Research Article Second Order Sliding Mode Control of the Coupled Tanks System Fayiz Abu Khadra 1 and Jaber Abu Qudeiri 2 1 Faculty of Engineering, King Abdulaziz University, Rabigh 21911, Saudi Arabia 2 FARCAMT, Advanced Manufacturing Institute, King Saud University, Riyadh 11421, Saudi Arabia Correspondence should be addressed to Jaber Abu Qudeiri; [email protected] Received 7 March 2015; Revised 4 April 2015; Accepted 5 April 2015 Academic Editor: Qingling Zhang Copyright © 2015 F. Abu Khadra and J. Abu Qudeiri. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Four classes of second order sliding mode controllers (2-SMC) have been successfully applied to regulate the liquid level in the second tank of a coupled tanks system. e robustness of these classes of 2-SMC is investigated and their performances are compared with a first order controller to show the merits of these controllers. e effectiveness of these controllers is verified through computer simulations. Comparison between the controllers is based on the time domain performance measures such as rise time, settling time, and the integral absolute error. Results showed that controllers are able to regulate the liquid level with small differences in their performance. 1. Introduction e control of liquid level in multiple connected tanks by controlling the liquid flow is a typical nonlinear control prob- lem in the field of process control. It is present in many industrial processes. Many researchers around the world have attempted the design and implementation of controllers for the liquid level of a coupled tanks system. Some of the controllers used to control coupled tanks systems include Proportional-Integral-Derivative (PID) type controllers [1], a parallel structure of fuzzy PID control systems [2], a non- linear constrained predictive algorithms based on feedback linearization control [3], and fractional PID controller [4]. Sliding mode control is an efficient method for robust control of uncertain systems [5–7]. e basic idea of the first order sliding mode control (1-SMC) is to let the system converge towards a selected surface and then to stay there in spite of uncertainties and disturbances. e 1-SMC method can be designed by performing two steps. e first step is to select an appropriate sliding surface to constrain the state trajectory on it. e second step includes designing of a discontinuous control law to force the system state to reach the designed surface preferably in finite time. 1-SMC requires sliding variable relative degree (the relative degree is defined as the order of the derivative of the controlled variable, in which the control input appears explicitly) to be equal to one with respect to the control input which limits the choice of the sliding variable. e 1-SMC is also used to regulate the liquid level. An input-dependent sliding surface has been used in [8] to regulate the liquid level in a coupled tanks system. A sliding mode controller, which has a state varying sliding surface parameter, has been designed in [9]. A neuro-fuzzy- sliding mode controller using nonlinear sliding surface has been proposed in [10]. In addition to the restriction regarding the relative degree, 1-SMC also has the drawback of chattering due to high switching frequency of the control. e drawbacks of 1- SMC can be successfully eliminated by the use of higher order sliding mode controllers (HOSMC). HOSMC force the sliding variable and its successive derivatives to zero. ere is no restriction on the relative degrees. As the high frequency control switching is pushed in the higher derivative of the sliding variable, chattering is significantly reduced. Another feature of HOSMC is that the detailed mathematical model of the plant is not required. e most widely used HOSMC are second order sliding mode controllers (2-SMC). Examples of Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2015, Article ID 167852, 9 pages http://dx.doi.org/10.1155/2015/167852

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Research ArticleSecond Order Sliding Mode Control ofthe Coupled Tanks System
Fayiz Abu Khadra1 and Jaber Abu Qudeiri2
1Faculty of Engineering King Abdulaziz University Rabigh 21911 Saudi Arabia2FARCAMT Advanced Manufacturing Institute King Saud University Riyadh 11421 Saudi Arabia
Correspondence should be addressed to Jaber Abu Qudeiri jqudeiriksuedusa
Received 7 March 2015 Revised 4 April 2015 Accepted 5 April 2015
Academic Editor Qingling Zhang
Copyright copy 2015 F Abu Khadra and J Abu Qudeiri This is an open access article distributed under the Creative CommonsAttribution License which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
Four classes of second order sliding mode controllers (2-SMC) have been successfully applied to regulate the liquid level in thesecond tank of a coupled tanks systemThe robustness of these classes of 2-SMC is investigated and their performances are comparedwith a first order controller to show themerits of these controllersThe effectiveness of these controllers is verified through computersimulations Comparison between the controllers is based on the time domain performance measures such as rise time settlingtime and the integral absolute error Results showed that controllers are able to regulate the liquid level with small differences intheir performance
1 Introduction
The control of liquid level in multiple connected tanks bycontrolling the liquid flow is a typical nonlinear control prob-lem in the field of process control It is present in manyindustrial processesMany researchers around theworld haveattempted the design and implementation of controllers forthe liquid level of a coupled tanks system Some of thecontrollers used to control coupled tanks systems includeProportional-Integral-Derivative (PID) type controllers [1]a parallel structure of fuzzy PID control systems [2] a non-linear constrained predictive algorithms based on feedbacklinearization control [3] and fractional PID controller [4]
Sliding mode control is an efficient method for robustcontrol of uncertain systems [5ndash7] The basic idea of thefirst order sliding mode control (1-SMC) is to let the systemconverge towards a selected surface and then to stay there inspite of uncertainties and disturbances The 1-SMC methodcan be designed by performing two steps The first step isto select an appropriate sliding surface to constrain the statetrajectory on it The second step includes designing of adiscontinuous control law to force the system state to reachthe designed surface preferably in finite time 1-SMC requires
sliding variable relative degree (the relative degree is definedas the order of the derivative of the controlled variable inwhich the control input appears explicitly) to be equal to onewith respect to the control inputwhich limits the choice of thesliding variable The 1-SMC is also used to regulate the liquidlevel An input-dependent sliding surface has been used in[8] to regulate the liquid level in a coupled tanks systemA sliding mode controller which has a state varying slidingsurface parameter has been designed in [9] A neuro-fuzzy-sliding mode controller using nonlinear sliding surface hasbeen proposed in [10]
In addition to the restriction regarding the relative degree1-SMC also has the drawback of chattering due to highswitching frequency of the control The drawbacks of 1-SMC can be successfully eliminated by the use of higherorder sliding mode controllers (HOSMC) HOSMC force thesliding variable and its successive derivatives to zeroThere isno restriction on the relative degrees As the high frequencycontrol switching is pushed in the higher derivative of thesliding variable chattering is significantly reduced Anotherfeature of HOSMC is that the detailedmathematical model ofthe plant is not required The most widely used HOSMC aresecond order sliding mode controllers (2-SMC) Examples of
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 167852 9 pageshttpdxdoiorg1011552015167852
2 Mathematical Problems in Engineering
2-SMC are widely used twisting controllers and its modifiedvariant the super twisting controllers the quasi-continuouscontrollers the suboptimal control algorithm and the controlalgorithm with prescribed convergence law
Khan and Spurgeon [11] applied a second order slidingmode control idea to control a coupled tank system
The super twisting and adaptive super twisting controlalgorithms are developed for the two-spacecraft formationflying system in [12] A 2-SMC is proposed for secondorder uncertain plants using equivalent control approachto improve the performance of control systems in [13] Adiscrete integral sliding mode controller based on compositenonlinear feedback method to improve the transient perfor-mance of uncertain systems is proposed in [14] A secondorder sliding mode controller using nonlinear sliding surfaceto guarantee stability as well as to enhance the transientperformance of uncertain linear systems with parametricuncertainty has been proposed in [15] An adaptive secondorder slidingmode controller with a nonlinear sliding surfacethat consists of a gain matrix having a variable damping ratiohas been presented in [16] A higher order sliding modecontrol algorithm is described for a class of uncertain multi-input multioutput nonlinear systems and the developedalgorithm was applied on a hovercraft vessel control [17]
Despite the many existing publications related to the 2-SMC there is a lack of articles that compare performance ofdifferent types of 2-SMC in water level of the second tank inthe coupled tanks system from one side and between themand the first order controller from the other side Moreoverto the best of authorsrsquo knowledge there is no publishedwork concerning the 2-SMC especially which contains thedetailed analysis of the time domain controlmeasures and thetracking performance of the well-known controller
In this paper robustness of four classes of 2-SMCnamely twisting (TA) the super twisting (STC) prescribedconvergence law controller (PCL) and the quasi-continuouscontroller (QCC) to regulate the water level of the secondtank in the coupled tanks system is introduced and theirperformances are compared Moreover the performances ofthe four controllers mentioned above are compared with afirst order controller to show the merits of these controllers
The remaining structure of this paper is as follows In thenext section the dynamic model of the coupled tank systemwill be explained Section 3 briefly provides the basics of the1-SMC controller and the 2-SMC In Section 4 2-SMCwill bedescribed briefly In Section 5 the simulation results from theapplication of the controller will be presented and discussedFinally Section 6 includes the concluding remarks based onthe results obtained
2 Mathematical Modeling ofthe Coupled Tanks System
Figure 1 shows a schematic diagram of the two-coupled tankssystem The tanks system consists of two connected tanks Apump supplies the water into the first tank The second tankis filled from the first tank via a connecting pipe An outlet islocated at the bottom of the second tank to change the output
q
q1q2
h1h2
Figure 1 A schematic diagram of the two-coupled tanks system
flow 1199022Themathematical model of the coupled tanks system
is nonlinear and can be derived as followsApplying the flow balance equation for Tanks 1 and 2
119889ℎ1
119889119905=1
119860(119902 minus 119902
1)
119889ℎ2
119889119905=1
119860(1199021minus 1199022)
(1)
In (1) 1199021and 1199022are defined as
1199021= 1198861radic2119892 (ℎ
1minus ℎ2) for ℎ
1gt ℎ2
1199022= 1198862radic2119892ℎ
2for ℎ2gt 0
(2)
where ℎ1and ℎ
2are the water level in Tank 1 and Tank 2
respectively 119902 is the inlet flow rate 1199021is the flow rate from
Tank 1 to Tank 2119860 is the cross section area for both tanks 1198861
is the area of pipe connecting the two tanks 1198862is the area of
the outlet and 119892 is the constant of gravity If the inlet flow 119902 isselected as input and the liquid level ℎ
2in the second tank as
output the system can be considered as a single input singleoutput system (SISO) The two tanks system can be modeledby the following two differential equations
119889ℎ1
119889119905= minus1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 +119902
119860 (3)
119889ℎ2
119889119905= 1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 minus 1198962radicℎ2 (4)
The parameters 1198961and 1198962are defined by
1198961=1198861radic2119892
119860
1198962=1198862radic2119892
119860
(5)
Note that 119902 is always positive whichmeans that the pumpcan pump water into the tank (119902 ge 0) At equilibrium forconstant water level set point the derivatives of the waterlevels with respect to time in the two tanks must be zero sothat the following condition can be written
119889ℎ1
119889119905=119889ℎ2
119889119905= 0 (6)
Mathematical Problems in Engineering 3
Therefore using (6) in (3) and (4) the following algebraicrelationships hold
minus1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 +119902
119860
1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 minus 1198962radicℎ2
(7)
The equilibrium flow rate 119902 can be calculated as
119902 = minus1198601198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816(8)
To satisfy the constraint on the input flow rate the term1198961sign(ℎ
1minus ℎ2) ge 0 which implies ℎ
1ge ℎ2 Then the
dynamics model can be written as
119889ℎ1
119889119905= minus1198961radicℎ1minus ℎ2+ 1198962radicℎ2
119889ℎ2
119889119905= minus1198961radicℎ1minus ℎ2minus 21198962radicℎ2+1
119860119906
(9)
Using the following transformation
1199091= ℎ1
1199092= minus1198961radicℎ1+ 1198962radicℎ1minus ℎ2
(10)
(9) can be written as
1= 1199092
2= 119891 (119909 119905) + 119887 (119909 119905) 119906
119910 = 1199091
(11)
It can be easily checked that119891(119909 119905) and 119887(119909 119905) in (11) havethe following form
119891 (119909 119905) =11989611198962
2(
radicℎ2
radicℎ1minus ℎ2
minusradicℎ1minus ℎ2
radicℎ2
) +1198962
1
2minus 1198962
2 (12)
119887 (119909 119905) =1198962
2119860
1
radicℎ1minus ℎ2
(13)
3 Sliding Mode Control
31 1-SMC Thedynamics of a second order nonlinear systemcan be written as
= 119891 (119909) + 119887 (119909) 119906 (14)
where 119909(119905) is the state and 119906(119905) is the control input vectorsrespectively 119891(119909 119905) and 119887(119909 119905) are unknown nonlinear func-tions of time and states The functions 119891(119909) and 119887(119909) arenot exactly known with upper bounded uncertainties Thecontrol problem let the state 119909 track a specified time-varyingstate 119909
119889 The required sliding surface to control this system
can be defined as
119878 = 119890 + 120582119890 (15)
119890 = 119909 minus 119909119903is an error vector and 120582 is a constant parameter
which dictated the slope of the sliding surface Differentiating(16) and inserting (15) and then putting 119878 = 0 and solving for119906 result in the following control law
= minus119891 ( 119909) + 119889+ 120582 119909 (16)
and define the control law
119906 = minus 119896 sign (119904) (17)
where 120582 and 119896 are strictly positive constant 119896 can be selectedhigh to cope with uncertainty A sufficient condition for theconvergence to a sliding mode is
1
2
119889
