Serif Mark II Proposal Paso Robles High School Engineering Department

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Serif Mark II ProposalPaso Robles High School Engineering Department

We Have an Idea
Build an arm that:
● mimics human motion
● is controlled by human motion
● is programmable
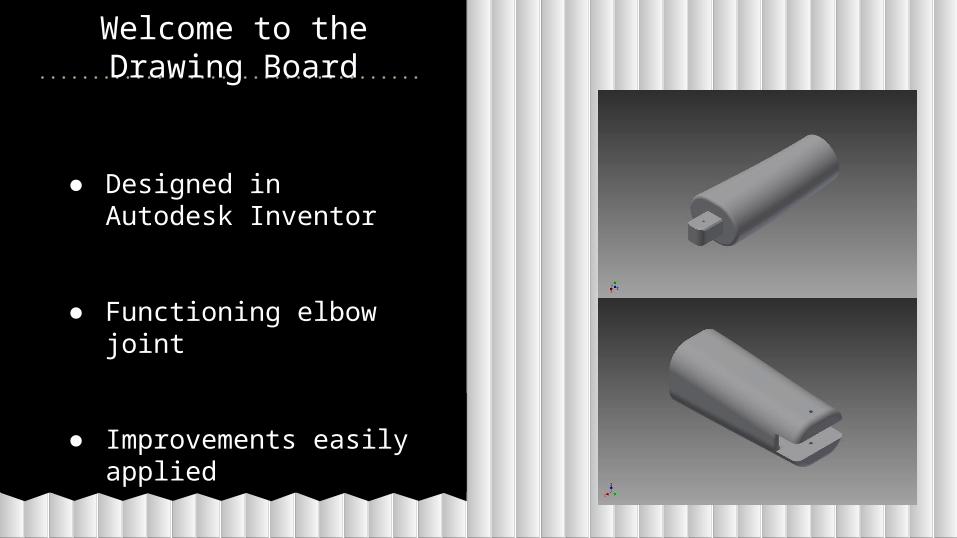
Welcome to the Drawing Board
● Designed in Autodesk Inventor
● Functioning elbow joint
● Improvements easily applied
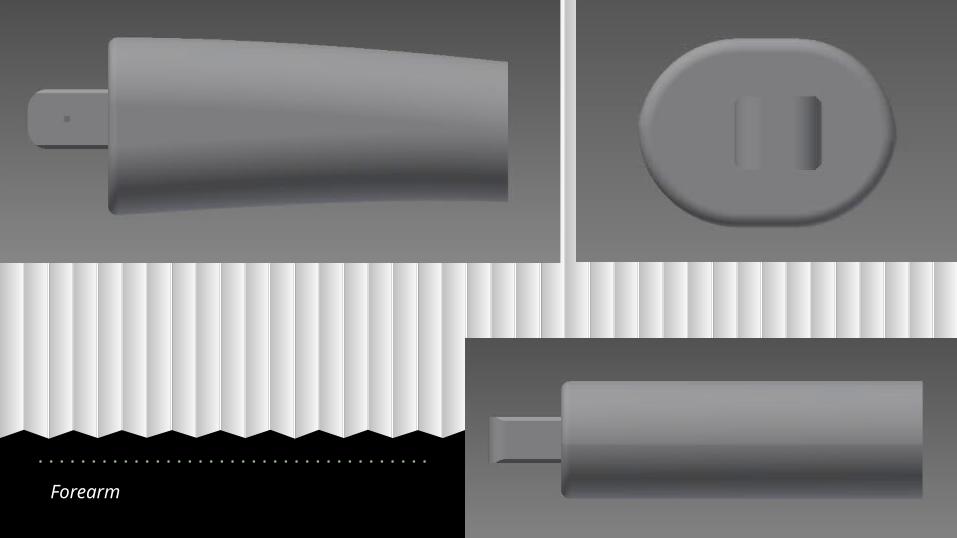
Forearm

Upper-Arm

● Motor rotates
● Rotates gear fixed on axel
● Moves forearm up/down
Designing the Elbow

We (Could) Have the Power

Building Something New
● Prototype for ball and socket joint
● Omni-Wheels
● Can be robotic

Intro
Gear ratios use different sizes and types of gears to change the speed and torque.

