*Corresponding author: E-mail: Farkh@ enit.rnu.tn All Rights Reserved. No part of this work may be reproduced, stored in retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, scanning or otherwise - except for personal and internal use to the extent permitted by national copyright law - without the permission and/or a fee of the Publisher. Copyright © 2009 SoftMotor Ltd. ISSN: 1743-9310 The Mediterranean Journal of Measurement and Control, Vol. 5, No. 4, 2009 138 ROBUST STABILIZATION FOR UNCERTAIN SECOND ORDER TIME-LAG SYSTEM R. Farkh * , K. Laabidi, M. Ksouri Research Unit on Systems Analysis and Control, National School Engineering of Tunis, Tunisia ABSTRACT In this paper, the problem of controller design for time-lag system subject to parametric uncertainty is studied. By using the idea of synthesizing a robust controller for interval plant, a new approach is proposed to develop a robustly stabilizing PI/PID controller for a given interval plant with known constant time delay. Based on a combination of the Generalized Kharitonov Theorem and the Hermite-Biehler Theorem for quasipolynomial, the characterization of all PI and PID gains that stabilize an uncertain second order delay system is obtained. At last, a numerical example is given to illustrate the effectiveness of the proposed method. Keywords Second Order Delay System, Interval Plants, PI/PID Controller, Generalized Kharitonov Theorem (GKT), Hermit-Biehler Theorem, Stability Region. 1. INTRODUCTION Delay Systems represent a class within infinite size largely used for the modelling and the analysis of transport and propagation phenomena (matter, energy or information) [1-29]. They naturally appear in the modelling of processes found in physics, mechanics, biology, chemistry, aeronautics and aerospace. Delays have a considerable influence on the behavior of closed-loop system and can generate oscillations and even instability [2-8]. Delays could be constant or time varying, known or unknown depending on the system under consideration. When the delay is a known constant, this class of delay system is called time-lag systems. PID controllers are of high interest, thanks to their broad use in industrial circles [2]. Recent studies have made use of the generalization of Hermite-Biehler theorem to compute the set of all stabilizing PID controllers for a given plant [12]. The set’s characterization of all stabilizing PI/PID parameters using a version of the Hermit-Biehler Theorem for first order delay system is presented in [9-11]. However, these results are not applicable to the second order delay system. In [16, 17], the stabilizing problem of PI/PID controller for second order delay system is analyzed using the extended Hermit-Biehler theorem. In [18], the characterization of the set of all stabilizing P/PI/PID parameters is given by using the Hermit-Biehler Theorem for polynomials for a class of time delay system which verifies the interlacing property at high frequencies. Wang [19] solved the problem of determining the PID stabilizing parameters set for high-order all pole time delay systems. In [21], Mahmoud presents a new delay-dependent stabilization scheme for a class of linear time-delay systems based on PID feedback controller. In process modeling, there exist uncertainties due to poor knowledge, environment influence, time varying parameters, nonlinearities, changing operating condition, etc. Moreover, these uncertainties make much of the established control techniques inadequate [29]. The robustness is defined as the performance and stability of plants those are exposed to uncertainties. In [22], the authors provide a pool of methods and approaches that deal with robust stability analysis (delay- dependent and delay-independent), filtering (state estimation) and control ( -control) for uncertain systems with single and multiple delays. By using Lyapunov’s second method, the results are formulated in the form of a feasibility problem in LMIs which can be solved numerically. A great number of estimation and control results concerning time-delay systems have been presented in the literature [24, 25]. The problem of robust stabilization was considered in [28], where a delay- independent condition was developed. In the context of discrete time-delay systems, the corresponding results were reported in [23, 26]. When parameter uncertainty appears, the robust control problem was dealt with in [27] where a state feedback controller was designed. Many important results in the robust control of system with parametric uncertainty have been based on Kharitanov theorem [7]. Kharitonov's theorem has been generalized for the control problem which gives a necessary and sufficient condition for stabilization of interval plants; the Generalized Kharitonov Theorem (GKT) reveals that a controller robustly stabilizes the system if it stabilizes a prescribed set of line segments in the plant parameter space [3, 4]. In [3], the GKT has been extended in the case of quasipolynomials to determine the robust stability of system with time delay. There are some important results about stabilization of interval systems. Barmish et al. proved that a first order controller stabilizes an interval plant if and only if it simultaneously stabilizes the sixteen Kharitonov plants family [1]. Huang et al. [6] used a parameter plan based on the gain phase margin tester method and the Kharitonov theorem to obtain a non constructive region such that a PID controller stabilizes the entire interval H ∞ H ∞ H ∞ H ∞

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

The Mediterranean Journal of Measurement and Control, Vol. 5, No. 4, 2009 138
ROBUST STABILIZATION FOR UNCERTAIN SECOND ORDER TIME-LAG SYSTEM
R. Farkh *, K. Laabidi, M. Ksouri Research Unit on Systems Analysis and Control, National School Engineering of Tunis, Tunisia
ABSTRACTIn this paper, the problem of controller design for time-lag systemsubject to parametric uncertainty is studied. By using the idea ofsynthesizing a robust controller for interval plant, a new approachis proposed to develop a robustly stabilizing PI/PID controller for agiven interval plant with known constant time delay.Based on a combination of the Generalized Kharitonov Theoremand the Hermite-Biehler Theorem for quasipolynomial, thecharacterization of all PI and PID gains that stabilize an uncertainsecond order delay system is obtained. At last, a numericalexample is given to illustrate the effectiveness of the proposedmethod.
KeywordsSecond Order Delay System, Interval Plants, PI/PIDController, Generalized Kharitonov Theorem (GKT),Hermit-Biehler Theorem, Stability Region.
1. INTRODUCTIONDelay Systems represent a class within infinite size largelyused for the modelling and the analysis of transport andpropagation phenomena (matter, energy or information)[1-29]. They naturally appear in the modelling of processesfound in physics, mechanics, biology, chemistry, aeronauticsand aerospace. Delays have a considerable influence on thebehavior of closed-loop system and can generate oscillationsand even instability [2-8]. Delays could be constant or timevarying, known or unknown depending on the system underconsideration. When the delay is a known constant, this classof delay system is called time-lag systems.
