOSEPH ROMEL LUIZ 42
11-08-18 RET15AE044 EDWIN ANTONY JOE
43 RET15AE051 T S SUVARNA UNNI 44 RET15AE027 ANUDEEP K V 45
11-09-18 RET15AE040 SRINATH NAIR
46 RET15AE004 ADARSH KRISHNAJI 47 RET15AE046 ADARSH THARIYAN PAUL 48
13/11/2018 RET15AE048 RITHVICK ABRAHAM RAJESH
49 RET15AE049 SUDEEPTHA M S 50 RET15AE005 SHREYA RAMACHANDRAN

S7AEI
COURSE HANDOUT: S7 Page 73
AE431
Control System &
Signal Processing
Lab
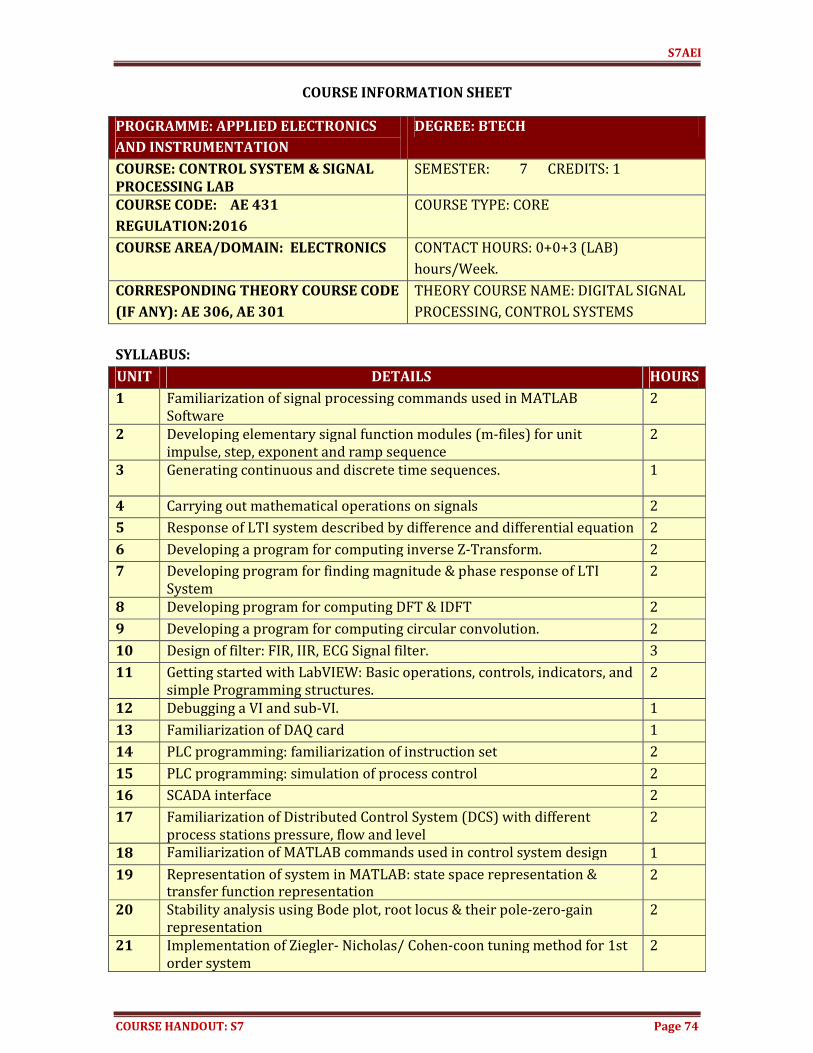
S7AEI
COURSE HANDOUT: S7 Page 74
COURSE INFORMATION SHEET
PROGRAMME: APPLIED ELECTRONICS
AND INSTRUMENTATION
DEGREE: BTECH
COURSE: CONTROL SYSTEM & SIGNAL
PROCESSING LAB
SEMESTER: 7 CREDITS: 1
COURSE CODE: AE 431
REGULATION:2016
COURSE TYPE: CORE
COURSE AREA/DOMAIN: ELECTRONICS CONTACT HOURS: 0+0+3 (LAB) hours/Week.
