Rotation and Orientation: Affine Combination Jehee Lee Seoul National University

Rotation and Orientation: Affine Combination Jehee Lee Seoul National University.
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Rotation and Orientation:Affine Combination
Jehee Lee
Seoul National University
Applications
• What do we do with quaternions ?– Curve construction
• Keyframe animation
33221100 )()()()()( qqqqq tBtBtBtBt

Applications
• What do we do with quaternions ?– Filtering
• Convolution
kikikiki aaaF qqqq 0)(
iq
)( iF q

Applications
• What do we do with quaternions ?– Statistical analysis
• Mean

Applications
• What do we do with quaternions ?– Curve construction
• Keyframe animation– Filtering
• Convolution– Statistical analysis
• Mean
• It’s all about weighted sum !
Weighted Sum
• How to generalize slerp for n-points– Affine combination of n-points
• Methods– Re-normalization– Multi-linear– Global linearization – Functional Optimization

Inherent problem
• Weighted sum may have multiple solutions– Spherical structure– Antipodal equivalence
Re-normalization
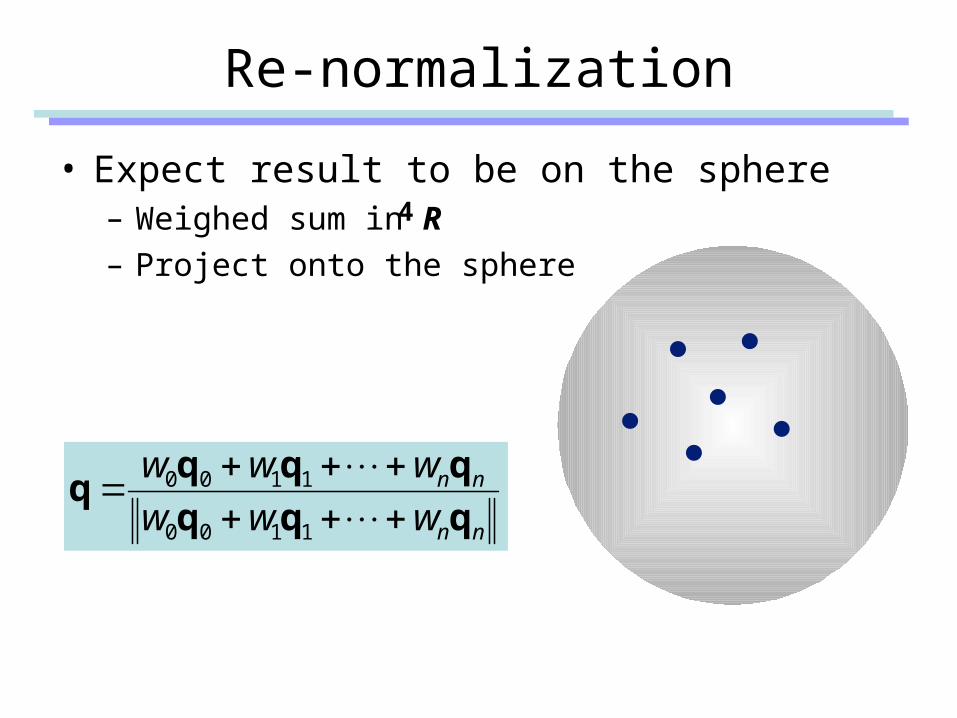
• Expect result to be on the sphere– Weighed sum in R– Project onto the sphere
4
nn
nn
www
www
qqq
qqqq
1100
1100
Re-normalization
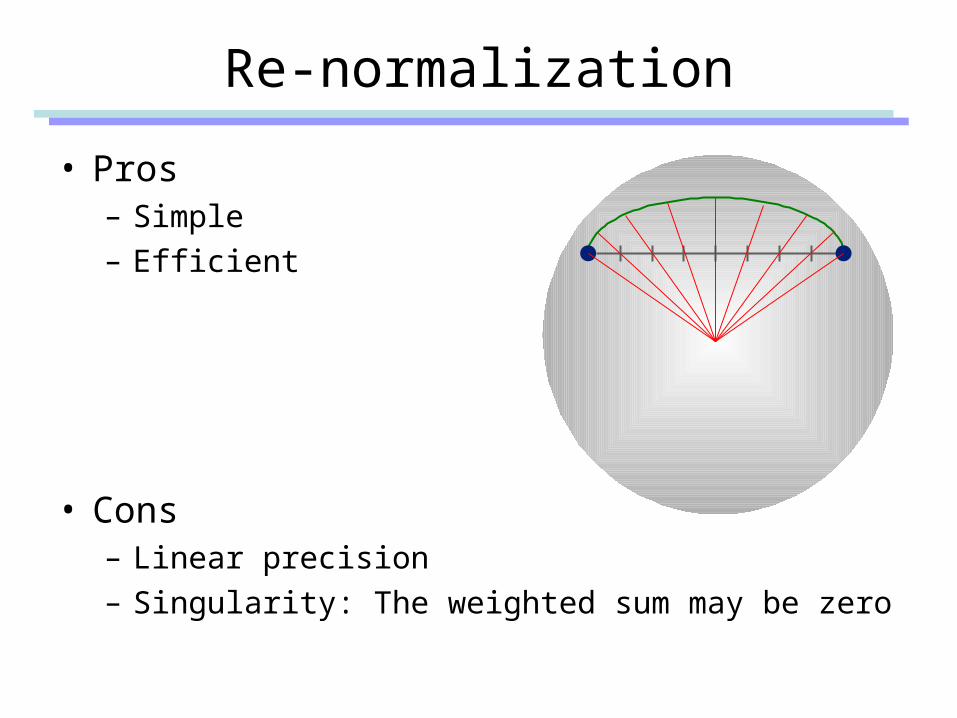
• Pros– Simple– Efficient
• Cons– Linear precision– Singularity: The weighted sum may be zero
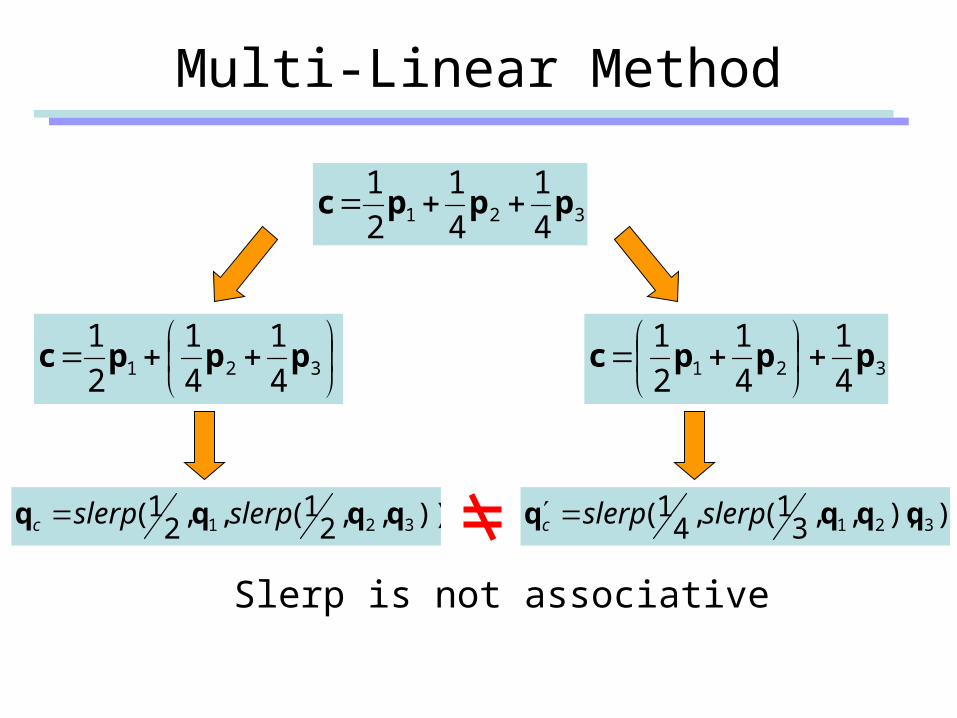
Multi-Linear Method
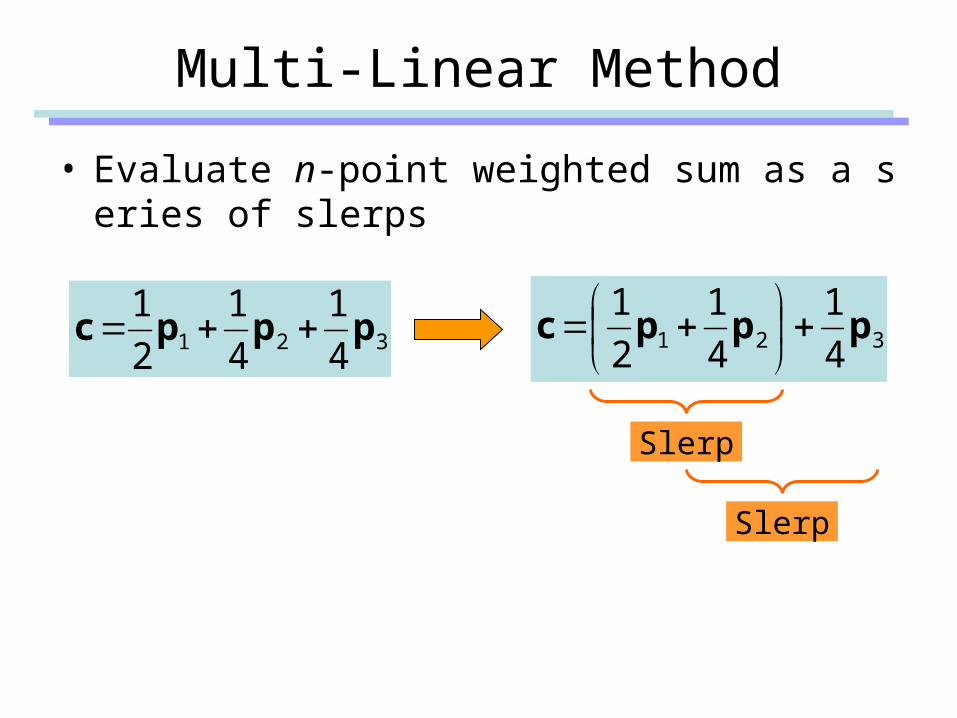
• Evaluate n-point weighted sum as a series of slerps
321 4
1
4
1
2
1pppc 321 4
1
4
1
2
1pppc
Slerp
Slerp