PID controllers are of high interest, thanks to their broad use inindustrial circles [2]. Recent studies have made use of thegeneralization of Hermite-Biehler theorem to compute the setof all stabilizing PID controllers for a given plant [12]. Theset’s characterization of all stabilizing PI/PID parametersusing a version of the Hermit-Biehler Theorem for first orderdelay system is presented in [9-11]. However, these results are
*Corresponding author: E-mail: Farkh@ enit.rnu.tn
All Rights Reserved. No part of this work may be reproduced, stored in retrievalsystem, or transmitted, in any form or by any means, electronic, mechanical,photocopying, recording, scanning or otherwise - except for personal and internaluse to the extent permitted by national copyright law - without the permissionand/or a fee of the Publisher.
Copyright © 2009 SoftMotor Ltd. ISSN: 1743-9310
not applicable to the second order delay system. In [16, 17],the stabilizing problem of PI/PID controller for second orderdelay system is analyzed using the extended Hermit-Biehlertheorem. In [18], the characterization of the set of allstabilizing P/PI/PID parameters is given by using theHermit-Biehler Theorem for polynomials for a class of timedelay system which verifies the interlacing property at highfrequencies.Wang [19] solved the problem of determining the PIDstabilizing parameters set for high-order all pole time delaysystems. In [21], Mahmoud presents a new delay-dependentstabilization scheme for a class of linear time-delay systemsbased on PID feedback controller.In process modeling, there exist uncertainties due to poorknowledge, environment influence, time varying parameters,nonlinearities, changing operating condition, etc. Moreover,these uncertainties make much of the established controltechniques inadequate [29]. The robustness is defined as theperformance and stability of plants those are exposed touncertainties. In [22], the authors provide a pool of methodsand approaches that deal with robust stability analysis (delay-dependent and delay-independent), filtering (state estimation)and control ( -control) for uncertain systems with singleand multiple delays. By using Lyapunov’s second method, theresults are formulated in the form of a feasibility problem inLMIs which can be solved numerically. A great number ofestimation and control results concerning time-delay systemshave been presented in the literature [24, 25]. The problem ofrobust stabilization was considered in [28], where a delay-independent condition was developed. In the context ofdiscrete time-delay systems, the corresponding results werereported in [23, 26]. When parameter uncertainty appears, therobust control problem was dealt with in [27] where astate feedback controller was designed.Many important results in the robust control of system withparametric uncertainty have been based on Kharitanov theorem[7]. Kharitonov's theorem has been generalized for the controlproblem which gives a necessary and sufficient condition forstabilization of interval plants; the Generalized KharitonovTheorem (GKT) reveals that a controller robustly stabilizes thesystem if it stabilizes a prescribed set of line segments in theplant parameter space [3, 4]. In [3], the GKT has beenextended in the case of quasipolynomials to determine therobust stability of system with time delay. There are someimportant results about stabilization of interval systems.Barmish et al. proved that a first order controller stabilizes aninterval plant if and only if it simultaneously stabilizes thesixteen Kharitonov plants family [1]. Huang et al. [6] used aparameter plan based on the gain phase margin tester methodand the Kharitonov theorem to obtain a non constructiveregion such that a PID controller stabilizes the entire interval
H∞
H∞
H∞H∞

ROBUST STABILIZATION FOR UNCERTAIN SECOND ORDER TIME-LAG SYSTEM
plants. In [13], a proposed method based on the stabilityboundary locus has further used to find the stabilizing regionof PI parameters for the control of a plant with uncertainparameters. Patre et al. proposed a two-degrees-of-freedomdesign methodology for interval process plants to guaranteeboth robust stability and performance [15]. Based on the plantmodel in time domain, and by using the extraordinary featureresults from Kronecker sum operation, the calculation of allstabilizing PI and PID controllers for uncertain system waspresented in [20]. In [5, 12], the Hermit-Biehler theorem wasused for the formulation of P, PI, PID controller to stabilize adelay free interval plants family.
We remark that the previously methods are only applied tosynthesis a robustly stabilizing controller for interval plantwithout delay. As motivated by Generalized Kharitonovtheorem, we propose to compute a controller which stabilizes atime delay system where the delay is a known constant and thecoefficients are subject to perturbation within prescribedranges. The advantage of our method is to compute all PI andPID gains which stabilize interval second order plant withtime-lag. Hence, addressing this issue is one of thecontributions of our work in this paper.
This paper is organized as follows: Section 2 presents thepreliminary knowledge and the problem formulation.Sections 3 and 4 are devoted respectively to robuststabilization problem for uncertain second order system withtime-lag controlled via PI and PID controller using theGeneralized Kharitonov Theorem. A numerical example isgiven in each section to illustrate the developed method.
2. PRELIMINARY RESULTS AND PROBLEM FORMULATIONS
In this paper, we focus on the problem of robust stabilizationof time-lag system which belongs to linear interval plant. First,we recall some results from the area of parametric robustcontrol before stating the Generalized Kharitonov Theorem.
Let us consider a family F of real interval polynomials
where
The four Kharitonov polynomials associated with F are:
The set of four Kharitonov polynomials associated with F isdenoted KF.
Now, let G be a family of single input single output plant, withtransfer functions:
Where belongs to a family of real interval polynomialsN, and belongs to a family of fixed degree, real intervalpolynomials D. We call G an interval plant and the set ofKharitonov systems GK associated with G, which is defined tobe the following set of 16 transfer functions,
We now introduce the Kharitonov segments associated with G.Let KSN be the subset of consisting of the four following linesegments,
The line segment it presents all convex combinationof the form .
