IGOR M. VERNER ROBOT MANIPULATIONS: A SYNERGY OF VISUALIZATION, COMPUTATION AND ACTION FOR SPATIAL INSTRUCTION ABSTRACT. This article considers the use of a learning environment, RoboCell, where manipulations of objects are performed by robot operations specified through the lear- ner’s application of mathematical and spatial reasoning. A curriculum is proposed relating to robot kinematics and point-to-point motion, rotation of objects, and robotic assembly of spatial puzzles. Various instructional methods are supported by the RoboCell robot system, such as interactive demonstrations, modeling, computer simulations and robot operations, providing diverse activities in spatial perception, mental rotation and visualization. Pre-course and post-course tests in two middle schools and a high school indicated significant student progress in the tasks related to the categories of spatial ability which were practiced in the course. KEY WORDS: coordinate spaces and spatial operations, educational robotics, mechanical design, programming robot manipulations, RoboCell, spatial cognition 1. INTRODUCTION One of the contemporary trends in education is an emphasis on learning in situations that mimic, to some degree, real life thinking and acting. This requires the use of learning environments in which students acquire knowledge through reflective practice in realistic situations. Students’ reflection-in-action commonly relates to creating spatial representations of objects (Scho¨n, 1987, p. 41); being depen- dent on visual information, it relies on the abilities of spatial per- ception, mental operation, and visualization. A number of educators have proposed computer environments for spatial training in mathematics, science, engineering, medicine and other subjects. (This trend is supported by cognitive scientists who have proposed that spatial ability can be developed through experi- ence and exercises (Lohman, 1988) and that computer technology can facilitate effective training of spatial skills in various contexts (Peruch et al., 2000). For example, an undergraduate Calculus II course (Travis and Lennon, 1997) included practice for students in three- dimensional representations using the MAPLE software environ- ment; this research indicated that the students performed on calculus International Journal of Computers for Mathematical Learning 9: 213–234, 2004. Ó 2004 Kluwer Academic Publishers. Printed in the Netherlands.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

IGOR M. VERNER
ROBOT MANIPULATIONS: A SYNERGY OF
VISUALIZATION, COMPUTATION AND ACTION
FOR SPATIAL INSTRUCTION
ABSTRACT. This article considers the use of a learning environment, RoboCell, where
manipulations of objects are performed by robot operations specified through the lear-
ner’s application of mathematical and spatial reasoning. A curriculum is proposed
relating to robot kinematics and point-to-point motion, rotation of objects, and robotic
assembly of spatial puzzles. Various instructional methods are supported by the RoboCell
robot system, such as interactive demonstrations, modeling, computer simulations and
robot operations, providing diverse activities in spatial perception, mental rotation and
visualization. Pre-course and post-course tests in two middle schools and a high school
indicated significant student progress in the tasks related to the categories of spatial ability
which were practiced in the course.
KEY WORDS: coordinate spaces and spatial operations, educational robotics, mechanical
design, programming robot manipulations, RoboCell, spatial cognition
1. INTRODUCTION
One of the contemporary trends in education is an emphasis onlearning in situations that mimic, to some degree, real life thinkingand acting. This requires the use of learning environments in whichstudents acquire knowledge through reflective practice in realisticsituations. Students’ reflection-in-action commonly relates to creatingspatial representations of objects (Schon, 1987, p. 41); being depen-dent on visual information, it relies on the abilities of spatial per-ception, mental operation, and visualization.
A number of educators have proposed computer environments forspatial training in mathematics, science, engineering, medicine andother subjects. (This trend is supported by cognitive scientists whohave proposed that spatial ability can be developed through experi-ence and exercises (Lohman, 1988) and that computer technology canfacilitate effective training of spatial skills in various contexts (Peruchet al., 2000). For example, an undergraduate Calculus II course(Travis and Lennon, 1997) included practice for students in three-dimensional representations using the MAPLE software environ-ment; this research indicated that the students performed on calculus
International Journal of Computers for Mathematical Learning 9: 213–234, 2004.
� 2004 Kluwer Academic Publishers. Printed in the Netherlands.
and spatial reasoning tests significantly better than their peers whohad studied a conventional Calculus course. Spatial instruction in acomputer lab has been included also in undergraduate engineeringgraphics courses (His et al., 1997; Sorby and Baartmans, 2000); as aresult of this change, significant improvement was observed in stu-dents’ achievements in the course and in their spatial reasoning andvisualization skills. Similar effects were observed in a high schoolchemistry course which included spatial training in a computerizedmolecular modeling learning environment (Barnea and Dori, 1999).
In many educational studies of spatial instruction, students havedealt with graphic representations of elementary functions and basicfigures, and have solved paper-and-pencil tests. Less attention hasbeen paid to spatial learning through physical practice, especiallywhere physical operations are aided by tools. The literature on thissubject (Tarr and Pinker, 1989; Schwartz and Holton, 2000) pointsout that imagery functions can help people to predict the tool-drivendisplacement of objects, and that tool-based practice can improvepeople’s visualization skills.
Reiner (1997) examined the interaction between imagery and ac-tion in secondary school students studying electromagnetism. Thelearners performed hands-on experiments in the field of electromag-netic radiation reception, and solved related physical problems. Itwas found that ‘‘the links that learners created between imageryconstructs and the hands-on, physically perceived mental constructs’’were central to the problem-solving.
Eisenberg (2002) has emphasized a central role for mathematicalexperience with physical objects in the development of mathematicalexpertise, and its important social and emotional effects. He claimsthat the combination of crafts and computation in which studentsoperate computer-controlled devices can provide particularly valu-able mathematical experiences.
Since the late 1960s Seymour Papert and colleagues at MIT havebeen developing environments and strategies of learning throughprogramming, originally using the Logo language. One of the earliest,and still popular, applications of Logo was writing programs tocontrol movements of the ‘‘floor turtle’’, a simple mechanical robot.In more recent years the LEGO/Logo environment (Papert, 1980;Resnick and Ocko, 1991) has been used in school and informaleducation worldwide. Abelson and diSessa (1980) proposed a cur-riculum in which mathematics and computation were studied in thecontext of operating turtle movements on the computer screen. The
IGOR M. VERNER214
authors point out that (p. xiv) ‘‘most important in this endeavor is theexpression of mathematical concepts in terms of constructive, processoriented formulations, which can often be more assimilable and morein tune with intuitive modes of thought than the axiomatic-deductiveformalisms in which these concepts are usually couched’’.
According to Papert’s theory of constructionism (Papert, 1991),learning processes happen most effectively when a learner is involvedin the creation of external and sharable artifacts and uses them as‘‘objects to think with’’ in order to explore, embody, and share ideasrelated to the topic of inquiry. This theory has been widely imple-mented in school projects in which student teams design, build andprogram robots to perform various tasks. Many of these projectshave used small computers embedded inside LEGO pieces (pro-grammable bricks) developed in the MIT Media lab (Resnick et al.,1996).
In Israel, positive experience of senior projects (grades 11–12) inrobotics in high schools (Verner et al., 1997; Verner and Hershko,2003) has motivated educators to introduce robotics environments inthe earlier grades as part of science and technology studies.
This article considers the use of a programmable robot manipu-lator system as a means for improving middle and high-school stu-dents’ spatial abilities. We propose a curriculum which introducesideas of coordinate spaces, combinations of spatial operations (suchas translations and rotations) and mechanical design in the context ofanalyzing and designing robot manipulations. In such activities, thelearner first designs (imaginary) movements of the robot spatialmechanism, verifies them through computer simulation, and obtainsphysical feedback on the design by watching the robot execute it.Implementation of versions of the curriculum in several classroomsituations indicates that these robot-based activities can significantlyimprove certain elements of students’ spatial reasoning.
2. THE ROBOCELL ENVIRONMENT
RoboCell is a technologically rich learning environment for designingvarious computer-aided manufacturing systems and processes(RoboCell, 1999; Scorbot-ER 4pc, 1999). It is used in the USA,Israel, and other countries for technology education at secondary andtertiary levels. For a mathematics educator, the experiences offeredby RoboCell provide an extensive source for mathematical problems
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 215

and activities in a ‘real life’ context. Different components of theRoboCell system and various mathematical problems related to theirapplications are presented in Table I.
