Robótica Integrada a la Manufactura Presenta: Samuel Murcia

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Robótica Integrada a la Manufactura Presenta: Samuel Murcia


Un robot no existe aislado en un proceso productivo
Se requiere de elementos periféricos
Pasivos: mesas, alimentadores, utillajes
Activos: Manipuladores secuenciales, CNC’s
Definir y seleccionar: Arquitectura del control (hardware y software)

Lay-out: plano de implantación del sistema. KUKA Sim Pro

Autodesk Factory Design http://www.autodesk.com/suites/factory-design-
suite/overview Siemens Tecnomatix
http://www.plm.automation.siemens.com/es_es/products/tecnomatix/index.shtml
Tecnomatix-RobotExpert http://www.plm.automation.siemens.com/en_us/
products/tecnomatix/manufacturing-simulation/robotics/robotexpert.shtml

CIROS® Mechatronics http://www.festo-didactic.com/mx-es/learning-
systems/software-e-learning/ciros-automation-suite/ciros-mechatronics.htm?fbid=bXguZXMuNTY0LjE0LjE4LjExMTAuNjY5Mw
CIROS® Advanced Mechatronics http://www.festo-didactic.com/mx-es/learning-
systems/software-e-learning/ciros-automation-suite/ciros-advanced-mechatronics.htm?fbid=bXguZXMuNTY0LjE0LjE4LjExMTAuNzc5NA

Simulación de pulido de un aspa
Permite probar distintas configuraciones del diseño de la planta (proceso iterativo).
Evaluación de alternativas de robot a utilizar y disposición física de todo el sistema.
Un simulador de FMS permite:
Dimensionar adecuadamente la célula
▪ Productividad
▪ Rendimiento
▪ Comportamiento ante cambios de demanda o imprevistos
Ensayo de estrategias de control para optimización

Configuraciones comunes:
Robot al centro de la célula

Robots en línea

Robot Móvil

Robot suspendido
Premisas: flexibilidad y automatización Control Individual: para cada elemento de la celda
Sincronización: entre dispositivos
Detección, tratamiento y recuperación: ante situaciones anómalas
Optimización del funcionamiento: de todos los componentes para evitar paradas por espera o acciones innecesarias
Interfaz con el usuario: Mostrar la información del estado, y modos de mantenimiento y ajuste
Interfaz con otras células: Para sincronizar optimizando el FMS compuesto de varias celdas
Interfaz con un sistema de control superior: Funciones SCADA supervisión y actualización de programas ante un cambio en la producción.
• Si la celda tiene relativa simplicidad: Es posible utilizar controlador del robot con sus E/S Analógicas y digitales
• Si la celda es compleja: estructura jerarquizada con PC o PLC como elemento central. Con comunicaciones de bus Ethernet, Profibus, etc.

Características Geométricas:
Área de trabajo. • Volumen espacial al que puede
llegar el extremo del robot. • Está determinado por tamaño,
forma y tipo de eslabones también por limitaciones del sistema de control.
• No debe usarse el efector para obtener el espacio de trabajo
• Tener en cuenta puntos singulares y posibles colisiones.
Grados de libertad: determinan accesibilidad y capacidad para orientar la herramienta, es determinado por la aplicación (a más GDL mayor coste).
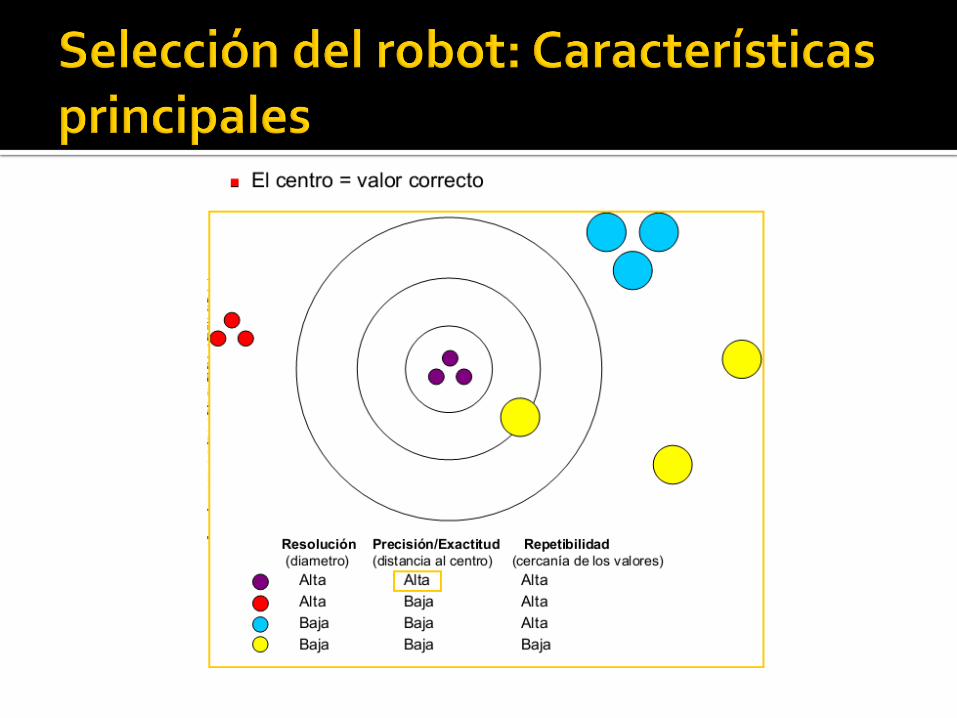
Resolución: Mínimo incremento que puede aceptar la unidad de control del robot, es limitado por resolución de captadores de posición y convertidores A/D y D/A (número de bits) entre otros.
Precisión: Distancia entre el punto programado y el valor medio de los puntos realmente alcanzados al repetir el movimiento varias veces con carga y temperatura nominales
Repetibilidad: Radio de la esfera que abarca los puntos alcanzados por el robot tras suficientes movimientos, al ordenarle ir desde el mismo origen al mismo punto de destino programado con condiciones de velocidad, carga, temperatura, etc. Iguales.
Error de repetibilidad: es debido a problemas en el sistema mecánico de transmisión como rozamiento, histéresis, zonas muertas.

