Robotics: Evolution, Technology and Applications By: Hamid D. Taghirad Professor Advanced Robotics and Automated Systems (ARAS) Dept. of Electrical Engineering K.N. Toosi University of Technology Advance Robotic & Automated Systems (ARAS) Department of Electrical Engineering – K. N. Toosi U. of Tech.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Robotics: Evolution, Technology and Applications
By: Hamid D. Taghirad
Professor
Advanced Robotics and
Automated Systems (ARAS)
Dept. of Electrical Engineering
K.N. Toosi University of Technology
Advance Robotic & Automated Systems (ARAS)
Department of Electrical Engineering – K. N. Toosi U. of Tech.
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 2
Outline
• Introduction
Robotics: a human dream
Robotic evolution
Robot definition
• Robot Classification
Kinematics
Arm configuration
• Robotic Application Parallel Manipulators
CDRPM
• Robotic Application SkyCam
RoboCrane
Giant Telescopes
KNTU CDRPM
• Parallel Robots
Course contents
Textbooks
Marking Scheme
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 3
Introduction
• Human Dream: Build a human clown
Human Arm Robot manipulator
Human Leg Mobile robot
Legged robot
Human Eye Machine vision
Hand-eye task Visual servoing
Listen and talk Sound recognition
Think and decide Artificial intelligence
…
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 4
Introduction
• Dream comes true by
Robots as workers: Manipulators
Manipulator Worker arm
• Robot Definition:
A motorized computer-controlled machine that
can be programmed to do a variety of tasks
especially repeatable and tiresome ones.
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 5
Introduction