In this article we consider only one of the RoboCell devices, theinstructional robot manipulator ‘Scorbot’ (Scorbot-ER 4pc, 1999),and we focus on robot manipulations of parts placed on the work-table. A mechanical arm of the Scorbot is presented schematically inFigure 1. It is actually a chain of joined links mounted on a base, witha gripper as the end-effector. Each joint is equipped with a motorwhich provides rotation of the link (i.e., the one following the joint)around its axis.
Each rotation is independent from the others, and forms one de-gree of freedom. So the mechanical arm in Figure 1A has five degreesof freedom: rotation of the base, the shoulder and the elbow, as wellas pitch and roll of the gripper.
Any position of the mechanical arm in the workspace is uniquelydetermined by five angle coordinates, representing the amount ofrotation in each of the five joints. However, in planning robotmanipulations, an equivalent five coordinate system is generally morepractical. In this equivalent system the five coordinates used tospecify the position and orientation of the arm are the Cartesiancoordinates (X, Y, Z) of the gripper end-point in the workspace (see
TABLE I
RoboCell components and applied problems
RoboCell devices Applied problems
Robot-manipulators, computer-controlled
milling and welding machines
Geometrical design of trajectories and
kinematics of a robot gripper,
milling cutter, and welding electrode
Conveyor belts, sensors, storage
and other peripheral devices
controlled by machine controllers
Discrete logic, combinatorics,
and data analysis of machine control
Work tables, parts and other
functional objects for handling
production processes in RoboCell
Calculating dimensions, and defining
positions and orientations by means
of coordinates
Software for robot and machine
operation
Algorithm design for real-time processes
Software for designing simulated
environments and three dimension
animation of automatic
control processes
Algorithm design for computer graphics
and animation
IGOR M. VERNER216
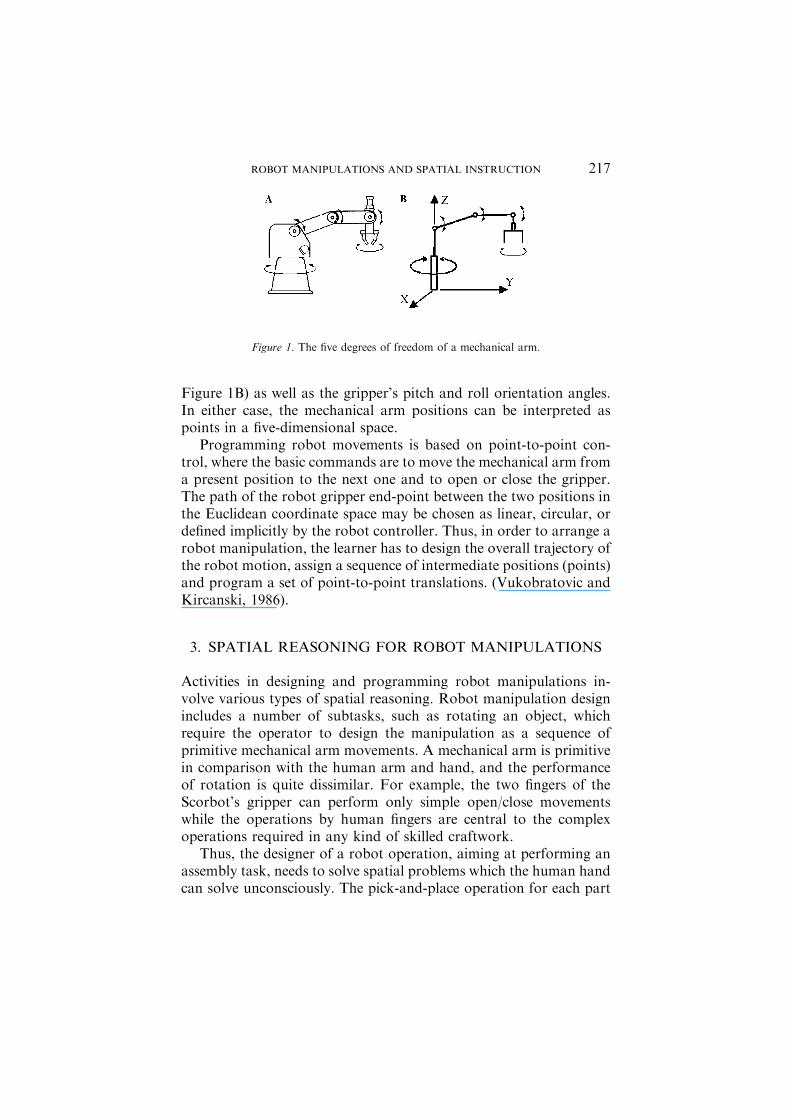
Figure 1B) as well as the gripper’s pitch and roll orientation angles.In either case, the mechanical arm positions can be interpreted aspoints in a five-dimensional space.
Programming robot movements is based on point-to-point con-trol, where the basic commands are to move the mechanical arm froma present position to the next one and to open or close the gripper.The path of the robot gripper end-point between the two positions inthe Euclidean coordinate space may be chosen as linear, circular, ordefined implicitly by the robot controller. Thus, in order to arrange arobot manipulation, the learner has to design the overall trajectory ofthe robot motion, assign a sequence of intermediate positions (points)and program a set of point-to-point translations. (Vukobratovic andKircanski, 1986).
3. SPATIAL REASONING FOR ROBOT MANIPULATIONS
Activities in designing and programming robot manipulations in-volve various types of spatial reasoning. Robot manipulation designincludes a number of subtasks, such as rotating an object, whichrequire the operator to design the manipulation as a sequence ofprimitive mechanical arm movements. A mechanical arm is primitivein comparison with the human arm and hand, and the performanceof rotation is quite dissimilar. For example, the two fingers of theScorbot’s gripper can perform only simple open/close movementswhile the operations by human fingers are central to the complexoperations required in any kind of skilled craftwork.
Thus, the designer of a robot operation, aiming at performing anassembly task, needs to solve spatial problems which the human handcan solve unconsciously. The pick-and-place operation for each part
Figure 1. The five degrees of freedom of a mechanical arm.
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 217
of an assembly has to be designed in a way that is executable by themechanical arm, without, of course, disturbing the stability of theentire set-up.
Generally, the designer must create a complete system (known as aworkcell) which integrates the robot with feeders, conveyors, sensorsand other machines, in order to provide automatic supply, trans-portation, and handling of parts in the production process. Designinga robot workcell includes determining the spatial locations of thevarious devices in the workspace and their interaction throughout theproduction process.
Designing robot manipulations involves spatial perception, spatialreasoning and visualization skills. Different spatial representations ofthe robot and the environment are required to perform analysis ofrobot movements, their visual verification and physical manipulationof objects in the robot workspace. The designer ‘‘thinks with a ro-bot’’, i.e., uses it as a frame of reference for the performance of spatialoperations. Goldin (1998, p. 151) notes a similar behavior in childrendealing with Turtle geometry: ‘‘The Logo computer language requiresthe interpretation of instructions in a way that makes reference to theturtle’s frame of reference, rather than a fixed background coordinatesystem. The child can encode this kinesthetically by imagining himselfor herself to be the turtle’’.
Observing students’ activities in manipulating robot movementsled us to the conclusion that they can be used for developing spatialskills. This has motivated the design of a curriculum which focuses onspatial learning through manipulating robot movements. The learn-ing strategy realized in the curriculum refers to four aspects ofstudying robot manipulations: robot kinematics and ‘point-to-point’motion, rotation of objects, robotic assembly, and design of work-cells. In the following sections we first describe the curriculum, andthen we present some results from pilot teaching of the curriculum tovarious groups of students.
4. MECHANICAL ARM KINEMATICS
The basic spatial task of point-to-point motion control is todetermine the various positions of the mechanical arm and to de-scribe them analytically by means of coordinates. The students startby studying the structure of the mechanical arm, the stepper motor,and driving rotations in joints. Then, the three-dimensional system
IGOR M. VERNER218
of Cartesian coordinates is introduced. The students practicedetermining coordinates of various points in the robot’s workspaceand their graphical representation. Our teaching experience inschools shows that students can properly grasp the concept of three-dimensional coordinates through the robotics curriculum, althoughit often precedes the study of this concept in the mathematicscourse.
