A Nonlinear Robust Aerodynamic Control Systems, an Application to Missile Control System Abdulhmeed Mohamed Elhassan June 2012 Thanks to Dr. Elhassan Bashier Elaàgab

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A Nonlinear Robust Aerodynamic Control Systems, an Application to Missile Control System
Abdulhmeed Mohamed ElhassanJune 2012
Thanks to Dr. Elhassan Bashier Elaàgab
Objectives
Designing a nonlinear controller by scheduling linear H∞ controller designs at four constant operating conditions bounding the operating range. That is ,the linear designs based on linearization of the missile model at four distinct operating conditions and application of an H∞software tool (MATLAB) to calculate fourrespective linear dynamic controllers

SpecificationsSpecifications




Missile ModelMissile Model

Linearization in Modern ControlLinearization in Modern ControlFeedback Linearization MethodFeedback Linearization Method
StateState--Dependent Dependent RiccatiRiccati Equation MethodEquation Method
Quickest Descent MethodQuickest Descent Method
Recursive BackRecursive Back--stepping Methodstepping Method
Gain Scheduling methodGain Scheduling method

Feedback Linearization MethodFeedback Linearization Methodtransformation of the nonlinear system into an equivalent lineartransformation of the nonlinear system into an equivalent linear system system
through a change of variables and a suitable control inputthrough a change of variables and a suitable control input
AdvantagesAdvantages
SimpleSimple
DisadvantagesDisadvantagesa precise knowledge of the a precise knowledge of the system model is required in system model is required in order to synthesize the order to synthesize the nonlinear controller,nonlinear controller,the system zero dynamics the system zero dynamics must be stable,must be stable,the system states must be the system states must be measurable.measurable.

StateState--Dependent Dependent RiccatiRiccati Equation MethodEquation Method
AdvantagesAdvantagesavoiding intensive avoiding intensive interaction interaction calculationcalculation
DisadvantagesDisadvantagesis computationally is computationally demanding, requiring demanding, requiring the solution of a 7*7 the solution of a 7*7 algebraic algebraic RiccatiRiccatiequation at each equation at each samplesample

Recursive Recursive BacksteppingBackstepping MethodMethod
AdvantagesAdvantagesimposes the desired imposes the desired properties of stability properties of stability by fixing the by fixing the functions initially, functions initially, then by calculating then by calculating the other functions the other functions in a recursive wayin a recursive way
DisadvantagesDisadvantages

GAIN SCHEDULINGGAIN SCHEDULING Advantages.Advantages.
1.1. Employs powerful linear design tools on difficult Employs powerful linear design tools on difficult nonlinear problems.nonlinear problems.
2.2. Most performance specifications are in linear terms, Most performance specifications are in linear terms, involving a mixture of timeinvolving a mixture of time--domain and frequencydomain and frequency--domain specifications.domain specifications.
3.3. Carried out using the physical variables . (nonlinear Carried out using the physical variables . (nonlinear control approaches involve coordinate control approaches involve coordinate transformations).transformations).
4.4. Gain scheduling enables a controller to respond Gain scheduling enables a controller to respond rapidly to changing operating conditions (which rapidly to changing operating conditions (which themselves must vary themselves must vary ‘‘slowlyslowly’’ in the LPV or Quasiin the LPV or Quasi--LPV approach; The computational burden of LPV approach; The computational burden of linearization scheduling approaches is often much linearization scheduling approaches is often much less than for other nonlinear design approaches.less than for other nonlinear design approaches.
5.5. QuasiQuasi--LPV approaches offer guaranteed stability and LPV approaches offer guaranteed stability and performance properties.performance properties.

GAIN SCHEDULINGGAIN SCHEDULING DisadvantagesDisadvantages
QuasiQuasi--LPV approaches are computationally LPV approaches are computationally intensive.intensive.
Gain scheduling often involves several ad hoc Gain scheduling often involves several ad hoc steps, beginning with problem formulation. This steps, beginning with problem formulation. This can be suitable in simple situations, but can be suitable in simple situations, but increasingly troublesome as more complicated increasingly troublesome as more complicated controllers are designed.controllers are designed.
Linearization gain scheduling stability can be Linearization gain scheduling stability can be assured only locally and in a `slowassured only locally and in a `slow--variation variation setting, and typically there are no performance setting, and typically there are no performance guarantees.guarantees.

GAIN SCHEDULINGGAIN SCHEDULING
Two methodsTwo methodsClassical oneClassical one
(y-y1)/(x-x1) = (y2-y1)/(x2-x1)

GAIN SCHEDULINGGAIN SCHEDULING
QuasiQuasi--LPVLPV
the plant dynamics are rewritten to hide nonlinearities as time-varying parameters that are then used as scheduling variables.

Steps in Designing Gain ScheduledSteps in Designing Gain Scheduled ControllerController
compute a linear parametercompute a linear parameter--varying varying model for the plant.model for the plant.use linear design controller techniques use linear design controller techniques for the LPV plant modelfor the LPV plant modelimplementing family of linear controllers implementing family of linear controllers such that the controller coefficients such that the controller coefficients (gains) are varied (scheduled) according (gains) are varied (scheduled) according to the current value of the scheduling to the current value of the scheduling variables.variables.performance assessment.performance assessment.