• Robot Evolution 1921: Robota introduced in Karel Capek theatre, as a
slave performing compulsory tasks
1962: 1st Robot, Unimation Inc. pneumatically driven
1975-1997: 1st Generation Robot, programmable
robots in a well known environment (servo-controlled,
PLC)
1990- current: 2nd Generation Robot, Intelligent robot
in an unstructured environment (Artificial intelligent)
1995-current: 3rd Generation Robot, Advanced in
structures (Parallel Robots), and in control.
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 6
Introduction
• Manipulator components
Arm Links and joints
Hand End effector
Actuators and drive
Sensors and transducers
Computer and Electronics
Education via software
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 7
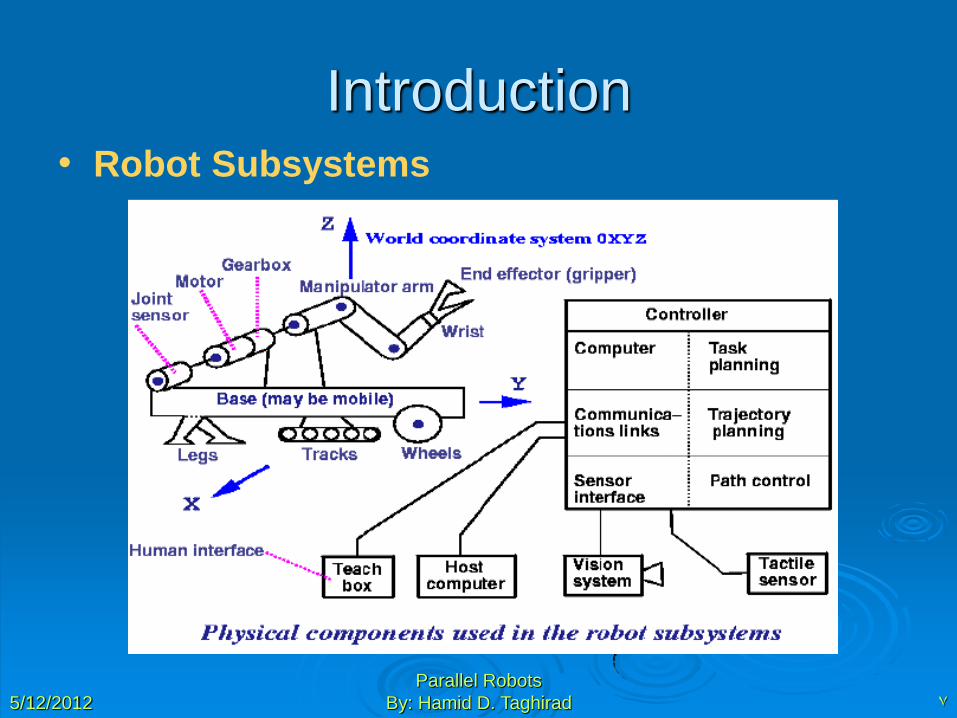
Introduction • Robot Subsystems
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 8
Robot Classification
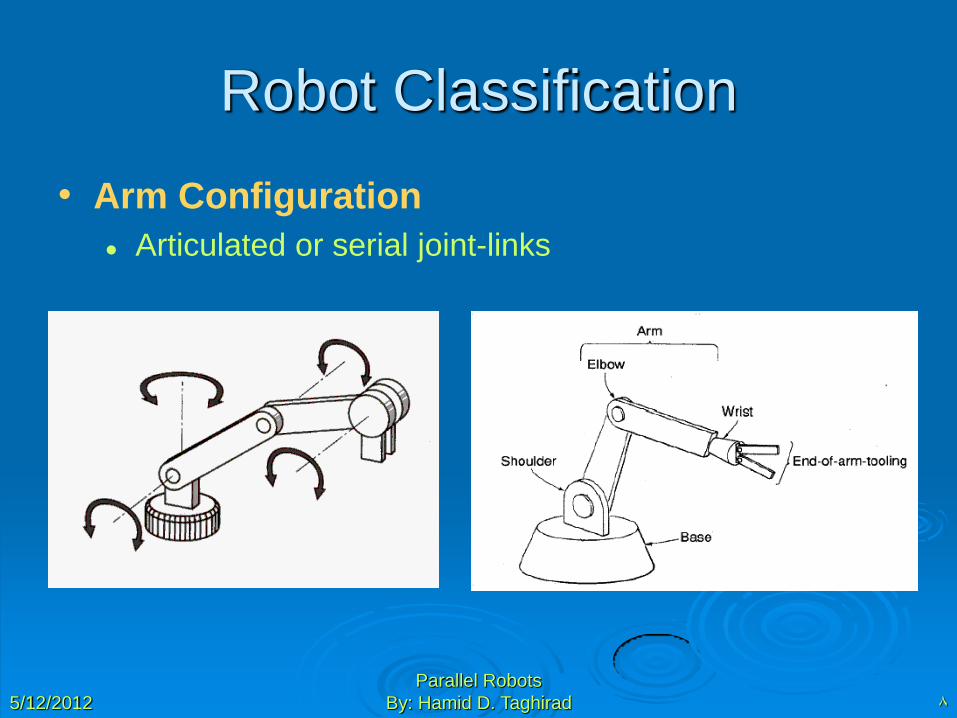
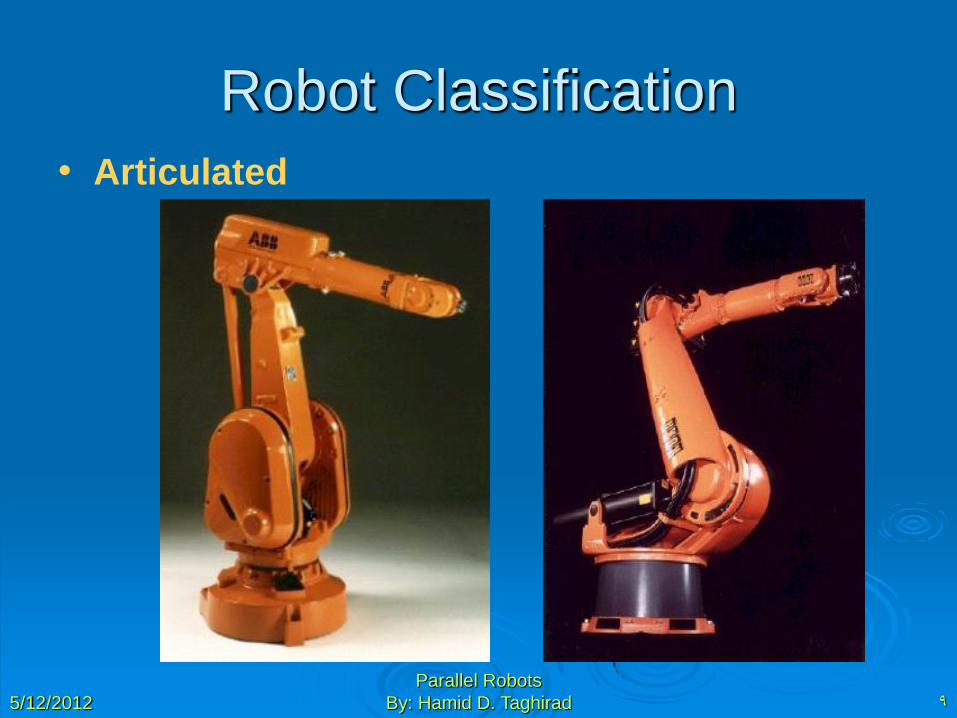
• Arm Configuration
Articulated or serial joint-links
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 9
Robot Classification
• Articulated
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 10
Robot Classification
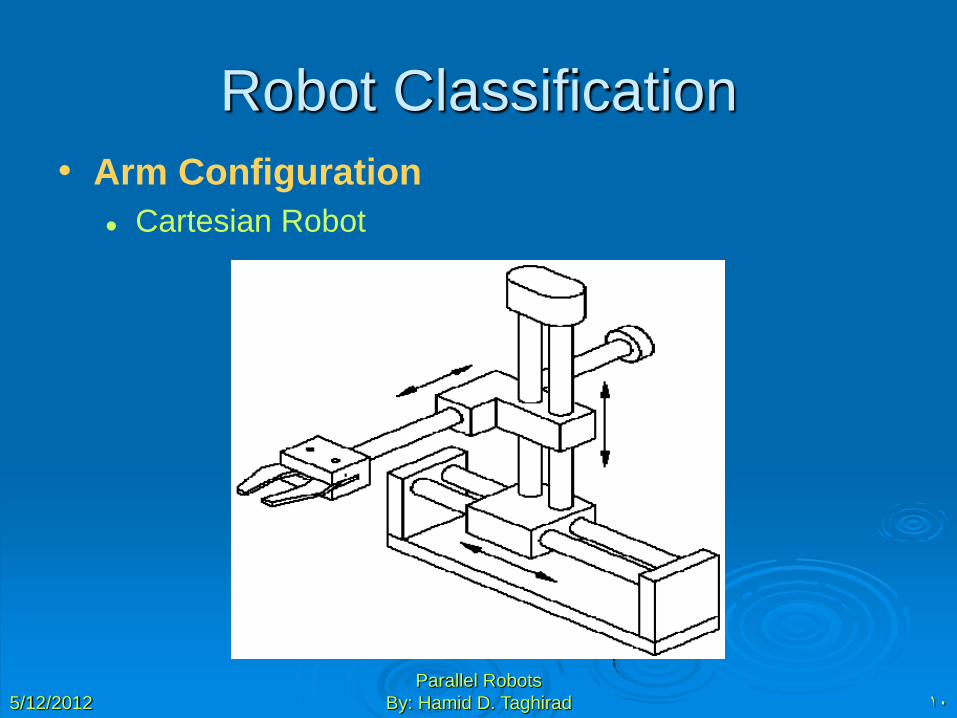
• Arm Configuration
Cartesian Robot
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 11
Robot Classification
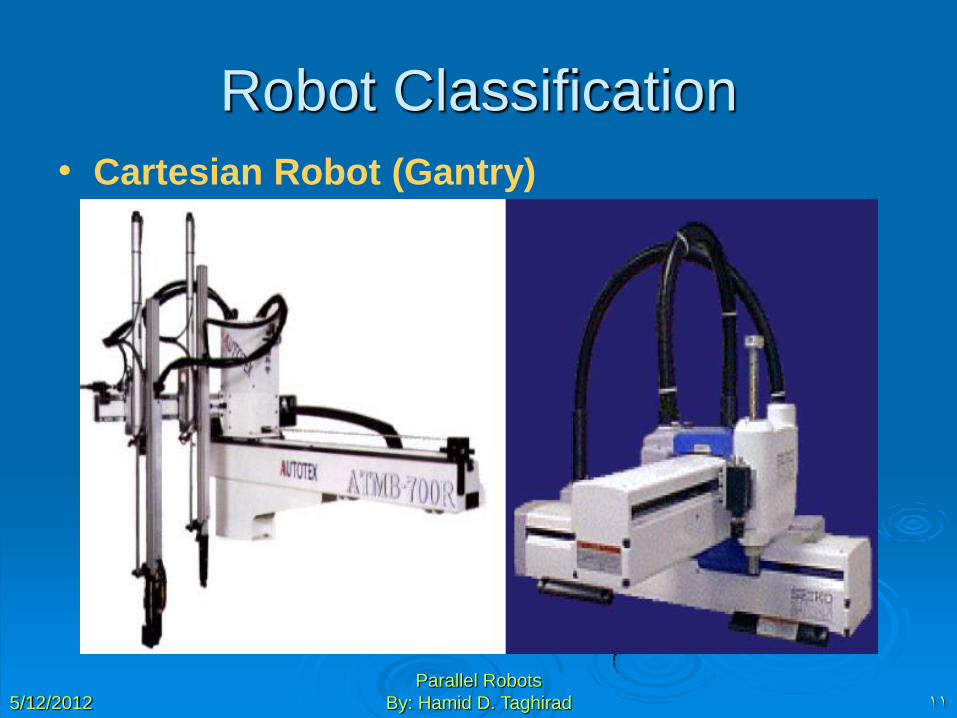
• Cartesian Robot (Gantry)
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 12
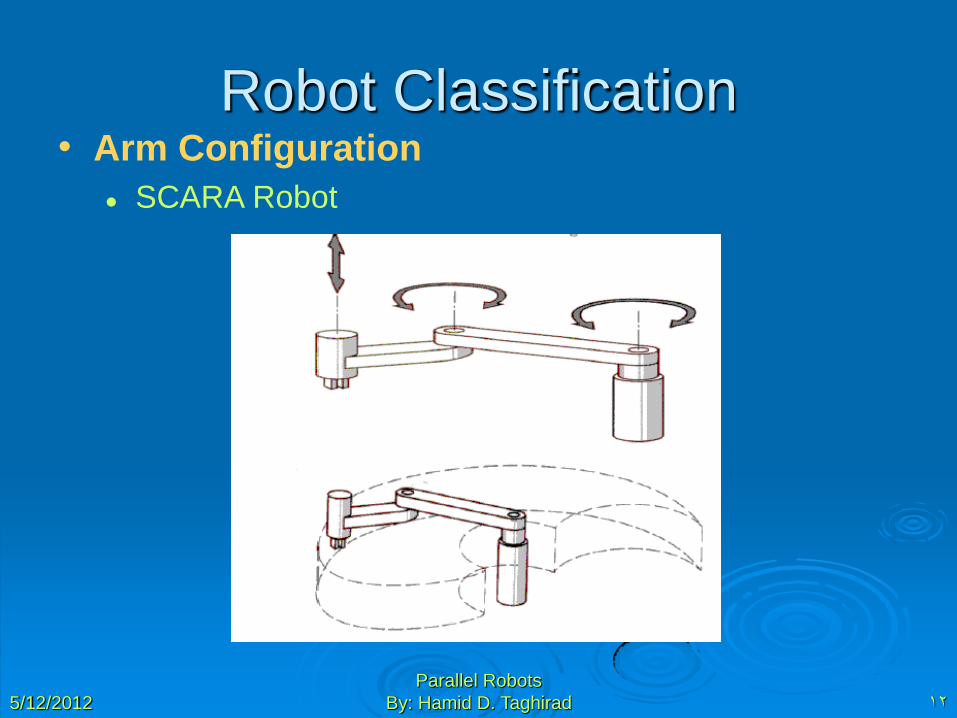
Robot Classification • Arm Configuration
SCARA Robot
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 13
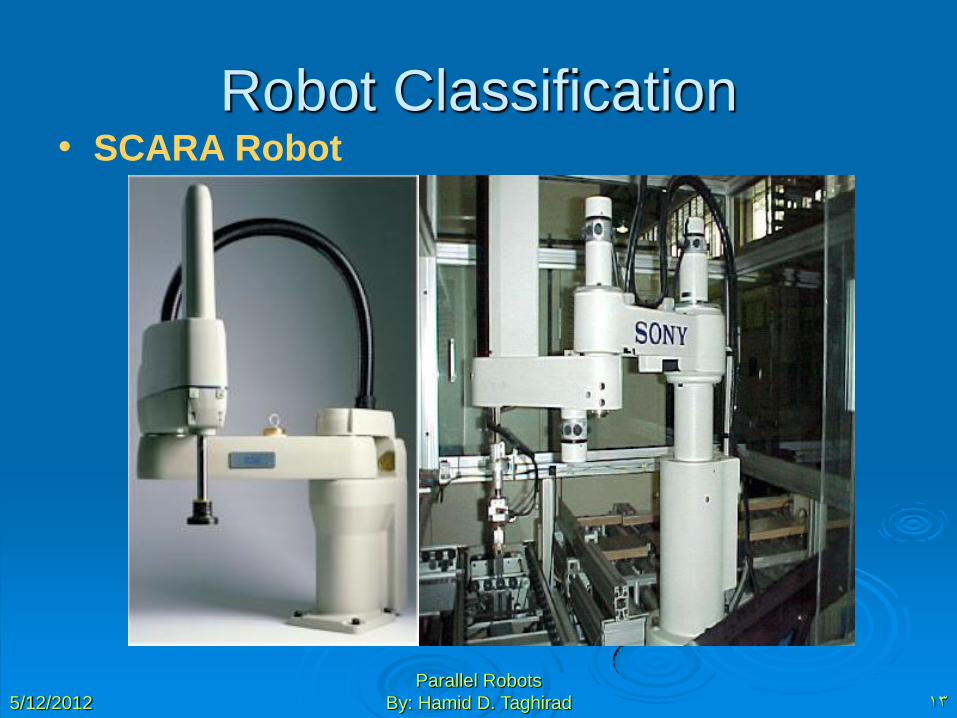
Robot Classification • SCARA Robot