The next step is for students to study the basics of kinematics ofmechanisms. The concepts of kinematic pairs, degrees of freedom,crank and articulated mechanisms are considered. The students alsopractice analysis and synthesis of mechanical linkages, and definetheir positions by multidimensional coordinates.
The students then learn robot control commands for defining themechanical arm positions using coordinates, and practice program-ming pick-and-place manipulations with block parts in simulated andreal environments. A sheet of squared paper, covered by transparentperspex and fixed on the work-plane, serves for physical measurementof XY coordinates.
Some of the learning exercises have been reformulated from spa-tial IQ tests (Eliot and Smith, 1983) concerning identification, inci-dence, and adjacency of puzzle pieces, and other spatial tasks. Thestudents are asked to assemble puzzles presented in the test picturesby means of robot operations.
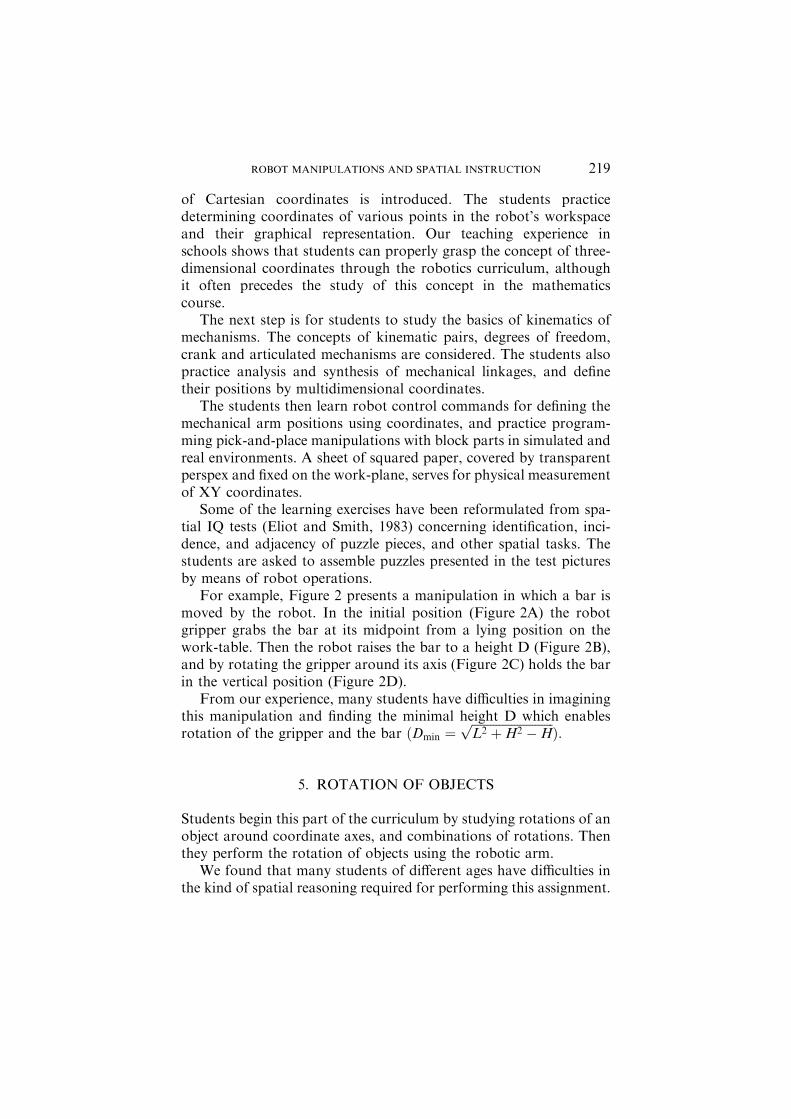
For example, Figure 2 presents a manipulation in which a bar ismoved by the robot. In the initial position (Figure 2A) the robotgripper grabs the bar at its midpoint from a lying position on thework-table. Then the robot raises the bar to a height D (Figure 2B),and by rotating the gripper around its axis (Figure 2C) holds the barin the vertical position (Figure 2D).
From our experience, many students have difficulties in imaginingthis manipulation and finding the minimal height D which enablesrotation of the gripper and the bar ðDmin ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
L2 þH2 �Hp
Þ:
5. ROTATION OF OBJECTS
Students begin this part of the curriculum by studying rotations of anobject around coordinate axes, and combinations of rotations. Thenthey perform the rotation of objects using the robotic arm.
We found that many students of different ages have difficulties inthe kind of spatial reasoning required for performing this assignment.
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 219
Therefore, we developed a tutoring package to help students to planobject rotations.
Rotating an object through pick-and-place manipulation dependsonly on the orientation of the gripper in the initial and final positionsand not on the object’s shape. Hence, rotating objects by a robot canbe practiced on a simple object such as an oriented block.
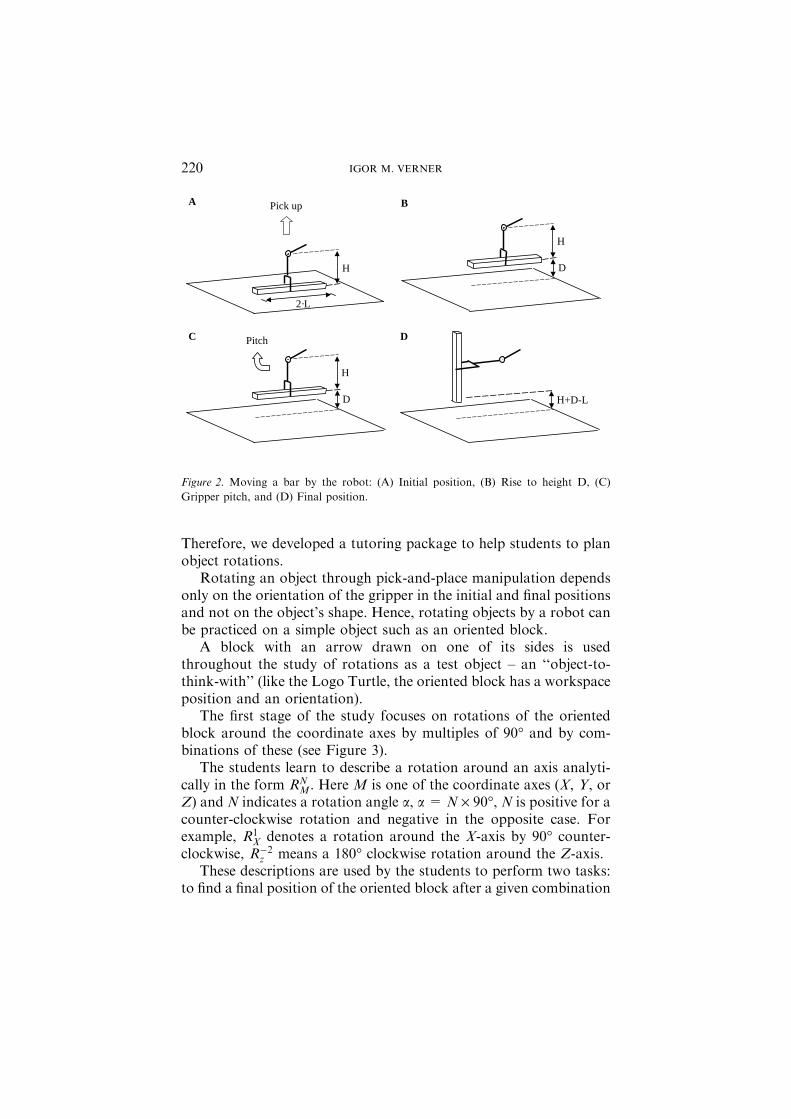
A block with an arrow drawn on one of its sides is usedthroughout the study of rotations as a test object – an ‘‘object-to-think-with’’ (like the Logo Turtle, the oriented block has a workspaceposition and an orientation).
