An Introduction to RoboCup By: Noureen Mehmood Farkhanda Kiran

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

An Introduction to RoboCup
By: Noureen MehmoodFarkhanda Kiran

Overview of RoboCup
The Robot World Cup Initiative
“By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team.”
A standard problem for AI research

Overview of RoboCup
Started in 1992 as the Robot J-League (Japan)
First games and conferences in 1997
Kasparov's Defeat.

Overview of RoboCup
After three months of Kasparov's defeat
In Japan, the International Joint Conference on Artificial Intelligence, 40 teams of robotics experts participated in the world's first Robotics Cup.
A team of fully autonomous humanoid robot soccer players shall win a soccer game, complying with the official rules of FIFA, against the winner of the most recent World Cup.

Overview of RoboCup
Dynamo Project, the world's first attempt at an autonomous robotic soccer team.
The first Robotics Cup in 1997, the competition has grown tremendously: at the 2013 RoboCup

Cont…
Soccer may be called "The Beautiful Game,"
The players as closer to "five year olds" than Ronaldo's
"It’s not just the soccer domain, it’s really thinking about artificial intelligence, robotics, and what they can do in a more general context."

•Robotic soccer helps scientists gain a better understanding of human intelligence:
•How we balance?
•How we see?
•How we process information?

SOCCER – A NEW TOY PROBLEM FOR AI
Environment dynamic
Sensor Readings non-symbolic
Control distributed
Physical Agent yes
Time Critical yes

The Field of Play
Rectangular field
Two goals and
field lines-5 cm wide
The longer outer field lines are called touch lines
the shorter outer field lines are called goal lines.

RoboCup Soccer
RoboCup Soccer is divided into the following leagues:
Simulation League
Small-size Robot League
Middle-size Robot League
Standard Platform League
Humanoid League
Simulation League
• Independently moving software players (agents) play soccer on a virtual field inside a computer
•There are sub leagues: 2D, 3D, 3D development and Mixed Reality (formerly called Visualization)


Small-size Robot League
•Small robots of no more than 18 cm in diameter play soccer with an orange golf ball in teams of up to 5 robots with the size of 6.5m x 4.5m.
•10-minute halves.

Middle-size Robot League
RoboCup Soccer Middle-Size more than 50 cm diameter play soccer in teams of up to 6 robots with an orange soccer ball on a field the size of 12x18 meters.
15-minute halves.
Robots can use wireless networking to communicate.


Standard Platform League
The robots operate fully autonomously, i.e. there is no external control, neither by humans nor by computers.
The Standard Platform League replaces the highly successful Four-Legged League. In the league all teams use identical (i.e. standard) robots.


BRocks, a team from Bogazici University in Istanbul, at the 2013
RoboCup.

Humanoid League
This league is autonomous humanoid robots play in matches as well as "Technical Challenges".
This league has two subcategories:
KidSize, 40-90 cm height
TeenSize, 80-140 cm height
AdultSize, 130-180 cm height

Sony Aibo (“Four -Legged”) League
Standard Platform League
The teams concentrate on software development
In 1999.


RoboCup Software Simulator
Royal Melborune Institute of Technology (RMIT) operates the RoboCup Practice Server simulator
Georgia Institute of Technology developed JavaSoccer, a Java-based simulator for real robot small-size league.