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 14
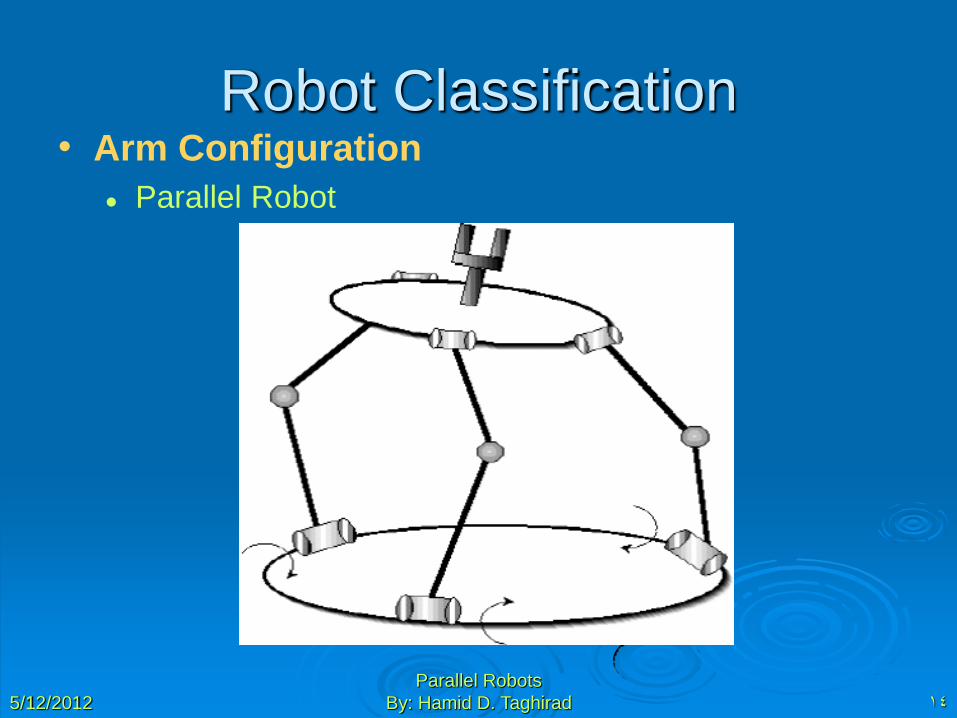
Robot Classification • Arm Configuration
Parallel Robot
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 15
Robot Classification • Arm Configuration
Parallel Robot
Parallel Robots
By: Hamid D. Taghirad
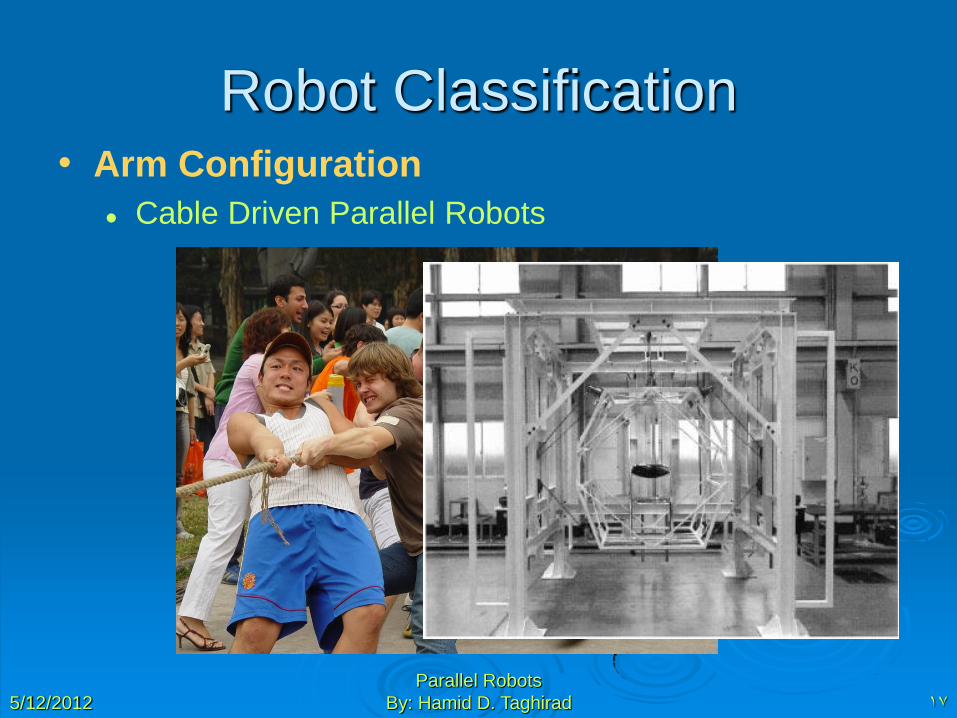
Robot Classification • Arm Configuration
Parallel Robot: Delta Robot
5/12/2012 16
Parallel Robots
By: Hamid D. Taghirad
Robot Classification • Arm Configuration
Cable Driven Parallel Robots
5/12/2012 17
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 18
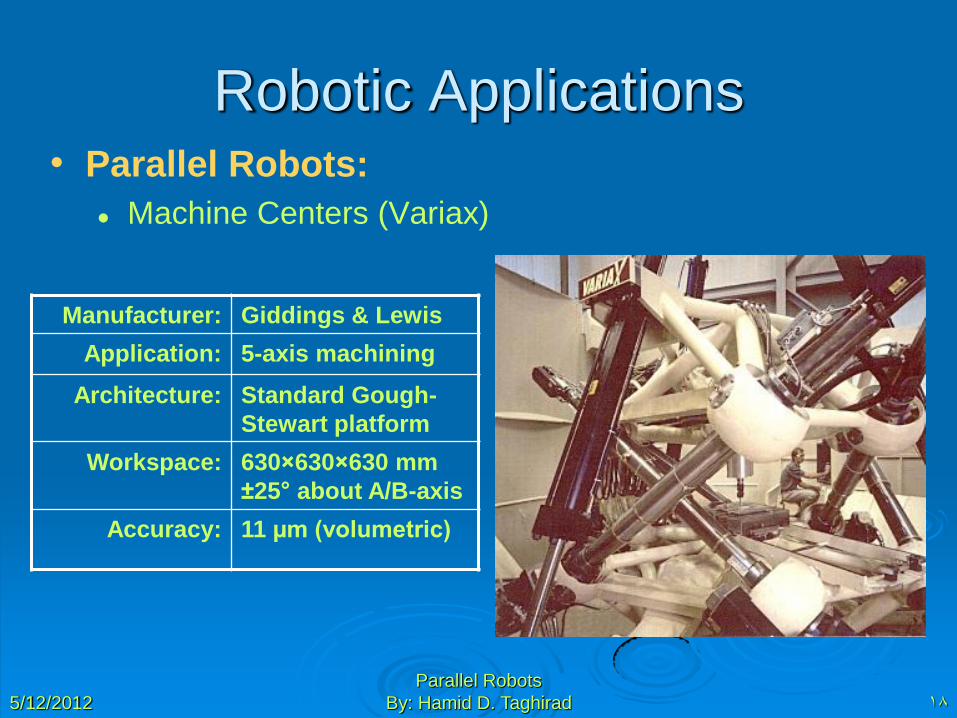
Robotic Applications • Parallel Robots:
Machine Centers (Variax)
Manufacturer: Giddings & Lewis
Application: 5-axis machining
Architecture: Standard Gough-
Stewart platform
Workspace: 630×630×630 mm
±25° about A/B-axis
Accuracy: 11 µm (volumetric)
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 19
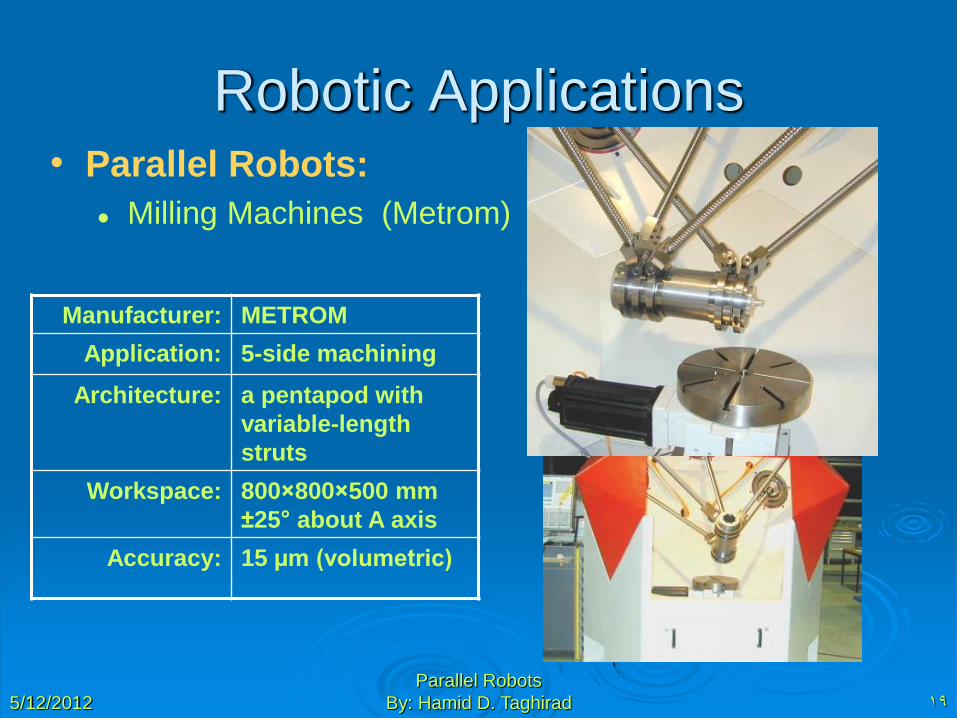
Robotic Applications • Parallel Robots:
Milling Machines (Metrom)
Manufacturer: METROM
Application: 5-side machining
Architecture: a pentapod with
variable-length
struts
Workspace: 800×800×500 mm
±25° about A axis
Accuracy: 15 µm (volumetric)
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 20
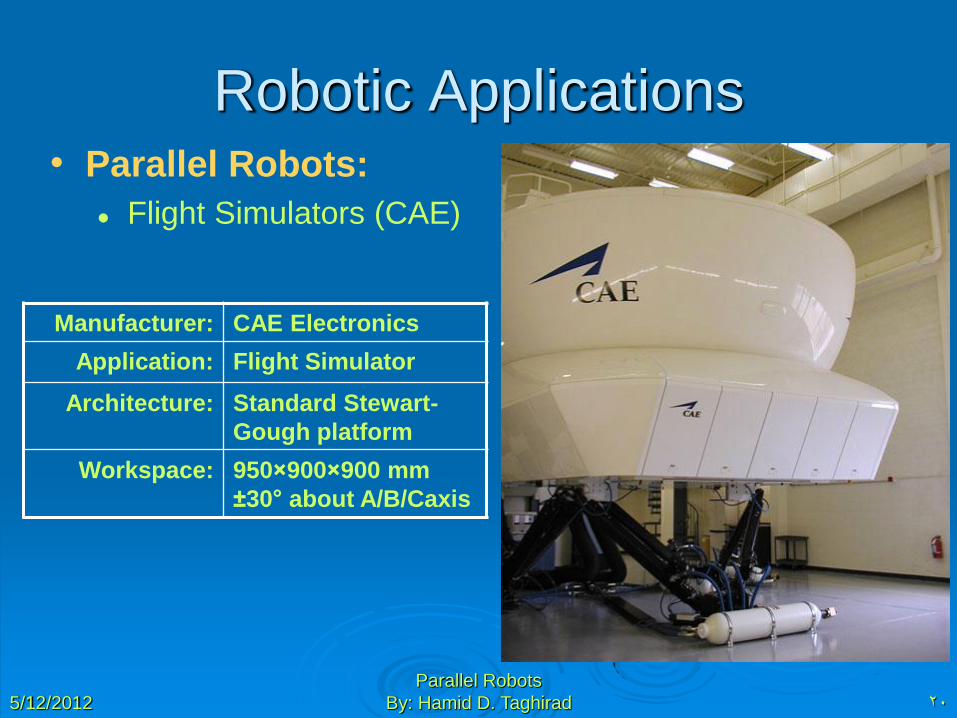
Robotic Applications • Parallel Robots:
Flight Simulators (CAE)
Manufacturer: CAE Electronics
Application: Flight Simulator
Architecture: Standard Stewart-
Gough platform
Workspace: 950×900×900 mm
±30° about A/B/Caxis
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 21
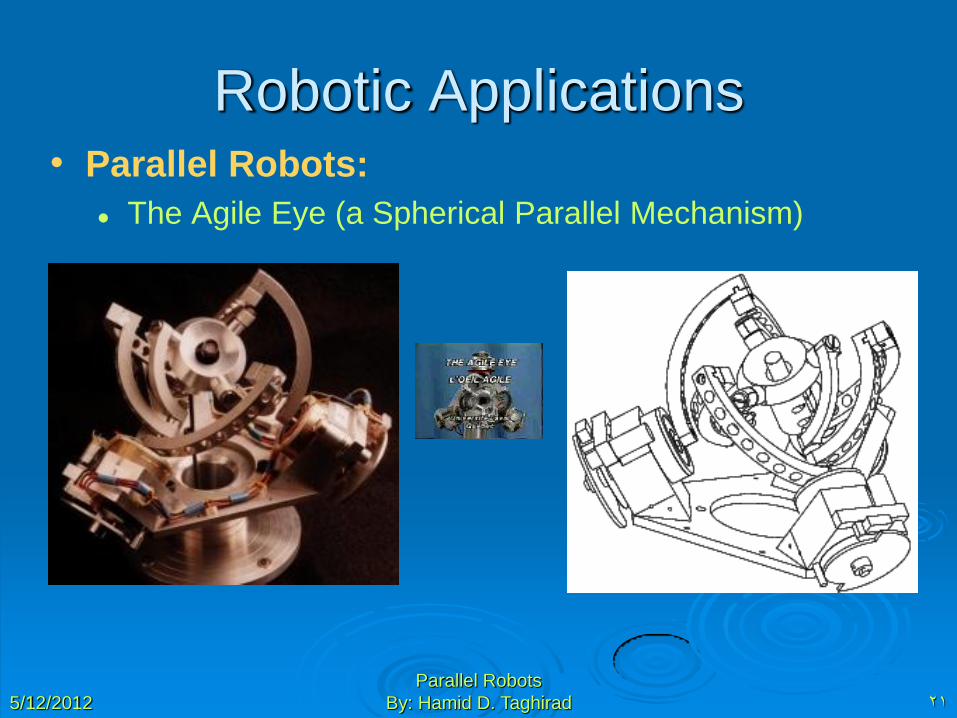
Robotic Applications • Parallel Robots:
The Agile Eye (a Spherical Parallel Mechanism)
Parallel Robots
By: Hamid D. Taghirad
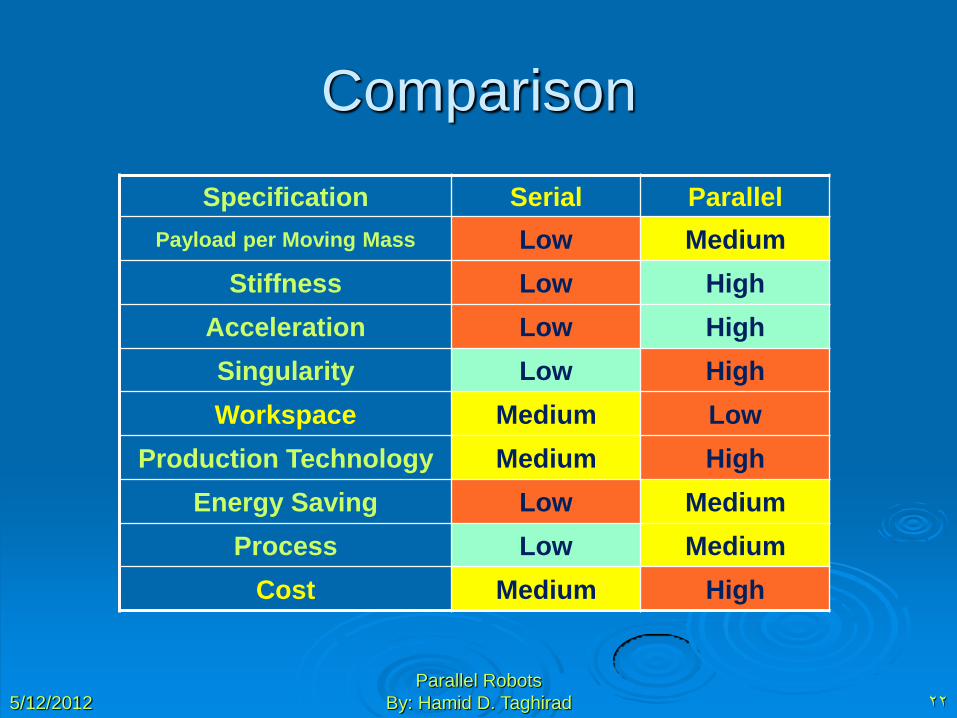
Comparison
5/12/2012 22
Specification Serial Parallel
Payload per Moving Mass Low Medium
Stiffness Low High
Acceleration Low High
Singularity Low High
Workspace Medium Low
Production Technology Medium High
Energy Saving Low Medium
Process Low Medium
Cost Medium High
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 23
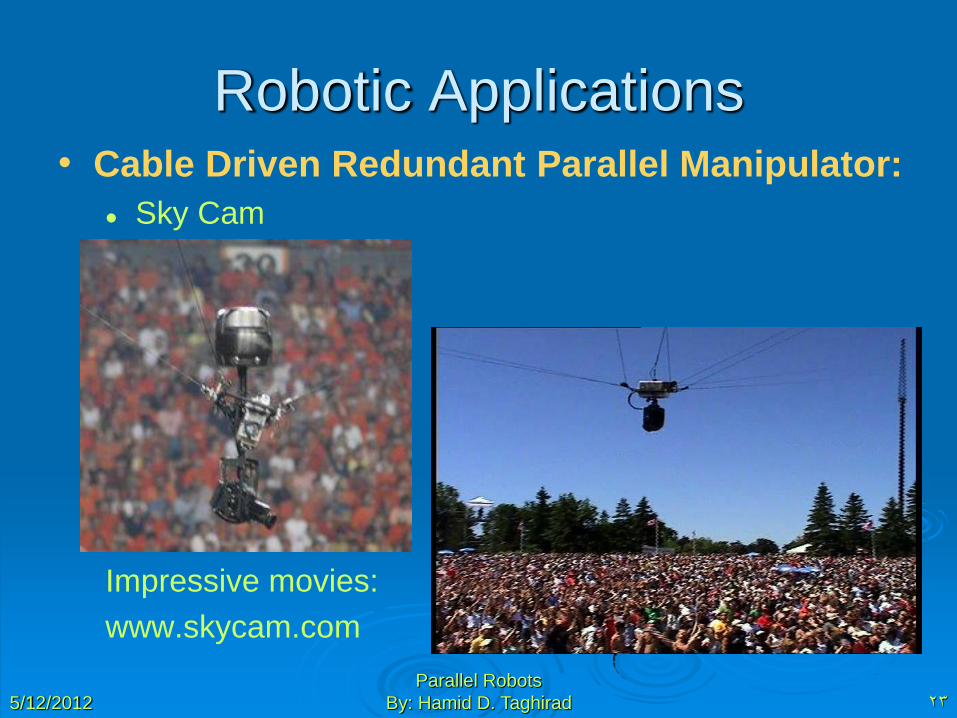
Robotic Applications • Cable Driven Redundant Parallel Manipulator:
Sky Cam
Impressive movies:
www.skycam.com
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 24
Robotic Applications • Cable Driven Redundant Parallel Manipulator:
Sky Cam
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 25
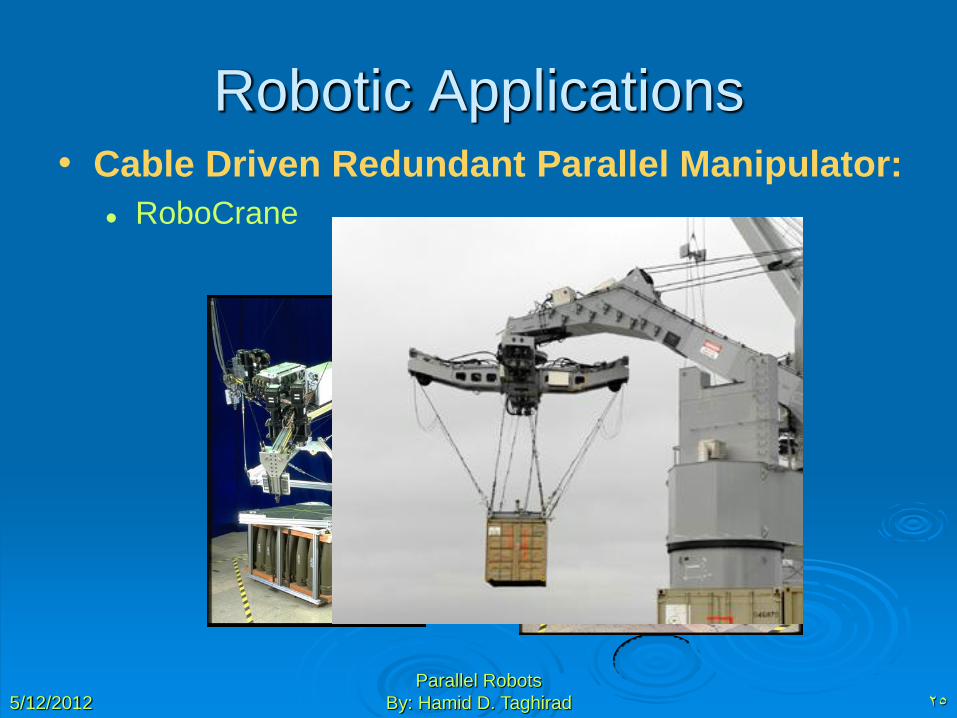
Robotic Applications • Cable Driven Redundant Parallel Manipulator:
RoboCrane
Parallel Robots
By: Hamid D. Taghirad
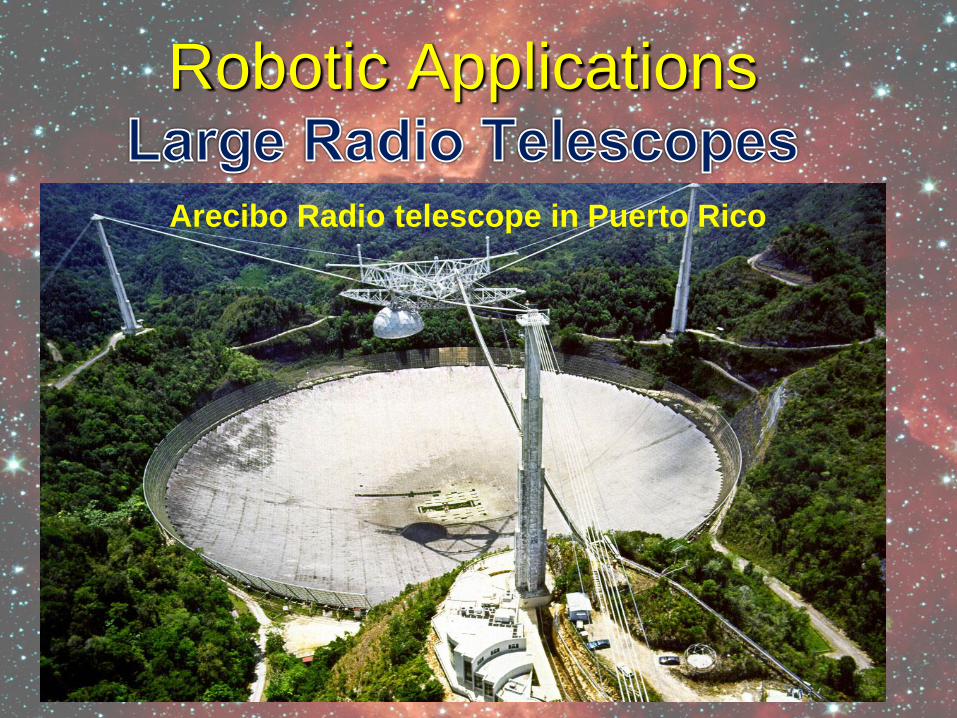
Robotic Applications
Arecibo Radio telescope in Puerto Rico
Parallel Robots
By: Hamid D. Taghirad
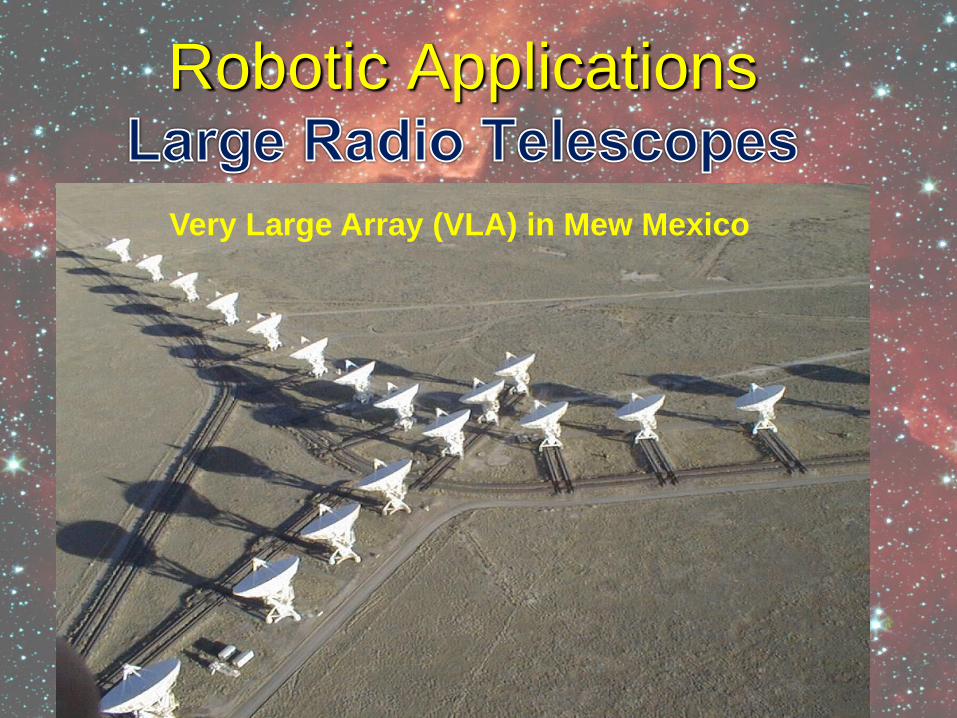
Robotic Applications
Very Large Array (VLA) in Mew Mexico
Parallel Robots
By: Hamid D. Taghirad
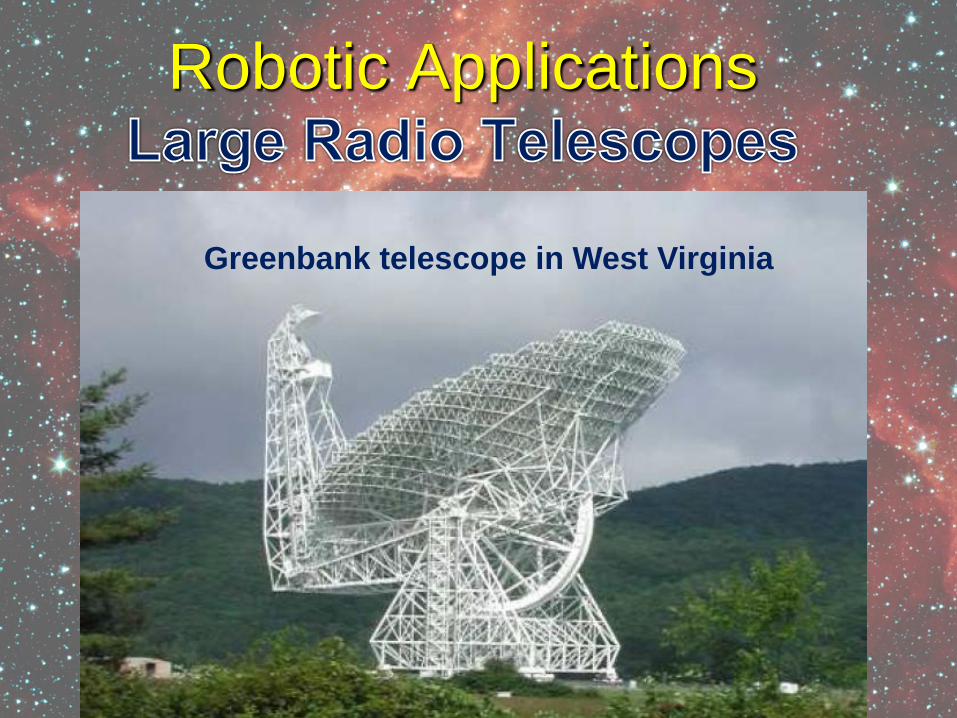
Robotic Applications
Greenbank telescope in West Virginia
Parallel Robots
By: Hamid D. Taghirad
Robotic Applications
New Generation of Giant Radio telescopes
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 30
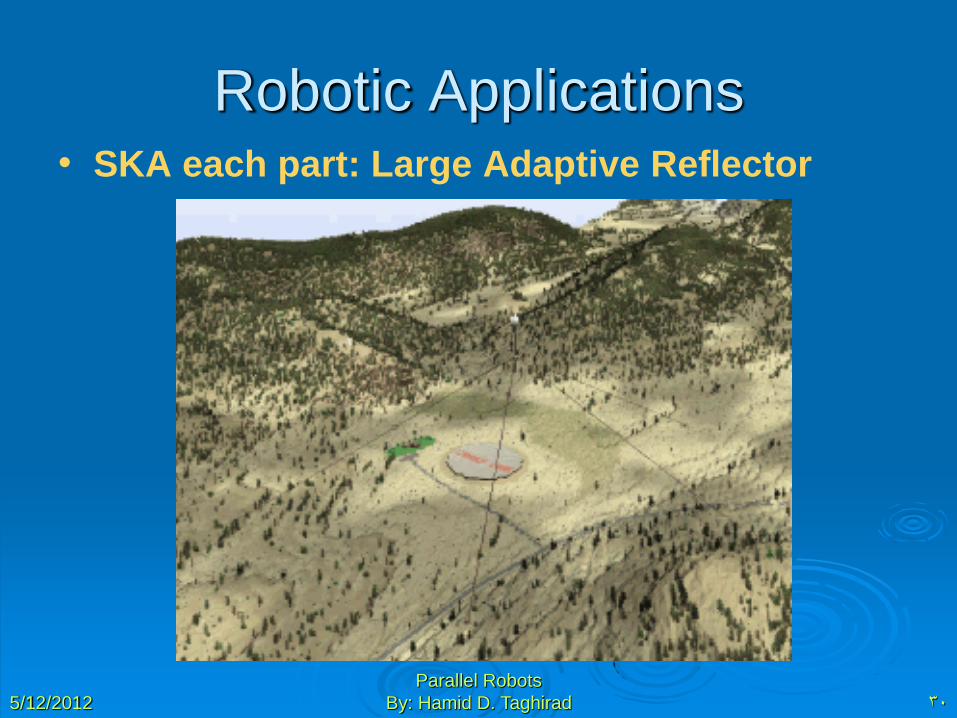
Robotic Applications • SKA each part: Large Adaptive Reflector
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 31
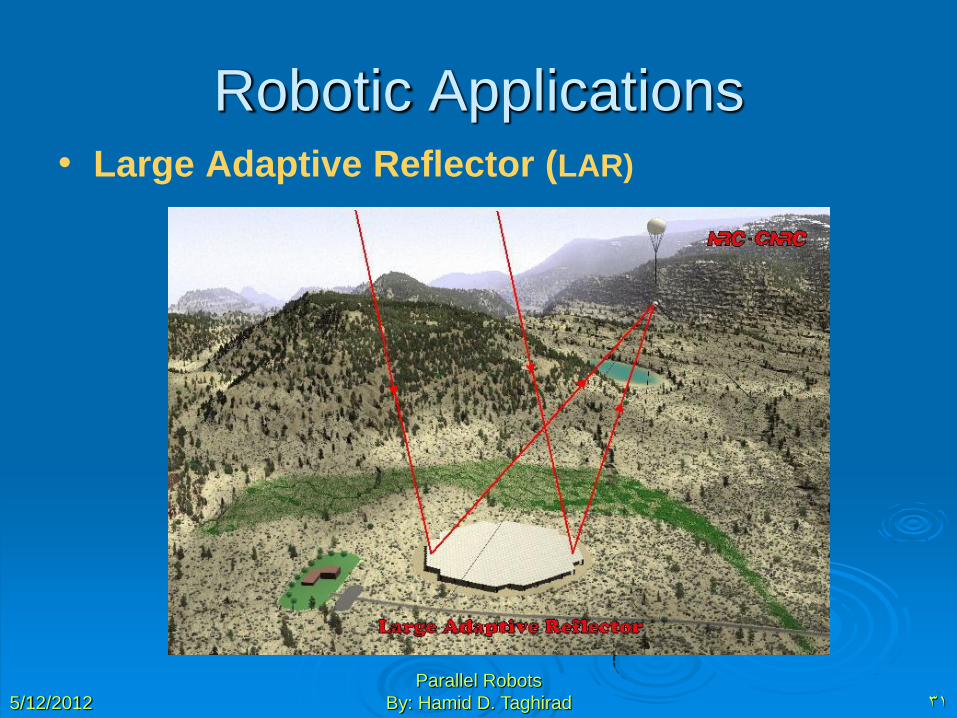