CORRESPONDING THEORY COURSE CODE
(IF ANY): AE 306, AE 301
THEORY COURSE NAME: DIGITAL SIGNAL PROCESSING, CONTROL SYSTEMS
SYLLABUS:
UNIT DETAILS HOURS
1 Familiarization of signal processing commands used in MATLAB Software
2
2 Developing elementary signal function modules (m-files) for unit impulse, step, exponent and ramp sequence
2
3 Generating continuous and discrete time sequences.
1
4 Carrying out mathematical operations on signals 2
5 Response of LTI system described by difference and differential equation 2
6 Developing a program for computing inverse Z-Transform. 2
7 Developing program for finding magnitude & phase response of LTI System
2
8 Developing program for computing DFT & IDFT 2
9 Developing a program for computing circular convolution. 2
10 Design of filter: FIR, IIR, ECG Signal filter. 3
11 Getting started with LabVIEW: Basic operations, controls, indicators, and simple Programming structures.
2
12 Debugging a VI and sub-VI. 1
13 Familiarization of DAQ card 1
14 PLC programming: familiarization of instruction set 2
15 PLC programming: simulation of process control 2
16 SCADA interface 2
17 Familiarization of Distributed Control System (DCS) with different process stations pressure, flow and level
2
18 Familiarization of MATLAB commands used in control system design 1
19 Representation of system in MATLAB: state space representation & transfer function representation
2
20 Stability analysis using Bode plot, root locus & their pole-zero-gain representation
2
21 Implementation of Ziegler- Nicholas/ Cohen-coon tuning method for 1st order system
2
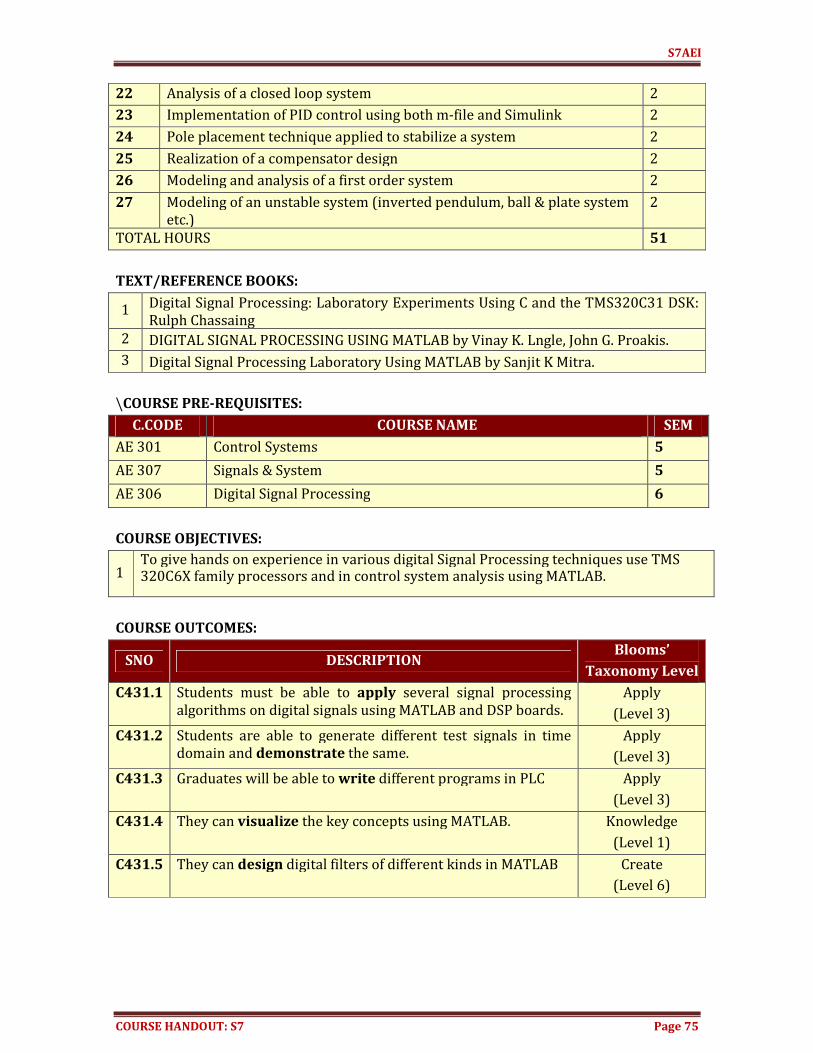
S7AEI
COURSE HANDOUT: S7 Page 75
22 Analysis of a closed loop system 2
23 Implementation of PID control using both m-file and Simulink 2
24 Pole placement technique applied to stabilize a system 2
25 Realization of a compensator design 2
26 Modeling and analysis of a first order system 2
27 Modeling of an unstable system (inverted pendulum, ball & plate system etc.)
2
TOTAL HOURS 51
TEXT/REFERENCE BOOKS:
1 Digital Signal Processing: Laboratory Experiments Using C and the TMS320C31 DSK: Rulph Chassaing
2 DIGITAL SIGNAL PROCESSING USING MATLAB by Vinay K. Lngle, John G. Proakis. 3 Digital Signal Processing Laboratory Using MATLAB by Sanjit K Mitra.