Notice that KSN does not contain the convex combination ofevery possible pair of two elements in KN and therefore thenumbering of the four Kharitonov polynomials which we adoptin our notation is important. We can similarly define the subsetKD and KSD of D. Finally, let GKS be the subset of G definedby:
One possible element of GKS is for example:
where is some real number in [0, 1]. Notice that GKS containat most 32 one-parameter families of rational functions whichwe call the Kharitonov segments associated with G.
The control problem here is to find necessary and sufficientconditions under which a given controller
stabilizes the interval plant G. Thisproblem can be solved using the Generalized KharitonovTheorem for polynomial stated as follow:
Theorem 1 [3]
For a given of real polynomials:
1- C(s) stabilizes the linear interval polynomial G if and only ifthe controller stabilizes every plant in GKS.
2- Moreover, if the controller is of the form then it is sufficient that the
controller stabilizes every plant in GK, where , and
0 1( ) ... nnp s p p s p s= + + +
0 0 1 1 10, , , , ..., ,⎡ ⎤ ⎡ ⎤ ⎡ ⎤∈ ∈ ∈⎣ ⎦ ⎣ ⎦ ⎣ ⎦n n np p p p p p p p p
1 2 30 1 2 3
2 1 2 30 1 2 3
3 1 2 30 1 2
4 1 2 30 1 2 3
( ) ...
( ) ...
( ) ...
( ) ...
K s p s p s p s p s
K s p s p s p s p s
K s p s p s p s ps
K s p s p s p s p s
= + + + +
= + + + +
= + + + +
= + + + +
F
F
F
F
( )( )( )
n sG sd s
=
n s( )d s( )
( ) : ( ) ( )( )
n s n s and d sd s
⎧ ⎫= ∈ ∈ ∈⎨ ⎬⎩ ⎭
KG G N D
1 2 1 3
2 4 3 4
, ; ,
, ; ,
K K K K
K K K K
⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦
N N N N
N N N N
KN1 KN
2[ , ]λKN
1 λ 1–( )KN2+
( ) :( )
( ( ) ( ) )
( ( ) ( ) )
n sd sn s and d s
orn s and d s
⎧ ⎫∈⎪ ⎪⎪ ⎪⎪ ⎪∈ ∈= ⎨ ⎬⎪ ⎪⎪ ⎪
∈ ∈⎪ ⎪⎩ ⎭
N DKS
N D
G
K KSG
KS K
1
3 4( )(1 )
Kg s
K Kλ λ=
− +N
D D
λ
C s( ) C1 s( ) C2 s( )⁄=
ci s( )ci s( ) sti ais bi+( )ui s( )zi s( )=
ti 0≥ ai bi
(1)
(2)
(3)
(4)
(5)
(6)
(7)
139

ROBUST STABILIZATION FOR UNCERTAIN SECOND ORDER TIME-LAG SYSTEM
are arbitrary real number, is an anti-Hurwitz polynomial,and is an even or odd polynomial.The GKT has been extended in the case of quasipolynomials todetermine the robust stability of system with time delay, wherethe control problem is to find necessary and sufficientconditions under which a given delay controller
stabilizes the interval plant G.According to [3], this stability problem can be solved using theGeneralized Kharitonov Theorem for quasipolynomials statedas follow:Theorem 2 [3]Let a given of quasipolynomials where:
With being complex polynomials satisfying the followingcondition:
Then, stabilizes the linear interval polynomial G if andonly if the controller stabilizes every plant in GKS.In other words, the above theorem states that a given delaycontroller stabilizes an interval plant if and only if it stabilizesits associated Kharitonov segments.We consider the following transfer function:
where , are linear interval polynomials and is aconstant known delay. The problem studied in this paper canbe formulated as follows: for a continuous time-lag systemdescribed by (10), the robust controller isto be designed with fixed polynomials , such thatfor the closed loop’s robust stability is guaranteed.
Figure 1. (a) Feedback control of time delay system, (b) Feedback control using delay controller
By making some change in the scheme control, the delay willbe considered with the controller as showing by Fig. 1. Indeed,Fig. 1a presents a feedback control where the plant contains adelay (thin dotted rectangle). This delay is located in forwardloop then it can be included with the controller as showing byFig. 1b (thick dotted rectangle). Moreover, the control scheme
consists of utilizing a delay controller and a plant which willbe seen as a delay free interval system. Then, the transferfunction and the controller can be expressed by
and . Hence, we are allowed to use Theorem 2 for quasipolynomialsto compute all stabilizing PI/PID gains for interval systemswith time-lag.
3. ROBUST PI STABILIZATIONIn this section, we consider the problem of characterizing all PIcontrollers that stabilize a given second order interval plantwith time-lag:
where , , .The controller is given by: .To obtain all PI gains that stabilize G(s) using the GKT forquasipolynomials, we take the new transfer function G(s) as:
and the new compensator:
.