Robotic Applications • Large Adaptive Reflector (LAR)
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 32
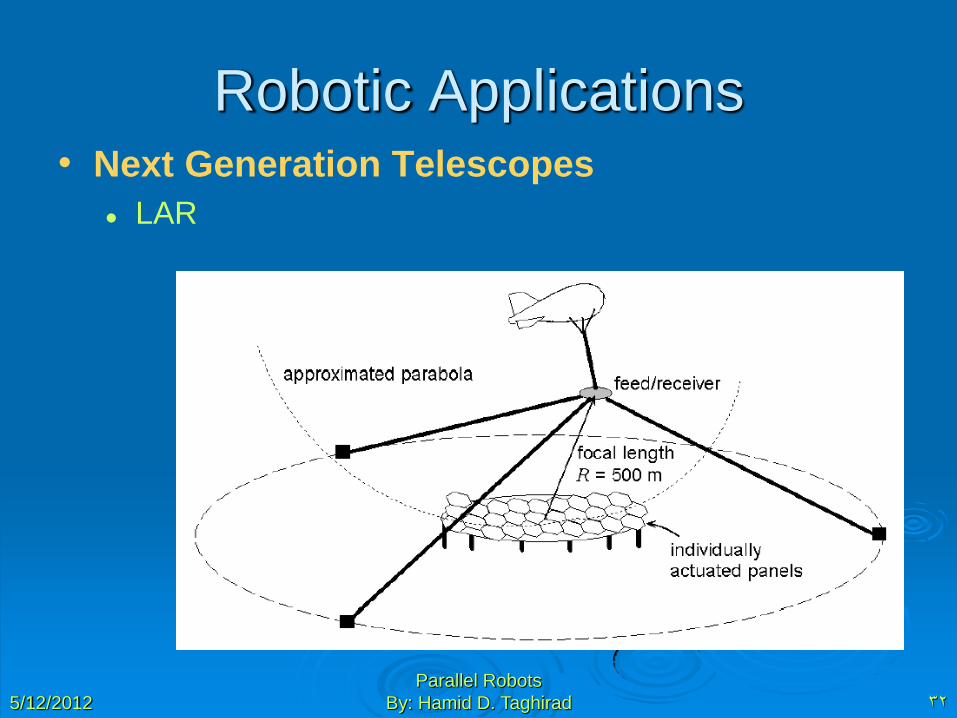
Robotic Applications • Next Generation Telescopes
LAR
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 33
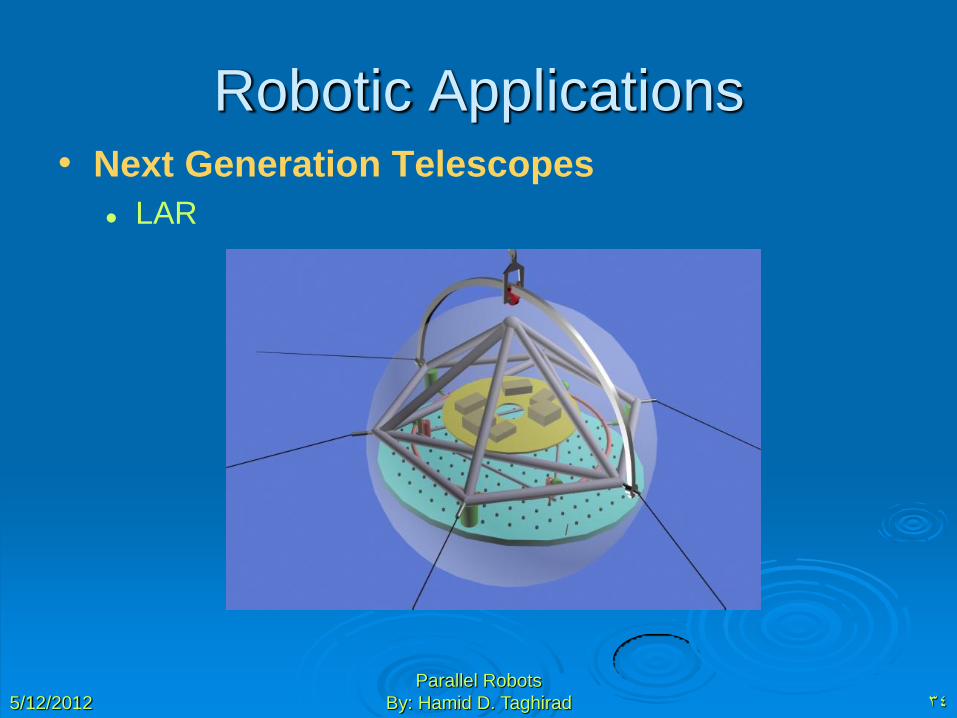
Robotic Applications • Next Generation Telescopes
LAR
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 34
Robotic Applications • Next Generation Telescopes
LAR
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 35
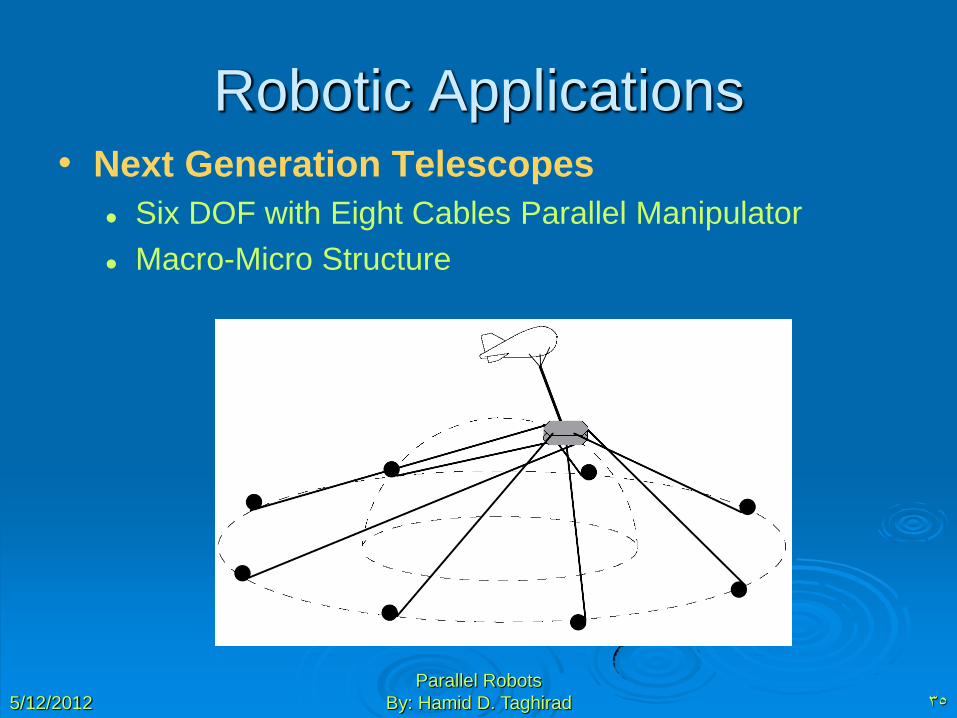
Robotic Applications • Next Generation Telescopes
Six DOF with Eight Cables Parallel Manipulator
Macro-Micro Structure
Parallel Robots
By: Hamid D. Taghirad
Three Generations
5/12/2012 36
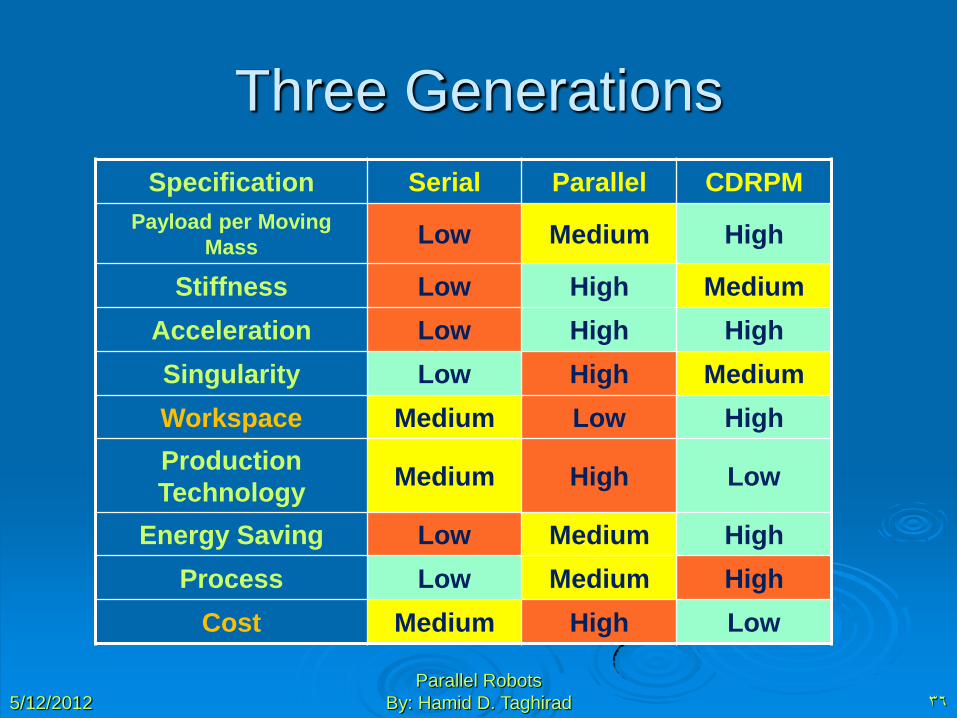
Specification Serial Parallel CDRPM
Payload per Moving
Mass Low Medium High
Stiffness Low High Medium
Acceleration Low High High
Singularity Low High Medium
Workspace Medium Low High
Production
Technology Medium High Low
Energy Saving Low Medium High
Process Low Medium High
Cost Medium High Low
Parallel Robots
By: Hamid D. Taghirad 37
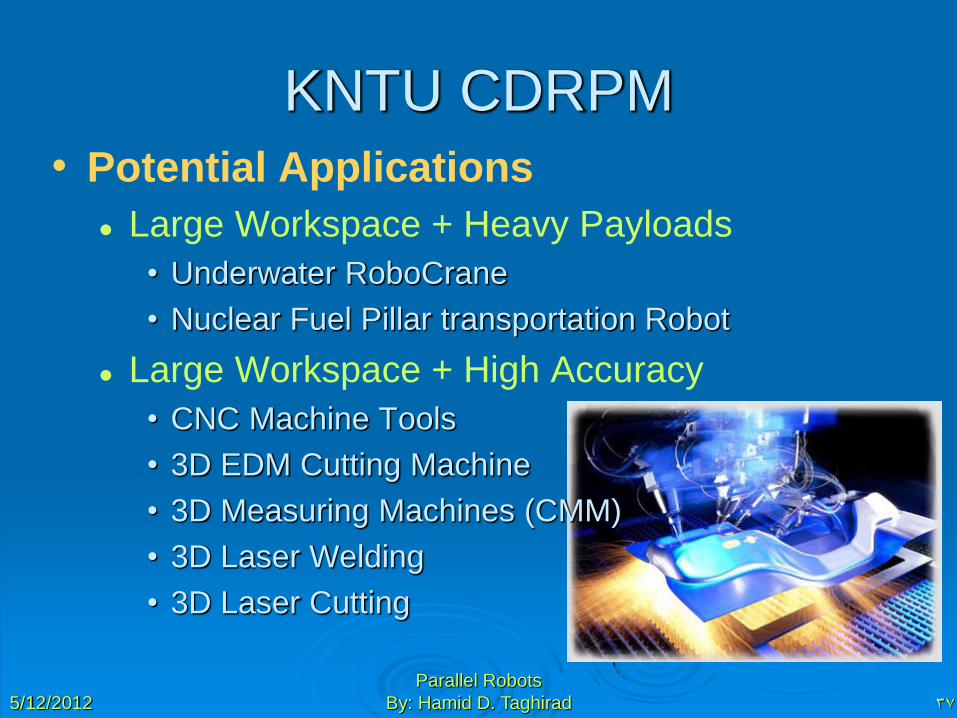
KNTU CDRPM
• Potential Applications
Large Workspace + Heavy Payloads
• Underwater RoboCrane
• Nuclear Fuel Pillar transportation Robot
Large Workspace + High Accuracy
• CNC Machine Tools
• 3D EDM Cutting Machine
• 3D Measuring Machines (CMM)
• 3D Laser Welding
• 3D Laser Cutting
5/12/2012
Parallel Robots
By: Hamid D. Taghirad 38
KNTU CDRPM
• Potential Applications
Laser Marking
Accuracy Speed
Parallel Robots
By: Hamid D. Taghirad 39
KNTU CDRPM
• Potential Applications
Laser Cutting (Accuracy)
5/12/2012
Parallel Robots
By: Hamid D. Taghirad 40
