‘07 ® iiia.udg.edu IIiA RESEARCH REPORT

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Campus de Montilivi, Edifici P417071 Girona (SPAIN)Tel. 972 418 495Fax 972 418 [email protected]
iiia.udg.edu
®
‘07
®
iiia.udg.edu
IIiARESEARCHREPORT

®
History and Objectives 04
History 04Objectives 04
Organisation and Management 05
Organisation 05Management 05
IIiA 2007 in figures 06
Financing 06Human resources 06
Research Groups 07
Broadband Communications and Distributed Systems (BCDS) 07Control Engineering and Intelligent Systems (eXiT) 08Geometry and Graphics Group (GGG) 09Modelling, Identification and Control Engineering Laboratory (MICELab) 10Computer Vision and Robotics (Vicorob) 11Laboratory of Graphics and Image (GILab) 12Agents Research Laboratory (ARLab) 13
Public-Funded Research Projects 14
EC (European Commission) financed projects 14International funding 18Ministry of Education and Science (MEC) 18Ministry of Industry, Tourism and Commerce 26Catalan Government - CERTAP PVPC 28Catalan Government XARTAP 29Institute of Biomedical Investigation of Girona (IDIBGI) 30
Technology Transfer 32
Patents 34
Education 35
Master Programs 35< European Joint Master in Environmental Process Control Engineering (EPCE) 35< Joint Masters in Computing 35< Master in Automatic Control and Computer Engineering 35< VIBOT - Erasmus Mundus Masters in Vision & Robotics 35
PhD Programs 36< Doctorate of the Official Postgraduate Programme in Technology 36< PhD Thesis 2007 36< Diploma of Advanced Studies 2007 36
Publications 37
Books or Book Chapters 37Publications in Journals 37Publications in Conferences 39
tableof contents
®

®
History and Objectives 04
History 04Objectives 04
Organisation and Management 05
Organisation 05Management 05
IIiA 2007 in figures 06
Financing 06Human resources 06
Research Groups 07
Broadband Communications and Distributed Systems (BCDS) 07Control Engineering and Intelligent Systems (eXiT) 08Geometry and Graphics Group (GGG) 09Modelling, Identification and Control Engineering Laboratory (MICELab) 10Computer Vision and Robotics (Vicorob) 11Laboratory of Graphics and Image (GILab) 12Agents Research Laboratory (ARLab) 13
Public-Funded Research Projects 14
EC (European Commission) financed projects 14International funding 18Ministry of Education and Science (MEC) 18Ministry of Industry, Tourism and Commerce 26Catalan Government - CERTAP PVPC 28Catalan Government XARTAP 29Institute of Biomedical Investigation of Girona (IDIBGI) 30
Technology Transfer 32
Patents 34
Education 35
Master Programs 35< European Joint Master in Environmental Process Control Engineering (EPCE) 35< Joint Masters in Computing 35< Master in Automatic Control and Computer Engineering 35< VIBOT - Erasmus Mundus Masters in Vision & Robotics 35
PhD Programs 36< Doctorate of the Official Postgraduate Programme in Technology 36< PhD Thesis 2007 36< Diploma of Advanced Studies 2007 36
Publications 37
Books or Book Chapters 37Publications in Journals 37Publications in Conferences 39
tableof contents
®
The Institute of Informatics and Applications (IIiA) is a researchinstitute of the University of Girona created in 1996. IIiA ishighly active in research, both basic and industry-oriented,as well as in technology transfer actions.
The IIiA currently has more than 140 members, includingover 50 doctors. Researchers run their activities in differentfields such as computer graphics, computer vision, robotics,telecommunications, automatics, control engineering, and
artificial intelligence. They are members of three departmentsof the University of Girona: the Department of ComputerArchitecture and Technology, the Department of ElectricalEngineering, Electronics and Automatics, and the Departmentof Informatics and Applied Mathematics.
Organisationand Management
The main purpose of the IIiA is to acquire an internationalreputation in its scientific and technical activity. This reputationhas its basis in the conception, design and implementationof R&D projects and technology transfer contracts.
These activities produce innovative results in all their phases,both in scientific and engineering terms. Moreover, theInstitute aims at contributing to the economic developmentand growth of its region industrial context in the InformationTechnologies sector.
The IIiA specific objectives are:
To promote research activities, technology transfer andspecialized teaching in the fields of InformationTechnologies and its applications.
To foster and coordinate interdisciplinary projects usingthe different areas of expertise of the institute members.
To encourage the development of pre-competitive projectsand its materialization in technology innovation contracts.
To motivate the participation of the University of Gironain consortiums that focus on research lines close to theones of its members. The Institute acts as the representa-tive of the University in such consortiums.
History
Objectives
The Council is the most important management body andit is composed of all the academic staff of the Institute.
The Director is the head of the Institute. It is elected afteran open selection process.
An Executive Commission represents the council and givesadvice to the Director in government tasks. It is formed bythe Director, the head of each research group, the academicsecretary and the research manager.
The Research Manager is responsible for the internaloperation of the Institute.
The Academic Secretary is in charge of writing the minutesof the Council and Executive Commission meetings andwrite certificates of the agreements reached on them.
Director: Dr. Josep Vehí
Head of ARLab: Dr. Josep Lluís de la Rosa
Head of BCDS: Dr. Josep Lluís Marzo
Head of eXiT: Dr. Joaquim Meléndez
Head of GGG: Prof. Dr. Xavier Pueyo / Dr. Joan AntoniSellarès
Head of GILab: Prof. Dr. Mateu Sbert
Head of MICE: Dr. Josep Vehí
Head of Vicorob: Dr. Jordi Freixenet
Technical Secretary: Mr. Xavier Manyer
Research Manager: Ms. Denisa Gibovic
Academic Secretary: Dr. Marc Carreras
The Secretariat of the Institute provides administrative supportto the Institute Members.
Assistants: Ms. Rosa Teixidor, Ms.Montserrat Bragulat
Management
7 research groups are joined together in the IIiA framework:
Agents Research Laboratory (ARLab)
Broadband Communications and Distributed Systems(BCDS)
Computer Vision and Robotics (Vicorob)
Control Engineering and Intelligent Systems (eXiT)
Geometry and Graphics Group (GGG)
Laboratory of Graphics and Imaging (GIlab)
Modelling, Identification and Control EngineeringLaboratory (MICELab)
Organisation
05
Historyand Objectives
04
IIiA RESEARCH REPORT’07

The Institute of Informatics and Applications (IIiA) is a researchinstitute of the University of Girona created in 1996. IIiA ishighly active in research, both basic and industry-oriented,as well as in technology transfer actions.
The IIiA currently has more than 140 members, includingover 50 doctors. Researchers run their activities in differentfields such as computer graphics, computer vision, robotics,telecommunications, automatics, control engineering, and
artificial intelligence. They are members of three departmentsof the University of Girona: the Department of ComputerArchitecture and Technology, the Department of ElectricalEngineering, Electronics and Automatics, and the Departmentof Informatics and Applied Mathematics.
Organisationand Management
The main purpose of the IIiA is to acquire an internationalreputation in its scientific and technical activity. This reputationhas its basis in the conception, design and implementationof R&D projects and technology transfer contracts.
These activities produce innovative results in all their phases,both in scientific and engineering terms. Moreover, theInstitute aims at contributing to the economic developmentand growth of its region industrial context in the InformationTechnologies sector.
The IIiA specific objectives are:
To promote research activities, technology transfer andspecialized teaching in the fields of InformationTechnologies and its applications.
To foster and coordinate interdisciplinary projects usingthe different areas of expertise of the institute members.
To encourage the development of pre-competitive projectsand its materialization in technology innovation contracts.
To motivate the participation of the University of Gironain consortiums that focus on research lines close to theones of its members. The Institute acts as the representa-tive of the University in such consortiums.
History
Objectives
The Council is the most important management body andit is composed of all the academic staff of the Institute.
The Director is the head of the Institute. It is elected afteran open selection process.
An Executive Commission represents the council and givesadvice to the Director in government tasks. It is formed bythe Director, the head of each research group, the academicsecretary and the research manager.
The Research Manager is responsible for the internaloperation of the Institute.
The Academic Secretary is in charge of writing the minutesof the Council and Executive Commission meetings andwrite certificates of the agreements reached on them.
Director: Dr. Josep Vehí
Head of ARLab: Dr. Josep Lluís de la Rosa
Head of BCDS: Dr. Josep Lluís Marzo
Head of eXiT: Dr. Joaquim Meléndez
Head of GGG: Prof. Dr. Xavier Pueyo / Dr. Joan AntoniSellarès
Head of GILab: Prof. Dr. Mateu Sbert
Head of MICE: Dr. Josep Vehí
Head of Vicorob: Dr. Jordi Freixenet
Technical Secretary: Mr. Xavier Manyer
Research Manager: Ms. Denisa Gibovic
Academic Secretary: Dr. Marc Carreras
The Secretariat of the Institute provides administrative supportto the Institute Members.
Assistants: Ms. Rosa Teixidor, Ms.Montserrat Bragulat
Management
7 research groups are joined together in the IIiA framework:
Agents Research Laboratory (ARLab)
Broadband Communications and Distributed Systems(BCDS)
Computer Vision and Robotics (Vicorob)
Control Engineering and Intelligent Systems (eXiT)
Geometry and Graphics Group (GGG)
Laboratory of Graphics and Imaging (GIlab)
Modelling, Identification and Control EngineeringLaboratory (MICELab)
Organisation
05
Historyand Objectives
04
IIiA RESEARCH REPORT’07
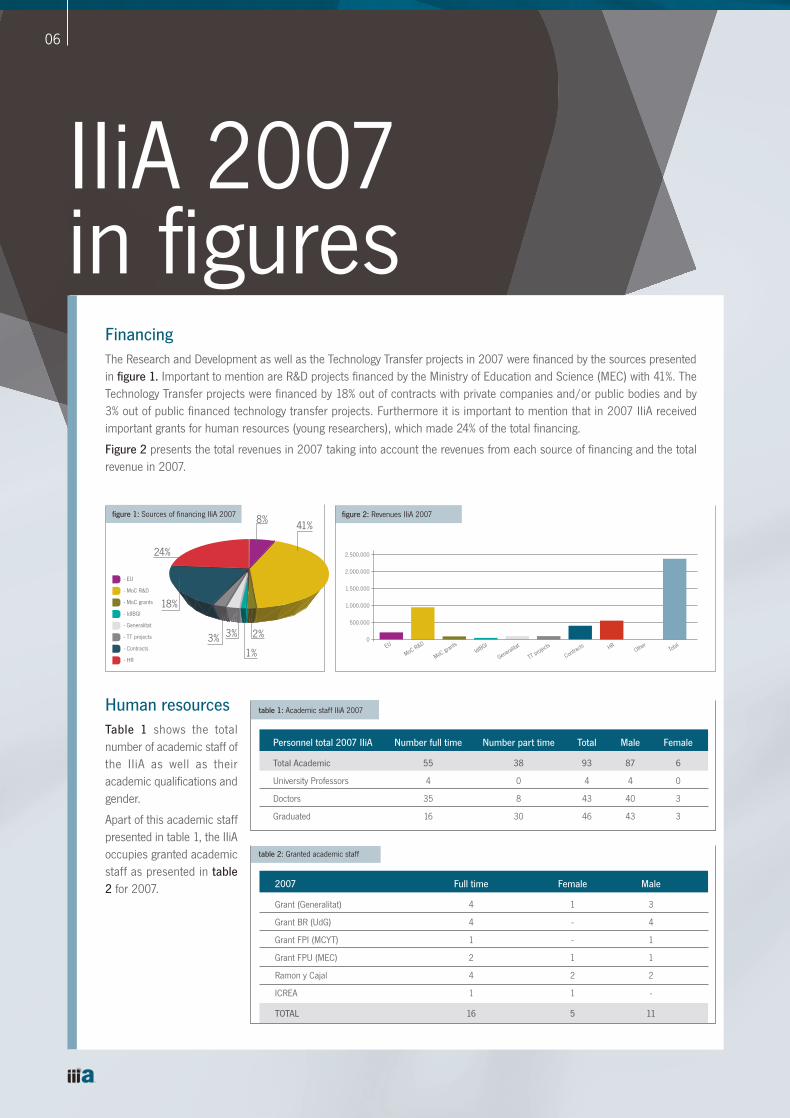
The Research and Development as well as the Technology Transfer projects in 2007 were financed by the sources presentedin figure 1. Important to mention are R&D projects financed by the Ministry of Education and Science (MEC) with 41%. TheTechnology Transfer projects were financed by 18% out of contracts with private companies and/or public bodies and by3% out of public financed technology transfer projects. Furthermore it is important to mention that in 2007 IIiA receivedimportant grants for human resources (young researchers), which made 24% of the total financing.
Figure 2 presents the total revenues in 2007 taking into account the revenues from each source of financing and the totalrevenue in 2007.
Financing
07
IIiA 2007in figures
06
IIiA RESEARCH REPORT’07
Table 1 shows the totalnumber of academic staff ofthe IIiA as well as theiracademic qualifications andgender.
Apart of this academic staffpresented in table 1, the IIiAoccupies granted academicstaff as presented in table2 for 2007.
Human resources table 1: Academic staff IIiA 2007
Personnel total 2007 IIiA Number full time Number part time Total Male Female
Total Academic 55 38 93 87 6
University Professors 4 0 4 4 0
Doctors 35 8 43 40 3
Graduated 16 30 46 43 3
table 2: Granted academic staff
2.500.000
2.000.000
1.500.000
1.000.000
500.000
0
TT projects
Contracts HR
OtherTot
al
Generalita
tIdIBGI
MoC grants
MoC R&DEU
figure 2: Revenues IIiA 2007
- EU
- MoC R&D
- MoC grants
- IdIBGI
- Generalitat
- TT projects
- Contracts
- HR
figure 1: Sources of financing IIiA 2007
41%8%
2%
1%
3%3%
18%
24%
2007 Full time Female Male
Grant (Generalitat) 4 1 3
Grant BR (UdG) 4 - 4
Grant FPI (MCYT) 1 - 1
Grant FPU (MEC) 2 1 1
Ramon y Cajal 4 2 2
ICREA 1 1 -
TOTAL 16 5 11
ResearchGroups
The BCDS group (ref. GRCT40) is active in two main researchareas: Broadband Network Control and Management andDistributed Systems. The group has led several long-termgovernmental projects involving other universities andcompanies like Internet Service Providers and Public HealthInstitutions. These projects, along with the basic researchperformed on the group, bring many publications andcontributions on international journals, symposiums andconferences. BCDS carries out its research within the Instituteof Informatics and Applications at the University of Girona,and it is also part of the DURSI consolidated research groupAEDS (ref. SGR-00296).
Research lines and application domains
Control and Management of Quality of Service (QoS)networks: protection scheme selection and routing andnetwork resource usage improvements.
Multi-Agent Systems in Distributed NetworkManagement: flexible tools for automatic decisiontaking and corrective actions.
Optimization Techniques (Ant Colony Opt., MultiobjectiveGenetic Algorithms, Linear Programming, etc).
Connection Admission Control Mechanisms forelastic(TCP) traffic: network schemes that guarantee minimumthroughput, isolation between flows and per-flow statereduction of signalling and processing.
Dynamic Resource Allocation and Load Balancing.
Charging for Multicast QoS Services: a rational costallocation/recovery tool.
Multi-level ([G]MPLS & optical) Routing and Protectionmechanisms.
Metro Ethernet: Control and Scalability issues.
Distributed Processing and Parallelism (Grids): thread-
level parallel extraction and utilization mechanism indistributed environments based in clustering and usingspeculation techniques.
Distributed Artificial Intelligence: Multi-Agent Systems.
Open and Distance Learning: different approaches tosupport open learning process by means of artificialintelligence techniques.
- Adaptive Models for Distance Learning
- Dynamic Adaptive Hypermedia Systems
Industrial partners
Aegis Security, Intercom Telemàtica Girona, CEMA, FEM,GRN.
Website link
http://bcds.udg.edu
Broadband Communications and Distributed Systems (BCDS)
Broadband Communications andDistributed Systems

The Research and Development as well as the Technology Transfer projects in 2007 were financed by the sources presentedin figure 1. Important to mention are R&D projects financed by the Ministry of Education and Science (MEC) with 41%. TheTechnology Transfer projects were financed by 18% out of contracts with private companies and/or public bodies and by3% out of public financed technology transfer projects. Furthermore it is important to mention that in 2007 IIiA receivedimportant grants for human resources (young researchers), which made 24% of the total financing.
Figure 2 presents the total revenues in 2007 taking into account the revenues from each source of financing and the totalrevenue in 2007.
Financing
07
IIiA 2007in figures
06
IIiA RESEARCH REPORT’07
Table 1 shows the totalnumber of academic staff ofthe IIiA as well as theiracademic qualifications andgender.
Apart of this academic staffpresented in table 1, the IIiAoccupies granted academicstaff as presented in table2 for 2007.
Human resources table 1: Academic staff IIiA 2007
Personnel total 2007 IIiA Number full time Number part time Total Male Female
Total Academic 55 38 93 87 6
University Professors 4 0 4 4 0
Doctors 35 8 43 40 3
Graduated 16 30 46 43 3
table 2: Granted academic staff
2.500.000
2.000.000
1.500.000
1.000.000
500.000
0
TT projects
Contracts HR
OtherTot
al
Generalita
tIdIBGI
MoC grants
MoC R&DEU
figure 2: Revenues IIiA 2007
- EU
- MoC R&D
- MoC grants
- IdIBGI
- Generalitat
- TT projects
- Contracts
- HR
figure 1: Sources of financing IIiA 2007
41%8%
2%
1%
3%3%
18%
24%
2007 Full time Female Male
Grant (Generalitat) 4 1 3
Grant BR (UdG) 4 - 4
Grant FPI (MCYT) 1 - 1
Grant FPU (MEC) 2 1 1
Ramon y Cajal 4 2 2
ICREA 1 1 -
TOTAL 16 5 11
ResearchGroups
The BCDS group (ref. GRCT40) is active in two main researchareas: Broadband Network Control and Management andDistributed Systems. The group has led several long-termgovernmental projects involving other universities andcompanies like Internet Service Providers and Public HealthInstitutions. These projects, along with the basic researchperformed on the group, bring many publications andcontributions on international journals, symposiums andconferences. BCDS carries out its research within the Instituteof Informatics and Applications at the University of Girona,and it is also part of the DURSI consolidated research groupAEDS (ref. SGR-00296).
Research lines and application domains
Control and Management of Quality of Service (QoS)networks: protection scheme selection and routing andnetwork resource usage improvements.
Multi-Agent Systems in Distributed NetworkManagement: flexible tools for automatic decisiontaking and corrective actions.
Optimization Techniques (Ant Colony Opt., MultiobjectiveGenetic Algorithms, Linear Programming, etc).
Connection Admission Control Mechanisms forelastic(TCP) traffic: network schemes that guarantee minimumthroughput, isolation between flows and per-flow statereduction of signalling and processing.
Dynamic Resource Allocation and Load Balancing.
Charging for Multicast QoS Services: a rational costallocation/recovery tool.
Multi-level ([G]MPLS & optical) Routing and Protectionmechanisms.
Metro Ethernet: Control and Scalability issues.
Distributed Processing and Parallelism (Grids): thread-
level parallel extraction and utilization mechanism indistributed environments based in clustering and usingspeculation techniques.
Distributed Artificial Intelligence: Multi-Agent Systems.
Open and Distance Learning: different approaches tosupport open learning process by means of artificialintelligence techniques.
- Adaptive Models for Distance Learning
- Dynamic Adaptive Hypermedia Systems
Industrial partners
Aegis Security, Intercom Telemàtica Girona, CEMA, FEM,GRN.
Website link
http://bcds.udg.edu
Broadband Communications and Distributed Systems (BCDS)
Broadband Communications andDistributed Systems
0908
IIiA RESEARCH REPORT’07
The activity of the group is mainly devoted to study anddevelop new methods to cope with actual and futurenecessities of process monitoring and supervision.
Main activity is focused on the efficient exploitation of databased on data mining and knowledge discovery principles:
Research lines and application domains
Multivariate Statistical Process Control.
Agent Based Systems for Distributed Scheduling andResource Allocation.
Power Quality Monitoring of Electrical DistributionSystems.
Data Mining for medical Diagnosis and Prognosis.
Research results obtained in these lines are tested inchallenging domains involving third party collaborators toidentify real breakthrough achievements.
Power Quality Monitoring: Automatic diagnosis of sagsand fault location in distribution networks.
Batch Process Monitoring: Statistical monitoring ofwaste water treatment plants with Sequential Batchreactors.
Off Line Monitoring of ARIANE flights: Identificationof abnormal flights from the analysis of sensor registersduring the flights.
Blast Furnaces: On line monitoring of Pressures.
Moulding: Off line assessment of moulds (ageing andabnormal behaviours) based on injection pressuresand temperatures.
Data Mining in medical Diagnosis and Prognosis:data mining principles to analyse historical clinical dataof patients with obesity and cancer dysfunctions.
Agent Market Based Mechanisms for DistributedSystems: Scheduling and Optimisation of Waste WaterTreatment plants based on auctions.
Multi-agent robot control: Multi-agent resourcecoordination for controlling an autonomous robot(Pioneer).
Industrial partners
Endesa Distribución, Aigües de Girona, Iberespacio, Plastiasite,ASCAMM, Hutchinson Palamos, Corus (UK), Hospital JosepTrueta.
Website link
http://exit.udg,edu
Control Engineering and Intelligent Systems (eXiT)
Enginyeria de Control i Sistemes Intel·ligents
Subgroups
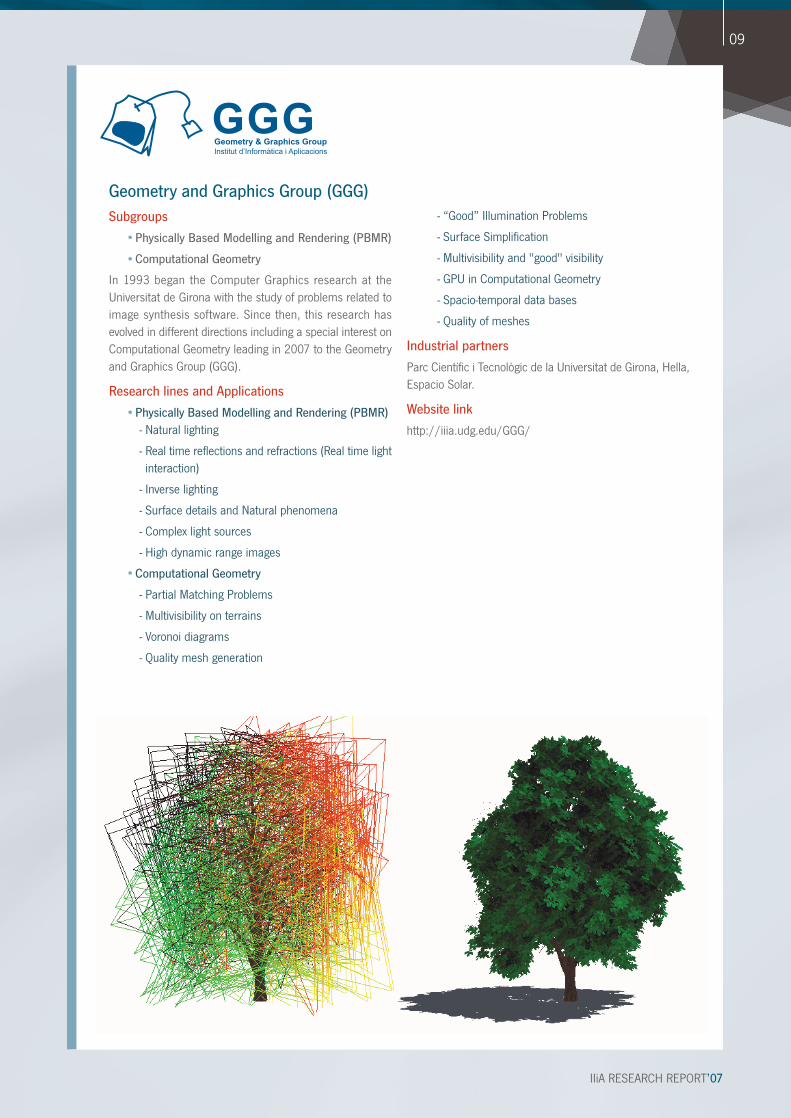
Physically Based Modelling and Rendering (PBMR)
Computational Geometry
In 1993 began the Computer Graphics research at theUniversitat de Girona with the study of problems related toimage synthesis software. Since then, this research hasevolved in different directions including a special interest onComputational Geometry leading in 2007 to the Geometryand Graphics Group (GGG).
Research lines and Applications
Physically Based Modelling and Rendering (PBMR)- Natural lighting
- Real time reflections and refractions (Real time lightinteraction)
- Inverse lighting
- Surface details and Natural phenomena
- Complex light sources
- High dynamic range images
Computational Geometry
- Partial Matching Problems
- Multivisibility on terrains
- Voronoi diagrams
- Quality mesh generation
- “Good” Illumination Problems
- Surface Simplification
- Multivisibility and "good" visibility
- GPU in Computational Geometry
- Spacio-temporal data bases
- Quality of meshes
Industrial partners
Parc Científic i Tecnològic de la Universitat de Girona, Hella,Espacio Solar.
Website link
http://iiia.udg.edu/GGG/
Geometry and Graphics Group (GGG)
0908
IIiA RESEARCH REPORT’07
The activity of the group is mainly devoted to study anddevelop new methods to cope with actual and futurenecessities of process monitoring and supervision.
Main activity is focused on the efficient exploitation of databased on data mining and knowledge discovery principles:
Research lines and application domains
Multivariate Statistical Process Control.
Agent Based Systems for Distributed Scheduling andResource Allocation.
Power Quality Monitoring of Electrical DistributionSystems.
Data Mining for medical Diagnosis and Prognosis.
Research results obtained in these lines are tested inchallenging domains involving third party collaborators toidentify real breakthrough achievements.
Power Quality Monitoring: Automatic diagnosis of sagsand fault location in distribution networks.
Batch Process Monitoring: Statistical monitoring ofwaste water treatment plants with Sequential Batchreactors.
Off Line Monitoring of ARIANE flights: Identificationof abnormal flights from the analysis of sensor registersduring the flights.
Blast Furnaces: On line monitoring of Pressures.
Moulding: Off line assessment of moulds (ageing andabnormal behaviours) based on injection pressuresand temperatures.
Data Mining in medical Diagnosis and Prognosis:data mining principles to analyse historical clinical dataof patients with obesity and cancer dysfunctions.
Agent Market Based Mechanisms for DistributedSystems: Scheduling and Optimisation of Waste WaterTreatment plants based on auctions.
Multi-agent robot control: Multi-agent resourcecoordination for controlling an autonomous robot(Pioneer).
Industrial partners
Endesa Distribución, Aigües de Girona, Iberespacio, Plastiasite,ASCAMM, Hutchinson Palamos, Corus (UK), Hospital JosepTrueta.
Website link
http://exit.udg,edu
Control Engineering and Intelligent Systems (eXiT)
Enginyeria de Control i Sistemes Intel·ligents
Subgroups
Physically Based Modelling and Rendering (PBMR)
Computational Geometry
In 1993 began the Computer Graphics research at theUniversitat de Girona with the study of problems related toimage synthesis software. Since then, this research hasevolved in different directions including a special interest onComputational Geometry leading in 2007 to the Geometryand Graphics Group (GGG).
Research lines and Applications
Physically Based Modelling and Rendering (PBMR)- Natural lighting
- Real time reflections and refractions (Real time lightinteraction)
- Inverse lighting
- Surface details and Natural phenomena
- Complex light sources
- High dynamic range images
Computational Geometry
- Partial Matching Problems
- Multivisibility on terrains
- Voronoi diagrams
- Quality mesh generation
- “Good” Illumination Problems
- Surface Simplification
- Multivisibility and "good" visibility
- GPU in Computational Geometry
- Spacio-temporal data bases
- Quality of meshes
Industrial partners
Parc Científic i Tecnològic de la Universitat de Girona, Hella,Espacio Solar.
Website link
http://iiia.udg.edu/GGG/
Geometry and Graphics Group (GGG)
1110
IIiA RESEARCH REPORT’07
MICELab is a multidisciplinary team composed of experiencedresearchers from the control engineering field with expertisein systems and control theory, modelling and control ofbiomedical systems, uncertain dynamical systems, robustand predictive control and decision support systems.
Research areas
Control Engineering
- Robust and non-linear control.
- Fault detection and diagnostics of uncertain dynamicsystems.
- Structural health monitoring.
Biomedical Engineering
- Modelling and control in type 1 diabetes.
- Development of glycemic predictive models.- Technologies for metabolic control.
Interval Analysis
- Theoretical development of Modal Interval Analysis(MIA).
- Interval simulation.
- Applications of intervals to systems and control.
Application fields
Biomedical applications
- Artificial Pancreas.
- Closed loop glucose control in critically ill patients.- Insulin dosage-aid systems.
Civil & Mechanical Engineering
- Mechatronics.
- Structural control.
- Structural Health monitoring.
Robotics
- Unmanned Autonomous Vehicles (AUVs).- Mobile robots.
Computer Graphics
- New rendering algorithms based on MIA.
Industrial and stategic partners
Medtronic diabetes (CA, USA), Hospital Doctor Josep Trueta,Hospital Parc Taulí, CITCEA, TWI (Cambridge, UK), Alstom(Grenoble, France), ESPA group.
Website link: http://mice.udg.es/
Modelling, Identification and Control Engineering Laboratory (MICELab)The Computer Vision and Robotics research group is formedby more than 40 researchers (18 doctors, 16 with permanentcontract; 20 PhD students among others). VICOROB developscomputer vision and image processing systems withapplications such as object detection and description, imagesegmentation, texture recognition, mosaicing, and trackingof mobile objects. One of the main application areas is thequality control of industrial products. Other fields of applicationare biomedicine, multimedia and security-related systems.The computer vision systems are also the main source ofinformation of the robots developed by the group. For instance,ICTINEU is an underwater robot made by VICOROB, usedfor underwater exploration, navigation and map building,and can be controlled in both tele-operated and autonomousway. Furthermore people from VICOROB have created threespin-offs companies (AQSENSE, DSET and CORONISCOMPUTING) and collaborate with different hospitals workingin melanoma, prostate, and breast cancer research.
Research lines and Applications
Underwater Robotics: architectures of control, learning,navigation, and mapbuilding. ROVs and AUVs.
Analysis of Medical Imaging.
Analysis of underwater imaging and mosaicing, 3Ddense reconstruction, map building, optical andacoustical data fusion, imaging polarimetry.
Analysis of image content, segmentation and description,colour and texture, 3D reconstruction of deformableobjects.
Image processing in real time and mobile robotics.
3D Imaging.
Research Labs
Underwater Robotics Lab.
Underwater Vision Lab.
Real-Time Hardware Lab.
3D Perception Lab.
Image Analysis Lab.
Collaborations with companies
Kontrelmec, Factis, Optimus, D+T Electrònica, AQSense,DSET, Frit Ravich, ADParts, CEMGREF, etc.
Website link
http://vicorob.udg.edu
Computer Vision and Robotics (Vicorob)
VICOROBVisió per Computador i RobòticaModelling, Identification and Control Engineering