The family of closed loop characteristic quasipolynomials becomes:
The problem of characterizing all stabilizing PI controllers isto determine all the values of and for which the entirefamily of closed loop characteristic quasipolynomials isHurwitz.Let and theKharitonov polynomials corresponding to N(s) and D(s),respectively.Furthermore let: and
, the Kharitonov segments corresponding to N(s) and D(s) respectively, where:
and . Let GKS(s) denote the family of 32 segmentplants:
ui s( )zi s( )
C s( ) c1 s( ) c2 s( )⁄( )e Ls–=
C s( ) c1 s( ) c2 s( ),( )=
1 20 1 2( ) ( ) ( ) ( ) ...i isL sLi i i iC s C s e C s e C s− −= + + +
Cij
0 ji idegree F (s) degree F (s) , j 0⎡ ⎤ ⎡ ⎤> ≠⎣ ⎦ ⎣ ⎦
C s( )
( )( )( )
n s LsG s ed s
−=
n s( ) d s( ) L
C s( ) nc s( ) dc s( )⁄=nc s( ) dc s( )
C s( ) n s( ) d s( )⁄= C s( ) nc s( ) dc s( )⁄( )e Ls–=
20 1
( )( )
( )
−= =
+ +
Lss Kes
s a a s sG
DN
K K K[ , ]∈ a0 a0 a0[ , ]∈ a1 a1 a1[ , ]∈
C s( ) KpKis
-----+⎝ ⎠⎛ ⎞ e Ls–=
G s( ) N s( )D s( )------------ K
a0 a1s s2+ +-------------------------------= =
C s( )nc s( )dc s( )------------ Kp
Kis
-----+⎝ ⎠⎛ ⎞ e Ls–= =
Δ s Kp Ki, ,( )
20 1
( , , ) ( ) ( ) ( ) ( )
( ) ( )
Δ = +
−= + + + +
p i c c
i p
s K K s n s s d s
LsK K K s e a a s s s
N D
Kp Ki
KN i s( ) i 1 2 3 4, , ,=, KD i s( ) i 1 2 3 4, , ,=,
KSNi s( ) i 1 2 3 4, , ,=,
KSDi s( ) i 1 2 3 4, , ,=,
( , ) (1 ) ( ) ( )
( , ) (1 ) ( ) ( )
( , ) (1 ) ( ) ( )
( , ) (1 ) ( ) ( )
( , ) (1 ) ( ) ( )
( , ) (1 ) ( ) ( )
( , ) (1 ) ( ) ( )
λ λ λ
λ λ λ
λ λ λ
λ λ λ
λ λ λ
λ λ λ
λ λ λ
⎧ = − +⎪
= − +⎪⎨
= − +⎪⎪ = − +⎩
= − +
= − +
= − +
1
2
3
4
1
2
3
4
s s s
s s s
s s s
s s s
s s s
s s s
s s s
1 2N
1 3N
2 4N
3 4N
1 2D
1 3D
2 4D
D
KS N N
KS N N
KS N N
KS N N
KS D D
KS D D
KS D DKS ( , ) (1 ) ( ) ( )λ λ λ
⎧⎪⎪⎨⎪⎪ = − +⎩ s s s3 4D D
λ 0 1[ , ]∈
(8)
(9)
(10)
(11)
140

ROBUST STABILIZATION FOR UNCERTAIN SECOND ORDER TIME-LAG SYSTEM
Then, GKS(s, λ) consists of:
The closed loop characteristic quasipolynomial for each ofthese 32 plant segments is denoted by
and is defined as:
where,
We state the following theorem on stabilizing an intervalsecond order plant with time–lag using PI controller. Theorem 3 Let G(s) be a second order interval plant withtime-lag, the entire family G(s) is stabilized by a PI controllerif and only if each is stabilized by thatsame PI controller.ProofUsing Theorem 2, it follows that the entire family is stable if and only if are all stable. Therefore,the entire family G(s) is stabilized by a PI controller if and onlyif every element of is simultaneously stabilized bythe same PI.To get a characterization of all PI controllers that stabilize theinterval plant G(s) by applying this procedure for each
belongs to GKS(s), the results in [16] will be used.Example 1:Consider the interval plant ,and the time delay fixed at . Assume that thecoefficients , and K lie with the following bounds
, and .The Kharitonov polynomials corresponding to N(s) and D(s)are
The Kharitonov segments corresponding to N(s) and D(s)are:
The entire family GKS(s) is given as follows:
[ ]
( , ) /
( , ) ( )( , ) ( , ) ( , )
( ) ( , )
1, 2,3, 4, 1, 2,3, 4, 0,1
ij
i j
ij jij i
G s
s ss G s G s
s s
i j
λ
λλ λ λ
λ
λ
= = =
= = ∈
⎧ ⎫⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
∪NKS
D
KS KNG
KD KS
11 41 12 422 20 1 0 1
13 43 14 442 20 1 0 1
21 31 22 322 20 1 0 1
23 33 24 342 20 1 0 1
11 210
( , )
1 1,
1 1,
1 ( ) 1 ( ),
1 ( ) 1 ( ),
(
s
G G G Ga a s s a a s s
G G G Ga a s s a a s s
K K K KG G G Ga a s s a a s s
K K K KG G G Ga a s s a a s s
KG Ga a
λ
λ λ
λ λ
=
= = = =+ + + +
= = = =+ + + +
+ − + −= = = =
+ + + +
+ − + −= = = =
+ + + +
= =+
∪
KSG
21 1 1
12 22 20 0 1 1
13 230 0 1 1
14 24 20 1 1 1
31 41 20 1 1 1
32 42 20 0 1 1
33 430 0 1 1
34 440 1 1 1
( ))
( )
( )
( ( ))
( ( ))
( )
( )
( ( ))
a a s s
KG Ga a a a s s
KG Ga a a a s
KG Ga a a a s s
KG Ga a a a s s
KG Ga a a a s s
KG Ga a a a s
KG Ga a a a
λ
λ
λ
λ
λ
λ
λ
λ
+ − +
= =+ − + +
= =+ − +
= =+ + − +
= =+ + − +
= =+ − + +
= =+ − +
= =+ + − 2s s
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪
+⎪ ⎪⎩ ⎭
Gij s λ,( )δij s Kp Ki λ, , ,( )
( , ) ( ( , )) ( ) ( ( , ))δ λ λ λ= + +i j ij i p ijs sNum G s K K s den G s
[ ]
( ( , )) ( , ) ( )
( ( , )) ( ) ( , )
1,2,3,4, 1,2,3,4, 0,1
λ λ
λ λ
λ
⎧ =⎪⎪ =⎨⎪ = = ∈⎪⎩
∪
∪
i jij
j iij
Num G s s s
den G s s s
i j
N
D
KS KN
KD KS
Gij s λ,( ) GKS s λ,( )∈
Δ s Kp Ki, ,( )δij s Kp Ki λ, , ,( )
Gij s λ,( )
Gij s λ,( )
G s( ) Ke Ls–
a0 a1s s2+ +-------------------------------=
L 2s=a0 a1,
2 K 3< < 1.5 a1 2.5< <
2
2
2
2
( ) ( ) 2( ) ( ) 3
( ) 4 1.5( ) 4 2.5
( ) 6 1.5( ) 6 2.5
⎧ = =⎪⎨
= =⎪⎩⎧ = + +⎪
= + +⎪⎨
= + +⎪⎪ = + +⎩
1 2
3 4
1
2
3
4
s ss s
s s ss s s
s s ss s s
N NN N
DD
DD
20 1 1 1
20 0 1 1
0 0 1 1
20 1 1 1
( , ) ( , ) (1 ) 1
( , ) ( , ) (1 ) 1 ( )
( , ) ( ( ))
( , ) ( )
( , ) ( )
( , ) ( ( ))
1 4
2 3
1
2
3
3
s s K K
s s K K K K
s a a a a s s
s a a a a s s
s a a a a s
s a a a a s s
λ λ λ λ
λ λ λ λ λ
λ λ
λ λ
λ λ
λ λ
⎧ = = − + =⎪⎨
= = − + = + −⎪⎩⎧ = + + − +⎪⎪ = + − + +⎪⎨
= + − +⎪⎪
= + + − +⎪⎩
N N
N N
D
D
D
N
KS KS
KS KS
KS
KS
KS
KS
141

ROBUST STABILIZATION FOR UNCERTAIN SECOND ORDER TIME-LAG SYSTEM
We remark that g5, g6, g7, g8, h1, h2, h3, h4, h5, h6, h7, and h8have an infinity of transfer function’s sets due to theirdependence in . To reduce the complexity of this problem,we set at 0, 0.2, 05, 0.7and 1 as different values of
.