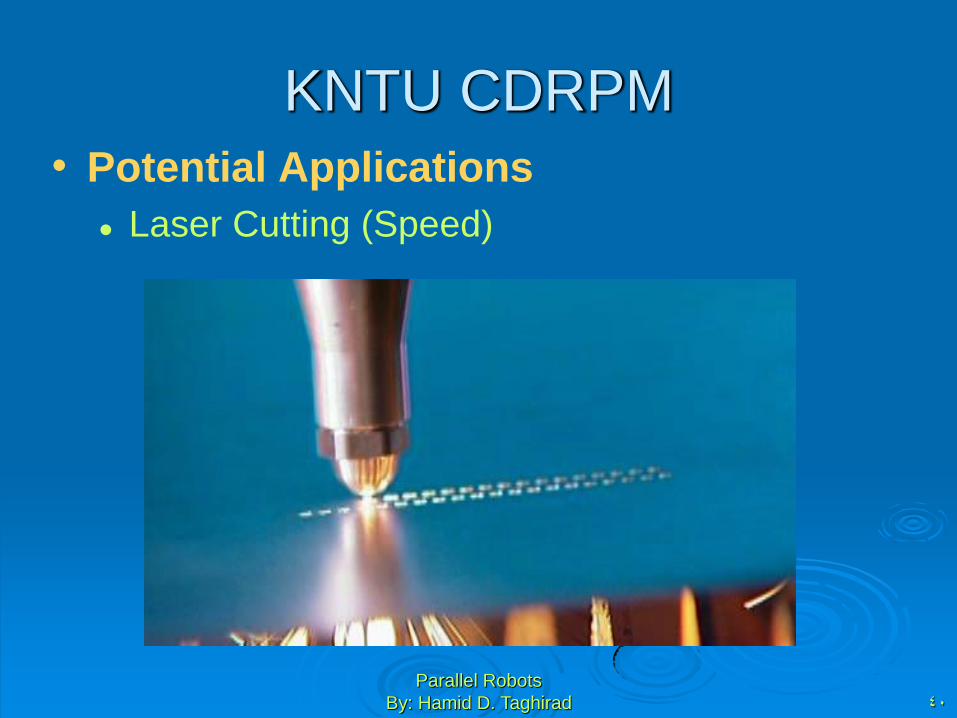
KNTU CDRPM
• Potential Applications
Laser Cutting (Speed)
Parallel Robots
By: Hamid D. Taghirad 41
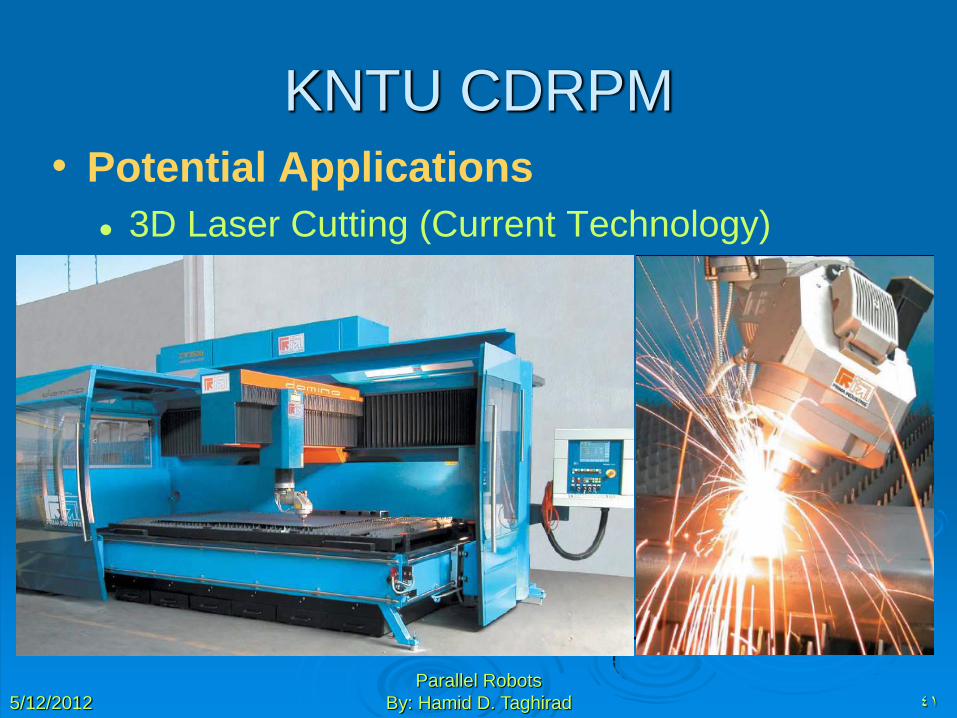
KNTU CDRPM
• Potential Applications
3D Laser Cutting (Current Technology)
5/12/2012
Parallel Robots
By: Hamid D. Taghirad 42
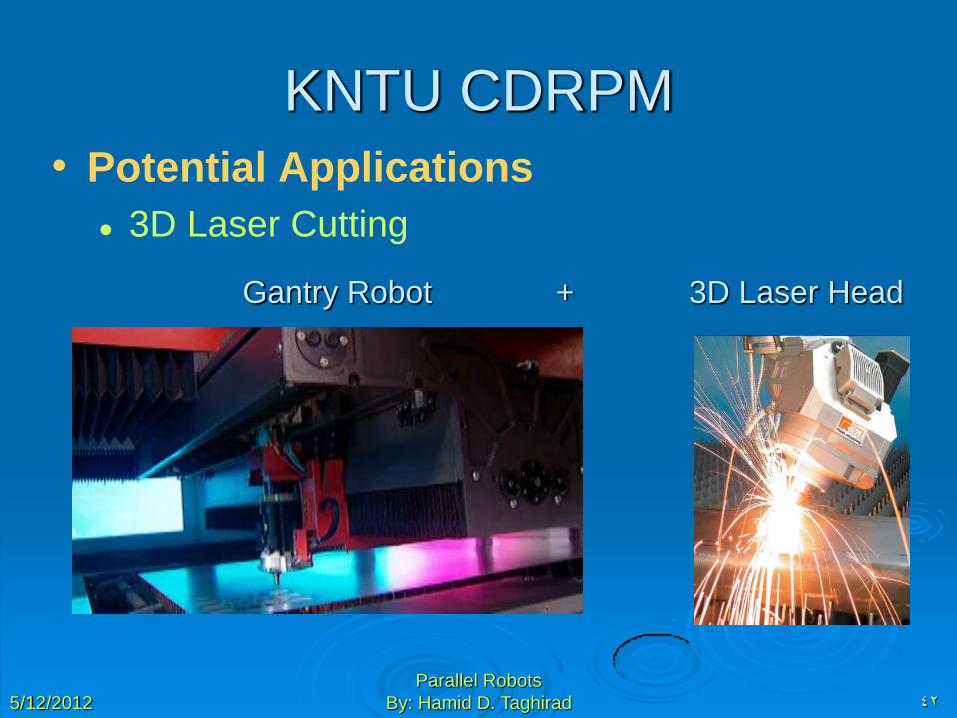
KNTU CDRPM
• Potential Applications
3D Laser Cutting
Gantry Robot + 3D Laser Head
5/12/2012
Parallel Robots
By: Hamid D. Taghirad 43
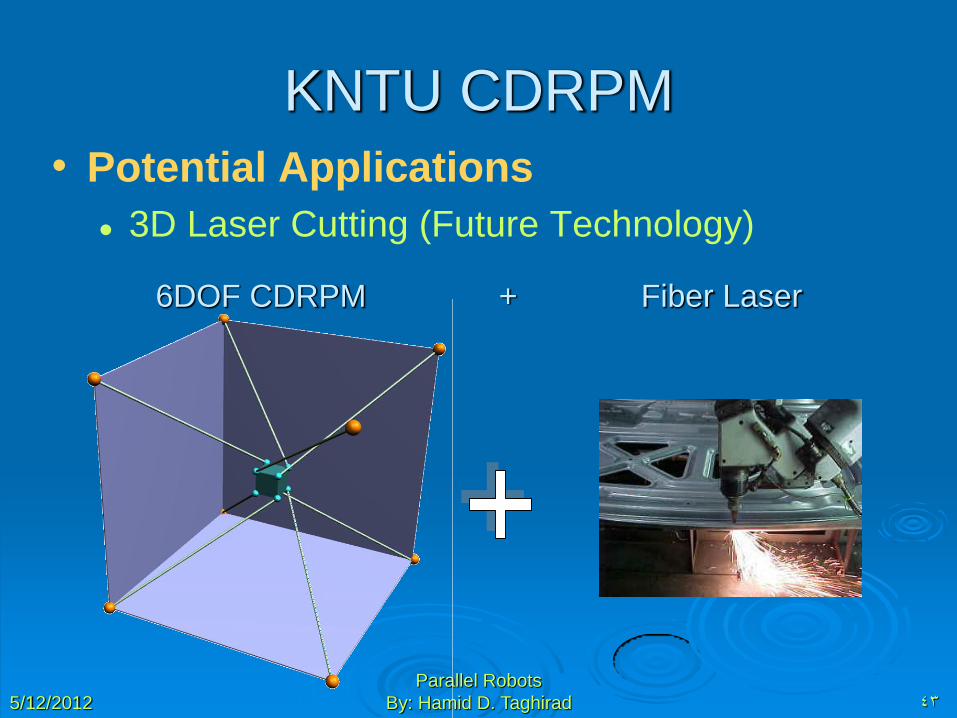
KNTU CDRPM
• Potential Applications
3D Laser Cutting (Future Technology)
6DOF CDRPM + Fiber Laser
5/12/2012
Parallel Robots
By: Hamid D. Taghirad 44
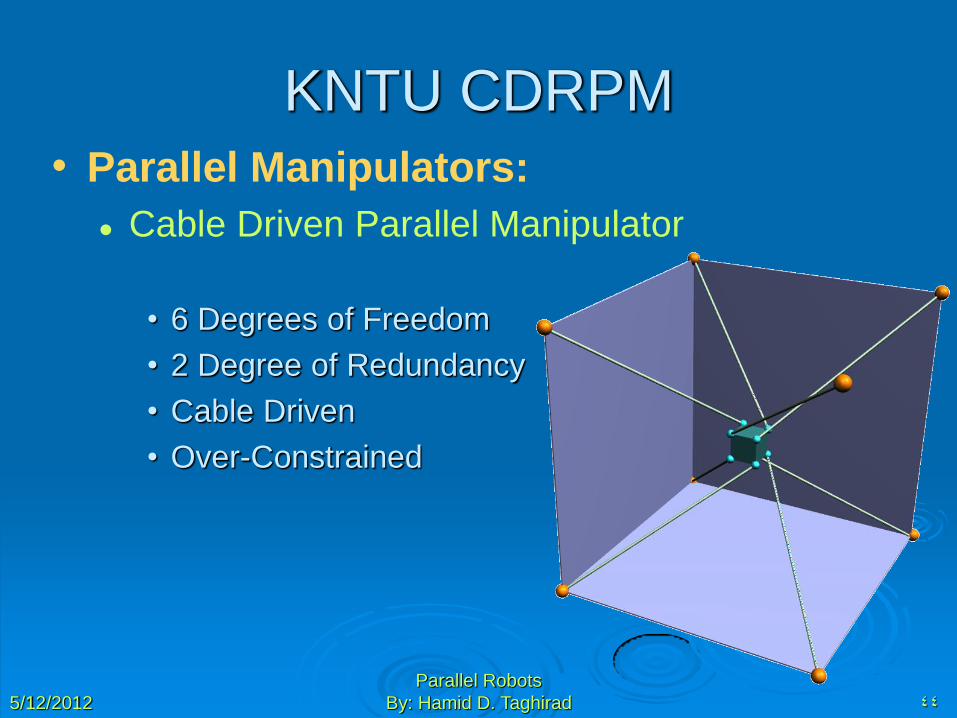
KNTU CDRPM
• Parallel Manipulators:
Cable Driven Parallel Manipulator
• 6 Degrees of Freedom
• 2 Degree of Redundancy
• Cable Driven
• Over-Constrained
5/12/2012
Parallel Robots
By: Hamid D. Taghirad 45
KNTU CDRPM
5/12/2012

Parallel Robots
By: Hamid D. Taghirad 5/12/2012 46
KNTU CDRPM
• Current Research
Design and Implementation
• Kinematic Analysis and Singularity Avoidance
• Optimal Kinematic Structure
• Dynamic Modeling and Simulations
• Optimal Redundancy Resolution
• Controller Design and Implementation
• Elasticity in Cables
Many B.Sc., M.Sc. And Ph.D. Theses!
• Welcome to Join us!
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 47
Parallel Robots: Course Content
• Introduction:
Robot classification
Kinematic chains
Kutzbach-Grubler criterion
Description of position and orientation
• Rotation matrix
• Screw-axis representation
• Euler angle representations
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 48
Parallel Robots: Course Content