\COURSE PRE-REQUISITES:
C.CODE COURSE NAME SEM
AE 301 Control Systems 5
AE 307 Signals & System 5
AE 306 Digital Signal Processing 6
COURSE OBJECTIVES:
1 To give hands on experience in various digital Signal Processing techniques use TMS 320C6X family processors and in control system analysis using MATLAB.
COURSE OUTCOMES:
SNO DESCRIPTION Blooms’
Taxonomy Level
C431.1 Students must be able to apply several signal processing algorithms on digital signals using MATLAB and DSP boards.
Apply (Level 3)
C431.2 Students are able to generate different test signals in time domain and demonstrate the same.
Apply (Level 3)
C431.3 Graduates will be able to write different programs in PLC Apply (Level 3)
C431.4 They can visualize the key concepts using MATLAB. Knowledge (Level 1)
C431.5 They can design digital filters of different kinds in MATLAB Create (Level 6)

S7AEI
COURSE HANDOUT: S7 Page 76
CO – PO and CO – PSO mapping
PO1 PO2 PO3 PO4 PO5 PO6 PO7 PO8 PO9 PO10 PO11 PO12 PSO1 PSO2 PSO3
C431.1 2 - - - 3 - - - - - - 2 - - 2
C431.2 2 - - - 3 - - - - - - 2 - - 2
C431.3 3 2 2 - 3 - - - - - - 3 2 - 3
C431.4 3 - 2 - 3 - - - - - - 3 2 2 2
C431.5 3 2 3 - 3 - - - - - - 3 2 3 3
Justification
Course Outcome Justification
C431.1 – PO1 Knowledge of mathematics and science are required for the implementation of signal processing algorithms.
C431.1 – PO5 Familiarization of Matlab is achieved.
C431.1 – PO12 The algorithms implemented in Matlab would form the basis for developing many complicated signal processing algorithms.
C431.1 – PSO3 The new concepts studied and implemented forms the basis for many signal processing algorithms.
C431.2 – PO1 Knowledge of mathematics and engineering fundamentals are required.
C431.2 – PO5 Familiarization of Matlab is achieved.
C431.2 – PO12 The signals generated could be used as input for many signal processing applications.
C431.2 – PSO3 Introduction to new concepts.
C431.3 – PO1 Knowledge of mathematics and engineering fundamentals are required.
C431.3 – PO2 Usage of first principles of mathematics required for program formulation.
C431.3 – PO3 Design of PLC ladder diagrams.
C431.3 – PO5 Familiarization of PLC programming
C431.3 – PO12 PLC programming skill can be used in future
C431.3 – PSO1 Technical skills are required for PLC programming.
C431.3 – PSO3 The new concept of PLC programming may be well understood through implementation.
C431.4 – PO1 Knowledge of mathematics and engineering fundamentals are required.
C431.4 – PO3 Sampling and reconstruction of signals from the samples could form the initial steps for designing many signal processing applications.
C431.4 – PO5 Familiarization of Matlab is achieved. C431.4 – PO12 Sampling and reconstruction of signals from the samples could be used for
many applications. C431.4 – PS01 Samples and reconstruction of signals from the samples require technical
skills. C431.4 – PS02 Several signal processing applications would require the signals to be
sampled. C431.4 – PS03 The concept of sampling and reconstruction may be well understood
through the experiment. C431.5 – PO1 Engineering knowledge is required for designing filters.

S7AEI
COURSE HANDOUT: S7 Page 77
C431.5 – PO2 Design and implementation of IIR and FIR filters can be considered as a complex designing problem.
C431.5 – PO3 The digital filters can form an important unit of several signal processing applications.
C431.5 – PO5 Familiarization of Matlab is achieved. C431.5 – PO12 Filters can form an integral part of many real time systems. C431.5 – PSO1 Technical and engineering skills are required for the design of filters. C431.5 – PSO2 The experience of designing filters would help in designing many real time
systems for signal processing. C431.5 – PSO3 New concepts of filtering may be well understood.