We define and where for and . So we
obtain:
The Fig. 2 presents the stabilizing values for the entirefamily G(s) by invoking the result presented in [16] which isapplying for each transfer function belongs to GKS(s,λ).
The intersection of these stability regions presents anoverlapped area of the boundaries which constitutes the entirefeasible controller sets that stabilize the entire family G(s).
Figure 2. The stabilizing set of (Kp, Ki) for G(s)
Figure 3. Stability region in (Kp, Ki) plan for interval plant G(s)
Fig. 3 shows a zoom of Fig. 2, it shows that the final stabilityboundaries of G(s) is bounded by parts of those given byapplying the procedure described in [16] to h55 and h81.
4. ROBUST PID STABILIZATIONIn the following, we consider the problem of characterizing allPID controllers that stabilize a given second order intervalplant with time-lag:
where , , .
1 31 41 2 12 422 2
3 13 43 4 14 442 2
5 21 31 6 22 322 2
7 23 33 8 24 342 2
1 11 21
( , )
1 1,
4 1.5 4 2.51 1
,6 1.5 6 2.5
1 1,
4 1.5 4 2.51 1
,6 1.5 6 2.5
s
g G G g G Gs s s s
g G G g G Gs s s s
g G G g G Gs s s s
g G G g G Gs s s s
h G G
λ
λ λ
λ λ
=
= = = = = =+ + + +
= = = = = =+ + + +
+ += = = = = =
+ + + ++ +
= = = = = =+ + + +
= =
∪
KSG
2
2 12 22 2
3 13 23
4 14 24 2
5 31 41 2
6 32 42 2
7 33 43
8 34 44 2
2,
4 (1.5 )2
(4 2 ) 1.52
,(4 2 ) 2.5
26 (1.5 )
3,
4 (1.5 )3
(4 2 ) 1.53
,(4 2 ) 2.5
36 (1.5 )
s s
h G Gs s
h G Gs
h G Gs s
h G Gs s
h G Gs s
h G Gs
h G Gs s
λ
λ
λ
λ
λ
λ
λ
λ
=+ + +
= = =+ + +
= = =+ +
= = =+ + +
= = =+ + +
= = =+ + +
= = =+ +
= = =+ + +
⎧⎪⎪⎪⎪⎪⎪
⎨
⎫⎪⎪⎪⎪⎪⎪
⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪
⎬⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
λλ
λ 0 1[ , ]∈
glp gl s λp,( )= hlp hl s λp,( )=λp 0 0.2 0.5 0.7 1, , ,{ , }∈ h 1…8= p 1…5=
1 1
2 2
3 3
4 4
5 5
( , 0) ( , 0)( , 0.2) ( , 0.2)( , 0.5) ( , 0.5)( , 0.7) ( , 0.7)( , 1) ( , 1)
λ λλ λλ λλ λλ λ
= = = =⎧ ⎧⎪ ⎪= = = =⎪ ⎪⎪ ⎪= = = =⎨ ⎨⎪ ⎪= = = =⎪ ⎪⎪ ⎪= = = =⎩ ⎩
l l l l
l l l l
l l l l
l l l l
l l l l
g g s h g sg g s h g sg g s and h g sg g s h g sg g s h g s
Kp Ki( , )
-6 -4 -2 0 2 4 60
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Kp
Ki
-1.5 -1 -0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
Kp
Ki
h55h81
20 1
( )( )
( )
−= =
+ +
Lss Kes
s a a s sG
DN
K K K[ , ]∈ a0 a0 a0[ , ]∈ a1 a1 a1[ , ]∈
142

ROBUST STABILIZATION FOR UNCERTAIN SECOND ORDER TIME-LAG SYSTEM
The controller is given by: .To obtain all PID gains that stabilize G(s) using the GKT forquasipolynomials, we consider the new transfer function G(s)as:
and the new compensator C(s) is given by:
The family of closed loop characteristic quasipolynomials becomes:
The problem of characterizing all stabilizing PID controllers isto determine all the values of , and for which theentire family of closed loop characteristic quasipolynomials isHurwitz.The closed loop characteristic quasipolynomial for each ofthese 32 plant segments is denoted by
and is defined as:
where
We state Theorem 4 on stabilizing an interval second orderplant with time delay via PID controller. Theorem 4Let G(s) be a second order interval plant with time-lag, theentire family G(s) is stabilized by a PID controller if and onlyif each is stabilized by that same PIDcontroller.ProofUsing Theorem 2, it follows that the entire family
is stable if and only if areall stable. Therefore, the entire family G(s) is stabilized by aPID controller if and only if every element of GKS(s) issimultaneously stabilized by the same PID.We can employ the results in [17] to achieve a characterizationof all PID controllers that stabilize the interval plant G(s) byapplying this procedure for each .Example 2We consider the same delay plant given by Example 1. Tocompute the all stabilizing PID gains, first we determine all Kpgain stabilizers for GKS(s). We note by , for
, the set of Kp gain correspondent to each and .