1110
IIiA RESEARCH REPORT’07
MICELab is a multidisciplinary team composed of experiencedresearchers from the control engineering field with expertisein systems and control theory, modelling and control ofbiomedical systems, uncertain dynamical systems, robustand predictive control and decision support systems.
Research areas
Control Engineering
- Robust and non-linear control.
- Fault detection and diagnostics of uncertain dynamicsystems.
- Structural health monitoring.
Biomedical Engineering
- Modelling and control in type 1 diabetes.
- Development of glycemic predictive models.- Technologies for metabolic control.
Interval Analysis
- Theoretical development of Modal Interval Analysis(MIA).
- Interval simulation.
- Applications of intervals to systems and control.
Application fields
Biomedical applications
- Artificial Pancreas.
- Closed loop glucose control in critically ill patients.- Insulin dosage-aid systems.
Civil & Mechanical Engineering
- Mechatronics.
- Structural control.
- Structural Health monitoring.
Robotics
- Unmanned Autonomous Vehicles (AUVs).- Mobile robots.
Computer Graphics
- New rendering algorithms based on MIA.
Industrial and stategic partners
Medtronic diabetes (CA, USA), Hospital Doctor Josep Trueta,Hospital Parc Taulí, CITCEA, TWI (Cambridge, UK), Alstom(Grenoble, France), ESPA group.
Website link: http://mice.udg.es/
Modelling, Identification and Control Engineering Laboratory (MICELab)The Computer Vision and Robotics research group is formedby more than 40 researchers (18 doctors, 16 with permanentcontract; 20 PhD students among others). VICOROB developscomputer vision and image processing systems withapplications such as object detection and description, imagesegmentation, texture recognition, mosaicing, and trackingof mobile objects. One of the main application areas is thequality control of industrial products. Other fields of applicationare biomedicine, multimedia and security-related systems.The computer vision systems are also the main source ofinformation of the robots developed by the group. For instance,ICTINEU is an underwater robot made by VICOROB, usedfor underwater exploration, navigation and map building,and can be controlled in both tele-operated and autonomousway. Furthermore people from VICOROB have created threespin-offs companies (AQSENSE, DSET and CORONISCOMPUTING) and collaborate with different hospitals workingin melanoma, prostate, and breast cancer research.
Research lines and Applications
Underwater Robotics: architectures of control, learning,navigation, and mapbuilding. ROVs and AUVs.
Analysis of Medical Imaging.
Analysis of underwater imaging and mosaicing, 3Ddense reconstruction, map building, optical andacoustical data fusion, imaging polarimetry.
Analysis of image content, segmentation and description,colour and texture, 3D reconstruction of deformableobjects.
Image processing in real time and mobile robotics.
3D Imaging.
Research Labs
Underwater Robotics Lab.
Underwater Vision Lab.
Real-Time Hardware Lab.
3D Perception Lab.
Image Analysis Lab.
Collaborations with companies
Kontrelmec, Factis, Optimus, D+T Electrònica, AQSense,DSET, Frit Ravich, ADParts, CEMGREF, etc.
Website link
http://vicorob.udg.edu
Computer Vision and Robotics (Vicorob)
VICOROBVisió per Computador i RobòticaModelling, Identification and Control Engineering
1312
IIiA RESEARCH REPORT’07
The research of GIlab is driven by the application to computergraphics and scientific visualization of powerful informationtheory and Monte Carlo concepts and techniques. GIlabresponds to the demand of the industrial sector in differentareas such as computer games and medicine.
Research Lines and Applications
Global illumination research is focused on algorithmsfor the illumination of virtual environments. This researchis applied to videogames, animation, interior and lightingdesign, and architectural environments.
Videogames research is centred on improving thegraphic realism for games as well as its application tovirtual reality and simulation systems, and virtualsettings for movies and broadcasting.
Medical imaging research, in collaboration with medicalstaff from the main Catalan public hospitals, investigatesefficient solutions for the technical and clinical problemsin the field of medical imaging, developing new toolsto support diagnosis.
Scientific visualization research is focused on thevisualization and simplification techniques to explore 3Dmedical, molecular, and financial data, amongst others.
Viewpoint selection and object recognition researchis applied to obtain viewpoint quality measures, meshinformation and saliency, and shape descriptors tocalculate the similarity between objects of largedatabases.
Computational aesthetics research joins togetherdifferent fields such as computer science, philosophy,psychology, and the arts. In particular, we investigateinformational aesthetic measures to quantify order,complexity and information in images, paintings, andsculptures.
Industrial partners
AIJU, Brainstorm, T-Systems Iberia, Digital Legends, Infowerk,Saber Interactive, GiDoc, IDI and IRTA.
Website link
http://gilab.udg.edu
Laboratory of Graphics and Image (GILab)Agents Research Lab is concerned with the developmentand analysis of Artificial Intelligence (AI) techniques andcontrol architectures for both agents and multiagent systems.The origin of our group is the application of Artificial Intelligenceto control and supervision. In these issues, the group hasobtained successful results in the development of physicalagents. Currently, we are exploiting the particular propertiesof physical agents to personalised agents. This involvesresearch on multi-agent architectures for user modelling andrecommender systems, trust mechanisms for agentcollaboration, integration information frameworks and socialnetworks.
Research lines and Applications
Research Information Agents and Agent-basede-Commerce. Current research technologies: CaseBased Reasoning, Recommender Systems, Personali-sation, Adaptation, Consensus and Trust.
Research on Physical Agents. The aim is to includethe dynamical response of the agent's physical bodywhen committing and deciding as an individual and tostudy physically heterogeneous multi-agent systems inorder to benefit from properties of heterogeneity.
The transfer of research results proceeds over the laboratoryof transfer (TLab) of the centre EASY of the IT network ofCIDEM, and especially over the created spin-offs: AgentsInspired Technologies (2000), Catalan Research Centre One(2005) and Strategic Attention Management (2007).
Industrial partners
Municipality of Terrassa, La Caixa, Metalquimia, Manter,CRIC, emagister, Transports Pujol & Pujol S.L, PSM-CarlsonMarketing Group, Manter, Byrom.plc, Catalan ResearchCenter One.
Website link
http://eia.udg.edu/arlab/
Agents Research Lab (ARLab)
1312
IIiA RESEARCH REPORT’07
The research of GIlab is driven by the application to computergraphics and scientific visualization of powerful informationtheory and Monte Carlo concepts and techniques. GIlabresponds to the demand of the industrial sector in differentareas such as computer games and medicine.
Research Lines and Applications
Global illumination research is focused on algorithmsfor the illumination of virtual environments. This researchis applied to videogames, animation, interior and lightingdesign, and architectural environments.
Videogames research is centred on improving thegraphic realism for games as well as its application tovirtual reality and simulation systems, and virtualsettings for movies and broadcasting.
Medical imaging research, in collaboration with medicalstaff from the main Catalan public hospitals, investigatesefficient solutions for the technical and clinical problemsin the field of medical imaging, developing new toolsto support diagnosis.
Scientific visualization research is focused on thevisualization and simplification techniques to explore 3Dmedical, molecular, and financial data, amongst others.
Viewpoint selection and object recognition researchis applied to obtain viewpoint quality measures, meshinformation and saliency, and shape descriptors tocalculate the similarity between objects of largedatabases.
Computational aesthetics research joins togetherdifferent fields such as computer science, philosophy,psychology, and the arts. In particular, we investigateinformational aesthetic measures to quantify order,complexity and information in images, paintings, andsculptures.
Industrial partners
AIJU, Brainstorm, T-Systems Iberia, Digital Legends, Infowerk,Saber Interactive, GiDoc, IDI and IRTA.
Website link
http://gilab.udg.edu
Laboratory of Graphics and Image (GILab)Agents Research Lab is concerned with the developmentand analysis of Artificial Intelligence (AI) techniques andcontrol architectures for both agents and multiagent systems.The origin of our group is the application of Artificial Intelligenceto control and supervision. In these issues, the group hasobtained successful results in the development of physicalagents. Currently, we are exploiting the particular propertiesof physical agents to personalised agents. This involvesresearch on multi-agent architectures for user modelling andrecommender systems, trust mechanisms for agentcollaboration, integration information frameworks and socialnetworks.
Research lines and Applications
Research Information Agents and Agent-basede-Commerce. Current research technologies: CaseBased Reasoning, Recommender Systems, Personali-sation, Adaptation, Consensus and Trust.
Research on Physical Agents. The aim is to includethe dynamical response of the agent's physical bodywhen committing and deciding as an individual and tostudy physically heterogeneous multi-agent systems inorder to benefit from properties of heterogeneity.
The transfer of research results proceeds over the laboratoryof transfer (TLab) of the centre EASY of the IT network ofCIDEM, and especially over the created spin-offs: AgentsInspired Technologies (2000), Catalan Research Centre One(2005) and Strategic Attention Management (2007).
Industrial partners
Municipality of Terrassa, La Caixa, Metalquimia, Manter,CRIC, emagister, Transports Pujol & Pujol S.L, PSM-CarlsonMarketing Group, Manter, Byrom.plc, Catalan ResearchCenter One.
Website link
http://eia.udg.edu/arlab/
Agents Research Lab (ARLab)
15
Public-FundedResearch Projects
14
IIiA RESEARCH REPORT’07
MRTN-CT-2006-036186- FREESUBNET
Project Type: Marie Curie RTN
Duration: 48 Months
Start: November 2006
Budget: 195.695 € UdG
Partners: University of Southampton - UNITED KINGDOM, CEA - FRANCE, CNR Robot - ITALY, CNRS - FRANCE, Cybernetix FRANCE,Hellenice Centre for Maritime Reserach - GREECE, Heriot Watt University - UNITED KINGDOM, IFREMER - FRANCE, IST - PORTUGAL,JRC - ITALY, NTNU - NORWAY, University of Hannover - GERMANY, University of Craiova - ROMANIA, University de Girona - SPAIN,University of Azores - PORTUGAL
Coordinator: Prof. Philip Alan Wilson (U. of Southampton)
Coordinator UdG: Pere Ridao
UdG Team: Pere Ridao, Rafel García
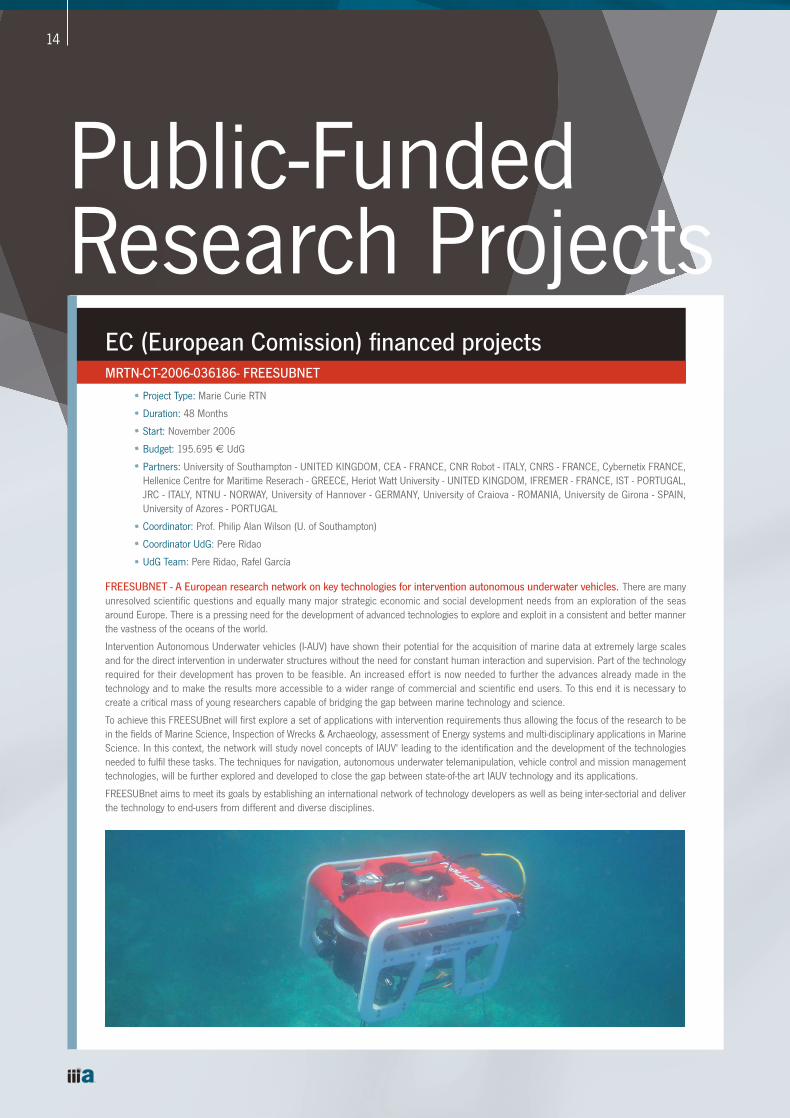
FREESUBNET - A European research network on key technologies for intervention autonomous underwater vehicles. There are manyunresolved scientific questions and equally many major strategic economic and social development needs from an exploration of the seasaround Europe. There is a pressing need for the development of advanced technologies to explore and exploit in a consistent and better mannerthe vastness of the oceans of the world.
Intervention Autonomous Underwater vehicles (I-AUV) have shown their potential for the acquisition of marine data at extremely large scalesand for the direct intervention in underwater structures without the need for constant human interaction and supervision. Part of the technologyrequired for their development has proven to be feasible. An increased effort is now needed to further the advances already made in thetechnology and to make the results more accessible to a wider range of commercial and scientific end users. To this end it is necessary tocreate a critical mass of young researchers capable of bridging the gap between marine technology and science.
To achieve this FREESUBnet will first explore a set of applications with intervention requirements thus allowing the focus of the research to bein the fields of Marine Science, Inspection of Wrecks & Archaeology, assessment of Energy systems and multi-disciplinary applications in MarineScience. In this context, the network will study novel concepts of IAUV' leading to the identification and the development of the technologiesneeded to fulfil these tasks. The techniques for navigation, autonomous underwater telemanipulation, vehicle control and mission managementtechnologies, will be further explored and developed to close the gap between state-of-the art IAUV technology and its applications.
FREESUBnet aims to meet its goals by establishing an international network of technology developers as well as being inter-sectorial and deliverthe technology to end-users from different and diverse disciplines.
EC (European Comission) financed projects
IST-2-004363- Game Tools
Project Type: STREP of IST-FP6
Duration: 33 Months
Start: September 2004
Budget: 1.649.863 € (245.100 € UdG)
Partners: University of Girona (UdG) - Spain, University Jaume I (UJI) - Spain, Vienna Institute of Technology (VUT) - Austria, BudapestUniversity of Technology and Economics (BUTE) - Hungary, Technical University of Valencia (UPV) - Spain, Universitée de Limoges(Unilim) - France, Asociación de investigación de la industria del juguete, conexas y afines (AIJU) - Spain, PGM Trading - Austria, Sektor4- Denmark, Digital Legends Entertainment - Spain, Infowerk Softwareentwicklungs - Austria, Gedas Iberia - Spain
Coordinator: Mateu Sbert (UdG)
Project Management Office: Jordi Palau and Denisa Gibovic (UdG)
UdG Team: Mateu Sbert, Miquel Feixas, Francesc Castro, Àlex Méndez, Roel Martínez, László Neumann, Jaume Rigau, Jordi Palau,Francesc González, Ismael García, Nicolau Sunyer
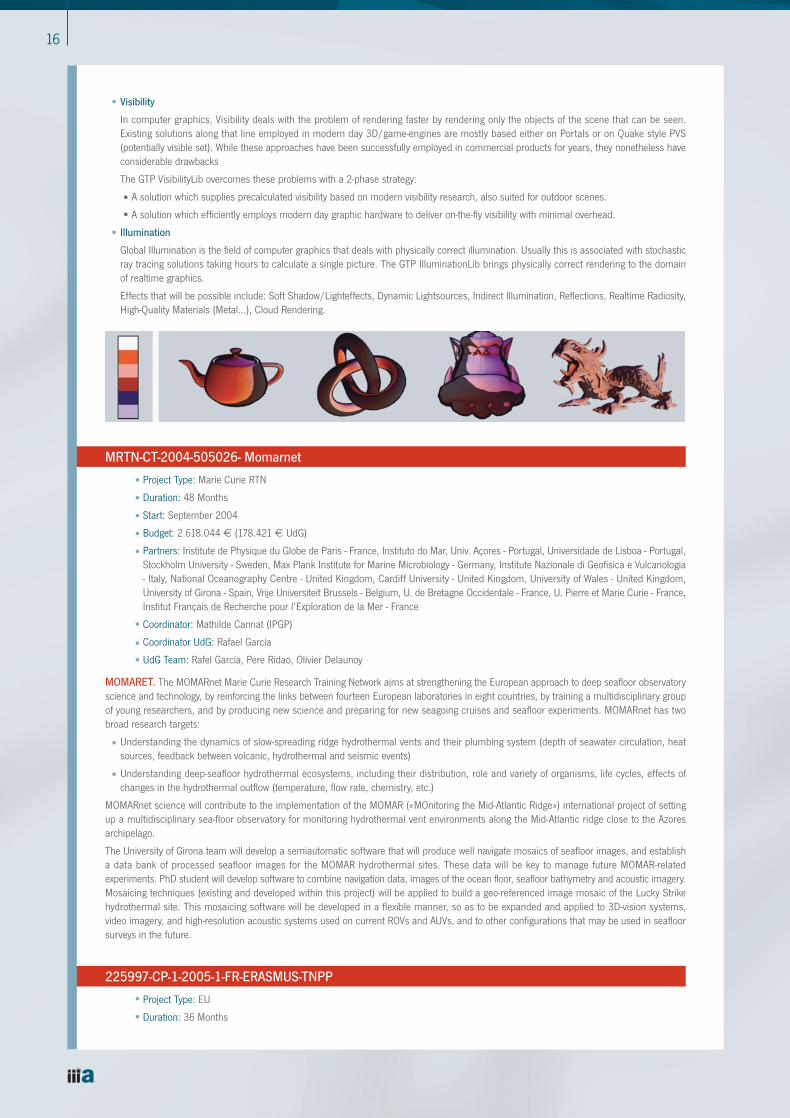
Advanced Tools for Developing Highly Realistic Computer Games (Game Tools). GameTools is a strategic project funded by the EuropeanCommission coordinated by the University of Girona. It will create next generation real time 3D libraries for Geometry, Visibility and Global Illuminationfor the PC platform using the OGRE 3D engine, with an extension to consoles PS2, Xbox, PS3, Xbox 360 through the use of Shark3D engine.
Geometry
The GTP GeometryLib supplies a Multiresolution LOD (Level of Detail) solution which addresses the shortcomings of previous approachesby giving developers access to a complete package of solid technology which supplies
A fast image based simplification algorithm to efficiently create high quality MLODs without human intervention.
Multiresolution triangle strip generation taking into account topology and texture of the base model.
A memory & runtime efficient compressed multiresolution mesh format that contains triangle strip information, avoiding the need forcostly on-the-fly tristrip generation.
A new multiresolution model specially fitted for plants allowing for an incredible amount of close up detail for e.g. leaves, while at the sametime supplying simplified representations for the fast rendering of objects which are further away.
IST-5-012990- ONE
Project Type: STREP of IST-6FP
Duration: 30 Months
Start: September 2006
Budget: 2.026.724 (154.775 € UdG)
Partners: Create-NET- Italy, Soluta.Net Est Europa Srl - Romania, Istituto Trentino di Cultura - Italy, Waterford Institute of Technology -Ireland, Universitat St. Gallen - Switzerland, Service Management International Limited - UK, Universitat de Girona - Spain, CoopserviceS. Coop. P.A. - Italy
Coordinator: Prof. Imrich Chalamatac (Create-NET)
Coordinator UdG: Josep Lluís de la Rosa (UdG)
UdG Team: Josep Lluis de la Rosa, Miquel Montaner, Patricia Gaona
ONE - Open Negotiation Environment. The ONE project is a STREP project funded by the European Commission under the DG-INFSO that isgeared towards SME’s in order to provide them with a trusted, secure and free of charge technological environment in which they are able tocreate tactical and strategic alliances; for the ultimate goal of pursuing business opportunities and growth. To keep up with the competition indigital markets SMEs have the need of developing alliances and collaborating together in order to provide joint services and also to addresslarge tenders.
ONE will be achieved through a set of technology components which can be tailored to the needs of a specific organization; conforming to itsbusiness requirements and adapting to its every requirement. The project will deliver an open source platform for negotiation, driven by innovativebusiness models and technologies; it will be implemented mainly as an integration of innovative research component, delivered within theproject, and existing with off-the-shelf technology using already standardized information models. It will extend and leverage more generalpurpose digital ecosystem architecture. There will be a general architectural framework developed for negotiation, allowing the adaptation ofthe platform to many different industry sectors.
ONE will provide a negotiation mechanism that is reusable in different application and service domains providing a great level of flexibility andallowing users for example to create negotiation processes also for other goals like for example “qualification” or “certification” processes.The ONE platform will actively support the human negotiators by exploiting automatic learning techniques applied to the goal of learning thebest negotiation strategies in a multi-agent environment. Optimized strategy would be suggested through a learning process based on theobservation of user behaviour, other partners’ actions as perceived by the user and concurrent running negotiations.
The ONE negotiation environment will support technical and non-technical users in specifying strategies and rules for negotiating terms of servicedelivery. It will provide a distributed and peer-to-peer platform for fully automated execution of negotiations based on knowledge sharing andself-learning.
15
Public-FundedResearch Projects
14
IIiA RESEARCH REPORT’07
MRTN-CT-2006-036186- FREESUBNET
Project Type: Marie Curie RTN
Duration: 48 Months
Start: November 2006
Budget: 195.695 € UdG
Partners: University of Southampton - UNITED KINGDOM, CEA - FRANCE, CNR Robot - ITALY, CNRS - FRANCE, Cybernetix FRANCE,Hellenice Centre for Maritime Reserach - GREECE, Heriot Watt University - UNITED KINGDOM, IFREMER - FRANCE, IST - PORTUGAL,JRC - ITALY, NTNU - NORWAY, University of Hannover - GERMANY, University of Craiova - ROMANIA, University de Girona - SPAIN,University of Azores - PORTUGAL
Coordinator: Prof. Philip Alan Wilson (U. of Southampton)
Coordinator UdG: Pere Ridao
UdG Team: Pere Ridao, Rafel García
FREESUBNET - A European research network on key technologies for intervention autonomous underwater vehicles. There are manyunresolved scientific questions and equally many major strategic economic and social development needs from an exploration of the seasaround Europe. There is a pressing need for the development of advanced technologies to explore and exploit in a consistent and better mannerthe vastness of the oceans of the world.
Intervention Autonomous Underwater vehicles (I-AUV) have shown their potential for the acquisition of marine data at extremely large scalesand for the direct intervention in underwater structures without the need for constant human interaction and supervision. Part of the technologyrequired for their development has proven to be feasible. An increased effort is now needed to further the advances already made in thetechnology and to make the results more accessible to a wider range of commercial and scientific end users. To this end it is necessary tocreate a critical mass of young researchers capable of bridging the gap between marine technology and science.
To achieve this FREESUBnet will first explore a set of applications with intervention requirements thus allowing the focus of the research to bein the fields of Marine Science, Inspection of Wrecks & Archaeology, assessment of Energy systems and multi-disciplinary applications in MarineScience. In this context, the network will study novel concepts of IAUV' leading to the identification and the development of the technologiesneeded to fulfil these tasks. The techniques for navigation, autonomous underwater telemanipulation, vehicle control and mission managementtechnologies, will be further explored and developed to close the gap between state-of-the art IAUV technology and its applications.
FREESUBnet aims to meet its goals by establishing an international network of technology developers as well as being inter-sectorial and deliverthe technology to end-users from different and diverse disciplines.
EC (European Comission) financed projects
IST-2-004363- Game Tools
Project Type: STREP of IST-FP6
Duration: 33 Months
Start: September 2004
Budget: 1.649.863 € (245.100 € UdG)
Partners: University of Girona (UdG) - Spain, University Jaume I (UJI) - Spain, Vienna Institute of Technology (VUT) - Austria, BudapestUniversity of Technology and Economics (BUTE) - Hungary, Technical University of Valencia (UPV) - Spain, Universitée de Limoges(Unilim) - France, Asociación de investigación de la industria del juguete, conexas y afines (AIJU) - Spain, PGM Trading - Austria, Sektor4- Denmark, Digital Legends Entertainment - Spain, Infowerk Softwareentwicklungs - Austria, Gedas Iberia - Spain
Coordinator: Mateu Sbert (UdG)
Project Management Office: Jordi Palau and Denisa Gibovic (UdG)
UdG Team: Mateu Sbert, Miquel Feixas, Francesc Castro, Àlex Méndez, Roel Martínez, László Neumann, Jaume Rigau, Jordi Palau,Francesc González, Ismael García, Nicolau Sunyer
Advanced Tools for Developing Highly Realistic Computer Games (Game Tools). GameTools is a strategic project funded by the EuropeanCommission coordinated by the University of Girona. It will create next generation real time 3D libraries for Geometry, Visibility and Global Illuminationfor the PC platform using the OGRE 3D engine, with an extension to consoles PS2, Xbox, PS3, Xbox 360 through the use of Shark3D engine.
Geometry
The GTP GeometryLib supplies a Multiresolution LOD (Level of Detail) solution which addresses the shortcomings of previous approachesby giving developers access to a complete package of solid technology which supplies
A fast image based simplification algorithm to efficiently create high quality MLODs without human intervention.
Multiresolution triangle strip generation taking into account topology and texture of the base model.
A memory & runtime efficient compressed multiresolution mesh format that contains triangle strip information, avoiding the need forcostly on-the-fly tristrip generation.
A new multiresolution model specially fitted for plants allowing for an incredible amount of close up detail for e.g. leaves, while at the sametime supplying simplified representations for the fast rendering of objects which are further away.
IST-5-012990- ONE
Project Type: STREP of IST-6FP
Duration: 30 Months
Start: September 2006
Budget: 2.026.724 (154.775 € UdG)
Partners: Create-NET- Italy, Soluta.Net Est Europa Srl - Romania, Istituto Trentino di Cultura - Italy, Waterford Institute of Technology -Ireland, Universitat St. Gallen - Switzerland, Service Management International Limited - UK, Universitat de Girona - Spain, CoopserviceS. Coop. P.A. - Italy
Coordinator: Prof. Imrich Chalamatac (Create-NET)
Coordinator UdG: Josep Lluís de la Rosa (UdG)
UdG Team: Josep Lluis de la Rosa, Miquel Montaner, Patricia Gaona
ONE - Open Negotiation Environment. The ONE project is a STREP project funded by the European Commission under the DG-INFSO that isgeared towards SME’s in order to provide them with a trusted, secure and free of charge technological environment in which they are able tocreate tactical and strategic alliances; for the ultimate goal of pursuing business opportunities and growth. To keep up with the competition indigital markets SMEs have the need of developing alliances and collaborating together in order to provide joint services and also to addresslarge tenders.
ONE will be achieved through a set of technology components which can be tailored to the needs of a specific organization; conforming to itsbusiness requirements and adapting to its every requirement. The project will deliver an open source platform for negotiation, driven by innovativebusiness models and technologies; it will be implemented mainly as an integration of innovative research component, delivered within theproject, and existing with off-the-shelf technology using already standardized information models. It will extend and leverage more generalpurpose digital ecosystem architecture. There will be a general architectural framework developed for negotiation, allowing the adaptation ofthe platform to many different industry sectors.
ONE will provide a negotiation mechanism that is reusable in different application and service domains providing a great level of flexibility andallowing users for example to create negotiation processes also for other goals like for example “qualification” or “certification” processes.The ONE platform will actively support the human negotiators by exploiting automatic learning techniques applied to the goal of learning thebest negotiation strategies in a multi-agent environment. Optimized strategy would be suggested through a learning process based on theobservation of user behaviour, other partners’ actions as perceived by the user and concurrent running negotiations.
The ONE negotiation environment will support technical and non-technical users in specifying strategies and rules for negotiating terms of servicedelivery. It will provide a distributed and peer-to-peer platform for fully automated execution of negotiations based on knowledge sharing andself-learning.
1716
IIiA RESEARCH REPORT’07
MRTN-CT-2004-505026- Momarnet
Project Type: Marie Curie RTN
Duration: 48 Months
Start: September 2004
Budget: 2.618.044 € (178.421 € UdG)
Partners: Institute de Physique du Globe de Paris - France, Instituto do Mar, Univ. Açores - Portugal, Universidade de Lisboa - Portugal,Stockholm University - Sweden, Max Plank Institute for Marine Microbiology - Germany, Institute Nazionale di Geofisica e Vulcanologia- Italy, National Oceanography Centre - United Kingdom, Cardiff University - United Kingdom, University of Wales - United Kingdom,University of Girona - Spain, Vrije Universiteit Brussels - Belgium, U. de Bretagne Occidentale - France, U. Pierre et Marie Curie - France,Institut Français de Recherche pour l’Exploration de la Mer - France
Coordinator: Mathilde Cannat (IPGP)
Coordinator UdG: Rafael García
UdG Team: Rafel García, Pere Ridao, Olivier Delaunoy
MOMARET. The MOMARnet Marie Curie Research Training Network aims at strengthening the European approach to deep seafloor observatoryscience and technology, by reinforcing the links between fourteen European laboratories in eight countries, by training a multidisciplinary groupof young researchers, and by producing new science and preparing for new seagoing cruises and seafloor experiments. MOMARnet has twobroad research targets:
Understanding the dynamics of slow-spreading ridge hydrothermal vents and their plumbing system (depth of seawater circulation, heatsources, feedback between volcanic, hydrothermal and seismic events)
Understanding deep-seafloor hydrothermal ecosystems, including their distribution, role and variety of organisms, life cycles, effects ofchanges in the hydrothermal outflow (temperature, flow rate, chemistry, etc.)
MOMARnet science will contribute to the implementation of the MOMAR («MOnitoring the Mid-Atlantic Ridge») international project of settingup a multidisciplinary sea-floor observatory for monitoring hydrothermal vent environments along the Mid-Atlantic ridge close to the Azoresarchipelago.
The University of Girona team will develop a semiautomatic software that will produce well navigate mosaics of seafloor images, and establisha data bank of processed seafloor images for the MOMAR hydrothermal sites. These data will be key to manage future MOMAR-relatedexperiments. PhD student will develop software to combine navigation data, images of the ocean floor, seafloor bathymetry and acoustic imagery.Mosaicing techniques (existing and developed within this project) will be applied to build a geo-referenced image mosaic of the Lucky Strikehydrothermal site. This mosaicing software will be developed in a flexible manner, so as to be expanded and applied to 3D-vision systems,video imagery, and high-resolution acoustic systems used on current ROVs and AUVs, and to other configurations that may be used in seafloorsurveys in the future.
EU COST 293
Project Type: EU
Duration: 48 Months
Start: October 2004
Budget: 40.000 €/year
Partners: For a listing of the 42 participating institutions see “People” > “Institutions” at http://www.cost293.org
Coordinator: Arie Koster (University of Warwick, UK)
UdG coordinator: Josep Lluís Marzo
COST Action 293: Graphs and algorithms in communication networks (GRAAL). The main objective of this Action is to elaborate globaland solid advances in the design of communication networks by letting experts and researchers with strong mathematical background meetpeers specialized in communication networks, and share their mutual experience by forming a multidisciplinary scientific co-operation community.
More precisely, it is intended that scientists performing fundamental research in specific mathematical disciplines – including in particulardiscrete mathematics, algorithmics, mathematical optimisation, and distributed computing – will help solving problems proposed by scientistsinvolved in practical research in the area of communication networks, covering broadband packet network design, backbone optical networkdesign, multi-layer networks design, as well as wireless and ad-hoc networks design.
The discussion space will benefit to both scientific communities focusing on theoretical and practical research. On one hand, practical researcherswill benefit from high-level theoretical and formal approaches to design comprehensive and efficient algorithmic-based solutions, as an essentialcomplement to ad-hoc or heuristics-based solutions. As an example, the most recent advances in the design of efficient broadband and backbonenetworks were achieved by merging linear optimization methods/tools with graph theoretic ones. Thus practice-oriented researchers will learnhow to use theoretical results to solve practical problems and improve existing solutions.
For a detailed description see “What is GRAAL?” at http://www.cost293.org/
225997-CP-1-2005-1-FR-ERASMUS-TNPP
Project Type: EU
Duration: 36 Months
Visibility
In computer graphics, Visibility deals with the problem of rendering faster by rendering only the objects of the scene that can be seen.Existing solutions along that line employed in modern day 3D/game-engines are mostly based either on Portals or on Quake style PVS(potentially visible set). While these approaches have been successfully employed in commercial products for years, they nonetheless haveconsiderable drawbacks
The GTP VisibilityLib overcomes these problems with a 2-phase strategy:
A solution which supplies precalculated visibility based on modern visibility research, also suited for outdoor scenes.
A solution which efficiently employs modern day graphic hardware to deliver on-the-fly visibility with minimal overhead.
Illumination
Global Illumination is the field of computer graphics that deals with physically correct illumination. Usually this is associated with stochasticray tracing solutions taking hours to calculate a single picture. The GTP IlluminationLib brings physically correct rendering to the domainof realtime graphics.
Effects that will be possible include: Soft Shadow/Lighteffects, Dynamic Lightsources, Indirect Illumination, Reflections, Realtime Radiosity,High-Quality Materials (Metal...), Cloud Rendering.
Start: October 2005
Partners: Please see http://www.eie-surveyor.org/partners.htm
Coordinator: Jean-Marc THIRIET (Université Henri Poincaré Nancy, France)
UdG coordinator: Josep Lluís Marzo
EIE- Surveyor Thematic Network: Reference point for electrical and information engineering in Europe. EIE-Surveyor is an ERASMUSthematic network which is funded by the European Commission for a three-year period (October 2005-September 2008). Launched as ananswer to a call for propositions from the European Commission, the aims of the project are globally to reflect and make concrete propositionsfor the problem of mobility of students, readability of contents, and recognition of diploma.
The project is organised as four main tasks, each responsible for an outcome of the project, together with the corresponding activities anddissemination strategy. The coordination between the tasks and the global dissemination strategy is ensured thanks to the managing team ofthe project.
Acting as a reference point for Electrical and Information Engineering in Europe, this project has been proposed and is achieved under theaegis of the EAEEIE (European Association for Education in Electrical and Information Engineering, www.eaeeie.org).
Objectives:
Reflection on generic competences and subject-specific competences in Electrical and Information Engineering (EIE)
Implementation of quality assessment methodologies on some educational resources available in EIE
Reflection and proposition of a methodology for accreditation, in order to enhance comparability and common certification procedures
Proposition of a census of the existing curricula in EIE in Europe, the multinational degrees, and the situation of the implementation of theBologna-process in EIE, at the bachelor, master and PhD levels
Target groups:
Professional engineering associations, Life Long Learning institutions
Students, teachers and learners
Accreditation boards
Main activities:
Application of the TUNING methodology to EIE, to identify competences
Observatory on the degrees available in EIE in Europe, and state of the implementation of the Bologna-process
Quality assessment of some resources in EIE available through internet
Analysis of existing accreditation procedures, proposition of a methodology
Expected outputs:
Update of the monograph on the degrees and international degrees available in EIE in Europe
Guidelines for contents as generic competences and subject-specific competences in EIE
Guideline for a proposition for an accreditation methodology, together with a census on existing accreditation boards and methodology
Mediatheque of selected pedagogical resources available in EIE, with a quality assessment