11988911990521199042le minus120578 |119904| (18)
120578 is a positive constant Equation (18) is called reaching orsliding condition The signum function in (17) is defined as
sign (119909) =
minus1 119909 lt 0
0 119909 = 0
1 119909 gt 0
(19)
Commonly in 1-SMC to avoid chattering the signumfunction is replaced by a smooth function to create a bound-ary layer around the sliding surface For example a saturationfunction can be used and is given by
sat (120590) =
sign (120590) if |120590| gt 120593120590
120593if |120590| le 120593
(20)
In (22) 120593 is a positive constant which defines the thickness ofthe boundary layer
32 2-SMC 2-SMC control is a subset of HOSMC It differsfrom the 1-SMC by including the first order derivative of thesliding variable while maintaining the same robustness andperformance as that of the 1-SMC 120590 isin R in an output of(15) to be exactly stabilized in finite time at 120590 = 0 119906 isin R
is the control input and 119909 isin R119899 is the state If the output 120590has a fixed and known relative degree 119903 isin R119899 then for thepositive constants 119870
119898 119870119872 and 119862 the following inequalities
hold globally
0 lt 119870119898le 119887 le 119870
119872
10038161003816100381610038161198911003816100381610038161003816 le 119862
(21)
2-SMCmay be considered as controllers for the followingdifferential inclusion [18]
isin [minus119862 119862] + [119870119898 119870119872] 119906 (22)
2-SM controllers allow solving the problem of finite-timestabilization of a black box system as shown in Figure 2 Theonly information needed from the system is the output
4 Mathematical Problems in Engineering
r(t)
+minus
120590(t)
Diff
HOSMCu(t)
System
y(t)
Figure 2 Block diagram of a black box controller
The required derivative can be obtained by usingHOSMCarbitrary order differentiator [19]The real time differentiatorhas the general form as in the following set of equations In(24) 119891(119905) represents signal to be differentiated 119896 minus 1 timesConsider
0= V0
1= V1V0
= minus1205821198961198711(119896+1) 10038161003816100381610038161199110 minus 119891 (119905)
1003816100381610038161003816119896(119896+1) sign (119911
0minus 119891 (119905))
+ 1199111
V1= minus120582119896minus11198711119896 10038161003816100381610038161199111 minus V0
1003816100381610038161003816(119896minus1)119896 sign (119911
1minus V0) + 1199112
119896minus1= V119896minus1
= minus120582111987112 1003816100381610038161003816119911119896minus1 minus V119896minus2
1003816100381610038161003816119896(119896+1) sign (119911
119896minus1minus V119896minus2)
+ 119911119896
119896= 1205820119871 sign (119911
119896minus V119896minus1)
(23)
A first order differentiator can be obtained by setting 119896 = 1and has the following form
0= minus1205821
10038161003816100381610038161199110 minus 119891 (119905)100381610038161003816100381612 sign (119911
0minus 119891 (119905)) + 119911
1
1= minus1205820sign (119911
0minus 119891 (119905))
(24)
where 1199110and 119911
1are the estimation of 119891(119905) and 119891(119905)
respectively The parameters 1205821= 15119871
12 1205820= 11119871 and
119871 are a positive constant to be selected via simulation asrecommended in [19]
4 Controllers Design
41 1-SM The procedure described in Section 31 will beapplied to regulate the output ℎ
2to a desired value119867 for the
coupled tanks system The sliding surface 120590 is selected as
120590 = 1+ 120582 (119909
1minus 119867) (25)
By taking the time derivative of (25) (26) is obtained asfollows
= 1+ 1205821 (26)
Substituting (10) and (11) in (26) yields
= 119891 (119909) + 119887 (119909) + 120582 (minus1198961radicℎ1+ 1198962radicℎ1minus ℎ2) (27)
On putting = 0 and solving for
=1
119887 (119909)[minus119891 (119909) minus 120582 (minus119896
1radicℎ1+ 1198962radicℎ1minus ℎ2)] (28)
Finally using (18) the control law for ℎ2is computed as
119906 =1
119887 (119909)[minus119891 (119909) minus 120582 (minus119896
1radicℎ1+ 1198962radicℎ1minus ℎ2)]
minus 119896 sign (120590) (29)
42 Twisting Controller Historically the first proposed 2-SMcontroller was the twisting controller It is defined by thefollowing formula
119906 (119905) = minus (1199031sign (120590) + 119903
2sign ()) (30)
This controller guarantees the appearance of a 2-slidingmode 120590 = = 0 attracting the trajectories of the slidingvariable dynamics in finite time if 119903
1and 119903
2satisfy the
following conditions
1199031gt 1199032gt 0
(1199031+ 1199032)119870119898minus 119862 gt (119903
1minus 1199032)119870119872
(1199031minus 1199032)119870119898gt 0
(31)
43 Super Twisting Controller The STC has the advantageover another algorithm in that it does not require the timederivatives of the sliding variables The algorithm has beendeveloped for the case of a system with relative degree one inorder to avoid chattering and its trajectories on the slidingplane are characterized by twisting around the origin Themerits of the STC are rejection of smooth disturbances ofarbitrary shape tracking of smooth references of arbitraryshape and the finite-time convergence to the set point A STCfor system which has relative degree of two was proposedin [20] The control law 119906(119905) consists of two terms The firstterm is its discontinuous time derivative and the second is acontinuous function of the available sliding variable as givenbelow
119906 (119905) = minus120582 |120590|12 sign (120590) + 119906
1
1=
minus119896119906 |119906| gt 119880119872
minus120572 sign (120590) |119906| le 119880119872
(32)
As stated in [19] for 119870119898gt 119862 and a sufficiently large 120572 the
controller guarantees the appearance of a 2-SMC in systemgiven in (23) which attracts the trajectories in finite time tozero A sufficient condition for finite time convergence is asfollows [19]
120582 gt radic2
(119870119898120572 minus 119862)
(119870119898120572 + 119862)119870
119872(1 + 119902)
1198702119898(1 minus 119902)
(33)
Mathematical Problems in Engineering 5
100 150
0
2
4
6
8
00 50 100 1500 50
100 1500 50 100 1500 50
2
4
6
8
0
2
4
6
8
0
2
4
6
8
Time (s)
Time (s)
Time (s)Time (s)
Time (s)
QCC
0 50 100 1500
2
4
6
8
PLC
Leve
l (cm
)
Leve
l (cm
)Le
vel (
cm)
Leve
l (cm
)
Leve
l (cm
)
SMC TA
STC
Figure 3 Level tracking test for the different controllers
44 Quasi-Continuous Controller (QCC) The homogeneousquasi-continuous (QCC) controller [21] requires the firstorder derivative of the sliding surface 120590 With the use ofdifferentiator in (25) the second order quasi-continuoussliding mode controller can be written as
119906 (119905) = minus1205721199111+ 120573 |120590|
12 sign (120590)100381610038161003816100381611991111003816100381610038161003816 + 120573 |120590|
12 (34)
The parameters 120572 and 120573 in (35) are positive constant to beselected via computer simulation
45 Prescribed Convergence Law Controller The controllerwith prescribed convergence law [19] is defined as
119906 (119905) = minus120572 sign ( + 120585 (120590)) (35)
where 120585(120590) is a continuous function smooth everywhereexcept at 120590 = 0 It is assumed that the solution of thedifferential equation +120585(120590) = 0 converges to 0 in finite timeChoosing 120585(120590) = 120573|120590|12 sign(120590) yields the controller
119906 (119905) = minus120572 sign ( + 120573 |120590|12 sign (120590)) (36)
6 Mathematical Problems in Engineering
0 50 100 150minus6
minus4
minus2
0
2
Time (s)
e
e(SMC)
0 50 100 150minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
0
2
Time (s)
ede
e(TA)de(TA)
0 50 100 150
0
2
Time (s)
e
STC
0 50 100 150
0
2
Time (s)
e
e(QCC)de(QCC)
0 50 100 150
0
2
Time (s)
ede
PLC
Figure 4 Error and its derivative for the different controllers
A sufficient condition for convergence is given as
120572119870119898minus 119862 gt
1205732
2 (37)
5 Simulation Results and Discussion
The characteristics of dynamic model of the coupled tankssystem are presented in Table 1 [8] The control input isrestricted to be between 119906min = 0 and 119906max = 50 [cm
3s] Thecomputer simulations are performed using a time interval
of [0 150] s The parameters of the controller are optimizedusing a step input with a final value of 6 cm for the waterlevel For the other tested water levels no more adjustment ofthe controllers parameters is performed Through extensivesimulation runs the optimum controllersrsquo parameters forthe different controllers tested in this study are reported inTable 2
Figure 3 shows the regulation performance for the testedcontrollers for a desired level of 6 cm Based on the figureit can be concluded that the controllers regulate the water
Mathematical Problems in Engineering 7
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
SMC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
TC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
STC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
QCC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
PCL
Figure 5 The control signals of the designed controllers
Table 1 Characteristic of the coupled tanks system
Gravitational rate 119892 981 cms2
Cross-sectional area of both tanks 2082 cm2
Area of the connecting pipe 1198861
058 cm2
Area of the outlet 1198862
024 cm2
level successfully with approximately the same performanceNote that the controllers are able to regulate any desiredwaterlevels without adjustments of any parameter
The behaviors of sliding surfaceserror are represented inFigure 4 for the desired level of 6 cm Based on the figureit can be seen that in all cases the controllers show typicalsliding mode behavior that is the error reaches 0 in finite
Table 2 Controllers parameters
Controller SMC TC STC QCC PCLParameters 120582 119896 119903
11199032
120572 120582 120572 120573 120572 120573
Value 067 90 500 100 220 14 65 2 100 1
time and stays 0 afterwards The derivative of error withrespect to time is also shown for the TA QCC and PLCcontrollers The error derivative also converges to zero Notethat in the case of the 1-SMC and STC the error derivatives arenot shown because the error derivatives do not play a majorrole in the design of the controller
Figure 5 shows the control signal of the five controllersThe controllers have the same control signal until they reach
8 Mathematical Problems in Engineering
Table 3 Time domain performancemeasures for different119867 values
119867 (cm) Controller 119879119903(s) 119879
119904(s) Os () IAE
300
SMC 29975 36626 1776 52459TA 30010 51783 7506 54823STC 30017 52124 7769 56214QCC 30010 51250 7085 54580PCL 30010 51576 7344 54704
600
SMC 69308 84162 0097 234125TA 69335 95179 2522 236066STC 69330 95560 2621 236735QCC 69335 94630 2393 235909PCL 69335 94975 2473 235973
800
SMC 101366 123310 0033 445981TA 101384 123330 1392 447400STC 101378 123315 1457 447537QCC 101384 123330 1327 447329PCL 101384 123330 1367 447357
the sliding surface The difference between the signals of the2-SM controllers is the increase of the on-off control in theorder STC and TA for the QCC and PCL respectively
To compare the performance of the controllers the timedomain performance measures such as the settling time therise time the percentage overshoot and the integral absoluteerror (IAE) are used The settling time is defined as the timerequired for the response to settle within 1of the steady statevalue The rise time is defined as the time required for theoutput to change from 10 to 90 of its final value The IAEis given by the following equation
IAE = int119905
0
|120590| 119889119905 (38)
The performancemeasures have been computed for threedifferent specified levels of 3 6 and 8 cm as listed in Table 3It can be seen from the table that all the used controllers haveapproximately the same rise time in all the cases The QCCcontroller has a slightly less settling overshoot and IAE
The results of the tracking test of the five controllersusing a square signal reference input are shown in Figure 6Based on the figure it can be observed that the trackingperformance for the all the controller is good In terms of theIAE the values obtained are listed in Table 4 From the valuesgiven in the Table 4 it can be seen that the smallest IAE isfor the 1-SM controller the 2-SMC have approximately thesame IAE From the comparison it can be reported that the1-SM controller slightly outperforms the 2-SM controller inall aspects but the controller requires more information thanthe 2-SM controllers as can be observed from Section 4
6 Conclusions
In this paper four second order sliding mode controllersnamely the twisting the super twisting the quasi-con-
0
2
4
6
8
Leve
l (cm
)
Ref
Ref
SMC
0
2
4
6
8
Leve
l (cm
)
TA
Ref
0
2
4
6
8
Leve
l (cm
)
STC
Ref
0
2
4
6
8
Leve
l (cm
)
QCC
Ref
0
2
4
6
8
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
Leve
l (cm
)
PLC
Figure 6 Level tracking test for the different controllers
Mathematical Problems in Engineering 9
Table 4 IAE for the different controllers from the tracking test
Controller SMC TA STC QCC PCLIAE 24232 24800 24751 24689 24842
tinuous and the prescribed convergence law controller havebeen successfully designed to regulate the water level in thesecond tank of a coupled tanks system The efficacy andusability of the proposed controllers are verified throughcomputer simulation tests Comparison between the con-trollers is based on the time domain performance measuresResults showed that all the controllers are able to regulate thewater level without major differences in their performanceComparison of the 2-SM controllers against 1-SM controllershowed that less information is required in the case of the 2-SM controller than the 1-SMC
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This project was financially supported by King Saud Univer-sity Vice Deanship of Research Chairs
References
[1] S K Singh N Katal and S G Modani ldquoMulti-objectiveoptimization of PID controller for coupled-tank liquid-levelcontrol system using genetic algorithmrdquo in Proceedings of theSecond International Conference on Soft Computing for ProblemSolving (SocProS 2012) December 28ndash30 2012 vol 236 ofAdvances in Intelligent Systems and Computing pp 59ndash66Springer New Delhi India 2014
[2] J-X Xu C-C Hang and C Liu ldquoParallel structure and tuningof a fuzzy PID controllerrdquo Automatica vol 36 no 5 pp 673ndash684 2000
[3] N K Poulsen B Kouvaritakis and M Cannon ldquoNonlinearconstrained predictive control applied to a coupled-tanks appa-ratusrdquo IEE Proceedings Control Theory and Applications vol148 no 1 pp 17ndash24 2001
[4] AKumarMVashishth and L Rai ldquoLiquid level control of cou-pled tank system using fractional PID controllerrdquo InternationalJournal of Emerging Trends in Electrical and Electronics vol 3no 1 2013
[5] V Utkin J Guldner and M Shijun Sliding Mode Control inElectro-Mechanical Systems vol 34 CRC Press 1999
[6] C Edwards and S Spurgeon Sliding Mode Control Theory andApplications CRC Press 1998
[7] K D Young V I Utkin and U Ozguner ldquoA control engineerrsquosguide to sliding mode controlrdquo IEEE Transactions on ControlSystems Technology vol 7 no 3 pp 328ndash342 1999
[8] N B Almutairi and M Zribi ldquoSliding mode control of coupledtanksrdquoMechatronics vol 16 no 7 pp 427ndash441 2006
[9] S Aydin and S Tokat ldquoSliding mode control of a coupledtank system with a state varying sliding surface parameterrdquo