Controller DesignController Design
parameter range:parameter range:
A1min =.5 A1max =4; A2min =0 A2max =106;

parameter range and rate of parameter range and rate of variation of timevariation of time--varying varying
pv = pvec('box',[A1min
A1max ; A2min A2max ])

affine model:affine model:
• pdP = psys(pv,[s0 s1 s2])• s0 = ltisys([0 1;0 0],[0;1],[-1 0;0 1],[0;0])• s1 = ltisys([-1 0;0 0],[0;0],zeros(2),[0;0],0)
% A1_al• s2 = ltisys([0 0;-1 0],[0;0],zeros(2),[0;0],0)
% A2_als0 , s1 , and s2 are given system matrices

form the plant interconnection and form the plant interconnection and append the shaping filtersappend the shaping filters
[pdP,r] = sconnect('r','e=r-GP1;K','K:e;G(2)','G:K',pdG);
Paug = smult(pdP,sdiag(w1,w2,eye(2)))
For loop-shaping purposes, we must form the augmented plant

FiltersFilters
• Using Magshape GUI in matlab and the command
• LPF W1(s) = 2.01/ (s + 0.201)
• HPF W2(s) = (9.678s3 + 0.029s2)/ (s3 + 1.206e4s2 + 1.136e7s + 1.066e10)
perform the gainperform the gain--scheduled scheduled controllercontroller
• [gopt,pdK] = hinfgs(Paug,r)

simulate the step response of the gainsimulate the step response of the gain--scheduled systemscheduled system
• spiral trajectory• A1α(t) = 2.25 + 1.70 e–4t cos(100 t)• A2α(t) = 50 + 49 e–4t sin(100 t)• function p = spiral(t)p = [2.25 + 1.70*exp(-4*t).*cos(100*t) ; ...50 + 49*exp(-4*t).*sin(100*t)];

plot the closedplot the closed--loop step responseloop step response
[t,x,y]=pdsimul(pCL,'spiralt',0.5)where pcl is the polytopic representation of
the closed-loop system
plot(t,1-y(:,1))
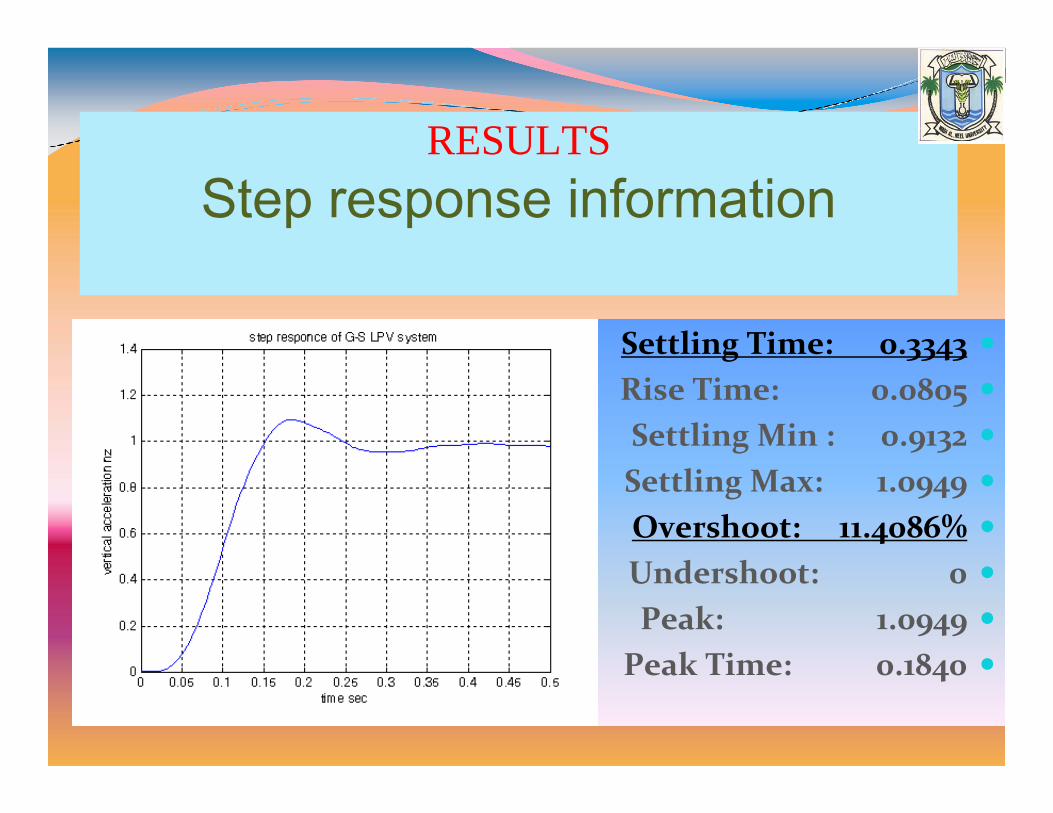
RESULTSStep response information
Settling Time: 0.3343Rise Time: 0.0805Settling Min : 0.9132Settling Max: 1.0949Overshoot: 11.4086%Undershoot: 0Peak: 1.0949
Peak Time: 0.1840
Related Documents











