882 JOURNAL OF NEUROTRAUMA Volume 23, Number 6, 2006 © Mary Ann Liebert, Inc. Pp. 882–896 Robotic Gait Analysis of Bipedal Treadmill Stepping by Spinal Contused Rats: Characterization of Intrinsic Recovery and Comparison with BBB JEFF A. NESSLER, 1 RAY D. DE LEON, 2 KELLI SHARP, 3 EUGENE KWAK, 1 KOYIRO MINAKATA, 1 and DAVID J. REINKENSMEYER 1,4 ABSTRACT There is a critical need to develop objective, quantitative techniques to assess motor function after spinal cord injury. Here, we assess the ability of a recently developed robotic device (the “rat step- per”) to characterize locomotor impairment following contusion injury in rats. In particular, we an- alyzed how the kinematic features of hindlimb movement during bipedal, weight-supported tread- mill stepping change following contusion, and whether these changes correlate with the recovery of open field locomotion. Female, Sprague-Dawley rats (n 29, 8 weeks of age) received mid thoracic contusion injuries of differing severities (11 mild, nine moderate, nine severe, and four sham). In a first experiment, 16 of the animals were evaluated weekly for 12 weeks using the robotic stepping device. In a second experiment, 17 of the animals were evaluated every other day for 4 weeks. The contused animals recovered open field locomotion based on the Basso, Beattie, and Bresnahan Scale (BBB) analysis, with most of the recovery occurring by 4 weeks post-injury. Analysis of 14 robotic measures of stepping revealed that several measures improved significantly during the same 4 weeks: swing velocity, step height, step length, hindlimb coordination, and the ability to support body weight. These measures were also significantly correlated with the BBB score. The number of steps taken during testing was not directly related to intrinsic recovery or correlated to the BBB score. These results suggest that it is the quality of weight-supported steps, rather than the quantity, that best reflects locomotor recovery after contusion injury, and that the quality of these steps is determined by the integrity of extensor, flexor, and bilateral coordination pathways. Thus, by measuring only a few weight-supported steps with motion capture, a sensitive, valid measure of locomotor recovery following contusion injury can be obtained across a broad range of impairment levels. Key words: BBB; gait analysis; locomotion; motor control; robotics; spinal cord injury 1 Department of Mechanical & Aerospace Engineering, University of California, Irvine, California. 2 Department of Kinesiology and Nutritional Science, California State University, Los Angeles, California. 3 Reeve-Irvine Research Center, University of California, Irvine, California. 4 Department of Biomedical Engineering, University of California, Irvine, California. Two of the authors of this paper (R.D. DeLeon and D.J. Reinkensmeyer) declare a financial interest in the company that man- ufactured the rat stepper used in this study.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
882
JOURNAL OF NEUROTRAUMAVolume 23, Number 6, 2006© Mary Ann Liebert, Inc.Pp. 882–896
Robotic Gait Analysis of Bipedal Treadmill Stepping by Spinal Contused Rats: Characterization of Intrinsic
Recovery and Comparison with BBB
JEFF A. NESSLER,1 RAY D. DE LEON,2 KELLI SHARP,3 EUGENE KWAK,1KOYIRO MINAKATA,1 and DAVID J. REINKENSMEYER1,4
ABSTRACT
There is a critical need to develop objective, quantitative techniques to assess motor function afterspinal cord injury. Here, we assess the ability of a recently developed robotic device (the “rat step-per”) to characterize locomotor impairment following contusion injury in rats. In particular, we an-alyzed how the kinematic features of hindlimb movement during bipedal, weight-supported tread-mill stepping change following contusion, and whether these changes correlate with the recovery ofopen field locomotion. Female, Sprague-Dawley rats (n � 29, 8 weeks of age) received mid thoraciccontusion injuries of differing severities (11 mild, nine moderate, nine severe, and four sham). In afirst experiment, 16 of the animals were evaluated weekly for 12 weeks using the robotic steppingdevice. In a second experiment, 17 of the animals were evaluated every other day for 4 weeks. Thecontused animals recovered open field locomotion based on the Basso, Beattie, and Bresnahan Scale(BBB) analysis, with most of the recovery occurring by 4 weeks post-injury. Analysis of 14 roboticmeasures of stepping revealed that several measures improved significantly during the same 4 weeks:swing velocity, step height, step length, hindlimb coordination, and the ability to support body weight.These measures were also significantly correlated with the BBB score. The number of steps takenduring testing was not directly related to intrinsic recovery or correlated to the BBB score. Theseresults suggest that it is the quality of weight-supported steps, rather than the quantity, that bestreflects locomotor recovery after contusion injury, and that the quality of these steps is determinedby the integrity of extensor, flexor, and bilateral coordination pathways. Thus, by measuring onlya few weight-supported steps with motion capture, a sensitive, valid measure of locomotor recoveryfollowing contusion injury can be obtained across a broad range of impairment levels.
Key words: BBB; gait analysis; locomotion; motor control; robotics; spinal cord injury
1Department of Mechanical & Aerospace Engineering, University of California, Irvine, California.2Department of Kinesiology and Nutritional Science, California State University, Los Angeles, California.3Reeve-Irvine Research Center, University of California, Irvine, California.4Department of Biomedical Engineering, University of California, Irvine, California.Two of the authors of this paper (R.D. DeLeon and D.J. Reinkensmeyer) declare a financial interest in the company that man-
ufactured the rat stepper used in this study.
INTRODUCTION
AVARIETY OF TECHNIQUES have been developed to as-sess locomotor function in the spinal cord injured
rodent, with the objective of better detection and under-standing of changes associated with neural recovery andregeneration. Concerns remain, however, regarding thesensitivity, ease-of-use, and objectivity of these tech-niques, and few strategies are able to facilitate a satis-factory, mechanistic understanding of the neural circuitsand tracts that support locomotion (Keagi et al., 2001;Basso et al., 2004; Howard et al., 2000). Thus, althoughseveral current techniques have demonstrated some abil-ity to track recovery, there remains a general consensusregarding a need for improved or supplementary mea-sures, especially ones providing objective, quantifiabledata (Lankhorst et al., 1999; Metz et al., 2000; Muir andWebb, 2000).
Current approaches to locomotor assessment can begrouped broadly as task performance measures, compos-ite scores, or gait analyses. Techniques that measure taskperformance (e.g., time to climb a rope) yield objectiveresults that are sensitive to injury severity, but providelittle insight into the quality or mechanisms of the ani-mal’s performance. In addition, they are unable to eval-uate animals with functional deficits preventing themfrom performing the task (Muir and Webb, 2000). Tech-niques that assign a composite score are effective in as-
sessing overall recovery, but require a trained, careful ob-server. These techniques are at least somewhat subjec-tive and are non-linear, because they must weight differ-ent aspects of recovery in order to generate an overallrating of recovery. For example, the widely used Basso,Beattie, and Bresnahan Scale (BBB) (Basso et al., 1995,1996), which ranks open-field locomotor movementquality on an ordinal rating scale, counts more gross as-pects of motor control before more finely detailed ones.Composite scores typically provide only coarse resolu-tion for quantifying how specific movement control sys-tems (e.g., paw placement or limb extension) are im-paired. Gait analysis approaches, using motion capturesystems, force plates, and/or electromyography (EMG),have perhaps the greatest potential for objectivity, sensi-tivity, and increased insight into recovery mechanisms,but are often time consuming and sometimes requirecostly special equipment (Vrinten et al., 2003; Cheng etal., 1997; Howard et al., 2000). In addition, they are oflimited utility for animals that are too impaired to walk.
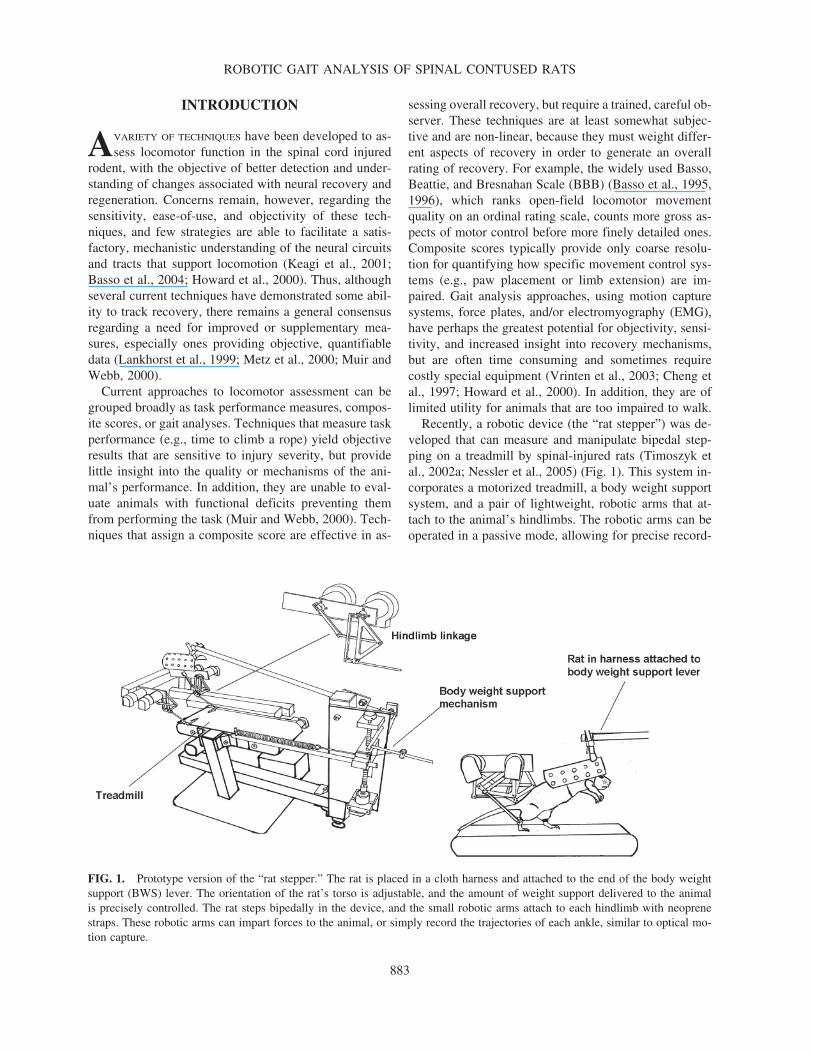
Recently, a robotic device (the “rat stepper”) was de-veloped that can measure and manipulate bipedal step-ping on a treadmill by spinal-injured rats (Timoszyk etal., 2002a; Nessler et al., 2005) (Fig. 1). This system in-corporates a motorized treadmill, a body weight supportsystem, and a pair of lightweight, robotic arms that at-tach to the animal’s hindlimbs. The robotic arms can beoperated in a passive mode, allowing for precise record-
ROBOTIC GAIT ANALYSIS OF SPINAL CONTUSED RATS
883
FIG. 1. Prototype version of the “rat stepper.” The rat is placed in a cloth harness and attached to the end of the body weightsupport (BWS) lever. The orientation of the rat’s torso is adjustable, and the amount of weight support delivered to the animalis precisely controlled. The rat steps bipedally in the device, and the small robotic arms attach to each hindlimb with neoprenestraps. These robotic arms can impart forces to the animal, or simply record the trajectories of each ankle, similar to optical mo-tion capture.