in Proceedings of the IEEE International Workshop on VariableStructure Systems (VSS rsquo08) pp 355ndash360 IEEE Antalya TurkeyJune 2008
[10] A Boubakir F Boudjema and S Labiod ldquoA neuro-fuzzy-sliding mode controller using nonlinear sliding surface appliedto the coupled tanks systemrdquo International Journal of Automa-tion and Computing vol 6 no 1 pp 72ndash80 2009
[11] M K Khan and S K Spurgeon ldquoRobust MIMO water levelcontrol in interconnected twin-tanks using second order slidingmode controlrdquo Control Engineering Practice vol 14 no 4 pp375ndash386 2006
[12] C Pukdeboon ldquoSecond-order sliding mode controllers forspacecraft relative translationrdquo Applied Mathematical Sciencesvol 6 no 100 pp 4965ndash4979 2012
[13] I Eker ldquoSecond-order sliding mode control with experimentalapplicationrdquo ISA Transactions vol 49 no 3 pp 394ndash405 2010
[14] S Mondal and C Mahanta ldquoComposite nonlinear feedbackbased discrete integral sliding mode controller for uncertainsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 17 no 3 pp 1320ndash1331 2012
[15] S Mondal and C Mahanta ldquoNonlinear sliding surface basedsecond order sliding mode controller for uncertain linearsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 9 pp 3760ndash3769 2011
[16] S Mondal and CMahanta ldquoA fast converging robust controllerusing adaptive second order sliding moderdquo ISA Transactionsvol 51 no 6 pp 713ndash721 2012
[17] M Defoort T Floquet A Kokosy andW Perruquetti ldquoA novelhigher order sliding mode control schemerdquo Systems amp ControlLetters vol 58 no 2 pp 102ndash108 2009
[18] A Levant ldquoHigher-order sliding modes differentiation andoutput-feedback controlrdquo International Journal of Control vol76 no 9-10 pp 924ndash941 2003
[19] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Birkhauser 1st edition 2014
[20] M K Khan S K Spurgeon and A Levant ldquoSimple outputfeedback 2-sliding controller for systems of relative degree twordquoin Proceedings of the European Control Conference (ECC rsquo03)vol 3 September 2003
[21] A Levant ldquoQuasi-continuous high-order sliding-mode con-trollersrdquo IEEE Transactions on Automatic Control vol 50 no11 pp 1812ndash1816 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
2-SMC are widely used twisting controllers and its modifiedvariant the super twisting controllers the quasi-continuouscontrollers the suboptimal control algorithm and the controlalgorithm with prescribed convergence law
Khan and Spurgeon [11] applied a second order slidingmode control idea to control a coupled tank system
The super twisting and adaptive super twisting controlalgorithms are developed for the two-spacecraft formationflying system in [12] A 2-SMC is proposed for secondorder uncertain plants using equivalent control approachto improve the performance of control systems in [13] Adiscrete integral sliding mode controller based on compositenonlinear feedback method to improve the transient perfor-mance of uncertain systems is proposed in [14] A secondorder sliding mode controller using nonlinear sliding surfaceto guarantee stability as well as to enhance the transientperformance of uncertain linear systems with parametricuncertainty has been proposed in [15] An adaptive secondorder slidingmode controller with a nonlinear sliding surfacethat consists of a gain matrix having a variable damping ratiohas been presented in [16] A higher order sliding modecontrol algorithm is described for a class of uncertain multi-input multioutput nonlinear systems and the developedalgorithm was applied on a hovercraft vessel control [17]
Despite the many existing publications related to the 2-SMC there is a lack of articles that compare performance ofdifferent types of 2-SMC in water level of the second tank inthe coupled tanks system from one side and between themand the first order controller from the other side Moreoverto the best of authorsrsquo knowledge there is no publishedwork concerning the 2-SMC especially which contains thedetailed analysis of the time domain controlmeasures and thetracking performance of the well-known controller
In this paper robustness of four classes of 2-SMCnamely twisting (TA) the super twisting (STC) prescribedconvergence law controller (PCL) and the quasi-continuouscontroller (QCC) to regulate the water level of the secondtank in the coupled tanks system is introduced and theirperformances are compared Moreover the performances ofthe four controllers mentioned above are compared with afirst order controller to show the merits of these controllers
The remaining structure of this paper is as follows In thenext section the dynamic model of the coupled tank systemwill be explained Section 3 briefly provides the basics of the1-SMC controller and the 2-SMC In Section 4 2-SMCwill bedescribed briefly In Section 5 the simulation results from theapplication of the controller will be presented and discussedFinally Section 6 includes the concluding remarks based onthe results obtained
2 Mathematical Modeling ofthe Coupled Tanks System
Figure 1 shows a schematic diagram of the two-coupled tankssystem The tanks system consists of two connected tanks Apump supplies the water into the first tank The second tankis filled from the first tank via a connecting pipe An outlet islocated at the bottom of the second tank to change the output
q
q1q2
h1h2
Figure 1 A schematic diagram of the two-coupled tanks system
flow 1199022Themathematical model of the coupled tanks system
is nonlinear and can be derived as followsApplying the flow balance equation for Tanks 1 and 2
119889ℎ1
119889119905=1
119860(119902 minus 119902
1)
119889ℎ2
119889119905=1
119860(1199021minus 1199022)
(1)
In (1) 1199021and 1199022are defined as
1199021= 1198861radic2119892 (ℎ
1minus ℎ2) for ℎ
1gt ℎ2
1199022= 1198862radic2119892ℎ
2for ℎ2gt 0
(2)
where ℎ1and ℎ
2are the water level in Tank 1 and Tank 2
respectively 119902 is the inlet flow rate 1199021is the flow rate from
Tank 1 to Tank 2119860 is the cross section area for both tanks 1198861
is the area of pipe connecting the two tanks 1198862is the area of
the outlet and 119892 is the constant of gravity If the inlet flow 119902 isselected as input and the liquid level ℎ
2in the second tank as
output the system can be considered as a single input singleoutput system (SISO) The two tanks system can be modeledby the following two differential equations
119889ℎ1
119889119905= minus1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 +119902
119860 (3)
119889ℎ2
119889119905= 1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 minus 1198962radicℎ2 (4)
The parameters 1198961and 1198962are defined by
1198961=1198861radic2119892
119860
1198962=1198862radic2119892
119860
(5)
Note that 119902 is always positive whichmeans that the pumpcan pump water into the tank (119902 ge 0) At equilibrium forconstant water level set point the derivatives of the waterlevels with respect to time in the two tanks must be zero sothat the following condition can be written
119889ℎ1
119889119905=119889ℎ2
119889119905= 0 (6)
Mathematical Problems in Engineering 3
Therefore using (6) in (3) and (4) the following algebraicrelationships hold
minus1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 +119902
119860
1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 minus 1198962radicℎ2
(7)
The equilibrium flow rate 119902 can be calculated as
119902 = minus1198601198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816(8)
To satisfy the constraint on the input flow rate the term1198961sign(ℎ
1minus ℎ2) ge 0 which implies ℎ
1ge ℎ2 Then the
dynamics model can be written as
119889ℎ1
119889119905= minus1198961radicℎ1minus ℎ2+ 1198962radicℎ2
119889ℎ2
119889119905= minus1198961radicℎ1minus ℎ2minus 21198962radicℎ2+1
119860119906
(9)
Using the following transformation
1199091= ℎ1
1199092= minus1198961radicℎ1+ 1198962radicℎ1minus ℎ2
(10)
(9) can be written as
1= 1199092
2= 119891 (119909 119905) + 119887 (119909 119905) 119906
119910 = 1199091
(11)
It can be easily checked that119891(119909 119905) and 119887(119909 119905) in (11) havethe following form
119891 (119909 119905) =11989611198962
2(
radicℎ2
radicℎ1minus ℎ2
minusradicℎ1minus ℎ2
radicℎ2
) +1198962
1
2minus 1198962
2 (12)
119887 (119909 119905) =1198962
2119860
1
radicℎ1minus ℎ2
(13)
3 Sliding Mode Control
31 1-SMC Thedynamics of a second order nonlinear systemcan be written as
= 119891 (119909) + 119887 (119909) 119906 (14)
where 119909(119905) is the state and 119906(119905) is the control input vectorsrespectively 119891(119909 119905) and 119887(119909 119905) are unknown nonlinear func-tions of time and states The functions 119891(119909) and 119887(119909) arenot exactly known with upper bounded uncertainties Thecontrol problem let the state 119909 track a specified time-varyingstate 119909
119889 The required sliding surface to control this system
can be defined as
119878 = 119890 + 120582119890 (15)
119890 = 119909 minus 119909119903is an error vector and 120582 is a constant parameter
which dictated the slope of the sliding surface Differentiating(16) and inserting (15) and then putting 119878 = 0 and solving for119906 result in the following control law
= minus119891 ( 119909) + 119889+ 120582 119909 (16)
and define the control law
119906 = minus 119896 sign (119904) (17)
where 120582 and 119896 are strictly positive constant 119896 can be selectedhigh to cope with uncertainty A sufficient condition for theconvergence to a sliding mode is
1
2
119889
11988911990521199042le minus120578 |119904| (18)
120578 is a positive constant Equation (18) is called reaching orsliding condition The signum function in (17) is defined as
sign (119909) =
minus1 119909 lt 0
0 119909 = 0
1 119909 gt 0
(19)
Commonly in 1-SMC to avoid chattering the signumfunction is replaced by a smooth function to create a bound-ary layer around the sliding surface For example a saturationfunction can be used and is given by
sat (120590) =
sign (120590) if |120590| gt 120593120590
120593if |120590| le 120593
(20)
In (22) 120593 is a positive constant which defines the thickness ofthe boundary layer
32 2-SMC 2-SMC control is a subset of HOSMC It differsfrom the 1-SMC by including the first order derivative of thesliding variable while maintaining the same robustness andperformance as that of the 1-SMC 120590 isin R in an output of(15) to be exactly stabilized in finite time at 120590 = 0 119906 isin R
is the control input and 119909 isin R119899 is the state If the output 120590has a fixed and known relative degree 119903 isin R119899 then for thepositive constants 119870
119898 119870119872 and 119862 the following inequalities
hold globally
0 lt 119870119898le 119887 le 119870
119872
10038161003816100381610038161198911003816100381610038161003816 le 119862
(21)
2-SMCmay be considered as controllers for the followingdifferential inclusion [18]
isin [minus119862 119862] + [119870119898 119870119872] 119906 (22)
2-SM controllers allow solving the problem of finite-timestabilization of a black box system as shown in Figure 2 Theonly information needed from the system is the output
4 Mathematical Problems in Engineering
r(t)
+minus
120590(t)
Diff
HOSMCu(t)
System
y(t)
Figure 2 Block diagram of a black box controller
The required derivative can be obtained by usingHOSMCarbitrary order differentiator [19]The real time differentiatorhas the general form as in the following set of equations In(24) 119891(119905) represents signal to be differentiated 119896 minus 1 timesConsider
0= V0
1= V1V0
= minus1205821198961198711(119896+1) 10038161003816100381610038161199110 minus 119891 (119905)
1003816100381610038161003816119896(119896+1) sign (119911
0minus 119891 (119905))
+ 1199111
V1= minus120582119896minus11198711119896 10038161003816100381610038161199111 minus V0
1003816100381610038161003816(119896minus1)119896 sign (119911
1minus V0) + 1199112
119896minus1= V119896minus1
= minus120582111987112 1003816100381610038161003816119911119896minus1 minus V119896minus2
1003816100381610038161003816119896(119896+1) sign (119911
119896minus1minus V119896minus2)
+ 119911119896
119896= 1205820119871 sign (119911
119896minus V119896minus1)
(23)
A first order differentiator can be obtained by setting 119896 = 1and has the following form
0= minus1205821
10038161003816100381610038161199110 minus 119891 (119905)100381610038161003816100381612 sign (119911
0minus 119891 (119905)) + 119911
1
1= minus1205820sign (119911
0minus 119891 (119905))
(24)
where 1199110and 119911
1are the estimation of 119891(119905) and 119891(119905)
respectively The parameters 1205821= 15119871
12 1205820= 11119871 and
119871 are a positive constant to be selected via simulation asrecommended in [19]
4 Controllers Design
41 1-SM The procedure described in Section 31 will beapplied to regulate the output ℎ
2to a desired value119867 for the
coupled tanks system The sliding surface 120590 is selected as
120590 = 1+ 120582 (119909
1minus 119867) (25)
By taking the time derivative of (25) (26) is obtained asfollows
= 1+ 1205821 (26)
Substituting (10) and (11) in (26) yields
= 119891 (119909) + 119887 (119909) + 120582 (minus1198961radicℎ1+ 1198962radicℎ1minus ℎ2) (27)
On putting = 0 and solving for
=1
119887 (119909)[minus119891 (119909) minus 120582 (minus119896
1radicℎ1+ 1198962radicℎ1minus ℎ2)] (28)
Finally using (18) the control law for ℎ2is computed as
119906 =1
119887 (119909)[minus119891 (119909) minus 120582 (minus119896
1radicℎ1+ 1198962radicℎ1minus ℎ2)]
minus 119896 sign (120590) (29)
42 Twisting Controller Historically the first proposed 2-SMcontroller was the twisting controller It is defined by thefollowing formula
119906 (119905) = minus (1199031sign (120590) + 119903
2sign ()) (30)
This controller guarantees the appearance of a 2-slidingmode 120590 = = 0 attracting the trajectories of the slidingvariable dynamics in finite time if 119903
1and 119903
2satisfy the
following conditions
1199031gt 1199032gt 0
(1199031+ 1199032)119870119898minus 119862 gt (119903
1minus 1199032)119870119872
(1199031minus 1199032)119870119898gt 0
(31)
43 Super Twisting Controller The STC has the advantageover another algorithm in that it does not require the timederivatives of the sliding variables The algorithm has beendeveloped for the case of a system with relative degree one inorder to avoid chattering and its trajectories on the slidingplane are characterized by twisting around the origin Themerits of the STC are rejection of smooth disturbances ofarbitrary shape tracking of smooth references of arbitraryshape and the finite-time convergence to the set point A STCfor system which has relative degree of two was proposedin [20] The control law 119906(119905) consists of two terms The firstterm is its discontinuous time derivative and the second is acontinuous function of the available sliding variable as givenbelow
119906 (119905) = minus120582 |120590|12 sign (120590) + 119906
1
1=
minus119896119906 |119906| gt 119880119872
minus120572 sign (120590) |119906| le 119880119872
(32)
As stated in [19] for 119870119898gt 119862 and a sufficiently large 120572 the
controller guarantees the appearance of a 2-SMC in systemgiven in (23) which attracts the trajectories in finite time tozero A sufficient condition for finite time convergence is asfollows [19]
120582 gt radic2