• Kinematics analysis of parallel manipulators
Vector loop equations
4RPR manipulator
Hydraulic shoulder manipulator
Stewart Gough manipulator
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 49
Parallel Robots: Course Content
• Jacobian:
Angular and linear velocity
Jacobian matrices
Singularity conditions
Conventional Jacobians
• 3RRR manipulator,
• Spatial orientation manipulator
• Stewart Gough manipulator
Screw-based Jacobians
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 50
Parallel Robots: Course Content
• Stiffness Analysis:
Force-moment relations
Principle of virtual work • 4RPR manipulator
• Hydraulic shoulder manipulator
• Stewart Gough manipulator
Stiffness analysis of parallel manipulators
• Stiffness analysis of Stewart-Gough platform
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 51
Parallel Robots: Course Content
• Dynamics:
Dynamics analysis of parallel manipulators
Newton-Euler formulation • 4RPR manipulator
• Stewart Gough manipulator
Principle of virtual work,
Lagrange formulation,
General dynamic equations
• Properties of dynamics equations
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 52
Parallel Robots: Course Content
• Control:
Introduction to Lyapunov based control of
parallel manipulators
Position control topologies
• Linear and feed forward control
• Inverse dynamics control
• Robust inverse dynamics control
• Adaptive control 4RPR manipulator
Stewart Gough manipulator
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 53
Parallel Robots: Course Content
• Motion Control:
Introduction to Lyapunov based control of
parallel manipulators
Control topologies
Linear and feed forward control
Inverse dynamics control