ing of hindlimb position with little effort from the in-vestigator, similar to optical motion capture systems withautomatic digitization. The rat stepper can also applyforces through the robot arms to the animal’s hind shanks,assisting or perturbing stepping for training or assessmentpurposes (Timoszyk et al., 2002b; Nessler et al., 2005).In addition, the device allows the rat’s body weight sup-port level to be altered as needed to assist impaired ani-mals to step on the treadmill. Thus, for animals with lit-tle locomotor function that may not be able to step whilesupporting their entire body weight, the device providesa means to assess partial weight bearing stepping.
To date, the rat stepper has been used primarily to studylocomotor training and recovery of spinal cord transectedrats (de Leon et al., 2002b; Timoszyk et al., 2002b;Nessler et al., 2003). For example, we recently found that as weight support was gradually and automaticallyramped down from weightlessness (100% support), thelevel at which the animals were unable to continue step-ping was a sensitive and reliable measure of recovery(Nessler et al., 2003).
For studies of locomotor recovery, however, it wouldbe optimal if the device could be used to analyze hindlimbfunction following contusion injuries, which can lead toa substantial degree of locomotor recovery depending oninjury severity. Contusion has become a frequently usedmodel of spinal cord injury (SCI) in rats because it per-haps best represents the most common mechanism of SCIin humans. Investigators have noted the difficulty in as-sessing the recovery of locomotor ability following con-tusion injury, reporting a weak relationship, if any, be-tween kinematic parameters of locomotion and functionalrecovery (Hamers et al., 2001). Detecting improvementsfollowing incomplete SCI may be problematic, due in partto a higher variability of motor impairment, even in ani-mals receiving injuries of a similar severity and location.
The purpose of this study was to investigate the abil-ity of the rat stepper to characterize locomotor impair-ment following spinal cord contusion injury in rats. Inparticular, we sought to determine how the kinematic fea-tures of hindlimb movement during bipedal, weight-sup-ported stepping on a treadmill change following con-tusion, and whether they correlate with open fieldlocomotion, as assessed by the BBB scale. In addition,we analyzed how graded levels of body weight supportaffect stepping ability in contused animals.
METHODS
Animals
In a first experiment, 16 female Sprague-Dawley ratswere used, 12 of which received a contusion injury to the
mid thoracic (T9) spinal cord at 8 weeks of age. All in-juries were delivered with the Infinite Horizon spinal cordinjury device (Precision Systems & Instrumentation, Lex-ington KY) (Scheff et al., 2003). The animals were ran-domly assigned into four groups, each with four animals,with group 1 receiving a severe injury (250 kdynes),group 2 receiving a moderate injury (200 kdynes), group3 receiving a mild injury (150 kdynes), and a sham groupthat underwent surgery to expose the spinal cord but re-ceived no injury.
A second experiment was then designed to replicatethe first, focusing on the first 4 weeks following injury.An additional 17 female, Sprague-Dawley rats receiveda similar contusion injury to the mid thoracic spinal cordat 8 weeks of age, and these animals were randomly as-signed into three groups. Group 1 received a severe in-jury (n � 5, 250 kdynes), group 2 received a moderateinjury (n � 5, 200 kdynes), and group 3 received a mildinjury (n � 7, 100–150 kdynes). The animals were han-dled extensively (30 min/week) and made familiar withthe rat stepper before injury, but following injury wereonly exposed to the device during testing sessions.
The use of animals in this study was approved by theInstitutional Animal Care and Use Committee (IACUC)at the University of California, Irvine.
Surgical Procedures and Animal Care
Animals were anaesthetized with a Ketamine/Xylazinemixture (90:10 mg/kg, i.p.). Body temperature was main-tained with a heating pad at 37 � 0.5°C. Surgeries wereperformed under aseptic conditions, and all procedureswere approved by the Institutional Animal Care and UseCommittee. The skin over the spine was shaved andcleaned with betadyne solution. The skin was incised andmuscle and connective tissue were bluntly dissected toexpose the T9–T11 vertebrae. A T9 laminectomy wascompleted, taking care not to damage the spinal cord. Theanimals then received a 250-, 200-, or 150-kdyne contu-sion with the Infinite Horizon Device. Upon delivery ofthe contusion injury, the connective tissue and musclewere closed with 5-0 chromic gut and the skin was closedusing staples. Carprofen (5 mg/kg) was given subcuta-neously, post-operatively. Following the surgery, ratswere immediately placed on a water-jacketed heating padat 37°C. Animals were kept in a cage with Alpha-Dri inaddition to regular bedding that was positioned on a heat-ing pad, and were monitored until they recovered fromanesthesia, whereby they were returned to their livingquarters. In addition to analgesics, animals were re-hy-drated with lactate ringers (5 mg/100 g, subcutaneously)immediately post-surgery, and were treated prophylacti-cally with Baytril (Enroflaxacin 2.5 mg/kg, subcuta-
NESSLER ET AL.
884

neously) for urinary tract infections (UTI) for 10–14 days.The animals were monitored twice daily throughout thepost-injury survival period for general health, coat qual-ity (indicative of grooming activity), and mobility withinthe cage. Bladders were manually expressed twice dailyfor 10–14 days by which time the bladder was no longerdistended and palpable, and the animal developed an au-tomatic bladder voidance reflex. Animals were monitoredfor UTI for the entire period of the experiment. Rats werealso monitored for any signs of debilitation or skin le-sions on the paralyzed limbs.
Rat Stepping Device
Locomotor evaluation was performed as the animalswalked bipedally on a motorized treadmill, while theirupper torso was held in a cloth harness (Fig. 1). Preciseamounts of body weight support (BWS) were deliveredto each animal through a specially designed, motorizedmechanism (Timoszyk et al., 2002a; Nessler et al., 2003;Nessler et al., 2005), which actuated a support lever armattached to the harness. The BWS system was designedto provide electronically adjustable weight support towithin two grams, while minimizing interference to nor-mal locomotion. The animals were required to walkbipedally to avoid a situation in which they might bear adisproportionate amount of weight with their forelimbsin order to compensate for hindlimb dysfunction.
Precise hindlimb trajectories (resolution ≈ 1 mm) weremeasured by attaching small, lightweight robotic arms toeach of the rat’s lower shanks. These linkages are forceprogrammable, two-joint robotic arms that provide lessthan 5-gF backdrive friction when operated in a passivemode (Timoszyk et al., 2002a; Nessler et al., 2005). Therobotic arms were fixed to the animal’s lower shank witha small neoprene strip that was wrapped around the limband held in place by a lightweight alligator clip attachedto the end of each linkage. The alligator clip was mountedon a small shaft and ball bearing to allow for rotationwithin the sagittal plane. The interlimb spacing was setto be a comfortable distance for each rat (approximately3–4.0 cm), and the robot arms and neoprene attachmentsallowed approximately 1 cm of limb movement outsideof the para-sagittal plane (i.e., internal and external rota-tion, abduction and adduction).
Evaluation of the first group of animals was performedon the first prototype of the “rat stepper” (Fig. 1), whereasthe second group of animals was evaluated using a later,commercialized version of the device (Rodent Robot3000, Robomedica Inc). While the two devices were sim-ilar in their mechanical design and function, there weretwo differences that might affect an impaired animal’sability to step. The first of these differences arises fromthe design of the hindlimb linkages. The commercial de-
vice uses materials that result in a linkage that is lighterand has less inertia than those used by the prototype de-vice. The commercial linkages also use Teflon lined plainbearings at each joint, while the prototype device usessmall, ball bearings at each joint. These features result ina small difference in friction between the linkage types(greater friction in the commercial linkages) and in iner-tia (greater inertia and mass in the prototype device). Thesecond difference between the devices relates to the bodyweight support mechanism and support arm. In the pro-totype device, the mechanism is located in front of thestepping animal, and in the commercial device it is lo-cated behind the stepping animal.