1716
IIiA RESEARCH REPORT’07
MRTN-CT-2004-505026- Momarnet
Project Type: Marie Curie RTN
Duration: 48 Months
Start: September 2004
Budget: 2.618.044 € (178.421 € UdG)
Partners: Institute de Physique du Globe de Paris - France, Instituto do Mar, Univ. Açores - Portugal, Universidade de Lisboa - Portugal,Stockholm University - Sweden, Max Plank Institute for Marine Microbiology - Germany, Institute Nazionale di Geofisica e Vulcanologia- Italy, National Oceanography Centre - United Kingdom, Cardiff University - United Kingdom, University of Wales - United Kingdom,University of Girona - Spain, Vrije Universiteit Brussels - Belgium, U. de Bretagne Occidentale - France, U. Pierre et Marie Curie - France,Institut Français de Recherche pour l’Exploration de la Mer - France
Coordinator: Mathilde Cannat (IPGP)
Coordinator UdG: Rafael García
UdG Team: Rafel García, Pere Ridao, Olivier Delaunoy
MOMARET. The MOMARnet Marie Curie Research Training Network aims at strengthening the European approach to deep seafloor observatoryscience and technology, by reinforcing the links between fourteen European laboratories in eight countries, by training a multidisciplinary groupof young researchers, and by producing new science and preparing for new seagoing cruises and seafloor experiments. MOMARnet has twobroad research targets:
Understanding the dynamics of slow-spreading ridge hydrothermal vents and their plumbing system (depth of seawater circulation, heatsources, feedback between volcanic, hydrothermal and seismic events)
Understanding deep-seafloor hydrothermal ecosystems, including their distribution, role and variety of organisms, life cycles, effects ofchanges in the hydrothermal outflow (temperature, flow rate, chemistry, etc.)
MOMARnet science will contribute to the implementation of the MOMAR («MOnitoring the Mid-Atlantic Ridge») international project of settingup a multidisciplinary sea-floor observatory for monitoring hydrothermal vent environments along the Mid-Atlantic ridge close to the Azoresarchipelago.
The University of Girona team will develop a semiautomatic software that will produce well navigate mosaics of seafloor images, and establisha data bank of processed seafloor images for the MOMAR hydrothermal sites. These data will be key to manage future MOMAR-relatedexperiments. PhD student will develop software to combine navigation data, images of the ocean floor, seafloor bathymetry and acoustic imagery.Mosaicing techniques (existing and developed within this project) will be applied to build a geo-referenced image mosaic of the Lucky Strikehydrothermal site. This mosaicing software will be developed in a flexible manner, so as to be expanded and applied to 3D-vision systems,video imagery, and high-resolution acoustic systems used on current ROVs and AUVs, and to other configurations that may be used in seafloorsurveys in the future.
EU COST 293
Project Type: EU
Duration: 48 Months
Start: October 2004
Budget: 40.000 €/year
Partners: For a listing of the 42 participating institutions see “People” > “Institutions” at http://www.cost293.org
Coordinator: Arie Koster (University of Warwick, UK)
UdG coordinator: Josep Lluís Marzo
COST Action 293: Graphs and algorithms in communication networks (GRAAL). The main objective of this Action is to elaborate globaland solid advances in the design of communication networks by letting experts and researchers with strong mathematical background meetpeers specialized in communication networks, and share their mutual experience by forming a multidisciplinary scientific co-operation community.
More precisely, it is intended that scientists performing fundamental research in specific mathematical disciplines – including in particulardiscrete mathematics, algorithmics, mathematical optimisation, and distributed computing – will help solving problems proposed by scientistsinvolved in practical research in the area of communication networks, covering broadband packet network design, backbone optical networkdesign, multi-layer networks design, as well as wireless and ad-hoc networks design.
The discussion space will benefit to both scientific communities focusing on theoretical and practical research. On one hand, practical researcherswill benefit from high-level theoretical and formal approaches to design comprehensive and efficient algorithmic-based solutions, as an essentialcomplement to ad-hoc or heuristics-based solutions. As an example, the most recent advances in the design of efficient broadband and backbonenetworks were achieved by merging linear optimization methods/tools with graph theoretic ones. Thus practice-oriented researchers will learnhow to use theoretical results to solve practical problems and improve existing solutions.
For a detailed description see “What is GRAAL?” at http://www.cost293.org/
225997-CP-1-2005-1-FR-ERASMUS-TNPP
Project Type: EU
Duration: 36 Months
Visibility
In computer graphics, Visibility deals with the problem of rendering faster by rendering only the objects of the scene that can be seen.Existing solutions along that line employed in modern day 3D/game-engines are mostly based either on Portals or on Quake style PVS(potentially visible set). While these approaches have been successfully employed in commercial products for years, they nonetheless haveconsiderable drawbacks
The GTP VisibilityLib overcomes these problems with a 2-phase strategy:
A solution which supplies precalculated visibility based on modern visibility research, also suited for outdoor scenes.
A solution which efficiently employs modern day graphic hardware to deliver on-the-fly visibility with minimal overhead.
Illumination
Global Illumination is the field of computer graphics that deals with physically correct illumination. Usually this is associated with stochasticray tracing solutions taking hours to calculate a single picture. The GTP IlluminationLib brings physically correct rendering to the domainof realtime graphics.
Effects that will be possible include: Soft Shadow/Lighteffects, Dynamic Lightsources, Indirect Illumination, Reflections, Realtime Radiosity,High-Quality Materials (Metal...), Cloud Rendering.
Start: October 2005
Partners: Please see http://www.eie-surveyor.org/partners.htm
Coordinator: Jean-Marc THIRIET (Université Henri Poincaré Nancy, France)
UdG coordinator: Josep Lluís Marzo
EIE- Surveyor Thematic Network: Reference point for electrical and information engineering in Europe. EIE-Surveyor is an ERASMUSthematic network which is funded by the European Commission for a three-year period (October 2005-September 2008). Launched as ananswer to a call for propositions from the European Commission, the aims of the project are globally to reflect and make concrete propositionsfor the problem of mobility of students, readability of contents, and recognition of diploma.
The project is organised as four main tasks, each responsible for an outcome of the project, together with the corresponding activities anddissemination strategy. The coordination between the tasks and the global dissemination strategy is ensured thanks to the managing team ofthe project.
Acting as a reference point for Electrical and Information Engineering in Europe, this project has been proposed and is achieved under theaegis of the EAEEIE (European Association for Education in Electrical and Information Engineering, www.eaeeie.org).
Objectives:
Reflection on generic competences and subject-specific competences in Electrical and Information Engineering (EIE)
Implementation of quality assessment methodologies on some educational resources available in EIE
Reflection and proposition of a methodology for accreditation, in order to enhance comparability and common certification procedures
Proposition of a census of the existing curricula in EIE in Europe, the multinational degrees, and the situation of the implementation of theBologna-process in EIE, at the bachelor, master and PhD levels
Target groups:
Professional engineering associations, Life Long Learning institutions
Students, teachers and learners
Accreditation boards
Main activities:
Application of the TUNING methodology to EIE, to identify competences
Observatory on the degrees available in EIE in Europe, and state of the implementation of the Bologna-process
Quality assessment of some resources in EIE available through internet
Analysis of existing accreditation procedures, proposition of a methodology
Expected outputs:
Update of the monograph on the degrees and international degrees available in EIE in Europe
Guidelines for contents as generic competences and subject-specific competences in EIE
Guideline for a proposition for an accreditation methodology, together with a census on existing accreditation boards and methodology
Mediatheque of selected pedagogical resources available in EIE, with a quality assessment
1918
IIiA RESEARCH REPORT’07
TIN2007-67120
Project Type: MEC
Duration: 36 Months
Start: October 2007
Budget: 96.800 € ¤
Partners: University of Girona - Spain
Coordinator: Francesc Xavier Pueyo
UdG Team: Ignacio Martín Campos, Gustavo Ariel Patow, Sergio Gonzalo Besuievsky Glikberg, Albert Mas Baixeras, Carles Bosch Geli,Pau Estalella Fernández, Joan Surrell Saurí
CALBaD. Computer Aided Light Based Design.The project consists of a central body (Illumination simulation) formed by three main blocks,which is oriented to the design (CAD) of active (luminaries, luminaries’ distribution) or passive illumination systems and elements (windows,skylights). The results of the three blocks from this central body will be applied to environments, which will be generated in the urban modellingblock, and will take advantage of the techniques developed in the Interactive visualization block.
Urban modelling. Generation of complex urban and architectural environments with GPU-based solutions. The generation of thoseenvironments will be not only interactive, but also will be based on a parametric description that allows a procedural design.
Illumination Simulation. Usage of the light transport simulation and its interaction with the environment (surfaces and volumes) in differentways:
Artificial Illumination. Creation and development of inverse reflector design software tools that will allow improvements in the productionprocess and the optimization of its luminous efficiency.
Natural Illumination. Development of efficient physically based and evaluation techniques of the natural illumination that will enable itsusage in architectural and urban design projects.
Assisted Illumination. Development of software tools for illumination design from images of the environment to illuminate, or fromdefinitions of desired illumination perceptual objectives.
Interactive Visualization. Design and development of solutions, based on the exploitation of the advantages of modern GPUs, for thetreatment of complex illumination systems and for obtaining high quality images, in a resolution and distance-independent manner.
TEC2006-27633-E
Project Type: MEC
Duration: 12 Months
Start: January 2007
2007/R2
Project Type: Royal Society International Joint Projects
Duration: 12 Months
Start: January 2007
Budget: £9920
Partners: University of London (Queen Mary College), University of Girona
Coordinator: Josep Lluis Marzo
UdG Team: Josep Lluis Marzo, Pere Vilà, Lluis Fàbrega, Eusebi Calle
Intelligent Connection Management for Automatically Switched Optical Networks. The main aim is to perform an initial exploration ofresource provisioning within an optical network, given non-stationary and uncertain traffic demand profiles. In the first year the project willundertake a requirements capture. After this, a review of the state of the art will be carried out to prepare a basic resource managementframework, capitalizing on the particular experiences of the institutions involved. In the second year a rigorous testing regime will be devisedtogether with the selection of suitable comparative performance metrics. Onto this framework various Routing and Wavelength Assignment andRedeployment algorithms can be subsequently evaluated by each institution and results shared. Throughout this time, regular visits will allowfor in-depth collaboration supplemented by web-conferences.
International funding
TIN2007-67982-C02
Project Type: MEC
Duration: 36 Months
Start: October 2007
TIN2007-68066-C04-01
Coordinator: Mateu Sbert
UdG Team: Miquel Feixas Feixas, Francesc Castro Villegas, Roel Elfego Martínez Ramírez, Jaume Rigau Vilalta, Esteban Fermín DelAcebo Peña, Alexandre Brusi Terrades, David Lloret Vilallonga, Meritxell Estebanell Minguell, Pere Cornellà Canals, Josefina FerrésFont, Eulàlia Guiu Puget, Àlex Méndez Feliu, Francisco González García, Ismael García Fernández, Niculau Sunyer Ferrer
Partners:
Budget: 175.000 €
Duration: 36 Months
Project Type: MEC
Start: October 2007
Intelligent Content for virtual reality applications (CONTIENE) - technicsof viewpoint and global ilumination. This project addresses the creation ofintelligent content for multimedia and virtual reality applications. As observed byRoberto Cencione, the explosion in the availability of networked multimedia contentbrings about problems of scale, usability and democratisation of the tool chainthat need to be addressed. Also, the proliferation of data that has been producedby devices is in need of interpretation and integration and they create novel demandson knowledge representation and reasoning. We target here this problem byintroducing on the one hand intelligent tools that are able to produce and presentthe information to the user in a more clever (creating both adaptable and adaptivemultimodal interfaces), and somehow aesthetical way, and on the other hand by borrowing from computer game technology and advancedhardware, that allow for faster and interactive tools. Application areas targeted are computer games, simulation, animation, broadcasting, GIS.Examples of applications aimed at are automatic multiple light positioning for virtual scenes, intelligent search of 3D objects for game setting,best viewpoint for scene and object exploration taking user perceived preferences into account, editing tools for virtual scene automatic contentcreation such as landscapes, buildings, for easier selection of camera and light positioning in an animation by offering the editor an unprecedentedchoice of light and camera paths. We envisage also interactive, memory efficient and visually realistic display of both artificial single 3D objects(manufactured objects, characters, etc.) and complex natural environments (trees, forest, landscape etc.), as well as software tools for user-friendly edition of material and lighting properties for this kind of scenarios, with emphasis on immediate realistic visual feedback.
Ministry of Education and Science (MEC)
Budget: 191.180 € ¤
Partners: UPC, University of Girona - Spain
Coordinator: Antoni Sellarès (UdG)
UdG Team: Immaculada Boada Oliveras, Narcís Coll Arnau, Jordi Regincós Isern, María Ethel Guerrieri, Santiago Díez Donoso, AntoniBardera Reig, Ferran Prados Castro, David Fíguls Massot, Albert Rovira Brugués, Josep Soler Masó, Marta Fort Casadevall, NarcísMadern Leandro, Teresa Paradinas Salsón, Marc Ruiz Altisent
Modelling, visualization, animation and analysis of highly complex 3D environments in interactive virtual reality systems. In aimingto extend the virtual reality experience to ever larger models and scenes, innovative, efficient and scalable solutions are required in many frontsto make it possible. This project intends to push the frontiers of this technology in ways that will allow users to experiment virtual immersionin scenes of previously unmanageable complexity, whilst providing means to bring that experience to more mundane environments and budgets.
To this end, we propose to work on several fronts. On one side, we propose to expand the current state of the art in real time rendering to allowfor the rendering of more detailed complex scenes, while incorporating techniques of physically-based animation and the simulation of crowdsthat interact with the environment and the user to increase the impression of realism and autonomous existence of the virtual worlds. On asecond front, we purport to facilitate the construction of immersed interfaces that will allow for a richer, seamless and intuitive navigation ofthe virtual environments. Yet other two aspects of the problem - at opposed ends of the pipeline - are tackled in two specific packages devotedto the development of new and flexible VR devices, and to the processing of geometry to make it amenable to be manipulated efficiently inthese systems. Finally, we intend to evaluate the results by developing and thoroughly testing demonstration packages built on the technologiesdeveloped, in the areas of medical applications, in cultural heritage and evaluation of emergency situations (for example evacuation of largepublic places).
In a complementary line of research, the same tools developed to deal with extremely complex scenes, including out-of-core handling, will beadapted to a related application scenario: the navigation of very high density medical data. In this area, we will also adapt and apply the GPU-driven techniques for realtime visualisation to the rendering of volume models. Also we intend to continue researching the application ofinformation theory to give efficient solution of registration, segmentation problems and to try inasmuch as possible to achieve automaticgeneration of transference functions to generate images of fused models.
Finally, we will study the representation and analysis of terrains through Triangulated Irregular Networks (TIN) obtained from irregularly-sampledterrain points.
1918
IIiA RESEARCH REPORT’07
TIN2007-67120
Project Type: MEC
Duration: 36 Months
Start: October 2007
Budget: 96.800 € ¤
Partners: University of Girona - Spain
Coordinator: Francesc Xavier Pueyo
UdG Team: Ignacio Martín Campos, Gustavo Ariel Patow, Sergio Gonzalo Besuievsky Glikberg, Albert Mas Baixeras, Carles Bosch Geli,Pau Estalella Fernández, Joan Surrell Saurí
CALBaD. Computer Aided Light Based Design.The project consists of a central body (Illumination simulation) formed by three main blocks,which is oriented to the design (CAD) of active (luminaries, luminaries’ distribution) or passive illumination systems and elements (windows,skylights). The results of the three blocks from this central body will be applied to environments, which will be generated in the urban modellingblock, and will take advantage of the techniques developed in the Interactive visualization block.
Urban modelling. Generation of complex urban and architectural environments with GPU-based solutions. The generation of thoseenvironments will be not only interactive, but also will be based on a parametric description that allows a procedural design.
Illumination Simulation. Usage of the light transport simulation and its interaction with the environment (surfaces and volumes) in differentways:
Artificial Illumination. Creation and development of inverse reflector design software tools that will allow improvements in the productionprocess and the optimization of its luminous efficiency.
Natural Illumination. Development of efficient physically based and evaluation techniques of the natural illumination that will enable itsusage in architectural and urban design projects.
Assisted Illumination. Development of software tools for illumination design from images of the environment to illuminate, or fromdefinitions of desired illumination perceptual objectives.
Interactive Visualization. Design and development of solutions, based on the exploitation of the advantages of modern GPUs, for thetreatment of complex illumination systems and for obtaining high quality images, in a resolution and distance-independent manner.
TEC2006-27633-E
Project Type: MEC
Duration: 12 Months
Start: January 2007
2007/R2
Project Type: Royal Society International Joint Projects
Duration: 12 Months
Start: January 2007
Budget: £9920
Partners: University of London (Queen Mary College), University of Girona
Coordinator: Josep Lluis Marzo
UdG Team: Josep Lluis Marzo, Pere Vilà, Lluis Fàbrega, Eusebi Calle
Intelligent Connection Management for Automatically Switched Optical Networks. The main aim is to perform an initial exploration ofresource provisioning within an optical network, given non-stationary and uncertain traffic demand profiles. In the first year the project willundertake a requirements capture. After this, a review of the state of the art will be carried out to prepare a basic resource managementframework, capitalizing on the particular experiences of the institutions involved. In the second year a rigorous testing regime will be devisedtogether with the selection of suitable comparative performance metrics. Onto this framework various Routing and Wavelength Assignment andRedeployment algorithms can be subsequently evaluated by each institution and results shared. Throughout this time, regular visits will allowfor in-depth collaboration supplemented by web-conferences.
International funding
TIN2007-67982-C02
Project Type: MEC
Duration: 36 Months
Start: October 2007
TIN2007-68066-C04-01
Coordinator: Mateu Sbert
UdG Team: Miquel Feixas Feixas, Francesc Castro Villegas, Roel Elfego Martínez Ramírez, Jaume Rigau Vilalta, Esteban Fermín DelAcebo Peña, Alexandre Brusi Terrades, David Lloret Vilallonga, Meritxell Estebanell Minguell, Pere Cornellà Canals, Josefina FerrésFont, Eulàlia Guiu Puget, Àlex Méndez Feliu, Francisco González García, Ismael García Fernández, Niculau Sunyer Ferrer
Partners:
Budget: 175.000 €
Duration: 36 Months
Project Type: MEC
Start: October 2007
Intelligent Content for virtual reality applications (CONTIENE) - technicsof viewpoint and global ilumination. This project addresses the creation ofintelligent content for multimedia and virtual reality applications. As observed byRoberto Cencione, the explosion in the availability of networked multimedia contentbrings about problems of scale, usability and democratisation of the tool chainthat need to be addressed. Also, the proliferation of data that has been producedby devices is in need of interpretation and integration and they create novel demandson knowledge representation and reasoning. We target here this problem byintroducing on the one hand intelligent tools that are able to produce and presentthe information to the user in a more clever (creating both adaptable and adaptivemultimodal interfaces), and somehow aesthetical way, and on the other hand by borrowing from computer game technology and advancedhardware, that allow for faster and interactive tools. Application areas targeted are computer games, simulation, animation, broadcasting, GIS.Examples of applications aimed at are automatic multiple light positioning for virtual scenes, intelligent search of 3D objects for game setting,best viewpoint for scene and object exploration taking user perceived preferences into account, editing tools for virtual scene automatic contentcreation such as landscapes, buildings, for easier selection of camera and light positioning in an animation by offering the editor an unprecedentedchoice of light and camera paths. We envisage also interactive, memory efficient and visually realistic display of both artificial single 3D objects(manufactured objects, characters, etc.) and complex natural environments (trees, forest, landscape etc.), as well as software tools for user-friendly edition of material and lighting properties for this kind of scenarios, with emphasis on immediate realistic visual feedback.
Ministry of Education and Science (MEC)
Budget: 191.180 € ¤
Partners: UPC, University of Girona - Spain
Coordinator: Antoni Sellarès (UdG)
UdG Team: Immaculada Boada Oliveras, Narcís Coll Arnau, Jordi Regincós Isern, María Ethel Guerrieri, Santiago Díez Donoso, AntoniBardera Reig, Ferran Prados Castro, David Fíguls Massot, Albert Rovira Brugués, Josep Soler Masó, Marta Fort Casadevall, NarcísMadern Leandro, Teresa Paradinas Salsón, Marc Ruiz Altisent
Modelling, visualization, animation and analysis of highly complex 3D environments in interactive virtual reality systems. In aimingto extend the virtual reality experience to ever larger models and scenes, innovative, efficient and scalable solutions are required in many frontsto make it possible. This project intends to push the frontiers of this technology in ways that will allow users to experiment virtual immersionin scenes of previously unmanageable complexity, whilst providing means to bring that experience to more mundane environments and budgets.
To this end, we propose to work on several fronts. On one side, we propose to expand the current state of the art in real time rendering to allowfor the rendering of more detailed complex scenes, while incorporating techniques of physically-based animation and the simulation of crowdsthat interact with the environment and the user to increase the impression of realism and autonomous existence of the virtual worlds. On asecond front, we purport to facilitate the construction of immersed interfaces that will allow for a richer, seamless and intuitive navigation ofthe virtual environments. Yet other two aspects of the problem - at opposed ends of the pipeline - are tackled in two specific packages devotedto the development of new and flexible VR devices, and to the processing of geometry to make it amenable to be manipulated efficiently inthese systems. Finally, we intend to evaluate the results by developing and thoroughly testing demonstration packages built on the technologiesdeveloped, in the areas of medical applications, in cultural heritage and evaluation of emergency situations (for example evacuation of largepublic places).
In a complementary line of research, the same tools developed to deal with extremely complex scenes, including out-of-core handling, will beadapted to a related application scenario: the navigation of very high density medical data. In this area, we will also adapt and apply the GPU-driven techniques for realtime visualisation to the rendering of volume models. Also we intend to continue researching the application ofinformation theory to give efficient solution of registration, segmentation problems and to try inasmuch as possible to achieve automaticgeneration of transference functions to generate images of fused models.
Finally, we will study the representation and analysis of terrains through Triangulated Irregular Networks (TIN) obtained from irregularly-sampledterrain points.
2120
IIiA RESEARCH REPORT’07
PET2006_0833 - 2A
Project Type: MEC - Petri
Duration: 24 Months
Start: January 2007
Budget: 53.354 €
Partners: University og Girona - Spain, PSM S.A.
UdG Team: Josep Lluís de la Rosa
Motor of a 3A System of Customer Loyalty. It is the research and transference of kalman filter and its application to behavior forecast basedon dynamic models of customers and their consumption pattern. This is applied to relational marketing programs for customers in what iscalled the 3A system (Alarms, Analysis, and Actions).
TEC2006-03883
Project Type: MEC
Duration: 36 Months
DPI2006-09370
Project Type: MEC
Duration: 36 Months
Start: October 2006
Budget: 72.600 €
Partners: University of Girona
Coordinator: Joaquim Meléndez
UdG Team: Joaquim Meléndez, Josep Xargayó, Sergio Herraiz, Carles Pous, Josep Dellonder, Bianca Innocenti
Fault Diagnosis of Electrical Distribution Networks Based on Cases and Models. The project proposes a case based reasoning (CBR)strategy to diagnose electric faults. Cases will be built from disturbances, collected by power quality monitoring instruments (events) locatedat substations, and register reporting all the action performed in the network gathered in the network control centre. Setting dependencesbetween waveform attributes and its causes will be used in the definition of cases. Disturbance propagation models and feature extractionstrategies will be analysed in order to represent cases consistently. This analysis will be also useful in the definition of Retrieval, Reuse, Revisionand Retain tasks needed to build the CBR cycle. The Case Based Diagnosis system will be improved in the location step by the integration ofa module to estimate the distance to faults in the distribution network. This module will be based in the estimation of the impedance duringthe fault and the use of algorithmic techniques, involving the model of the line, to estimate an equivalent fault distance. The combination ofthis estimated distance and origin from retrieved cases in presence of a new disturbance will enhance the diagnostic. Finally, an extension ofcases to sequences of them is proposed to predict catastrophic faults. The recognition of a disturbance as part of a one of these sequenceswill be interpreted as a symptom to predict a possible fault.
Development of a prototype to assist fault location in distribution networks. This project aims at developing a prototype tool to assistfault location in distribution networks using the company’s existent knowledge about network and perturbation logs (wave shapes and events)as well as operations and actuations on the network registered in the control centre.
PTR1995-1020-OP
Project Type: MEC
Duration: 12 Months
Start: July 2006
Budget: 57.380 €
Funding: 100%
Partners: University og Girona, Endesa
UdG Team: Joaquim Meléndez, Sergio Herraiz, Carles Pous
PET20006_90822
Project Type: MEC - Petri
Duration: 24 Months
Start: January 2007
Budget: 71.257 €
Partners: University of Girona - Spain, Town Hall Terrassa
UdG Team: Josep Lluís de la Rosa
ISAC Web 2.0: Extension of Cooperative Open Source for Systems of Virtual Citizen Care. iSAC 2.0 is a project designed to expand andupgrade the capacity and quality of care to the public in local governments of any size, with the help of new scientific knowledge in intelligent agentsand wikis, along with the application of modern technologies of Information and Communication on the Internet and search engines. This projectwill explode especially small and medium-sized municipalities, which citizenship approach with all kinds of questions and doubts, usually notrestricted to the local level.
Which innovations are included?
Understand the citizen when he/she uses its own language (extension multilanguage eSAC)
Understand the citizen when he/she speaks in colloquial language, or does not use the correct words usually used by public administration
Identify his/her claim albeit misspellings, semantics, language, grammar, typographical, etc.
Service for citizen in any application, even when his/her questions transcend the responsibility of the directed administration
If the person who makes the claim is identified (using the digital ID, an advanced electronic signature, and so on.), the response can be customizeddepending on the information that it is available, which will increase greatly the efficiency of care.
The intelligent agents will enable us to understand citizens, to know better not only their expectations, habits, culture, needs, interests, butalso how they live and what can be useful for their daily life.
Budget: 10.000 €
Partners: (CTTC) Centre de Transferencia Tecnológica de Catalunya, RedIRIS, Universidad de Alcalá, Universidad Carlos III de Madrid,Universidad de Castilla la Mancha (Albacete), Universitat de Girona, Universidad de Jaen, Universidad de Malaga, Universidad deSevilla, Universidad de Vigo, Universitat Politècnica de Catalunya, Universidad Politécnica de Cartagena, Universidad Politécnica deMadrid, Universidad Politécnica de Valencia, Euskal Herriko Unibertsitatea, Universidad de Extremadura, Universidad Ramón Llull
Coordinator: Josep Lluís Marzo Lázaro
UdG Team: Josep Lluís Marzo Lázaro, Teodor Jové Lagunas, Ramón Fabregat Gesa, Pere Vilà Talleda, Eusebi Calle Ortega, LluísFàbrega Soler, Antonio Bueno Delgado, Anna Urra Fàbregas, Liliana Carrillo Flórez, Fernando Solano Donado, Juan Segovia, JoanPuiggalí Allepuz, David V.H. Mérida, Luis Fernando Caro
Thematic network on the management of IP networks oriented to virtual circuits. This Thematic Network (TN) helps to keep in
contact and facilitate collaborations between the research teams that work in the field of virtual circuit-based communication networks,using in particular the MPLS (Multiprotocol Lavel Switching) and GMPLS (Generalized MPLS) protocols.
This TN is the continuation of a previous 1-year TN: "Red Temática de Gestión de Redes IP Orientadas a Circuitos Virtuales" (TEC2004-21061-E). An additional 7-member research group has joined (URL) and new actions have been planned. The TN is open to new partners.It has grown from 6 research groups (30 researchers in total) in 2003 to the current 19 research groups and more than one hundredresearchers.
Start: October 2006
Budget: 90.750 €
Partners: University of Girona, University of Extremadura, Universidad del Norte (Colombia), University of London, Technical Universityof Denmark
Coordinator: Josep Lluís Marzo
UdG Team: Josep Lluís Marzo, Teodor Jové, Pere Vilà, Lluís Fàbrega, Antonio Bueno, Eusebi Calle, Joan Puggalí, Sònia Oliveras, AnnaUrra, Luis Fernando Caro, Fernando Solano, Jeimy Vélez
Multilayer Mechanisms for Resource allocation and Restorable Routing in GMPLS- based core networks (M2R3). Internet Protocol(IP) networks currently operate over a semi-static transport infrastructure, where the management is concentrated within the IP layer. With theintroduction of Multiprotocol Label Switching (MPLS), an intermediate circuit-switching communication layer is added together with its correspondingmanagement plane. Moreover, the development of optical technologies such as Dense-Wave Division Multiplexing (D-WDM), supporting wavelengthswitching, etc., allow new multilayer networks to be constructed with an unprecedented degree of freedom and flexibility.
Nevertheless, the management of such multilayer networks is more complex and presents potential instabilities. The complexity of the evaluationof the percentage that should be applied at each management layer, i.e. IP, MPLS or optical, presents a significant challenge. We denote as“activation degree” such percentage which will depend on multiple conditions such as: the topology of the network, types of traffic, the loadof the network and the desired degree of protection.
The main objectives of the M2R3 project are the investigation of the following components: quality of service routing mechanisms, routing withprotection and a dynamic resource management. They must be developed and configured according to the required activation degree. Theproject will provide novel tools that will enable network operators to suitably manage their networks in a holistic manner, allowing the varioustechnologies to operate in concert rather than inefficiently or even in conflict with each other.
To the best of our knowledge, the approach we present to resolve this complex management challenge has not been undertaken in otherproposals.

2120
IIiA RESEARCH REPORT’07
PET2006_0833 - 2A
Project Type: MEC - Petri
Duration: 24 Months
Start: January 2007
Budget: 53.354 €
Partners: University og Girona - Spain, PSM S.A.
UdG Team: Josep Lluís de la Rosa
Motor of a 3A System of Customer Loyalty. It is the research and transference of kalman filter and its application to behavior forecast basedon dynamic models of customers and their consumption pattern. This is applied to relational marketing programs for customers in what iscalled the 3A system (Alarms, Analysis, and Actions).
TEC2006-03883
Project Type: MEC
Duration: 36 Months
DPI2006-09370
Project Type: MEC
Duration: 36 Months
Start: October 2006
Budget: 72.600 €
Partners: University of Girona
Coordinator: Joaquim Meléndez
UdG Team: Joaquim Meléndez, Josep Xargayó, Sergio Herraiz, Carles Pous, Josep Dellonder, Bianca Innocenti
Fault Diagnosis of Electrical Distribution Networks Based on Cases and Models. The project proposes a case based reasoning (CBR)strategy to diagnose electric faults. Cases will be built from disturbances, collected by power quality monitoring instruments (events) locatedat substations, and register reporting all the action performed in the network gathered in the network control centre. Setting dependencesbetween waveform attributes and its causes will be used in the definition of cases. Disturbance propagation models and feature extractionstrategies will be analysed in order to represent cases consistently. This analysis will be also useful in the definition of Retrieval, Reuse, Revisionand Retain tasks needed to build the CBR cycle. The Case Based Diagnosis system will be improved in the location step by the integration ofa module to estimate the distance to faults in the distribution network. This module will be based in the estimation of the impedance duringthe fault and the use of algorithmic techniques, involving the model of the line, to estimate an equivalent fault distance. The combination ofthis estimated distance and origin from retrieved cases in presence of a new disturbance will enhance the diagnostic. Finally, an extension ofcases to sequences of them is proposed to predict catastrophic faults. The recognition of a disturbance as part of a one of these sequenceswill be interpreted as a symptom to predict a possible fault.
Development of a prototype to assist fault location in distribution networks. This project aims at developing a prototype tool to assistfault location in distribution networks using the company’s existent knowledge about network and perturbation logs (wave shapes and events)as well as operations and actuations on the network registered in the control centre.
PTR1995-1020-OP
Project Type: MEC
Duration: 12 Months
Start: July 2006
Budget: 57.380 €
Funding: 100%
Partners: University og Girona, Endesa
UdG Team: Joaquim Meléndez, Sergio Herraiz, Carles Pous
PET20006_90822
Project Type: MEC - Petri
Duration: 24 Months
Start: January 2007
Budget: 71.257 €
Partners: University of Girona - Spain, Town Hall Terrassa
UdG Team: Josep Lluís de la Rosa
ISAC Web 2.0: Extension of Cooperative Open Source for Systems of Virtual Citizen Care. iSAC 2.0 is a project designed to expand andupgrade the capacity and quality of care to the public in local governments of any size, with the help of new scientific knowledge in intelligent agentsand wikis, along with the application of modern technologies of Information and Communication on the Internet and search engines. This projectwill explode especially small and medium-sized municipalities, which citizenship approach with all kinds of questions and doubts, usually notrestricted to the local level.
Which innovations are included?
Understand the citizen when he/she uses its own language (extension multilanguage eSAC)
Understand the citizen when he/she speaks in colloquial language, or does not use the correct words usually used by public administration
Identify his/her claim albeit misspellings, semantics, language, grammar, typographical, etc.
Service for citizen in any application, even when his/her questions transcend the responsibility of the directed administration
If the person who makes the claim is identified (using the digital ID, an advanced electronic signature, and so on.), the response can be customizeddepending on the information that it is available, which will increase greatly the efficiency of care.
The intelligent agents will enable us to understand citizens, to know better not only their expectations, habits, culture, needs, interests, butalso how they live and what can be useful for their daily life.
Budget: 10.000 €
Partners: (CTTC) Centre de Transferencia Tecnológica de Catalunya, RedIRIS, Universidad de Alcalá, Universidad Carlos III de Madrid,Universidad de Castilla la Mancha (Albacete), Universitat de Girona, Universidad de Jaen, Universidad de Malaga, Universidad deSevilla, Universidad de Vigo, Universitat Politècnica de Catalunya, Universidad Politécnica de Cartagena, Universidad Politécnica deMadrid, Universidad Politécnica de Valencia, Euskal Herriko Unibertsitatea, Universidad de Extremadura, Universidad Ramón Llull
Coordinator: Josep Lluís Marzo Lázaro
UdG Team: Josep Lluís Marzo Lázaro, Teodor Jové Lagunas, Ramón Fabregat Gesa, Pere Vilà Talleda, Eusebi Calle Ortega, LluísFàbrega Soler, Antonio Bueno Delgado, Anna Urra Fàbregas, Liliana Carrillo Flórez, Fernando Solano Donado, Juan Segovia, JoanPuiggalí Allepuz, David V.H. Mérida, Luis Fernando Caro
Thematic network on the management of IP networks oriented to virtual circuits. This Thematic Network (TN) helps to keep in
contact and facilitate collaborations between the research teams that work in the field of virtual circuit-based communication networks,using in particular the MPLS (Multiprotocol Lavel Switching) and GMPLS (Generalized MPLS) protocols.
This TN is the continuation of a previous 1-year TN: "Red Temática de Gestión de Redes IP Orientadas a Circuitos Virtuales" (TEC2004-21061-E). An additional 7-member research group has joined (URL) and new actions have been planned. The TN is open to new partners.It has grown from 6 research groups (30 researchers in total) in 2003 to the current 19 research groups and more than one hundredresearchers.
Start: October 2006
Budget: 90.750 €
Partners: University of Girona, University of Extremadura, Universidad del Norte (Colombia), University of London, Technical Universityof Denmark
Coordinator: Josep Lluís Marzo
UdG Team: Josep Lluís Marzo, Teodor Jové, Pere Vilà, Lluís Fàbrega, Antonio Bueno, Eusebi Calle, Joan Puggalí, Sònia Oliveras, AnnaUrra, Luis Fernando Caro, Fernando Solano, Jeimy Vélez
Multilayer Mechanisms for Resource allocation and Restorable Routing in GMPLS- based core networks (M2R3). Internet Protocol(IP) networks currently operate over a semi-static transport infrastructure, where the management is concentrated within the IP layer. With theintroduction of Multiprotocol Label Switching (MPLS), an intermediate circuit-switching communication layer is added together with its correspondingmanagement plane. Moreover, the development of optical technologies such as Dense-Wave Division Multiplexing (D-WDM), supporting wavelengthswitching, etc., allow new multilayer networks to be constructed with an unprecedented degree of freedom and flexibility.
Nevertheless, the management of such multilayer networks is more complex and presents potential instabilities. The complexity of the evaluationof the percentage that should be applied at each management layer, i.e. IP, MPLS or optical, presents a significant challenge. We denote as“activation degree” such percentage which will depend on multiple conditions such as: the topology of the network, types of traffic, the loadof the network and the desired degree of protection.
The main objectives of the M2R3 project are the investigation of the following components: quality of service routing mechanisms, routing withprotection and a dynamic resource management. They must be developed and configured according to the required activation degree. Theproject will provide novel tools that will enable network operators to suitably manage their networks in a holistic manner, allowing the varioustechnologies to operate in concert rather than inefficiently or even in conflict with each other.
To the best of our knowledge, the approach we present to resolve this complex management challenge has not been undertaken in otherproposals.

2322
IIiA RESEARCH REPORT’07
TIN2005-08945-C06-03
Project Type: MEC
Duration: 36 Months
Start: December 2005
Budget: 47.600 €
Partners: Universidad Nacional de Educación a Distancia - Spain, University of Girona - Spain, Technical University of Valencia - Spain,University of Castilla la Mancha - Spain, University of Granada - Spain, University Carlos III of Madrid - Spain
Coordinator: Jesús González Boticario (UNED)
UdG coordinator: Ramon Fabregat
UdG Team: Ramón Fabregat Gesa, Eusebi Calle Ortega, Montse Tesouro Cid, David Víctor Hugo Mérida, César Augusto MantillaNavarro, Joan Puiggalí Allepuz, Pau Sanz Hellín, Liliana María Carrillo Flórez, Clara Inés Peña de Carrillo, Carlos Arteaga Rivero
Adaptation based on machine learning, user modelling and planning for complex user-oriented tasks (AdaptaPlan). This projecthas two main objectives. On one side, to analyze the capability of automatically solve tasks that need the integration of planning, machinelearning and interaction with different agents (human or software) to ubiquitously and dynamically adapt to the evolving needs of the context.Thus, we have defined a set of scientific goals related to user modelling, machine learning, planning, multi-agent systems, and ubiquitouscomputing.
On the other side, we would like to benefit from the two-fold experience of the project researchers, both as users and developers, in a specificapplication domain: university education. In this domain, tools that integrate previous techniques are strongly needed. This applied objectiveconsists in the design and development of an architecture that provides services to both students and lecturers in the new education tasksthat are defined by the European Space for Higher Education.
DPI-2005-08668-C03-02 (CHIMPFA)
Project Type: MEC
Duration: 36 Months
Start: December 2005
Budget: 71.400 €
Partners: University of Girona, Technical University of Catalonia (CoDaLab), Technical University of Catalonia (CITCEA)
Coordinator: José Rodellar
Coordinator UdG: Ningsu Luo
UdG Team: Ningsu Luo, Joaquim Armengol, Inès Ferrer, Miquel Compte, Rodolfo Villamizar, Sandra M. Castillo, Jorge E. Florez
Analysis, identification and control of mechatronic systems with hysteresis and friction. Application to piezoelectric and magnetorheologicalactuators. Hysteresis and friction are nonlinearities encountered in various systems in science and engineering areas. This project deals withmechatronic systems equipped with actuators based on smart materials, in particular piezoelectric and magnetorheological. These actuatorsare particularly useful in high performance control applications, due to their high precision and fast response. These advantages can only be
exploited through a fine constructive process and if appropriate theoretical tools are available. Indeed, these actuators have a complex dynamicswith presence of nonlinearities, hysteresis and friction being the most significant.
Due to the high performance required in closed loop, these actuators are prone to the uncertainties in the models and in the operation conditions.Thus it is essential to have appropriate analytical tools for the study and robust identification of their dynamic models. Moreover, the design ofcontrollers needs the use of advanced nonlinear control theories to be able to guarantee rigorously the narrow specifications in terms of stability,precision and robustness.
This project follows three complementary research directions:
Development of new theoretical tools for dynamic analysis, robust identification and control of systems with hysteresis and friction
Construction of prototypes of piezoelectric and magnetorheological actuators integrated in mechatronic systems
Experimental validation in these systems of the developed methods and algorithms
The project will consider two problems: micropositioning control and vibration reduction, which have special practical interest nowadays in areasas automotive industry, mechanics, aeronautics, aerospace and civil engineering, as well as in nanotechnologies.
TIN2004-08065-C2-02
Project Type: MEC
Duration: 36 Months
Start: December 2004
Budget: 146.000 €
Partners: University of Girona - Spain, Technical University of Catalonia - Spain
Coordinator: Antoni Sellarès (UdG)
UdG Team: Joan Antoni Sellarès Chiva, Francesc Xavier Pueyo Sández, Jordi Regincós Isern, Inmaculada Boada Oliveras, Narcís CollArnau, María Ethel Guerrieri, Yago Díez Donoso, Marta Fort Masdevall, Narcís Madern Leandro, David Fíguls Massot, Miquel BofillArasa, Antoni Bardera Reig, Albert Rovira Brugués, José Suy Franch, Josep Soler Masó, José Antonio Méndez Méndez, Isabel PeléezHernández
Advanced interfaces for the transparent interaction with high complexity models in virtual reality environments. The developmentof effective user interfaces for virtual reality environments must face different challenges. Not only must one evolve new paradigms that areadequate in those environments, but they must also be minimally invasive (not to spoil the immersion illusion), and they must rely on anadequate support from the underlying models and model-handling functions, so that the maximum complexity of usable scenes is not seriouslylimited.
This project aims at pushing further the state of the art, developing new techniques at the modelling level (to allow handling models like themost complex currently available, which are too long to fit in memory for a reasonably configured workstation). It also aims at perfecting thestate of the art concerning the interfaces themselves, developing specific techniques adapted to the interaction in those media, and especiallyfor remote collaboration. Moreover, the results will be tested developing specific prototypes to verify the usability of the proposed techniquesfrom the point of view of experts in three application areas, chosen amongst those that may benefit the most from the expected results.
TIN2004-07672-C03-01
Project Type: MEC
Duration: 36 Months
Start: December 2004
Budget: 138.400 €
Partners: University of Girona - Spain, University of Granada - Spain, University of Zaragoza - Spain
Coordinator: Ignacio Martín (UdG)
UdG Team: Gonzalo Besuievsky, Xavier Pueyo, László Neumann, Gustavo Ariel Patow, Joan Surrell, Marc Massot, Mateu Villaret, PauEstalella, Carles Bosch, Ramón Páramo, Juan Roberto Jiménez
Algorithms and Graphical Interfaces for Applications Based on Natural and Artificial Lighting Simulation. This project is aimed atmaking the most of the experience and knowledge in the field of global illumination acquired in previous projects by the participant researchgroups. The goal is to design and develop graphics interfaces applied to sustainable lighting design. In previous projects, the participant groupshave gone more deeply into the development of global illumination algorithms and tools, and they have applied that to solve different problems.Our proposal aims at applying that knowledge to the improvement of lighting design at different levels: from interior lighting design to urbanenvironments. In order to develop usable prototypes it is very important to move away from the simplifications that are usually assumed inglobal illumination computations. These simplifications usually lead to unacceptable results that cannot be used in real-world applications.
The project deals with the problem of simultaneous and efficient use of artificial and natural light in a way that the tools developed allow foran optimum use of natural light resources, and at the same time, to improve the luminaire design process to optimize its performance. Thiswill bring benefits in energy savings and light pollution reduction. Another important issue is the use of optical properties captured from real-world materials that are used in the simulations. This is the only way to guarantee the usability of the results. There are two main aspects toconsider: the collection of real-world data from measurements, and the efficient representation of this data. Finally, due to the high computationalcost of most of the techniques proposed, the project also deals with the use of parallel processing and super-computing technologies.
Two main aspects in the monitoring of the power quality are expected to be improved:
Analysis of disturbances propagation, conciliating the incidence logs (from network control centre) with the disturbances registered in differentlocations of the network (using quality registers)
Location of faults occurred in the distribution. A systematic analysis of waveforms of disturbances using algorithmic methods of fault locationwill allow reducing current location times.
The final purpose is to characterize and systematically evaluate perturbations in the distribution network using previous logs and its reutilizationto perform a fast location and diagnosis of the network distribution faults. Fault location consists in finding an accurate estimation of the zonein which the fault has occurred, using the measures of the waveform of the registered event and the network topology.

2322
IIiA RESEARCH REPORT’07
TIN2005-08945-C06-03
Project Type: MEC
Duration: 36 Months
Start: December 2005
Budget: 47.600 €
Partners: Universidad Nacional de Educación a Distancia - Spain, University of Girona - Spain, Technical University of Valencia - Spain,University of Castilla la Mancha - Spain, University of Granada - Spain, University Carlos III of Madrid - Spain
Coordinator: Jesús González Boticario (UNED)
UdG coordinator: Ramon Fabregat
UdG Team: Ramón Fabregat Gesa, Eusebi Calle Ortega, Montse Tesouro Cid, David Víctor Hugo Mérida, César Augusto MantillaNavarro, Joan Puiggalí Allepuz, Pau Sanz Hellín, Liliana María Carrillo Flórez, Clara Inés Peña de Carrillo, Carlos Arteaga Rivero
Adaptation based on machine learning, user modelling and planning for complex user-oriented tasks (AdaptaPlan). This projecthas two main objectives. On one side, to analyze the capability of automatically solve tasks that need the integration of planning, machinelearning and interaction with different agents (human or software) to ubiquitously and dynamically adapt to the evolving needs of the context.Thus, we have defined a set of scientific goals related to user modelling, machine learning, planning, multi-agent systems, and ubiquitouscomputing.
On the other side, we would like to benefit from the two-fold experience of the project researchers, both as users and developers, in a specificapplication domain: university education. In this domain, tools that integrate previous techniques are strongly needed. This applied objectiveconsists in the design and development of an architecture that provides services to both students and lecturers in the new education tasksthat are defined by the European Space for Higher Education.
DPI-2005-08668-C03-02 (CHIMPFA)
Project Type: MEC
Duration: 36 Months
Start: December 2005
Budget: 71.400 €
Partners: University of Girona, Technical University of Catalonia (CoDaLab), Technical University of Catalonia (CITCEA)
Coordinator: José Rodellar
Coordinator UdG: Ningsu Luo
UdG Team: Ningsu Luo, Joaquim Armengol, Inès Ferrer, Miquel Compte, Rodolfo Villamizar, Sandra M. Castillo, Jorge E. Florez
Analysis, identification and control of mechatronic systems with hysteresis and friction. Application to piezoelectric and magnetorheologicalactuators. Hysteresis and friction are nonlinearities encountered in various systems in science and engineering areas. This project deals withmechatronic systems equipped with actuators based on smart materials, in particular piezoelectric and magnetorheological. These actuatorsare particularly useful in high performance control applications, due to their high precision and fast response. These advantages can only be
exploited through a fine constructive process and if appropriate theoretical tools are available. Indeed, these actuators have a complex dynamicswith presence of nonlinearities, hysteresis and friction being the most significant.
Due to the high performance required in closed loop, these actuators are prone to the uncertainties in the models and in the operation conditions.Thus it is essential to have appropriate analytical tools for the study and robust identification of their dynamic models. Moreover, the design ofcontrollers needs the use of advanced nonlinear control theories to be able to guarantee rigorously the narrow specifications in terms of stability,precision and robustness.
This project follows three complementary research directions:
Development of new theoretical tools for dynamic analysis, robust identification and control of systems with hysteresis and friction
Construction of prototypes of piezoelectric and magnetorheological actuators integrated in mechatronic systems
Experimental validation in these systems of the developed methods and algorithms
The project will consider two problems: micropositioning control and vibration reduction, which have special practical interest nowadays in areasas automotive industry, mechanics, aeronautics, aerospace and civil engineering, as well as in nanotechnologies.
TIN2004-08065-C2-02
Project Type: MEC
Duration: 36 Months
Start: December 2004
Budget: 146.000 €
Partners: University of Girona - Spain, Technical University of Catalonia - Spain
Coordinator: Antoni Sellarès (UdG)
UdG Team: Joan Antoni Sellarès Chiva, Francesc Xavier Pueyo Sández, Jordi Regincós Isern, Inmaculada Boada Oliveras, Narcís CollArnau, María Ethel Guerrieri, Yago Díez Donoso, Marta Fort Masdevall, Narcís Madern Leandro, David Fíguls Massot, Miquel BofillArasa, Antoni Bardera Reig, Albert Rovira Brugués, José Suy Franch, Josep Soler Masó, José Antonio Méndez Méndez, Isabel PeléezHernández
Advanced interfaces for the transparent interaction with high complexity models in virtual reality environments. The developmentof effective user interfaces for virtual reality environments must face different challenges. Not only must one evolve new paradigms that areadequate in those environments, but they must also be minimally invasive (not to spoil the immersion illusion), and they must rely on anadequate support from the underlying models and model-handling functions, so that the maximum complexity of usable scenes is not seriouslylimited.
This project aims at pushing further the state of the art, developing new techniques at the modelling level (to allow handling models like themost complex currently available, which are too long to fit in memory for a reasonably configured workstation). It also aims at perfecting thestate of the art concerning the interfaces themselves, developing specific techniques adapted to the interaction in those media, and especiallyfor remote collaboration. Moreover, the results will be tested developing specific prototypes to verify the usability of the proposed techniquesfrom the point of view of experts in three application areas, chosen amongst those that may benefit the most from the expected results.
TIN2004-07672-C03-01
Project Type: MEC
Duration: 36 Months
Start: December 2004
Budget: 138.400 €
Partners: University of Girona - Spain, University of Granada - Spain, University of Zaragoza - Spain
Coordinator: Ignacio Martín (UdG)
UdG Team: Gonzalo Besuievsky, Xavier Pueyo, László Neumann, Gustavo Ariel Patow, Joan Surrell, Marc Massot, Mateu Villaret, PauEstalella, Carles Bosch, Ramón Páramo, Juan Roberto Jiménez
Algorithms and Graphical Interfaces for Applications Based on Natural and Artificial Lighting Simulation. This project is aimed atmaking the most of the experience and knowledge in the field of global illumination acquired in previous projects by the participant researchgroups. The goal is to design and develop graphics interfaces applied to sustainable lighting design. In previous projects, the participant groupshave gone more deeply into the development of global illumination algorithms and tools, and they have applied that to solve different problems.Our proposal aims at applying that knowledge to the improvement of lighting design at different levels: from interior lighting design to urbanenvironments. In order to develop usable prototypes it is very important to move away from the simplifications that are usually assumed inglobal illumination computations. These simplifications usually lead to unacceptable results that cannot be used in real-world applications.
The project deals with the problem of simultaneous and efficient use of artificial and natural light in a way that the tools developed allow foran optimum use of natural light resources, and at the same time, to improve the luminaire design process to optimize its performance. Thiswill bring benefits in energy savings and light pollution reduction. Another important issue is the use of optical properties captured from real-world materials that are used in the simulations. This is the only way to guarantee the usability of the results. There are two main aspects toconsider: the collection of real-world data from measurements, and the efficient representation of this data. Finally, due to the high computationalcost of most of the techniques proposed, the project also deals with the use of parallel processing and super-computing technologies.
Two main aspects in the monitoring of the power quality are expected to be improved:
Analysis of disturbances propagation, conciliating the incidence logs (from network control centre) with the disturbances registered in differentlocations of the network (using quality registers)
Location of faults occurred in the distribution. A systematic analysis of waveforms of disturbances using algorithmic methods of fault locationwill allow reducing current location times.
The final purpose is to characterize and systematically evaluate perturbations in the distribution network using previous logs and its reutilizationto perform a fast location and diagnosis of the network distribution faults. Fault location consists in finding an accurate estimation of the zonein which the fault has occurred, using the measures of the waveform of the registered event and the network topology.