We obtain the following sets:
Therefore the set off all Kp gain that stabilize the entire familyG(s) is given by:
For a fixed Kp, for instance , we obtain thestabilizing set of values for GKS(s) by using theapproach developed in [17] and which is applied for each
belongs to GKS(s).
Fig. 4 presents these stability regions in plan .
C s( ) KpKis
----- Kds+ +⎝ ⎠⎛ ⎞=
2
0 1
( )( )
( )= =
+ +s K
ss a a s s
NG
D
( )( ) ( )
( )−= = + +c i
p dc
n s K LsC s K K s ed s s
Δ s Kp Ki Kd, , ,( )
2 2
0 1
( , , ) ( ) ( ) ( ) ( )
( ) ( )
Δ = +
−= + + + + +
p i c c
i p d
s K K s n s s d s
LsK K K s K s e a a s s s
N D
Kp Ki, Kd
Gij s λ,( )δij s Kp Ki Kd λ, , , ,( )
2( , ) ( ( , )) ( ) ( ( , ))δ λ λ λ= + + +ij ij i p d ijs sNum G s K K s K s den G s
[ ]
( ( , )) ( , ) ( )
( ( , )) ( ) ( , )
1,2,3,4, 1,2,3,4, 0,1
λ λ
λ λ
λ
⎧ =⎪⎪ =⎨⎪ = = ∈⎪⎩
∪
∪
i jij
j iij
Num G s s s
den G s s s
i j
N
D
KS KN
KD KS
Gij s λ,( ) GKS s( )∈
Δ s Kp Ki Kd, , ,( ) δij s Kp Ki Kd λ, , , ,( )
Gij s λ,( ) GKS s( )∈
Kp glp( ) Kp hlp( )
1 1…8= p 1…5=glp s( ) GKS s( )∈ hlp s( ) GKS s( )∈
[ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ] [ ]
1 2
3 4
51 52
53 54
55 61
62 63
64
( ) 4,3.1 ; ( ) 4,3.9 ;
( ) 6, 4.7 , ( ) 6,5.4
( ) 4,3.1 ; ( ) -3.33,2.56 ,
( ) -2.66,2.03 ( ) -2.35,1.74 ;
( ) -2,1.55 ; ( ) -4,3.9 ;
( ) -3.33,2.56 , ( ) -2.66,2.53
(
p p
p p
p p
p p
p p
p p
p
K g K g
K g K g
K g K g
K g K g
K g K g
K g K g
K g
= − = −
= − = −
= − =
= =
= =
= =
[ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ] [ ]
65
31 32
33 34
35 41
42 43
11 12
1
) -2.35,2.24 ; ( ) -2,1.9 ;
( ) -1.91,2.53 ; ( ) -2.1,2.7
( ) -2.39,2.97 ; ( ) -2.58,3.15 ;
( ) -2.87,3.42 ; ( ) -3,2.3 ;
( ) -3,2.4 ; ( ) -3,2.5 ;
( ) -2,1.5 ; ( ) -2,1.6 ,
(
p
p p
p p
p p
p p
p p
p
K g
K h K h
K h K h
K h K h
K h K h
K h K h
K h
= =
= =
= =
= =
= =
= =
[ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ] [ ]
3 14
15 21
22 23
24 25
53 54
55 61
) -2,1.7 ; ( ) -2,1.8 ;
( ) -2,1.9 ; ( ) -2,1.5 ;
( ) -2.2,1.7 ( ) -2.5,1.9 ;
( ) -2.7,2.1 ; ( ) -3,2.3 ;
( ) -1.33,1.16 ; ( ) -1.33,1.16 ;
( ) -1.33,1.26 ; ( ) -1.33,0.96 ;
(
p
p p
p p
p p
p p
p p
p
K h
K h K h
K h K h
K h K h
K h K h
K h K h
K h
= =
= =
= =
= =
= =
= =
[ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ]
62 63
44 45
51 52
64 65
71 72
73 74
) -1.46,1.13 ( ) -1.66,1.23 ;
( ) 3, 2.6 ; ( ) 3,2.7 ;
( ) -1.33,0.96 ; ( ) -1.33,1.06
( ) -1.8,1.4 ; ( ) -2,1.5 ;
( ) -1.27,1.68 ; ( ) -1.4,1.8
( ) -1.59,1.98 ; ( ) -1.72,
p
p p
p p
p p
p p
p p
K h
K h K h
K h K h
K h K h
K h K h
K h K h
= =
= − = −
= =
= =
= =
= = [ ][ ] [ ][ ] [ ][ ] [ ]
75 81
82 83
84 85
2.1 ;
( ) -1.91,2.28 ; ( ) -1.33,0.96 ;
( ) -2,1.6 ( ) -2,1.6 ;
( ) -2,1.7 ; ( ) -2,1.8
p p
p p
p p
K h K h
K h K h
K h K h
= =
= =
= =
[ ]( ( )) ( ( )), 1,...,8, 1..5.