(119870119898120572 minus 119862)
(119870119898120572 + 119862)119870
119872(1 + 119902)
1198702119898(1 minus 119902)
(33)
Mathematical Problems in Engineering 5
100 150
0
2
4
6
8
00 50 100 1500 50
100 1500 50 100 1500 50
2
4
6
8
0
2
4
6
8
0
2
4
6
8
Time (s)
Time (s)
Time (s)Time (s)
Time (s)
QCC
0 50 100 1500
2
4
6
8
PLC
Leve
l (cm
)
Leve
l (cm
)Le
vel (
cm)
Leve
l (cm
)
Leve
l (cm
)
SMC TA
STC
Figure 3 Level tracking test for the different controllers
44 Quasi-Continuous Controller (QCC) The homogeneousquasi-continuous (QCC) controller [21] requires the firstorder derivative of the sliding surface 120590 With the use ofdifferentiator in (25) the second order quasi-continuoussliding mode controller can be written as
119906 (119905) = minus1205721199111+ 120573 |120590|
12 sign (120590)100381610038161003816100381611991111003816100381610038161003816 + 120573 |120590|
12 (34)
The parameters 120572 and 120573 in (35) are positive constant to beselected via computer simulation
45 Prescribed Convergence Law Controller The controllerwith prescribed convergence law [19] is defined as
119906 (119905) = minus120572 sign ( + 120585 (120590)) (35)
where 120585(120590) is a continuous function smooth everywhereexcept at 120590 = 0 It is assumed that the solution of thedifferential equation +120585(120590) = 0 converges to 0 in finite timeChoosing 120585(120590) = 120573|120590|12 sign(120590) yields the controller
119906 (119905) = minus120572 sign ( + 120573 |120590|12 sign (120590)) (36)
6 Mathematical Problems in Engineering
0 50 100 150minus6
minus4
minus2
0
2
Time (s)
e
e(SMC)
0 50 100 150minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
0
2
Time (s)
ede
e(TA)de(TA)
0 50 100 150
0
2
Time (s)
e
STC
0 50 100 150
0
2
Time (s)
e
e(QCC)de(QCC)
0 50 100 150
0
2
Time (s)
ede
PLC
Figure 4 Error and its derivative for the different controllers
A sufficient condition for convergence is given as
120572119870119898minus 119862 gt
1205732
2 (37)
5 Simulation Results and Discussion
The characteristics of dynamic model of the coupled tankssystem are presented in Table 1 [8] The control input isrestricted to be between 119906min = 0 and 119906max = 50 [cm
3s] Thecomputer simulations are performed using a time interval
of [0 150] s The parameters of the controller are optimizedusing a step input with a final value of 6 cm for the waterlevel For the other tested water levels no more adjustment ofthe controllers parameters is performed Through extensivesimulation runs the optimum controllersrsquo parameters forthe different controllers tested in this study are reported inTable 2
Figure 3 shows the regulation performance for the testedcontrollers for a desired level of 6 cm Based on the figureit can be concluded that the controllers regulate the water
Mathematical Problems in Engineering 7
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
SMC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
TC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
STC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
QCC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
PCL
Figure 5 The control signals of the designed controllers
Table 1 Characteristic of the coupled tanks system
Gravitational rate 119892 981 cms2
Cross-sectional area of both tanks 2082 cm2
Area of the connecting pipe 1198861
058 cm2
Area of the outlet 1198862
024 cm2
level successfully with approximately the same performanceNote that the controllers are able to regulate any desiredwaterlevels without adjustments of any parameter
The behaviors of sliding surfaceserror are represented inFigure 4 for the desired level of 6 cm Based on the figureit can be seen that in all cases the controllers show typicalsliding mode behavior that is the error reaches 0 in finite
Table 2 Controllers parameters
Controller SMC TC STC QCC PCLParameters 120582 119896 119903
11199032
120572 120582 120572 120573 120572 120573
Value 067 90 500 100 220 14 65 2 100 1
time and stays 0 afterwards The derivative of error withrespect to time is also shown for the TA QCC and PLCcontrollers The error derivative also converges to zero Notethat in the case of the 1-SMC and STC the error derivatives arenot shown because the error derivatives do not play a majorrole in the design of the controller
Figure 5 shows the control signal of the five controllersThe controllers have the same control signal until they reach
8 Mathematical Problems in Engineering
Table 3 Time domain performancemeasures for different119867 values
119867 (cm) Controller 119879119903(s) 119879
119904(s) Os () IAE
300
SMC 29975 36626 1776 52459TA 30010 51783 7506 54823STC 30017 52124 7769 56214QCC 30010 51250 7085 54580PCL 30010 51576 7344 54704
600
SMC 69308 84162 0097 234125TA 69335 95179 2522 236066STC 69330 95560 2621 236735QCC 69335 94630 2393 235909PCL 69335 94975 2473 235973
800
SMC 101366 123310 0033 445981TA 101384 123330 1392 447400STC 101378 123315 1457 447537QCC 101384 123330 1327 447329PCL 101384 123330 1367 447357
the sliding surface The difference between the signals of the2-SM controllers is the increase of the on-off control in theorder STC and TA for the QCC and PCL respectively
To compare the performance of the controllers the timedomain performance measures such as the settling time therise time the percentage overshoot and the integral absoluteerror (IAE) are used The settling time is defined as the timerequired for the response to settle within 1of the steady statevalue The rise time is defined as the time required for theoutput to change from 10 to 90 of its final value The IAEis given by the following equation
IAE = int119905
0
|120590| 119889119905 (38)
The performancemeasures have been computed for threedifferent specified levels of 3 6 and 8 cm as listed in Table 3It can be seen from the table that all the used controllers haveapproximately the same rise time in all the cases The QCCcontroller has a slightly less settling overshoot and IAE
The results of the tracking test of the five controllersusing a square signal reference input are shown in Figure 6Based on the figure it can be observed that the trackingperformance for the all the controller is good In terms of theIAE the values obtained are listed in Table 4 From the valuesgiven in the Table 4 it can be seen that the smallest IAE isfor the 1-SM controller the 2-SMC have approximately thesame IAE From the comparison it can be reported that the1-SM controller slightly outperforms the 2-SM controller inall aspects but the controller requires more information thanthe 2-SM controllers as can be observed from Section 4
6 Conclusions
In this paper four second order sliding mode controllersnamely the twisting the super twisting the quasi-con-
0
2
4
6
8
Leve
l (cm
)
Ref
Ref
SMC
0
2
4
6
8
Leve
l (cm
)
TA
Ref
0
2
4
6
8
Leve
l (cm
)
STC
Ref
0
2
4
6
8
Leve
l (cm
)
QCC
Ref
0
2
4
6
8
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
Leve
l (cm
)
PLC
Figure 6 Level tracking test for the different controllers
Mathematical Problems in Engineering 9
Table 4 IAE for the different controllers from the tracking test
Controller SMC TA STC QCC PCLIAE 24232 24800 24751 24689 24842
tinuous and the prescribed convergence law controller havebeen successfully designed to regulate the water level in thesecond tank of a coupled tanks system The efficacy andusability of the proposed controllers are verified throughcomputer simulation tests Comparison between the con-trollers is based on the time domain performance measuresResults showed that all the controllers are able to regulate thewater level without major differences in their performanceComparison of the 2-SM controllers against 1-SM controllershowed that less information is required in the case of the 2-SM controller than the 1-SMC
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This project was financially supported by King Saud Univer-sity Vice Deanship of Research Chairs
References
[1] S K Singh N Katal and S G Modani ldquoMulti-objectiveoptimization of PID controller for coupled-tank liquid-levelcontrol system using genetic algorithmrdquo in Proceedings of theSecond International Conference on Soft Computing for ProblemSolving (SocProS 2012) December 28ndash30 2012 vol 236 ofAdvances in Intelligent Systems and Computing pp 59ndash66Springer New Delhi India 2014
[2] J-X Xu C-C Hang and C Liu ldquoParallel structure and tuningof a fuzzy PID controllerrdquo Automatica vol 36 no 5 pp 673ndash684 2000
[3] N K Poulsen B Kouvaritakis and M Cannon ldquoNonlinearconstrained predictive control applied to a coupled-tanks appa-ratusrdquo IEE Proceedings Control Theory and Applications vol148 no 1 pp 17ndash24 2001
[4] AKumarMVashishth and L Rai ldquoLiquid level control of cou-pled tank system using fractional PID controllerrdquo InternationalJournal of Emerging Trends in Electrical and Electronics vol 3no 1 2013
[5] V Utkin J Guldner and M Shijun Sliding Mode Control inElectro-Mechanical Systems vol 34 CRC Press 1999
[6] C Edwards and S Spurgeon Sliding Mode Control Theory andApplications CRC Press 1998
[7] K D Young V I Utkin and U Ozguner ldquoA control engineerrsquosguide to sliding mode controlrdquo IEEE Transactions on ControlSystems Technology vol 7 no 3 pp 328ndash342 1999
[8] N B Almutairi and M Zribi ldquoSliding mode control of coupledtanksrdquoMechatronics vol 16 no 7 pp 427ndash441 2006
[9] S Aydin and S Tokat ldquoSliding mode control of a coupledtank system with a state varying sliding surface parameterrdquo
in Proceedings of the IEEE International Workshop on VariableStructure Systems (VSS rsquo08) pp 355ndash360 IEEE Antalya TurkeyJune 2008
[10] A Boubakir F Boudjema and S Labiod ldquoA neuro-fuzzy-sliding mode controller using nonlinear sliding surface appliedto the coupled tanks systemrdquo International Journal of Automa-tion and Computing vol 6 no 1 pp 72ndash80 2009
[11] M K Khan and S K Spurgeon ldquoRobust MIMO water levelcontrol in interconnected twin-tanks using second order slidingmode controlrdquo Control Engineering Practice vol 14 no 4 pp375ndash386 2006
[12] C Pukdeboon ldquoSecond-order sliding mode controllers forspacecraft relative translationrdquo Applied Mathematical Sciencesvol 6 no 100 pp 4965ndash4979 2012
[13] I Eker ldquoSecond-order sliding mode control with experimentalapplicationrdquo ISA Transactions vol 49 no 3 pp 394ndash405 2010
[14] S Mondal and C Mahanta ldquoComposite nonlinear feedbackbased discrete integral sliding mode controller for uncertainsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 17 no 3 pp 1320ndash1331 2012
[15] S Mondal and C Mahanta ldquoNonlinear sliding surface basedsecond order sliding mode controller for uncertain linearsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 9 pp 3760ndash3769 2011
[16] S Mondal and CMahanta ldquoA fast converging robust controllerusing adaptive second order sliding moderdquo ISA Transactionsvol 51 no 6 pp 713ndash721 2012
[17] M Defoort T Floquet A Kokosy andW Perruquetti ldquoA novelhigher order sliding mode control schemerdquo Systems amp ControlLetters vol 58 no 2 pp 102ndash108 2009
[18] A Levant ldquoHigher-order sliding modes differentiation andoutput-feedback controlrdquo International Journal of Control vol76 no 9-10 pp 924ndash941 2003
[19] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Birkhauser 1st edition 2014
[20] M K Khan S K Spurgeon and A Levant ldquoSimple outputfeedback 2-sliding controller for systems of relative degree twordquoin Proceedings of the European Control Conference (ECC rsquo03)vol 3 September 2003
[21] A Levant ldquoQuasi-continuous high-order sliding-mode con-trollersrdquo IEEE Transactions on Automatic Control vol 50 no11 pp 1812ndash1816 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Therefore using (6) in (3) and (4) the following algebraicrelationships hold
minus1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 +119902
119860
1198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816 minus 1198962radicℎ2
(7)
The equilibrium flow rate 119902 can be calculated as
119902 = minus1198601198961sign (ℎ
1minus ℎ2)radic1003816100381610038161003816ℎ1 minus ℎ2
1003816100381610038161003816(8)
To satisfy the constraint on the input flow rate the term1198961sign(ℎ
1minus ℎ2) ge 0 which implies ℎ
1ge ℎ2 Then the
dynamics model can be written as
119889ℎ1
119889119905= minus1198961radicℎ1minus ℎ2+ 1198962radicℎ2
119889ℎ2
119889119905= minus1198961radicℎ1minus ℎ2minus 21198962radicℎ2+1
119860119906
(9)
Using the following transformation
1199091= ℎ1
1199092= minus1198961radicℎ1+ 1198962radicℎ1minus ℎ2
(10)
(9) can be written as
1= 1199092
2= 119891 (119909 119905) + 119887 (119909 119905) 119906
119910 = 1199091
(11)
It can be easily checked that119891(119909 119905) and 119887(119909 119905) in (11) havethe following form
119891 (119909 119905) =11989611198962
2(
radicℎ2
radicℎ1minus ℎ2
minusradicℎ1minus ℎ2
radicℎ2
) +1198962
1
2minus 1198962
2 (12)
119887 (119909 119905) =1198962
2119860
1
radicℎ1minus ℎ2
(13)
3 Sliding Mode Control
31 1-SMC Thedynamics of a second order nonlinear systemcan be written as
= 119891 (119909) + 119887 (119909) 119906 (14)
where 119909(119905) is the state and 119906(119905) is the control input vectorsrespectively 119891(119909 119905) and 119887(119909 119905) are unknown nonlinear func-tions of time and states The functions 119891(119909) and 119887(119909) arenot exactly known with upper bounded uncertainties Thecontrol problem let the state 119909 track a specified time-varyingstate 119909
119889 The required sliding surface to control this system
can be defined as
119878 = 119890 + 120582119890 (15)
119890 = 119909 minus 119909119903is an error vector and 120582 is a constant parameter
which dictated the slope of the sliding surface Differentiating(16) and inserting (15) and then putting 119878 = 0 and solving for119906 result in the following control law
= minus119891 ( 119909) + 119889+ 120582 119909 (16)
and define the control law
119906 = minus 119896 sign (119904) (17)
where 120582 and 119896 are strictly positive constant 119896 can be selectedhigh to cope with uncertainty A sufficient condition for theconvergence to a sliding mode is
1
2
119889
11988911990521199042le minus120578 |119904| (18)
120578 is a positive constant Equation (18) is called reaching orsliding condition The signum function in (17) is defined as
sign (119909) =
minus1 119909 lt 0
0 119909 = 0
1 119909 gt 0
(19)
Commonly in 1-SMC to avoid chattering the signumfunction is replaced by a smooth function to create a bound-ary layer around the sliding surface For example a saturationfunction can be used and is given by
sat (120590) =
sign (120590) if |120590| gt 120593120590
120593if |120590| le 120593
(20)
In (22) 120593 is a positive constant which defines the thickness ofthe boundary layer
32 2-SMC 2-SMC control is a subset of HOSMC It differsfrom the 1-SMC by including the first order derivative of thesliding variable while maintaining the same robustness andperformance as that of the 1-SMC 120590 isin R in an output of(15) to be exactly stabilized in finite time at 120590 = 0 119906 isin R
is the control input and 119909 isin R119899 is the state If the output 120590has a fixed and known relative degree 119903 isin R119899 then for thepositive constants 119870