Both the commercial and prototype rat stepper pro-vided accurate body weight support while capturing thex (anterior-posterior) and y (superior-inferior) trajectoriesof each of the animal’s hindlimbs. Steps were identifiedand analyzed from the recorded x and y trajectories us-ing a special step-detection program written in MATLAB(the Mathworks, Inc.). This algorithm began by findingall of the local maxima (roughly toe-down) and minima(roughly toe-off) of the x trajectory data, and identifyingpossible step segments defined by a minimum-maximum-minimum sequence. Those segments that were of an ap-propriate duration and amplitude in both the x and y di-rections were recorded as steps, while the adjacent,non-step segments were combined up to an acceptablestep duration, to check for other, more irregular steps. Allsteps included in the final analysis conformed to a stan-dard range of lengths (10–75 mm), durations (0.3–2.0sec), and heights (3–40 mm). Timoszyk et al. (2002b)provide a more detailed description of the step detectionalgorithm used in these experiments.
The accuracy of the step detection program was eval-uated by comparing steps detected in software to stepsidentified by hand within the hindlimb stepping data ofa moderately injured animal. The number of waveformscorrectly classified as steps by the software was 451, andthe number of steps detected by hand was 485, yieldingan error of 7%.
The sensitivity of the kinematic analysis to the abovestep selection criteria was also investigated by repeatingthe analysis using parameters that were less permissive(i.e., only the best steps were included: length 20–60 mm,duration 0.5–1.5 sec, and height 3–30 mm). The overallresults of the kinematic analyses were similar for bothversions of the step detection algorithm, with the excep-tion of the number of steps recorded. Each of the robotmeasures that demonstrated recovery and were signifi-cantly correlated to the BBB score did not change as afunction of the different step-detection parameters. Thus,below, we only present the results from the more per-missive step detection algorithm.
ROBOTIC GAIT ANALYSIS OF SPINAL CONTUSED RATS
885

Testing Protocol
During each data collecting session, the animals weresubjected to a specific protocol involving two differentmodes of robot analysis. The first type of trial involveda BWS ramp-down procedure (Nessler et al., 2003) inwhich the rat began walking at 100% BWS (the animalwas held above the moving belt but was not bearing anyof its body weight), and BWS was slowly decreased at arate of 0.5% every second. At some point during the pro-cedure, the animal was no longer able to step (the “BWSfailure level”), presumably a function of its ability to sup-port weight. BWS would then be reset to 100%, the an-imal would be lifted and placed back into the proper pos-ture, and the procedure would begin again. For each robotsession, the animals performed three of these ramp tri-als. The second type of robot analysis consisted of twoadditional trials, each 30 sec in duration, with weight sup-port fixed at a predetermined percentage of the animal’sbody weight. Treadmill speed was set at approximately15 cm/sec for all trials.
The first set of animals was evaluated weekly for 3months, beginning 7 days after injury (12 robot sessionstotal). In addition to the three ramped BWS trials, the an-imals performed a fixed BWS trial at 75% and 50% oftheir body weight, each with the robot linkages attachedto their hindlimbs. For the second set of animals, datacollection began 3 days after injury and continued ap-proximately every 2 days for a total of 4 weeks (12 ro-bot sessions total). Each robot session included threeBWS ramp-down trials, one 30-sec trial with BWS fixedat 90% of the animal’s body weight, and one 30-sec trialwith BWS fixed at 75% of the animal’s body weight. Oc-casionally, animals developed sores on their feet as a re-sult of friction between the surface of the treadmill andtheir skin. In these instances, testing was discontinuedprematurely, and a topical medication was applied to theaffected area.
Rotary optical encoders (2048 cts./rev.) incorporatedinto the rat stepper were used to measure linkage posi-tion, BWS level, and BWS arm position. Raw trajectorydata was filtered prior to kinematic analysis (3rd order,low-pass, cutoff � 40 Hz), and velocities were calculatedas the difference between consecutive data points, nor-malized with respect to time (500 Hz). From these data,several measurements of locomotor performance werederived (Table 1), many of which have been used previ-ously to assess recovery of quadrapedal locomotion us-ing various techniques, including optical motion capturesystems, ground reaction forces, and the “CatWalk”(Cheng et al., 1997; Hamers et al., 2001; Howard et al.,2000). In addition to each of these kinematic variablesmeasured by the robot, the animals were evaluated on the
BBB scale by a single, trained observer before each ro-bot testing session, and all sessions were recorded byvideo.
Statistical Analysis
Data analysis began with a multivariate mixed modelanalysis of variance (MMM ANOVA) across all of the14 robot measures between weeks 1 and 4. A significantresult in this multivariate omnibus test determined thatsome combination of the 14 robot measures changed sig-nificantly across time. Single variable, mixed modelANOVAs (injury group by time) were used as follow-uptests to determine the individual robot measures thatchanged significantly with recovery, and which measureswere able to distinguish between levels of contusion in-jury. The repeated measures portion of the ANOVAs in-cluded the results from each of the 14 robot measuresfrom weeks 1 to 4 of data collection for both experiments.The mixed model ANOVAs from each of the experimentswere performed separately (12 animals for experiment 1and 17 animals for experiment 2) and then combined (29animals total) to determine the overall probability of de-tecting recovery for both experiments, as well as any dif-ferences between injury groups. Similarly, a secondmixed model ANOVA (experiment by time) was per-formed on the data from both experiments to determineif there was a difference in each measure between thetwo experiments (or robotic device used). Lastly, a mul-tivariate mixed model ANOVA was performed with thedata from the first experiment between weeks 5 and 12to determine if any of the robot measures or BBB scorechanged significantly after the first 4 weeks of recovery.
To control for the possibility of a Type I error, eachmixed model ANOVA was compared to an alpha levelof 0.0036, which reflects a Bonferoni correction from anoverall alpha level of 0.05, based on 14 robot measures.Multiple linear regression was used to identify the rela-tionship of the 14 robot measures and the BBB scoreacross days. The individual robot measures were also cor-related with the BBB scores by comparing the mean ro-bot value for each data collection session with the ani-mal’s BBB score for that day.
RESULTS
Kinematic Features of Hindlimb Movement aftera Contusion Injury
All of the contused animals exhibited deficits in loco-motor function immediately following injury. This wasdemonstrated in open field locomotion (e.g., Experiment1 mean BBB scores of 4.5 � 4.75, 9.00 � 4.38, and
NESSLER ET AL.
886

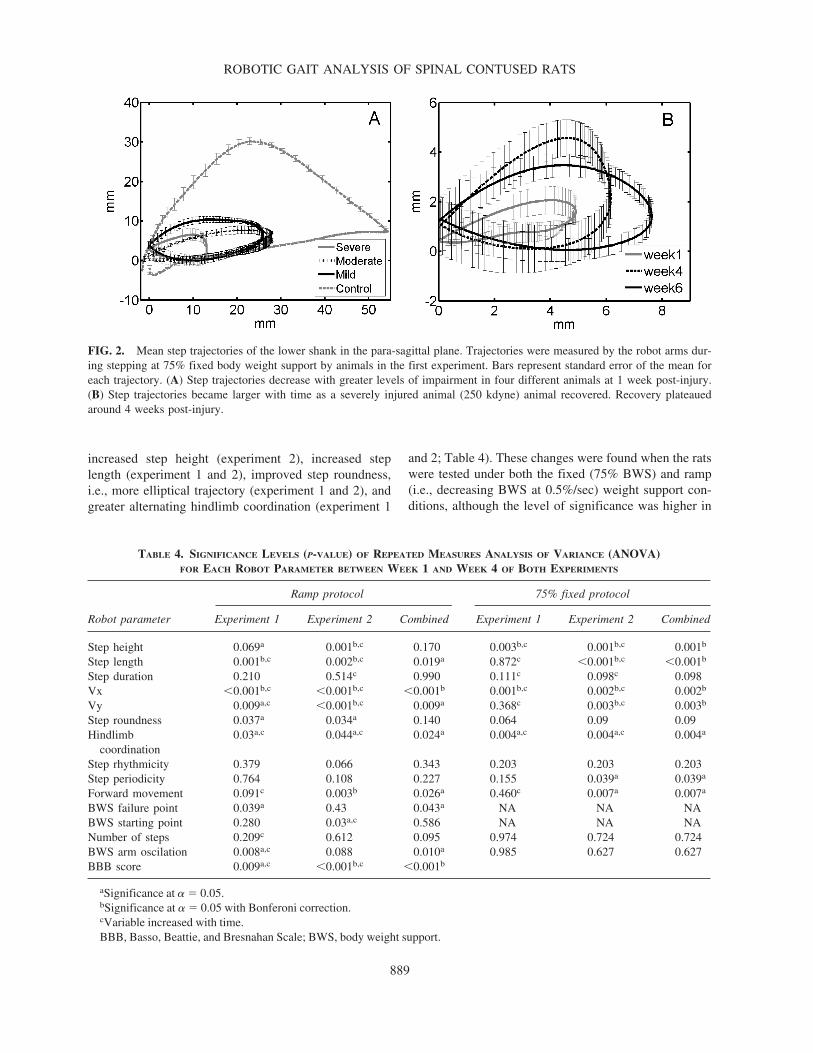
13.00 � 4.08 for severe, moderate, and mild, respec-tively; Table 2), and in each of the robot measures ofbipedal, treadmill locomotion. For example, initial mea-surements (week 1) of mean step length (15.47 � 4.82mm) and step height (10.47 � 3.66 mm) in the first ex-periment were substantially less for contused animalsduring ramped BWS trials, when compared to those mea-sured for an uninjured control animal (60 mm and 30 mm, respectively; Table 2 and Fig. 2A).