The first stage of the study focuses on rotations of the orientedblock around the coordinate axes by multiples of 90� and by com-binations of these (see Figure 3).
The students learn to describe a rotation around an axis analyti-cally in the form RN
M. Here M is one of the coordinate axes (X, Y, orZ) and N indicates a rotation angle a, a = N · 90�, N is positive for acounter-clockwise rotation and negative in the opposite case. Forexample, R1
X denotes a rotation around the X-axis by 90� counter-clockwise, R�2
z means a 180� clockwise rotation around the Z-axis.These descriptions are used by the students to perform two tasks:
to find a final position of the oriented block after a given combination
2·L
H
Pick up
H
D
Pitch
H
D H+D-L
A B
C D
Figure 2. Moving a bar by the robot: (A) Initial position, (B) Rise to height D, (C)
Gripper pitch, and (D) Final position.
IGOR M. VERNER220
of rotations, and to find a combination of rotations which transformsa block from a given initial to a given final position.
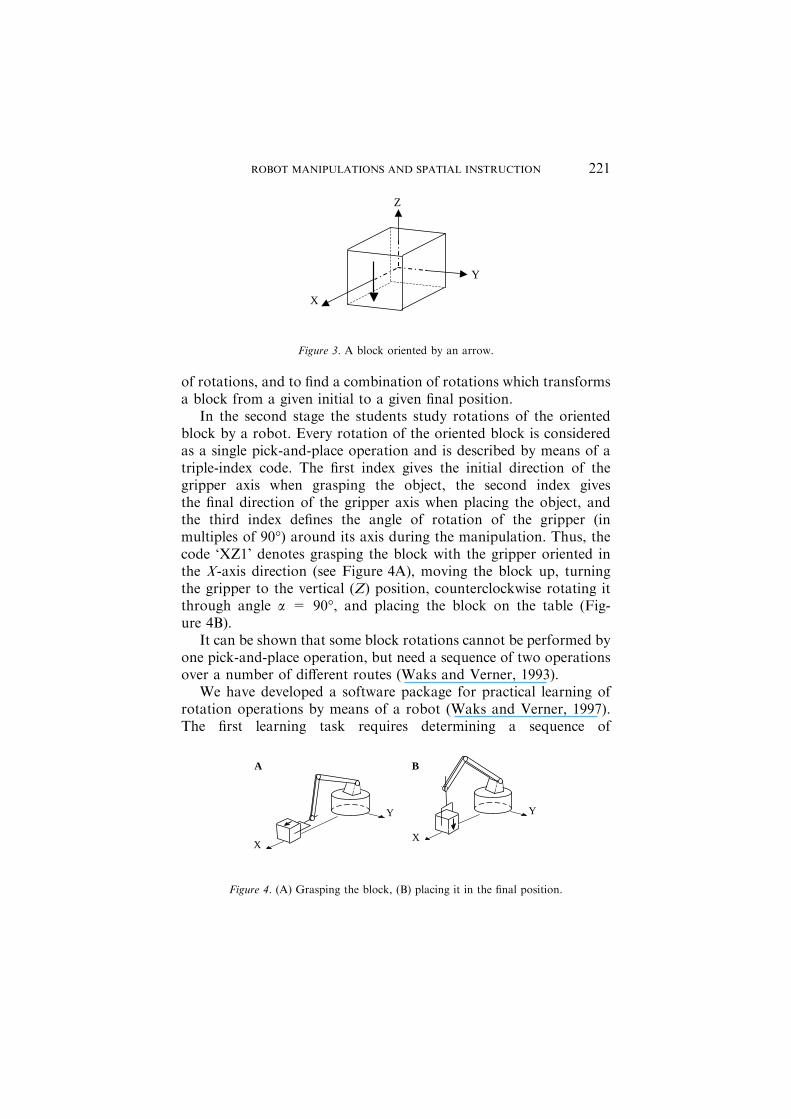
In the second stage the students study rotations of the orientedblock by a robot. Every rotation of the oriented block is consideredas a single pick-and-place operation and is described by means of atriple-index code. The first index gives the initial direction of thegripper axis when grasping the object, the second index givesthe final direction of the gripper axis when placing the object, andthe third index defines the angle of rotation of the gripper (inmultiples of 90�) around its axis during the manipulation. Thus, thecode ‘XZ1’ denotes grasping the block with the gripper oriented inthe X-axis direction (see Figure 4A), moving the block up, turningthe gripper to the vertical (Z) position, counterclockwise rotating itthrough angle a = 90�, and placing the block on the table (Fig-ure 4B).
It can be shown that some block rotations cannot be performed byone pick-and-place operation, but need a sequence of two operationsover a number of different routes (Waks and Verner, 1993).
We have developed a software package for practical learning ofrotation operations by means of a robot (Waks and Verner, 1997).The first learning task requires determining a sequence of
X
Y
Z
Figure 3. A block oriented by an arrow.
BA
X
YY
X
Figure 4. (A) Grasping the block, (B) placing it in the final position.
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 221

pick-and-place operation to transfer the oriented block from giveninitial to final positions. To carry out this task, the student choosesthe function ‘‘robot planning’’ from the menu. At the beginning, all24 possible positions of the oriented block are displayed on thescreen. The student selects an initial and a final position. The pro-gram presents all the possible robot operations for executing the task,showing the positions of the block and gripper as well as the codes ofthe operations. The learner examines all the routes and must find theone with the fewest operations for the task.
When the planning is completed, the learner turns to the secondtask, programming the operation. This includes defining by a controllanguage a sequence of intermediate positions of the mechanical arm,and a sequence of commands for moving the arm from one positionto another. Using the package, the learner verifies the program in thegraphic simulation mode and then runs it, so that the task is carriedout by the robot.
From our experience, the codes help students to formulate andexamine their mental operations, while the oriented block helps themvisualize their solutions. When writing robot control programs manystudents use hand movements to interpret codes and simulate oper-ations of the mechanical arm. The codes also provide an effective wayof studying rotations for students with a limited mathematical andtechnical background.
After practicing rotations of the oriented block, the study con-tinues with more advanced objects. Learners apply RoboCell to therotation of blocks with drawings on their faces, and to complex threedimension shapes. The tasks dealing with blocks with drawings aresimilar to those used in mental rotation tests (Eliot and Smith, 1983)but are related to the robot environment. The learners make blocksand other objects, create their three dimension models in RoboCelland perform rotations in real and simulated environments. Whenplanning a rotation of a complex shape the learners (1) imagine anoriented block within the shape in its initial position and the changeof the block’s direction to achieve the final position, (2) create asequence of robot operations to rotate the block, and (3) definepositions and movements of the mechanical arm for rotating thecomplex shape.
Figure 5 shows a fragment of the rotation manipulation of a blockperformed in the simulation mode. A cylindrical pallet in the figure isused for pick-and-place operations when the gripper axis is orientedhorizontally.
IGOR M. VERNER222

6. ROBOTIC ASSEMBLY OF SOMA PUZZLES
A Soma Cube puzzle is a dissection of a 3 · 3 · 3 cube into sevenblock parts (Coffin, 1991), as shown in Figure 6A. Soma puzzlesconsist of identical block elements which can be connected togetheralong their faces. Soma puzzles are highly suitable for assembly by amechanical arm and they allow students a wide spectrum of problem-solving activities. The Soma puzzle assignment that we have used wasto instruct the robot to assemble a given shape from a given set ofSoma parts.
In the first stage of the assignment the learner examines the pos-sibilities of assembling the setup. He/she examines various groups ofparts in their different orientations in order to find (if they exist)arrangements that will compose the given setup. Then, for each of thearrangements, the learner checks if it can be assembled by the robot.
A limitation of robotic assembly, as opposed to manual assembly,is that the gripper in its horizontal position can only move in a cir-cular path and so cannot maintain a parallel orientation of the parts.Therefore the robot must place the parts mainly through verticalrather than horizontal movements. A setup shown in Figure 6B canbe assembled by the robot, while another setup (Figure 6C) isimpossible. Indeed, part 1 can be placed in the setup through a top-to-bottom robot movement only after part 2, which cannot be placed
Figure 5. Rotation of a block in the simulation mode.