Multi-Linear Method
• Evaluate n-point weighted sum as a series of slerps
321 4
1
4
1
2
1pppc 321 4
1
4
1
2
1pppc
Slerp
Slerp
)),,,31(,4
1( 321 qqqq slerpslerpc

De Casteljau Algorithm
• A procedure for evaluating a point on a Bezier curve
t : 1-t
t : 1-t
t : 1-t
P(t)

Quaternion Bezier Curve
• Multi-linear construction– Replace linear interpolation by slerp– Shoemake (1985)
)log()1()1()1(
)log()0()0()0(
)1(
)0(
312
1
110
1
3
0
bbqq
bbqq
bq
bq
k
k
3b
1b 2b
0b

Quaternion Bezier Spline
• Find a smooth quaternion Bezier spline that interpolates given unit quaternions– Catmull-Rom’s derivative estimation
1iq
)log(2
1)( 1
11
iiit qq
1iq
iq
2iq
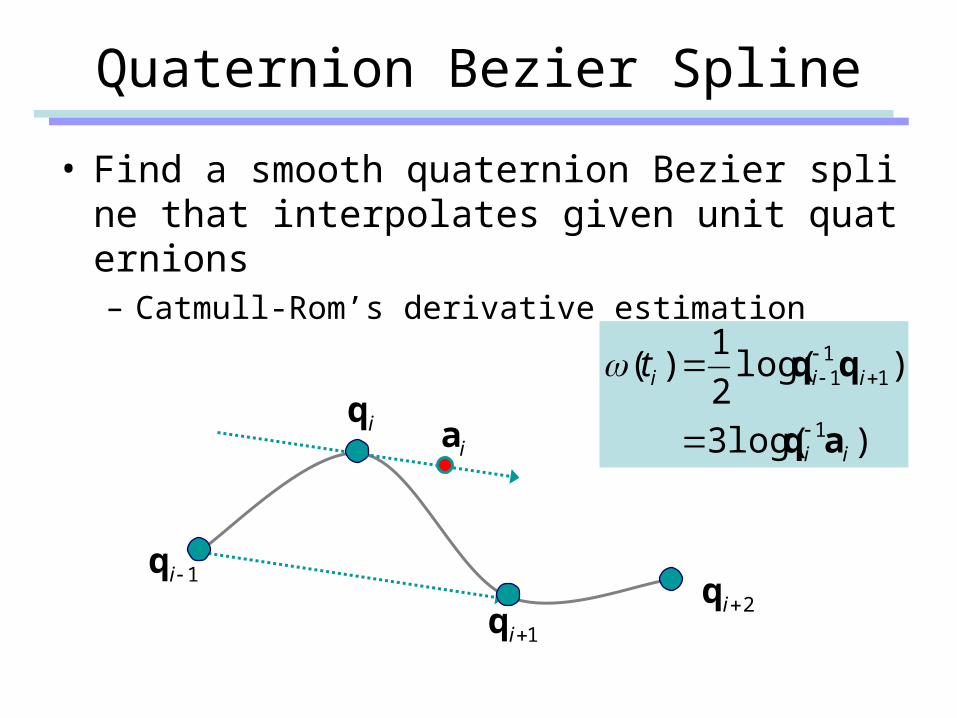
Quaternion Bezier Spline
• Find a smooth quaternion Bezier spline that interpolates given unit quaternions– Catmull-Rom’s derivative estimation