119898 119870119872 and 119862 the following inequalities
hold globally
0 lt 119870119898le 119887 le 119870
119872
10038161003816100381610038161198911003816100381610038161003816 le 119862
(21)
2-SMCmay be considered as controllers for the followingdifferential inclusion [18]
isin [minus119862 119862] + [119870119898 119870119872] 119906 (22)
2-SM controllers allow solving the problem of finite-timestabilization of a black box system as shown in Figure 2 Theonly information needed from the system is the output
4 Mathematical Problems in Engineering
r(t)
+minus
120590(t)
Diff
HOSMCu(t)
System
y(t)
Figure 2 Block diagram of a black box controller
The required derivative can be obtained by usingHOSMCarbitrary order differentiator [19]The real time differentiatorhas the general form as in the following set of equations In(24) 119891(119905) represents signal to be differentiated 119896 minus 1 timesConsider
0= V0
1= V1V0
= minus1205821198961198711(119896+1) 10038161003816100381610038161199110 minus 119891 (119905)
1003816100381610038161003816119896(119896+1) sign (119911
0minus 119891 (119905))
+ 1199111
V1= minus120582119896minus11198711119896 10038161003816100381610038161199111 minus V0
1003816100381610038161003816(119896minus1)119896 sign (119911
1minus V0) + 1199112
119896minus1= V119896minus1
= minus120582111987112 1003816100381610038161003816119911119896minus1 minus V119896minus2
1003816100381610038161003816119896(119896+1) sign (119911
119896minus1minus V119896minus2)
+ 119911119896
119896= 1205820119871 sign (119911
119896minus V119896minus1)
(23)
A first order differentiator can be obtained by setting 119896 = 1and has the following form
0= minus1205821
10038161003816100381610038161199110 minus 119891 (119905)100381610038161003816100381612 sign (119911
0minus 119891 (119905)) + 119911
1
1= minus1205820sign (119911
0minus 119891 (119905))
(24)
where 1199110and 119911
1are the estimation of 119891(119905) and 119891(119905)
respectively The parameters 1205821= 15119871
12 1205820= 11119871 and
119871 are a positive constant to be selected via simulation asrecommended in [19]
4 Controllers Design
41 1-SM The procedure described in Section 31 will beapplied to regulate the output ℎ
2to a desired value119867 for the
coupled tanks system The sliding surface 120590 is selected as
120590 = 1+ 120582 (119909
1minus 119867) (25)
By taking the time derivative of (25) (26) is obtained asfollows
= 1+ 1205821 (26)
Substituting (10) and (11) in (26) yields
= 119891 (119909) + 119887 (119909) + 120582 (minus1198961radicℎ1+ 1198962radicℎ1minus ℎ2) (27)
On putting = 0 and solving for
=1
119887 (119909)[minus119891 (119909) minus 120582 (minus119896
1radicℎ1+ 1198962radicℎ1minus ℎ2)] (28)
Finally using (18) the control law for ℎ2is computed as
119906 =1
119887 (119909)[minus119891 (119909) minus 120582 (minus119896
1radicℎ1+ 1198962radicℎ1minus ℎ2)]
minus 119896 sign (120590) (29)
42 Twisting Controller Historically the first proposed 2-SMcontroller was the twisting controller It is defined by thefollowing formula
119906 (119905) = minus (1199031sign (120590) + 119903
2sign ()) (30)
This controller guarantees the appearance of a 2-slidingmode 120590 = = 0 attracting the trajectories of the slidingvariable dynamics in finite time if 119903
1and 119903
2satisfy the
following conditions
1199031gt 1199032gt 0
(1199031+ 1199032)119870119898minus 119862 gt (119903
1minus 1199032)119870119872
(1199031minus 1199032)119870119898gt 0
(31)
43 Super Twisting Controller The STC has the advantageover another algorithm in that it does not require the timederivatives of the sliding variables The algorithm has beendeveloped for the case of a system with relative degree one inorder to avoid chattering and its trajectories on the slidingplane are characterized by twisting around the origin Themerits of the STC are rejection of smooth disturbances ofarbitrary shape tracking of smooth references of arbitraryshape and the finite-time convergence to the set point A STCfor system which has relative degree of two was proposedin [20] The control law 119906(119905) consists of two terms The firstterm is its discontinuous time derivative and the second is acontinuous function of the available sliding variable as givenbelow
119906 (119905) = minus120582 |120590|12 sign (120590) + 119906
1
1=
minus119896119906 |119906| gt 119880119872
minus120572 sign (120590) |119906| le 119880119872
(32)
As stated in [19] for 119870119898gt 119862 and a sufficiently large 120572 the
controller guarantees the appearance of a 2-SMC in systemgiven in (23) which attracts the trajectories in finite time tozero A sufficient condition for finite time convergence is asfollows [19]
120582 gt radic2
(119870119898120572 minus 119862)
(119870119898120572 + 119862)119870
119872(1 + 119902)
1198702119898(1 minus 119902)
(33)
Mathematical Problems in Engineering 5
100 150
0
2
4
6
8
00 50 100 1500 50
100 1500 50 100 1500 50
2
4
6
8
0
2
4
6
8
0
2
4
6
8
Time (s)
Time (s)
Time (s)Time (s)
Time (s)
QCC
0 50 100 1500
2
4
6
8
PLC
Leve
l (cm
)
Leve
l (cm
)Le
vel (
cm)
Leve
l (cm
)
Leve
l (cm
)
SMC TA
STC
Figure 3 Level tracking test for the different controllers
44 Quasi-Continuous Controller (QCC) The homogeneousquasi-continuous (QCC) controller [21] requires the firstorder derivative of the sliding surface 120590 With the use ofdifferentiator in (25) the second order quasi-continuoussliding mode controller can be written as
119906 (119905) = minus1205721199111+ 120573 |120590|
12 sign (120590)100381610038161003816100381611991111003816100381610038161003816 + 120573 |120590|
12 (34)
The parameters 120572 and 120573 in (35) are positive constant to beselected via computer simulation
45 Prescribed Convergence Law Controller The controllerwith prescribed convergence law [19] is defined as
119906 (119905) = minus120572 sign ( + 120585 (120590)) (35)
where 120585(120590) is a continuous function smooth everywhereexcept at 120590 = 0 It is assumed that the solution of thedifferential equation +120585(120590) = 0 converges to 0 in finite timeChoosing 120585(120590) = 120573|120590|12 sign(120590) yields the controller
119906 (119905) = minus120572 sign ( + 120573 |120590|12 sign (120590)) (36)
6 Mathematical Problems in Engineering
0 50 100 150minus6
minus4
minus2
0
2
Time (s)
e
e(SMC)
0 50 100 150minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
0
2
Time (s)
ede
e(TA)de(TA)
0 50 100 150
0
2
Time (s)
e
STC
0 50 100 150
0
2
Time (s)
e
e(QCC)de(QCC)
0 50 100 150
0
2
Time (s)
ede
PLC
Figure 4 Error and its derivative for the different controllers
A sufficient condition for convergence is given as
120572119870119898minus 119862 gt
1205732
2 (37)
5 Simulation Results and Discussion
The characteristics of dynamic model of the coupled tankssystem are presented in Table 1 [8] The control input isrestricted to be between 119906min = 0 and 119906max = 50 [cm
3s] Thecomputer simulations are performed using a time interval
of [0 150] s The parameters of the controller are optimizedusing a step input with a final value of 6 cm for the waterlevel For the other tested water levels no more adjustment ofthe controllers parameters is performed Through extensivesimulation runs the optimum controllersrsquo parameters forthe different controllers tested in this study are reported inTable 2
Figure 3 shows the regulation performance for the testedcontrollers for a desired level of 6 cm Based on the figureit can be concluded that the controllers regulate the water
Mathematical Problems in Engineering 7
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
SMC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
TC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
STC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
QCC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
PCL
Figure 5 The control signals of the designed controllers
Table 1 Characteristic of the coupled tanks system
Gravitational rate 119892 981 cms2
Cross-sectional area of both tanks 2082 cm2
Area of the connecting pipe 1198861
058 cm2
Area of the outlet 1198862
024 cm2
level successfully with approximately the same performanceNote that the controllers are able to regulate any desiredwaterlevels without adjustments of any parameter
The behaviors of sliding surfaceserror are represented inFigure 4 for the desired level of 6 cm Based on the figureit can be seen that in all cases the controllers show typicalsliding mode behavior that is the error reaches 0 in finite
Table 2 Controllers parameters
Controller SMC TC STC QCC PCLParameters 120582 119896 119903
11199032
120572 120582 120572 120573 120572 120573
Value 067 90 500 100 220 14 65 2 100 1
time and stays 0 afterwards The derivative of error withrespect to time is also shown for the TA QCC and PLCcontrollers The error derivative also converges to zero Notethat in the case of the 1-SMC and STC the error derivatives arenot shown because the error derivatives do not play a majorrole in the design of the controller
Figure 5 shows the control signal of the five controllersThe controllers have the same control signal until they reach
8 Mathematical Problems in Engineering
Table 3 Time domain performancemeasures for different119867 values
119867 (cm) Controller 119879119903(s) 119879
119904(s) Os () IAE
300
SMC 29975 36626 1776 52459TA 30010 51783 7506 54823STC 30017 52124 7769 56214QCC 30010 51250 7085 54580PCL 30010 51576 7344 54704
600
SMC 69308 84162 0097 234125TA 69335 95179 2522 236066STC 69330 95560 2621 236735QCC 69335 94630 2393 235909PCL 69335 94975 2473 235973
800
SMC 101366 123310 0033 445981TA 101384 123330 1392 447400STC 101378 123315 1457 447537QCC 101384 123330 1327 447329PCL 101384 123330 1367 447357
the sliding surface The difference between the signals of the2-SM controllers is the increase of the on-off control in theorder STC and TA for the QCC and PCL respectively
To compare the performance of the controllers the timedomain performance measures such as the settling time therise time the percentage overshoot and the integral absoluteerror (IAE) are used The settling time is defined as the timerequired for the response to settle within 1of the steady statevalue The rise time is defined as the time required for theoutput to change from 10 to 90 of its final value The IAEis given by the following equation
IAE = int119905
0
|120590| 119889119905 (38)
The performancemeasures have been computed for threedifferent specified levels of 3 6 and 8 cm as listed in Table 3It can be seen from the table that all the used controllers haveapproximately the same rise time in all the cases The QCCcontroller has a slightly less settling overshoot and IAE
The results of the tracking test of the five controllersusing a square signal reference input are shown in Figure 6Based on the figure it can be observed that the trackingperformance for the all the controller is good In terms of theIAE the values obtained are listed in Table 4 From the valuesgiven in the Table 4 it can be seen that the smallest IAE isfor the 1-SM controller the 2-SMC have approximately thesame IAE From the comparison it can be reported that the1-SM controller slightly outperforms the 2-SM controller inall aspects but the controller requires more information thanthe 2-SM controllers as can be observed from Section 4
6 Conclusions
In this paper four second order sliding mode controllersnamely the twisting the super twisting the quasi-con-
0
2
4
6
8
Leve
l (cm
)
Ref
Ref
SMC
0
2
4
6
8
Leve
l (cm
)
TA
Ref
0
2
4
6
8
Leve
l (cm
)
STC
Ref
0
2
4
6
8
Leve
l (cm
)
QCC
Ref
0
2
4
6
8
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
Leve
l (cm
)
PLC
Figure 6 Level tracking test for the different controllers
Mathematical Problems in Engineering 9
Table 4 IAE for the different controllers from the tracking test
Controller SMC TA STC QCC PCLIAE 24232 24800 24751 24689 24842
tinuous and the prescribed convergence law controller havebeen successfully designed to regulate the water level in thesecond tank of a coupled tanks system The efficacy andusability of the proposed controllers are verified throughcomputer simulation tests Comparison between the con-trollers is based on the time domain performance measuresResults showed that all the controllers are able to regulate thewater level without major differences in their performanceComparison of the 2-SM controllers against 1-SM controllershowed that less information is required in the case of the 2-SM controller than the 1-SMC
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This project was financially supported by King Saud Univer-sity Vice Deanship of Research Chairs
References
[1] S K Singh N Katal and S G Modani ldquoMulti-objectiveoptimization of PID controller for coupled-tank liquid-levelcontrol system using genetic algorithmrdquo in Proceedings of theSecond International Conference on Soft Computing for ProblemSolving (SocProS 2012) December 28ndash30 2012 vol 236 ofAdvances in Intelligent Systems and Computing pp 59ndash66Springer New Delhi India 2014
[2] J-X Xu C-C Hang and C Liu ldquoParallel structure and tuningof a fuzzy PID controllerrdquo Automatica vol 36 no 5 pp 673ndash684 2000
[3] N K Poulsen B Kouvaritakis and M Cannon ldquoNonlinearconstrained predictive control applied to a coupled-tanks appa-ratusrdquo IEE Proceedings Control Theory and Applications vol148 no 1 pp 17ndash24 2001
[4] AKumarMVashishth and L Rai ldquoLiquid level control of cou-pled tank system using fractional PID controllerrdquo InternationalJournal of Emerging Trends in Electrical and Electronics vol 3no 1 2013
[5] V Utkin J Guldner and M Shijun Sliding Mode Control inElectro-Mechanical Systems vol 34 CRC Press 1999
[6] C Edwards and S Spurgeon Sliding Mode Control Theory andApplications CRC Press 1998
[7] K D Young V I Utkin and U Ozguner ldquoA control engineerrsquosguide to sliding mode controlrdquo IEEE Transactions on ControlSystems Technology vol 7 no 3 pp 328ndash342 1999
[8] N B Almutairi and M Zribi ldquoSliding mode control of coupledtanksrdquoMechatronics vol 16 no 7 pp 427ndash441 2006
[9] S Aydin and S Tokat ldquoSliding mode control of a coupledtank system with a state varying sliding surface parameterrdquo
in Proceedings of the IEEE International Workshop on VariableStructure Systems (VSS rsquo08) pp 355ndash360 IEEE Antalya TurkeyJune 2008
[10] A Boubakir F Boudjema and S Labiod ldquoA neuro-fuzzy-sliding mode controller using nonlinear sliding surface appliedto the coupled tanks systemrdquo International Journal of Automa-tion and Computing vol 6 no 1 pp 72ndash80 2009
[11] M K Khan and S K Spurgeon ldquoRobust MIMO water levelcontrol in interconnected twin-tanks using second order slidingmode controlrdquo Control Engineering Practice vol 14 no 4 pp375ndash386 2006
[12] C Pukdeboon ldquoSecond-order sliding mode controllers forspacecraft relative translationrdquo Applied Mathematical Sciencesvol 6 no 100 pp 4965ndash4979 2012
[13] I Eker ldquoSecond-order sliding mode control with experimentalapplicationrdquo ISA Transactions vol 49 no 3 pp 394ndash405 2010
[14] S Mondal and C Mahanta ldquoComposite nonlinear feedbackbased discrete integral sliding mode controller for uncertainsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 17 no 3 pp 1320ndash1331 2012