-1.27,0.96
= = =
=
∩p p ijK s K G s h pKSG
Kp 0.5=Ki Kd,( )
Gij s( )
Ki Kd,( )
143
ROBUST STABILIZATION FOR UNCERTAIN SECOND ORDER TIME-LAG SYSTEM
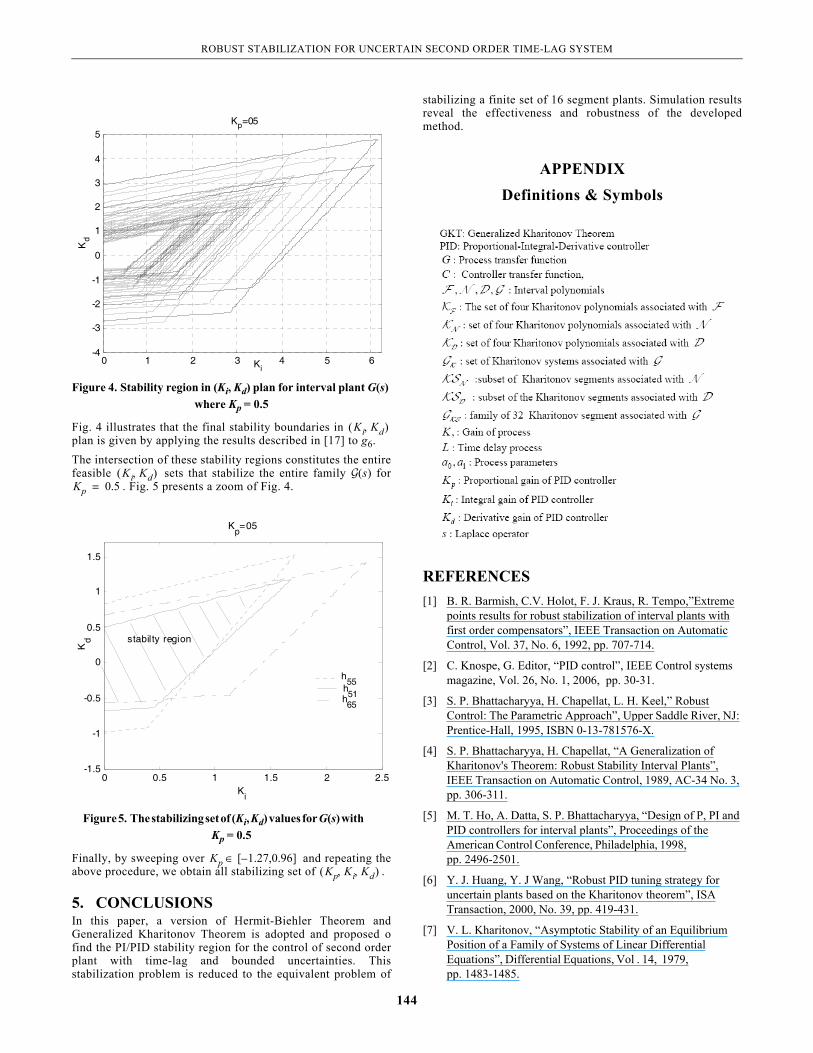
Figure 4. Stability region in (Ki, Kd) plan for interval plant G(s) where Kp = 0.5
Fig. 4 illustrates that the final stability boundaries in plan is given by applying the results described in [17] to g6.The intersection of these stability regions constitutes the entirefeasible sets that stabilize the entire family G(s) for
. Fig. 5 presents a zoom of Fig. 4.
Figure 5. The stabilizing set of (Ki, Kd) values for G(s) with Kp = 0.5
Finally, by sweeping over and repeating theabove procedure, we obtain all stabilizing set of .
5. CONCLUSIONSIn this paper, a version of Hermit-Biehler Theorem andGeneralized Kharitonov Theorem is adopted and proposed ofind the PI/PID stability region for the control of second orderplant with time-lag and bounded uncertainties. Thisstabilization problem is reduced to the equivalent problem of
stabilizing a finite set of 16 segment plants. Simulation resultsreveal the effectiveness and robustness of the developedmethod.
APPENDIXDefinitions & Symbols
REFERENCES[1] B. R. Barmish, C.V. Holot, F. J. Kraus, R. Tempo,”Extreme
points results for robust stabilization of interval plants with first order compensators”, IEEE Transaction on Automatic Control, Vol. 37, No. 6, 1992, pp. 707-714.
[2] C. Knospe, G. Editor, “PID control”, IEEE Control systems magazine, Vol. 26, No. 1, 2006, pp. 30-31.
[3] S. P. Bhattacharyya, H. Chapellat, L. H. Keel,” Robust Control: The Parametric Approach”, Upper Saddle River, NJ: Prentice-Hall, 1995, ISBN 0-13-781576-X.
[4] S. P. Bhattacharyya, H. Chapellat, “A Generalization of Kharitonov's Theorem: Robust Stability Interval Plants”, IEEE Transaction on Automatic Control, 1989, AC-34 No. 3, pp. 306-311.
[5] M. T. Ho, A. Datta, S. P. Bhattacharyya, “Design of P, PI and PID controllers for interval plants”, Proceedings of the American Control Conference, Philadelphia, 1998, pp. 2496-2501.
[6] Y. J. Huang, Y. J Wang, “Robust PID tuning strategy for uncertain plants based on the Kharitonov theorem”, ISA Transaction, 2000, No. 39, pp. 419-431.
[7] V. L. Kharitonov, “Asymptotic Stability of an Equilibrium Position of a Family of Systems of Linear Differential Equations”, Differential Equations, Vol . 14, 1979, pp. 1483-1485.
0 1 2 3 4 5 6-4
-3
-2
-1
0
1
2
3
4
5
Ki
Kd
Kp=05
Ki Kd,( )
Ki Kd,( )Kp 0.5=
0 0.5 1 1.5 2 2.5-1.5
-1
-0.5
0
0.5
1
1.5
Ki
Kd
Kp=05
stabilty region
h55
h51h65
Kp 1.27– 0.96[ , ]∈Kp Ki Kd, ,( )
144

ROBUST STABILIZATION FOR UNCERTAIN SECOND ORDER TIME-LAG SYSTEM
[8] S. I. Niculescu, “Delay effects on stability”, Springer, London, 2001, ISBN: 1-85233-291-3.
[9] G. J. Silva, A. Datta, S. P. Bhattacharyya, “Stabilization of Time Delay Systems”, Proceedings of the American Control Conference, 2000, pp. 963-970.
[10] G. J. Silva, A. Datta, S. P. Bhattacharyya, “PI stabilization of first-order systems with time-delay”, Automatica, Vol. 37, No. 12, 2001, pp. 2025-2031.