The mean BBB score for mildly injured animals var-ied significantly between the first experiment and the sec-ond (13 � 4.08 and 11 � 0.81, independent t-test, p �0.017). This difference may have resulted from the op-erator gaining more experience with the impact device.In particular, the operator’s impression was that two an-imals in the first experiment received injuries that wereslightly less severe than intended (desired force 150
kdyne). Consistent with this impression, the two ques-tionable injuries in the first experiment resulted in BBBscores (17.27 � 3.00 and 14.14 � 2.65, mean � SDacross 12 weeks) that were above the mean for mildlyinjured animals (mean BBB � 13 � 4.08, mean � SDacross 12 weeks). However, these scores were still lessthan that of a normal animal (BBB � 21). Similarly, therobot measures for each of these animals were consistentwith their injury severity, and were within one standarddeviation of the mean for mildly injured animals. Treat-ing these animals as outliers and removing them from theanalysis did not change the statistical results.
Several of the robotic measures of hindlimb step cy-cle trajectories changed with time following measure-ments taken at week 1 (Fig. 2A,B and Tables 2 and 3).These changes occurred primarily during the first 4 weekspost-injury, then changed little from 4 to 12 weeks post-
ROBOTIC GAIT ANALYSIS OF SPINAL CONTUSED RATS
887
TABLE 1. DEFINITIONS OF ROBOT MEASURES
Step height The distance between the lowest and highest point in the Y (superior-inferior) direction of a step.Step length The distance between the least and greatest points in the X (anterior-posterior) direction of a
step.Step duration The amount of time elapsed between the beginning and ending of a step.Vx, Vy The maximum velocity achieved in the X (anterior-posterior) or Y (vertical) directions.Step roundness A measure of the shape or quality of a step. This was found by correlating the X and Y position
data. A score of 0 indicates that X and Y are 90 degrees out of phase (circular), a score of 1indicates that the trajectory is flat, and a score of about 0.3 indicates a normal (elliptical) steptrajectory.
Hindlimb coordination A measure of coordination during hindlimb stepping. X and Y position data for each hindlimbwere correlated with the contralateral limb, resulting in a measure that indicates theirrelationship. A score of 0 indicates that they are 90 degrees out of phase, and a score of 1indicates that they are in phase. The normative value is approximately 0.4, as measured from anon-injured animal.
Step rhythmicity A measure of the consistency of step duration. This value is the standard deviation of the stepdurations.
Step periodicity A measure of locomotor continuity. This is the mean duration between the end of each step andthe beginning of the next.
Forward movement A measure of motor activity, whether or not it contributes to a step. This is the percentage oftime during an entire trial for which the animal’s hindlimbs have a forward velocity (againstthe motion of the treadmill).
BWS failure point A measure of the animal’s ability to bear weight. As BWS is ramped down, the animal bears anincreased amount of its body weight, until it is no longer able to step and falls. The amount ofsupport at this point is the BWS failure point.
BWS starting point A measure of the animal’s need for load in order to initiate stepping. As BWS is ramped downinitially from 100%, the animals do not initiate stepping until a particular amount of load isreached. Presumably, at this point, the load-related sensory input is sufficient to triggerstepping. The point at which stepping is initiated is terms BWS starting point.
Number of steps The number of steps taken over the duration of a trial. During ramped trials, this is related toBWS failure point, as the more weight an animal can bear, the greater the duration of the trialin which to step.
BWS arm oscillation A measure of the vertical displacement of the animal’s center of mass. Measured as the meanamplitude of BWS arm oscillation during each step.
BWS, body weight support.
injury. Analysis of data in the first experiment beyondweek 4 using a multivariate mixed model ANOVA re-vealed that overall, some combination of the data pointschanged significantly between weeks 4 and 12 (MMMANOVA, p � 0.003, Experiment 1). However, furtheranalysis with individual repeated measures ANOVAsdemonstrated that none of the measures changed indi-
vidually with time (mean p � 0.374). There was a sig-nificant effect of time from weeks 1 to 4 for the 14 ro-bot measures taken together (MMM ANOVA, p �0.002). The changes in individual robot measures thatwere significant (before Bonferoni correction) betweenweek one and four were: increased swing velocities inthe x and y direction (Vx and Vy, experiment 1 and 2),
NESSLER ET AL.
888
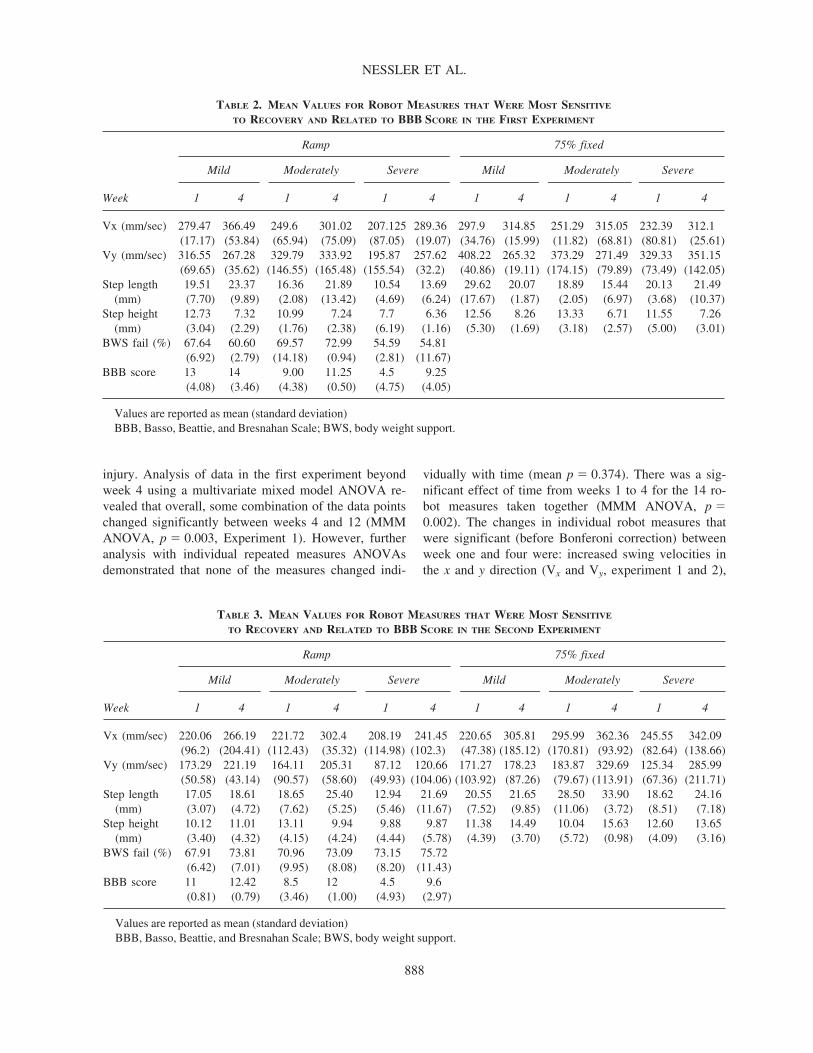
TABLE 2. MEAN VALUES FOR ROBOT MEASURES THAT WERE MOST SENSITIVE
TO RECOVERY AND RELATED TO BBB SCORE IN THE FIRST EXPERIMENT
Ramp 75% fixed
Mild Moderately Severe Mild Moderately Severe
Week 1 4 1 4 1 4 1 4 1 4 1 4
Vx (mm/sec) 279.47 366.49 249.6 301.02 207.125 289.36 297.9 314.85 251.29 315.05 232.39 312.1(17.17) (53.84) (65.94) (75.09) (87.05) (19.07) (34.76) (15.99) (11.82) (68.81) (80.81) (25.61)
Vy (mm/sec) 316.55 267.28 329.79 333.92 195.87 257.62 408.22 265.32 373.29 271.49 329.33 351.15(69.65) (35.62) (146.55) (165.48) (155.54) (32.2) (40.86) (19.11) (174.15) (79.89) (73.49) (142.05)
Step length 19.51 23.37 16.36 21.89 10.54 13.69 29.62 20.07 18.89 15.44 20.13 21.49(mm) (7.70) (9.89) (2.08) (13.42) (4.69) (6.24) (17.67) (1.87) (2.05) (6.97) (3.68) (10.37)
Step height 12.73 7.32 10.99 7.24 7.7 6.36 12.56 8.26 13.33 6.71 11.55 7.26(mm) (3.04) (2.29) (1.76) (2.38) (6.19) (1.16) (5.30) (1.69) (3.18) (2.57) (5.00) (3.01)
BWS fail (%) 67.64 60.60 69.57 72.99 54.59 54.81(6.92) (2.79) (14.18) (0.94) (2.81) (11.67)
BBB score 13 14 9.00 11.25 4.5 9.25(4.08) (3.46) (4.38) (0.50) (4.75) (4.05)
Values are reported as mean (standard deviation)BBB, Basso, Beattie, and Bresnahan Scale; BWS, body weight support.
TABLE 3. MEAN VALUES FOR ROBOT MEASURES THAT WERE MOST SENSITIVE
TO RECOVERY AND RELATED TO BBB SCORE IN THE SECOND EXPERIMENT
Ramp 75% fixed
Mild Moderately Severe Mild Moderately Severe
Week 1 4 1 4 1 4 1 4 1 4 1 4
Vx (mm/sec) 220.06 266.19 221.72 302.4 208.19 241.45 220.65 305.81 295.99 362.36 245.55 342.09(96.2) (204.41) (112.43) (35.32) (114.98) (102.3) (47.38) (185.12) (170.81) (93.92) (82.64) (138.66)
Vy (mm/sec) 173.29 221.19 164.11 205.31 87.12 120.66 171.27 178.23 183.87 329.69 125.34 285.99(50.58) (43.14) (90.57) (58.60) (49.93) (104.06) (103.92) (87.26) (79.67) (113.91) (67.36) (211.71)
Step length 17.05 18.61 18.65 25.40 12.94 21.69 20.55 21.65 28.50 33.90 18.62 24.16(mm) (3.07) (4.72) (7.62) (5.25) (5.46) (11.67) (7.52) (9.85) (11.06) (3.72) (8.51) (7.18)
Step height 10.12 11.01 13.11 9.94 9.88 9.87 11.38 14.49 10.04 15.63 12.60 13.65(mm) (3.40) (4.32) (4.15) (4.24) (4.44) (5.78) (4.39) (3.70) (5.72) (0.98) (4.09) (3.16)
BWS fail (%) 67.91 73.81 70.96 73.09 73.15 75.72(6.42) (7.01) (9.95) (8.08) (8.20) (11.43)
BBB score 11 12.42 8.5 12 4.5 9.6(0.81) (0.79) (3.46) (1.00) (4.93) (2.97)
Values are reported as mean (standard deviation)BBB, Basso, Beattie, and Bresnahan Scale; BWS, body weight support.