1iq
1iq
iq
2iq
)log(3
)log(2
1)(
1
111
ii
iiit
aq
ia

Quaternion Bezier Spline
• Find a smooth quaternion Bezier spline that interpolates given unit quaternions– Catmull-Rom’s derivative estimation– Bezier control points (qi, ai, bi, qi+1) of i-th curve segm
ent
1iq
1iq
iq
2iq
ia
ib
Multi-Linear Method
321 4
1
4
1
2
1pppc
321 4
1
4
1
2
1pppc
321 4
1
4
1
2
1pppc
Slerp is not associative
)),,,31(,4
1( 321 qqqq slerpslerpc )),,21(,,2
1( 321 qqqq slerpslerpc

Multi-Linear Method
• Pros– Simple, intuitive– Inherit good properties of slerp
• Cons– Need ordering
• Eg) De Casteljau algorithm– Algebraically complicated
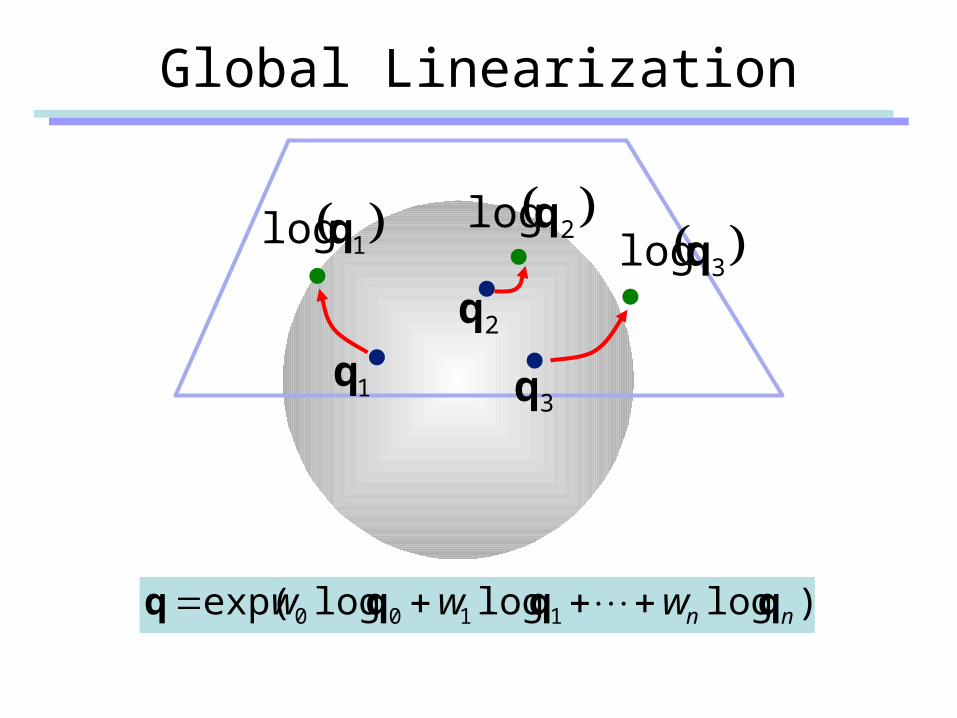
Global Linearization
)logloglogexp( 1100 nnwww qqqq
1q
1log q
3q
2q
2log q 3log q