Speed
With the same input speed● Gears with more teeth (bigger) rotates proportionally slower because it takes more
teeth/rotation● Gears with less teeth (smaller)rotates proportionally faster because it takes less
teeth/rotation
Therefore● Speed in*Teeth in=Speed out*Teeth out or● Speed in*(Teeth in/Teeth out)=Speed out or● Speed in/(Teeth out/Teeth in)=Speed out or● Speed in/Gear reduction=Speed out
(“Teeth out/Teeth in” is gear reduction)
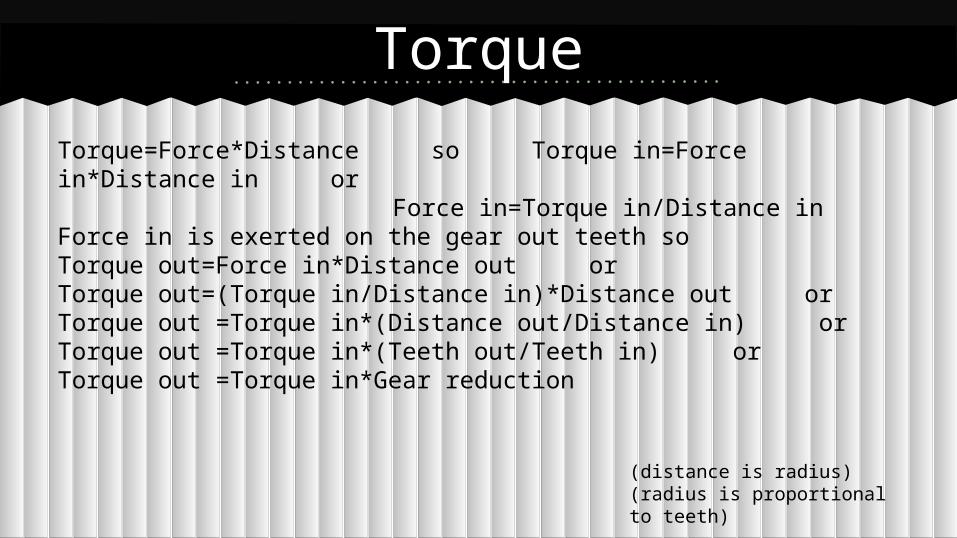
Torque
Torque=Force*Distance so Torque in=Force in*Distance in orForce in=Torque
in/Distance inForce in is exerted on the gear out teeth soTorque out=Force in*Distance out orTorque out=(Torque in/Distance in)*Distance out orTorque out =Torque in*(Distance out/Distance in) orTorque out =Torque in*(Teeth out/Teeth in) orTorque out =Torque in*Gear reduction
(distance is radius)(radius is proportional to teeth)
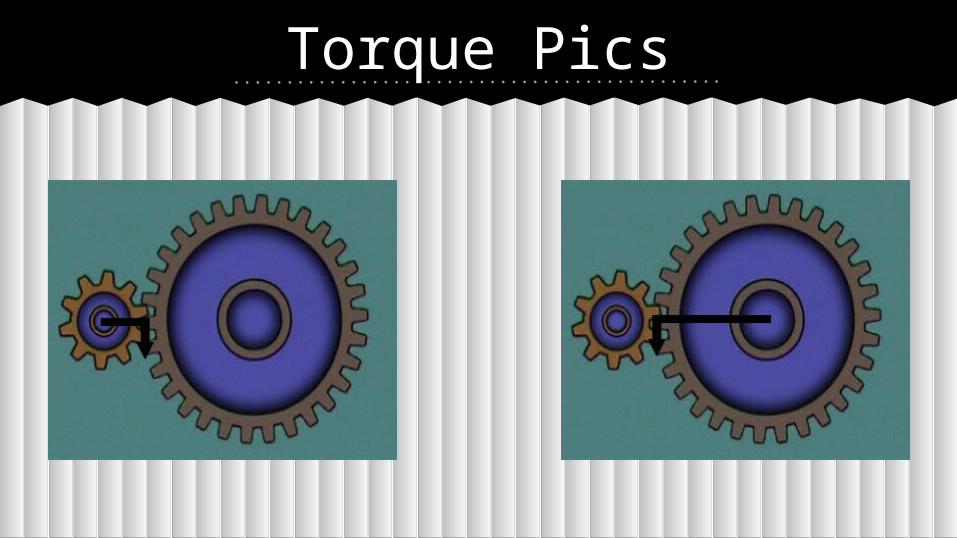
Torque Pics