[11] G. J. Silva, A. Datta, S. P. Bhattacharyya, “Stabilization of First-order Systems with Time Delay using the PID controller”, Proceedings of the American Control Conference, 2001, pp. 4650-4655.
[12] G.J. Silva, A. Datta, S. P. Bhattacharyya, “PID controllers for time delay systems”, Springer, London, 2005, ISBN:0-8176-42668.
[13] N.Tan, I. Kaya, C. Yeroglu, D. P. Atherton, “Computation of stabilizing PI and PID controllers using the stability boundary locus”, Energy Conversion and Management, Vol. 47, No. 18-19, 2006, pp. 3045-3058.
[14] Q.C. Zhong, “Robust control of time delay system”, Springer, London, 2006, ISBN: 1846282640.
[15] B. M. Patre, P. J. Deore, “Robust stability and performance for interval process plants”, ISA Transactions, Vol. 46, No. 3, 2007, pp. 343-349.
[16] R. Farkh, K. Laabidi, M. Ksouri, “PI control for second order delay system with tuning parameter optimization”, International journal of electrical, computer and system engineering, Vol. 3, 2009, pp. 1-7.
[17] R. Farkh, K. Laabidi, M. Ksouri, “Computation of all stabilizing PID gains for second order delay system”; Mathematical Problem in Engineering, Article ID 212053, 17 pages, 2009, doi:10.1155/2009/212053.
[18] V. A. Oliveira, L.V. Cossi, M. C. M. Teixeira, A. M. F. Silva, “Synthesis of PID controllers for a class of time delay systems”, Automatica (2009), doi:10.1016/ j.automatica. 2009.03.018
[19] D. J. Wang, “Synthesis of PID controllers for high-order plants with time-delay”, Journal of Process Control (2009, in press).
[20] Jian’an Fang, Da Zheng, Zhengyun Ren, “Computation of stabilizing PI and PID controllers by using Kronecker summation method”, Energy Conversion and Management, Vol. 50, No. 7, 2009, pp. 1821-1827.
[21] M. S. Mahmoud, “Stabilization of time-delay systems by PID controllers”, International Multi-Conference on Systems, signals and devices, SSD’2009, Tunisia, 2009, pp. 1-6.
[22] M. S. Mahmoud, M. Dekker, “Robust control and filtering for time-delay systems”, New York, 2000, ISBN 0-8247-0327-8
[23] M.S. Mahmoud, “Robust control of discrete systems with uncertain parameters and unknown delays”, Automatica Vol. 36, No. 4, 2000, pp. 627-635.
[24] S. Xu, T. Chen, “Robust control for uncertain stochastic systems with state delay”, IEEE Transaction on Automatic Control, Vol. 47, 2002, pp. 2089-2094.
[25] S. Xu, J. Lam, C. Yang, “ and positive real control for linear neutral delay systems”, IEEE Transaction on Automatic Control, Vol. 46, 2001, pp. 1321-1326.
[26] S. Xu, J. Lam, C. Yang, “Quadratic stability and stabilization of uncertain linear discrete-time systems with state delay”, Systems Control Letter, Vol. 43, 2001, pp. 77-84.
[27] S. Xu, J. Lam, C. Yang, “Robust control for discrete singular systems with state delay and parameter uncertainty”, Dyn. Continuous Discrete Impulsive Systems, Vol. 9, 2002, pp. 539-554.
[28] S. Xu, P. Van Dooren, R. Stefan, J. Lam, “Robust stability and stabilization for singular systems with state delay and parameter uncertainty”, IEEE Transaction on Automatic Control, Vol. 47, 2002, pp. 1122-1128.
[29] H. Rotstein, J. Bandoni, A. Desages, J. Ramagnoli, “Mathematical programming with uncertain constraints- application to robust control”, Computer Chemical Engineering, Vol. 14, 1990, pp. 373-379
Biographies
Rihem Farkh was born in Tunis, Tunisia, in 1982. Hereceived the engineering degree in electrical engineering andthe MSc degree in Control and Signal Processing from theNational School Engineering of Tunis in 2006 and 2007. InDecember 2007, he began pursuing his PhD degree inDepartment of Electrical Engineering at National SchoolEngineering of Tunis. His research interests include PIDcontrol, robust control and time-delay systems.
Kaouther Laabidi was born in Tunis, Tunisia. She receivedthe MSc degree in Control from the Higher School of sciencesand Techniques of Tunis in 2000 and the PhD degree inelectrical engineering in 2005 from the National SchoolEngineering of Tunis. She is currently preparing the abilitydegree in” Research unit on Systems Analysis and Control”,her research interests include Identification and control ofcomplex systems.
Mekki Ksouri received his BSc degree in physics from theFaculty of Sciences of Tunis in 1971 and the Diplomed'Ingenieur from the Ecole Superieure d'Electricite, Paris in1973. He received the Diplome de Docteur Ingenieur and theDiplome de Docteur d'Etat from the Universite de Paris VIrespectively in 1975 and 1977. He received the OutstandingContribution Award for Leadership in the organization of theCIFA 2004 Symposium, the Chevalier dans l’Ordre des PalmesAcademiques, France (2002), Outstanding Contribution AwardIEEE SMC 1998 and the Ordre National du Merite del’Education, Tunisia (1997). He is a senior member of IEEE.His research interests include identification and control ofnonlinear systems and industrial applications of advancedcontrol. He is the author or co-author of more than 150 papersin international conferences and journals. He has alsopublished six books.
H∞
H∞
H∞
H∞
145
Related Documents





![I. Radovi u časopisima sa visokim impact faktorom ... · [32] Stojanović S.B., D.Lj. Debeljković, Quadratic stability and stabilization of uncertain linear discrete-time systems](https://static.cupdf.com/doc/110x72/5f0d1bdc7e708231d438b8b7/i-radovi-u-asopisima-sa-visokim-impact-faktorom-32-stojanovi-sb-dlj.jpg)