2524
IIiA RESEARCH REPORT’07
CTM2004-04205
Project Type: MEC
Duration: 36 Months
Start: December 2004
Budget: 166.550 €
Partners: University of Girona - Spain, Institut de Physique du Globe CNRS - France, University of Miami - USA
Coordinator: Rafael García (UdG)
UdG Team: Rafael García, Xavier Cufí, Lluís Pacheco, Ferran Chic, Jordi Ferrer, Martí Fàbregas, Antonio Martorano, Tudor Nicosevici,Carles Matabosch, Xavier Muñoz
Development of a Modular System to Build Georeferenced Photo-mosaics of the Ocean Floor. In this project we propose the developmentof new algorithms and techniques for the automatic construction of ocean floor photomosaics. Photo-mosaics allow the geological analysis ofocean floor morphology and hydrothermalism of selected areas. Likewise, underwater photo-mosaics provide high quality images of specificareas for the study of biological communities.
The works which have been carried out up to now in the field of automatic construction of photo-mosaics have been limited to processing planarenvironments, while most of the regions of interest for the scientific community are located in areas with 3-dimentional relief. For this reason,research and development of new algorithms is a must to enable simultaneous photo-mosaicking and estimation of underwater 3D relief. Onthe other hand, none of the systems described in the literature is able to automatically build large-scale photo-mosaics, due to the accumulateddrift as the mosaic increases its size. In this project we propose to develop new “sensor fusion” strategies to take advantage of all the informationavailable from the on-board sensors to automatically build bigger and more reliable photo-mosaics. Finally, the proposed system should bemodular and flexible, to adapt to a wide diversity of underwater vehicles equipped with various types of sensors. Such a system will allow theanalysis of the temporal evolution of both existing ecosystems and morphology of the underwater terrain.
TIN2004-07451-C03-01
Project Type: MEC
Duration: 36 Months
Start: December 2004
Budget: 131.790 €
Partners: University of Girona - Spain, University Jaume I - Spain, AIJU
Coordinator: Mateu Sbert (UdG)
UdG Team: Mateu Sbert, Miquel Feixas, Jaume Rigau, Esteban del Acebo, Francesc Castro, Roel Martínez, Pere Pau Vázquez, ÀlexMéndez Feliu, Jordi Catà
Improvement and Application of the Game Technology in Virtual Reality and web contents. Cutting-edge technology in the field ofComputer Graphics is currently found in 3D engines for computer games. This is due to the successful combination of research conducted byuniversities with the traditional techniques used in the digital games sector. While this technology was first developed for computer games, itis expanding its scope of application to include other sectors which are less developed as far as realistic rendering is concerned. Virtual Realityand 3D web content are the sectors which show the greatest interest in incorporating the new technologies. Therefore the purpose of this projectis twofold: To continue the research on computer games technologies carried out in the project TIC2001-2416 and to apply the new technologiesto the fields of Virtual Reality and 3D web content.
The objectives of the project are:
Improve videogame technologies in the fields of illumination and geometry
Extend videogames technology to Virtual Reality and 3D Web
Transfer scientific results to industry
INSULAID-2 - DPI2007-66728-C02-02
Project Type: MEC
Duration: 36 Months
Start: October 2007
Budget: 206.063 €
Partners: Technical University of Valencia (UPV), University of California Santa Barbara, Sansum Diabetes Research Institute
Coordinator: Josep Vehí
UdG Team: Joaquim Armengol, Rodolfo Villamizar Mejía, Luis Eduardo Mújica, Pau Herrero Viñas, Remei Calm
Closed loop glucose control in diabetes mellitus 1 and critically ill patients. (INSULAID-2) In the 1990s, it was proved that any improvementin glucose control, leads to a reduction of the risk to develop the chronic complications associated with diabetes. For this reason, euglycaemiahas been established as the control objective for patients with diabetes mellitus 1 (DM1). On the other hand, critically ill patients in the ICU aresubject to a great morbidity and mortality. The latest advances in the knowledge of the pathophysiology of these patients demonstrate howhyperglycaemia may contribute to their clinical evolution. There exists literature that suggests the importance of achieving euglycaemia in thesepatients by means of insulin perfusions to reduce mortality. There is thus a great social and economic interest in efficient glucose control.
It is expected that in four to five years the technology required for an automatic glucose control system will be available, as currently continuousglucose monitoring is a limiting factor. The development of efficient glucose control algorithms, as well as good models of the glucoregulatorysystem and their validation by means of therapeutic criteria, is thus of great importance.
In this project the following global objectives are addressed: (1) the implementation of a clinical study for the collection of experimental datato advance the development of models and their therapeutic validation; (2) the development of advanced control algorithms for closed-loopglucose control in DM1 and critically ill patients. Interval and set-based techniques will be applied to address the problem of intra- and inter-patient variability. Finally, the use of counter-regulatory control signals such as glucagon or glucose, additionally to insulin, will be explored.
INSULAID - DPI2004-07167-C02-02
Project Type: MCYT
Duration: 36 Months
Start: December 2004
Budget: 85.000 €
Partners: Technical University of Valencia, University of California Santa Barbara, Sansum Diabetes Research Institute
Coordinator: Jorge Bondia (UPV)
Coordinator UdG: Josep Vehí
UdG Team: Miguel Ángel Sainz, Arcadi Guitart, Pau Herrero, Raül Fernández, Jian Wan, Gabriela Calderón, Lambert Jorba
Development of a glucemic prediction and insulin dosage-aid system for patients with diabetes mellitus I (INSULAID). Diabetesmellitus type I is a chronic disease of great individual and social impact which affects a great number of people. It produces important damagesin organs like eyes, kidney, heart, etc. leading to blindness, renal insufficiency, heart attack, etc, as well as a significant reduction in lifeexpectancy. These facts are directly related to the glucose levels in blood. The glucemic control in normality levels is the main objective of thetreatment for diabetes mellitus I.
The development of glucemic predictive models will allow a better metabolic control and, thus, reduce the complications of the disease. Themetabolic model of the glucose due to Cobelli is nowadays widely validated in clinic experiences. This model is non-linear and with more than30 parameters to identify. The objectives of this project are the parametric identification of this model for particular patients and the developmentof a training and simulation system for guaranteed prediction of patientís glucemia. Based on it, an insulin dosage-aid system will also bedeveloped. With these two systems the quality of life and life expectancy of the patient will be increased. For it, techniques for the resolutionof constraint satisfaction problems in continuous domains will be used. These ones have experimented great advances due to the intervalmethods and combination with programming and optimisation techniques.
DiSQobolo - DPI2006-15476-C02-02
Project Type: MEC
Duration: 36 Months
Start: October 2006
Budget: 86.394 €
Coordinator: Joaquim Armengol Llobet
UdG Team: Remei Calm, Luis Eduardo Mújica, Esteban Reinaldo Gelso, Maira Alejandra García
Automated fault detection, diagnosis and tolerance in uncertain systems and distributed systems. (DiSQobolo) Fault detection,diagnosis and tolerance in systems allow maintaining the process in a high level of production and reliability. The present techniques showproblems when they are applied to uncertain and distributed systems. For this reason, they are being researched in a very active way to developenew techniques.
2524
IIiA RESEARCH REPORT’07
CTM2004-04205
Project Type: MEC
Duration: 36 Months
Start: December 2004
Budget: 166.550 €
Partners: University of Girona - Spain, Institut de Physique du Globe CNRS - France, University of Miami - USA
Coordinator: Rafael García (UdG)
UdG Team: Rafael García, Xavier Cufí, Lluís Pacheco, Ferran Chic, Jordi Ferrer, Martí Fàbregas, Antonio Martorano, Tudor Nicosevici,Carles Matabosch, Xavier Muñoz
Development of a Modular System to Build Georeferenced Photo-mosaics of the Ocean Floor. In this project we propose the developmentof new algorithms and techniques for the automatic construction of ocean floor photomosaics. Photo-mosaics allow the geological analysis ofocean floor morphology and hydrothermalism of selected areas. Likewise, underwater photo-mosaics provide high quality images of specificareas for the study of biological communities.
The works which have been carried out up to now in the field of automatic construction of photo-mosaics have been limited to processing planarenvironments, while most of the regions of interest for the scientific community are located in areas with 3-dimentional relief. For this reason,research and development of new algorithms is a must to enable simultaneous photo-mosaicking and estimation of underwater 3D relief. Onthe other hand, none of the systems described in the literature is able to automatically build large-scale photo-mosaics, due to the accumulateddrift as the mosaic increases its size. In this project we propose to develop new “sensor fusion” strategies to take advantage of all the informationavailable from the on-board sensors to automatically build bigger and more reliable photo-mosaics. Finally, the proposed system should bemodular and flexible, to adapt to a wide diversity of underwater vehicles equipped with various types of sensors. Such a system will allow theanalysis of the temporal evolution of both existing ecosystems and morphology of the underwater terrain.
TIN2004-07451-C03-01
Project Type: MEC
Duration: 36 Months
Start: December 2004
Budget: 131.790 €
Partners: University of Girona - Spain, University Jaume I - Spain, AIJU
Coordinator: Mateu Sbert (UdG)
UdG Team: Mateu Sbert, Miquel Feixas, Jaume Rigau, Esteban del Acebo, Francesc Castro, Roel Martínez, Pere Pau Vázquez, ÀlexMéndez Feliu, Jordi Catà
Improvement and Application of the Game Technology in Virtual Reality and web contents. Cutting-edge technology in the field ofComputer Graphics is currently found in 3D engines for computer games. This is due to the successful combination of research conducted byuniversities with the traditional techniques used in the digital games sector. While this technology was first developed for computer games, itis expanding its scope of application to include other sectors which are less developed as far as realistic rendering is concerned. Virtual Realityand 3D web content are the sectors which show the greatest interest in incorporating the new technologies. Therefore the purpose of this projectis twofold: To continue the research on computer games technologies carried out in the project TIC2001-2416 and to apply the new technologiesto the fields of Virtual Reality and 3D web content.
The objectives of the project are:
Improve videogame technologies in the fields of illumination and geometry
Extend videogames technology to Virtual Reality and 3D Web
Transfer scientific results to industry
INSULAID-2 - DPI2007-66728-C02-02
Project Type: MEC
Duration: 36 Months
Start: October 2007
Budget: 206.063 €
Partners: Technical University of Valencia (UPV), University of California Santa Barbara, Sansum Diabetes Research Institute
Coordinator: Josep Vehí
UdG Team: Joaquim Armengol, Rodolfo Villamizar Mejía, Luis Eduardo Mújica, Pau Herrero Viñas, Remei Calm
Closed loop glucose control in diabetes mellitus 1 and critically ill patients. (INSULAID-2) In the 1990s, it was proved that any improvementin glucose control, leads to a reduction of the risk to develop the chronic complications associated with diabetes. For this reason, euglycaemiahas been established as the control objective for patients with diabetes mellitus 1 (DM1). On the other hand, critically ill patients in the ICU aresubject to a great morbidity and mortality. The latest advances in the knowledge of the pathophysiology of these patients demonstrate howhyperglycaemia may contribute to their clinical evolution. There exists literature that suggests the importance of achieving euglycaemia in thesepatients by means of insulin perfusions to reduce mortality. There is thus a great social and economic interest in efficient glucose control.
It is expected that in four to five years the technology required for an automatic glucose control system will be available, as currently continuousglucose monitoring is a limiting factor. The development of efficient glucose control algorithms, as well as good models of the glucoregulatorysystem and their validation by means of therapeutic criteria, is thus of great importance.
In this project the following global objectives are addressed: (1) the implementation of a clinical study for the collection of experimental datato advance the development of models and their therapeutic validation; (2) the development of advanced control algorithms for closed-loopglucose control in DM1 and critically ill patients. Interval and set-based techniques will be applied to address the problem of intra- and inter-patient variability. Finally, the use of counter-regulatory control signals such as glucagon or glucose, additionally to insulin, will be explored.
INSULAID - DPI2004-07167-C02-02
Project Type: MCYT
Duration: 36 Months
Start: December 2004
Budget: 85.000 €
Partners: Technical University of Valencia, University of California Santa Barbara, Sansum Diabetes Research Institute
Coordinator: Jorge Bondia (UPV)
Coordinator UdG: Josep Vehí
UdG Team: Miguel Ángel Sainz, Arcadi Guitart, Pau Herrero, Raül Fernández, Jian Wan, Gabriela Calderón, Lambert Jorba
Development of a glucemic prediction and insulin dosage-aid system for patients with diabetes mellitus I (INSULAID). Diabetesmellitus type I is a chronic disease of great individual and social impact which affects a great number of people. It produces important damagesin organs like eyes, kidney, heart, etc. leading to blindness, renal insufficiency, heart attack, etc, as well as a significant reduction in lifeexpectancy. These facts are directly related to the glucose levels in blood. The glucemic control in normality levels is the main objective of thetreatment for diabetes mellitus I.
The development of glucemic predictive models will allow a better metabolic control and, thus, reduce the complications of the disease. Themetabolic model of the glucose due to Cobelli is nowadays widely validated in clinic experiences. This model is non-linear and with more than30 parameters to identify. The objectives of this project are the parametric identification of this model for particular patients and the developmentof a training and simulation system for guaranteed prediction of patientís glucemia. Based on it, an insulin dosage-aid system will also bedeveloped. With these two systems the quality of life and life expectancy of the patient will be increased. For it, techniques for the resolutionof constraint satisfaction problems in continuous domains will be used. These ones have experimented great advances due to the intervalmethods and combination with programming and optimisation techniques.
DiSQobolo - DPI2006-15476-C02-02
Project Type: MEC
Duration: 36 Months
Start: October 2006
Budget: 86.394 €
Coordinator: Joaquim Armengol Llobet
UdG Team: Remei Calm, Luis Eduardo Mújica, Esteban Reinaldo Gelso, Maira Alejandra García
Automated fault detection, diagnosis and tolerance in uncertain systems and distributed systems. (DiSQobolo) Fault detection,diagnosis and tolerance in systems allow maintaining the process in a high level of production and reliability. The present techniques showproblems when they are applied to uncertain and distributed systems. For this reason, they are being researched in a very active way to developenew techniques.

2726
IIiA RESEARCH REPORT’07
DPI2007-66796-C03-02 (AquaVision)
Project Type: MCYT
Duration: 36 Months
Start: October 2007
Budget: 110.000 €
Partners: Universitat de Girona, Universitat Politecnica de Valencia, Universidad Miguel Hernandez
Coordinator: Joaquim Salvi
UdG Team: Xavier Cufí Solé, Xavier Lladó Bardera, Josep Forest Collado, Lluís Pacheco Valls, Antoni Martorano Gomis, Emili HernándezBes, Carles Matabosch Geronès
Vision Systems for computer cartography and underwater aquaculture. In this project we propose the development of new algorithmsand techniques for the automatic construction of marine floor three-dimensional mosaics. Three-dimensional mosaics allow the acquisition ofthe marine floor cartography of selected areas of interest with applications in seashore resource management, environment affectation surveysand aquiculture, since they provide geo-referenced and high quality detailed images to analyse the evolution of the areas of interest.
The works carried out up to now are focused on the automatic construction of photo-mosaics, which are limited to 2D scenarios or assuminga light three-dimensional structure that is approximated to a plane. In contrast, the areas of interest for both the scientific community and thesubmarine prospecting enterprises are located in areas with a major 3D structure. Besides, it is necessary to determine the motion of themarine wildlife and flora to perceive it apart from the marine floor, allowing the construction of precise mosaics and supplying the processedimages for further study of such marine wildlife and flora, which is indeed a very interesting field for both aquiculture and environment affectationenterprises. Finally, none of the systems described in the literature is able to automatically build large-scale three-dimensional mosaics due tothe accumulated drift in the registration. In this project, we propose to develop optical/acoustical data fusion to construct bigger and morereliable three-dimensional mosaics, allowing the analysis of the temporal evolution of marine ecosystems as well as the marine floor morphology.The AQUAVISION project takes advantage of the acoustic data network developed in the integrated project, which aims to localize roughly thevehicle once submerged as well as to transmit the video and data through the acoustic link. This fact improves the hydrodynamics and controlof the vehicle since it is not necessary to carry cables during the mission, especially in standard seashore areas which arise 200m depth.Moreover, the project takes advantage of the underwater vehicles and the underwater research centre available in the Universitat de Girona.
Ministry of Industry, Tourism and Commerce
DPI2005-08922-C02-02
Project Type: MCYT
Duration: 36 Months
Start: December 2005
Budget: 76.400 €
Development of an Intelligent Control System applied to a Sequencing Batch Reactor (SBR) for the removal of Organic Matter,Nitrogen and Phosphorous. This project is focused on the improvement of the control system applied to sequenced batch reactors developedin the project DPI2002-04579. The promising results obtained in the previous project allow to consider the development of a more ambitiouscontrol system to improve the overall process performance and adapt it according to the influent water characteristics. On the one hand, theresearch into the operating conditions will be extended to cover the simultaneous elimination of Organic Matter, Nitrogen and Phosphorous. Inthis way, the necessary knowledge about the relationship between trends of on-line variables and changes in the process will be obtained. Then,from this knowledge, a control system to optimize the duration of each stage will be implemented by means of an on-line detection of criticalpoints. On the other hand, an Intelligent Control Module will be developed and implemented to diagnose the evolution of each batch and tooptimize the schedule in order to minimize the effect of the influent water variability.
DPI2005-09001-C03-01 (Airsub)
Project Type: MCYT
Duration: 36 Months
Start: December 2005
Budget: 158.000 €
Partners: University of Girona, Technical University of Catalonia (UPC), Universitat de les Illes Balears
Coordinator: Joan Batlle
Coordinator UdG: Pere Ridao
UdG Team: Joan Batlle, Pere Ridao, Marc Carreras, David Ribas, Andrés El-Fakdi, Elisabet Batlle, Narcís Falgueras, Josep Cortada,José Luis Muñoz, Ferran Gironès, Elibol Armagan, Antonio Tiano
AIRSUB - Underwater Robotics Industrial Applications. This project proposes the design and development of the necessary technologiesfor the adaptation of the prototypes of the low-cost underwater vehicles GARBI-ROV, GARBI-AUV, URIS and RAO II for their use in shallow waters.First, in collaboration with industry, a catalogue of industrial applications -feasible for low-cost underwater vehicles- will be created. For eachand every of these missions, the adequate scenario will be established, as well as a mission preliminary schedule. Next, the project will befocused in 3 industrial applications:
Dam inspection of hydroelectric plants
Underwater cable and pipe inspection
Inspection of harbours
Every one of these applications will be leaded by one of the 3 subprojects and associated to a market-leader company in its field, and will endwith a practical demonstration. For dam inspection we propose the use of an AUV which could scan the dam wall at the same time it acquiresa video, registering its state. This video will be processed off-line to build a georeferenced photo-mosaic, which will allow the company engineersto gain a global view of the condition of the dam. Analysing this mosaic, successive inspections can be scheduled to evaluate selected areaswith higher resolution, as well as studying its temporal evolution. This inspection technique will be applied both to the grilles of intake and thepenstock gallery. Cable and pipe inspection will be carried out using an AUV that will first submerge and detect the cable. Then, the robot willbe guided by means of the automatic visual tracking system. Along the mission, the AUV will acquire, in a first phase of the project, a largeset of images that will be processed offline (building of mosaics, analysis of an expert, etc.). In a second phase the AUV will filter the acquiredimages, keeping those images which show defects of the cable/pipe and annotating their localization. In this way, the company engineers canconcentrate in the suspicious areas along the inspected section of the cable/pipe. Finally, for the inspection of the breakwaters walls of harboursa ROV will be used. This robot will acquire images which will be used to build a georeferenced mosaic. Fuzzy techniques will be used to localizefaults and anomalies in the moles, such as their temporal degradation.
TIN2004-06354-C02-02
Project Type: MCYT
Duration: 36 Months
Start: December 2004
Budget: 72.000 €
Partners: University of Girona - Spain, Technical University of Valencia - Spain
Coordinator: Federico Barber (UPV)
Coordinator UdG: Beatriz López
UdG Team: Beatriz López, Santiago Esteva, Josep M. Hument, Orlando Contreras, Silvia Suárez, Christian Quintero, Miquel Montaner,Dídac Busquets, Bianca Innocenti
Developing Distributed Computing Techniques for Scheduling. Application to Transport Problems. This project aims at the developmentof distributed computing techniques and multi-agent systems for the resolution of constraint satisfaction and optimisation problems (CSP, COP),these techniques particularly guided towards planning and scheduling processes. So that, it is a coordinated project in which two researchgroups work together with complementary experience on: (i) CSP techniques, distributed CSP, planning and scheduling and (ii) distributed andopen frameworks, multi-agent systems and coordination mechanisms. Furthermore, the integration of planning and scheduling processes isconsidered in the CSP framework. The scientific-technique objectives are very relevant and important allowing us to manage problem typologiesin which traditional techniques are not appropriate. Additionally, in the research project it is sought to apply and evaluate the developed techniquesin evaluation environments broadly contrasted in the scientific community and, mainly, with two concrete and real frameworks based on railtransport and intercity transport in which it is maintained respective agreements of collaboration.
The main objectives of the project are:
Development of scheduling techniques that integrate algorithms from operational research, topological methods and intelligent techniquesoriented towards the efficient treatment of complex scheduling problems.
Extend the applicability of constraint satisfaction techniques with both multi-agent techniques and distributed approaches of satisfaction problems.
Development of an integrated architecture for planning and scheduling.
Application of the architectures and techniques in real environments (train infrastructure planning, crew scheduling for road transport) aswell as in scientific benchmarks (Pacifica).
The most important objectives of this project are to decrease the high false positive and false negative rates, to improve the computationalefficency of fault detection and diagnosis and to automate the identification of components that are the cause of the failures.
These problems for the uncertain systems can be treated using the classical diagnosis approaches: the FDI (Fault Detection and Isolation)community, whose foundations are based on engineering disciplines, such as control theory and statistical decision making, and the DX(Diagnosis) community, whose foundations are derived from the fields of Computer Science and Artificial Intelligence and bridging themethodologies of the FDI and DX Communities (Bridge). Firstly the project proposes this last approach to automate fault diagnosis in thesesystems. The Research Group in Girona has developed the SQualTrack tool for the fault detection of these systems and this project proposesits extension for diagnosis with techniques derived from modal interval analysis. We consider that it is important the coordination with the Quivir(Sevilla and Huelva University) Group that is also studying these same systems using constraint satisfaction techniques, guaranteed methodsand data-mining techniques. Especially, the last techniques can work without the knowledge of the model and can deal with the empiric data(data-based diagnosis). These techniques are being validated in real systems.
In distributed systems, firstly this project addresses the general problems associated with automatic determination of the allocation of sensors toimprove the diagnosticability of the distributed systems. Secondly we will develop a framework for self-diagnosis of distributed systems where wetake into account the persistency of the different models and different improvements based on clustering and distributed constraint satisfaction techniques.
Partners: University of Girona (Lequia Group) - Spain, University of Girona (ExIT Group) - Spain
Coordinator: Maria Dolors Balaguer (Lequia)
Project Manager UdG: Joan Colomer (ExIT)
UdG Team: Carles Pous, Daniel Alexandre Macaya, Fco. Ignacio Gamero, Montse Rubio, Magda Liliana Ruiz

2726
IIiA RESEARCH REPORT’07
DPI2007-66796-C03-02 (AquaVision)
Project Type: MCYT
Duration: 36 Months
Start: October 2007
Budget: 110.000 €
Partners: Universitat de Girona, Universitat Politecnica de Valencia, Universidad Miguel Hernandez
Coordinator: Joaquim Salvi
UdG Team: Xavier Cufí Solé, Xavier Lladó Bardera, Josep Forest Collado, Lluís Pacheco Valls, Antoni Martorano Gomis, Emili HernándezBes, Carles Matabosch Geronès
Vision Systems for computer cartography and underwater aquaculture. In this project we propose the development of new algorithmsand techniques for the automatic construction of marine floor three-dimensional mosaics. Three-dimensional mosaics allow the acquisition ofthe marine floor cartography of selected areas of interest with applications in seashore resource management, environment affectation surveysand aquiculture, since they provide geo-referenced and high quality detailed images to analyse the evolution of the areas of interest.
The works carried out up to now are focused on the automatic construction of photo-mosaics, which are limited to 2D scenarios or assuminga light three-dimensional structure that is approximated to a plane. In contrast, the areas of interest for both the scientific community and thesubmarine prospecting enterprises are located in areas with a major 3D structure. Besides, it is necessary to determine the motion of themarine wildlife and flora to perceive it apart from the marine floor, allowing the construction of precise mosaics and supplying the processedimages for further study of such marine wildlife and flora, which is indeed a very interesting field for both aquiculture and environment affectationenterprises. Finally, none of the systems described in the literature is able to automatically build large-scale three-dimensional mosaics due tothe accumulated drift in the registration. In this project, we propose to develop optical/acoustical data fusion to construct bigger and morereliable three-dimensional mosaics, allowing the analysis of the temporal evolution of marine ecosystems as well as the marine floor morphology.The AQUAVISION project takes advantage of the acoustic data network developed in the integrated project, which aims to localize roughly thevehicle once submerged as well as to transmit the video and data through the acoustic link. This fact improves the hydrodynamics and controlof the vehicle since it is not necessary to carry cables during the mission, especially in standard seashore areas which arise 200m depth.Moreover, the project takes advantage of the underwater vehicles and the underwater research centre available in the Universitat de Girona.
Ministry of Industry, Tourism and Commerce
DPI2005-08922-C02-02
Project Type: MCYT
Duration: 36 Months
Start: December 2005
Budget: 76.400 €
Development of an Intelligent Control System applied to a Sequencing Batch Reactor (SBR) for the removal of Organic Matter,Nitrogen and Phosphorous. This project is focused on the improvement of the control system applied to sequenced batch reactors developedin the project DPI2002-04579. The promising results obtained in the previous project allow to consider the development of a more ambitiouscontrol system to improve the overall process performance and adapt it according to the influent water characteristics. On the one hand, theresearch into the operating conditions will be extended to cover the simultaneous elimination of Organic Matter, Nitrogen and Phosphorous. Inthis way, the necessary knowledge about the relationship between trends of on-line variables and changes in the process will be obtained. Then,from this knowledge, a control system to optimize the duration of each stage will be implemented by means of an on-line detection of criticalpoints. On the other hand, an Intelligent Control Module will be developed and implemented to diagnose the evolution of each batch and tooptimize the schedule in order to minimize the effect of the influent water variability.
DPI2005-09001-C03-01 (Airsub)
Project Type: MCYT
Duration: 36 Months
Start: December 2005
Budget: 158.000 €
Partners: University of Girona, Technical University of Catalonia (UPC), Universitat de les Illes Balears
Coordinator: Joan Batlle
Coordinator UdG: Pere Ridao
UdG Team: Joan Batlle, Pere Ridao, Marc Carreras, David Ribas, Andrés El-Fakdi, Elisabet Batlle, Narcís Falgueras, Josep Cortada,José Luis Muñoz, Ferran Gironès, Elibol Armagan, Antonio Tiano
AIRSUB - Underwater Robotics Industrial Applications. This project proposes the design and development of the necessary technologiesfor the adaptation of the prototypes of the low-cost underwater vehicles GARBI-ROV, GARBI-AUV, URIS and RAO II for their use in shallow waters.First, in collaboration with industry, a catalogue of industrial applications -feasible for low-cost underwater vehicles- will be created. For eachand every of these missions, the adequate scenario will be established, as well as a mission preliminary schedule. Next, the project will befocused in 3 industrial applications:
Dam inspection of hydroelectric plants
Underwater cable and pipe inspection
Inspection of harbours
Every one of these applications will be leaded by one of the 3 subprojects and associated to a market-leader company in its field, and will endwith a practical demonstration. For dam inspection we propose the use of an AUV which could scan the dam wall at the same time it acquiresa video, registering its state. This video will be processed off-line to build a georeferenced photo-mosaic, which will allow the company engineersto gain a global view of the condition of the dam. Analysing this mosaic, successive inspections can be scheduled to evaluate selected areaswith higher resolution, as well as studying its temporal evolution. This inspection technique will be applied both to the grilles of intake and thepenstock gallery. Cable and pipe inspection will be carried out using an AUV that will first submerge and detect the cable. Then, the robot willbe guided by means of the automatic visual tracking system. Along the mission, the AUV will acquire, in a first phase of the project, a largeset of images that will be processed offline (building of mosaics, analysis of an expert, etc.). In a second phase the AUV will filter the acquiredimages, keeping those images which show defects of the cable/pipe and annotating their localization. In this way, the company engineers canconcentrate in the suspicious areas along the inspected section of the cable/pipe. Finally, for the inspection of the breakwaters walls of harboursa ROV will be used. This robot will acquire images which will be used to build a georeferenced mosaic. Fuzzy techniques will be used to localizefaults and anomalies in the moles, such as their temporal degradation.
TIN2004-06354-C02-02
Project Type: MCYT
Duration: 36 Months
Start: December 2004
Budget: 72.000 €
Partners: University of Girona - Spain, Technical University of Valencia - Spain
Coordinator: Federico Barber (UPV)
Coordinator UdG: Beatriz López
UdG Team: Beatriz López, Santiago Esteva, Josep M. Hument, Orlando Contreras, Silvia Suárez, Christian Quintero, Miquel Montaner,Dídac Busquets, Bianca Innocenti
Developing Distributed Computing Techniques for Scheduling. Application to Transport Problems. This project aims at the developmentof distributed computing techniques and multi-agent systems for the resolution of constraint satisfaction and optimisation problems (CSP, COP),these techniques particularly guided towards planning and scheduling processes. So that, it is a coordinated project in which two researchgroups work together with complementary experience on: (i) CSP techniques, distributed CSP, planning and scheduling and (ii) distributed andopen frameworks, multi-agent systems and coordination mechanisms. Furthermore, the integration of planning and scheduling processes isconsidered in the CSP framework. The scientific-technique objectives are very relevant and important allowing us to manage problem typologiesin which traditional techniques are not appropriate. Additionally, in the research project it is sought to apply and evaluate the developed techniquesin evaluation environments broadly contrasted in the scientific community and, mainly, with two concrete and real frameworks based on railtransport and intercity transport in which it is maintained respective agreements of collaboration.
The main objectives of the project are:
Development of scheduling techniques that integrate algorithms from operational research, topological methods and intelligent techniquesoriented towards the efficient treatment of complex scheduling problems.
Extend the applicability of constraint satisfaction techniques with both multi-agent techniques and distributed approaches of satisfaction problems.
Development of an integrated architecture for planning and scheduling.
Application of the architectures and techniques in real environments (train infrastructure planning, crew scheduling for road transport) aswell as in scientific benchmarks (Pacifica).
The most important objectives of this project are to decrease the high false positive and false negative rates, to improve the computationalefficency of fault detection and diagnosis and to automate the identification of components that are the cause of the failures.
These problems for the uncertain systems can be treated using the classical diagnosis approaches: the FDI (Fault Detection and Isolation)community, whose foundations are based on engineering disciplines, such as control theory and statistical decision making, and the DX(Diagnosis) community, whose foundations are derived from the fields of Computer Science and Artificial Intelligence and bridging themethodologies of the FDI and DX Communities (Bridge). Firstly the project proposes this last approach to automate fault diagnosis in thesesystems. The Research Group in Girona has developed the SQualTrack tool for the fault detection of these systems and this project proposesits extension for diagnosis with techniques derived from modal interval analysis. We consider that it is important the coordination with the Quivir(Sevilla and Huelva University) Group that is also studying these same systems using constraint satisfaction techniques, guaranteed methodsand data-mining techniques. Especially, the last techniques can work without the knowledge of the model and can deal with the empiric data(data-based diagnosis). These techniques are being validated in real systems.
In distributed systems, firstly this project addresses the general problems associated with automatic determination of the allocation of sensors toimprove the diagnosticability of the distributed systems. Secondly we will develop a framework for self-diagnosis of distributed systems where wetake into account the persistency of the different models and different improvements based on clustering and distributed constraint satisfaction techniques.
Partners: University of Girona (Lequia Group) - Spain, University of Girona (ExIT Group) - Spain
Coordinator: Maria Dolors Balaguer (Lequia)
Project Manager UdG: Joan Colomer (ExIT)
UdG Team: Carles Pous, Daniel Alexandre Macaya, Fco. Ignacio Gamero, Montse Rubio, Magda Liliana Ruiz
2928
IIiA RESEARCH REPORT’07
DPI2004-07167-C02-02
Project Type: MCYT
Duration: 36 Months
Start: December 2004
Budget: 85.000 €
Partners: Technical University of Valencia - Spain, University of Girona - Spain
Coordinator: Jorge Bondía (UPV)
Coordinator UdG: Josep Vehí
UdG Team: Miguel Angel Sainz, Arcadi Guitart, Pau Herrero, Raül Fernández, Jian Wan, Gabriela Calderón, Lambert Jorba
Development of a glucemic prediction and insulin dosage-aid system for patients with diabetes mellitus I (INSULAID). Diabetesmellitus type I is a chronic disease of great individual and social impact which affects a great number of people. It produces important damagesin organs like eyes, kidney, heart, etc. leading to blindness, renal insufficiency, heart attack, etc, as well as a significant reduction in lifeexpectancy. These facts are directly related to the glucose levels in blood. The glucemic control in normality levels is the main objective of thetreatment for diabetes mellitus I.
The development of glucemic predictive models will allow a better metabolic control and, thus, reduce the complications of the disease. Themetabolic model of the glucose due to Cobelli is nowadays widely validated in clinic experiences. This model is non-linear and with more than30 parameters to identify. The objectives of this project are the parametric identification of this model for particular patients and the developmentof a training and simulation system for guaranteed prediction of patient’s glucemia. Based on it, an insulin dosage-aid system will also bedeveloped. With these two systems the quality of life and life expectancy of the patient will be increased. For it, techniques for the resolutionof constraint satisfaction problems in continuous domains will be used. These ones have experimented great advances due to the intervalmethods and combination with programming and optimisation techniques.
-
Project Type: CeRTAP (Generalitat de Catalunya)
Duration: 36 Months
Start: April 2005
Budget: 321.275,37 € (64.920 €)
Partners: Technical University of Catalonia (UPC), Autonomous University of Barcelona (UAB), Girona Graphics Group (University ofGirona - UdG), VICOROB (University of Girona - UdG), CIM Centre
Coordinator: Pere Brunet (UPC)
Coordinator UdG: Gonzalo Besuievsky
UdG Team: Xavier Pueyo, Gonzalo Besuievsky, Albert Mas
Virtual Prototyping for Architectural Projects. The main goal of this project is the design and development of a system for fast virtualprototyping models in order to provide helpful tools for architects and building designers in early phase of a project. The system has the followingfeatures:
Automatic architectural recognition symbols and vectorization of freehand 2D drawing floor plans
Automatic generation of 3D models from 2D floor plans
It allows edition for basic installation as light sources and furniture with texture edition
Fast lighting visualisation for both natural and artificial light sources
Analysis and inspection of the generated prototype in lower-cost virtual reality platforms: stereoscopic workbench
or standard computer with 3D immersive devices
Interactive re-edition of the model openings with natural lighting visualization
Navigation and inspection tools for remote collaborative work
The whole system is integrated in a single application and it is designed in a way that could be integrated within any standard CAD architecturalplatform as a complement for fast virtual prototyping and validation designs
Catalan Government - CERTAP PVPC
Catalan Government CERTAP PVPC
Project Type: CeRTAP (Generalitat de Catalunya)
Duration: 36 Months
Start: April 2005
Budget: 321.275,37 € (64.920 €)
Partners: Technical University of Catalonia (UPC), Autonomous University of Barcelona (UAB), Girona Graphics Group (University ofGirona - UdG), VICOROB (University of Girona - UdG), CIM Centre
Coordinator: Pere Brunet (UPC)
Coordinator UdG: Xavier Cufí
UdG Team: Xavier Cufí, Joan Martí, Arnau Oliver, Tudor Nicosevici, Elisabet Batlle
Virtual Prototyping for Architectural Projects. The aim of the Project is to create a tool for helping the professionals of building design andarchitects. The base of the work is the experience of the different research groups that belongs to CERTAP in topics such us computer vision,vectorial designs generation from hand made layouts, computer assisted design, illumination and generation of realistic images and virtualreality. As we said before, the final objective of the project has been to obtain an immersive tool for supporting the professionals in the designof buildings. The opinion of the professionals had been considered in all the steps of the development of the project. The main characteristicsof the developed tool are:
2D sketch generation and the 3D model from hand made layouts. At this step, it is necessary tot take into account buildings with differentlevels, stairs and different kinds of ceilings.
Realistic Illumination with ambient simulation (using radiosity), using simulation of natural and artificial light. The application offers thepossibility to visualize the digital model surrounded by images belonging to the reality.
Analysis and inspection of virtual prototypes generated by the system in low cost virtual reality platforms (stereoscopic table) or usingstandard computers equipped with 3D immersive devices.
Tools of remote working that allow the cooperative inspection and analysis between different teams working, using stereoscopic tables, indifferent locations.
The work developed by the VICOROB research group of the UdG has been: The architect provides the application with a hand-made sketch,and then the application generates a full 3D model of the building. Once the 3D model has been generated, the professional has the optionto add texture and simulate illumination (natural and artificial), being able to obtain realistic renderings. On the one hand, the results can beused by the architects to observe and adjust different aspects of the building at pre-project stage and, on the other hand, to help the architectsinteract with the customers. This task includes a sub-application that allows recovering the texture from an object of interest that appears in areal scene. This real texture could be projected over virtual surfaces belonging to the model (walls, roofs …) using the adequate scale.
-
Project Type: Generalitat de Catalunya
Duration: 24 Months
Start: January 2006
Budget: 37.724 €
Partners: Centre CIM, Centre Internacional de Mètodes Numèrics en Enginyeria, Universitat Politècnica de Catalunya, Centre Visióper Computador, Universitat de Girona, Consell Superior d’Investigacions Científiques
Coordinator: Centre CIM
Coordinator UdG: Xavier Cufí
UdG Team: Marc Carreras, Javi Cobos, François Chung, Jordi Ferrer, Jordi Freixenet, Josep Forest, Rafael García, Xavier Lladó, JoanMartí, Robert Martí, Marta Peracaula, Pere Ridao, Joaquim Salvi
Reference network in Advanced Production Techniques. The main objective of the task carried out by VICOROB Research Group in thisproject is developing a set of prototypes of Identification and Positioning Systems. The final result of the project will be the development ofdifferent solutions that allow identifying the different parts that constitute an industrial kit, and obtaining the position and orientation with enoughaccuracy to allow picking these parts using a manipulator or grasping system. Usually, the different parts arrive all together to the inspectionpoint in a disordered bunch, and some parts can present different kinds of deficiencies.
Recognition System: different computer vision algorithms will be developed to identify the different parts that can appear at the inspection point.This system will be able to extract geometric information from the images and compare it to the corresponding CAD models in order to determinewhether the part is faulty or not, or if the visual information obtained is adequate or more additional images are required.
Position and Orientation of the parts: a robust computer vision algorithm will be developed to determine position and orientation of the previouslyrecognized part referred to a determined reference frame.
Catalan Government - XARTAP
2928
IIiA RESEARCH REPORT’07
DPI2004-07167-C02-02
Project Type: MCYT
Duration: 36 Months
Start: December 2004
Budget: 85.000 €
Partners: Technical University of Valencia - Spain, University of Girona - Spain
Coordinator: Jorge Bondía (UPV)
Coordinator UdG: Josep Vehí
UdG Team: Miguel Angel Sainz, Arcadi Guitart, Pau Herrero, Raül Fernández, Jian Wan, Gabriela Calderón, Lambert Jorba
Development of a glucemic prediction and insulin dosage-aid system for patients with diabetes mellitus I (INSULAID). Diabetesmellitus type I is a chronic disease of great individual and social impact which affects a great number of people. It produces important damagesin organs like eyes, kidney, heart, etc. leading to blindness, renal insufficiency, heart attack, etc, as well as a significant reduction in lifeexpectancy. These facts are directly related to the glucose levels in blood. The glucemic control in normality levels is the main objective of thetreatment for diabetes mellitus I.
The development of glucemic predictive models will allow a better metabolic control and, thus, reduce the complications of the disease. Themetabolic model of the glucose due to Cobelli is nowadays widely validated in clinic experiences. This model is non-linear and with more than30 parameters to identify. The objectives of this project are the parametric identification of this model for particular patients and the developmentof a training and simulation system for guaranteed prediction of patient’s glucemia. Based on it, an insulin dosage-aid system will also bedeveloped. With these two systems the quality of life and life expectancy of the patient will be increased. For it, techniques for the resolutionof constraint satisfaction problems in continuous domains will be used. These ones have experimented great advances due to the intervalmethods and combination with programming and optimisation techniques.
-
Project Type: CeRTAP (Generalitat de Catalunya)
Duration: 36 Months
Start: April 2005
Budget: 321.275,37 € (64.920 €)
Partners: Technical University of Catalonia (UPC), Autonomous University of Barcelona (UAB), Girona Graphics Group (University ofGirona - UdG), VICOROB (University of Girona - UdG), CIM Centre
Coordinator: Pere Brunet (UPC)
Coordinator UdG: Gonzalo Besuievsky
UdG Team: Xavier Pueyo, Gonzalo Besuievsky, Albert Mas
Virtual Prototyping for Architectural Projects. The main goal of this project is the design and development of a system for fast virtualprototyping models in order to provide helpful tools for architects and building designers in early phase of a project. The system has the followingfeatures:
Automatic architectural recognition symbols and vectorization of freehand 2D drawing floor plans
Automatic generation of 3D models from 2D floor plans
It allows edition for basic installation as light sources and furniture with texture edition
Fast lighting visualisation for both natural and artificial light sources
Analysis and inspection of the generated prototype in lower-cost virtual reality platforms: stereoscopic workbench
or standard computer with 3D immersive devices
Interactive re-edition of the model openings with natural lighting visualization
Navigation and inspection tools for remote collaborative work
The whole system is integrated in a single application and it is designed in a way that could be integrated within any standard CAD architecturalplatform as a complement for fast virtual prototyping and validation designs
Catalan Government - CERTAP PVPC
Catalan Government CERTAP PVPC
Project Type: CeRTAP (Generalitat de Catalunya)
Duration: 36 Months
Start: April 2005
Budget: 321.275,37 € (64.920 €)
Partners: Technical University of Catalonia (UPC), Autonomous University of Barcelona (UAB), Girona Graphics Group (University ofGirona - UdG), VICOROB (University of Girona - UdG), CIM Centre
Coordinator: Pere Brunet (UPC)
Coordinator UdG: Xavier Cufí
UdG Team: Xavier Cufí, Joan Martí, Arnau Oliver, Tudor Nicosevici, Elisabet Batlle
Virtual Prototyping for Architectural Projects. The aim of the Project is to create a tool for helping the professionals of building design andarchitects. The base of the work is the experience of the different research groups that belongs to CERTAP in topics such us computer vision,vectorial designs generation from hand made layouts, computer assisted design, illumination and generation of realistic images and virtualreality. As we said before, the final objective of the project has been to obtain an immersive tool for supporting the professionals in the designof buildings. The opinion of the professionals had been considered in all the steps of the development of the project. The main characteristicsof the developed tool are:
2D sketch generation and the 3D model from hand made layouts. At this step, it is necessary tot take into account buildings with differentlevels, stairs and different kinds of ceilings.
Realistic Illumination with ambient simulation (using radiosity), using simulation of natural and artificial light. The application offers thepossibility to visualize the digital model surrounded by images belonging to the reality.
Analysis and inspection of virtual prototypes generated by the system in low cost virtual reality platforms (stereoscopic table) or usingstandard computers equipped with 3D immersive devices.
Tools of remote working that allow the cooperative inspection and analysis between different teams working, using stereoscopic tables, indifferent locations.
The work developed by the VICOROB research group of the UdG has been: The architect provides the application with a hand-made sketch,and then the application generates a full 3D model of the building. Once the 3D model has been generated, the professional has the optionto add texture and simulate illumination (natural and artificial), being able to obtain realistic renderings. On the one hand, the results can beused by the architects to observe and adjust different aspects of the building at pre-project stage and, on the other hand, to help the architectsinteract with the customers. This task includes a sub-application that allows recovering the texture from an object of interest that appears in areal scene. This real texture could be projected over virtual surfaces belonging to the model (walls, roofs …) using the adequate scale.
-
Project Type: Generalitat de Catalunya
Duration: 24 Months
Start: January 2006
Budget: 37.724 €
Partners: Centre CIM, Centre Internacional de Mètodes Numèrics en Enginyeria, Universitat Politècnica de Catalunya, Centre Visióper Computador, Universitat de Girona, Consell Superior d’Investigacions Científiques
Coordinator: Centre CIM
Coordinator UdG: Xavier Cufí
UdG Team: Marc Carreras, Javi Cobos, François Chung, Jordi Ferrer, Jordi Freixenet, Josep Forest, Rafael García, Xavier Lladó, JoanMartí, Robert Martí, Marta Peracaula, Pere Ridao, Joaquim Salvi
Reference network in Advanced Production Techniques. The main objective of the task carried out by VICOROB Research Group in thisproject is developing a set of prototypes of Identification and Positioning Systems. The final result of the project will be the development ofdifferent solutions that allow identifying the different parts that constitute an industrial kit, and obtaining the position and orientation with enoughaccuracy to allow picking these parts using a manipulator or grasping system. Usually, the different parts arrive all together to the inspectionpoint in a disordered bunch, and some parts can present different kinds of deficiencies.
Recognition System: different computer vision algorithms will be developed to identify the different parts that can appear at the inspection point.This system will be able to extract geometric information from the images and compare it to the corresponding CAD models in order to determinewhether the part is faulty or not, or if the visual information obtained is adequate or more additional images are required.
Position and Orientation of the parts: a robust computer vision algorithm will be developed to determine position and orientation of the previouslyrecognized part referred to a determined reference frame.
Catalan Government - XARTAP
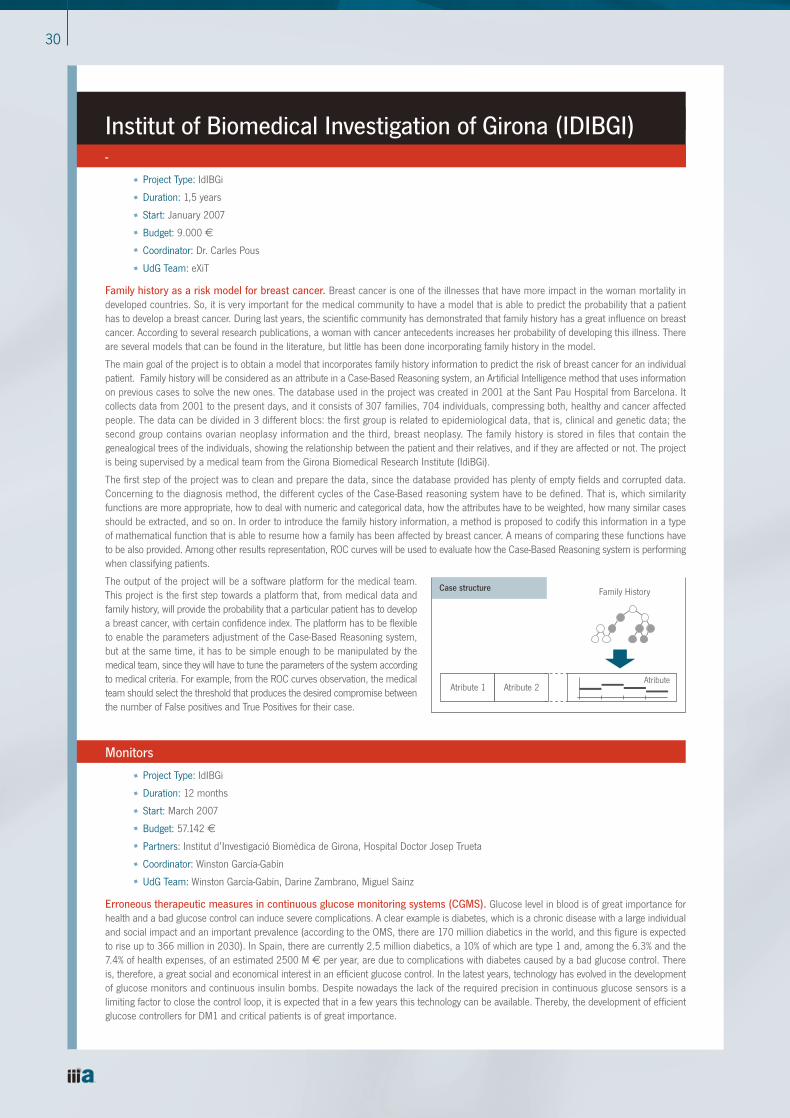
3130
IIiA RESEARCH REPORT’07
-
Project Type: IdIBGi
Duration: 1,5 years
Start: January 2007
Budget: 9.000 €
Coordinator: Dr. Carles Pous
UdG Team: eXiT
Family history as a risk model for breast cancer. Breast cancer is one of the illnesses that have more impact in the woman mortality indeveloped countries. So, it is very important for the medical community to have a model that is able to predict the probability that a patienthas to develop a breast cancer. During last years, the scientific community has demonstrated that family history has a great influence on breastcancer. According to several research publications, a woman with cancer antecedents increases her probability of developing this illness. Thereare several models that can be found in the literature, but little has been done incorporating family history in the model.
The main goal of the project is to obtain a model that incorporates family history information to predict the risk of breast cancer for an individualpatient. Family history will be considered as an attribute in a Case-Based Reasoning system, an Artificial Intelligence method that uses informationon previous cases to solve the new ones. The database used in the project was created in 2001 at the Sant Pau Hospital from Barcelona. Itcollects data from 2001 to the present days, and it consists of 307 families, 704 individuals, compressing both, healthy and cancer affectedpeople. The data can be divided in 3 different blocs: the first group is related to epidemiological data, that is, clinical and genetic data; thesecond group contains ovarian neoplasy information and the third, breast neoplasy. The family history is stored in files that contain thegenealogical trees of the individuals, showing the relationship between the patient and their relatives, and if they are affected or not. The projectis being supervised by a medical team from the Girona Biomedical Research Institute (IdiBGi).
The first step of the project was to clean and prepare the data, since the database provided has plenty of empty fields and corrupted data.Concerning to the diagnosis method, the different cycles of the Case-Based reasoning system have to be defined. That is, which similarityfunctions are more appropriate, how to deal with numeric and categorical data, how the attributes have to be weighted, how many similar casesshould be extracted, and so on. In order to introduce the family history information, a method is proposed to codify this information in a typeof mathematical function that is able to resume how a family has been affected by breast cancer. A means of comparing these functions haveto be also provided. Among other results representation, ROC curves will be used to evaluate how the Case-Based Reasoning system is performingwhen classifying patients.
The output of the project will be a software platform for the medical team.This project is the first step towards a platform that, from medical data andfamily history, will provide the probability that a particular patient has to developa breast cancer, with certain confidence index. The platform has to be flexibleto enable the parameters adjustment of the Case-Based Reasoning system,but at the same time, it has to be simple enough to be manipulated by themedical team, since they will have to tune the parameters of the system accordingto medical criteria. For example, from the ROC curves observation, the medicalteam should select the threshold that produces the desired compromise betweenthe number of False positives and True Positives for their case.
Institut of Biomedical Investigation of Girona (IDIBGI)
Case structure
Atribute 1 Atribute 2
Family History
Atribute
Crítics
Project Type: IdIBGi
Duration: 12 months
Start: September 2006
Budget: 19.952 €
Partners: Institut d’Investigació Biomèdica de Girona, Hospital Doctor Josep Trueta
Coordinator: Josep Vehí
UdG Team: Remei Calm, Joaquim Armengol, Sandra Castillo, Alexandra Oliveros, Winston García-Gabín, Darine Zambrano, MiguelSainz
Critical ill patient glycemia control: algorithm development and clinical trials protocol definition. Critically ill patients at theIntensive Care Units (ICU) are subject to a great morbidity and mortality. Last advances in the knowledge of the pathophysiology of thesepatients demonstrate how hyperglycaemia may contribute, directly or indirectly on their clinical evolution. There exists literature [Pittas04,VanderBerghe04] which suggests the importance of maintaining euglycaemia in these patients by means of insulin perfusions to reducemortality. However, so far it has not been possible to demonstrate in an absolute and irrefutable manner if glucose normalizationcontributes to a better clinical evolution of these patients, given the impossibility of normalizing glucose levels, even in studies speciallydesigned for that purpose. A recent study [DIGAMI97, Hirsch04, Malmberg05] has failed in the assay to demonstrate the improvementof mortality in acute coronary patients by means of endogenous insulin treatment due to the fact that glucose control improvement wasnot possible with respect to the control group. This illustrates the difficulties found by professionals in the daily clinical practice to achievecontrol goals even in a controlled ambient as the hospital, with controlled meals and mealtime and absence of factors such as physicalexercise.
Currently, higher insulin levels (140 mg/dl) are being considered in order to avoid risks of severe hypoglycemia.
Glicemia
Project Type: IdIBGi
Duration: 12 months
Start: November 2006
Budget: 66.041,80 €
Partners: Institut d’Investigació Biomèdica de Girona, Hospital Doctor Josep Trueta
Coordinator: Josep Vehí
UdG Team: Miguel Angel Sainz, Winston García-Gabín, Pau Herrero, César Palerm, Sandra Castillo
Identification of prediction models of the glucoregulatory system for type 1 Diabetes Mellitus patients. The main goal ofthis project is identify and validate prediction models of the glucoregulatory system individually. That is, a simple model, thoughpersonal, will exist for each individual, and this will facilitate the prediction of the glucose variation of this person in few hours afterfood ingestion. This project is framed in the glycemia control of diabetes type 1 which the UdG has been pursuing for the last 3 yearsin collaboration with the UPV and Dr Ricartís group, from the IdIBGI.
In this project it is foreseen to obtain a model used for the prediction and also for clinical trials, after three years of collaborationwith the IdBGI and Hospital Josep Trueta, having already accepted our clinical essays protocol.
The identification and validation of these models is not as simple as it may seem due to several problems like: Inter and intra-individuals variability, very complex models (simplified models must be defined in order to allow a more precise prediction), difficultiesto collect samples every three minutes for 3 days of testing, current CGMS are too imprecise.
Knowledge of the effect of a meal in patientsí glycaemia needs further research, being a especially relevant perturbation in anyglucose control system. A better knowledge of this effect will yield, from the control point of view, better performance by using feedforward schemes. Thus, improvement of currently available models is addressed, including gastric emptying, digestion and intestinalabsorption of carbohydrates. Since it is not possible to measure exogenous glucose flow, these models will be validated from post-prandial glucose experimental data obtained in Objective 1. Estimation of nutritional contents of a meal from qualitative descriptionswill also be addressed.
As a counterpart, the benefits directly obtained with these models are clear: Better glucose metabolic control, detection of hyperand hypo glycemia as well as reduction of severe disease consequences for critical ill patients.
Monitors
Project Type: IdIBGi
Duration: 12 months
Start: March 2007
Budget: 57.142 €
Partners: Institut d’Investigació Biomèdica de Girona, Hospital Doctor Josep Trueta
Coordinator: Winston García-Gabín
UdG Team: Winston García-Gabín, Darine Zambrano, Miguel Sainz
Erroneous therapeutic measures in continuous glucose monitoring systems (CGMS). Glucose level in blood is of great importance forhealth and a bad glucose control can induce severe complications. A clear example is diabetes, which is a chronic disease with a large individualand social impact and an important prevalence (according to the OMS, there are 170 million diabetics in the world, and this figure is expectedto rise up to 366 million in 2030). In Spain, there are currently 2.5 million diabetics, a 10% of which are type 1 and, among the 6.3% and the7.4% of health expenses, of an estimated 2500 M € per year, are due to complications with diabetes caused by a bad glucose control. Thereis, therefore, a great social and economical interest in an efficient glucose control. In the latest years, technology has evolved in the developmentof glucose monitors and continuous insulin bombs. Despite nowadays the lack of the required precision in continuous glucose sensors is alimiting factor to close the control loop, it is expected that in a few years this technology can be available. Thereby, the development of efficientglucose controllers for DM1 and critical patients is of great importance.