[15] S Mondal and C Mahanta ldquoNonlinear sliding surface basedsecond order sliding mode controller for uncertain linearsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 9 pp 3760ndash3769 2011
[16] S Mondal and CMahanta ldquoA fast converging robust controllerusing adaptive second order sliding moderdquo ISA Transactionsvol 51 no 6 pp 713ndash721 2012
[17] M Defoort T Floquet A Kokosy andW Perruquetti ldquoA novelhigher order sliding mode control schemerdquo Systems amp ControlLetters vol 58 no 2 pp 102ndash108 2009
[18] A Levant ldquoHigher-order sliding modes differentiation andoutput-feedback controlrdquo International Journal of Control vol76 no 9-10 pp 924ndash941 2003
[19] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Birkhauser 1st edition 2014
[20] M K Khan S K Spurgeon and A Levant ldquoSimple outputfeedback 2-sliding controller for systems of relative degree twordquoin Proceedings of the European Control Conference (ECC rsquo03)vol 3 September 2003
[21] A Levant ldquoQuasi-continuous high-order sliding-mode con-trollersrdquo IEEE Transactions on Automatic Control vol 50 no11 pp 1812ndash1816 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
r(t)
+minus
120590(t)
Diff
HOSMCu(t)
System
y(t)
Figure 2 Block diagram of a black box controller
The required derivative can be obtained by usingHOSMCarbitrary order differentiator [19]The real time differentiatorhas the general form as in the following set of equations In(24) 119891(119905) represents signal to be differentiated 119896 minus 1 timesConsider
0= V0
1= V1V0
= minus1205821198961198711(119896+1) 10038161003816100381610038161199110 minus 119891 (119905)
1003816100381610038161003816119896(119896+1) sign (119911
0minus 119891 (119905))
+ 1199111
V1= minus120582119896minus11198711119896 10038161003816100381610038161199111 minus V0
1003816100381610038161003816(119896minus1)119896 sign (119911
1minus V0) + 1199112
119896minus1= V119896minus1
= minus120582111987112 1003816100381610038161003816119911119896minus1 minus V119896minus2
1003816100381610038161003816119896(119896+1) sign (119911
119896minus1minus V119896minus2)
+ 119911119896
119896= 1205820119871 sign (119911
119896minus V119896minus1)
(23)
A first order differentiator can be obtained by setting 119896 = 1and has the following form
0= minus1205821
10038161003816100381610038161199110 minus 119891 (119905)100381610038161003816100381612 sign (119911
0minus 119891 (119905)) + 119911
1
1= minus1205820sign (119911
0minus 119891 (119905))
(24)
where 1199110and 119911
1are the estimation of 119891(119905) and 119891(119905)
respectively The parameters 1205821= 15119871
12 1205820= 11119871 and
119871 are a positive constant to be selected via simulation asrecommended in [19]
4 Controllers Design
41 1-SM The procedure described in Section 31 will beapplied to regulate the output ℎ
2to a desired value119867 for the
coupled tanks system The sliding surface 120590 is selected as
120590 = 1+ 120582 (119909
1minus 119867) (25)
By taking the time derivative of (25) (26) is obtained asfollows
= 1+ 1205821 (26)
Substituting (10) and (11) in (26) yields
= 119891 (119909) + 119887 (119909) + 120582 (minus1198961radicℎ1+ 1198962radicℎ1minus ℎ2) (27)
On putting = 0 and solving for
=1
119887 (119909)[minus119891 (119909) minus 120582 (minus119896
1radicℎ1+ 1198962radicℎ1minus ℎ2)] (28)
Finally using (18) the control law for ℎ2is computed as
119906 =1
119887 (119909)[minus119891 (119909) minus 120582 (minus119896
1radicℎ1+ 1198962radicℎ1minus ℎ2)]
minus 119896 sign (120590) (29)
42 Twisting Controller Historically the first proposed 2-SMcontroller was the twisting controller It is defined by thefollowing formula
119906 (119905) = minus (1199031sign (120590) + 119903
2sign ()) (30)
This controller guarantees the appearance of a 2-slidingmode 120590 = = 0 attracting the trajectories of the slidingvariable dynamics in finite time if 119903
1and 119903
2satisfy the
following conditions
1199031gt 1199032gt 0
(1199031+ 1199032)119870119898minus 119862 gt (119903
1minus 1199032)119870119872
(1199031minus 1199032)119870119898gt 0
(31)
43 Super Twisting Controller The STC has the advantageover another algorithm in that it does not require the timederivatives of the sliding variables The algorithm has beendeveloped for the case of a system with relative degree one inorder to avoid chattering and its trajectories on the slidingplane are characterized by twisting around the origin Themerits of the STC are rejection of smooth disturbances ofarbitrary shape tracking of smooth references of arbitraryshape and the finite-time convergence to the set point A STCfor system which has relative degree of two was proposedin [20] The control law 119906(119905) consists of two terms The firstterm is its discontinuous time derivative and the second is acontinuous function of the available sliding variable as givenbelow
119906 (119905) = minus120582 |120590|12 sign (120590) + 119906
1
1=
minus119896119906 |119906| gt 119880119872
minus120572 sign (120590) |119906| le 119880119872
(32)
As stated in [19] for 119870119898gt 119862 and a sufficiently large 120572 the
controller guarantees the appearance of a 2-SMC in systemgiven in (23) which attracts the trajectories in finite time tozero A sufficient condition for finite time convergence is asfollows [19]
120582 gt radic2
(119870119898120572 minus 119862)
(119870119898120572 + 119862)119870
119872(1 + 119902)
1198702119898(1 minus 119902)
(33)
Mathematical Problems in Engineering 5
100 150
0
2
4
6
8
00 50 100 1500 50
100 1500 50 100 1500 50
2
4
6
8
0
2
4
6
8
0
2
4
6
8
Time (s)
Time (s)
Time (s)Time (s)
Time (s)
QCC
0 50 100 1500
2
4
6
8
PLC
Leve
l (cm
)
Leve
l (cm
)Le
vel (
cm)
Leve
l (cm
)
Leve
l (cm
)
SMC TA
STC
Figure 3 Level tracking test for the different controllers
44 Quasi-Continuous Controller (QCC) The homogeneousquasi-continuous (QCC) controller [21] requires the firstorder derivative of the sliding surface 120590 With the use ofdifferentiator in (25) the second order quasi-continuoussliding mode controller can be written as
119906 (119905) = minus1205721199111+ 120573 |120590|
12 sign (120590)100381610038161003816100381611991111003816100381610038161003816 + 120573 |120590|
12 (34)
The parameters 120572 and 120573 in (35) are positive constant to beselected via computer simulation
45 Prescribed Convergence Law Controller The controllerwith prescribed convergence law [19] is defined as
119906 (119905) = minus120572 sign ( + 120585 (120590)) (35)
where 120585(120590) is a continuous function smooth everywhereexcept at 120590 = 0 It is assumed that the solution of thedifferential equation +120585(120590) = 0 converges to 0 in finite timeChoosing 120585(120590) = 120573|120590|12 sign(120590) yields the controller
119906 (119905) = minus120572 sign ( + 120573 |120590|12 sign (120590)) (36)
6 Mathematical Problems in Engineering
0 50 100 150minus6
minus4
minus2
0
2
Time (s)
e
e(SMC)
0 50 100 150minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
0
2
Time (s)
ede
e(TA)de(TA)
0 50 100 150
0
2
Time (s)
e
STC
0 50 100 150
0
2
Time (s)
e
e(QCC)de(QCC)
0 50 100 150
0
2
Time (s)
ede
PLC
Figure 4 Error and its derivative for the different controllers
A sufficient condition for convergence is given as
120572119870119898minus 119862 gt
1205732
2 (37)
5 Simulation Results and Discussion
The characteristics of dynamic model of the coupled tankssystem are presented in Table 1 [8] The control input isrestricted to be between 119906min = 0 and 119906max = 50 [cm
3s] Thecomputer simulations are performed using a time interval
of [0 150] s The parameters of the controller are optimizedusing a step input with a final value of 6 cm for the waterlevel For the other tested water levels no more adjustment ofthe controllers parameters is performed Through extensivesimulation runs the optimum controllersrsquo parameters forthe different controllers tested in this study are reported inTable 2
Figure 3 shows the regulation performance for the testedcontrollers for a desired level of 6 cm Based on the figureit can be concluded that the controllers regulate the water
Mathematical Problems in Engineering 7
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
SMC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
TC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
STC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
QCC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
PCL
Figure 5 The control signals of the designed controllers
Table 1 Characteristic of the coupled tanks system
Gravitational rate 119892 981 cms2
Cross-sectional area of both tanks 2082 cm2
Area of the connecting pipe 1198861
058 cm2
Area of the outlet 1198862
024 cm2
level successfully with approximately the same performanceNote that the controllers are able to regulate any desiredwaterlevels without adjustments of any parameter
The behaviors of sliding surfaceserror are represented inFigure 4 for the desired level of 6 cm Based on the figureit can be seen that in all cases the controllers show typicalsliding mode behavior that is the error reaches 0 in finite
Table 2 Controllers parameters
Controller SMC TC STC QCC PCLParameters 120582 119896 119903
11199032
120572 120582 120572 120573 120572 120573
Value 067 90 500 100 220 14 65 2 100 1
time and stays 0 afterwards The derivative of error withrespect to time is also shown for the TA QCC and PLCcontrollers The error derivative also converges to zero Notethat in the case of the 1-SMC and STC the error derivatives arenot shown because the error derivatives do not play a majorrole in the design of the controller
Figure 5 shows the control signal of the five controllersThe controllers have the same control signal until they reach
8 Mathematical Problems in Engineering
Table 3 Time domain performancemeasures for different119867 values
119867 (cm) Controller 119879119903(s) 119879
119904(s) Os () IAE
300
SMC 29975 36626 1776 52459TA 30010 51783 7506 54823STC 30017 52124 7769 56214QCC 30010 51250 7085 54580PCL 30010 51576 7344 54704
600
SMC 69308 84162 0097 234125TA 69335 95179 2522 236066STC 69330 95560 2621 236735QCC 69335 94630 2393 235909PCL 69335 94975 2473 235973
800
SMC 101366 123310 0033 445981TA 101384 123330 1392 447400STC 101378 123315 1457 447537QCC 101384 123330 1327 447329PCL 101384 123330 1367 447357
the sliding surface The difference between the signals of the2-SM controllers is the increase of the on-off control in theorder STC and TA for the QCC and PCL respectively
To compare the performance of the controllers the timedomain performance measures such as the settling time therise time the percentage overshoot and the integral absoluteerror (IAE) are used The settling time is defined as the timerequired for the response to settle within 1of the steady statevalue The rise time is defined as the time required for theoutput to change from 10 to 90 of its final value The IAEis given by the following equation
IAE = int119905
0
|120590| 119889119905 (38)
The performancemeasures have been computed for threedifferent specified levels of 3 6 and 8 cm as listed in Table 3It can be seen from the table that all the used controllers haveapproximately the same rise time in all the cases The QCCcontroller has a slightly less settling overshoot and IAE
The results of the tracking test of the five controllersusing a square signal reference input are shown in Figure 6Based on the figure it can be observed that the trackingperformance for the all the controller is good In terms of theIAE the values obtained are listed in Table 4 From the valuesgiven in the Table 4 it can be seen that the smallest IAE isfor the 1-SM controller the 2-SMC have approximately thesame IAE From the comparison it can be reported that the1-SM controller slightly outperforms the 2-SM controller inall aspects but the controller requires more information thanthe 2-SM controllers as can be observed from Section 4
6 Conclusions
In this paper four second order sliding mode controllersnamely the twisting the super twisting the quasi-con-
0
2
4
6
8
Leve
l (cm
)
Ref
Ref
SMC
0
2
4
6
8
Leve
l (cm
)
TA
Ref
0
2
4
6
8
Leve
l (cm
)
STC
Ref
0
2
4
6
8
Leve
l (cm
)
QCC
Ref
0
2
4
6
8
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
Leve
l (cm
)
PLC
Figure 6 Level tracking test for the different controllers
Mathematical Problems in Engineering 9
Table 4 IAE for the different controllers from the tracking test
Controller SMC TA STC QCC PCLIAE 24232 24800 24751 24689 24842
tinuous and the prescribed convergence law controller havebeen successfully designed to regulate the water level in thesecond tank of a coupled tanks system The efficacy andusability of the proposed controllers are verified throughcomputer simulation tests Comparison between the con-trollers is based on the time domain performance measuresResults showed that all the controllers are able to regulate thewater level without major differences in their performanceComparison of the 2-SM controllers against 1-SM controllershowed that less information is required in the case of the 2-SM controller than the 1-SMC
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This project was financially supported by King Saud Univer-sity Vice Deanship of Research Chairs
References
[1] S K Singh N Katal and S G Modani ldquoMulti-objectiveoptimization of PID controller for coupled-tank liquid-levelcontrol system using genetic algorithmrdquo in Proceedings of theSecond International Conference on Soft Computing for ProblemSolving (SocProS 2012) December 28ndash30 2012 vol 236 ofAdvances in Intelligent Systems and Computing pp 59ndash66Springer New Delhi India 2014
[2] J-X Xu C-C Hang and C Liu ldquoParallel structure and tuningof a fuzzy PID controllerrdquo Automatica vol 36 no 5 pp 673ndash684 2000
[3] N K Poulsen B Kouvaritakis and M Cannon ldquoNonlinearconstrained predictive control applied to a coupled-tanks appa-ratusrdquo IEE Proceedings Control Theory and Applications vol148 no 1 pp 17ndash24 2001
[4] AKumarMVashishth and L Rai ldquoLiquid level control of cou-pled tank system using fractional PID controllerrdquo InternationalJournal of Emerging Trends in Electrical and Electronics vol 3no 1 2013
[5] V Utkin J Guldner and M Shijun Sliding Mode Control inElectro-Mechanical Systems vol 34 CRC Press 1999
[6] C Edwards and S Spurgeon Sliding Mode Control Theory andApplications CRC Press 1998
[7] K D Young V I Utkin and U Ozguner ldquoA control engineerrsquosguide to sliding mode controlrdquo IEEE Transactions on ControlSystems Technology vol 7 no 3 pp 328ndash342 1999
[8] N B Almutairi and M Zribi ldquoSliding mode control of coupledtanksrdquoMechatronics vol 16 no 7 pp 427ndash441 2006
[9] S Aydin and S Tokat ldquoSliding mode control of a coupledtank system with a state varying sliding surface parameterrdquo
in Proceedings of the IEEE International Workshop on VariableStructure Systems (VSS rsquo08) pp 355ndash360 IEEE Antalya TurkeyJune 2008
[10] A Boubakir F Boudjema and S Labiod ldquoA neuro-fuzzy-sliding mode controller using nonlinear sliding surface appliedto the coupled tanks systemrdquo International Journal of Automa-tion and Computing vol 6 no 1 pp 72ndash80 2009
[11] M K Khan and S K Spurgeon ldquoRobust MIMO water levelcontrol in interconnected twin-tanks using second order slidingmode controlrdquo Control Engineering Practice vol 14 no 4 pp375ndash386 2006