Características dinámicas
Velocidad: Velocidad inversamente relacionada a carga, puede darse por la velocidad de cada articulación o por velocidad media del extremo, valores habituales entre 1 y 4 m/s a carga máxima.
Capacidad de carga: relacionada con tamaño, configuración y sistema de accionamiento, en la hoja de características el dato es «carga nominal» varía entre 5 a 100Kg en algunos casos media ton.

Sistema de Control: Su potencia determina las posibilidades cinemáticas y dinámicas, capacidades de programación (guiado, textual memoria de usuario) y capacidad de comunicación (E/S Digitales, E/S Analógicas, comunicación de datos RS-232, Ethernet, Profibus, etc.).
Tipo de control: Lazo abierto o lazo cerrado

El robot posee un mayor índice a un accidente que otra máquina con características similares
El robot no es muy aceptado socialmente Norma ISO 10218-1:2006 «Robots for
industrial environments- Safety Requirements- Part 1: Robot» [ISO -06] es una guía para garantizar la seguridad en los sistemas de fabricación automatizados con robots.
Causas de accidentes Colisión entre robots y hombre. Aplastamiento al ser atrapado el hombre entre el robot y
un elemento fijo. Proyección de una pieza o material (metal fundido,
corrosivo) transportada por el robot. Pueden deberse a:
Mal funcionamiento del sistema de control. Acceso indebido de personal a la zona de trabajo. Rotura de partes mecánicas por corrosión o fatiga Sobrecarga Herramientas peligrosas (láser corte por agua, etc.)
90% de accidentes ocurren en mantenimiento, ajuste y programación, 10% en funcionamiento normal.
Medidas de seguridad en fase de diseño:
Supervisión del sistema de control: supervisión de subsistemas.
Paradas de emergencia: Desenergizar al robot.
Velocidad máxima limitada: Cuando una persona está cerca la velocidad será inferior a la nominal
Medidas de seguridad en fase de diseño: Detectores de sobreesfuerzo: detectores que harán
que los accionamientos se desactiven cuando sobrepase un valor excesivo (colisión o atrapar persona con parte fija).
Pulsador de seguridad: Consolas de programación contarán con dispositivo de seguridad (pulsador de hombre muerto) para impedir movimiento accidental.
Códigos de acceso: Llaves y códigos de seguridad para unidad de control, arranque y paro y modificación de programa.

Medidas de seguridad en fase de diseño:
Frenos mecánicos adicionales: cuando se manejan grandes cargas y se corta la alimentación de los accionadores.
Comprobación de señales de autodiagnóstico: en la unidad de control previo a primer funcionamiento.
Barreras de acceso a la célula: impiden el acceso a personas (paro al entrar en zona de trabajo).
Medidas de seguridad en fase de diseño: Dispositivos de intercambio de piezas: Cuando el
operador deba poner o recoger piezas del área de trabajo se usarán dispositivos que permitan realizar estas operaciones a distancia ej. Bandas transportadoras, mesas giratorias
Movimientos condicionados: se programa al robot para que cuando el operario entre a su zona no efectúe movimiento alguno.
Zonas de reparación: fuera de la zona de trabajo del robot, pero dentro de su campo de alcance con dispositivos se asegura que no realizará movimientos automáticos

Abstenerse de entrar en la zona de trabajo: En la programación e implantación permanecer fuera del campo de acción del robot.
Señalización adecuada: Señalización del estado del robot o línea robotizada con señales luminosas y acústicas, señales luminosas para advertir del riesgo de accidente.
Prueba progresiva del programa del robot: Ejecución del programa con sumo cuidado a velocidad lenta y paso a paso después continuo e incrementar luego la velocidad.
Formación adecuada: para el personal.
Antes de llevar a cabo un proyecto de ingeniería se debe realizar un análisis económico del mismo, su viabilidad y rentabilidad.
El objetivo de cualquier empresa es el rendimiento económico a corto o largo plazo
Tipo de instalación:
Instalación de carácter novedoso: se tienen varias alternativas incluida la del sistema robotizado, se elige la más beneficiosa.
Automatización que incluye un robot de una operación manual: Comparación de tiempos de operación manual y robotizada junto con costes y beneficios
Datos básicos del coste Costes de inversión: para implantar el sistema
▪ Adquisición del robot
▪ Herramientas y equipos especiales
▪ Coste de ingeniería e instalación
Costes y beneficios de explotación: ▪ Mano de obra
▪ Mantenimiento
▪ Aumento de calidad e incremento de productividad
▪ Entrenamiento
Métodos de análisis económicos Período de recuperación: Indica cuándo se
empieza a tener ingresos positivos sumando todas las entradas y salidas de capital desde el comienzo del proyecto
Método del Valor Actual Neto (VAN): Considera el valor del dinero en el tiempo
Método de la tasa Interna de la Renta (TIR): Similar al VAN, determina la tasa de rendimiento que se obtendrá del proyecto
Related Documents