3130
IIiA RESEARCH REPORT’07
-
Project Type: IdIBGi
Duration: 1,5 years
Start: January 2007
Budget: 9.000 €
Coordinator: Dr. Carles Pous
UdG Team: eXiT
Family history as a risk model for breast cancer. Breast cancer is one of the illnesses that have more impact in the woman mortality indeveloped countries. So, it is very important for the medical community to have a model that is able to predict the probability that a patienthas to develop a breast cancer. During last years, the scientific community has demonstrated that family history has a great influence on breastcancer. According to several research publications, a woman with cancer antecedents increases her probability of developing this illness. Thereare several models that can be found in the literature, but little has been done incorporating family history in the model.
The main goal of the project is to obtain a model that incorporates family history information to predict the risk of breast cancer for an individualpatient. Family history will be considered as an attribute in a Case-Based Reasoning system, an Artificial Intelligence method that uses informationon previous cases to solve the new ones. The database used in the project was created in 2001 at the Sant Pau Hospital from Barcelona. Itcollects data from 2001 to the present days, and it consists of 307 families, 704 individuals, compressing both, healthy and cancer affectedpeople. The data can be divided in 3 different blocs: the first group is related to epidemiological data, that is, clinical and genetic data; thesecond group contains ovarian neoplasy information and the third, breast neoplasy. The family history is stored in files that contain thegenealogical trees of the individuals, showing the relationship between the patient and their relatives, and if they are affected or not. The projectis being supervised by a medical team from the Girona Biomedical Research Institute (IdiBGi).
The first step of the project was to clean and prepare the data, since the database provided has plenty of empty fields and corrupted data.Concerning to the diagnosis method, the different cycles of the Case-Based reasoning system have to be defined. That is, which similarityfunctions are more appropriate, how to deal with numeric and categorical data, how the attributes have to be weighted, how many similar casesshould be extracted, and so on. In order to introduce the family history information, a method is proposed to codify this information in a typeof mathematical function that is able to resume how a family has been affected by breast cancer. A means of comparing these functions haveto be also provided. Among other results representation, ROC curves will be used to evaluate how the Case-Based Reasoning system is performingwhen classifying patients.
The output of the project will be a software platform for the medical team.This project is the first step towards a platform that, from medical data andfamily history, will provide the probability that a particular patient has to developa breast cancer, with certain confidence index. The platform has to be flexibleto enable the parameters adjustment of the Case-Based Reasoning system,but at the same time, it has to be simple enough to be manipulated by themedical team, since they will have to tune the parameters of the system accordingto medical criteria. For example, from the ROC curves observation, the medicalteam should select the threshold that produces the desired compromise betweenthe number of False positives and True Positives for their case.
Institut of Biomedical Investigation of Girona (IDIBGI)
Case structure
Atribute 1 Atribute 2
Family History
Atribute
Crítics
Project Type: IdIBGi
Duration: 12 months
Start: September 2006
Budget: 19.952 €
Partners: Institut d’Investigació Biomèdica de Girona, Hospital Doctor Josep Trueta
Coordinator: Josep Vehí
UdG Team: Remei Calm, Joaquim Armengol, Sandra Castillo, Alexandra Oliveros, Winston García-Gabín, Darine Zambrano, MiguelSainz
Critical ill patient glycemia control: algorithm development and clinical trials protocol definition. Critically ill patients at theIntensive Care Units (ICU) are subject to a great morbidity and mortality. Last advances in the knowledge of the pathophysiology of thesepatients demonstrate how hyperglycaemia may contribute, directly or indirectly on their clinical evolution. There exists literature [Pittas04,VanderBerghe04] which suggests the importance of maintaining euglycaemia in these patients by means of insulin perfusions to reducemortality. However, so far it has not been possible to demonstrate in an absolute and irrefutable manner if glucose normalizationcontributes to a better clinical evolution of these patients, given the impossibility of normalizing glucose levels, even in studies speciallydesigned for that purpose. A recent study [DIGAMI97, Hirsch04, Malmberg05] has failed in the assay to demonstrate the improvementof mortality in acute coronary patients by means of endogenous insulin treatment due to the fact that glucose control improvement wasnot possible with respect to the control group. This illustrates the difficulties found by professionals in the daily clinical practice to achievecontrol goals even in a controlled ambient as the hospital, with controlled meals and mealtime and absence of factors such as physicalexercise.
Currently, higher insulin levels (140 mg/dl) are being considered in order to avoid risks of severe hypoglycemia.
Glicemia
Project Type: IdIBGi
Duration: 12 months
Start: November 2006
Budget: 66.041,80 €
Partners: Institut d’Investigació Biomèdica de Girona, Hospital Doctor Josep Trueta
Coordinator: Josep Vehí
UdG Team: Miguel Angel Sainz, Winston García-Gabín, Pau Herrero, César Palerm, Sandra Castillo
Identification of prediction models of the glucoregulatory system for type 1 Diabetes Mellitus patients. The main goal ofthis project is identify and validate prediction models of the glucoregulatory system individually. That is, a simple model, thoughpersonal, will exist for each individual, and this will facilitate the prediction of the glucose variation of this person in few hours afterfood ingestion. This project is framed in the glycemia control of diabetes type 1 which the UdG has been pursuing for the last 3 yearsin collaboration with the UPV and Dr Ricartís group, from the IdIBGI.
In this project it is foreseen to obtain a model used for the prediction and also for clinical trials, after three years of collaborationwith the IdBGI and Hospital Josep Trueta, having already accepted our clinical essays protocol.
The identification and validation of these models is not as simple as it may seem due to several problems like: Inter and intra-individuals variability, very complex models (simplified models must be defined in order to allow a more precise prediction), difficultiesto collect samples every three minutes for 3 days of testing, current CGMS are too imprecise.
Knowledge of the effect of a meal in patientsí glycaemia needs further research, being a especially relevant perturbation in anyglucose control system. A better knowledge of this effect will yield, from the control point of view, better performance by using feedforward schemes. Thus, improvement of currently available models is addressed, including gastric emptying, digestion and intestinalabsorption of carbohydrates. Since it is not possible to measure exogenous glucose flow, these models will be validated from post-prandial glucose experimental data obtained in Objective 1. Estimation of nutritional contents of a meal from qualitative descriptionswill also be addressed.
As a counterpart, the benefits directly obtained with these models are clear: Better glucose metabolic control, detection of hyperand hypo glycemia as well as reduction of severe disease consequences for critical ill patients.
Monitors
Project Type: IdIBGi
Duration: 12 months
Start: March 2007
Budget: 57.142 €
Partners: Institut d’Investigació Biomèdica de Girona, Hospital Doctor Josep Trueta
Coordinator: Winston García-Gabín
UdG Team: Winston García-Gabín, Darine Zambrano, Miguel Sainz
Erroneous therapeutic measures in continuous glucose monitoring systems (CGMS). Glucose level in blood is of great importance forhealth and a bad glucose control can induce severe complications. A clear example is diabetes, which is a chronic disease with a large individualand social impact and an important prevalence (according to the OMS, there are 170 million diabetics in the world, and this figure is expectedto rise up to 366 million in 2030). In Spain, there are currently 2.5 million diabetics, a 10% of which are type 1 and, among the 6.3% and the7.4% of health expenses, of an estimated 2500 M € per year, are due to complications with diabetes caused by a bad glucose control. Thereis, therefore, a great social and economical interest in an efficient glucose control. In the latest years, technology has evolved in the developmentof glucose monitors and continuous insulin bombs. Despite nowadays the lack of the required precision in continuous glucose sensors is alimiting factor to close the control loop, it is expected that in a few years this technology can be available. Thereby, the development of efficientglucose controllers for DM1 and critical patients is of great importance.
Agents Research Laboratory (ArLab)
Statistical control of parameters in a production process
Quality supervision systems: qualitative representationof trends in a process, qualitative analysis of situations…
Study of prediction models to recognise the demand ofmarket
ISAC: conceptual design, FAQs elaboration, adaptationof the technological product, application of the service…
Software for optimization of production process
Costumer segmentation programs
Low cost industrial supervision products
Broadband Communications and Distributed Systems(BCDS)
Telemedicine: easy applications for online rehabilitationand diagnosis
Telemonitorization: easy application for communicatingwith handicapped people
Computer Graphics and Image (GiLab)
Medical images
Scientific visualization
Architecture
Entertainment: digital cinema, digital TV, animation,simulation, videogames, virtual reality…
Computer Vision and Robotics (VICOROB)
Reconstruction of three-dimensional information of objectsfrom systems of vision
Visual Maps from multiple images
Processing and analysis of images with applications inthe medical area
Underwater Robotics
Industrial Computer Science: automation, communications,industrial robotics, intelligent perception and embeddedsystems
Control Engineering and Intelligent Systems (EXIT)
Assigning providers to consumers
Development of strategies for intelligent process monitoring(fault detection and diagnosis)
Automatic diagnosis of sags and fault location indistribution networks
Statistical monitoring of waste water treatment plants
On-line monitoring of pressures to predict instabilities
Off-line assessment of moulds
Medical diagnosis
Geometry and Computer Graphics (GGG)
Lamps design: car lights and conventional lamps
Design of architecture and urban structures to use morenatural light instead of artificial light
Images for simulators
Entertainment: videogames, virtual reality…
Computational geometry
Modelling, Indentification and Control Engineering(MICELab)
Industrial process supervision and control
Damage assessment in structures
Mechatronics and mechatronic systems
Process control engineering
Biomedical engineering
Innovative solutions for enterprises
33
TechnologyTransfer
32
IIiA RESEARCH REPORT’07
Some examples of contracts with enterprises
Contract Iberespacio
Project Type: Contract Iberespacio
Duration: 6 months
Start: Feb 2007
Budget: 5.985 €
Coordinator: Joaquim Meléndez
UdG Team: EXIT
Fault detection and diagnosis of ARIANE flights. After each Ariane mission, data flight analysis is intended to prevent not only the upcomingfailures but also even the slightest drop of launcher performances. In this work, the benefits of using Principal Component Analysis (PCA) toachieve this goal have been evaluated. PCA method has confirmed, in a simple example, its capacity for fault detection and location. It is shownthat this tool allows a more obvious detection of singularities. It also supports the choice of the minimum set of sensors of calculated data tobe evaluated in the systematic analysis. Principal Component Analysis has been tested and compared against other fault detection and diagnosisprinciples with excellent results.
Contract ENDESA DISTRIBUTION
Project Type: Contract ENDESA DISTRIBUCION
Duration: 1 year
Start: December 2007
Budget: 21.800 €
Coordinator: Joaquim Meléndez
UdG Team: EXIT
Power quality monitoring and improvements of fault location in distribution networks. Data mining principles are being used in thisproject to assist power quality monitoring under different perspectives. Automatic analysis of sags based on extraction of significant attributeshas been applied to discriminate between normal and abnormal situations and determine the origin of disturbances upstream or downstreamof the measuring point.
Waveforms of voltages and currents have been used to estimate the location of faults in the distribution system. Registers are provided by powerquality monitors and automatically processed by the developed software to estimate the faulty point. A topological analysis of the network ismade to estimate the faulty point based on a consistency test between the impedance measured and the theoretical impedance of line at eachnode.
Finally sequences of disturbances are analysed together to predict possible fault situations. Visual representation of sequences of disturbanceshas been merged with data mining principles with this purpose.
Contract CITY HALL TERRASSA
Project Type: City Hall Terrassa
Budget: 64.500 €
Participants: City Hall Terrassa, City Hall Girona, Agents Inspired, University of Girona
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
iSAC – Sistem for Citizen Services. iSAC is the Information & Referral System in the web. This system is quite unique in Europe, as thesingle open source system that is able to understand open questions of citizens, and find the precise answer inside public administrations.
Contract STRATEGIC ATTENTION MANAGEMENT S.L.
Project Type: Contract Strategic Attention Management S.L.
Budget: 11500 €
Participants: City HallTerrassa, City Hall Girona, Agents Inspired, University of Girona
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
Technological Development of technology in open source search engines QA for ISAC. This is about POP2.0, the core engine forsearching natural language queries inside I&R databases.
Agents Research Laboratory (ArLab)
Statistical control of parameters in a production process
Quality supervision systems: qualitative representationof trends in a process, qualitative analysis of situations…
Study of prediction models to recognise the demand ofmarket
ISAC: conceptual design, FAQs elaboration, adaptationof the technological product, application of the service…
Software for optimization of production process
Costumer segmentation programs
Low cost industrial supervision products
Broadband Communications and Distributed Systems(BCDS)
Telemedicine: easy applications for online rehabilitationand diagnosis
Telemonitorization: easy application for communicatingwith handicapped people
Computer Graphics and Image (GiLab)
Medical images
Scientific visualization
Architecture
Entertainment: digital cinema, digital TV, animation,simulation, videogames, virtual reality…
Computer Vision and Robotics (VICOROB)
Reconstruction of three-dimensional information of objectsfrom systems of vision
Visual Maps from multiple images
Processing and analysis of images with applications inthe medical area
Underwater Robotics
Industrial Computer Science: automation, communications,industrial robotics, intelligent perception and embeddedsystems
Control Engineering and Intelligent Systems (EXIT)
Assigning providers to consumers
Development of strategies for intelligent process monitoring(fault detection and diagnosis)
Automatic diagnosis of sags and fault location indistribution networks
Statistical monitoring of waste water treatment plants
On-line monitoring of pressures to predict instabilities
Off-line assessment of moulds
Medical diagnosis
Geometry and Computer Graphics (GGG)
Lamps design: car lights and conventional lamps
Design of architecture and urban structures to use morenatural light instead of artificial light
Images for simulators
Entertainment: videogames, virtual reality…
Computational geometry
Modelling, Indentification and Control Engineering(MICELab)
Industrial process supervision and control
Damage assessment in structures
Mechatronics and mechatronic systems
Process control engineering
Biomedical engineering
Innovative solutions for enterprises
33
TechnologyTransfer
32
IIiA RESEARCH REPORT’07
Some examples of contracts with enterprises
Contract Iberespacio
Project Type: Contract Iberespacio
Duration: 6 months
Start: Feb 2007
Budget: 5.985 €
Coordinator: Joaquim Meléndez
UdG Team: EXIT
Fault detection and diagnosis of ARIANE flights. After each Ariane mission, data flight analysis is intended to prevent not only the upcomingfailures but also even the slightest drop of launcher performances. In this work, the benefits of using Principal Component Analysis (PCA) toachieve this goal have been evaluated. PCA method has confirmed, in a simple example, its capacity for fault detection and location. It is shownthat this tool allows a more obvious detection of singularities. It also supports the choice of the minimum set of sensors of calculated data tobe evaluated in the systematic analysis. Principal Component Analysis has been tested and compared against other fault detection and diagnosisprinciples with excellent results.
Contract ENDESA DISTRIBUTION
Project Type: Contract ENDESA DISTRIBUCION
Duration: 1 year
Start: December 2007
Budget: 21.800 €
Coordinator: Joaquim Meléndez
UdG Team: EXIT
Power quality monitoring and improvements of fault location in distribution networks. Data mining principles are being used in thisproject to assist power quality monitoring under different perspectives. Automatic analysis of sags based on extraction of significant attributeshas been applied to discriminate between normal and abnormal situations and determine the origin of disturbances upstream or downstreamof the measuring point.
Waveforms of voltages and currents have been used to estimate the location of faults in the distribution system. Registers are provided by powerquality monitors and automatically processed by the developed software to estimate the faulty point. A topological analysis of the network ismade to estimate the faulty point based on a consistency test between the impedance measured and the theoretical impedance of line at eachnode.
Finally sequences of disturbances are analysed together to predict possible fault situations. Visual representation of sequences of disturbanceshas been merged with data mining principles with this purpose.
Contract CITY HALL TERRASSA
Project Type: City Hall Terrassa
Budget: 64.500 €
Participants: City Hall Terrassa, City Hall Girona, Agents Inspired, University of Girona
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
iSAC – Sistem for Citizen Services. iSAC is the Information & Referral System in the web. This system is quite unique in Europe, as thesingle open source system that is able to understand open questions of citizens, and find the precise answer inside public administrations.
Contract STRATEGIC ATTENTION MANAGEMENT S.L.
Project Type: Contract Strategic Attention Management S.L.
Budget: 11500 €
Participants: City HallTerrassa, City Hall Girona, Agents Inspired, University of Girona
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
Technological Development of technology in open source search engines QA for ISAC. This is about POP2.0, the core engine forsearching natural language queries inside I&R databases.

3534
IIiA RESEARCH REPORT’07
CONTRACT Consell Comarcal del Pla de l’Estany
Project Type: Contract Consell Comarcal del Pla de l’Estany
Budget: 282.000 €
Participants: University of Girona, Consell Comarcal del Pla de l’Estany
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
Development of open management through DTT. This is the development of the open administration through TV, using the TDT technology.This is called T-Administration, and research is about improving usability for I&R systems, synergically with iSAC.
Contract CITY HALL GIRONA
Project Type: Contract City Hall Girona
Duration: -
Start: -
Budget: 60.000 €¤
Participants: University of Girona, City Hall Girona
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
Collaboration between the University of Girona and the Girona City Council to involve citizens in the new European map of citizenadvice. This contract is for developing innovation in e-government and public local administrations in general, especially in IT intensiveapplications.
Contract Centre de Transferència de Tecnologia S.L.
Project Type: Contract Centre de Transferència de Tecnologia S.L.
Budget: 25.000 €¤
Participants: University of Girona, Centre de Transferència de Tecnlogia S.L.
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
CRAFT E-BREAD, CRAFT E-COMP. Application of intelligent agents to the design and optimization of equipment to process breadand composites. This is the development of agent software for the optimization of machine design for bread industry and for compositesdesign simulation.
Contract PSM (Carlson Group)
Project Type: Contract PSM (Carlson Group)
Budget: 62.000 €¤
Participants: University of Girona, PSM (Carlson Group)
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
Application of artifical intelligence techniques to the generation of customized industrial alarms and to the building of customers’loyalty. Contracts related to the development of artificial intelligence and control engineering software for marketing applications, empoweringloyalty programs.
PatentsInventors: Carles Matabosch Geronès, Josep Forest Collado, Jordi Fita Mas, Lluís Magí Carceller, Joaquim Salvi Mas. Title: Method and systemfor aligning three-dimensional surfaces. Number of apllication: EP 07114260.8 Date of priority: 13/08/07 Entity holder: AQSENSE S.L. Exploitingenterprises: AQSENSE S.L.
Type of protección of the patent: European
Short description: The present invention relates to a method for aligning a three-dimensional surface representing a real object and a three-dimensional reference surface. More specifically, the invention relates to a method for aligning an analyzed surface and a reference surface,each surface being represented by a cloud of points, so that the Euclidean motion between the two clouds of points is determined. In order toimprove the registration accuracy, point-to-plane distance is used. The invention also relates to a system for aligning a three-dimensional surfacerepresenting a real object and a three-dimensional reference surface suitable for carrying out such a method. The invention may be used inthree-dimensional quality control.
European Joint Master in Environmental ProcessControl Engineering (EPCE)
The programme offers integrated, high quality postgraduateeducation and training through the use of best-practicesmodules and offers specialisation in centres of researchexcellence in the partner universities. The curriculum whichcontains a substantial degree of project and research workwill hopefully produce highly competent engineers in thearea of control of environmental processes. The curriculumoffers avenues for specialization according to the capabilitiesand career needs of the students. The training offered willprovide students with the skills and competencies that areindispensable in high profile jobs in the environmental sector.Apart from showing a capability to carry out technical-industrial development, collaborative management andplanning tasks, the graduates will be qualified to actsuccessfully at an international environment due to theircross-cultural and cross institutional experience.
More information at http://master-epce.eu/joomla/
Joint Masters in Computing
The Master program aims at providing a solid backgroundin Computing for qualified professionals that must able takehigh responsible positions in industry or start researchactivities in theoretical or practical aspects of Computing.The Master also offers the opportunity to focus on one of itsspecializations:
Algorithmics and Programming
Information Systems
Visualization, Virtual Reality, and Graphic Interaction
The student can select between achieving a generic educationon several subjects or focus on one of the specializations.
More information at http://ima.udg.edu/MasterComputacio
Master in Automatic Control and ComputerEngineering
This master offers two specialisation branches; one in controlEngineering and Intelligent Systems (ECSI) and another inComputer Vision and Robotics (VCR) and enables studentsto follow their career at the doctorate program. In the secondacademic year, master students will have the opportunity tomake their stay at other universities or research centresreceiving the highly qualified personal supervision of theirresearch and/or to get the traineeships in the leadingindustrial companies collaborating with the master program.
More information at http://eia.udg.es/master-imagis
VIBOT - Erasmus Mundus Masters in Vision & Robotics
The European master on Computer Vision and Robotics(VIBOT) meets the present needs of industry for qualitycontrol and automation of industrial processes as well as inthe field of health with the ever increasing importance ofmedical imagery in all its forms. The key techniques arecomputer vision and robotics. This Masters programme willprovide, through the proposed European formation, anunrivalled knowledge in computer vision and robotics appliedto industrial problems and medical imagery. Moreover, thestudents will have also acquired mobility, broadmindednessand the language skills which constitute, in an age ofglobalization, a major asset for finding research work eitherin a public laboratory or in a private company.
More information at http://www.vibot.org
Master Programs
Education

3534
IIiA RESEARCH REPORT’07
CONTRACT Consell Comarcal del Pla de l’Estany
Project Type: Contract Consell Comarcal del Pla de l’Estany
Budget: 282.000 €
Participants: University of Girona, Consell Comarcal del Pla de l’Estany
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
Development of open management through DTT. This is the development of the open administration through TV, using the TDT technology.This is called T-Administration, and research is about improving usability for I&R systems, synergically with iSAC.
Contract CITY HALL GIRONA
Project Type: Contract City Hall Girona
Duration: -
Start: -
Budget: 60.000 €¤
Participants: University of Girona, City Hall Girona
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
Collaboration between the University of Girona and the Girona City Council to involve citizens in the new European map of citizenadvice. This contract is for developing innovation in e-government and public local administrations in general, especially in IT intensiveapplications.
Contract Centre de Transferència de Tecnologia S.L.
Project Type: Contract Centre de Transferència de Tecnologia S.L.
Budget: 25.000 €¤
Participants: University of Girona, Centre de Transferència de Tecnlogia S.L.
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
CRAFT E-BREAD, CRAFT E-COMP. Application of intelligent agents to the design and optimization of equipment to process breadand composites. This is the development of agent software for the optimization of machine design for bread industry and for compositesdesign simulation.
Contract PSM (Carlson Group)
Project Type: Contract PSM (Carlson Group)
Budget: 62.000 €¤
Participants: University of Girona, PSM (Carlson Group)
Coordinator: Josep Lluís de la Rosa
UdG Team: ArLab
Application of artifical intelligence techniques to the generation of customized industrial alarms and to the building of customers’loyalty. Contracts related to the development of artificial intelligence and control engineering software for marketing applications, empoweringloyalty programs.
PatentsInventors: Carles Matabosch Geronès, Josep Forest Collado, Jordi Fita Mas, Lluís Magí Carceller, Joaquim Salvi Mas. Title: Method and systemfor aligning three-dimensional surfaces. Number of apllication: EP 07114260.8 Date of priority: 13/08/07 Entity holder: AQSENSE S.L. Exploitingenterprises: AQSENSE S.L.
Type of protección of the patent: European
Short description: The present invention relates to a method for aligning a three-dimensional surface representing a real object and a three-dimensional reference surface. More specifically, the invention relates to a method for aligning an analyzed surface and a reference surface,each surface being represented by a cloud of points, so that the Euclidean motion between the two clouds of points is determined. In order toimprove the registration accuracy, point-to-plane distance is used. The invention also relates to a system for aligning a three-dimensional surfacerepresenting a real object and a three-dimensional reference surface suitable for carrying out such a method. The invention may be used inthree-dimensional quality control.
European Joint Master in Environmental ProcessControl Engineering (EPCE)
The programme offers integrated, high quality postgraduateeducation and training through the use of best-practicesmodules and offers specialisation in centres of researchexcellence in the partner universities. The curriculum whichcontains a substantial degree of project and research workwill hopefully produce highly competent engineers in thearea of control of environmental processes. The curriculumoffers avenues for specialization according to the capabilitiesand career needs of the students. The training offered willprovide students with the skills and competencies that areindispensable in high profile jobs in the environmental sector.Apart from showing a capability to carry out technical-industrial development, collaborative management andplanning tasks, the graduates will be qualified to actsuccessfully at an international environment due to theircross-cultural and cross institutional experience.
More information at http://master-epce.eu/joomla/
Joint Masters in Computing
The Master program aims at providing a solid backgroundin Computing for qualified professionals that must able takehigh responsible positions in industry or start researchactivities in theoretical or practical aspects of Computing.The Master also offers the opportunity to focus on one of itsspecializations:
Algorithmics and Programming
Information Systems
Visualization, Virtual Reality, and Graphic Interaction
The student can select between achieving a generic educationon several subjects or focus on one of the specializations.
More information at http://ima.udg.edu/MasterComputacio
Master in Automatic Control and ComputerEngineering
This master offers two specialisation branches; one in controlEngineering and Intelligent Systems (ECSI) and another inComputer Vision and Robotics (VCR) and enables studentsto follow their career at the doctorate program. In the secondacademic year, master students will have the opportunity tomake their stay at other universities or research centresreceiving the highly qualified personal supervision of theirresearch and/or to get the traineeships in the leadingindustrial companies collaborating with the master program.
More information at http://eia.udg.es/master-imagis
VIBOT - Erasmus Mundus Masters in Vision & Robotics
The European master on Computer Vision and Robotics(VIBOT) meets the present needs of industry for qualitycontrol and automation of industrial processes as well as inthe field of health with the ever increasing importance ofmedical imagery in all its forms. The key techniques arecomputer vision and robotics. This Masters programme willprovide, through the proposed European formation, anunrivalled knowledge in computer vision and robotics appliedto industrial problems and medical imagery. Moreover, thestudents will have also acquired mobility, broadmindednessand the language skills which constitute, in an age ofglobalization, a major asset for finding research work eitherin a public laboratory or in a private company.
More information at http://www.vibot.org
Master Programs
Education