[12] C Pukdeboon ldquoSecond-order sliding mode controllers forspacecraft relative translationrdquo Applied Mathematical Sciencesvol 6 no 100 pp 4965ndash4979 2012
[13] I Eker ldquoSecond-order sliding mode control with experimentalapplicationrdquo ISA Transactions vol 49 no 3 pp 394ndash405 2010
[14] S Mondal and C Mahanta ldquoComposite nonlinear feedbackbased discrete integral sliding mode controller for uncertainsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 17 no 3 pp 1320ndash1331 2012
[15] S Mondal and C Mahanta ldquoNonlinear sliding surface basedsecond order sliding mode controller for uncertain linearsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 9 pp 3760ndash3769 2011
[16] S Mondal and CMahanta ldquoA fast converging robust controllerusing adaptive second order sliding moderdquo ISA Transactionsvol 51 no 6 pp 713ndash721 2012
[17] M Defoort T Floquet A Kokosy andW Perruquetti ldquoA novelhigher order sliding mode control schemerdquo Systems amp ControlLetters vol 58 no 2 pp 102ndash108 2009
[18] A Levant ldquoHigher-order sliding modes differentiation andoutput-feedback controlrdquo International Journal of Control vol76 no 9-10 pp 924ndash941 2003
[19] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Birkhauser 1st edition 2014
[20] M K Khan S K Spurgeon and A Levant ldquoSimple outputfeedback 2-sliding controller for systems of relative degree twordquoin Proceedings of the European Control Conference (ECC rsquo03)vol 3 September 2003
[21] A Levant ldquoQuasi-continuous high-order sliding-mode con-trollersrdquo IEEE Transactions on Automatic Control vol 50 no11 pp 1812ndash1816 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
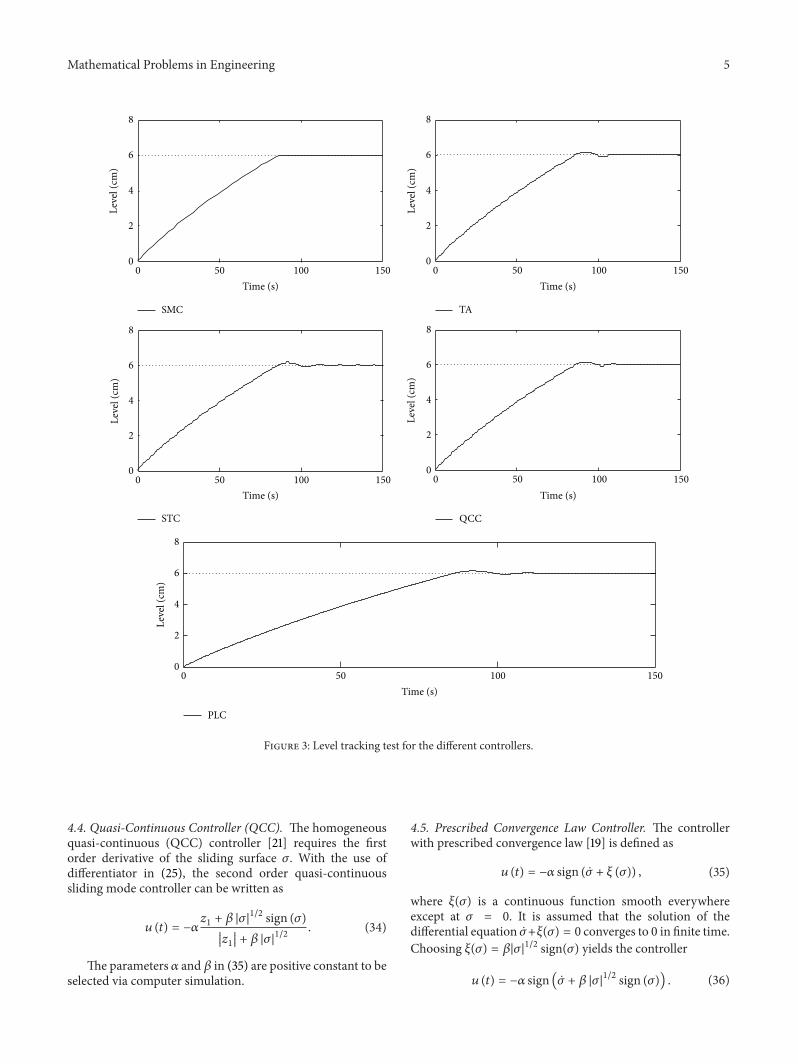
Mathematical Problems in Engineering 5
100 150
0
2
4
6
8
00 50 100 1500 50
100 1500 50 100 1500 50
2
4
6
8
0
2
4
6
8
0
2
4
6
8
Time (s)
Time (s)
Time (s)Time (s)
Time (s)
QCC
0 50 100 1500
2
4
6
8
PLC
Leve
l (cm
)
Leve
l (cm
)Le
vel (
cm)
Leve
l (cm
)
Leve
l (cm
)
SMC TA
STC
Figure 3 Level tracking test for the different controllers
44 Quasi-Continuous Controller (QCC) The homogeneousquasi-continuous (QCC) controller [21] requires the firstorder derivative of the sliding surface 120590 With the use ofdifferentiator in (25) the second order quasi-continuoussliding mode controller can be written as
119906 (119905) = minus1205721199111+ 120573 |120590|
12 sign (120590)100381610038161003816100381611991111003816100381610038161003816 + 120573 |120590|
12 (34)
The parameters 120572 and 120573 in (35) are positive constant to beselected via computer simulation
45 Prescribed Convergence Law Controller The controllerwith prescribed convergence law [19] is defined as
119906 (119905) = minus120572 sign ( + 120585 (120590)) (35)
where 120585(120590) is a continuous function smooth everywhereexcept at 120590 = 0 It is assumed that the solution of thedifferential equation +120585(120590) = 0 converges to 0 in finite timeChoosing 120585(120590) = 120573|120590|12 sign(120590) yields the controller
119906 (119905) = minus120572 sign ( + 120573 |120590|12 sign (120590)) (36)
6 Mathematical Problems in Engineering
0 50 100 150minus6
minus4
minus2
0
2
Time (s)
e
e(SMC)
0 50 100 150minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
0
2
Time (s)
ede
e(TA)de(TA)
0 50 100 150
0
2
Time (s)
e
STC
0 50 100 150
0
2
Time (s)
e
e(QCC)de(QCC)
0 50 100 150
0
2
Time (s)
ede
PLC
Figure 4 Error and its derivative for the different controllers
A sufficient condition for convergence is given as
120572119870119898minus 119862 gt
1205732
2 (37)
5 Simulation Results and Discussion
The characteristics of dynamic model of the coupled tankssystem are presented in Table 1 [8] The control input isrestricted to be between 119906min = 0 and 119906max = 50 [cm
3s] Thecomputer simulations are performed using a time interval
of [0 150] s The parameters of the controller are optimizedusing a step input with a final value of 6 cm for the waterlevel For the other tested water levels no more adjustment ofthe controllers parameters is performed Through extensivesimulation runs the optimum controllersrsquo parameters forthe different controllers tested in this study are reported inTable 2
Figure 3 shows the regulation performance for the testedcontrollers for a desired level of 6 cm Based on the figureit can be concluded that the controllers regulate the water
Mathematical Problems in Engineering 7
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
SMC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
TC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
STC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
QCC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
PCL
Figure 5 The control signals of the designed controllers
Table 1 Characteristic of the coupled tanks system
Gravitational rate 119892 981 cms2
Cross-sectional area of both tanks 2082 cm2
Area of the connecting pipe 1198861
058 cm2
Area of the outlet 1198862
024 cm2
level successfully with approximately the same performanceNote that the controllers are able to regulate any desiredwaterlevels without adjustments of any parameter
The behaviors of sliding surfaceserror are represented inFigure 4 for the desired level of 6 cm Based on the figureit can be seen that in all cases the controllers show typicalsliding mode behavior that is the error reaches 0 in finite
Table 2 Controllers parameters
Controller SMC TC STC QCC PCLParameters 120582 119896 119903
11199032
120572 120582 120572 120573 120572 120573
Value 067 90 500 100 220 14 65 2 100 1
time and stays 0 afterwards The derivative of error withrespect to time is also shown for the TA QCC and PLCcontrollers The error derivative also converges to zero Notethat in the case of the 1-SMC and STC the error derivatives arenot shown because the error derivatives do not play a majorrole in the design of the controller
Figure 5 shows the control signal of the five controllersThe controllers have the same control signal until they reach
8 Mathematical Problems in Engineering
Table 3 Time domain performancemeasures for different119867 values
119867 (cm) Controller 119879119903(s) 119879
119904(s) Os () IAE
300
SMC 29975 36626 1776 52459TA 30010 51783 7506 54823STC 30017 52124 7769 56214QCC 30010 51250 7085 54580PCL 30010 51576 7344 54704
600
SMC 69308 84162 0097 234125TA 69335 95179 2522 236066STC 69330 95560 2621 236735QCC 69335 94630 2393 235909PCL 69335 94975 2473 235973
800
SMC 101366 123310 0033 445981TA 101384 123330 1392 447400STC 101378 123315 1457 447537QCC 101384 123330 1327 447329PCL 101384 123330 1367 447357
the sliding surface The difference between the signals of the2-SM controllers is the increase of the on-off control in theorder STC and TA for the QCC and PCL respectively
To compare the performance of the controllers the timedomain performance measures such as the settling time therise time the percentage overshoot and the integral absoluteerror (IAE) are used The settling time is defined as the timerequired for the response to settle within 1of the steady statevalue The rise time is defined as the time required for theoutput to change from 10 to 90 of its final value The IAEis given by the following equation
IAE = int119905
0
|120590| 119889119905 (38)
The performancemeasures have been computed for threedifferent specified levels of 3 6 and 8 cm as listed in Table 3It can be seen from the table that all the used controllers haveapproximately the same rise time in all the cases The QCCcontroller has a slightly less settling overshoot and IAE
The results of the tracking test of the five controllersusing a square signal reference input are shown in Figure 6Based on the figure it can be observed that the trackingperformance for the all the controller is good In terms of theIAE the values obtained are listed in Table 4 From the valuesgiven in the Table 4 it can be seen that the smallest IAE isfor the 1-SM controller the 2-SMC have approximately thesame IAE From the comparison it can be reported that the1-SM controller slightly outperforms the 2-SM controller inall aspects but the controller requires more information thanthe 2-SM controllers as can be observed from Section 4
6 Conclusions
In this paper four second order sliding mode controllersnamely the twisting the super twisting the quasi-con-
0
2
4
6
8
Leve
l (cm
)
Ref
Ref
SMC
0
2
4
6
8
Leve
l (cm
)
TA
Ref
0
2
4
6
8
Leve
l (cm
)
STC
Ref
0
2
4
6
8
Leve
l (cm
)
QCC
Ref
0
2
4
6
8
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
Leve
l (cm
)
PLC
Figure 6 Level tracking test for the different controllers
Mathematical Problems in Engineering 9
Table 4 IAE for the different controllers from the tracking test
Controller SMC TA STC QCC PCLIAE 24232 24800 24751 24689 24842
tinuous and the prescribed convergence law controller havebeen successfully designed to regulate the water level in thesecond tank of a coupled tanks system The efficacy andusability of the proposed controllers are verified throughcomputer simulation tests Comparison between the con-trollers is based on the time domain performance measuresResults showed that all the controllers are able to regulate thewater level without major differences in their performanceComparison of the 2-SM controllers against 1-SM controllershowed that less information is required in the case of the 2-SM controller than the 1-SMC
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This project was financially supported by King Saud Univer-sity Vice Deanship of Research Chairs
References
[1] S K Singh N Katal and S G Modani ldquoMulti-objectiveoptimization of PID controller for coupled-tank liquid-levelcontrol system using genetic algorithmrdquo in Proceedings of theSecond International Conference on Soft Computing for ProblemSolving (SocProS 2012) December 28ndash30 2012 vol 236 ofAdvances in Intelligent Systems and Computing pp 59ndash66Springer New Delhi India 2014
[2] J-X Xu C-C Hang and C Liu ldquoParallel structure and tuningof a fuzzy PID controllerrdquo Automatica vol 36 no 5 pp 673ndash684 2000
[3] N K Poulsen B Kouvaritakis and M Cannon ldquoNonlinearconstrained predictive control applied to a coupled-tanks appa-ratusrdquo IEE Proceedings Control Theory and Applications vol148 no 1 pp 17ndash24 2001
[4] AKumarMVashishth and L Rai ldquoLiquid level control of cou-pled tank system using fractional PID controllerrdquo InternationalJournal of Emerging Trends in Electrical and Electronics vol 3no 1 2013
[5] V Utkin J Guldner and M Shijun Sliding Mode Control inElectro-Mechanical Systems vol 34 CRC Press 1999
[6] C Edwards and S Spurgeon Sliding Mode Control Theory andApplications CRC Press 1998
[7] K D Young V I Utkin and U Ozguner ldquoA control engineerrsquosguide to sliding mode controlrdquo IEEE Transactions on ControlSystems Technology vol 7 no 3 pp 328ndash342 1999
[8] N B Almutairi and M Zribi ldquoSliding mode control of coupledtanksrdquoMechatronics vol 16 no 7 pp 427ndash441 2006
[9] S Aydin and S Tokat ldquoSliding mode control of a coupledtank system with a state varying sliding surface parameterrdquo
in Proceedings of the IEEE International Workshop on VariableStructure Systems (VSS rsquo08) pp 355ndash360 IEEE Antalya TurkeyJune 2008
[10] A Boubakir F Boudjema and S Labiod ldquoA neuro-fuzzy-sliding mode controller using nonlinear sliding surface appliedto the coupled tanks systemrdquo International Journal of Automa-tion and Computing vol 6 no 1 pp 72ndash80 2009
[11] M K Khan and S K Spurgeon ldquoRobust MIMO water levelcontrol in interconnected twin-tanks using second order slidingmode controlrdquo Control Engineering Practice vol 14 no 4 pp375ndash386 2006
[12] C Pukdeboon ldquoSecond-order sliding mode controllers forspacecraft relative translationrdquo Applied Mathematical Sciencesvol 6 no 100 pp 4965ndash4979 2012
[13] I Eker ldquoSecond-order sliding mode control with experimentalapplicationrdquo ISA Transactions vol 49 no 3 pp 394ndash405 2010
[14] S Mondal and C Mahanta ldquoComposite nonlinear feedbackbased discrete integral sliding mode controller for uncertainsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 17 no 3 pp 1320ndash1331 2012
[15] S Mondal and C Mahanta ldquoNonlinear sliding surface basedsecond order sliding mode controller for uncertain linearsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 9 pp 3760ndash3769 2011
[16] S Mondal and CMahanta ldquoA fast converging robust controllerusing adaptive second order sliding moderdquo ISA Transactionsvol 51 no 6 pp 713ndash721 2012
[17] M Defoort T Floquet A Kokosy andW Perruquetti ldquoA novelhigher order sliding mode control schemerdquo Systems amp ControlLetters vol 58 no 2 pp 102ndash108 2009
[18] A Levant ldquoHigher-order sliding modes differentiation andoutput-feedback controlrdquo International Journal of Control vol76 no 9-10 pp 924ndash941 2003
[19] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Birkhauser 1st edition 2014
[20] M K Khan S K Spurgeon and A Levant ldquoSimple outputfeedback 2-sliding controller for systems of relative degree twordquoin Proceedings of the European Control Conference (ECC rsquo03)vol 3 September 2003
[21] A Levant ldquoQuasi-continuous high-order sliding-mode con-trollersrdquo IEEE Transactions on Automatic Control vol 50 no11 pp 1812ndash1816 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
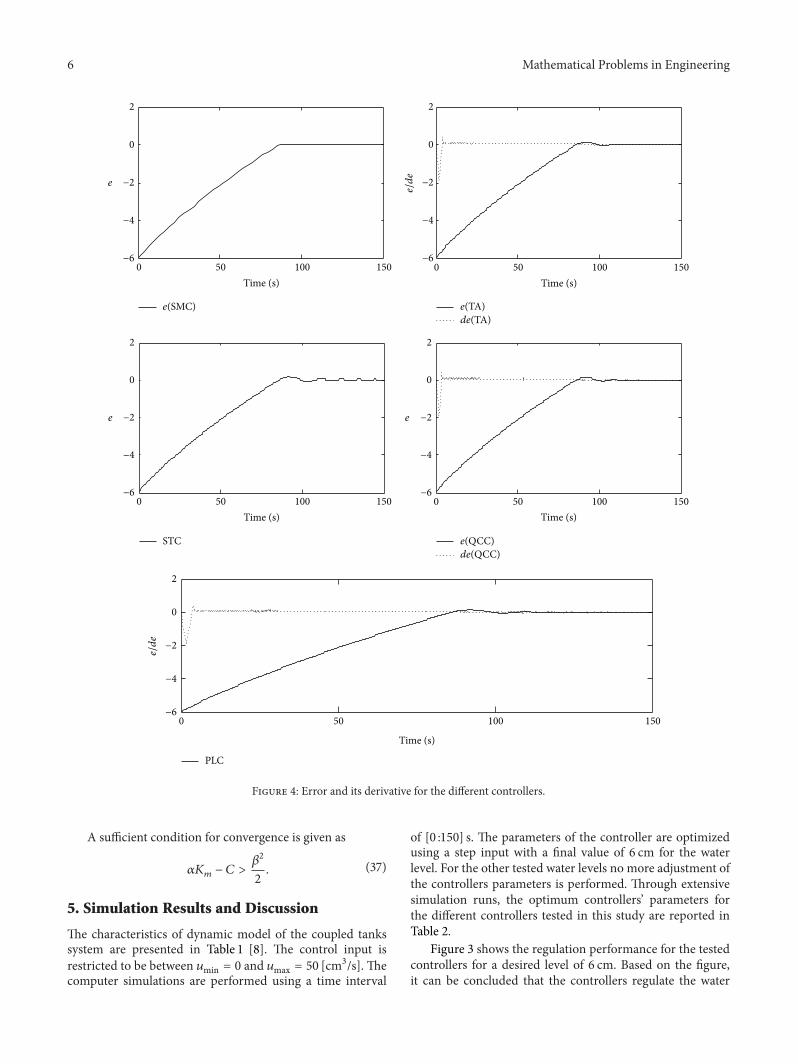
6 Mathematical Problems in Engineering
0 50 100 150minus6
minus4
minus2
0
2
Time (s)
e
e(SMC)
0 50 100 150minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
minus6
minus4
minus2
0
2
Time (s)
ede
e(TA)de(TA)
0 50 100 150
0
2
Time (s)
e
STC
0 50 100 150
0
2
Time (s)
e
e(QCC)de(QCC)
0 50 100 150
0
2
Time (s)
ede
PLC
Figure 4 Error and its derivative for the different controllers
A sufficient condition for convergence is given as
120572119870119898minus 119862 gt
1205732
2 (37)
5 Simulation Results and Discussion
The characteristics of dynamic model of the coupled tankssystem are presented in Table 1 [8] The control input isrestricted to be between 119906min = 0 and 119906max = 50 [cm
3s] Thecomputer simulations are performed using a time interval
of [0 150] s The parameters of the controller are optimizedusing a step input with a final value of 6 cm for the waterlevel For the other tested water levels no more adjustment ofthe controllers parameters is performed Through extensivesimulation runs the optimum controllersrsquo parameters forthe different controllers tested in this study are reported inTable 2
Figure 3 shows the regulation performance for the testedcontrollers for a desired level of 6 cm Based on the figureit can be concluded that the controllers regulate the water
Mathematical Problems in Engineering 7
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
SMC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
TC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
STC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
QCC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
PCL
Figure 5 The control signals of the designed controllers
Table 1 Characteristic of the coupled tanks system
Gravitational rate 119892 981 cms2
Cross-sectional area of both tanks 2082 cm2
Area of the connecting pipe 1198861
058 cm2