ROBOTIC GAIT ANALYSIS OF SPINAL CONTUSED RATS
889
TABLE 4. SIGNIFICANCE LEVELS (P-VALUE) OF REPEATED MEASURES ANALYSIS OF VARIANCE (ANOVA) FOR EACH ROBOT PARAMETER BETWEEN WEEK 1 AND WEEK 4 OF BOTH EXPERIMENTS
Ramp protocol 75% fixed protocol
Robot parameter Experiment 1 Experiment 2 Combined Experiment 1 Experiment 2 Combined
Step height 0.069a 0.001b,c 0.170 0.003b,c 0.001b,c 0.001b
Step length 0.001b,c 0.002b,c 0.019a 0.872c �0.001b,c �0.001b
Step duration 0.210 0.514c 0.990 0.111c 0.098c 0.098Vx �0.001b,c �0.001b,c �0.001b 0.001b,c 0.002b,c 0.002b
Vy 0.009a,c �0.001b,c 0.009a 0.368c 0.003b,c 0.003b
Step roundness 0.037a 0.034a 0.140 0.064 0.09 0.09Hindlimb 0.03a,c 0.044a,c 0.024a 0.004a,c 0.004a,c 0.004a
coordinationStep rhythmicity 0.379 0.066 0.343 0.203 0.203 0.203Step periodicity 0.764 0.108 0.227 0.155 0.039a 0.039a
Forward movement 0.091c 0.003b 0.026a 0.460c 0.007a 0.007a
BWS failure point 0.039a 0.43 0.043a .NA .NA .NABWS starting point 0.280 0.03a,c 0.586 .NA .NA .NANumber of steps 0.209c 0.612 0.095 0.974 0.724 0.724BWS arm oscilation 0.008a,c 0.088 0.010a 0.985 0.627 0.627BBB score 0.009a,c �0.001b,c �0.001b
aSignificance at � � 0.05.bSignificance at � � 0.05 with Bonferoni correction.cVariable increased with time.BBB, Basso, Beattie, and Bresnahan Scale; BWS, body weight support.
increased step height (experiment 2), increased steplength (experiment 1 and 2), improved step roundness,i.e., more elliptical trajectory (experiment 1 and 2), andgreater alternating hindlimb coordination (experiment 1
and 2; Table 4). These changes were found when the ratswere tested under both the fixed (75% BWS) and ramp(i.e., decreasing BWS at 0.5%/sec) weight support con-ditions, although the level of significance was higher in
FIG. 2. Mean step trajectories of the lower shank in the para-sagittal plane. Trajectories were measured by the robot arms dur-ing stepping at 75% fixed body weight support by animals in the first experiment. Bars represent standard error of the mean foreach trajectory. (A) Step trajectories decrease with greater levels of impairment in four different animals at 1 week post-injury.(B) Step trajectories became larger with time as a severely injured animal (250 kdyne) animal recovered. Recovery plateauedaround 4 weeks post-injury.
890
FIG
. 3.
Bas
so, B
eatti
e, a
nd B
resn
ahan
Sca
le (
BB
B)
and
max
imum
for
war
d sw
ing
velo
city
as
a fu
nctio
n of
rec
over
y tim
e (A
,B,D
,E),
and
ver
sus
each
oth
er (
C,F
). T
he f
irst
row
(A
–C)
show
s th
e re
sults
of
expe
rim
ent
1, a
nd t
he s
econ
d ro
w s
how
s th
e re
sults
of
expe
rim
ent
2 (D
–F).
The
lin
es i
n pa
rts
A,
B,
D,
and
E a
re a
lea
st s
quar
es,
5th
orde
rpo
lyno
mia
l fi
t to
the
dat
a po
ints
, and
the
bar
s re
pres
ent
the
stan
dard
err
or. E
ach
data
poi
nt i
n pa
rts
C a
nd F
rep
rese
nts
one
anim
al o
n on
e da
ta c
olle
ctio
n da
y (1
2 an
imal
s an
d12
dat
a co
llect
ion
days
for
exp
erim
ent
1, a
nd 1
7 an
imal
s an
d 12
dat
a co
llect
ion
days
for
exp
erim
ent
2).
Part
s A
, B
, D
, an
d E
dep
ict
sign
ific
ant
chan
ges
acro
ss t
ime
in B
BB
scor
e an
d m
axim
um f
orw
ard
swin
g ve
loci
ty f
or t
he f
irst
4 w
eeks
pos
t-in
jury
. T
here
was
a s
igni
fica
nt d
iffe
renc
e be
twee
n in
jury
lev
els
for
the
BB
B s
core
in
the
firs
t ex
peri
-m
ent,
but
not
for
max
imum
for
war
d sw
ing
velo
city
or
BB
B s
core
in
expe
rim
ent
2.

the ramp condition. Though significant impairment re-mained, even after 12 weeks, the trend for the recordedchanges in the contused animals was to become closer tovalues measured for an uninjured control animal, whosemean step trajectory is depicted in Figure 2A. Thechanges that were significant for both experiments takentogether after the Bonferoni correction were step height,step length, Vx, and Vy.
There was a significant difference detected betweenthe levels of contusion injury with the robotic measureof step length (p � 0.05), but none of the other robotmeasures demonstrated a statistically significant differ-ence. Tukey post-hoc analysis determined that this dif-ference lied between the severe and moderate injury lev-els (p � 0.042), but not between the moderate and mildinjury levels. Similarly, BBB score was not significantlydifferent between injury groups in the first experiment(p � 0.086), but was significantly different in the secondexperiment (p � 0.027). Post hoc analysis revealed thatthis difference lied between the mild and the severe in-jury groups (p � 0.022). With both experiments com-bined, BBB score was not different between injury lev-els (p � 0.795).
Results from the second mixed model ANOVA per-formed on each variable (experiment by time) indicatedthat some of the robot measures were significantly dif-ferent between the first and the second experiment. Thevariables with a significant difference were forwardswing velocity (Vx, p � 0.012), lift swing velocity (Vy,p � 0.001), step height (p � 0.006), BWS starting point(p � 0.005), and BWS failure point (p � 0.001). Stepheight was strongly related to recovery in both experi-ments, but it decreased with recovery in the first exper-iment and increased in the second experiment. Animalswith greater locomotor ability tended to jump or hopwhen first provided with body weight support, but thenreduced their mean step height as they learned the dy-namics of the novel environment. The difference in stepheight between the two experiments might be explainedby the difference in BBB score between the mild groupsof each experiment, as animals in the first experimentwere less impaired and more prone to hopping.
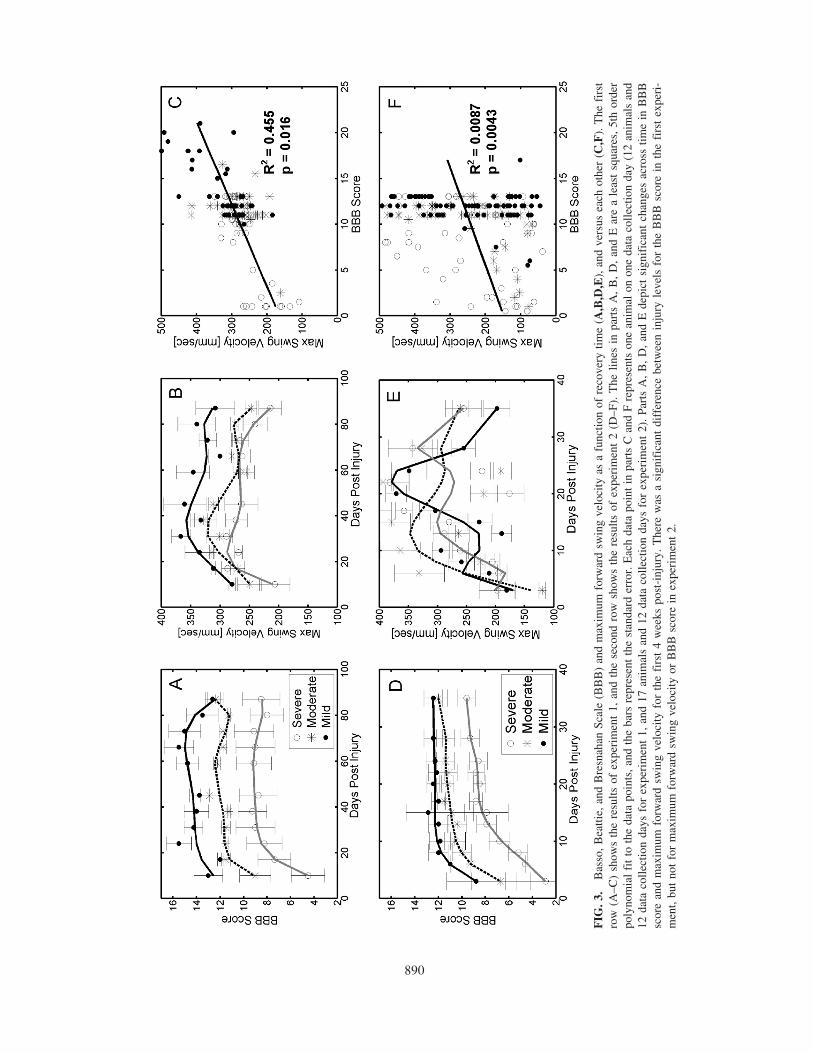
Recovery of open field locomotion based on BBBscore also changed in the weeks following contusion, andreached a plateau approximately 4 weeks post-injury(Fig. 3A,D). Similar plateaus in the BBB score 3–4 weekspost-injury have been reported elsewhere for contusedanimals (Hamers et al., 2001; Hase et al., 2002; Metz etal., 2000). Multiple linear regression of all 14 robot mea-sures indicated a significant relationship with BBB score(R2 � 0.145, p � 0.009). Similarly, individual changes inseveral robotic measures of hindlimb treadmill steppingwere correlated significantly with open field locomotion,
and forward swing velocity (Vx) appeared to be the ro-bot measure that was most sensitive to recovery, and thatdemonstrated the strongest correlation with improvedBBB scores (Fig. 3B,C,E,F). In addition to Vx, changesin step height, step length, percent forward movement,and bilateral hindlimb coordination (Table 5) were alsosignificantly correlated with the improvements in openfield locomotion. Step roundness (experiment 2) im-proved with increasing BBB score, though the relation-ship was not significant (p � 0.089; Table 5). The mea-sures that were significantly correlated with the BBBscore for both experiments taken together after the Bon-feroni correction were step height, step length, step du-ration, Vx, Vy, rhythmicity, percent forward movement,BWS failure point, and BWS starting point for the rampBWS protocol. Only Vx was significantly correlated forthe fixed BWS protocol following Bonferoni correction.