3736
IIiA RESEARCH REPORT’07
Doctorate of the Official Postgraduate Programmein Technology
The doctoral studies of the Official Postgraduate Programmein Technology aim to train researchers in the lines of researchin technology at the University of Girona, following thesegeneral objectives:
High quality advanced training.The creation and dissemination of new knowledge, bothin basic and applied research.The stimulation of research along technological lines.
More information at http://www.udg.edu/Elsestudis/Doctorats/fitxadoctorat/tabid/6754/codi/9/lang/1/anyacad/2007/language/en-US/Default.aspx
PhD Programs
PhD Tesis 2007
Anna BoschImage classification for large number of object categoriesUniversitat de Girona. 25th of September 2007.Advisors: Andrew Zisserman and Xavier Muñoz
Marc BigasIntegració 3D de detectors de píxels híbrids.Universitat de Girona. 16th of March 2007.Advisors: Enric Cabruja and Josep Forest
Carles BoschRealistic Image Synthesis of Surface Scratches and GroovesPhD. Thesis. Universitat Politècnica de Catalunya, Universitéde Limoges, October 2007.Advisors: Xavier Pueyo and Djamchid Ghazanfarpour
Christian Giovanni QuinteroIntrospection on control-grounded capabilities. An agent-inspired aprroach for control.Universitat de Girona. 2007.Director: Josep Lluís de la Rosa and Josep Vehí
Jian WanComputationally Reliable Approaches of Contractive MPCfor Discrete-time Systems.Universitat de Girona. May 2007.Advisors: Josep Vehí and Ningsu Luo
Carles Matabosch3D hand-held sensor for large surface registration.Universitat de Girona. 26th of June 2007.Director: Joaquim Salvi and David Fofi
Arnau OliverAutomatic mass segmentation in mammographic images.Universitat de Girona. 11th of July 2007.Advisor: Jordi Freixenet
Diploma of Advanced Studies 2007
Elisabet BatlleSummarizing image/surface registration for 6DOFrobot/camera pose estimation.D.E.A. Universitat de Girona, June 2007.Tutor: Joaquim Salvi.
Lluís PachecoMobile robot model - based control strategies using monocularperception techniques.D.E.A. Universitat de Girona, June 2007.Tutor: Xavier Cufí and Ningsu Luo.
Maryna KudzinavaFeature-based matching of Underwater Images.D.E.A. Universitat de Girona, October 2007.Tutor: Rafael García and Joan Martí.
Narcís PalomerasMission control system for an AUV.D.E.A. Universitat de Girona, June 2007.Tutor: Pere Ridao and Marc Carreras.
Ricard PradosImage blending techniques and their application in underwatermosaicing.D.E.A. Universitat de Girona, October 2007.Tutor: Rafael García and László Neumann.
Sandra Milena CastilloEstimación de parámetros intervalares para la detección defallos.D.E.A. Universitat de Girona, June 2007.Tutor: Joaquim Armengol.
Bayona D., Meléndez J., Olguin G. “Analysis of Common Cause Failure in RedundantControl Systems Using Fault Trees”. Published in the book Artificial IntelligenceResearch and Development, Cecilio Angulo, Luis Godó, Netherlands, IOS Press(Frointiers in AI), Vol 163, 2007, 408-415, ISBN: 978-1-58603-798-7.
Calm R, García-Jaramillo M, Vehí J, Bondia J, Tarín C, García-Gabín W. SimulaciónIntervalar del Metabolismo de la Glucosa en Pacientes con Diabetes Mellitus Tipo 1.Proceedings of the IX Jornadas de Automatización del Razonamiento Cualitativo yAplicaciones (JARCA 2007) (ISBN: 978-84-8458-231-1), pp: 71-75. 2007.
Castillo SM, Gelso ER, Calm R, Armengol J. Estimación de Parámetros Intervalarespara la Detección Robusta de Fallos. Proceedings of the IX Jornadas de Automatizacióndel Razonamiento Cualitativo y Aplicaciones (JARCA 2007) (ISBN: 978-84-8458-231-1), pp: 71-75. 2007.
de la Rosa i Esteva, Josep Lluís and de los Llanos Tena, Maria. “Scholar Agent:Auctions Mechanisms for Efficient Publication Selection on Congresses and Journals”.ISSN 0922-6389, Artificial Intelligence Research and Development, Volume 163, pp:120-129, 2007. IOS Press, Amsterdam, 2007, ISBN 978-1-58603-798-7, CecilioAngulo, Lluís Godo (eds), St. Julià de Lòria.
de la Rosa i Esteva, Josep Lluís, Mollet Ricardo, Montaner Miquel, Ruiz Daniel, andMuñoz Víctor. “Kalman Filters to Generate Customer Behavior Alarms”, ISSN 0922-6389, Artificial Intelligence Research and Development, Volume 163, pp: 416-425,2007. IOS Press, Amsterdam, 2007, ISBN 978-1-58603-798-7, Cecilio Angulo, LluísGodo (eds), St. Julià de Lòria.
del Acebo Esteve, Hormazábal Nicolás, and de la Rosa Josep Lluís. “Appraisal VarianceEstimatino in the ART Testbed using Fuzzy Corrective Contextual Filters”, ISSN 0922-6389, Artificial Intelligence Research and Development, Volume 163, pp: 104-111,2007. IOS Press, Amsterdam, 2007, ISBN 978-1-58603-798-7, Cecilio Angulo, LluísGodo (eds), St. Julià de Lòria.
Fàbregas, Martí, Corominas, Enric, Villar, Esperança, Saurina, Carme. “EducacióSuperior i treball a catalunya: Anàlisi dels factors d'Inserció Laboral”. Barcelona,Agència per a la Qualitat del Sistema Universitari de Catalunya, 2007, Capitol 3 “Elmercat laboral qualificat i la qualitat de l'ocupació”, ISBN: 378.014.54(467.1).
Khosravi, Toni Martinez, Joaquim Melendez, Joan Colomer and Jorge Sanchez.“Integrating a feature selection algorithm for classification of voltage sags originatedin transmission and distribution networks”. Published in the book Artificial Intelligence.Research and Development, Cecilio Angulo, Luis Godó, Netherlands, IOS Press(Frointiers in AI), Vol 163, 2007, 376-383, ISBN: 978-1-58603-798-7.
Khosravi A. Melendez J., Colomer J., Sánchez J. “Classification of Electric Sags byMeans of MPCA”. Published in the book Advances of Computational Intelligence inIndustrial Systems, Ying LIU, Aixin SUN, Han Tong LOH, Wen Feng LU, Ee-Peng LIM,Heidelberg, Springer-Verlag, 2007, ISBN: 978-3-540-78296-4.
Khosravi A. Melendez J., Colomer J. “Classification of Voltage Sags Based on MPCAModels”. Published in the book Lecture Notes in Computer Science, Springer, Martí etal, Berlin/Heidelberg, Springer, Vol 4477, 2007, 362-369, ISBN: 978-3-540-72846-7.
Lopardo Gabriel Alejandro, Hormazábal Nicolás, and de la Rosa J. Ll. “A Monitor forDigital Ecosystems”, ISSN 0922-6389, Recent Advances in Artificial IntelligenceResearch and Development, Volume 163, pp: 77-86, October 2007. IOS Press,Amsterdam, 2007, ISBN: 978-1-58603-798-7, Cecilio Angulo, Lluís Godo (eds), St.Julià de Lòria.
López, B., Fernández, S., Bajo, J., Corchado, J.M., Fuentetaja, R., Gonzalez, M., Isern,D., Jiménez, S., Valls, A. “Cognitive abilities in agents”. Published in the book Issuesin Multi-Agent Systems - The AgentCities. ES Experience, Antonio Moreno and JuanPavón, Germany, Birkhauser, 2007, 59-85, ISBN: 3764385421.
López Arjona Antonio Manuel, Montaner Rigal Miquel, de la Rosa i Esteva Josep Lluís,Rovira i Regàs Maria Mercè. “POP2.0: A search engine for public information servicesin local government”, ISSN 0922-6389, Artificial Intelligence Research and Development,Volume 163, pp: 255-262, 2007. IOS Press, Amsterdam, 2007, ISBN 978-1-58603-798-7, Cecilio Angulo, Lluís Godo (eds), St. Julià de Lòria.
Martí, Joan, Benedí, Josep Maria, Mendonça, Anna Maria and Serrat, Joan. “Pattern
Recognition and Image Analysis”. Third Iberian Conference, IbPRIA 2007, Girona,Spain, June 6-8, 2007, Proceedings, Part I, Springer, 2007, 625.
Muntaner-Perich E., de la Rosa J.Ll.. “Using Dynamic Electronic Institutions to EnableDigital Business Ecosystems”, ISSN, LNCS Coordination, Organizations, Institutions,and Norms in Agent Systems II, Springer Verlag, Volume 4386, pp: 259- 273, 2007.
Murillo, J., Muñoz, V., Lopez, B, Busquets, D. “Dynamic configurable auctions forcoordinating industrial waste discharges”. Published in the book Multiagent SystemTechnologies, Paolo Petta, Jörg P. Müller, Matthias Klusch, Michael Georgeff, Germany,Springer (LNCS), 2007, 109-120, ISBN: 978-3-540-74948-6.
Murillo, J., López, B. “An efficient estimation function for the crew scheduling problem”.Published in the book Artificial Intelligence Research and Development, Cecilio Angulo,Luis Godó, Netherlands, IOS Press (Frointiers in AI), 2007, 978-1-58603-798-7, ISBN:3764385421.
Pacheco L, Luo. N Mobile robot local predictive control using a visual perceptionhorizon. Emerging Technologies, Robotics and Control Systems (ISBN 978-88-901928-2-1). 217-225. International Society for Advanced Research, 2007.
Pacheco LL and Luo N. “Trajectory planning with a control horizon based on a narrowlocal grid perception: A practical approach for WMR with monocular visual data”.Lecture Notes in Control and Information Sciences, London, Springer, 2007, 99-106.
Qing Xu, Mateu Sbert, Lianping Xing, Jianfeng Zhang. “A Novel Adaptive Samplingby Tsallis Entropy”. CGIV 2007: 5-10.
Ridao, P.; Carreras, M.; Hernandez, E.; Palomeras, N. “Underwater telerobotics forcollaborative research 2007”, Proceedings, Part II, Springer 2007, 657.
Scécsi, László , Szirmay-Kalos, László, Sbert, Mateu. “ShaderX 6: Advanced Rendering”.Editor(s): Wolfgang Engel, Charles River Media, 2007.
Szirmay-Kalos, László, Szécsi, László, Sbert, Mateu. “GPU-based Techniques for GlobalIllumination Effects”. Editorial: Morgan & Claypool Publishers, 2007.
Vehí J, Armengol J, Ortega JA (Eds.). IX Congress of Automatization of QualitativeReasoning and Applications: Qualitative Systems and Diagnosis. (2007) Dept. ofPublications U. de Girona (ISBN: 978-84-8458-231-1).
Yezid Donoso, Ramon Fabregat. Multi-objective Optimization in Computer NetworksUsing Metaheuristics. Published at Auerbach Pub. February 2007
Y. Donoso, R. Fabregat. Network Optimization Using Evolutionary Algorithms in MulticastTransmission. Published at Encyclopedia of Internet Technologies and Applications.October 2007
Zapateiro M, Luo N. Neural network modelling of magnetorheological dampers. ArtificialIntelligence Research and Development (ISBN: 978-1-58603-798-7). 351-358. TheNetherlands: IOS Press, 2007.
Publications in JournalsAciar Silvana, Royo Marcelo, de la Rosa Josep Lluís, and Serrarlos Christian. “Increasingeffectiveness in e-commerce: recommendations applying intelligent agents”. InternationalJournal of Business and Systems Research (IJBSR), ISSN (Online): 1751-2018 - ISSN(Print): 1751-200X, Inderscience Publishers, Volume 1, pp: 26-40, in press (2007).
Aciar Silvana, Zhang Debbie, Simoff Simeon, Debenham John. “Informed Recommender:A Recommender System That Bases Recommendations on Consumer ProductReviews”. IEEE Magazine in Intelligent Systems, Vol. 22, issue 3, pp: 39-47, May-June2007, ISSN 1541-1672, May-June 2007.
Baldiris Silvia M., Moreno German D., Fabregat Ramon, Guarín Iván A., LlamosaRicardo, Fraile Juan A. García. "Extensiones en SHABOO: Sistema HipermediaAdaptativo para la Enseñanza de la Programación Orientada a Objetos", Publishedat Sexta Edición Revista Enlace Informático - Universidad del Cauca. ISSN 1692-374X.December 2007.
Bardera, Anton, Feixas, Miquel, Boada, Imma, Rigau, Jaume, Sbert, Mateu. “Registration-Based Segmentation Using the Information Bottleneck Method”. Lecture Notes inComputational Science (IbPRIA’07), Volume 2, pp: 130-137, 2007.
Books or Book Chapters
Publications