More

What is a motor?
A machine, especially one powered by electricity or internal combustion, that supplies motive power to a vehicle or a device with moving parts.
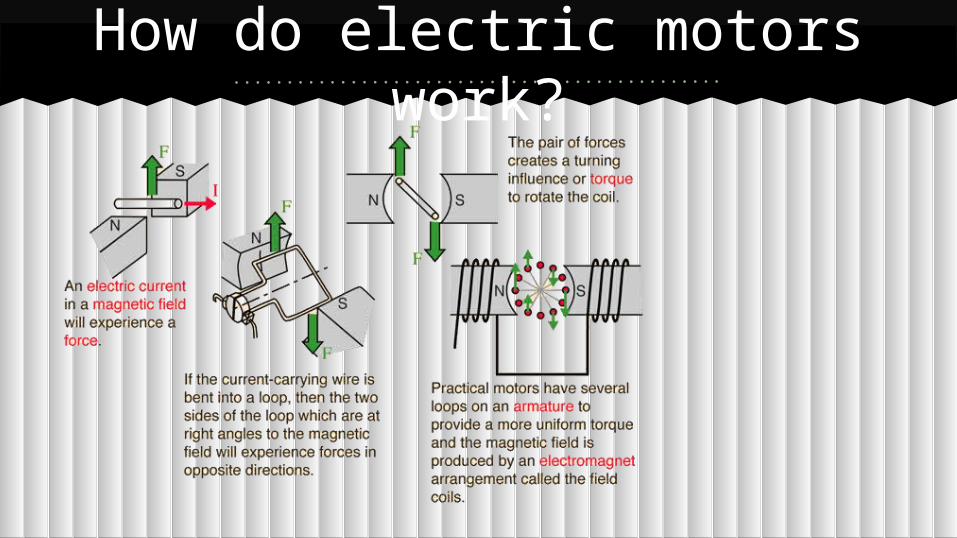
How do electric motors work?

Motor Strength
● Motor strength comes from the motor’s rotation speed and torque
● Depending on operating voltage, the stall torque can either be 25.5 kg x cm or 31.6kg x cm
● What this shows is how much weight a motor can hold when it isn’t rotating

Our Motors
● The motor we selected has the strongest stalltorque within our budget.● The resolution will help the arm mimic actions
precisely● The motors will be light enough to attach to
the arm without weighing it down

Introducing the Omni Wheel
● Rotate like normal wheels● Smaller wheels roll
perpendicular to rotational axis
● Two degrees of freedom

It’s Alive!
This is the prototype of a ball and socket joint
The Advantages
● More degrees of freedom with less joints
● Can rotate a ball
● Robotic
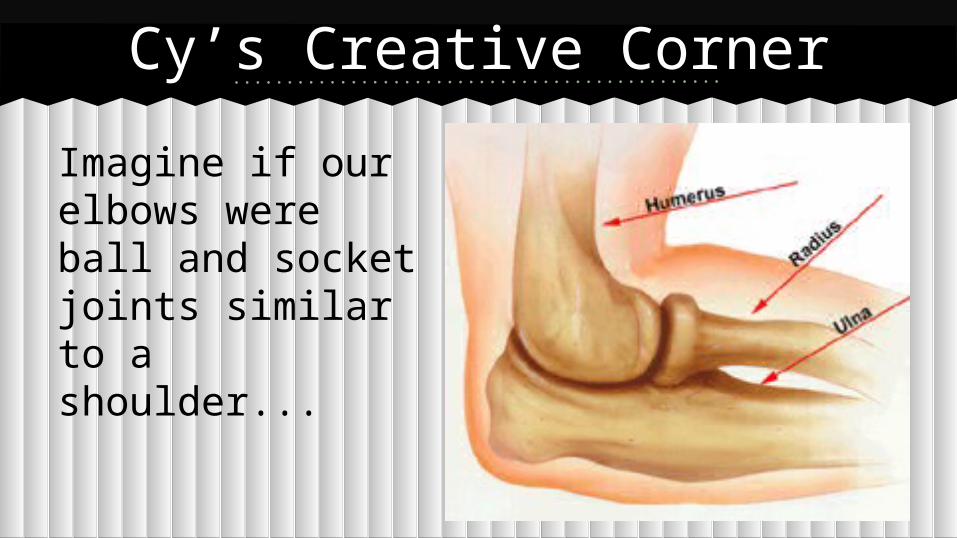
Cy’s Creative Corner
Imagine if our elbows were ball and socket joints similar to a shoulder...

Real World Applications
Manufacturing would be more efficient if they had less moving joints.
Related Documents



![Hydraulic Robotic Arm[1]](https://static.cupdf.com/doc/110x72/577c83d31a28abe054b667dc/hydraulic-robotic-arm1.jpg)