Global Linearization
• Pros– Easy to implement– Versatile
• Cons– Depends on the choice of the re
ference frame– Singularity near the antipole
Functional Optimization
• In vector spaces– We assume that this weighted sum was derived from
a certain energy function
nnwww pppc 2211
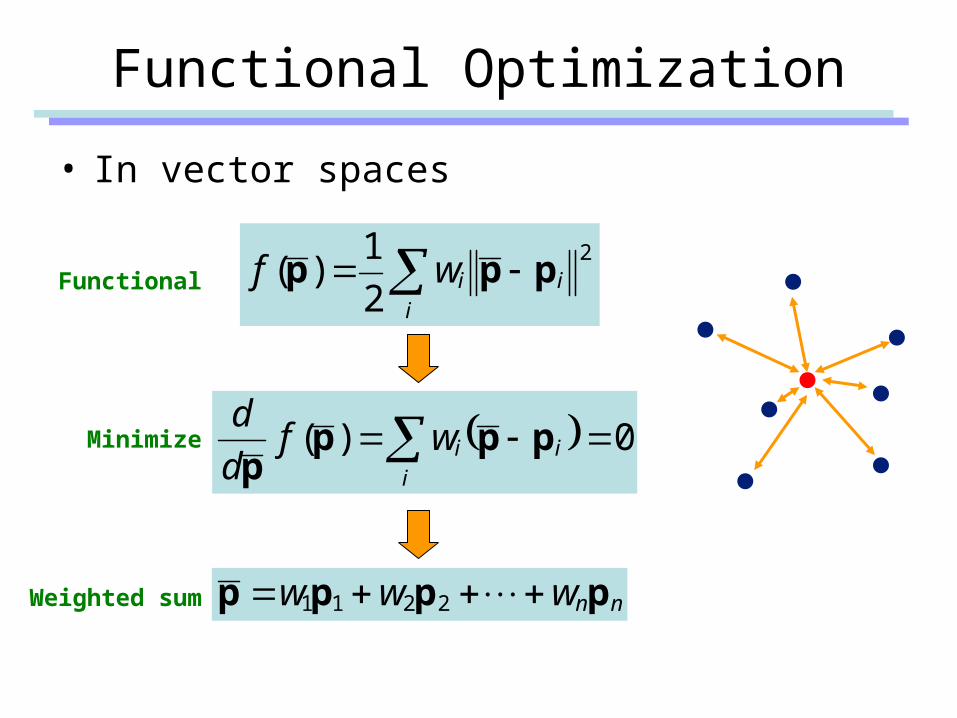
Functional Optimization
• In vector spaces
i
iiwf2
2
1)( ppp
0)( i
iiwfd
dppp
p
nnwww pppp 2211
Functional
Minimize
Weighted sum

Functional Optimization
• In orientation space– Buss and Fillmore (2001)
• Spherical distance
• Affine combination satisfies
i
iiwf 2,dist2
1)( qqq
)log(),dist( 21121 qqqq
)0,0,0()log()( 1 i
iiwf qqq
q
q

Functional Optimization
• Pros– Theoretically rigorous– Correct (?)
• Cons– Need numerical iterations (Newton-Rapson)– Slow
Summary
• Re-normalization– Practically useful for some applications
• Multi-linear method– Slerp ordering
• Global linearization– Well defined reference frame
• Functional optimization– Rigorous, correct
Summary
• We don’t have an ultimate solution
• An appropriate solution may be determined by application
• More specific problems may have better solutions– For convolution filters, points have an ordering
Related Documents