GAPES IN THE SYLLABUS - TO MEET INDUSTRY/PROFESSION REQUIREMENTS:
SNO DESCRIPTION PROPOSED
ACTIONS
RELEVANCE
WITH POs
RELEVANCE
WITH PSOs
1 Linear Convolution, modulation techniques
Giving extra lab classes
PO1, PO2 PSO3
PROPOSED ACTIONS: TOPICS BEYOND SYLLABUS/ASSIGNMENT/INDUSTRY VISIT/GUEST LECTURER/NPTEL ETC
TOPICS BEYOND SYLLABUS/ADVANCED TOPICS/DESIGN:
SNO DESCRIPTION PROPOSED
ACTIONS
RELEVANCE WITH
POs
RELEVANCE
WITH PSOs
1 Study of OMAP L138 Development kit
Extra Lab PO1, PO2 PSO1, PSO3
WEB SOURCE REFERENCES:
1 http://media.sakshat.ac.in/NPTEL-IIT-Videos/default.aspx
2 rtsp:// 192.168.14.131/nptel_phase1/ece/subject_code/lect_no.mp4
DELIVERY/INSTRUCTIONAL METHODOLOGIES:
☐ CHALK & TALK ☐ STUD. ASSIGNMENT ☐ WEB RESOURCES ☐ LCD/SMART
BOARDS
☐ STUD. SEMINARS ☐ ADD-ON COURSES
ASSESSMENT METHODOLOGIES-DIRECT
☐ ASSIGNMENTS ☐ STUD. SEMINARS ☐ TESTS/MODEL
EXAMS
☐ UNIV.
EXAMINATION
☐ STUD. LAB
PRACTICES
☐ STUD. VIVA ☐ MINI/MAJOR
PROJECTS
☐ CERTIFICATIONS
☐ ADD-ON ☐ OTHERS
S7AEI
COURSE HANDOUT: S7 Page 78
COURSES
ASSESSMENT METHODOLOGIES-INDIRECT
☐ ASSESSMENT OF COURSE OUTCOMES (BY
FEEDBACK, ONCE)
☐ STUDENT FEEDBACK ON FACULTY
(TWICE)
☐ ASSESSMENT OF MINI/MAJOR PROJECTS
BY EXT. EXPERTS
☐ OTHERS
Prepared by Approved by
Mr. Hari C V Ms. Liza Annie Joseph
(Faculty) (HOD)
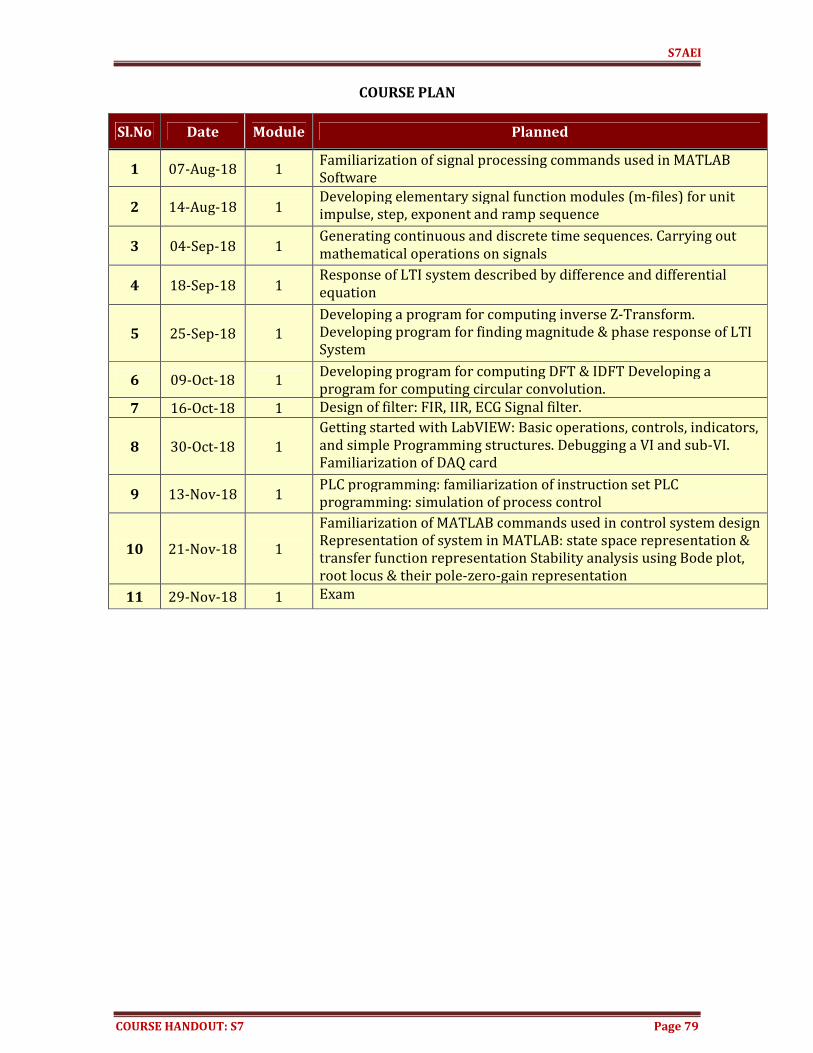
S7AEI
COURSE HANDOUT: S7 Page 79
COURSE PLAN
Sl.No Date Module Planned
1 07-Aug-18 1 Familiarization of signal processing commands used in MATLAB Software
2 14-Aug-18 1 Developing elementary signal function modules (m-files) for unit impulse, step, exponent and ramp sequence
3 04-Sep-18 1 Generating continuous and discrete time sequences. Carrying out mathematical operations on signals
4 18-Sep-18 1 Response of LTI system described by difference and differential equation
5 25-Sep-18 1 Developing a program for computing inverse Z-Transform. Developing program for finding magnitude & phase response of LTI System
6 09-Oct-18 1 Developing program for computing DFT & IDFT Developing a program for computing circular convolution.