Robust inverse dynamics control
Adaptive control
• 4RPR manipulator
• Stewart Gough manipulator
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 54
Parallel Robots: Course Content
• Force Control:
Control topologies
• Stiffness control
4RPR manipulator
Stewart Gough manipulator
• Direct force control
4RPR manipulator
Stewart Gough manipulator
• Impedance control
4RPR manipulator
Stewart Gough manipulator
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 55
Parallel Robots: Course Content
• Textbooks and References:
Hamid D. Taghirad, “Parallel Robots: Mechanics and Control”, CRC Press, to appear 2012.
Lung-Wen Tsai, “Robot analysis: the mechanics of serial and parallel manipulators”, New York, Wiley, 1999. (Available for Copy)
J.P. Merlet, “Parallel robots”, Boston, MA: Kluwer Academic Publishers, 2000. (Ebook Available)
L. Sciavicco, B. Siciliano, “Modelling and Control of Robot Manipulators” , Springer Verlag 3nd ed. 2007. (Ebook Available)
Selected papers.
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 56
Parallel Robots: Course Content • Marking Scheme:
Assignments: 30%
• 5 assignments
Kinematics and stiffness analysis
Dynamics analysis
Control
Mid-term Exam: 40% Kinematics and dynamics
Individual Design Project 30% Continuous Research and development
Parallel Robots
By: Hamid D. Taghirad 5/12/2012 57
Related Documents






![Robotics OPEN ACCESS robotics - University of Ottawa · In [52], a type-2 fuzzy controller was developed and tested on a parallel robot. Most recently, in [53], a type-2 TSK fuzzy](https://static.cupdf.com/doc/110x72/5f10545e7e708231d4489299/robotics-open-access-robotics-university-of-ottawa-in-52-a-type-2-fuzzy-controller.jpg)