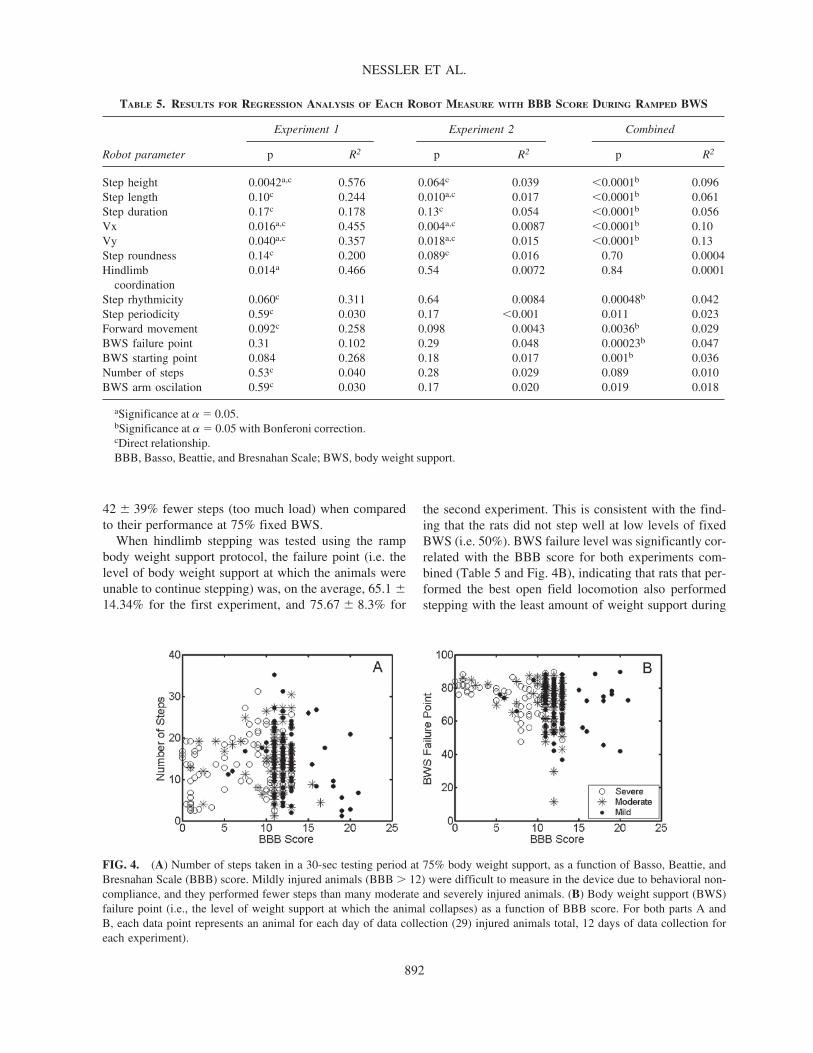
The number of steps performed by the rats during fixedand ramp training did not improve over time, nor was itcorrelated to the BBB score (Tables 4 and 5, and Fig.4A). However, step quantity did appear to be directly re-lated to BBB score from severely injured animals to mod-erately injured animals (BBB 0–13), but inversely relatedto BBB scores above 14 (Fig. 4A). At 75% fixed bodyweight support, moderately injured animals took moresteps over both experiments than both the severely in-jured animals (22.78 � 16.23 vs. 13.9 � 5.13, indepen-dent t-test, p � 0.001) and the mildly injured animals(14.18 � 5.62, p � 0.0588) when collapsed across time.These results suggest that stepping quantity may increasewith recovery of open field locomotion (BBB score) onlyin severe to moderate injuries (repeated measuresANOVA, p � 0.15 for BBB score � 12).
Effect of Body Weight Support on Stepping after Contusion
All of the animals were evaluated using both a fixedand ramped BWS protocol. In each instance, we deter-mined the robot measures that were sensitive to recoveryor correlated with BBB score and found that the most ef-fective measurements were similar for both BWS proto-cols. However, when BWS level was fixed at 50%, 75%,or 90%, the total number of steps taken by the animalsvaried greatly. Most likely there is an optimal level ofweight support at which the animal bears enough load togenerate sensory input required for consistent stepping,but not so much load that the animal cannot support it-self. The results for the number of steps taken indicatethat 75% BWS was the closest to this optimal level inour experiments. While stepping at 90% BWS, the ani-mals averaged 19 � 31% fewer steps (not enough load),and while stepping at 50% BWS the animals averaged
891
ROBOTIC GAIT ANALYSIS OF SPINAL CONTUSED RATS
42 � 39% fewer steps (too much load) when comparedto their performance at 75% fixed BWS.
When hindlimb stepping was tested using the rampbody weight support protocol, the failure point (i.e. thelevel of body weight support at which the animals wereunable to continue stepping) was, on the average, 65.1 �14.34% for the first experiment, and 75.67 � 8.3% for
the second experiment. This is consistent with the find-ing that the rats did not step well at low levels of fixedBWS (i.e. 50%). BWS failure level was significantly cor-related with the BBB score for both experiments com-bined (Table 5 and Fig. 4B), indicating that rats that per-formed the best open field locomotion also performedstepping with the least amount of weight support during
NESSLER ET AL.
892
FIG. 4. (A) Number of steps taken in a 30-sec testing period at 75% body weight support, as a function of Basso, Beattie, andBresnahan Scale (BBB) score. Mildly injured animals (BBB � 12) were difficult to measure in the device due to behavioral non-compliance, and they performed fewer steps than many moderate and severely injured animals. (B) Body weight support (BWS)failure point (i.e., the level of weight support at which the animal collapses) as a function of BBB score. For both parts A andB, each data point represents an animal for each day of data collection (29) injured animals total, 12 days of data collection foreach experiment).
TABLE 5. RESULTS FOR REGRESSION ANALYSIS OF EACH ROBOT MEASURE WITH BBB SCORE DURING RAMPED BWS
Experiment 1 Experiment 2 Combined
Robot parameter p R2 p R2 p R2
Step height 0.0042a,c 0.576 0.064c 0.039 �0.0001b 0.096Step length 0.10c 0.244 0.010a,c 0.017 �0.0001b 0.061Step duration 0.17c 0.178 0.13c 0.054 �0.0001b 0.056Vx 0.016a,c 0.455 0.004a,c 0.0087 �0.0001b 0.10Vy 0.040a,c 0.357 0.018a,c 0.015 �0.0001b 0.13Step roundness 0.14c 0.200 0.089c 0.016 0.70 0.0004Hindlimb 0.014a 0.466 0.54 0.0072 0.84 0.0001
coordinationStep rhythmicity 0.060c 0.311 0.64 0.0084 0.00048b 0.042Step periodicity 0.59c 0.030 0.17 �0.001 0.011 0.023Forward movement 0.092c 0.258 0.098 0.0043 0.0036b 0.029BWS failure point 0.31 0.102 0.29 0.048 0.00023b 0.047BWS starting point 0.084 0.268 0.18 0.017 0.001b 0.036Number of steps 0.53c 0.040 0.28 0.029 0.089 0.010BWS arm oscilation 0.59c 0.030 0.17 0.020 0.019 0.018
aSignificance at � � 0.05.bSignificance at � � 0.05 with Bonferoni correction.cDirect relationship.BBB, Basso, Beattie, and Bresnahan Scale; BWS, body weight support.
the robotic tests. Across all of the animals, BWS failurepoint decreased (improved) over time, though not sig-nificantly with the Bonferoni correction (p � 0.043;Table 4). When the data for mildly injured animals (BBBscore � 12) were omitted from the analysis, the signifi-cance level for BWS failure point across time improvedslightly (p � 0.037), and remained significantly corre-lated to the BBB score.