7 16-Oct-18 1 Design of filter: FIR, IIR, ECG Signal filter.
8 30-Oct-18 1 Getting started with LabVIEW: Basic operations, controls, indicators, and simple Programming structures. Debugging a VI and sub-VI. Familiarization of DAQ card
9 13-Nov-18 1 PLC programming: familiarization of instruction set PLC programming: simulation of process control
10 21-Nov-18 1
Familiarization of MATLAB commands used in control system design Representation of system in MATLAB: state space representation & transfer function representation Stability analysis using Bode plot, root locus & their pole-zero-gain representation
11 29-Nov-18 1 Exam

S7AEI
COURSE HANDOUT: S7 Page 80
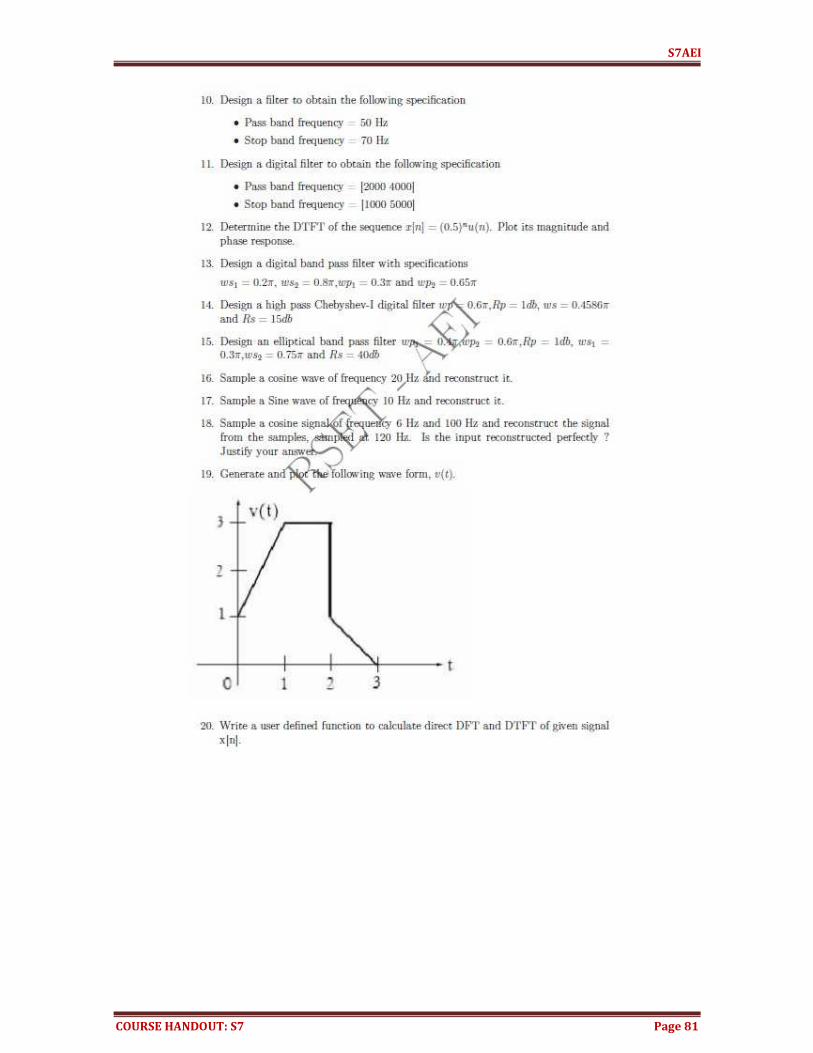
S7AEI
COURSE HANDOUT: S7 Page 81

S7AEI
COURSE HANDOUT: S7 Page 82
Related Documents