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 223
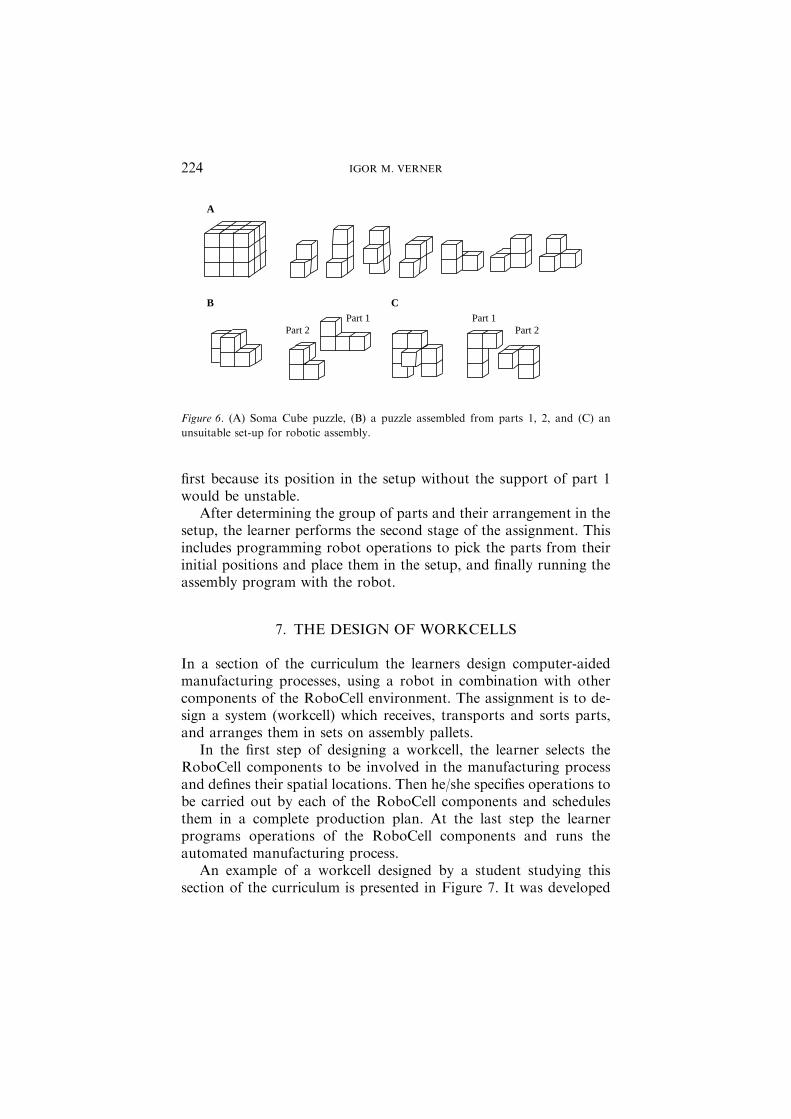
first because its position in the setup without the support of part 1would be unstable.
After determining the group of parts and their arrangement in thesetup, the learner performs the second stage of the assignment. Thisincludes programming robot operations to pick the parts from theirinitial positions and place them in the setup, and finally running theassembly program with the robot.
7. THE DESIGN OF WORKCELLS
In a section of the curriculum the learners design computer-aidedmanufacturing processes, using a robot in combination with othercomponents of the RoboCell environment. The assignment is to de-sign a system (workcell) which receives, transports and sorts parts,and arranges them in sets on assembly pallets.
In the first step of designing a workcell, the learner selects theRoboCell components to be involved in the manufacturing processand defines their spatial locations. Then he/she specifies operations tobe carried out by each of the RoboCell components and schedulesthem in a complete production plan. At the last step the learnerprograms operations of the RoboCell components and runs theautomated manufacturing process.
An example of a workcell designed by a student studying thissection of the curriculum is presented in Figure 7. It was developed
A
B C
Part 2Part 1
Part 2Part 1
Figure 6. (A) Soma Cube puzzle, (B) a puzzle assembled from parts 1, 2, and (C) an
unsuitable set-up for robotic assembly.
IGOR M. VERNER224
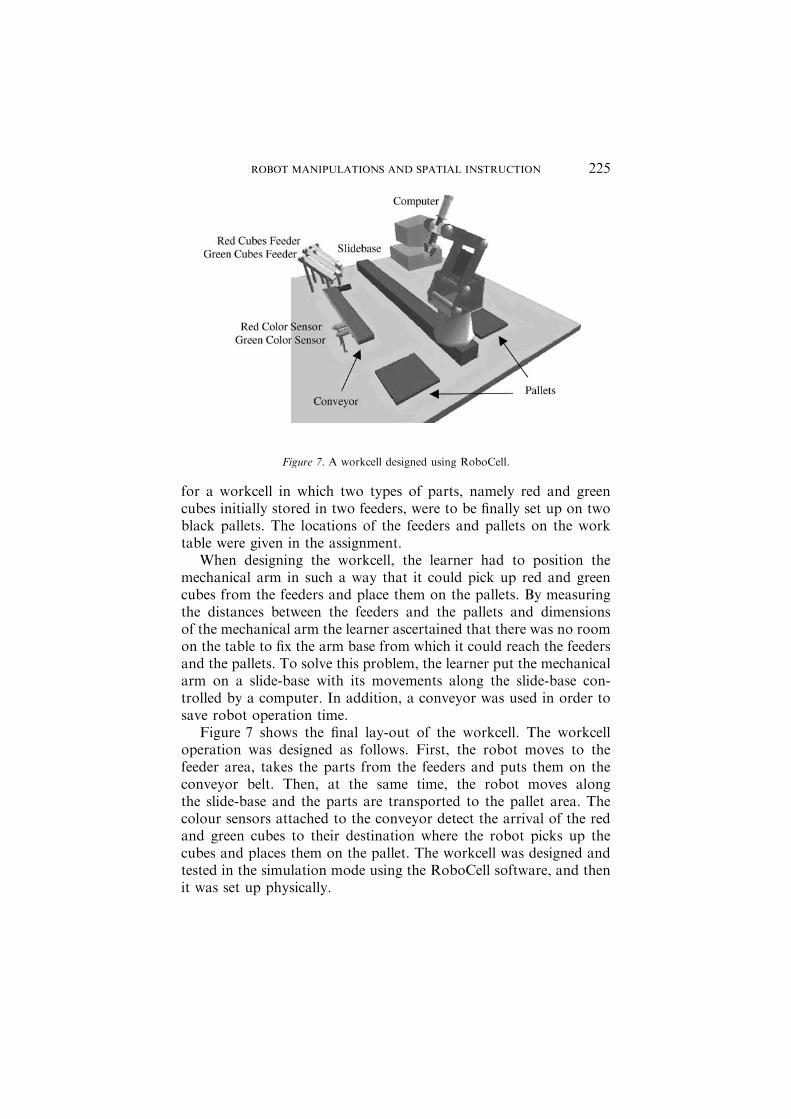
for a workcell in which two types of parts, namely red and greencubes initially stored in two feeders, were to be finally set up on twoblack pallets. The locations of the feeders and pallets on the worktable were given in the assignment.
When designing the workcell, the learner had to position themechanical arm in such a way that it could pick up red and greencubes from the feeders and place them on the pallets. By measuringthe distances between the feeders and the pallets and dimensionsof the mechanical arm the learner ascertained that there was no roomon the table to fix the arm base from which it could reach the feedersand the pallets. To solve this problem, the learner put the mechanicalarm on a slide-base with its movements along the slide-base con-trolled by a computer. In addition, a conveyor was used in order tosave robot operation time.
Figure 7 shows the final lay-out of the workcell. The workcelloperation was designed as follows. First, the robot moves to thefeeder area, takes the parts from the feeders and puts them on theconveyor belt. Then, at the same time, the robot moves alongthe slide-base and the parts are transported to the pallet area. Thecolour sensors attached to the conveyor detect the arrival of the redand green cubes to their destination where the robot picks up thecubes and places them on the pallet. The workcell was designed andtested in the simulation mode using the RoboCell software, and thenit was set up physically.