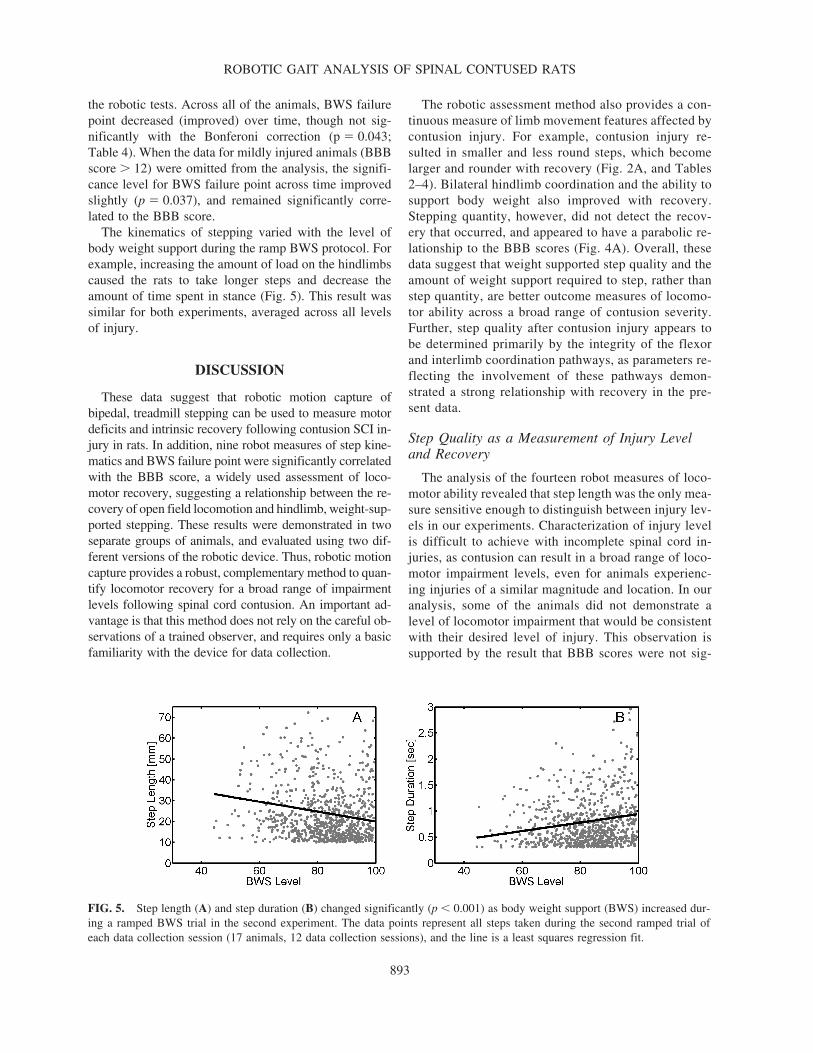
The kinematics of stepping varied with the level ofbody weight support during the ramp BWS protocol. Forexample, increasing the amount of load on the hindlimbscaused the rats to take longer steps and decrease theamount of time spent in stance (Fig. 5). This result wassimilar for both experiments, averaged across all levelsof injury.
DISCUSSION
These data suggest that robotic motion capture ofbipedal, treadmill stepping can be used to measure motordeficits and intrinsic recovery following contusion SCI in-jury in rats. In addition, nine robot measures of step kine-matics and BWS failure point were significantly correlatedwith the BBB score, a widely used assessment of loco-motor recovery, suggesting a relationship between the re-covery of open field locomotion and hindlimb, weight-sup-ported stepping. These results were demonstrated in twoseparate groups of animals, and evaluated using two dif-ferent versions of the robotic device. Thus, robotic motioncapture provides a robust, complementary method to quan-tify locomotor recovery for a broad range of impairmentlevels following spinal cord contusion. An important ad-vantage is that this method does not rely on the careful ob-servations of a trained observer, and requires only a basicfamiliarity with the device for data collection.
The robotic assessment method also provides a con-tinuous measure of limb movement features affected bycontusion injury. For example, contusion injury re-sulted in smaller and less round steps, which becomelarger and rounder with recovery (Fig. 2A, and Tables2–4). Bilateral hindlimb coordination and the ability tosupport body weight also improved with recovery.Stepping quantity, however, did not detect the recov-ery that occurred, and appeared to have a parabolic re-lationship to the BBB scores (Fig. 4A). Overall, thesedata suggest that weight supported step quality and theamount of weight support required to step, rather thanstep quantity, are better outcome measures of locomo-tor ability across a broad range of contusion severity.Further, step quality after contusion injury appears tobe determined primarily by the integrity of the flexorand interlimb coordination pathways, as parameters re-flecting the involvement of these pathways demon-strated a strong relationship with recovery in the pre-sent data.
Step Quality as a Measurement of Injury Leveland Recovery
The analysis of the fourteen robot measures of loco-motor ability revealed that step length was the only mea-sure sensitive enough to distinguish between injury lev-els in our experiments. Characterization of injury levelis difficult to achieve with incomplete spinal cord in-juries, as contusion can result in a broad range of loco-motor impairment levels, even for animals experienc-ing injuries of a similar magnitude and location. In ouranalysis, some of the animals did not demonstrate alevel of locomotor impairment that would be consistentwith their desired level of injury. This observation issupported by the result that BBB scores were not sig-
ROBOTIC GAIT ANALYSIS OF SPINAL CONTUSED RATS
893
FIG. 5. Step length (A) and step duration (B) changed significantly (p � 0.001) as body weight support (BWS) increased dur-ing a ramped BWS trial in the second experiment. The data points represent all steps taken during the second ramped trial ofeach data collection session (17 animals, 12 data collection sessions), and the line is a least squares regression fit.

nificantly different between injury levels when the datawas combined for both experiments. Measures of theunderlying pathology at the lesion site, such as lesionvolume or spared white matter, may in future studieshelp to more accurately classify animals into appropri-ate injury levels and improve the sensitivity of robotmeasures.
There were also significant differences in locomotorperformance between the two experiments. The overalltrend was for animals to demonstrate decreased swingvelocities and smaller steps in the second experimentwhen compared to values from the first experiment (Ta-bles 2 and 3). One explanation for these differences mightbe a higher level of friction in the hindlimb linkages ofthe commercial version of the rat stepper due to its useof plain bearings instead of ball bearings at the robotjoints.
Previous analyses of quadrupedal, overground step-ping have led several authors to report a weak to mod-erate relationship between kinematic parameters of gaitand spontaneous recovery in contused rats. For exam-ple, Hamers et al. (2001) reported that stride length andswing duration were both decreased following contu-sion SCI and didn’t appear to recover, even after 14weeks. Similarly, the study of quadrupedal, treadmilllocomotion has led other investigators to report onlymodest success with the measurement of kinematic pa-rameters in contused animals. Keagi et al. (2001) ob-served a deficit in step duration and rhythmicity imme-diately following injury, and then a recovery thatapproached pre-injury levels within 2 weeks after tread-mill training. Fouad et al. (2000) reported a decrease inhindlimb yield during stance and an increase in exten-sion before hindlimb liftoff with training in incompletespinal cord injured rats, both measures related to the an-imal’s ability to support body weight.
The present results indicate that certain aspects ofbipedal stepping kinematics are significantly related to in-trinsic recovery following contusion SCI in rats. In addi-tion to step length and step duration as reported in previous quadrupedal studies, step velocities, step round-ness, step height, weight support, and bilateral coordina-tion were also shown to be sensitive to locomotor recov-ery. One reason for the discrepancy between these resultsand previous experiments may be that, unlike the previousstudies, precisely controlled hindlimb weight support wasprovided as the animals stepped. It is possible that the in-ability of a contused rat to maintain weight support mayinterfere with stepping quality, thus reducing the efficacyof kinematic measurements without controlled weight sup-port. This is supported by the result that both step lengthand step duration changed significantly as animals wererequired to bear more weight, and also by the observation
that the animals took few steps with low levels of weightsupport (50%; Figs. 4 and 5).
Swing velocity has received little attention in previousgait analysis studies, yet these data indicate that it is per-haps the best measure of locomotor function. The in-ability to move the leg rapidly through swing suggeststhat contusion injury causes impairment in hindlimbflexor circuitry, which then partially recovers with time.Similar results have been reported to occur with loco-motor training in spinal transected cats (de Leon et al.,1998).
Step Quantity, Contusion Severity, and Integrityof Volitional Motor Control
The number of steps taken in the device was not sen-sitive to recovery, nor correlated with the BBB score,across the wide range of injury levels tested here. Ro-botic assessment of step quantity may not be a good in-dicator of recovery following contusion injury becausesparing of descending tracts that control spinal locomo-tor circuits may allow the animal to choose not to step(Fig. 4A). Our experience is that it is difficult to test step-ping of intact animals for extended periods in the rat step-per because these animals typically drag their legs on thetreadmill. Conversely, rats transected as neonates lacksupraspinal input and readily step in the device, demon-strating step quality, weight support ability, and in somecases step quantity that is sensitive to intrinsic recovery(de Leon et al., 2002a; Nessler et al., 2003; Timoszyk2003). The large variability between moderately contusedrats (BBB score 10–13; Fig. 4A) in number of steps takenpossibly arises as a result of whether the contusion in-jury destroys descending pathways associated with voli-tional control of the hindlimbs, and spares spinal circuitryassociated with the details of locomotor control itself.
Intact or mildly injured animals are then the most prob-lematic in terms of robotic gait analysis, and present alimitation to the use of the device for efficient outcomemeasurement. The present data demonstrate that accuratelocomotor assessment can still be achieved in these ani-mals if only a few steps can be elicited. Future studiesof robotic assessment must develop behavioral trainingtechniques, such as the use of rewards, to reinforce step-ping behaviors by intact and mild contused rats. In addi-tion, less restrictive harnesses may also improve steppingconsistency and perhaps allow quadrupedal locomotion.