3736
IIiA RESEARCH REPORT’07
Doctorate of the Official Postgraduate Programmein Technology
The doctoral studies of the Official Postgraduate Programmein Technology aim to train researchers in the lines of researchin technology at the University of Girona, following thesegeneral objectives:
High quality advanced training.The creation and dissemination of new knowledge, bothin basic and applied research.The stimulation of research along technological lines.
More information at http://www.udg.edu/Elsestudis/Doctorats/fitxadoctorat/tabid/6754/codi/9/lang/1/anyacad/2007/language/en-US/Default.aspx
PhD Programs
PhD Tesis 2007
Anna BoschImage classification for large number of object categoriesUniversitat de Girona. 25th of September 2007.Advisors: Andrew Zisserman and Xavier Muñoz
Marc BigasIntegració 3D de detectors de píxels híbrids.Universitat de Girona. 16th of March 2007.Advisors: Enric Cabruja and Josep Forest
Carles BoschRealistic Image Synthesis of Surface Scratches and GroovesPhD. Thesis. Universitat Politècnica de Catalunya, Universitéde Limoges, October 2007.Advisors: Xavier Pueyo and Djamchid Ghazanfarpour
Christian Giovanni QuinteroIntrospection on control-grounded capabilities. An agent-inspired aprroach for control.Universitat de Girona. 2007.Director: Josep Lluís de la Rosa and Josep Vehí
Jian WanComputationally Reliable Approaches of Contractive MPCfor Discrete-time Systems.Universitat de Girona. May 2007.Advisors: Josep Vehí and Ningsu Luo
Carles Matabosch3D hand-held sensor for large surface registration.Universitat de Girona. 26th of June 2007.Director: Joaquim Salvi and David Fofi
Arnau OliverAutomatic mass segmentation in mammographic images.Universitat de Girona. 11th of July 2007.Advisor: Jordi Freixenet
Diploma of Advanced Studies 2007
Elisabet BatlleSummarizing image/surface registration for 6DOFrobot/camera pose estimation.D.E.A. Universitat de Girona, June 2007.Tutor: Joaquim Salvi.
Lluís PachecoMobile robot model - based control strategies using monocularperception techniques.D.E.A. Universitat de Girona, June 2007.Tutor: Xavier Cufí and Ningsu Luo.
Maryna KudzinavaFeature-based matching of Underwater Images.D.E.A. Universitat de Girona, October 2007.Tutor: Rafael García and Joan Martí.
Narcís PalomerasMission control system for an AUV.D.E.A. Universitat de Girona, June 2007.Tutor: Pere Ridao and Marc Carreras.
Ricard PradosImage blending techniques and their application in underwatermosaicing.D.E.A. Universitat de Girona, October 2007.Tutor: Rafael García and László Neumann.
Sandra Milena CastilloEstimación de parámetros intervalares para la detección defallos.D.E.A. Universitat de Girona, June 2007.Tutor: Joaquim Armengol.
Bayona D., Meléndez J., Olguin G. “Analysis of Common Cause Failure in RedundantControl Systems Using Fault Trees”. Published in the book Artificial IntelligenceResearch and Development, Cecilio Angulo, Luis Godó, Netherlands, IOS Press(Frointiers in AI), Vol 163, 2007, 408-415, ISBN: 978-1-58603-798-7.
Calm R, García-Jaramillo M, Vehí J, Bondia J, Tarín C, García-Gabín W. SimulaciónIntervalar del Metabolismo de la Glucosa en Pacientes con Diabetes Mellitus Tipo 1.Proceedings of the IX Jornadas de Automatización del Razonamiento Cualitativo yAplicaciones (JARCA 2007) (ISBN: 978-84-8458-231-1), pp: 71-75. 2007.
Castillo SM, Gelso ER, Calm R, Armengol J. Estimación de Parámetros Intervalarespara la Detección Robusta de Fallos. Proceedings of the IX Jornadas de Automatizacióndel Razonamiento Cualitativo y Aplicaciones (JARCA 2007) (ISBN: 978-84-8458-231-1), pp: 71-75. 2007.
de la Rosa i Esteva, Josep Lluís and de los Llanos Tena, Maria. “Scholar Agent:Auctions Mechanisms for Efficient Publication Selection on Congresses and Journals”.ISSN 0922-6389, Artificial Intelligence Research and Development, Volume 163, pp:120-129, 2007. IOS Press, Amsterdam, 2007, ISBN 978-1-58603-798-7, CecilioAngulo, Lluís Godo (eds), St. Julià de Lòria.
de la Rosa i Esteva, Josep Lluís, Mollet Ricardo, Montaner Miquel, Ruiz Daniel, andMuñoz Víctor. “Kalman Filters to Generate Customer Behavior Alarms”, ISSN 0922-6389, Artificial Intelligence Research and Development, Volume 163, pp: 416-425,2007. IOS Press, Amsterdam, 2007, ISBN 978-1-58603-798-7, Cecilio Angulo, LluísGodo (eds), St. Julià de Lòria.
del Acebo Esteve, Hormazábal Nicolás, and de la Rosa Josep Lluís. “Appraisal VarianceEstimatino in the ART Testbed using Fuzzy Corrective Contextual Filters”, ISSN 0922-6389, Artificial Intelligence Research and Development, Volume 163, pp: 104-111,2007. IOS Press, Amsterdam, 2007, ISBN 978-1-58603-798-7, Cecilio Angulo, LluísGodo (eds), St. Julià de Lòria.
Fàbregas, Martí, Corominas, Enric, Villar, Esperança, Saurina, Carme. “EducacióSuperior i treball a catalunya: Anàlisi dels factors d'Inserció Laboral”. Barcelona,Agència per a la Qualitat del Sistema Universitari de Catalunya, 2007, Capitol 3 “Elmercat laboral qualificat i la qualitat de l'ocupació”, ISBN: 378.014.54(467.1).
Khosravi, Toni Martinez, Joaquim Melendez, Joan Colomer and Jorge Sanchez.“Integrating a feature selection algorithm for classification of voltage sags originatedin transmission and distribution networks”. Published in the book Artificial Intelligence.Research and Development, Cecilio Angulo, Luis Godó, Netherlands, IOS Press(Frointiers in AI), Vol 163, 2007, 376-383, ISBN: 978-1-58603-798-7.
Khosravi A. Melendez J., Colomer J., Sánchez J. “Classification of Electric Sags byMeans of MPCA”. Published in the book Advances of Computational Intelligence inIndustrial Systems, Ying LIU, Aixin SUN, Han Tong LOH, Wen Feng LU, Ee-Peng LIM,Heidelberg, Springer-Verlag, 2007, ISBN: 978-3-540-78296-4.
Khosravi A. Melendez J., Colomer J. “Classification of Voltage Sags Based on MPCAModels”. Published in the book Lecture Notes in Computer Science, Springer, Martí etal, Berlin/Heidelberg, Springer, Vol 4477, 2007, 362-369, ISBN: 978-3-540-72846-7.
Lopardo Gabriel Alejandro, Hormazábal Nicolás, and de la Rosa J. Ll. “A Monitor forDigital Ecosystems”, ISSN 0922-6389, Recent Advances in Artificial IntelligenceResearch and Development, Volume 163, pp: 77-86, October 2007. IOS Press,Amsterdam, 2007, ISBN: 978-1-58603-798-7, Cecilio Angulo, Lluís Godo (eds), St.Julià de Lòria.
López, B., Fernández, S., Bajo, J., Corchado, J.M., Fuentetaja, R., Gonzalez, M., Isern,D., Jiménez, S., Valls, A. “Cognitive abilities in agents”. Published in the book Issuesin Multi-Agent Systems - The AgentCities. ES Experience, Antonio Moreno and JuanPavón, Germany, Birkhauser, 2007, 59-85, ISBN: 3764385421.
López Arjona Antonio Manuel, Montaner Rigal Miquel, de la Rosa i Esteva Josep Lluís,Rovira i Regàs Maria Mercè. “POP2.0: A search engine for public information servicesin local government”, ISSN 0922-6389, Artificial Intelligence Research and Development,Volume 163, pp: 255-262, 2007. IOS Press, Amsterdam, 2007, ISBN 978-1-58603-798-7, Cecilio Angulo, Lluís Godo (eds), St. Julià de Lòria.
Martí, Joan, Benedí, Josep Maria, Mendonça, Anna Maria and Serrat, Joan. “Pattern
Recognition and Image Analysis”. Third Iberian Conference, IbPRIA 2007, Girona,Spain, June 6-8, 2007, Proceedings, Part I, Springer, 2007, 625.
Muntaner-Perich E., de la Rosa J.Ll.. “Using Dynamic Electronic Institutions to EnableDigital Business Ecosystems”, ISSN, LNCS Coordination, Organizations, Institutions,and Norms in Agent Systems II, Springer Verlag, Volume 4386, pp: 259- 273, 2007.
Murillo, J., Muñoz, V., Lopez, B, Busquets, D. “Dynamic configurable auctions forcoordinating industrial waste discharges”. Published in the book Multiagent SystemTechnologies, Paolo Petta, Jörg P. Müller, Matthias Klusch, Michael Georgeff, Germany,Springer (LNCS), 2007, 109-120, ISBN: 978-3-540-74948-6.
Murillo, J., López, B. “An efficient estimation function for the crew scheduling problem”.Published in the book Artificial Intelligence Research and Development, Cecilio Angulo,Luis Godó, Netherlands, IOS Press (Frointiers in AI), 2007, 978-1-58603-798-7, ISBN:3764385421.
Pacheco L, Luo. N Mobile robot local predictive control using a visual perceptionhorizon. Emerging Technologies, Robotics and Control Systems (ISBN 978-88-901928-2-1). 217-225. International Society for Advanced Research, 2007.
Pacheco LL and Luo N. “Trajectory planning with a control horizon based on a narrowlocal grid perception: A practical approach for WMR with monocular visual data”.Lecture Notes in Control and Information Sciences, London, Springer, 2007, 99-106.
Qing Xu, Mateu Sbert, Lianping Xing, Jianfeng Zhang. “A Novel Adaptive Samplingby Tsallis Entropy”. CGIV 2007: 5-10.
Ridao, P.; Carreras, M.; Hernandez, E.; Palomeras, N. “Underwater telerobotics forcollaborative research 2007”, Proceedings, Part II, Springer 2007, 657.
Scécsi, László , Szirmay-Kalos, László, Sbert, Mateu. “ShaderX 6: Advanced Rendering”.Editor(s): Wolfgang Engel, Charles River Media, 2007.
Szirmay-Kalos, László, Szécsi, László, Sbert, Mateu. “GPU-based Techniques for GlobalIllumination Effects”. Editorial: Morgan & Claypool Publishers, 2007.
Vehí J, Armengol J, Ortega JA (Eds.). IX Congress of Automatization of QualitativeReasoning and Applications: Qualitative Systems and Diagnosis. (2007) Dept. ofPublications U. de Girona (ISBN: 978-84-8458-231-1).
Yezid Donoso, Ramon Fabregat. Multi-objective Optimization in Computer NetworksUsing Metaheuristics. Published at Auerbach Pub. February 2007
Y. Donoso, R. Fabregat. Network Optimization Using Evolutionary Algorithms in MulticastTransmission. Published at Encyclopedia of Internet Technologies and Applications.October 2007
Zapateiro M, Luo N. Neural network modelling of magnetorheological dampers. ArtificialIntelligence Research and Development (ISBN: 978-1-58603-798-7). 351-358. TheNetherlands: IOS Press, 2007.
Publications in JournalsAciar Silvana, Royo Marcelo, de la Rosa Josep Lluís, and Serrarlos Christian. “Increasingeffectiveness in e-commerce: recommendations applying intelligent agents”. InternationalJournal of Business and Systems Research (IJBSR), ISSN (Online): 1751-2018 - ISSN(Print): 1751-200X, Inderscience Publishers, Volume 1, pp: 26-40, in press (2007).
Aciar Silvana, Zhang Debbie, Simoff Simeon, Debenham John. “Informed Recommender:A Recommender System That Bases Recommendations on Consumer ProductReviews”. IEEE Magazine in Intelligent Systems, Vol. 22, issue 3, pp: 39-47, May-June2007, ISSN 1541-1672, May-June 2007.
Baldiris Silvia M., Moreno German D., Fabregat Ramon, Guarín Iván A., LlamosaRicardo, Fraile Juan A. García. "Extensiones en SHABOO: Sistema HipermediaAdaptativo para la Enseñanza de la Programación Orientada a Objetos", Publishedat Sexta Edición Revista Enlace Informático - Universidad del Cauca. ISSN 1692-374X.December 2007.
Bardera, Anton, Feixas, Miquel, Boada, Imma, Rigau, Jaume, Sbert, Mateu. “Registration-Based Segmentation Using the Information Bottleneck Method”. Lecture Notes inComputational Science (IbPRIA’07), Volume 2, pp: 130-137, 2007.
Books or Book Chapters
Publications
3938
IIiA RESEARCH REPORT’07
Bosch, Anna, Muñoz, Xavi and Freixenet, Jordi. ”Segmentation and description ofnatural outdoor scenes”. Image and Vision Computing, 2007, Volume 25, Nr 8, 727-740.
Bosch, Anna, Muñoz, Xavier and Marti, Robert. ”Which is the best way to organize/classifyimages by content?”. Image and Vision Computing, 2007, Volume 25, Nr 6, 778-791.
Bose P., Coll Huratdo N.F. and Sellarès J.A. “A General Online Approximation Algorithmfor Embedded Plane Graphs with Applications”. International Journal of ComputationalGeometry and Applications, Volume 17, Issue 6, pp 529-554, 2007.
Calderón G, Armengol J, Vehí J, Gelso E. Dynamic Diagnosis Based on IntervalAnalytical Redundancy Relations and Signs of the Symptoms. AI COMMUNICATIONS(ISSN: 0921-7126), 20(1): 39-47. 2007, IOS Press.
Camacho O, Rojas R, García-Gabín W. Some Long Time Delay Sliding Mode ControlApproaches. ISA Transactions (ISSN: 0019-0578), 46(2): 95-105. 2007, ElsevierScience Inc.
Carreras, Marc, Yuh,Junku, Batlle, Joan and Ridao, Pere. “Application of SONQL forreal-time learning of robot behaviours”. Robotics and Autonomous Systems, 2007,Volume 5, Nr 8, 628-642.
Carreras, Marc, Palomeras, Narcís, Ridao, Pere and Ribas, David. “Design of a MissionControl System for an AUV”. International Journal of Control, 2007, Volume 80, Nr7, 993–1007.
Carrillo C., de la Rosa J. Ll., and Canals A. “Towards a Knowledge Economy”.International Journal of Community Currency Research, ISSN 1325-9547, Volume 11,pp: 84-97, 2007.
Castro, Francesc, Patow, Gustavo, Sbert, Mateu, Halton, John H. “Fast GPU-basedreuse of paths in radiosity”. Monte Carlo Methods and Applications, Volume 13, Nr4, pp: 253-273, 2007.
Castro, F.; Patow, G.; Sbert, M.; Halton, J. H. “Fast GPU-based reuse of paths inradiosity”. Monte Carlo Methods and Applications,Volume: 13, Issue: 4, Cover date:November 20, Pages: 253-273 (2007).
César Barta, Joaquim Meléndez, Joan Colomer. “Off line Diagnosis of Ariane flightsusing PCA”. Space Technology (Lister Editors), 2007, Volume 27, Nr 2, In press.
Cobos Carlos, Niño Miguel, Mendoza Martha, Fabregat Ramon and Gomez Luis."Learning Management System Based on SCORM, Agents and Mining", Publishedat WISE 2007. Lecture Notes in Computer Science 4831 Springer 2007, ISBN 978-3-540-76992-7. pp. 298-309. Nancy (France). 3-7. December 2007.
Coll N., Fort M., Madern N. and Sellarès J.A. “Multi-visibility maps of triangulatedterrains”. International Journal of Geographical Information Science, Vol. 21, No. 10,pp 1115-11134, 2007.
de la Rosa J. Ll., and Szymansky B. K., “Selecting Scientific Papers for Publicationvia Citation Auctions”. IEEE Magazine in Intelligent Systems ISSN 1541-1672, Volume22, n. 6, pp: 16-20, November/Desember 2007.
de la Rosa Josep Lluís, and Muñoz Israel. “Learning and Adaptation in PhysicalHeterogeneous Teams of Robots”. Journal of Physical Agents ISSN: 1888-0258,Volume 1, pp: 9-18, September 2007.
de la Rosa Josep Lluís, Figueras Albert, Quintero Christian, Ramon Josep Antoni,Ibarra Salvador, and Esteva Santiago. “Outline of Modification Systems”. STUDIESIN COMPUTATIONAL INTELLIGENCE ISSN: 1860-949X, Springer Verlag, Volume 57,pp: 231-24, June 2007.
Del Bue, Alessio, Lladó, Xavier and Agapito, Lourdes. “Segmentation of Rigid Motionfrom Non-rigid 2D Trajectories”. Lecture Notes in Computer Science, 2007, Volume4477, 491-498.
Diez Y., Sellarés J. Antoni. “Efficient Colored Point Set Matching Under Noise”. ICCSA2007, Lecture Notes on Computational Science 4705, pp. 26-40, Springer-Verlag, 2007.
Fàbrega Lluís, Jové Teodor, Vilà Pere, Marzo Josep Lluís. “A guaranteed minimumthroughput service for TCP flows using measurement-based admission control",Published at International Journal of Communication Systems (IJCS), vol. 20, no. 1,pàg. 43-63, John Wiley & Sons, Ltd, ISSN 1074-5351. January 2007.
Flórez J, Sbert M, Sainz MA, Vehí J. Guaranteed Adaptive Antialiasing using IntervalArithmetic. LECTURE NOTES IN COMPUTER SCIENCE (ISSN: 0302-9743), 4488:166-169. 2007, Springer Berlin.
Freixenet, Jordi, Oliver, Arnau, Lladó, Xavier and Martí, Robert. ”Mass Eigendetectionand the Benefits of Introducing Breast Density Information”. International Journal ofComputed Aided Radiology and Surgery, 2007, Volume 2, Nr 1, 332-334.
Gelso E, Castillo SM, Armengol J. “Diagnosis based on Interval Analytical RedundancyRelations and Signs of the Symptoms.” IFAC International Workshop on IntelligentManufacturing Systems (IMS’07). May 2007, Alacant (Spain).
Gleason, Arthur, Lirman, Diego, Williams, Dana, Gracias, Nuno, Gintert, Brooke,Madjidi Hussein, Reid, Pam, Boynton, Chris, Negahdaripour, Shahriar, Miller, Margaretand Kramer, Phil. “Documenting hurricane impacts on coral reefs using two-dimensionalvideo-mosaic technology”. Marine Ecology, 2007, Volume 28, Nr 2, 54-258.
Huerta M. K., Hesselbach X., Fabregat R., Padilla J. J. Ravelo O. "Reducción de CongestiónMPLS Mediante Técnicas de Optimización de Flujos en la Red", Published at IEEE LatinAmerica Transactions. Volume 5, Issue 5, Page(s):352 - 359. September 2007.
Innocenti, Bianca, López, Beatriz and Salvi, Joaquim. “A multi-agent architecture withcooperative fuzzy control for a mobile robot”. Robotics and Autonomous Systems,2007, Volume 55, Nr 12, 881-891.
Jia L, Luo N, Yuan JQ. A model based estimation of the profit function for the continuous
fermentation of baker’s yeast. Chemical Engineering and Processing (ISSN: 0255-2701). Elsevier Science Switzerland.
Lirman, Diego, Gracias, Nuno, Gintert, Brooke, Gleason, Arthur, Reid, Pam,Negahdaripour, Shahriar, and Kramer, Phil. “Development and application of a video-mosaic survey technology to document the status of coral reef communities”.Environmental Monitoring and Assessment, 2007, Volume 125, Nr 1, 59-73.
Llanos David, Staroswiecki Marcel, Colomer Joan, Meléndez Joaquim. “TransmisiónDelays in Residual Computation”. IET Control Theory & Applications (former IEE Proc.Control Theory & Applications), 2007, Volume 1, Nr 5, 1471-1476
Lopez, B., Innocenti, B., Busquets, D. “A Multiagent System to Support AmbulanceCoordination of Urgent Medical Transportation”. IEEE Intelligent Systems, 2007 (toappear).
Martí, Robert, Martí, Joan, Freixenet, Jordi, Vilanova, Joan Carles and Barceló, Joaquim.“Optimally Discriminant Moments for Speckle Detection in Real B-Scan Images”.Pattern Recognition and Image Analysis Lecture Notes in Computer Science, 2007,Volume 4478, 242 – 249.
Marti, Robert, Arnau, Oliver, Raba, David and Freixenet Jordi. ”Breast skin-linesegmentation using contour growing”. Lecture Notes in Computer Science, 2007,Volume 4478, 564-571.
Martí, Robert, Martí, Joan, Freixenet, Jordi, Vilanova, Joan Carles and Barceló, Joaquim.“Robust Speckle Detection in Ultrasound Images. Evaluation Aspects”. The InternationalSociety for Optical Engineering, 2007,Volume 6356, 63560P-1 – 63560P-11.
Marzo Jose L., Calle Eusebi, Vilà Pere, Urra Anna. "Performance evaluation of minimuminterference routing in network scenarios with protection requirements", Publishedat VOL 30/16. Pp 3161-3168. Computer Communication, ISSN 0140-3664. Elsevier.November 2007.
Michalowski, M., Sabanovic, S., DiSalvo, C., Busquets, D., Hiatt, L., Melchior, N.,Simmons, R. “Socially Distributed Perception: GRACE plays social tag at AAAI 2005”.Autonomous Robots, 2007, Volume 22, Nr 4, 385-397.
Mora JJ, Melendez J., Carrillo G.. “Comparison of impedance based fault locationmethods for power distribution systems“, Electric Power Systems Research (Elsevier),2007, In press (Available on line 20 July 2007).
Muntaner-Perich E., de la Rosa J.Ll.. “Towards a Formalisation of Dynamic ElectronicInstitutions”, ISSN, LNCS Coordination, Organizations, Institutions, and Norms inAgent Systems III, Springer Verlag, Volume 4870, pp: 97-109, 2007.
Pan X., Gillies M., Sezgin T. M., Loscos C. “Expressing Complex Mental States ThroughFacial Expressions - Affective Computing and Intelligent Interaction”. Lecture notesin computer science, Springer Berlin Heidelberg, Vol. 4738, pp 745-746, 2007. ISBN978-3-540-74888-5.
Pacheco, LLuís, Cufí, Xavi and Cobos, Javier. “Constrained Monocular ObstaclePerception with Just One Frame”. Lecture Notes in Computer Science, 2007, Volume4477, 611-619.
Pacheco, Lluis and Luo, Ningsu. “Mobile Robot Local Predictive Control Using a VisualPerception Horizon”. International journal of Factory Automation, Robotics and SoftConputing, 2007, Volume 2, 73-81.
Pacheco, Lluís and Luo, Ningsu. “Mobile Robot Local Predictive Control underPerception Constraints“. International journal of Factory Automation, Robotics andSoft Conputing, 2007, Volume 4, 40-48.
Patow, G.; Pueyo, X. and Vinacua, A. “User-Guided Inverse Reflector Design”. Computers& Graphics, Volume 31, Issue 3, June 2007, Pages 501-515 Elsevier. Netherlands.
Prados, Ferran, Boada, Imma, Feixas, Miquel, Prats, A., Blasco, G, Pedraza, S., Puig,J. “DTIWeb: A,Web-based Framework for DTI data Visualization and Processing”.Lecture Notes in Computer Science (ICCSA’07), 2007.
Raba, David, Peracaula, Marta, Martí, Robert and Martí, Joan. “On the Detection ofRegions-of-Interest in Dynamic Contrast-Enhanced MRI”. Pattern Recognition andImage Analysis Lecture Notes in Computer Science, 2007, Volume 4477, 129 – 136.
Ribas, David, Ridao, Pere, Neira, José and Tardós, Joan Domingo. “Line extractionfrom mechanically scanned imaging sonar”. Lecture Notes in Computer Science,2007, Volume 4477, 322-329.
Rigau, Jaume, Feixas, Miquel, Sbert, Mateu. “A generalised mutual-information-basedoracle for hierarchical radiosity”. Lecture Notes in Computer Science (ICCS’07), pp:105-113, 2007.
Obaidat Mohammad, Marzo Jose L. "Advances in Communication Networking",Accepted at Guest Editorial. Special Issue. Computer Communications 30 (2007)2995–2999. ISSN 0140-3664. Elsevier. November 2007.
Oliver, Arnau, Lladó, Xavier, Martí, Joan, Martí, Robert and Freixenet, Jordi. “FalsePositive Reduction in Breast Mass Detection using Two-Dimensional PCA”. PatternRecognition and Image Analysis, Lecture Notes in Computer Science, 2007, Volume4478, 154 – 161.
Oliver, Arnau, Lladó, Xavier, Freixenet, Jordi and Martí, Joan. ”False Positive Reductionin Mammographic Mass Detection using Local Binary Patterns”. Lecture Notes inComputer Science, 2007, Volume 4791, 286-293.
Orghidan, Radu, Mouaddib, El Mustapha, Salvi, Joaquim, JJ Serrano. “CatadioptricSingle Shot Rangefinder for Textured Map Building in Robot Navigation”. IET ComputerVision, 2007, Volume 1, Nr 2, 43-53.
Pacheco L, Luo N, Ferrer J. “Mobile robot local predictive control under perceptionconstraints”. INTERNATIONAL JOURNAL OF FACTORY AUTOMATION, ROBOTICS AND
SOFT COMPUTING (ISSN: 1828-6984). Pp 273-281. 2007, International Society forAdvanced Research.
Salvi, Joaquim, Matabosch, Carles, Fofi, David and Forest, Josep. “A Review of RecentRange Image Registration Methods with Accuracy Evaluation”. Image and VisionComputing, 2007, Volume 25, Nr 5, 578-596.
Shmilovici A., Bakir G.H., Figueras A., de la Rosa J.L.. “On the Simplification of anExamples Based Controller with Support Vector Machines”. Control and IntelligentSystems. Acta Press (Indexed by the American Mathematical Society - MathematicalReviews, Cambridge Scientific Abstracts, Compendex (Engineering Information), FIZKarlsruhe and INSPEC), ISSN: 1480-1752, Volume 35, pp: 55-61, 2007.
Solano Fernando, Caro L F., de Oliveira Jaudelice C., Fabregat Ramon, Marzo JoseLuis. "G+: Enhanced Traffic Grooming in WDM Mesh Networks using Lighttours",Published at IEEE Journal on Selected Areas in Communications. ISSN 0733-8716,Vol 25, num. 5, pp 1034-1047. June 2007.
Tesouro Montse and Puiggalí Juan. "The computer helps in the acquisition of educationalknowledge.", Published at Interactive Educational Multimedia, 14 (April 2008),pp102-115. May 2007.
Umenhoffer Tamás, Patow Gustavo, Szirmay-Kalos László. “Robust Multiple SpecularReflections and Refractions”. GPU Gems 3. Chapter 17. Addison-Wesley Professional,2007, (ISBN 978-0321515261), pp. 387-408.
Trias, Dani, Garcia, Rafael, Costa, Josep, Blanco, Norbert and Hurtado, Jorge Eduardo.“Quality control of CFRPs by means of digital image processing and statistical pointpattern analysis”. Composites Science and Technology, 2007, Volume 67, Nr 11-12,2438-2446.
Urra Anna, Calle Eusebi, Marzo Jose L., Vila Pere. "An Enhanced Dynamic MultilayerRouting for Networks with Protection Requirements", Published at Journal ofCommunications and Networks, Vol. 9, Number 4, December 2007. December 2007.
Xu, Qing, Sbert, Mateu, Feixas, Miquel, Zhang, Jianfeng. “AM-GM Difference BasedAdaptive Sampling for Monte Carlo Global Illumination”. Lecture Notes in ComputerScience (ICCSA’07), Volume 2, 2007.
Xu, Qing, Sbert, Mateu. “A new way to reusing paths”. Lecture Notes in ComputerScience (ICCSA’07), Volume 2, pp: 741-750, 2007.
Zambrano D, García-Gabín W, Camacho EF. A Heuristic Predictive Logic ControllerApplied to Hybrid Solar Air Conditioning Plant. LECTURE NOTES IN COMPUTERSCIENCE (ISSN: 0302-9743), 4413: 793-796. 2007, Springer Verlag, Berlin Heidelberg.
Zapateiro M, Luo N. “Parametric and non-parametric characterization of the dynamicsof a shear-mode magnetorheological damper”. JOURNAL OF VIBROENGINEERING(ISSN: 1392-8716), 9: 14-18. 2007, Fondai Lithuania.
Publications in ConferencesBaldiris Silvia, Fabregat Ramón, Santos Olga. "Modeling Competencies upon dotLRN",Published at OpenACS and LRN Spring Conference. Vienna. April 2007.
Baldiris Silvia, Santos Olga, Barrera Carmen, Velez Jeimy, Boticario Jesús G. andFabregat Ramon. "Linking educational specifications and standards for dynamicmodelling in ADAPTAPlan", Published at International Workshop on Representationmodels and Techniques for Improving e-Learning: Bringing Context into Web-basedEducation. Roskilde University, Denmark, 20-24. August 2007.
Baldiris Silvia, Santos Olga C., Boticario Jesús G., Fabregat Ramón. "Modelado decursos mediante el uso intensivo de estándares educativos para dar soporte aadaptaciones dinámicas", Published at Simposio Nacional de Tecnologías de laInformación y las Comunicaciones en la Educación (SINTICE 2007). Zaragoza (España).11-14. September 2007.
Baldiris Silvia M., Santos Olga C., Fabregat G Ramón, Boticario Jesus G.. "Modeladode Competencias en Ambientes Virtuales de Aprendizaje", Published at 3 CongresoInternacional sobre el Enfoque Basado en Competencias: “Diseño Curricular porCompetencias y Gestión de la Calidad del Aprendizaje”. October 2007.
Baldiris Navarro Silvia Margarita, Vélez Ramos Jeimy Beatriz, Fabregat Gesa Ramón."Tendencias en la Investigación acerca de los Sistemas de Gestión de Aprendizajes",Published at CONGRESO INTERNACIONAL: COMPETENCIAS, CICLOS PROPEDÉUTICOSY APRENDIZAJE VIRTUAL. November 2007.
Batlle Elisabeth, Matabosch Carles and Salvi Joaquim. “Summarizing Image/SurfaceRegistration for 6DoF Robot/Camera Pose Estimation”. 3rd Iberian Conference onPattern Recognition and Image Analysis, Spain (Girona).
Batlle Elisabeth, Matabosch Carles, and Salvi Joaquim. “Overview of 3D RegistrationTechniques Including Loop Minimization for the Complete Acquisition of LargeManufactured Parts and Complex Environments”. IEEE/SPIE 8th InternationalConference on Quality Control by Artificial Vision, France (Le Creusot)
Bondia J, García-Gabín W, Vehí J, Tarín C, Calm R. “Online Detection of TherapeuticallyWrong Measurements of Continous Glucose Monitors Using Support Vector Machines.”Diabetes Technology Meeting. Sep 2007, San Francisco (USA).
Bondia J, Tarín C, Calm R, García-Jaramillo M, Vehí J, García-Gabín W. “Predicciónde glucemia en pacientes con diabetes tipo 1 ante incertidumbre.” I Simposio enModelado y Simulación de Sistemas Dinámicos (SIMOSI’07) en el II Congreso Españolde Informática (CEDI). Sep 2007, Zaragoza.
Bosch Anna, Zisserman Andrew, Muñoz Xavier. ”Image classification using randomforests and ferns”. International Conference on Computer Vision, Brazil (Rio de Janeiro)
Bosch Anna, Zisserman Andrew, Muñoz Xavier. ”Representing shape with a spatial
pyramid kernel”. ACM International Conference on Image and Video Retrieval, TheNetherlands (Amsterdam).
Bosch Carles, Patow Gustavo. “Real Time Scratches and Grooves”. XVII CongresoEspañol de Informática Gráfica (CEIG '07), Zaragoza, Spain, September 2007.
Bueno A, Vilà P., Fabregat R. ”Multicast Extension of Unicast Charging for QoSServices", Published at Fourth European Conference on Universal Multiservice Networks- European Conference on Universal Multiservice Networks (ECUMN'07) Tolouse,France. February 2007.
Bueno A., Guadall C, Marzo J L, Harle D. "TRiEM: An application for MS TeleRehabilita-tion", Published at First International Conference of E-medical Systems. October 2007.
Calderón-Espinoza G, Rodríguez-Martínez A, Armengol J, Vehí J, Sainz MA. “HeatRate Supervision of Fossil Power Plant by Modal Interval Analysis.” 7th World Congressof Chemical Engineering (WCCE 07). Jul 2007, Glasgow (Scotland).
Calderón-Espinoza Gabriela, Armengol Joaquim, Vehí Josep, Gelso Esteban R. “Dynamicdiagnosis based on interval analytical redundancy relations and signs of the symptoms”.AI Communications, May 1, 2007, Vol. 20, 39 – 47 (0.469).
Calle Eusebi, Marzo Jose L., Urra Anna, Vilà Pere. "Suitability of Minimum InterferenceRouting Schemes with Protection", Published at DRCN 2007, La Rochelle, France.October 2007.
Calm R, García-Jaramillo M, Vehí J, Bondia J, Tarín C, García-Gabín W. “Predictionof Glucose Excursions under Uncertain Parameters and Food Intake in IntensiveInsulin Therapy for Type 1 Diabetes Mellitus.” 29th Annual International Conferenceof the IEEE Engineering in Medicine and Biology Society. Aug 2007, Lyon (France).
Calm R, García-Jaramillo M, Bondia J, Vehí J, Tarín C, García-Gabín W. “Predictionof postprandial glucose under uncertainty in Type 1 Diabetes Mellitus: a comparisonof Interval Methods and Monte Carlo Simulation.” Meeting of the Spanish SystemsBiology Network (REBS). Nov 2007, Murcia.
Calm R, García-Jaramillo M, Vehí J, Bondia J, Tarín C, García-Gabín W. “SimulaciónIntervalar del Metabolismo de la Glucosa en Pacientes con Diabetes Mellitus tipo I.”IX Jornadas de Automatización del Razonamiento Cualitativo y Aplicaciones (JARCA07). Jun 2007, Lloret de Mar.
Camacho Oscar, Rubén Rojas, García-Gabín Winston. “Some Long Time Delay SlidingMode Control Approaches”. ISA Transactions, 2007 (0.300).
Castelló, P., Sbert, M., Chover, M., Feixas, M. “Viewpoint Entropy-Driven Simplification”,WSCG 2007, FULL Papers proceedings, ISBN 978-80-86943-01-5. Plzen (CzechRepublic), February 2007.
Castillo SM, Gelso ER, Calm R, Armengol J. “Estimación de Parámetros Intervalarespara la Detección Robusta de Fallos.” IX Jornadas de Automatización del RazonamientoCualitativo y Aplicaciones (JARCA 07). Jun 2007, Lloret de Mar.
Castillo SM, Gelso ER, Armengol J. “Modelos con Incertidumbre: Identificación deparámetros intervalares y simulación usando cuantificadores.” I Simposio en Modeladoy Simulación de Sistemas Dinámicos (SIMOSI’07) en el II Congreso Español deInformática (CEDI). Sep 2007, Zaragoza.
de la Rosa Josep Lluís, Figueras Albert, Quintero Christian, Ramon Josep Antoni,Ibarra Salvador, and Esteva Santiago. “Outline of Modification Systems”. Studies inComputational Intelligence, Springer Verlag. ISSN: 1860-949X, 2007, Vol. 57, 55 –69 (1.415).
de la Rosa Josep Ll. and Szymanski Boleslaw K., Citation Auctions as a Method toImprove Selection of Scientific Papers, 2nd IEEE International Conference on DIGITALINFORMATION MANAGEMENENT (ICDIM’07) ISBN: 1-4244-1476-8, pp: 479-486,October 29 – 31, 2007, Lyon, FRANCE.
de la Rosa Josep Lluis and Szymanski Boleslaw K., Citation Auctions as a Methodto Improve Selection and Presentation of Scientific Papers, 2nd International Conferenceon Persuasive Technology, 27-28 April 2007, Stanford University, Palo Alto, California
del Acebo Esteve, Hormazábal Nicolás, and de la Rosa Josep Lluís, Beyond Trust.Fuzzy Contextual Corrective Filters for Reliability Assessment in MAS. Application tothe ART Testbed, Conference & ART Competition, Sixth International Joint Conferenceon Autonomous Agents and Multiagent Systems (AAMAS'07), May 14-18, 2007, Hawaii,the USA.
Del Bue Alessio, Lladó Xavier and Agapito Lourdes. “Segmentation of Rigid Motionfrom Non-rigid 2D Trajectories”. In Iberian Conference on Pattern Recognition andImage Analysis, Spain (Girona).
Deniz Dervis Z., Marzo Jose L., Stefanova Sylvia, Thiriet Jean-Marc. "Cataloguing andQuality Assessment of Some Resources in EIE Available Through the Internet",Published at 18th EAEEIE Annual Conference, Innovation in Education for Electricaland Information Engineering (EIE). Prague, July 2007. July 2007.
El-Fakdi Andrés, Carreras Marc and Ridao Pere. “Direct gradient-based reinforcmentlearning for robot behaviour learning”. Informatics in control automation and roboticsII, Portugal.
Fernandez Giangreco José M., Vila Pere, Calle Eusebi, Marzo Jose L. "Design of VirtualTopologies using the Elitist Team of Multiobjective Evolutionary Algorithms", Publishedat International Symposium on Performance Evaluation of Computer and Telecommuni-cation Systems (SPECTS). Society for Modeling and Simulation International (SCS).ISBN # 1-56555-317-9. San Diego. July 2007.
Ferrer Jordi, Elibol Armagan, Delaunoy Olivier, Gracias Nuno and Garcia Rafael. “Large-Area Photo-Mosaics Using Global Alignment and Navigation Data”. MTS/IEEE OCEANSConference Vancouver, Canada (Vancouver).
3938
IIiA RESEARCH REPORT’07
Bosch, Anna, Muñoz, Xavi and Freixenet, Jordi. ”Segmentation and description ofnatural outdoor scenes”. Image and Vision Computing, 2007, Volume 25, Nr 8, 727-740.
Bosch, Anna, Muñoz, Xavier and Marti, Robert. ”Which is the best way to organize/classifyimages by content?”. Image and Vision Computing, 2007, Volume 25, Nr 6, 778-791.
Bose P., Coll Huratdo N.F. and Sellarès J.A. “A General Online Approximation Algorithmfor Embedded Plane Graphs with Applications”. International Journal of ComputationalGeometry and Applications, Volume 17, Issue 6, pp 529-554, 2007.
Calderón G, Armengol J, Vehí J, Gelso E. Dynamic Diagnosis Based on IntervalAnalytical Redundancy Relations and Signs of the Symptoms. AI COMMUNICATIONS(ISSN: 0921-7126), 20(1): 39-47. 2007, IOS Press.
Camacho O, Rojas R, García-Gabín W. Some Long Time Delay Sliding Mode ControlApproaches. ISA Transactions (ISSN: 0019-0578), 46(2): 95-105. 2007, ElsevierScience Inc.
Carreras, Marc, Yuh,Junku, Batlle, Joan and Ridao, Pere. “Application of SONQL forreal-time learning of robot behaviours”. Robotics and Autonomous Systems, 2007,Volume 5, Nr 8, 628-642.
Carreras, Marc, Palomeras, Narcís, Ridao, Pere and Ribas, David. “Design of a MissionControl System for an AUV”. International Journal of Control, 2007, Volume 80, Nr7, 993–1007.
Carrillo C., de la Rosa J. Ll., and Canals A. “Towards a Knowledge Economy”.International Journal of Community Currency Research, ISSN 1325-9547, Volume 11,pp: 84-97, 2007.
Castro, Francesc, Patow, Gustavo, Sbert, Mateu, Halton, John H. “Fast GPU-basedreuse of paths in radiosity”. Monte Carlo Methods and Applications, Volume 13, Nr4, pp: 253-273, 2007.
Castro, F.; Patow, G.; Sbert, M.; Halton, J. H. “Fast GPU-based reuse of paths inradiosity”. Monte Carlo Methods and Applications,Volume: 13, Issue: 4, Cover date:November 20, Pages: 253-273 (2007).
César Barta, Joaquim Meléndez, Joan Colomer. “Off line Diagnosis of Ariane flightsusing PCA”. Space Technology (Lister Editors), 2007, Volume 27, Nr 2, In press.
Cobos Carlos, Niño Miguel, Mendoza Martha, Fabregat Ramon and Gomez Luis."Learning Management System Based on SCORM, Agents and Mining", Publishedat WISE 2007. Lecture Notes in Computer Science 4831 Springer 2007, ISBN 978-3-540-76992-7. pp. 298-309. Nancy (France). 3-7. December 2007.
Coll N., Fort M., Madern N. and Sellarès J.A. “Multi-visibility maps of triangulatedterrains”. International Journal of Geographical Information Science, Vol. 21, No. 10,pp 1115-11134, 2007.
de la Rosa J. Ll., and Szymansky B. K., “Selecting Scientific Papers for Publicationvia Citation Auctions”. IEEE Magazine in Intelligent Systems ISSN 1541-1672, Volume22, n. 6, pp: 16-20, November/Desember 2007.
de la Rosa Josep Lluís, and Muñoz Israel. “Learning and Adaptation in PhysicalHeterogeneous Teams of Robots”. Journal of Physical Agents ISSN: 1888-0258,Volume 1, pp: 9-18, September 2007.
de la Rosa Josep Lluís, Figueras Albert, Quintero Christian, Ramon Josep Antoni,Ibarra Salvador, and Esteva Santiago. “Outline of Modification Systems”. STUDIESIN COMPUTATIONAL INTELLIGENCE ISSN: 1860-949X, Springer Verlag, Volume 57,pp: 231-24, June 2007.
Del Bue, Alessio, Lladó, Xavier and Agapito, Lourdes. “Segmentation of Rigid Motionfrom Non-rigid 2D Trajectories”. Lecture Notes in Computer Science, 2007, Volume4477, 491-498.
Diez Y., Sellarés J. Antoni. “Efficient Colored Point Set Matching Under Noise”. ICCSA2007, Lecture Notes on Computational Science 4705, pp. 26-40, Springer-Verlag, 2007.
Fàbrega Lluís, Jové Teodor, Vilà Pere, Marzo Josep Lluís. “A guaranteed minimumthroughput service for TCP flows using measurement-based admission control",Published at International Journal of Communication Systems (IJCS), vol. 20, no. 1,pàg. 43-63, John Wiley & Sons, Ltd, ISSN 1074-5351. January 2007.
Flórez J, Sbert M, Sainz MA, Vehí J. Guaranteed Adaptive Antialiasing using IntervalArithmetic. LECTURE NOTES IN COMPUTER SCIENCE (ISSN: 0302-9743), 4488:166-169. 2007, Springer Berlin.
Freixenet, Jordi, Oliver, Arnau, Lladó, Xavier and Martí, Robert. ”Mass Eigendetectionand the Benefits of Introducing Breast Density Information”. International Journal ofComputed Aided Radiology and Surgery, 2007, Volume 2, Nr 1, 332-334.
Gelso E, Castillo SM, Armengol J. “Diagnosis based on Interval Analytical RedundancyRelations and Signs of the Symptoms.” IFAC International Workshop on IntelligentManufacturing Systems (IMS’07). May 2007, Alacant (Spain).
Gleason, Arthur, Lirman, Diego, Williams, Dana, Gracias, Nuno, Gintert, Brooke,Madjidi Hussein, Reid, Pam, Boynton, Chris, Negahdaripour, Shahriar, Miller, Margaretand Kramer, Phil. “Documenting hurricane impacts on coral reefs using two-dimensionalvideo-mosaic technology”. Marine Ecology, 2007, Volume 28, Nr 2, 54-258.
Huerta M. K., Hesselbach X., Fabregat R., Padilla J. J. Ravelo O. "Reducción de CongestiónMPLS Mediante Técnicas de Optimización de Flujos en la Red", Published at IEEE LatinAmerica Transactions. Volume 5, Issue 5, Page(s):352 - 359. September 2007.
Innocenti, Bianca, López, Beatriz and Salvi, Joaquim. “A multi-agent architecture withcooperative fuzzy control for a mobile robot”. Robotics and Autonomous Systems,2007, Volume 55, Nr 12, 881-891.
Jia L, Luo N, Yuan JQ. A model based estimation of the profit function for the continuous
fermentation of baker’s yeast. Chemical Engineering and Processing (ISSN: 0255-2701). Elsevier Science Switzerland.
Lirman, Diego, Gracias, Nuno, Gintert, Brooke, Gleason, Arthur, Reid, Pam,Negahdaripour, Shahriar, and Kramer, Phil. “Development and application of a video-mosaic survey technology to document the status of coral reef communities”.Environmental Monitoring and Assessment, 2007, Volume 125, Nr 1, 59-73.
Llanos David, Staroswiecki Marcel, Colomer Joan, Meléndez Joaquim. “TransmisiónDelays in Residual Computation”. IET Control Theory & Applications (former IEE Proc.Control Theory & Applications), 2007, Volume 1, Nr 5, 1471-1476
Lopez, B., Innocenti, B., Busquets, D. “A Multiagent System to Support AmbulanceCoordination of Urgent Medical Transportation”. IEEE Intelligent Systems, 2007 (toappear).
Martí, Robert, Martí, Joan, Freixenet, Jordi, Vilanova, Joan Carles and Barceló, Joaquim.“Optimally Discriminant Moments for Speckle Detection in Real B-Scan Images”.Pattern Recognition and Image Analysis Lecture Notes in Computer Science, 2007,Volume 4478, 242 – 249.
Marti, Robert, Arnau, Oliver, Raba, David and Freixenet Jordi. ”Breast skin-linesegmentation using contour growing”. Lecture Notes in Computer Science, 2007,Volume 4478, 564-571.
Martí, Robert, Martí, Joan, Freixenet, Jordi, Vilanova, Joan Carles and Barceló, Joaquim.“Robust Speckle Detection in Ultrasound Images. Evaluation Aspects”. The InternationalSociety for Optical Engineering, 2007,Volume 6356, 63560P-1 – 63560P-11.
Marzo Jose L., Calle Eusebi, Vilà Pere, Urra Anna. "Performance evaluation of minimuminterference routing in network scenarios with protection requirements", Publishedat VOL 30/16. Pp 3161-3168. Computer Communication, ISSN 0140-3664. Elsevier.November 2007.
Michalowski, M., Sabanovic, S., DiSalvo, C., Busquets, D., Hiatt, L., Melchior, N.,Simmons, R. “Socially Distributed Perception: GRACE plays social tag at AAAI 2005”.Autonomous Robots, 2007, Volume 22, Nr 4, 385-397.
Mora JJ, Melendez J., Carrillo G.. “Comparison of impedance based fault locationmethods for power distribution systems“, Electric Power Systems Research (Elsevier),2007, In press (Available on line 20 July 2007).
Muntaner-Perich E., de la Rosa J.Ll.. “Towards a Formalisation of Dynamic ElectronicInstitutions”, ISSN, LNCS Coordination, Organizations, Institutions, and Norms inAgent Systems III, Springer Verlag, Volume 4870, pp: 97-109, 2007.
Pan X., Gillies M., Sezgin T. M., Loscos C. “Expressing Complex Mental States ThroughFacial Expressions - Affective Computing and Intelligent Interaction”. Lecture notesin computer science, Springer Berlin Heidelberg, Vol. 4738, pp 745-746, 2007. ISBN978-3-540-74888-5.
Pacheco, LLuís, Cufí, Xavi and Cobos, Javier. “Constrained Monocular ObstaclePerception with Just One Frame”. Lecture Notes in Computer Science, 2007, Volume4477, 611-619.
Pacheco, Lluis and Luo, Ningsu. “Mobile Robot Local Predictive Control Using a VisualPerception Horizon”. International journal of Factory Automation, Robotics and SoftConputing, 2007, Volume 2, 73-81.
Pacheco, Lluís and Luo, Ningsu. “Mobile Robot Local Predictive Control underPerception Constraints“. International journal of Factory Automation, Robotics andSoft Conputing, 2007, Volume 4, 40-48.
Patow, G.; Pueyo, X. and Vinacua, A. “User-Guided Inverse Reflector Design”. Computers& Graphics, Volume 31, Issue 3, June 2007, Pages 501-515 Elsevier. Netherlands.
Prados, Ferran, Boada, Imma, Feixas, Miquel, Prats, A., Blasco, G, Pedraza, S., Puig,J. “DTIWeb: A,Web-based Framework for DTI data Visualization and Processing”.Lecture Notes in Computer Science (ICCSA’07), 2007.
Raba, David, Peracaula, Marta, Martí, Robert and Martí, Joan. “On the Detection ofRegions-of-Interest in Dynamic Contrast-Enhanced MRI”. Pattern Recognition andImage Analysis Lecture Notes in Computer Science, 2007, Volume 4477, 129 – 136.
Ribas, David, Ridao, Pere, Neira, José and Tardós, Joan Domingo. “Line extractionfrom mechanically scanned imaging sonar”. Lecture Notes in Computer Science,2007, Volume 4477, 322-329.
Rigau, Jaume, Feixas, Miquel, Sbert, Mateu. “A generalised mutual-information-basedoracle for hierarchical radiosity”. Lecture Notes in Computer Science (ICCS’07), pp:105-113, 2007.
Obaidat Mohammad, Marzo Jose L. "Advances in Communication Networking",Accepted at Guest Editorial. Special Issue. Computer Communications 30 (2007)2995–2999. ISSN 0140-3664. Elsevier. November 2007.
Oliver, Arnau, Lladó, Xavier, Martí, Joan, Martí, Robert and Freixenet, Jordi. “FalsePositive Reduction in Breast Mass Detection using Two-Dimensional PCA”. PatternRecognition and Image Analysis, Lecture Notes in Computer Science, 2007, Volume4478, 154 – 161.
Oliver, Arnau, Lladó, Xavier, Freixenet, Jordi and Martí, Joan. ”False Positive Reductionin Mammographic Mass Detection using Local Binary Patterns”. Lecture Notes inComputer Science, 2007, Volume 4791, 286-293.
Orghidan, Radu, Mouaddib, El Mustapha, Salvi, Joaquim, JJ Serrano. “CatadioptricSingle Shot Rangefinder for Textured Map Building in Robot Navigation”. IET ComputerVision, 2007, Volume 1, Nr 2, 43-53.
Pacheco L, Luo N, Ferrer J. “Mobile robot local predictive control under perceptionconstraints”. INTERNATIONAL JOURNAL OF FACTORY AUTOMATION, ROBOTICS AND
SOFT COMPUTING (ISSN: 1828-6984). Pp 273-281. 2007, International Society forAdvanced Research.
Salvi, Joaquim, Matabosch, Carles, Fofi, David and Forest, Josep. “A Review of RecentRange Image Registration Methods with Accuracy Evaluation”. Image and VisionComputing, 2007, Volume 25, Nr 5, 578-596.
Shmilovici A., Bakir G.H., Figueras A., de la Rosa J.L.. “On the Simplification of anExamples Based Controller with Support Vector Machines”. Control and IntelligentSystems. Acta Press (Indexed by the American Mathematical Society - MathematicalReviews, Cambridge Scientific Abstracts, Compendex (Engineering Information), FIZKarlsruhe and INSPEC), ISSN: 1480-1752, Volume 35, pp: 55-61, 2007.
Solano Fernando, Caro L F., de Oliveira Jaudelice C., Fabregat Ramon, Marzo JoseLuis. "G+: Enhanced Traffic Grooming in WDM Mesh Networks using Lighttours",Published at IEEE Journal on Selected Areas in Communications. ISSN 0733-8716,Vol 25, num. 5, pp 1034-1047. June 2007.
Tesouro Montse and Puiggalí Juan. "The computer helps in the acquisition of educationalknowledge.", Published at Interactive Educational Multimedia, 14 (April 2008),pp102-115. May 2007.
Umenhoffer Tamás, Patow Gustavo, Szirmay-Kalos László. “Robust Multiple SpecularReflections and Refractions”. GPU Gems 3. Chapter 17. Addison-Wesley Professional,2007, (ISBN 978-0321515261), pp. 387-408.
Trias, Dani, Garcia, Rafael, Costa, Josep, Blanco, Norbert and Hurtado, Jorge Eduardo.“Quality control of CFRPs by means of digital image processing and statistical pointpattern analysis”. Composites Science and Technology, 2007, Volume 67, Nr 11-12,2438-2446.
Urra Anna, Calle Eusebi, Marzo Jose L., Vila Pere. "An Enhanced Dynamic MultilayerRouting for Networks with Protection Requirements", Published at Journal ofCommunications and Networks, Vol. 9, Number 4, December 2007. December 2007.
Xu, Qing, Sbert, Mateu, Feixas, Miquel, Zhang, Jianfeng. “AM-GM Difference BasedAdaptive Sampling for Monte Carlo Global Illumination”. Lecture Notes in ComputerScience (ICCSA’07), Volume 2, 2007.
Xu, Qing, Sbert, Mateu. “A new way to reusing paths”. Lecture Notes in ComputerScience (ICCSA’07), Volume 2, pp: 741-750, 2007.
Zambrano D, García-Gabín W, Camacho EF. A Heuristic Predictive Logic ControllerApplied to Hybrid Solar Air Conditioning Plant. LECTURE NOTES IN COMPUTERSCIENCE (ISSN: 0302-9743), 4413: 793-796. 2007, Springer Verlag, Berlin Heidelberg.
Zapateiro M, Luo N. “Parametric and non-parametric characterization of the dynamicsof a shear-mode magnetorheological damper”. JOURNAL OF VIBROENGINEERING(ISSN: 1392-8716), 9: 14-18. 2007, Fondai Lithuania.
Publications in ConferencesBaldiris Silvia, Fabregat Ramón, Santos Olga. "Modeling Competencies upon dotLRN",Published at OpenACS and LRN Spring Conference. Vienna. April 2007.
Baldiris Silvia, Santos Olga, Barrera Carmen, Velez Jeimy, Boticario Jesús G. andFabregat Ramon. "Linking educational specifications and standards for dynamicmodelling in ADAPTAPlan", Published at International Workshop on Representationmodels and Techniques for Improving e-Learning: Bringing Context into Web-basedEducation. Roskilde University, Denmark, 20-24. August 2007.
Baldiris Silvia, Santos Olga C., Boticario Jesús G., Fabregat Ramón. "Modelado decursos mediante el uso intensivo de estándares educativos para dar soporte aadaptaciones dinámicas", Published at Simposio Nacional de Tecnologías de laInformación y las Comunicaciones en la Educación (SINTICE 2007). Zaragoza (España).11-14. September 2007.
Baldiris Silvia M., Santos Olga C., Fabregat G Ramón, Boticario Jesus G.. "Modeladode Competencias en Ambientes Virtuales de Aprendizaje", Published at 3 CongresoInternacional sobre el Enfoque Basado en Competencias: “Diseño Curricular porCompetencias y Gestión de la Calidad del Aprendizaje”. October 2007.
Baldiris Navarro Silvia Margarita, Vélez Ramos Jeimy Beatriz, Fabregat Gesa Ramón."Tendencias en la Investigación acerca de los Sistemas de Gestión de Aprendizajes",Published at CONGRESO INTERNACIONAL: COMPETENCIAS, CICLOS PROPEDÉUTICOSY APRENDIZAJE VIRTUAL. November 2007.
Batlle Elisabeth, Matabosch Carles and Salvi Joaquim. “Summarizing Image/SurfaceRegistration for 6DoF Robot/Camera Pose Estimation”. 3rd Iberian Conference onPattern Recognition and Image Analysis, Spain (Girona).
Batlle Elisabeth, Matabosch Carles, and Salvi Joaquim. “Overview of 3D RegistrationTechniques Including Loop Minimization for the Complete Acquisition of LargeManufactured Parts and Complex Environments”. IEEE/SPIE 8th InternationalConference on Quality Control by Artificial Vision, France (Le Creusot)
Bondia J, García-Gabín W, Vehí J, Tarín C, Calm R. “Online Detection of TherapeuticallyWrong Measurements of Continous Glucose Monitors Using Support Vector Machines.”Diabetes Technology Meeting. Sep 2007, San Francisco (USA).
Bondia J, Tarín C, Calm R, García-Jaramillo M, Vehí J, García-Gabín W. “Predicciónde glucemia en pacientes con diabetes tipo 1 ante incertidumbre.” I Simposio enModelado y Simulación de Sistemas Dinámicos (SIMOSI’07) en el II Congreso Españolde Informática (CEDI). Sep 2007, Zaragoza.
Bosch Anna, Zisserman Andrew, Muñoz Xavier. ”Image classification using randomforests and ferns”. International Conference on Computer Vision, Brazil (Rio de Janeiro)
Bosch Anna, Zisserman Andrew, Muñoz Xavier. ”Representing shape with a spatial
pyramid kernel”. ACM International Conference on Image and Video Retrieval, TheNetherlands (Amsterdam).
Bosch Carles, Patow Gustavo. “Real Time Scratches and Grooves”. XVII CongresoEspañol de Informática Gráfica (CEIG '07), Zaragoza, Spain, September 2007.
Bueno A, Vilà P., Fabregat R. ”Multicast Extension of Unicast Charging for QoSServices", Published at Fourth European Conference on Universal Multiservice Networks- European Conference on Universal Multiservice Networks (ECUMN'07) Tolouse,France. February 2007.
Bueno A., Guadall C, Marzo J L, Harle D. "TRiEM: An application for MS TeleRehabilita-tion", Published at First International Conference of E-medical Systems. October 2007.
Calderón-Espinoza G, Rodríguez-Martínez A, Armengol J, Vehí J, Sainz MA. “HeatRate Supervision of Fossil Power Plant by Modal Interval Analysis.” 7th World Congressof Chemical Engineering (WCCE 07). Jul 2007, Glasgow (Scotland).
Calderón-Espinoza Gabriela, Armengol Joaquim, Vehí Josep, Gelso Esteban R. “Dynamicdiagnosis based on interval analytical redundancy relations and signs of the symptoms”.AI Communications, May 1, 2007, Vol. 20, 39 – 47 (0.469).
Calle Eusebi, Marzo Jose L., Urra Anna, Vilà Pere. "Suitability of Minimum InterferenceRouting Schemes with Protection", Published at DRCN 2007, La Rochelle, France.October 2007.
Calm R, García-Jaramillo M, Vehí J, Bondia J, Tarín C, García-Gabín W. “Predictionof Glucose Excursions under Uncertain Parameters and Food Intake in IntensiveInsulin Therapy for Type 1 Diabetes Mellitus.” 29th Annual International Conferenceof the IEEE Engineering in Medicine and Biology Society. Aug 2007, Lyon (France).
Calm R, García-Jaramillo M, Bondia J, Vehí J, Tarín C, García-Gabín W. “Predictionof postprandial glucose under uncertainty in Type 1 Diabetes Mellitus: a comparisonof Interval Methods and Monte Carlo Simulation.” Meeting of the Spanish SystemsBiology Network (REBS). Nov 2007, Murcia.
Calm R, García-Jaramillo M, Vehí J, Bondia J, Tarín C, García-Gabín W. “SimulaciónIntervalar del Metabolismo de la Glucosa en Pacientes con Diabetes Mellitus tipo I.”IX Jornadas de Automatización del Razonamiento Cualitativo y Aplicaciones (JARCA07). Jun 2007, Lloret de Mar.
Camacho Oscar, Rubén Rojas, García-Gabín Winston. “Some Long Time Delay SlidingMode Control Approaches”. ISA Transactions, 2007 (0.300).
Castelló, P., Sbert, M., Chover, M., Feixas, M. “Viewpoint Entropy-Driven Simplification”,WSCG 2007, FULL Papers proceedings, ISBN 978-80-86943-01-5. Plzen (CzechRepublic), February 2007.
Castillo SM, Gelso ER, Calm R, Armengol J. “Estimación de Parámetros Intervalarespara la Detección Robusta de Fallos.” IX Jornadas de Automatización del RazonamientoCualitativo y Aplicaciones (JARCA 07). Jun 2007, Lloret de Mar.
Castillo SM, Gelso ER, Armengol J. “Modelos con Incertidumbre: Identificación deparámetros intervalares y simulación usando cuantificadores.” I Simposio en Modeladoy Simulación de Sistemas Dinámicos (SIMOSI’07) en el II Congreso Español deInformática (CEDI). Sep 2007, Zaragoza.
de la Rosa Josep Lluís, Figueras Albert, Quintero Christian, Ramon Josep Antoni,Ibarra Salvador, and Esteva Santiago. “Outline of Modification Systems”. Studies inComputational Intelligence, Springer Verlag. ISSN: 1860-949X, 2007, Vol. 57, 55 –69 (1.415).
de la Rosa Josep Ll. and Szymanski Boleslaw K., Citation Auctions as a Method toImprove Selection of Scientific Papers, 2nd IEEE International Conference on DIGITALINFORMATION MANAGEMENENT (ICDIM’07) ISBN: 1-4244-1476-8, pp: 479-486,October 29 – 31, 2007, Lyon, FRANCE.
de la Rosa Josep Lluis and Szymanski Boleslaw K., Citation Auctions as a Methodto Improve Selection and Presentation of Scientific Papers, 2nd International Conferenceon Persuasive Technology, 27-28 April 2007, Stanford University, Palo Alto, California
del Acebo Esteve, Hormazábal Nicolás, and de la Rosa Josep Lluís, Beyond Trust.Fuzzy Contextual Corrective Filters for Reliability Assessment in MAS. Application tothe ART Testbed, Conference & ART Competition, Sixth International Joint Conferenceon Autonomous Agents and Multiagent Systems (AAMAS'07), May 14-18, 2007, Hawaii,the USA.
Del Bue Alessio, Lladó Xavier and Agapito Lourdes. “Segmentation of Rigid Motionfrom Non-rigid 2D Trajectories”. In Iberian Conference on Pattern Recognition andImage Analysis, Spain (Girona).
Deniz Dervis Z., Marzo Jose L., Stefanova Sylvia, Thiriet Jean-Marc. "Cataloguing andQuality Assessment of Some Resources in EIE Available Through the Internet",Published at 18th EAEEIE Annual Conference, Innovation in Education for Electricaland Information Engineering (EIE). Prague, July 2007. July 2007.
El-Fakdi Andrés, Carreras Marc and Ridao Pere. “Direct gradient-based reinforcmentlearning for robot behaviour learning”. Informatics in control automation and roboticsII, Portugal.
Fernandez Giangreco José M., Vila Pere, Calle Eusebi, Marzo Jose L. "Design of VirtualTopologies using the Elitist Team of Multiobjective Evolutionary Algorithms", Publishedat International Symposium on Performance Evaluation of Computer and Telecommuni-cation Systems (SPECTS). Society for Modeling and Simulation International (SCS).ISBN # 1-56555-317-9. San Diego. July 2007.
Ferrer Jordi, Elibol Armagan, Delaunoy Olivier, Gracias Nuno and Garcia Rafael. “Large-Area Photo-Mosaics Using Global Alignment and Navigation Data”. MTS/IEEE OCEANSConference Vancouver, Canada (Vancouver).