Figure 7. A workcell designed using RoboCell.
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 225

8. LEARNING OUTCOMES
A programme of pilot teaching based on the curriculum and learningmaterials we have developed has been carried out, involving lecturesand workshops for different groups of learners: junior high and se-nior high school students, pre-service and in-service teachers,undergraduate students and aircraft technicians. The high school andcollege student pilots were guided by the author. Below we willconsider some of these different cases, and we will consider the stu-dents’ progress in spatial ability as measured by pre-course and post-course spatial tests.
8.1. ORT Akko Middle School
A twelve-hour course ‘‘Principles of Robot Spatial Motion’’ wasdelivered to seventh grade students. The learning population con-sisted of 61 students divided into four groups. The mechanical armkinematics section of the curriculum was studied. The learningpractice included defining spatial positions of a three dimension ob-ject (a cube) and the robot (Scorbot) by means of coordinates, andprogramming robot pick-and-place manipulations.
Pre-course and post-course spatial tests comprised 12 paper-and-pencil tasks. Five tasks related to perception of a block structure:three tasks on counting blocks and two tasks on block neighbors(Eliot and Smith, 1983, pp. 253, 263). Another five tasks requiredmental rotations: two tasks on comparing cubes with drawings, andthree more tasks on comparing block structures, comparing spatialparts, and determining a letter on a cube’s face (Eliot and Smith,1983, pp. 322, 297, 319). There were also two visualization tasks –determining parts and their locations to compose a flat figure or ablock structure (Eliot and Smith, 1983, pp. 402–403).
Test results indicated some improvements in performing spatialtasks (see Table II). The mean score rose from 46.5% in the pre-course test to 62.4% in the post-course test. A t-test indicates sig-nificant improvement in the perception and visualization tasks, inwhich scores rose from 39.8% to 65.3%, and from 35.7% to 62.2%(in both cases p < 0.001). Improvement in the scores for the mentalrotation tasks from 53.1% to 61.2% was found to be not significant(p = 0.0603). A possible reason for the lower performance inmental rotations is that they were not directly addressed in thecourse.
IGOR M. VERNER226
8.2. Yafia Nazareth Arab Middle School
A fourteen-hour course was given to 67 eighth graders divided intotwo groups. It included the study of mechanical arm kinematicssimilar to that in the ORT Akko course. In addition, the studentslearned the theory of rotations of an object (cube) around coordinateaxes. They observed demonstrations of rotation operations by therobot but did not practice them.
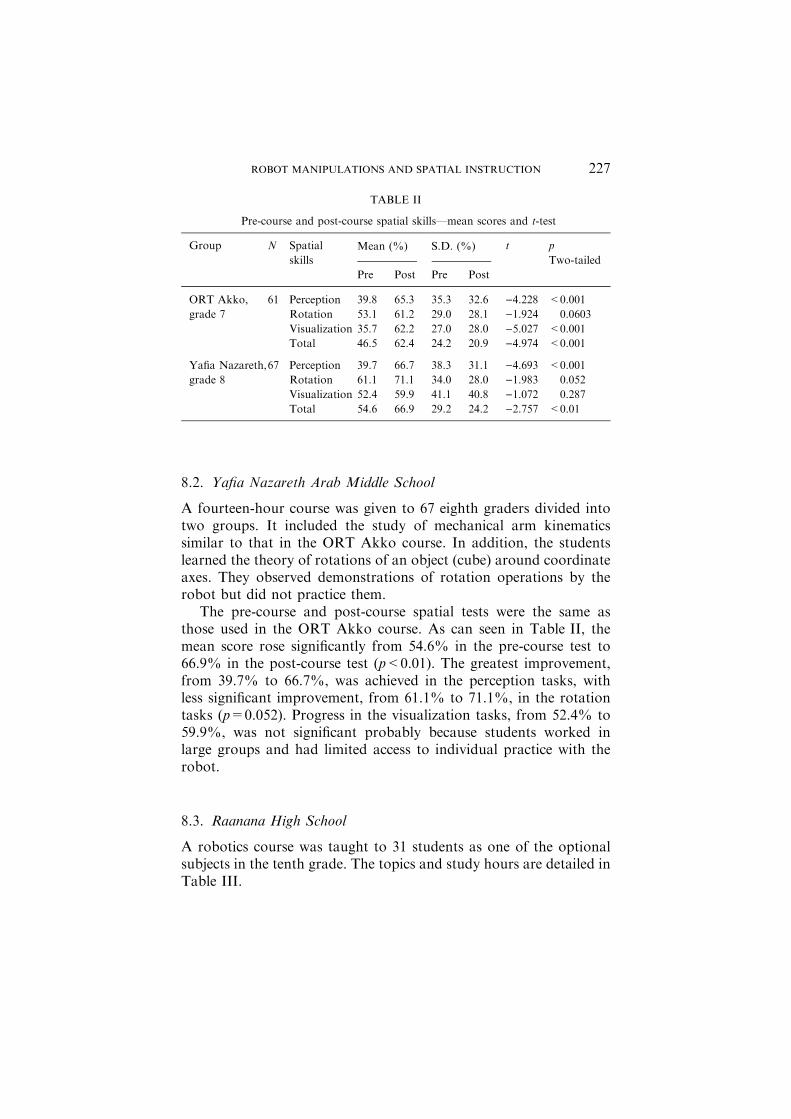
The pre-course and post-course spatial tests were the same asthose used in the ORT Akko course. As can seen in Table II, themean score rose significantly from 54.6% in the pre-course test to66.9% in the post-course test (p<0.01). The greatest improvement,from 39.7% to 66.7%, was achieved in the perception tasks, withless significant improvement, from 61.1% to 71.1%, in the rotationtasks (p=0.052). Progress in the visualization tasks, from 52.4% to59.9%, was not significant probably because students worked inlarge groups and had limited access to individual practice with therobot.
8.3. Raanana High School
A robotics course was taught to 31 students as one of the optionalsubjects in the tenth grade. The topics and study hours are detailed inTable III.
TABLE II
Pre-course and post-course spatial skills—mean scores and t-test
Group N Spatial
skills
Mean (%) S.D. (%) t p
Two-tailed
Pre Post Pre Post
ORT Akko, 61 Perception 39.8 65.3 35.3 32.6 )4.228 <0.001
grade 7 Rotation 53.1 61.2 29.0 28.1 )1.924 0.0603
Visualization 35.7 62.2 27.0 28.0 )5.027 <0.001
Total 46.5 62.4 24.2 20.9 )4.974 <0.001
Yafia Nazareth,67 Perception 39.7 66.7 38.3 31.1 )4.693 <0.001
grade 8 Rotation 61.1 71.1 34.0 28.0 )1.983 0.052
Visualization 52.4 59.9 41.1 40.8 )1.072 0.287
Total 54.6 66.9 29.2 24.2 )2.757 <0.01
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 227
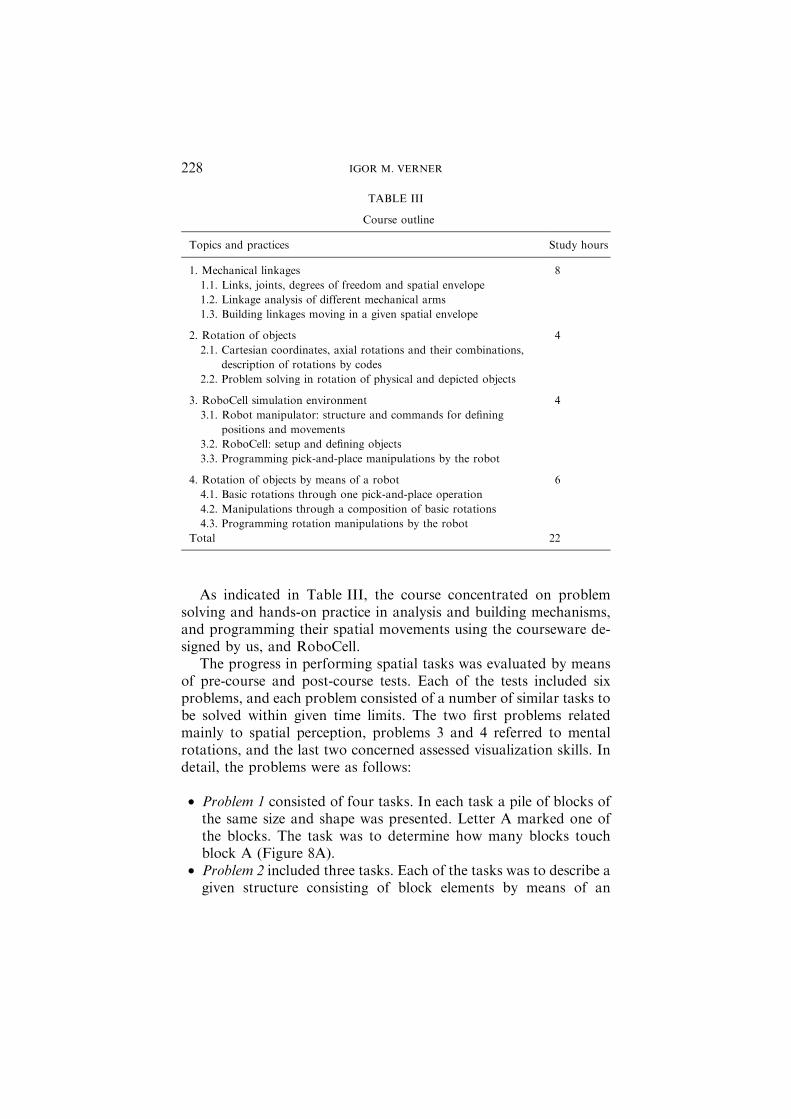
As indicated in Table III, the course concentrated on problemsolving and hands-on practice in analysis and building mechanisms,and programming their spatial movements using the courseware de-signed by us, and RoboCell.
