LEIC/2004 Eugénio Oliveira Robótica Inteligente Robótica Inteligente Docentes: Prof. Eugénio Oliveira parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web: http://www.fe.up.pt/~eol/20032004/robotica/ Quadros powerpoint em pdf sobre alguns capítulos Ligação para sítio sobre Robótica móvel LEIC/2004 Eugénio Oliveira Robótica Inteligente Robótica Inteligente BIBLIOGRAFIA: • Quadros tópicos disponibilizados no sítio web pelos docentes 1. Russel and Norvig, Artificial Intelligence: a Modern Approach, Prentice-Hall, 1995 2. Jones, Flynn and Seiger,A.K. Mobile Robots: Inspiration to Implementation, Peters, 1999 3. Allen,J. Hendler,J. and Tate,A. (eds.) Readings in Planning, Morgan Kaufmann, 1990 4. Elen Rich and Kevin Knight, Artificial Intelligence, 2ª Edição, McGraw-Hil, 1991 5. RoboCup Series, LNAI. Springer (1998, 1999, 2000, 2001 e 2002)

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
LEIC/2004 Eugénio Oliveira
Robótica InteligenteRobótica Inteligente
Docentes:
Prof. Eugénio Oliveira parte da teoria
Engº Luis Paulo Reisparte da teoria + aulas práticas
Sítio Web:http://www.fe.up.pt/~eol/20032004/robotica/
Quadros powerpoint em pdf sobre alguns capítulos
Ligação para sítio sobre Robótica móvel
LEIC/2004 Eugénio Oliveira
Robótica InteligenteRobótica InteligenteBIBLIOGRAFIA:
• Quadros tópicos disponibilizados no sítio web pelos docentes
1. Russel and Norvig,Artificial Intelligence: a Modern Approach, Prentice-Hall, 1995
2. Jones, Flynn and Seiger,A.K.Mobile Robots: Inspiration to Implementation, Peters, 1999
3. Allen,J. Hendler,J. and Tate,A. (eds.) Readings in Planning, Morgan Kaufmann, 1990
4. Elen Rich and Kevin Knight, Artificial Intelligence, 2ª Edição, McGraw-Hil, 1991
5. RoboCup Series, LNAI. Springer (1998, 1999, 2000, 2001 e 2002)

2
LEIC/2004 Eugénio Oliveira
Robótica InteligenteRobótica Inteligente
Avaliação:
50% Exame
50% Trabalho:
15% Relatório IntercalarData: ? Semana
50% Desenvolvimento e Apresentação do Trabalho25% Relatório final
Data: Última Semana10% Aulas
LEIC/2004 Eugénio Oliveira
Robótica InteligenteRobô:Noção derivada de 2 linhas de pensamento:
HumanoidesAutómatos
Robot deriva da palavra checa “robota”: trabalho forçado
Palavra usada pelo escritor checo Karel Capek
Definição genérica possível:Robô é um Agente físico capaz de establecer uma conecçãoInteligente entre Percepção e Acção

3
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Manipulador
Com Pernas
Com Rodas reconfigurável
Humanoide Com lagartas
LEIC/2004 Eugénio Oliveira
Robótica InteligenteOutros Robôs:
Robôs de Holiwood“Star Wars”

4
LEIC/2004 Eugénio Oliveira
Robótica InteligenteRobótica InteligenteRobótica como cruzamento de saberes:
Mecânica: Manipuladores, Junções e Graus de LiberdadeLocomoção (rodas, lagartas, multi-pernas, hélices…)
Teoria do controlo: Estática e DinâmicaGestão da Produção: Flexibilidade, IntegraçãoProgramação: Que Linguagens (Nível, comandos…)
Sensores: Distância, proximidade, toque, luz, som, visão.Fusão sensorial
Inteligência Artificial: Arquitecturas, Interpretação,Decisão e Planeamento, “Emoção
Sociologia: Impacto da Robótica, Prodútica, Domótica…
LEIC/2004 Eugénio Oliveira
Robótica InteligenteEstudos percursores da robótica Inteligente
• Cibernética(teoria do controlo, C. InformaçãoBiónica)
• Inteligência Artificial
• Robótica

5
LEIC/2004 Eugénio Oliveira
Robótica InteligenteMachine Speculatrix (Tartaruga) de Grey Walter 1953
• Sensores: Fotocélulas, Contacto• Actuadores Motores actuando na roda• Comportamentos:procurar/evitar luz; Vira e empurra; Recarrega bateria
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Como Sentir e Perceber Como ControlarComo gerar Acções

6
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Arquitectura típica de Robô Móvel
LEIC/2004 Eugénio Oliveira
Robótica InteligenteSeguir paredes e obedecer a comandos do Utilizador:Operador: stop, go,...Sonares para seguir paredes e evitar obstáculos
Processamento “paralelo”mas em processador único
Comandos do Utilizador