40
Ferrer Jordi, Gracias Nuno, Delaunoy Olivier and Garcia Rafael. “Creating Large andAccurate Mosaics of the Mid-Atlantic Ridge”. International Workshop on MarineTechnology Vilanova i la Geltrú, Spain (Vilanova i la Geltrú).
Flórez J., Sbert Mateu, Sainz M. A., Vehí Josep. “Guaranteed Adaptive Antialiasingusing Interval”. Arithmetic Lectures Notes in Computer Science, International Conferenceon Computational Science - Sixth International Workshop on Computer Graphics andGeometric Modeling, Beijing (China), May 27, 2007.
Fort M., Sellarès J.A.. “Generalized Higher-Order Voronoi Diagrams on PolyhedralSurfaces“. Proc. 4th International Symposium on Voronoi Diagrams in Science andEngineering, IEEE Computer Society, Wales, UK, pp 74-83, 2007.
Freixenet Jordi, Marzo Jose L, Soler Josep. "Experiencias en un plan piloto deadaptación al EEES: Hoja de ruta para coordinadores", Published at Actas de las XIIIJornadas de Enseñanza Universitaria de la Informática (JENUI 2007), pp 57-64.Teruel. July 2007.
Freixenet Jordi, Oliver Arnau, Lladó Xavier, Martí Robert and Martí Joan. “MassEigendetection and the Benefits of Introducing Breast Density Information”. InternationalJournal of Computer Assisted Radiology and Surgery, Germany (Berlin).
Freixenet Jordi, Marzo Jose L, Soler Josep. “Experiencias en un plan piloto deadaptación al EEES: Hoja de ruta para coordinadores”. Actas de las XIII Jornadas deEnseñanza Universitaria de la Informática (JENUI 2007), Spain (Teruel).
García-Gabín W, Dorado F, Bordons C. “Comparative analysis of sliding mode andVolterra model predictive controllers applied to a benchmark CSTR non-minimumphase reactor.” European Control Conference (ECC’07). Jul 2007, Kos (Greece).
García-Jaramillo M, Ruiz M, Colomer J, Meléndez J. “Multiway Principal ComponentAnalysis and Case Base Reasoning methodology for abnormal situation detection ina Nutrient Removing SBR.” European Control Conference (ECC’07). Jul 2007, Kos(Greece).
García Guillem de Marina, Ribas David and Ridao Pere. “A global localization systemfor structured environments using an imaging sonar”. IFAC Conference on Controlin Marine Systems, Croacia (Bol).
Garcia I., Patow G., Sbert M., and Szirmay-Kalos L. “Multi-layered indirect texturingfor tree rendering“. Eurographics Workshop on Natural Phenomena 2007, D. Ebert,S. Mérillou (Eds).
García Oscar, Vehí Josep, Campos e Matos Jose, Abel Hernández António & CasasJoan Ramon. “Structural Assessment Under Uncertain Parameters Via IntervalAnalysis”. Journal of Computational and Applied Mathematics (Article in Press), FiniteElement Methods in Engineering and Science (FEMTEC 2006), 2007.
Gelso E, Castillo SM, Armengol J. “Robust fault detection using consistency techniquesfor uncertainty handling.” IEEE International Symposium on Intelligent Signal Processing(WISP'07). Oct 2007, Alcalá de Henares, Madrid (Spain).
Gelso ER, Castillo SM, Armengol J. “Construyendo una Plataforma para Deteccióny Diagnosis de Sistemas Dinámicos Basada en Análisis Intervalar Modal y RedundanciaAnalítica.” IX Jornadas de Automatización del Razonamiento Cualitativo y Aplicaciones(JARCA 07). Jun 2007, Lloret de Mar.
González Francisco, Feixas Miquel and Sbert Mateu. “View-based Shape Similarityusing Mutual Information Spheres”. Eurographics'07 Short Paper, Prague, CzechRepublic, September, 3-7, 2007.
González Francisco, Sbert Mateu and Feixas Miquel. “An Information-Theoretic AmbientOcclusion”. International Symposium on Computational Aesthetics in Graphics,Visualization, and Imaging. Banff (Canada), 2007.
González Gustavo, de la Rosa Josep Lluís, Montaner Miquel, Delfín Sonia, EmbeddingEmotional Context in Recommender Systems, IEEE 3rd International Workshop onWeb Personalisation Recommender Systems and Intelligent User Interfaces (WPRSIUI'07),Istambul, Turkey, April 16-20, 2007.
Harle D., Albarrak S., Urra A., Calle E., Marzo J. L.. "Service Level AgreementFramework for Differentiated Survivability in GMPLS-based IP-over-Optical Networks",Published at IEEE International Conference on Communications (ICC) proceedings,ISBN 1-4244-0353-7, Glasgow (UK). June 2007.
Herrero P, Palerm C, Dassau E, Zisser H, Jovanovic L A. “Glucose Absortion ModelLibrary of Mixed Meals for in silico Evaluation of Artificial Beta Cell Control Algorithms.”Diabetes Technology Meeting. Sep 2007, San Francisco (USA).
Ibarra S., Quintero C., Ramón J. A., de la Rosa J. Ll., Castán J. A., PAULA: Multi-agent Architecture for Coordination of Intelligent Agent Systems, The European ControlConference, ECC’07, Conference, Julio 2-5, 2007, Kos, Greece.
Jia Horgan Jonathan, Toal Daniel, Ridao Pere and Garcia Rafael. “Real-time visionbased AUV navigation system using a complementary sensor suite”. IFAC Conf. onControl Applications in Marine Systems (CAMS'07), Croatia (Bol).
Khosravi A, Armengol J, Gelso E. “An Interval Intelligent-based Approach for FaultDetection and Modelling.” IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Jul 2007, London (England).
Khosravi A, Armengol J. “A Hybrid Method for Fault Detection and Modeling usingModal Intervals and ANFIS.” American Control Conference (ACC’07). Jul 2007, NewYork City (USA).
Kudzinava Marina, Garcia Rafael and Martí Joan. “Feature-based Matching of UnderwaterImages”. International Workshop on Marine Technology Vilanova i la Geltrú, Spain(Vilanova i la Geltrú).
Luo N, Rodellar J, Ikhourane F, Zapateiro M. “Modelling, identification and control of
mechatronic systems equipped with smart actuators.” World Forum on Smart Materialand Structures Technology. May 2007, Chongqing and Naijing (China).
L., Luo N., Yuan J.Q. “A model based estimation of the profit function for the continuousfermentation of baker's yeast“. Chemical Engineering and Processing, Nov 2007,1215 – 1222
Luo N, Villamizar R, Vehí J. “Backstepping Control of Nonlinear Building Structureswith Hysteretic and Frictional Dynamics.” European Control Conference (ECC’07). Jul2007, Kos (Greece).
Lladó Xavier, Oliver Arnau, Martí Joan and Freixenet Jordi. "Dealing with false positivereduction in mammographic mass detection”. Medical Image Understanding andAnalysis (MIUA), United Kingdom (Aberystwyth).
Martí Robert, Martí Joan, Freixenet Jordi, Vilanova Joan Carles and Barceló Joaquim.“Robust Speckle Detection in Ultrasound Images. Evaluation Aspects”. SPIE QualityControl by Artificial Vision, France (Le Creusot).
Martí Robert, Oliver Arnau, Raba David and Freixenet Jordi. ”Breast skin-line segmentationusing contour growing”. Iberian Conference on Pattern Recognition and Image Analysis,Spain (Girona).
Marzo J L., Caro L F., Solano F, de Oliveira J., Fabregat R. "Operational Cost Reductionin WDM Networks using Lighttours (invited)", Published at International Conferenceon Transparent Optical Networks (ICTON) proceedings. ISBN 1-4244-1249-8. IEEEcatalog # 07EX1796C. July 2007.
Mérida D., Baldiris S., Fabregat R., Velez J., Huerva D. "A User Model that incorporatescharacteristics of Access Devices in MAS-SHAAD", Published at UM'07- WorkshopTowards User Modelling and Adaptive Systems for All (TUMAS-A). 24. June 2007.
Moeller Briggite, Garcia Rafael and Posch Stefan. “Towards Objective Quality Assessmentof Image Registration Results”. International Conference on Computer Vision Theoryand Applications, Spain (Barcelona).
Molinier Thierry, Fofi David, Gorria Patrick and Salvi Joaquim. “Detection of Surfacesfor Projection texture”. IEEE/SPIE 8th International Conference on Quality Control byArtificial Vision, France (Le Creusot).
Molinier Thierry, Fofi David, Gorria Patrick and Salvi Joaquim. “Projection de Texturesur des Objects 3D Réels“. GRETSI’2007, Colloque du Groupe de Recherche sur leTraitement du Signal et des Images, France (Troyes).
Molinier Thierry, Fofi David, Gorria Patrick and Salvi Joaquim. “Automatic texturemapping on real 3D model”. IEEE Int. Workshop on Projector-Camera Systems,PROCAMS 2007, in conjunction with Computer Vision and Pattern RecognitionWorkshop, USA (Minnesota).
Mujica Luis Eduardo, Vehí Josep and Rodellar José. “A Case Based Reasoningapproach for Damage Assessment in Smart Structures”. III ECCOMAS ThematicConference on Smart Structures and Materials. Jul. 2007, Gdansk (Poland).
Muntaner Perich Eduard, de la Rosa Josep Lluís, Towards a Formalisation of DynamicElectronic Institutions, The AAMAS'07 Workshop on Coordination, Organization,Institutions and Norms in agent systems (COIN'07), May 14-18, 2007, Hawaii, the USA.
Nicosevici Tudor, Garcia Rafael, Negahdaripour Shahriar, Kudzinava Marina and FerrerJordi. “Identification of Suitable Interest Points Using Geometric Photometric Cuesin Motion Video for Efficient 3-D Environmental Modeling”. IEEE International Conferenceon Robotics and Automation (ICRA), Italy (Rome).
Nicosevici Tudor, Garcia Rafael and Gracias Nuno. “Identification of geometricallyconsistent interest points for 3D scene reconstruction”. International Workshop onMarine Technology Vilanova i la Geltrú, Spain (Vilanova i la Geltrú).
Oliver Arnau, Lladó Xavier, Freixenet Jordi and Martí Joan. ”A False Positive Reductionin Mammographic Mass Detection using Local Binary Patterns”. International Conferenceon Medical Image Computing and Computer Assisted Intervention (MICCAI), Austrialia(Brisbane).
Oliver Arnau, Lladó Xavier, Martí Robert, Freixenet Jordi and Zwiggelaar Reyer.“Classifying Mammograms using Texture Information”. In Medical Image Understandingand Analysis, Wales (Aberystwyth).
Oliver Arnau, Lladó Xaxier, Martí Joan, Martí Robert and Freixenet Jordi. “False PositiveReduction in Breast Mass Detection using Two-Dimensional PCA”. Iberian Conferenceon Pattern Recognition and Image Analysis, Spain (Girona).
Oliveros A, Vehí J, Gutiérrez A, García-Gabín W. “Closed Loop Glycemic Control ForCritically Ill Patients: Feasibility Study and Experimental Design.” 4th IEEE InternationalSummer School and Symposium on Medical Devices and Biosensors. Aug 2007,Cambridge (England).
Oliveros A, Vehí J, Gutiérrez A, García-Gabín W. “Closed Loop Glycemic Control forCritically Ill Patients: Feasibility Study and Experimental Design.” ASME 2007 SummerBioengineering Conference. Jun 2007, Keystone, Colorado (USA).
Oliveros A, Vehí J, Gutiérrez A, García-Gabín W. “Control en Lazo Cerrado para Nivelde Glucosa en Pacientes Críticos: Estudio Previo y Propuesta de Protocolo en EnsayosCríticos.” XXVIII Jornadas de Automática. Sep 2007, Huelva.
Pacheco Ll., Luo N. “Mobile robot local predictive control using a visual perceptionhorizon”. Emerging Technologies, Robotics and Control Systems 2007, 217 - 225.
Pacheco Ll., Luo N. “Trajectory planning with control horizon based on narrow localoccupancy grid perception”. Lecture Notes on Control and Information Sciences, 2007.
Pacheco LLuis and Luo N. “Predictive control by local visual data”. 4th InternationalConference on Informatics in Control, Automation and Robotics (ICINCO 2007). May2007, Angers (France).
Pacheco LLuis and Luo N. “Trajectory planning with control horizon based on narrowlocal occupancy grid perception”. 6th International Workshop on Robot Motion andControl. Jun 2007, Bukowy Sworek (Poland).
Palomeras Narcís, Ridao Pere, Carreras Marc. “Defining a Mission Control Language”.Congrés Internacional sobre Tecnologia Marina, 2007, Spain (Vilanova i la Geltrú).
Palomeras Narcís, Ridao Pere, Carreras Marc, Batlle Joan. “A Mission Control Languagefor AUVs”. Control Applications in Marine Systems, 2007, Italy.
Peracaula Marta, Freixenet Jordi, Martí Joan, Martí Josep and Paredes Josep Maria.“Faint compact object detection in wide field interferometric radio images using ahybrid method based on local thresholding and wavelet decomposition”. AstronomicalData Analysis Software and Systems XVII, ASP, United Kingdom (London).
Peracaula Marta, Freixenet Jordi, Martí Joan, Martí Robert and Paredes Josep Maria.“Faint compact object detection in wide field interferometric radio images using ahybrid method based on local thresholding and wavelet decomposition”. AstronomicalData Analysis Software and Systems XVII, United Kingdom (London).
Prados Ricard, Neumann Lazlo, Cufí Xavi and Garcia Rafael. “Visually PleasantBlending Techniques in Underwater Mosaicing”. International Workshop on MarineTechnology Vilanova i la Geltrú, Spain (Vilanova i la Geltrú).
Puiggali Joan, Jové Teo, Segovia Juan, Marzo Josep Lluís. "Master/Slave SpeculativeParallelization Architecture for Computer Clusters", Published at 2007 ACS/IEEEInternational Conference on Computer Systems and Applications (AICCSA ‘2007).May 2007.
Quintero M. Christian G., Ibarra M.Salvador, De la Rosa Josep Ll. and Vehí Jose.Introspection on Control-grounded Capabilities. A Task Allocation Case Study in RobotSoccer. International Conference on Informatics in Control, Automation and Robotics(ICINCO 2007) May 2007, Angers (France).
Quintero M.Christian G., Busquets Dídac, de la Rosa Josep Ll. and Vehí Josep,Introspection on Control-grounded Capabilities. Relevance in Task Allocation Problem.The European Control Conference ECC’07, Jul 2007, Kos, Greece.
Raba David, Peracaula Marta, Martí Robert and Marti Joan. “On the detection ofregions-of-interest in dynamic contrast-enhanced MRI”. 3rd Iberian Conference onPattern Recognition and Image Analysis (IbPRIA'07), Spain (Girona).
Ribas David, Palomeras Narcís, Ridao Pere, Carreras Marc and Hernandez Emili.“ICTINEU AUV wins the first sauc-e competition”. IEEE International Conference onRobotics and Automation, Italia (Roma).
Ribas David, Ridao Pere, Neira José and Tardós Juan Domingo. “A method for extractinglines and their uncertainty from acoustic underwater images”. 6th IFAC Symposiumon Intelligent Autonomous Vehicles, France (Toulouse)
Ribas David, Ridao Pere, Tardós Juan Domingo and Neira José. “Underwater SLAMin a marina environment”. IEEE/RSJ International Conference on Intelligent Robotsand Systems, EUA (San Diego).
Ribas David, Ridao Pere, Neira José and Tardós Juan Domingo. “Underwater SLAMfor manmade environments”. Workshop internacional sobre tecnología marina,MARTECH 07, Spain (Vilanova i la Geltrù).
Ribas David, Ridao Pere, Neira José, Tardos and Domingo Joan. “Line extraction frommechanically scanned imaging sonar”. 3rd Iberian Conference on Pattern Recognitionand Image Analysis, Spain (Girona).
Ridao Pere, Carreras Marc, Hernandez Emili and Palomeras Narcís. “UnderwaterTelerobotics for Collaborative Research”. Advances in Tele-robotics.
Rigau Jaume, Feixas Miquel, Sbert Mateu. ”Conceptualizing Birkhoff's AestheticMeasure Using Shannon Entropy and Kolmogorov Complexity”, ComputationalAesthetics 2007: 105-112.
Rodellar J, Vehí J, Mujica LE. “Experimental Applications of a Case Based ReasoningMethod for Structural Damage Assessment.” World Forum on Smart Material andStructures Technology. May 2007, Chongqing and Naijing (China).
Ruiz Ordóñez Ronald Uriel, de la Rosa Josep Lluís, Guzmán Obando Javier, StrategyRecommender Agents (ALEX) - the Methodology, Sixth International Joint Conferenceon Autonomous Agents and Multiagent Systems (AAMAS'07), May 14-18, 2007,Hawaii, the USA.
Santos Olga C., Baldiris Silvia, Velez Jeimy, Boticario Jesús G., Fabregat Ramón."Dynamic Support in ADAPTAPlan: ADA+", Published at Conferencia de la AsociaciónEspañola para la Inteligencia Artificial (CAEPIA). Salamanca. 12-16. November 2007.
Sbert Mateu, Feixas Miquel, Rigau Jaume, Chover Miguel, Viola Ivan. “Applicationsof Information Theory to Computer Graphics”, Eurographics Tutorial, 2007.
Solano F., Van Caenegem R., Colle D., Marzo J., Fabregat R.. "Label Merging in All-Optical Label Swapping Networks", Published at VI Workshop in G/MPLS networks.April 2007.
Solano F, Van Caenegem R, Colle D, Pickavet M, Marzo J L, Fabregat R (Invited)."Routing and Label Stacking in All-Optical Label", Published at Networks and OpticalCommunications (NOC) proceedings, ISBN: 978-91-633-0869-7. Stockholm. June 2007.
Soler Josep, Boada Imma, Prados Ferran, Poch Jordi, Fabregat Ramon. "An AutomaticCorrection Tool for Relational Algebra Queries", Accepted at International Conference onComputational Science and Its Applications (ICCSA 2007). Malaysia, 26-29 August 2007.
Suárez B.Silvia A., Quintero M.Christian G., de la Rosa Josep Lluis, Improving TasksAllocation and Coordination in a Rescue Scenario, The European Control ConferenceECC’07, Conference, Julio 2-5, 2007, Kos, Greece.
Urra Anna, Calle Eusebi, Marzo Jose L., Vila Pere. "Incorporating Protection Mechanismsin the Dynamic Multi-Layer Routing Schemes", Published at Ad Hoc and SensorNetworks, Wireless Networks, Next Generation Internet, NETWORKING 2007, Atlanta,GA, US. Lecture Notes in Computer Science. 4479, pp. 786-796. May 2007.
Vélez Jeimy, Fabregat Ramon, González Gustavo. "Entornos de Aprendizaje VirtualAdaptativos soportados por Máquinas de Soporte Vectorial", Accepted at CongresoInternacional de Inteligencia Computacional (CIIC 2007). Bogotá. 5-7. September 2007.
Vélez J., Fabregat R., Gonzalez G., Arteaga C. "Servicios Ofrecidos en Entornos deAprendizaje Virtual a partir de un Modelo de Usuario Integral", Accepted at SimposioNacional de Tecnologías de la Información y las Comunicaciones en la Educación(SINTICE 2007), Zaragoza (España). 11-14. September 2007.
Vélez J., Fabregat R. "SMAW: Sistema Multiagente para la Adaptación de contenidoWeb", Published at Reunión Nacional de Facultades de Ingeniería. Cartagena deIndias (Colombia). October 2007.
Wong K. Y., Thyvetil M. A., Machaira A., Loscos C.. “Density distribution and localbehaviour for realistic crowd simulation”. IADIS International Computer Graphics andVisualization, Lisbon, Portugal, July 2007.
Zambrano Darine, García-Gabín Winston, Camacho Eduardo F. “A Heuristic Predictivelogic Controller applied to hybrid solar air conditioning plant”. Lecture Notes inComputer Science, Apr 2007.
Zapateiro M, Luo N. “Experimental Identification of a shear-mode MR damper andnumerical evaluation of hysterectic models.” 21st Biennal Conference on MechanicalVision and Noise. Sep 2007, Las Vegas, Nevada (USA).
Zapateiro M, Luo N, Dyke SJ, Taylor E. “Modeling and identification of a class of MRfluid foam damper.” III ECCOMAS Thematic Conference on Smart Structures andMaterials. Jul 2007, Gdansk (Poland).
Zapateiro M, Taylor E, Dyke SK, Luo N. “Modeling and identification of hystereticdynamics of a MR actuator for its application to semiactive control of flexible structures.”SPIE Symposium on Smart Structures and Materials & Nondestructive Evaluation andHealth Monitoring. Mar 2007, San Diego (USA).
Zapateiro M, Luo N. “MR dampers for seismic protection: design, modeling andidentification.” 3r Congreso Nacional de Ingeniería Sísmica. May 2007, Girona.
Zapateiro M, Luo N. “Neural network modeling of a magnetorheological damper.”Congrés Internacional de l’Associació d’Intel.ligència Artificial (International Congressof the Association of Artificial Intelligence). Oct 2007, Sant Julià de Lòria (Andorra).
Zapateiro M, Luo N. “Parametric and non-parametric characterization of the dynamicsof a shear-mode magnetorheological damper.” 3rd International Conference onMechatronic Systems and Material. Sep 2007, Kaunas (Lithuania).
41
40
Ferrer Jordi, Gracias Nuno, Delaunoy Olivier and Garcia Rafael. “Creating Large andAccurate Mosaics of the Mid-Atlantic Ridge”. International Workshop on MarineTechnology Vilanova i la Geltrú, Spain (Vilanova i la Geltrú).
Flórez J., Sbert Mateu, Sainz M. A., Vehí Josep. “Guaranteed Adaptive Antialiasingusing Interval”. Arithmetic Lectures Notes in Computer Science, International Conferenceon Computational Science - Sixth International Workshop on Computer Graphics andGeometric Modeling, Beijing (China), May 27, 2007.
Fort M., Sellarès J.A.. “Generalized Higher-Order Voronoi Diagrams on PolyhedralSurfaces“. Proc. 4th International Symposium on Voronoi Diagrams in Science andEngineering, IEEE Computer Society, Wales, UK, pp 74-83, 2007.
Freixenet Jordi, Marzo Jose L, Soler Josep. "Experiencias en un plan piloto deadaptación al EEES: Hoja de ruta para coordinadores", Published at Actas de las XIIIJornadas de Enseñanza Universitaria de la Informática (JENUI 2007), pp 57-64.Teruel. July 2007.
Freixenet Jordi, Oliver Arnau, Lladó Xavier, Martí Robert and Martí Joan. “MassEigendetection and the Benefits of Introducing Breast Density Information”. InternationalJournal of Computer Assisted Radiology and Surgery, Germany (Berlin).
Freixenet Jordi, Marzo Jose L, Soler Josep. “Experiencias en un plan piloto deadaptación al EEES: Hoja de ruta para coordinadores”. Actas de las XIII Jornadas deEnseñanza Universitaria de la Informática (JENUI 2007), Spain (Teruel).
García-Gabín W, Dorado F, Bordons C. “Comparative analysis of sliding mode andVolterra model predictive controllers applied to a benchmark CSTR non-minimumphase reactor.” European Control Conference (ECC’07). Jul 2007, Kos (Greece).
García-Jaramillo M, Ruiz M, Colomer J, Meléndez J. “Multiway Principal ComponentAnalysis and Case Base Reasoning methodology for abnormal situation detection ina Nutrient Removing SBR.” European Control Conference (ECC’07). Jul 2007, Kos(Greece).
García Guillem de Marina, Ribas David and Ridao Pere. “A global localization systemfor structured environments using an imaging sonar”. IFAC Conference on Controlin Marine Systems, Croacia (Bol).
Garcia I., Patow G., Sbert M., and Szirmay-Kalos L. “Multi-layered indirect texturingfor tree rendering“. Eurographics Workshop on Natural Phenomena 2007, D. Ebert,S. Mérillou (Eds).
García Oscar, Vehí Josep, Campos e Matos Jose, Abel Hernández António & CasasJoan Ramon. “Structural Assessment Under Uncertain Parameters Via IntervalAnalysis”. Journal of Computational and Applied Mathematics (Article in Press), FiniteElement Methods in Engineering and Science (FEMTEC 2006), 2007.
Gelso E, Castillo SM, Armengol J. “Robust fault detection using consistency techniquesfor uncertainty handling.” IEEE International Symposium on Intelligent Signal Processing(WISP'07). Oct 2007, Alcalá de Henares, Madrid (Spain).
Gelso ER, Castillo SM, Armengol J. “Construyendo una Plataforma para Deteccióny Diagnosis de Sistemas Dinámicos Basada en Análisis Intervalar Modal y RedundanciaAnalítica.” IX Jornadas de Automatización del Razonamiento Cualitativo y Aplicaciones(JARCA 07). Jun 2007, Lloret de Mar.
González Francisco, Feixas Miquel and Sbert Mateu. “View-based Shape Similarityusing Mutual Information Spheres”. Eurographics'07 Short Paper, Prague, CzechRepublic, September, 3-7, 2007.
González Francisco, Sbert Mateu and Feixas Miquel. “An Information-Theoretic AmbientOcclusion”. International Symposium on Computational Aesthetics in Graphics,Visualization, and Imaging. Banff (Canada), 2007.
González Gustavo, de la Rosa Josep Lluís, Montaner Miquel, Delfín Sonia, EmbeddingEmotional Context in Recommender Systems, IEEE 3rd International Workshop onWeb Personalisation Recommender Systems and Intelligent User Interfaces (WPRSIUI'07),Istambul, Turkey, April 16-20, 2007.
Harle D., Albarrak S., Urra A., Calle E., Marzo J. L.. "Service Level AgreementFramework for Differentiated Survivability in GMPLS-based IP-over-Optical Networks",Published at IEEE International Conference on Communications (ICC) proceedings,ISBN 1-4244-0353-7, Glasgow (UK). June 2007.
Herrero P, Palerm C, Dassau E, Zisser H, Jovanovic L A. “Glucose Absortion ModelLibrary of Mixed Meals for in silico Evaluation of Artificial Beta Cell Control Algorithms.”Diabetes Technology Meeting. Sep 2007, San Francisco (USA).
Ibarra S., Quintero C., Ramón J. A., de la Rosa J. Ll., Castán J. A., PAULA: Multi-agent Architecture for Coordination of Intelligent Agent Systems, The European ControlConference, ECC’07, Conference, Julio 2-5, 2007, Kos, Greece.
Jia Horgan Jonathan, Toal Daniel, Ridao Pere and Garcia Rafael. “Real-time visionbased AUV navigation system using a complementary sensor suite”. IFAC Conf. onControl Applications in Marine Systems (CAMS'07), Croatia (Bol).
Khosravi A, Armengol J, Gelso E. “An Interval Intelligent-based Approach for FaultDetection and Modelling.” IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Jul 2007, London (England).
Khosravi A, Armengol J. “A Hybrid Method for Fault Detection and Modeling usingModal Intervals and ANFIS.” American Control Conference (ACC’07). Jul 2007, NewYork City (USA).
Kudzinava Marina, Garcia Rafael and Martí Joan. “Feature-based Matching of UnderwaterImages”. International Workshop on Marine Technology Vilanova i la Geltrú, Spain(Vilanova i la Geltrú).
Luo N, Rodellar J, Ikhourane F, Zapateiro M. “Modelling, identification and control of
mechatronic systems equipped with smart actuators.” World Forum on Smart Materialand Structures Technology. May 2007, Chongqing and Naijing (China).
L., Luo N., Yuan J.Q. “A model based estimation of the profit function for the continuousfermentation of baker's yeast“. Chemical Engineering and Processing, Nov 2007,1215 – 1222
Luo N, Villamizar R, Vehí J. “Backstepping Control of Nonlinear Building Structureswith Hysteretic and Frictional Dynamics.” European Control Conference (ECC’07). Jul2007, Kos (Greece).
Lladó Xavier, Oliver Arnau, Martí Joan and Freixenet Jordi. "Dealing with false positivereduction in mammographic mass detection”. Medical Image Understanding andAnalysis (MIUA), United Kingdom (Aberystwyth).
Martí Robert, Martí Joan, Freixenet Jordi, Vilanova Joan Carles and Barceló Joaquim.“Robust Speckle Detection in Ultrasound Images. Evaluation Aspects”. SPIE QualityControl by Artificial Vision, France (Le Creusot).
Martí Robert, Oliver Arnau, Raba David and Freixenet Jordi. ”Breast skin-line segmentationusing contour growing”. Iberian Conference on Pattern Recognition and Image Analysis,Spain (Girona).
Marzo J L., Caro L F., Solano F, de Oliveira J., Fabregat R. "Operational Cost Reductionin WDM Networks using Lighttours (invited)", Published at International Conferenceon Transparent Optical Networks (ICTON) proceedings. ISBN 1-4244-1249-8. IEEEcatalog # 07EX1796C. July 2007.
Mérida D., Baldiris S., Fabregat R., Velez J., Huerva D. "A User Model that incorporatescharacteristics of Access Devices in MAS-SHAAD", Published at UM'07- WorkshopTowards User Modelling and Adaptive Systems for All (TUMAS-A). 24. June 2007.
Moeller Briggite, Garcia Rafael and Posch Stefan. “Towards Objective Quality Assessmentof Image Registration Results”. International Conference on Computer Vision Theoryand Applications, Spain (Barcelona).
Molinier Thierry, Fofi David, Gorria Patrick and Salvi Joaquim. “Detection of Surfacesfor Projection texture”. IEEE/SPIE 8th International Conference on Quality Control byArtificial Vision, France (Le Creusot).
Molinier Thierry, Fofi David, Gorria Patrick and Salvi Joaquim. “Projection de Texturesur des Objects 3D Réels“. GRETSI’2007, Colloque du Groupe de Recherche sur leTraitement du Signal et des Images, France (Troyes).
Molinier Thierry, Fofi David, Gorria Patrick and Salvi Joaquim. “Automatic texturemapping on real 3D model”. IEEE Int. Workshop on Projector-Camera Systems,PROCAMS 2007, in conjunction with Computer Vision and Pattern RecognitionWorkshop, USA (Minnesota).
Mujica Luis Eduardo, Vehí Josep and Rodellar José. “A Case Based Reasoningapproach for Damage Assessment in Smart Structures”. III ECCOMAS ThematicConference on Smart Structures and Materials. Jul. 2007, Gdansk (Poland).
Muntaner Perich Eduard, de la Rosa Josep Lluís, Towards a Formalisation of DynamicElectronic Institutions, The AAMAS'07 Workshop on Coordination, Organization,Institutions and Norms in agent systems (COIN'07), May 14-18, 2007, Hawaii, the USA.
Nicosevici Tudor, Garcia Rafael, Negahdaripour Shahriar, Kudzinava Marina and FerrerJordi. “Identification of Suitable Interest Points Using Geometric Photometric Cuesin Motion Video for Efficient 3-D Environmental Modeling”. IEEE International Conferenceon Robotics and Automation (ICRA), Italy (Rome).
Nicosevici Tudor, Garcia Rafael and Gracias Nuno. “Identification of geometricallyconsistent interest points for 3D scene reconstruction”. International Workshop onMarine Technology Vilanova i la Geltrú, Spain (Vilanova i la Geltrú).
Oliver Arnau, Lladó Xavier, Freixenet Jordi and Martí Joan. ”A False Positive Reductionin Mammographic Mass Detection using Local Binary Patterns”. International Conferenceon Medical Image Computing and Computer Assisted Intervention (MICCAI), Austrialia(Brisbane).
Oliver Arnau, Lladó Xavier, Martí Robert, Freixenet Jordi and Zwiggelaar Reyer.“Classifying Mammograms using Texture Information”. In Medical Image Understandingand Analysis, Wales (Aberystwyth).
Oliver Arnau, Lladó Xaxier, Martí Joan, Martí Robert and Freixenet Jordi. “False PositiveReduction in Breast Mass Detection using Two-Dimensional PCA”. Iberian Conferenceon Pattern Recognition and Image Analysis, Spain (Girona).
Oliveros A, Vehí J, Gutiérrez A, García-Gabín W. “Closed Loop Glycemic Control ForCritically Ill Patients: Feasibility Study and Experimental Design.” 4th IEEE InternationalSummer School and Symposium on Medical Devices and Biosensors. Aug 2007,Cambridge (England).
Oliveros A, Vehí J, Gutiérrez A, García-Gabín W. “Closed Loop Glycemic Control forCritically Ill Patients: Feasibility Study and Experimental Design.” ASME 2007 SummerBioengineering Conference. Jun 2007, Keystone, Colorado (USA).
Oliveros A, Vehí J, Gutiérrez A, García-Gabín W. “Control en Lazo Cerrado para Nivelde Glucosa en Pacientes Críticos: Estudio Previo y Propuesta de Protocolo en EnsayosCríticos.” XXVIII Jornadas de Automática. Sep 2007, Huelva.
Pacheco Ll., Luo N. “Mobile robot local predictive control using a visual perceptionhorizon”. Emerging Technologies, Robotics and Control Systems 2007, 217 - 225.
Pacheco Ll., Luo N. “Trajectory planning with control horizon based on narrow localoccupancy grid perception”. Lecture Notes on Control and Information Sciences, 2007.
Pacheco LLuis and Luo N. “Predictive control by local visual data”. 4th InternationalConference on Informatics in Control, Automation and Robotics (ICINCO 2007). May2007, Angers (France).
Pacheco LLuis and Luo N. “Trajectory planning with control horizon based on narrowlocal occupancy grid perception”. 6th International Workshop on Robot Motion andControl. Jun 2007, Bukowy Sworek (Poland).
Palomeras Narcís, Ridao Pere, Carreras Marc. “Defining a Mission Control Language”.Congrés Internacional sobre Tecnologia Marina, 2007, Spain (Vilanova i la Geltrú).
Palomeras Narcís, Ridao Pere, Carreras Marc, Batlle Joan. “A Mission Control Languagefor AUVs”. Control Applications in Marine Systems, 2007, Italy.
Peracaula Marta, Freixenet Jordi, Martí Joan, Martí Josep and Paredes Josep Maria.“Faint compact object detection in wide field interferometric radio images using ahybrid method based on local thresholding and wavelet decomposition”. AstronomicalData Analysis Software and Systems XVII, ASP, United Kingdom (London).
Peracaula Marta, Freixenet Jordi, Martí Joan, Martí Robert and Paredes Josep Maria.“Faint compact object detection in wide field interferometric radio images using ahybrid method based on local thresholding and wavelet decomposition”. AstronomicalData Analysis Software and Systems XVII, United Kingdom (London).
Prados Ricard, Neumann Lazlo, Cufí Xavi and Garcia Rafael. “Visually PleasantBlending Techniques in Underwater Mosaicing”. International Workshop on MarineTechnology Vilanova i la Geltrú, Spain (Vilanova i la Geltrú).
Puiggali Joan, Jové Teo, Segovia Juan, Marzo Josep Lluís. "Master/Slave SpeculativeParallelization Architecture for Computer Clusters", Published at 2007 ACS/IEEEInternational Conference on Computer Systems and Applications (AICCSA ‘2007).May 2007.
Quintero M. Christian G., Ibarra M.Salvador, De la Rosa Josep Ll. and Vehí Jose.Introspection on Control-grounded Capabilities. A Task Allocation Case Study in RobotSoccer. International Conference on Informatics in Control, Automation and Robotics(ICINCO 2007) May 2007, Angers (France).
Quintero M.Christian G., Busquets Dídac, de la Rosa Josep Ll. and Vehí Josep,Introspection on Control-grounded Capabilities. Relevance in Task Allocation Problem.The European Control Conference ECC’07, Jul 2007, Kos, Greece.
Raba David, Peracaula Marta, Martí Robert and Marti Joan. “On the detection ofregions-of-interest in dynamic contrast-enhanced MRI”. 3rd Iberian Conference onPattern Recognition and Image Analysis (IbPRIA'07), Spain (Girona).
Ribas David, Palomeras Narcís, Ridao Pere, Carreras Marc and Hernandez Emili.“ICTINEU AUV wins the first sauc-e competition”. IEEE International Conference onRobotics and Automation, Italia (Roma).
Ribas David, Ridao Pere, Neira José and Tardós Juan Domingo. “A method for extractinglines and their uncertainty from acoustic underwater images”. 6th IFAC Symposiumon Intelligent Autonomous Vehicles, France (Toulouse)
Ribas David, Ridao Pere, Tardós Juan Domingo and Neira José. “Underwater SLAMin a marina environment”. IEEE/RSJ International Conference on Intelligent Robotsand Systems, EUA (San Diego).
Ribas David, Ridao Pere, Neira José and Tardós Juan Domingo. “Underwater SLAMfor manmade environments”. Workshop internacional sobre tecnología marina,MARTECH 07, Spain (Vilanova i la Geltrù).
Ribas David, Ridao Pere, Neira José, Tardos and Domingo Joan. “Line extraction frommechanically scanned imaging sonar”. 3rd Iberian Conference on Pattern Recognitionand Image Analysis, Spain (Girona).
Ridao Pere, Carreras Marc, Hernandez Emili and Palomeras Narcís. “UnderwaterTelerobotics for Collaborative Research”. Advances in Tele-robotics.
Rigau Jaume, Feixas Miquel, Sbert Mateu. ”Conceptualizing Birkhoff's AestheticMeasure Using Shannon Entropy and Kolmogorov Complexity”, ComputationalAesthetics 2007: 105-112.
Rodellar J, Vehí J, Mujica LE. “Experimental Applications of a Case Based ReasoningMethod for Structural Damage Assessment.” World Forum on Smart Material andStructures Technology. May 2007, Chongqing and Naijing (China).
Ruiz Ordóñez Ronald Uriel, de la Rosa Josep Lluís, Guzmán Obando Javier, StrategyRecommender Agents (ALEX) - the Methodology, Sixth International Joint Conferenceon Autonomous Agents and Multiagent Systems (AAMAS'07), May 14-18, 2007,Hawaii, the USA.
Santos Olga C., Baldiris Silvia, Velez Jeimy, Boticario Jesús G., Fabregat Ramón."Dynamic Support in ADAPTAPlan: ADA+", Published at Conferencia de la AsociaciónEspañola para la Inteligencia Artificial (CAEPIA). Salamanca. 12-16. November 2007.
Sbert Mateu, Feixas Miquel, Rigau Jaume, Chover Miguel, Viola Ivan. “Applicationsof Information Theory to Computer Graphics”, Eurographics Tutorial, 2007.
Solano F., Van Caenegem R., Colle D., Marzo J., Fabregat R.. "Label Merging in All-Optical Label Swapping Networks", Published at VI Workshop in G/MPLS networks.April 2007.
Solano F, Van Caenegem R, Colle D, Pickavet M, Marzo J L, Fabregat R (Invited)."Routing and Label Stacking in All-Optical Label", Published at Networks and OpticalCommunications (NOC) proceedings, ISBN: 978-91-633-0869-7. Stockholm. June 2007.
Soler Josep, Boada Imma, Prados Ferran, Poch Jordi, Fabregat Ramon. "An AutomaticCorrection Tool for Relational Algebra Queries", Accepted at International Conference onComputational Science and Its Applications (ICCSA 2007). Malaysia, 26-29 August 2007.
Suárez B.Silvia A., Quintero M.Christian G., de la Rosa Josep Lluis, Improving TasksAllocation and Coordination in a Rescue Scenario, The European Control ConferenceECC’07, Conference, Julio 2-5, 2007, Kos, Greece.
Urra Anna, Calle Eusebi, Marzo Jose L., Vila Pere. "Incorporating Protection Mechanismsin the Dynamic Multi-Layer Routing Schemes", Published at Ad Hoc and SensorNetworks, Wireless Networks, Next Generation Internet, NETWORKING 2007, Atlanta,GA, US. Lecture Notes in Computer Science. 4479, pp. 786-796. May 2007.
Vélez Jeimy, Fabregat Ramon, González Gustavo. "Entornos de Aprendizaje VirtualAdaptativos soportados por Máquinas de Soporte Vectorial", Accepted at CongresoInternacional de Inteligencia Computacional (CIIC 2007). Bogotá. 5-7. September 2007.
Vélez J., Fabregat R., Gonzalez G., Arteaga C. "Servicios Ofrecidos en Entornos deAprendizaje Virtual a partir de un Modelo de Usuario Integral", Accepted at SimposioNacional de Tecnologías de la Información y las Comunicaciones en la Educación(SINTICE 2007), Zaragoza (España). 11-14. September 2007.
Vélez J., Fabregat R. "SMAW: Sistema Multiagente para la Adaptación de contenidoWeb", Published at Reunión Nacional de Facultades de Ingeniería. Cartagena deIndias (Colombia). October 2007.
Wong K. Y., Thyvetil M. A., Machaira A., Loscos C.. “Density distribution and localbehaviour for realistic crowd simulation”. IADIS International Computer Graphics andVisualization, Lisbon, Portugal, July 2007.
Zambrano Darine, García-Gabín Winston, Camacho Eduardo F. “A Heuristic Predictivelogic Controller applied to hybrid solar air conditioning plant”. Lecture Notes inComputer Science, Apr 2007.
Zapateiro M, Luo N. “Experimental Identification of a shear-mode MR damper andnumerical evaluation of hysterectic models.” 21st Biennal Conference on MechanicalVision and Noise. Sep 2007, Las Vegas, Nevada (USA).
Zapateiro M, Luo N, Dyke SJ, Taylor E. “Modeling and identification of a class of MRfluid foam damper.” III ECCOMAS Thematic Conference on Smart Structures andMaterials. Jul 2007, Gdansk (Poland).
Zapateiro M, Taylor E, Dyke SK, Luo N. “Modeling and identification of hystereticdynamics of a MR actuator for its application to semiactive control of flexible structures.”SPIE Symposium on Smart Structures and Materials & Nondestructive Evaluation andHealth Monitoring. Mar 2007, San Diego (USA).
Zapateiro M, Luo N. “MR dampers for seismic protection: design, modeling andidentification.” 3r Congreso Nacional de Ingeniería Sísmica. May 2007, Girona.
Zapateiro M, Luo N. “Neural network modeling of a magnetorheological damper.”Congrés Internacional de l’Associació d’Intel.ligència Artificial (International Congressof the Association of Artificial Intelligence). Oct 2007, Sant Julià de Lòria (Andorra).
Zapateiro M, Luo N. “Parametric and non-parametric characterization of the dynamicsof a shear-mode magnetorheological damper.” 3rd International Conference onMechatronic Systems and Material. Sep 2007, Kaunas (Lithuania).
41

®
iiia.udg.edu

®
iiia.udg.edu

Campus de Montilivi, Edifici P417071 Girona (SPAIN)Tel. 972 418 495Fax 972 418 [email protected]
iiia.udg.edu
®
‘07
®
iiia.udg.edu
IIiARESEARCHREPORT
Related Documents