The progress in performing spatial tasks was evaluated by meansof pre-course and post-course tests. Each of the tests included sixproblems, and each problem consisted of a number of similar tasks tobe solved within given time limits. The two first problems relatedmainly to spatial perception, problems 3 and 4 referred to mentalrotations, and the last two concerned assessed visualization skills. Indetail, the problems were as follows:
• Problem 1 consisted of four tasks. In each task a pile of blocks ofthe same size and shape was presented. Letter A marked one ofthe blocks. The task was to determine how many blocks touchblock A (Figure 8A).
• Problem 2 included three tasks. Each of the tasks was to describe agiven structure consisting of block elements by means of an
TABLE III
Course outline
Topics and practices Study hours
1. Mechanical linkages 8
1.1. Links, joints, degrees of freedom and spatial envelope
1.2. Linkage analysis of different mechanical arms
1.3. Building linkages moving in a given spatial envelope
2. Rotation of objects 4
2.1. Cartesian coordinates, axial rotations and their combinations,
description of rotations by codes
2.2. Problem solving in rotation of physical and depicted objects
3. RoboCell simulation environment 4
3.1. Robot manipulator: structure and commands for defining
positions and movements
3.2. RoboCell: setup and defining objects
3.3. Programming pick-and-place manipulations by the robot
4. Rotation of objects by means of a robot 6
4.1. Basic rotations through one pick-and-place operation
4.2. Manipulations through a composition of basic rotations
4.3. Programming rotation manipulations by the robot
Total 22
IGOR M. VERNER228
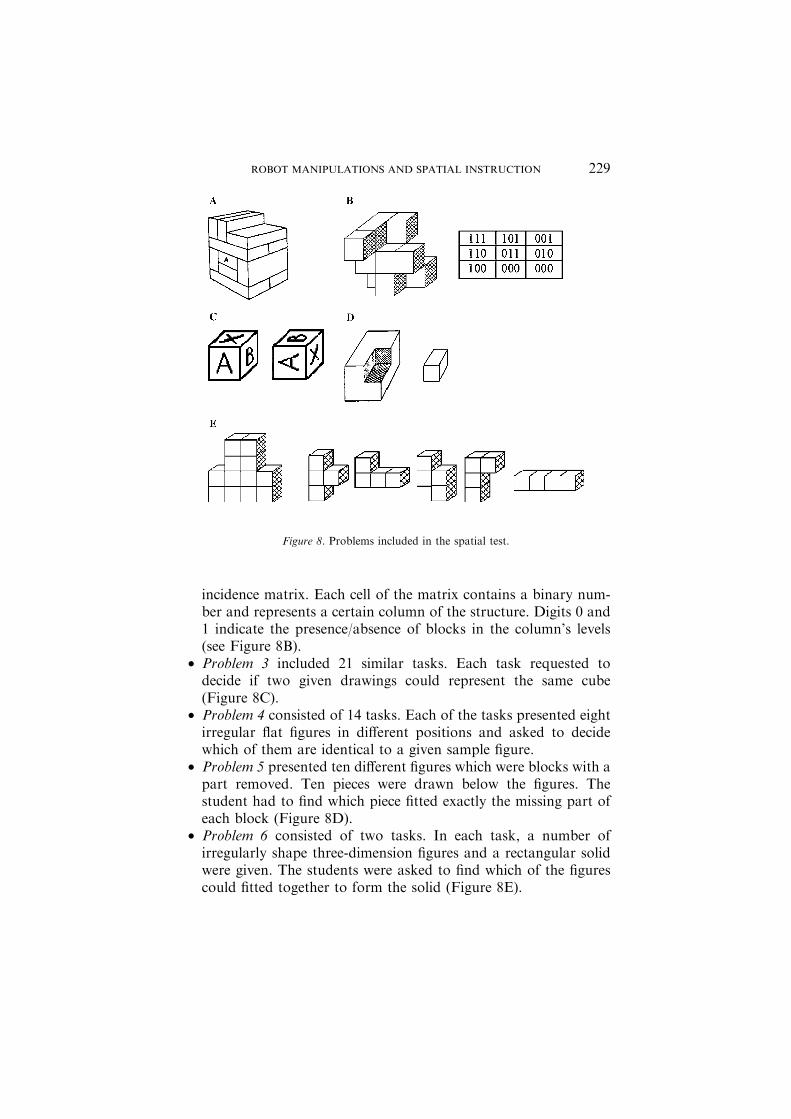
incidence matrix. Each cell of the matrix contains a binary num-ber and represents a certain column of the structure. Digits 0 and1 indicate the presence/absence of blocks in the column’s levels(see Figure 8B).
• Problem 3 included 21 similar tasks. Each task requested todecide if two given drawings could represent the same cube(Figure 8C).
• Problem 4 consisted of 14 tasks. Each of the tasks presented eightirregular flat figures in different positions and asked to decidewhich of them are identical to a given sample figure.
• Problem 5 presented ten different figures which were blocks with apart removed. Ten pieces were drawn below the figures. Thestudent had to find which piece fitted exactly the missing part ofeach block (Figure 8D).
• Problem 6 consisted of two tasks. In each task, a number ofirregularly shape three-dimension figures and a rectangular solidwere given. The students were asked to find which of the figurescould fitted together to form the solid (Figure 8E).
Figure 8. Problems included in the spatial test.
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 229
The pre-course and post-course tests indicate some progress of thestudents in performing the tasks (see Table IV).
The mean score rose significantly from 61.4% to 72.6%(p<0.001). The students performed the perception tasks better thanthe other tasks: 90.2% of them succeeded in problems 1 and 2 in thepre-course test. In the post-course test this percentage rose to 96.4%(p=0.055). Changes in scores for the rotation problems rose from41.5% to 49.5%, and in the visualization problems from 48.3 to62.9%; both changes were significant (in both cases p<0.03). Indi-vidual results of the students are presented in Figure 9. Each point(diamond shape) in the diagram presents the test results of one of thestudents (X and Y coordinates are his/her pre-course test and post-course test mean scores).
TABLE IV
Pre-course and post-course tests—a tenth grade group (N=31)
Spatial skills Mean (%) S.D. (%) t p Two-tailed
Pre Post Pre Post
Perception 90.2 96.4 19.6 8.9 )1.655 0.055
Rotation 41.5 49.5 15.8 22.4 )1.850 <0.05
Visualization 48.3 62.9 26.9 30.5 )2.233 <0.05
Total 61.4 72.6 13.8 13.7 )4.099 <0.001
0
20
40
60
80
100
0 20 40 60 80 100
Pretest score
Pos
ttest
sco
re
Figure 9. Individual student results in the tests.