7
LEIC/2004 Eugénio Oliveira
Robótica InteligentePseudo-paralelismo funcional em processador único:
LEIC/2004 Eugénio Oliveira
Robótica InteligenteVeículos de Braitenberg, 1984
• Princípios da Psicologia• Influências excitatórias e inibitórias da acção•Ligação directa aos motores
•Comportamentos semelhantes a : medo, agressão, “amor”…

8
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Mundo é o melhor dos modelos possíveis.Não tente criar um outro Modelo do Mundo
LEIC/2004 Eugénio Oliveira
Robótica InteligenteRobôs para o espaço
Sojourner: parte doenviado a Marte em 1997

9
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Onde: Ambientes hostis Ambientes pouco estruturados Ambientes imprevistos e complexos
Domínios de aplicação:Oficinas: transporte e montagem de peçasHospitais e outros serviçosIndustria do EntretenimentoExploração espacial e submarinaVigilância, LimpezaGuerra….
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Funções importantes:
Sentir: Sensores mais complexosInterpretar: Fusão sensorialDecisão: Planeamento e monitoraçãoComunicação: Linguagens nível tarefa
Interfaces com utilizadoresCoordenação: Colaboração
Competição
Novas arquitecturas: Distribuídas e CooperativasReactivas

10
LEIC/2004 Eugénio Oliveira
Robótica InteligenteRobótica Inteligente
Funcionalidades da Robótica Inteligente
Percepção
Navegação
Planeamento
DecisãoAcção
Interpretação
Coordenação
LEIC/2004 Eugénio Oliveira
Robótica InteligenteRobótica Inteligente
Organizar as funcionalidades
Arquitecturas de controlo
Algoritmos
Suporte
Capacidades
Interpretação da
Visão
Planeamentoda
Acção
Controlo da
Navegação

11
LEIC/2004 Eugénio Oliveira
Robótica InteligentePrograma:
1- Introdução
Apresentação da disciplinaEnquadramento da Robótica Inteligente
2- Manipulação e NavegaçãoLinguagens de ManipuladoresArquitecturas de Controlo de Robôs Móveis
C.Deliberativo, Reactivo, HíbridoRepresentação do ConhecimentoNavegação em Robôs Móveis
Decomposição celularEsqueletizaçãoambientes desconhecidos e D*
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
3- Plataformas e simuladores robóticosCiber-Rato, Soccer-Server, “cão robô”
4- Percepção e Interpretação sensorialSensoresAlgoritmos de tratamento sensorialProcessamento e Análise de Imagem
5- Acção, Locomoção e ControloSistemas de LocomoçãoAlgoritmo de Controlo

12
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
6- Planeamento em RobóticaAnálise Meios-FinsPlaneadores e planeamento LinearPlaneamento Não-Linear e HierárquicoPlaneamento com Restrições GeométricasGeneralização de Planos
7- Robótica CooperativaCoordenação e CooperaçãoFutebol Robótico Simulado
8- Apoio aos Trabalhos práticos
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Progressos espetaculares no hardware para robôs
Problema actual: Software inteligente e eficiente
Communications of ACM special issue em “Robots: Intelligence, Versatility and Adaptivity”, Março 2002:

13
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Robô:AutónomoMóvel
Ambiente:DinâmicoNão estruturadoParcialmente observávelIncerto
Equipas de Robôs
LEIC/2004 Eugénio Oliveira
Robótica InteligenteEstudamos: Arquitecturas de Controlo
Robôs baseados em ComportamentosRepresentação (espacial)PercepçãoPlaneamentoNavegaçãoEquipas de robôs...
Não estudamos: Cinemática e DinâmicaTele-operaçãoTeoria do Controlo Clássica...
Pressupostos: Questões relacionadas com a Ciência da Computação e IA...

14
LEIC/2004 Eugénio Oliveira
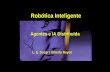
Robótica InteligenteInvestigação a aumentar nos últimos anos em robótica:
Pesquisa na BD INSPEC(índice de citações em física, electrónica, computação)
Anos de 1980-2001
Nº
de A
rtig
os in
dexa
dos
LEIC/2004 Eugénio Oliveira
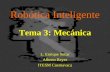
Robótica InteligenteInvestigação a aumentar nos últimos anos em equipas de robôs:
Pesquisa na BD INSPEC(índice de citações em física, electrónica, computação)
Anos de 1980-200Pesquisa nos termos: multi-robot, cooerative robot, distributed robotics
Razões do aumento:Mais domínios de aplicaçãoRoboCupMaior capacidade computacionalAvanços em Agentes autónomosAvanços em Sw coordenação

15
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Robótica e Prodútica
Fabricação Flexível
Gestão Integrada da Produção
Sistema Produtivo + Sistema tecnológico de Informação
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Exemplo de utilização doparadigma CIM na empresaTexas Instruments

16
LEIC/2004 Eugénio Oliveira
Robótica Inteligente
Diferenças Organizacionais entre o Japão e os USA
Related Documents