Effects of Contusion on Body Weight Support Ability
Under fixed levels of weight support, the rats gener-ated the most steps at the 75% BWS level, and under theramped BWS protocol failed to support their weight at
NESSLER ET AL.
894

an average of 71.12 � 10.4% BWS. Thus, the level ofloading was important for eliciting bipedal stepping fol-lowing contusion injury. The animals required some load-ing to produce the load-related sensory transitions be-tween swing and stance that help drive normal gait (Canuand Falempin, 1998; Timoszyk et al., 2002b), but not somuch loading so as to prevent weight support. Thesethreshold levels of weight support were reflected in BWSstarting point and failure point in the present study, andboth were shown to change as the animals recovered lo-comotor ability (Table 5).
The BWS failure point was recently found to be a sen-sitive and reliable outcome assessment in rats transectedas neonates (Nessler et al., 2003), likely because theseanimals require weight support more uniformly, and havelittle volitional control over locomotion. These results areconsistent with the present data for contused animals.BWS failure point appeared to change the most acrossanimals that were more severely impaired (BBB score �12; Fig. 5). A BBB score of 12 separates animals that areable to bear their own body weight from those that can-not, and it is reasonable to expect BWS failure point tobe a more relevant measure for animals that are unableto support their weight independently. In contrast, out-come measures that require complete, weight-supportedsteps (e.g., paw print analysis and ladder climbing) aretypically only useful for moderate to mild injuries (BBBgreater than 12). As a result, some authors have suggesteda pre-evaluation of an animal’s BBB score in order to de-termine the most appropriate assessment method, whichmay include BWS ability in moderate to severely im-paired animals (Metz et al., 2000; Muir and Webb, 2000).The BWS failure point measure used in the present studymight also provide such a pre-evaluation, by indicatinganimals that need greater amounts of weight support dur-ing bipedal locomotion.
The level of BWS also influenced stepping quality,with animals taking longer, faster steps under less BWS.Load-related afferent information plays an important rolein modulating step timing and extensor activity of spinallocomotor circuits following complete SCI (Canu andFalempin, 1998; Timoszyk et al., 2002b). The present re-sults suggest that the contused spinal cord also “listensto” and adapts to load-related afferent information.
Future Directions for Research
Weight supported step quality, and, in particular, swingvelocities, were most sensitive to locomotor recovery fol-lowing contusion injury in the bipedal, treadmill steppingparadigm studied here. A logical extension of this workis to examine these measures in the more natural settingof quadrupedal and overground stepping. Toward this
end, we are currently developing a lightweight cart andtrack system that combines small cameras with a BWSsystem that can assist impaired animals as they movealong a predetermined path. This device will allow forthe assessment of quadrupedal limb coordination in se-verely injured animals that might not use their hindlimbsto step without weight assistance.
The rat stepper also has the potential to bring a new,interactive dimension to gait assessment, through the useof its active, robotic properties. The device might be usedto deliberately perturb an animal’s limb movements orpostural support during locomotion, and then to quantifythe capacity of the injured motor control system to com-pensate for error (Nessler et al., 2005). Along these lines,but without a robotic device, Mulligan et al. (2002) re-cently used fruit-loop feeding to perturb posture of in-complete SCI animals, and found that the locus of thepostural center of pressure reflected impairment level.The ability to successfully sense and respond to dynamicperturbations is a key component of locomotor function,and thus is a logical target for expanding a quantitative,mechanistic understanding of recovery from SCI.
ACKNOWLEDGMENT
The authors are grateful for the support of the follow-ing NIH grants: N01 NS3235 and R01 NS42951.
REFERENCES
BASSO, D.M., BEATTIE, M.S., and BRESNAHAN, J.C.(1995). A sensitive and reliable locomotor rating scale foropen field testing in rats. J. Neurotrauma 12, 1–21.
BASSO, D.M., BEATTIE, M.S., and BRESNAHAN, J.C.(1996). Graded histological and locomotor outcomes afterspinal cord contusion using the NYU weight-drop device ver-sus transection. Exp. Neurobiol. 139, 244–256.
BASSO, D.M. (2004). Behavioral testing after spinal cord in-jury: congruities, complexities, and controversies. J. Neuro-trauma 21, 395–404.
CANU, M.-H., and FALEMPIN, M. (1998). Effect of hindlimbunloading on interlimb coordination during treadmill loco-motion in the rat. Eur. J. Appl. Physiol. 78, 509–515.
CHENG, H., ALMSTROM, S., GIMENEZ-LLORT, M., et al.(1997). Gait analysis of adult paraplegic rats after spinal cordrepair. Exp. Neurol. 148, 544–547.
DE LEON, R.D., HODGSON, J.A., ROY, R.R., and EDGER-TON, V.R. (1998). Locomotor capacity attributable to steptraining versus spontaneous recovery after spinalization inadult cats. J. Neurophysiol. 79, 1329–1340.
DE LEON, R.D., REINKENSMEYER, D.J., TIMOSZYK,W.K., et al. (2002a). The use of robotics in assessing theadaptive capacity of the rat lumbar spinal cord. Prog. BrainRes. 137, 141–149.
ROBOTIC GAIT ANALYSIS OF SPINAL CONTUSED RATS
895

DE LEON, R.D., KUBASAK, M.D., PHELPS, P.E., et al.(2002b). Using robotics to teach the spinal cord to walk.Brain Res. Rev. 40, 267–273.
FOUAD, K., METZ, G.A.S., MERKLER, D., et al. (2000).Treadmill training in incomplete spinal cord injured rats. Be-hav. Brain Res. 115, 107–113.
HAMERS, F.P.T., LANKHORST, A.J., VAN LAAR, P., et al.(2001). Automated quantitative gait analysis during over-ground locomotion in the rat: its application to spinal cord con-tusion and transection injuries. J. Neurotrauma. 18, 187–201.
HASE, T., KAWAGUCHI, S., HAYASHI, H., et al. (2002).Locomotor performance of the rat after neonatal repairing of spinal cord injuries: quantitative assessment and elec-tromyographic study. J. Neurotrauma 19, 267–277.
HOWARD, C.S., BLAKENEY, D.C., MEDIGE, F., et al.(2000). Functional assessment in the rat by ground reactionforces. J. Biomech. 33, 751–757.
KAEGI, S., SCHWAB, M.E., DIETZ, V., et al. (2001). Elec-tromyographic activity associated with spontaneous func-tional recovery after spinal cord injury in rats. Eur. J. Neu-rosci. 16, 249–258.
LANKHORST, A.J., VERZIJL, M.R., and Hamers, F.P.T.(1999). Experimental spinal cord contusion injury: compar-ison of different outcome parameters. Neurosci. Res. Com-mun. 24, 135–148.
METZ, G.A.S., MERKLER, D., DIETZ, V., et al. (2000). Ef-ficient testing of motor function in spinal cord injured rats.Brain Res. 883, 165–177.
MUIR, G.D., and WEBB, A.A. (2000). Assessment of behav-ioural recovery following spinal cord injury in rats. Eur. J.Neurosci. 12, 3079–3086.
MULLIGAN, S.J., KNAPP, E., THOMPSON, B., et al. (2002).A method for assessing balance control in rodents. Biomed.Sci. Instrum. 38, 77–82.
MULTON, S., FRANZEN, R., POIRRIER, A.L., et al. (2003).The effect of treadmill training on motor recovery after a par-tial spinal cord compression-injury in the adult rat. J. Neu-rotrauma 20, 699–706.
NESSLER, J.A., REINKENSMEYER, D.J., TIMOSZYK,W.K., et al. (2003). The use of a robotic body weight supportmechanism to improve outcome assessment in the spinal cordinjured rodent. Presented at the 25th IEEE Engineering inMedicine and Biology Society Conference, Cancun, Mexico.
NESSLER, J.A., MINAKATA, K., SHARP, K., andREINKENSMEYER, D.J. (2005). Gait activity depends onlimb extension and phasing in spinal cord contused rodents:implications for robotic gait training and assessment. Pre-sented at the 9th International Conference on RehabilitationRobotics, Chicago.
NESSLER, J.A., TIMOSZYK, W.K., MERLO, M., et al.(2005). A robotic device for studying rodent locomotion af-ter spinal cord injury. IEEE Trans. Neural Syst. Rehabil. Eng.13, 497–506.
SCHEFF, S.W., RABCHEVSKY, A.G., FUGACCIA, I., et al.(2003). Experimental modeling of spinal cord injury: char-acterization of a force-defined injury device. J. Neurotrauma20, 179–193.
TIMOSZYK, W.K., MERLO, M., DE LEON, R.D., et al.(2002a). Second generation robotic systems for studying ro-dent locomotion following spinal cord injury. Presented atthe 2nd Joint IEEE Engineering in Medicine and Biology So-ciety/Biomedical Engineering Society Conference, Houston,Texas.
TIMOSZYK, W.K., DE LEON, R.D., LONDON, N., et al.(2002b). The rat lumbosacral spinal cord adapts to roboticloading applied during stance. J Neurophysiol. 88,3108–3117.
THOTA, A., CARLSON, S., and JUNG, R. (2001). Recov-ery of locomotor function after treadmill training of in-complete spinal cord injured rats. Biomed. Sci. Instrum.37, 63–68.
VRINTEN, D.H., and HAMERS, F.F.T. (2003). “CatWalk” au-tomated quantitative gait analysis as a novel method to as-sess mechanical allodynia in the rat; a comparison with vonFrey testing. Pain 102, 203–209.
Address reprint requests to:David J. Reinkensmeyer, Ph.D.
Department of Mechanical and Aerospace EngineeringCenter for Biomedical Engineering
4200 Engineering Gateway (EG3225)University of CaliforniaIrvine, CA 92697-3975
E-mail: [email protected]
NESSLER ET AL.
896
Related Documents











