Real World Data Analysis Final Project Object Classification on 3D Environments Abraham Monrroy Cano 2014/01/29

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Real World Data AnalysisFinal Project
Object Classification on3D Environments
Abraham Monrroy Cano2014/01/29

Hypothesis
Objects in three-dimensional space can be classified accurately through the analysis of Point Cloud data
acquired by LiDARs

What is a LiDAR?
A LiDAR (Light RaDAR) is a sensor that measures distance by
illuminating a target with a laser and analyzing the reflected light.
X Y Z R
77.465 12.068 2.860 0.00
77.502 12.323 2.863 0.00
45.525 7.448 1.769 0.00
45.517 7.594 1.770 0.00
77.819 13.253 2.878 0.00
77.885 13.516 2.882 0.00
77.945 13.779 2.886 0.00

What is a PointCloud?
• A point cloud is a set of data points in some coordinate system.
• Are intended to represent the external surface of an object.

Analyzed Dataset
KITTI Dataset is a collection of:
• Velodyne Points (Point Clouds)
• Stereo Images
• GPS localization points
Is free and available for academic use only

Workflow
Data structure
Analyze Train Test Result

Data structure
Input• Velodyne Points in binary format• JPEG Images (used only for reference visualization)• Labels in XML format for each frame in the image coordinate
system
My Processed Output• Velodyne Points in Matlab’s structure array and labeled.• Extracted Velodyne points for each labeled object (extracted
from 2D to 3D)• Generated 2D image from 3D points

Analysis
Approaches:1. Using the 3D projection in an image. SURF, ORB, HOG features
• Result: Failed. Since the image is not complex enough, there were not enough features to perform data analysis.
2. Using the 3D points and try to obtain descriptive features.
• Result: Success, there are a few feature descriptors for 3D point clouds.

Features
• Extract local features from the now segmented velodyne points.
Feature NameSupports Texture / Color
Local / Global / Regional
Best Use Case
PFH No L
FPFH No L 2.5D Scans (Pseudo single position range images)
VFH No G Object detection with basic pose estimation
CVFH No RObject detection with basic pose estimation, detection of partial objects
RIFT Yes LReal world 3D-Scans with no mirror effects. RIFT is vulnerable against flipping.
RSD No L
NARF No L 2.5D (Range Images)
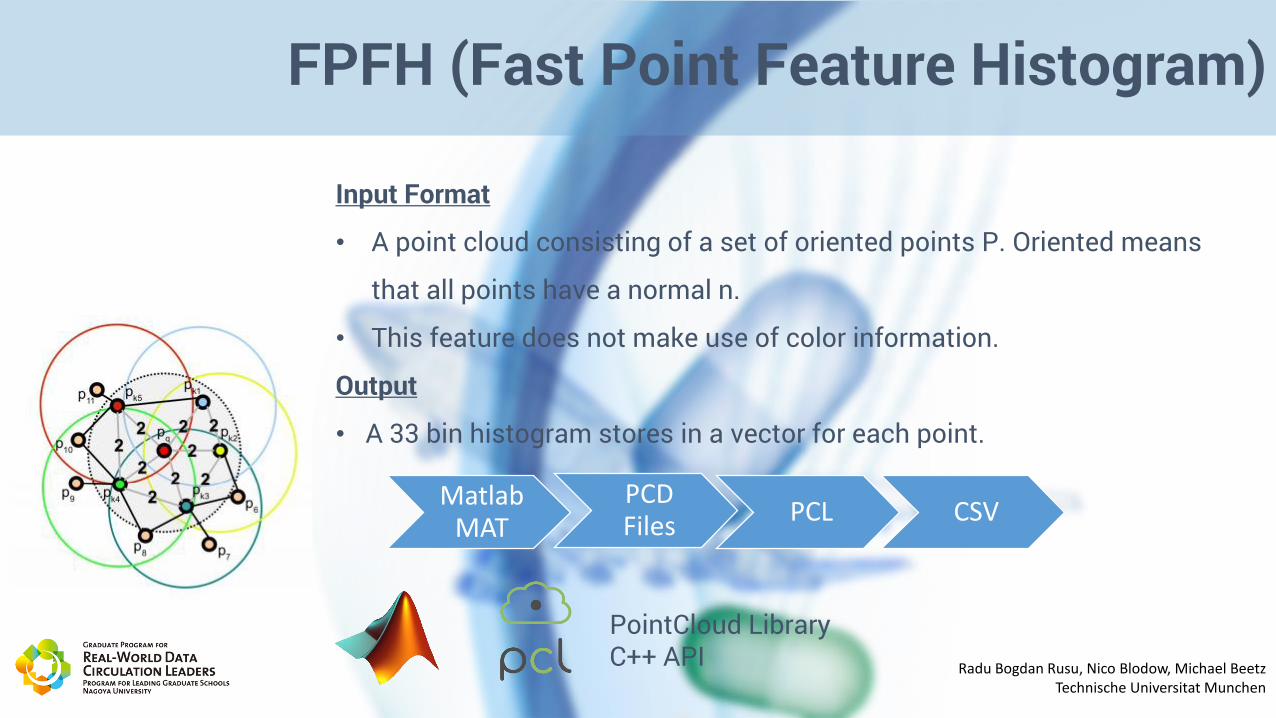
FPFH (Fast Point Feature Histogram)
Input Format
• A point cloud consisting of a set of oriented points P. Oriented means
that all points have a normal n.
• This feature does not make use of color information.
Output
• A 33 bin histogram stores in a vector for each point.
Radu Bogdan Rusu, Nico Blodow, Michael BeetzTechnische Universitat Munchen
PointCloud LibraryC++ API
MatlabMAT
PCD Files PCL CSV

SVM Training / Tests / Results
SVM Type Accuracy
Multiclass Model 72.8627%Car binary Model 85.8886%Pedestrian binary Model 96.3387%Van binary Model 90.1602%
Training set #Objects
1 572
2 56
3 705
4 1754

Todo Work
• Test with other features extractors.
• Train with more observations
• The development of a detector in the PointCloud would be useful for other
purposes such as perception systems.

ご清聴ありがとうございます