ClientClientClientClientClientClient
ClientClientClientClientClientClientServer
Soccer MonitorCoach Coach
Monitor(s) used to visualize the action and/or interrupt the game
Coaches (optional) to give guidance to teams
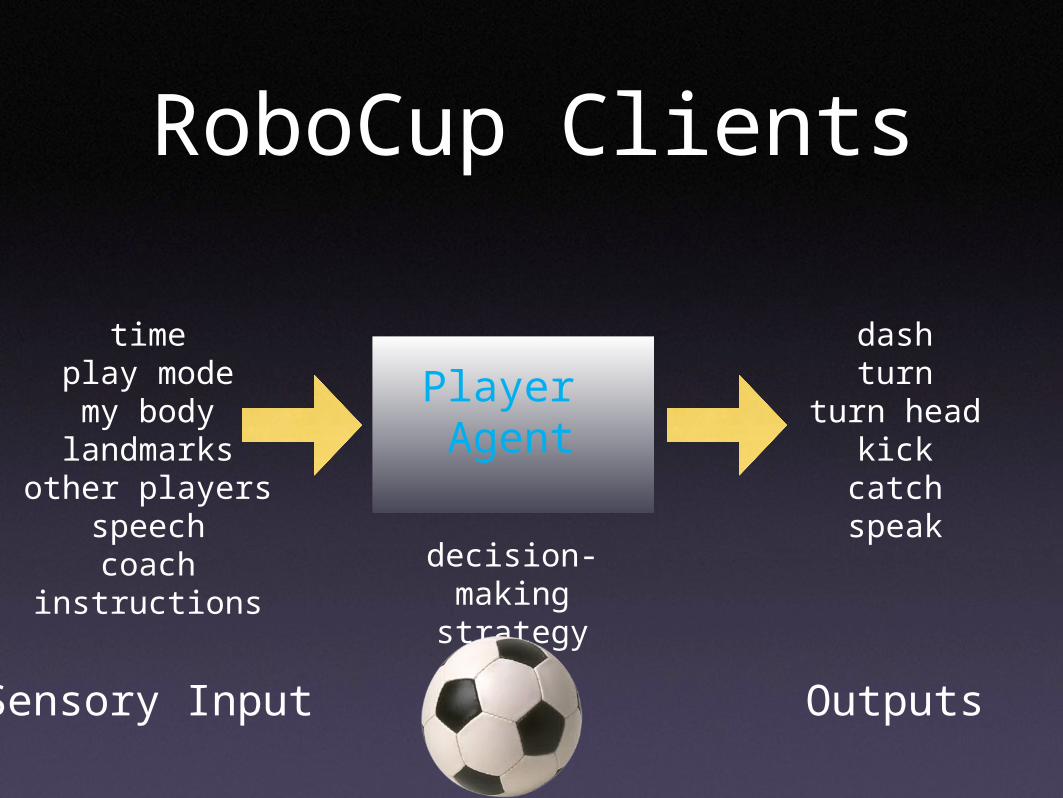
RoboCup Clients
Player Agent
timeplay modemy body
landmarksother players
speechcoach
instructions
dashturn
turn headkick
catchspeak
decision-makingstrategy
Sensory Input Outputs

Sensors
These consist of objects which include a sense method, as well as a name for a hash table key.Each is designed to determine the boolean outcome of a specific predicate, such as can-see-goal.
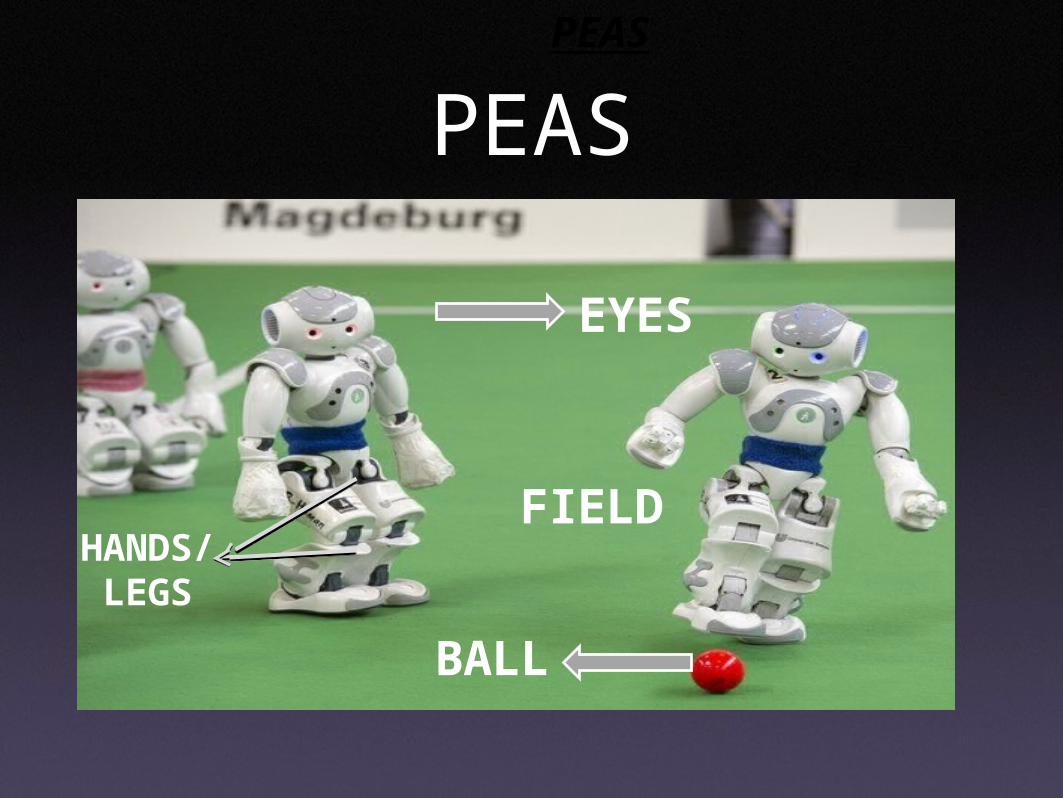
PEASPEAS
EYES
BALL
FIELDHANDS/
LEGS


THANK YOU
Related Documents