IGOR M. VERNER230
As shown by the figure, most of the diamonds are located abovethe dotted diagonal, meaning that the majority of students (60.7%)performed on the post-test better than the pre-test. All the marks areto the right of the vertical dotted line and above the horizontal line,indicating that the lowest score of the students rose from 43.2% to48.5%.
8.4. Summary of the Pilots
To summarize, our experience of teaching the subject in the threeschools described above indicated noticeable improvements in per-forming spatial reasoning tasks.
Besides the pilots in schools, the robotics curriculum was includedin the courses ‘Teaching Methods for Design and Manufacturing’and ‘Technological Aspects of Teaching Science and Technology inJunior High Schools’, delivered by the author as part of the teachertraining program in the Department of Education in Technology andScience at the Technion. One of the teachers in that course imple-mented the curriculum in a (non-privileged) boarding high school aspart of the technology course in the eleventh grade. His reflection onthe impact of the curriculum on the students was as follows: ‘‘Thecurriculum enhanced students’ thinking and aptitude in drawing andcomputer-aided design. The robotics assignments triggered students’motivation and interest to succeed in the spatial tests. We noticed theimprovement in students’ capability of operating the robot and inspatial skills. This improvement contributed to raising the students’self-esteem’’.
9. CONCLUSIONS
This article has considered the application of spatial thinking in anenvironment where manipulations of objects are carried out by robotoperations. The instructional manipulator, controlled by means ofcomputer commands, serves as a tool to displace objects in theworkspace. Performing robot tasks such as assembling puzzles in-volves the learner in mathematical and technological problem solvingwhich includes practice in spatial imagery. This involves creation andexamination of different spatial representations required for theanalysis of robot movements, their visual verification through simu-lation, and physical manipulation of objects in the robot workspace.
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 231

We have developed a robotics curriculum which focuses on spatiallearning through practice in kinematics of spatial mechanisms, anddesigning and programming robot manipulations (robot kinematicsand point-to-point motion, rotation of objects, and robotic assemblyof puzzles). The curriculum combines various learning activities suchas interactive demonstrations, mathematical and mechanical model-ing, programming, operating robots and computer simulations. Thisprovides the learners with diverse practice in spatial perception,mental manipulation (for example, rotations) and visualization.
Our teaching experience supports the conclusion that the pro-posed curriculum can provide improvement in students’ perfor-mance of spatial reasoning tasks. Pilot courses were delivered in twomiddle schools and a high school; progress in spatial learning wasmeasured by pre-course and post-course spatial reasoning testswhich included perception, mental rotation, and visualization tasks.The tests indicated significant student progress in those tasks relatedto the categories of spatial ability which were directly practiced inthe course.
A detailed statistical and qualitative analysis of changes in spatialperformance brought about by the proposed curriculum is recom-mended for future research. The following aspects of spatial learningin the curriculum should be studied: the interaction between com-putation, visualization and action; the relations between learningpractice in physical and virtual environments, and the effect of samplecharacteristics (such as age, gender, learning style etc.) on learningachievements.
ACKNOWLEDGEMENTS
The author thanks Prof. Uri Leron and Mrs E. Wejntrob for theirconstructive comments, Eyal Hershko who teaches robotics in Raa-nana High School, and Eshed Robotec Co. which put the RoboCellsystem at our disposal in order to implement the course.
REFERENCES
Abelson, H. and diSessa, A. (1980). Turtle Geometry. Cambridge: MIT Press.
Barnea, N. and Dori, Y. (1999). High-school chemistry students’ performance and gender
differences in a computerized molecular modeling learning environment. Journal of
Science Education and Technology 8(4): 257–271.
IGOR M. VERNER232

Coffin, S. (1991). The Puzzling World of Polyhedral Dissections. Oxford: Oxford Uni-
versity Press.
Eisenberg, M. (2002). Output devices, computation, and the future of mathematical
crafts. International Journal of Computers for Mathematical Learning 7(1): 1–44.
Eliot, J. and Smith, I. (1983). An International Directory of Spatial Tests. Windsor:
NFER-Nelson.
Goldin, G. (1998). Representational systems, learning, and problem solving in mathe-
matics. Journal of Mathematical Behavior 17(2): 137–165.
Hsi, S., Linn, M. and Bell, J. (1997). The role of spatial reasoning and the design of spatial
instruction. Journal of Engineering Education 86(2): 151–158.
Lohman, D.F. (1988). Spatial abilities as traits, processes, and knowledge. In R.J.
Sternberg (Ed.), Advances in the Psychology of Human Intelligence, (Vol. 4, pp.
181–248). Hillsdale, NJ: Lawrence Erlbaum Associates.
Papert, S. (1980). Mindstorms. Children, Computers, and Powerful Ideas. NY: Basic
Books.
Papert, S. (1991). Situating Constructionism. In I. Harel and S. Papert (Eds), Construc-
tionism. Norwood, NJ: Ablex Publishing.
Peruch, P., Belingard, L. and Thinus-Blanc, C. (2000). Transfer of spatial knowledge from
virtual to real environments. In C. Freksa, W. Brauer, C. Habel and K. Wender (Eds),
Spatial Cognition II. Lecture Notes in Artificial Intelligence, (number 1849, pp.
253–264). Berlin-Heidelberg: Springer-Verlag.
Reiner, M. (1997). A learning environment for mental visualization in electromagnetism.
International Journal of Computers for Mathematical Learning 2(2): 125–154.
Resnick, M. and Ocko, S. (1991). LEGO/Logo: Learning through and about design. In
I. Harel and S. Papert (Eds.), Constructionism. Norwood, NJ: Ablex Publishing.
Resnick, M., Martin, F., Sargent, R. and Silverman, B. (1996). Programmable bricks: toys
to think with. IBM Systems Journal 35(3): 443–452.
RoboCell 3.0. User’s Manual (1999). Nashua, NH: Eshed Robotec.
Schon, D. (1987). Educating the Reflective Practitioner. San Francisco, CA: Jossey-Bass.
Schwartz, D. and Holton, D. (2000). Tool use and the effect of action on the imagination.
Journal of Experimental Psychology: Learning, Memory, and Cognition 26(6):
1655–1665.
Scorbot-ER 4pc. User’s Manual (1999). Nashua, NH: Eshed Robotec.
Sorby, S. and Baartmans, B. (2000). The development and assessment of a course for
enhancing the 3-D spatial visualization skills of first year engineering students. Journal
of Engineering Education 89(3): 301–307.
Tarr, M. and Pinker, S. (1989). Mental rotation and orientation dependence in shape
recognition. Cognitive Psychology 21: 233–282.
Travis, B. and Lennon, E. (1997). Spatial skills and computer-enhanced instruction in
calculus. The Journal of Computers in Mathematics and Science Teaching 16(4):
467–475.
Verner, I., Waks, S. and Kolberg, E. (1997). Upgrading technology towards the status of
high school matriculation subject: A case study. Journal of Technology Education 9(1):
64–75.
Verner, I. and Hershko, E. (2003). School graduation project in robot design: A case
study of team learning experiences and outcomes. Journal of Technology Education
14(2): 40–55.
ROBOT MANIPULATIONS AND SPATIAL INSTRUCTION 233

Vukobratovic, M. and Kircanski, M. (1986). Kinematics and Trajectory Synthesis of
Manipulation Robots. Berlin: Springer.
Waks, S. and Verner, I. (1993). Positioning issues in the study of robotic manipulations.
International Journal of Engineering Education 9(3): 223–230.
Waks, S. and Verner, I. (1997). Spatial vision development through manipulating robot
movements. European Journal of Engineering Education 22(1): 35–43.
Department of Education in Technology and Science,Technion – Israel Institute of Technology,Haifa 32000, ISRAELE-mail: [email protected]
IGOR M. VERNER234
Related Documents