Area of the outlet 1198862
024 cm2
level successfully with approximately the same performanceNote that the controllers are able to regulate any desiredwaterlevels without adjustments of any parameter
The behaviors of sliding surfaceserror are represented inFigure 4 for the desired level of 6 cm Based on the figureit can be seen that in all cases the controllers show typicalsliding mode behavior that is the error reaches 0 in finite
Table 2 Controllers parameters
Controller SMC TC STC QCC PCLParameters 120582 119896 119903
11199032
120572 120582 120572 120573 120572 120573
Value 067 90 500 100 220 14 65 2 100 1
time and stays 0 afterwards The derivative of error withrespect to time is also shown for the TA QCC and PLCcontrollers The error derivative also converges to zero Notethat in the case of the 1-SMC and STC the error derivatives arenot shown because the error derivatives do not play a majorrole in the design of the controller
Figure 5 shows the control signal of the five controllersThe controllers have the same control signal until they reach
8 Mathematical Problems in Engineering
Table 3 Time domain performancemeasures for different119867 values
119867 (cm) Controller 119879119903(s) 119879
119904(s) Os () IAE
300
SMC 29975 36626 1776 52459TA 30010 51783 7506 54823STC 30017 52124 7769 56214QCC 30010 51250 7085 54580PCL 30010 51576 7344 54704
600
SMC 69308 84162 0097 234125TA 69335 95179 2522 236066STC 69330 95560 2621 236735QCC 69335 94630 2393 235909PCL 69335 94975 2473 235973
800
SMC 101366 123310 0033 445981TA 101384 123330 1392 447400STC 101378 123315 1457 447537QCC 101384 123330 1327 447329PCL 101384 123330 1367 447357
the sliding surface The difference between the signals of the2-SM controllers is the increase of the on-off control in theorder STC and TA for the QCC and PCL respectively
To compare the performance of the controllers the timedomain performance measures such as the settling time therise time the percentage overshoot and the integral absoluteerror (IAE) are used The settling time is defined as the timerequired for the response to settle within 1of the steady statevalue The rise time is defined as the time required for theoutput to change from 10 to 90 of its final value The IAEis given by the following equation
IAE = int119905
0
|120590| 119889119905 (38)
The performancemeasures have been computed for threedifferent specified levels of 3 6 and 8 cm as listed in Table 3It can be seen from the table that all the used controllers haveapproximately the same rise time in all the cases The QCCcontroller has a slightly less settling overshoot and IAE
The results of the tracking test of the five controllersusing a square signal reference input are shown in Figure 6Based on the figure it can be observed that the trackingperformance for the all the controller is good In terms of theIAE the values obtained are listed in Table 4 From the valuesgiven in the Table 4 it can be seen that the smallest IAE isfor the 1-SM controller the 2-SMC have approximately thesame IAE From the comparison it can be reported that the1-SM controller slightly outperforms the 2-SM controller inall aspects but the controller requires more information thanthe 2-SM controllers as can be observed from Section 4
6 Conclusions
In this paper four second order sliding mode controllersnamely the twisting the super twisting the quasi-con-
0
2
4
6
8
Leve
l (cm
)
Ref
Ref
SMC
0
2
4
6
8
Leve
l (cm
)
TA
Ref
0
2
4
6
8
Leve
l (cm
)
STC
Ref
0
2
4
6
8
Leve
l (cm
)
QCC
Ref
0
2
4
6
8
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
Leve
l (cm
)
PLC
Figure 6 Level tracking test for the different controllers
Mathematical Problems in Engineering 9
Table 4 IAE for the different controllers from the tracking test
Controller SMC TA STC QCC PCLIAE 24232 24800 24751 24689 24842
tinuous and the prescribed convergence law controller havebeen successfully designed to regulate the water level in thesecond tank of a coupled tanks system The efficacy andusability of the proposed controllers are verified throughcomputer simulation tests Comparison between the con-trollers is based on the time domain performance measuresResults showed that all the controllers are able to regulate thewater level without major differences in their performanceComparison of the 2-SM controllers against 1-SM controllershowed that less information is required in the case of the 2-SM controller than the 1-SMC
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This project was financially supported by King Saud Univer-sity Vice Deanship of Research Chairs
References
[1] S K Singh N Katal and S G Modani ldquoMulti-objectiveoptimization of PID controller for coupled-tank liquid-levelcontrol system using genetic algorithmrdquo in Proceedings of theSecond International Conference on Soft Computing for ProblemSolving (SocProS 2012) December 28ndash30 2012 vol 236 ofAdvances in Intelligent Systems and Computing pp 59ndash66Springer New Delhi India 2014
[2] J-X Xu C-C Hang and C Liu ldquoParallel structure and tuningof a fuzzy PID controllerrdquo Automatica vol 36 no 5 pp 673ndash684 2000
[3] N K Poulsen B Kouvaritakis and M Cannon ldquoNonlinearconstrained predictive control applied to a coupled-tanks appa-ratusrdquo IEE Proceedings Control Theory and Applications vol148 no 1 pp 17ndash24 2001
[4] AKumarMVashishth and L Rai ldquoLiquid level control of cou-pled tank system using fractional PID controllerrdquo InternationalJournal of Emerging Trends in Electrical and Electronics vol 3no 1 2013
[5] V Utkin J Guldner and M Shijun Sliding Mode Control inElectro-Mechanical Systems vol 34 CRC Press 1999
[6] C Edwards and S Spurgeon Sliding Mode Control Theory andApplications CRC Press 1998
[7] K D Young V I Utkin and U Ozguner ldquoA control engineerrsquosguide to sliding mode controlrdquo IEEE Transactions on ControlSystems Technology vol 7 no 3 pp 328ndash342 1999
[8] N B Almutairi and M Zribi ldquoSliding mode control of coupledtanksrdquoMechatronics vol 16 no 7 pp 427ndash441 2006
[9] S Aydin and S Tokat ldquoSliding mode control of a coupledtank system with a state varying sliding surface parameterrdquo
in Proceedings of the IEEE International Workshop on VariableStructure Systems (VSS rsquo08) pp 355ndash360 IEEE Antalya TurkeyJune 2008
[10] A Boubakir F Boudjema and S Labiod ldquoA neuro-fuzzy-sliding mode controller using nonlinear sliding surface appliedto the coupled tanks systemrdquo International Journal of Automa-tion and Computing vol 6 no 1 pp 72ndash80 2009
[11] M K Khan and S K Spurgeon ldquoRobust MIMO water levelcontrol in interconnected twin-tanks using second order slidingmode controlrdquo Control Engineering Practice vol 14 no 4 pp375ndash386 2006
[12] C Pukdeboon ldquoSecond-order sliding mode controllers forspacecraft relative translationrdquo Applied Mathematical Sciencesvol 6 no 100 pp 4965ndash4979 2012
[13] I Eker ldquoSecond-order sliding mode control with experimentalapplicationrdquo ISA Transactions vol 49 no 3 pp 394ndash405 2010
[14] S Mondal and C Mahanta ldquoComposite nonlinear feedbackbased discrete integral sliding mode controller for uncertainsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 17 no 3 pp 1320ndash1331 2012
[15] S Mondal and C Mahanta ldquoNonlinear sliding surface basedsecond order sliding mode controller for uncertain linearsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 9 pp 3760ndash3769 2011
[16] S Mondal and CMahanta ldquoA fast converging robust controllerusing adaptive second order sliding moderdquo ISA Transactionsvol 51 no 6 pp 713ndash721 2012
[17] M Defoort T Floquet A Kokosy andW Perruquetti ldquoA novelhigher order sliding mode control schemerdquo Systems amp ControlLetters vol 58 no 2 pp 102ndash108 2009
[18] A Levant ldquoHigher-order sliding modes differentiation andoutput-feedback controlrdquo International Journal of Control vol76 no 9-10 pp 924ndash941 2003
[19] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Birkhauser 1st edition 2014
[20] M K Khan S K Spurgeon and A Levant ldquoSimple outputfeedback 2-sliding controller for systems of relative degree twordquoin Proceedings of the European Control Conference (ECC rsquo03)vol 3 September 2003
[21] A Levant ldquoQuasi-continuous high-order sliding-mode con-trollersrdquo IEEE Transactions on Automatic Control vol 50 no11 pp 1812ndash1816 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
SMC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
TC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
STC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
QCC
0 50 100 150
0
20
40
60
Time (s)
Flow
rate
PCL
Figure 5 The control signals of the designed controllers
Table 1 Characteristic of the coupled tanks system
Gravitational rate 119892 981 cms2
Cross-sectional area of both tanks 2082 cm2
Area of the connecting pipe 1198861
058 cm2
Area of the outlet 1198862
024 cm2
level successfully with approximately the same performanceNote that the controllers are able to regulate any desiredwaterlevels without adjustments of any parameter
The behaviors of sliding surfaceserror are represented inFigure 4 for the desired level of 6 cm Based on the figureit can be seen that in all cases the controllers show typicalsliding mode behavior that is the error reaches 0 in finite
Table 2 Controllers parameters
Controller SMC TC STC QCC PCLParameters 120582 119896 119903
11199032
120572 120582 120572 120573 120572 120573
Value 067 90 500 100 220 14 65 2 100 1
time and stays 0 afterwards The derivative of error withrespect to time is also shown for the TA QCC and PLCcontrollers The error derivative also converges to zero Notethat in the case of the 1-SMC and STC the error derivatives arenot shown because the error derivatives do not play a majorrole in the design of the controller
Figure 5 shows the control signal of the five controllersThe controllers have the same control signal until they reach
8 Mathematical Problems in Engineering
Table 3 Time domain performancemeasures for different119867 values
119867 (cm) Controller 119879119903(s) 119879
119904(s) Os () IAE
300
SMC 29975 36626 1776 52459TA 30010 51783 7506 54823STC 30017 52124 7769 56214QCC 30010 51250 7085 54580PCL 30010 51576 7344 54704
600
SMC 69308 84162 0097 234125TA 69335 95179 2522 236066STC 69330 95560 2621 236735QCC 69335 94630 2393 235909PCL 69335 94975 2473 235973
800
SMC 101366 123310 0033 445981TA 101384 123330 1392 447400STC 101378 123315 1457 447537QCC 101384 123330 1327 447329PCL 101384 123330 1367 447357
the sliding surface The difference between the signals of the2-SM controllers is the increase of the on-off control in theorder STC and TA for the QCC and PCL respectively
To compare the performance of the controllers the timedomain performance measures such as the settling time therise time the percentage overshoot and the integral absoluteerror (IAE) are used The settling time is defined as the timerequired for the response to settle within 1of the steady statevalue The rise time is defined as the time required for theoutput to change from 10 to 90 of its final value The IAEis given by the following equation
IAE = int119905
0
|120590| 119889119905 (38)
The performancemeasures have been computed for threedifferent specified levels of 3 6 and 8 cm as listed in Table 3It can be seen from the table that all the used controllers haveapproximately the same rise time in all the cases The QCCcontroller has a slightly less settling overshoot and IAE
The results of the tracking test of the five controllersusing a square signal reference input are shown in Figure 6Based on the figure it can be observed that the trackingperformance for the all the controller is good In terms of theIAE the values obtained are listed in Table 4 From the valuesgiven in the Table 4 it can be seen that the smallest IAE isfor the 1-SM controller the 2-SMC have approximately thesame IAE From the comparison it can be reported that the1-SM controller slightly outperforms the 2-SM controller inall aspects but the controller requires more information thanthe 2-SM controllers as can be observed from Section 4
6 Conclusions
In this paper four second order sliding mode controllersnamely the twisting the super twisting the quasi-con-
0
2
4
6
8
Leve
l (cm
)
Ref
Ref
SMC
0
2
4
6
8
Leve
l (cm
)
TA
Ref
0
2
4
6
8
Leve
l (cm
)
STC
Ref
0
2
4
6
8
Leve
l (cm
)
QCC
Ref
0
2
4
6
8
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
Leve
l (cm
)
PLC
Figure 6 Level tracking test for the different controllers
Mathematical Problems in Engineering 9
Table 4 IAE for the different controllers from the tracking test
Controller SMC TA STC QCC PCLIAE 24232 24800 24751 24689 24842
tinuous and the prescribed convergence law controller havebeen successfully designed to regulate the water level in thesecond tank of a coupled tanks system The efficacy andusability of the proposed controllers are verified throughcomputer simulation tests Comparison between the con-trollers is based on the time domain performance measuresResults showed that all the controllers are able to regulate thewater level without major differences in their performanceComparison of the 2-SM controllers against 1-SM controllershowed that less information is required in the case of the 2-SM controller than the 1-SMC
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This project was financially supported by King Saud Univer-sity Vice Deanship of Research Chairs
References
[1] S K Singh N Katal and S G Modani ldquoMulti-objectiveoptimization of PID controller for coupled-tank liquid-levelcontrol system using genetic algorithmrdquo in Proceedings of theSecond International Conference on Soft Computing for ProblemSolving (SocProS 2012) December 28ndash30 2012 vol 236 ofAdvances in Intelligent Systems and Computing pp 59ndash66Springer New Delhi India 2014
[2] J-X Xu C-C Hang and C Liu ldquoParallel structure and tuningof a fuzzy PID controllerrdquo Automatica vol 36 no 5 pp 673ndash684 2000
[3] N K Poulsen B Kouvaritakis and M Cannon ldquoNonlinearconstrained predictive control applied to a coupled-tanks appa-ratusrdquo IEE Proceedings Control Theory and Applications vol148 no 1 pp 17ndash24 2001
[4] AKumarMVashishth and L Rai ldquoLiquid level control of cou-pled tank system using fractional PID controllerrdquo InternationalJournal of Emerging Trends in Electrical and Electronics vol 3no 1 2013
[5] V Utkin J Guldner and M Shijun Sliding Mode Control inElectro-Mechanical Systems vol 34 CRC Press 1999
[6] C Edwards and S Spurgeon Sliding Mode Control Theory andApplications CRC Press 1998
[7] K D Young V I Utkin and U Ozguner ldquoA control engineerrsquosguide to sliding mode controlrdquo IEEE Transactions on ControlSystems Technology vol 7 no 3 pp 328ndash342 1999
[8] N B Almutairi and M Zribi ldquoSliding mode control of coupledtanksrdquoMechatronics vol 16 no 7 pp 427ndash441 2006
[9] S Aydin and S Tokat ldquoSliding mode control of a coupledtank system with a state varying sliding surface parameterrdquo
in Proceedings of the IEEE International Workshop on VariableStructure Systems (VSS rsquo08) pp 355ndash360 IEEE Antalya TurkeyJune 2008
[10] A Boubakir F Boudjema and S Labiod ldquoA neuro-fuzzy-sliding mode controller using nonlinear sliding surface appliedto the coupled tanks systemrdquo International Journal of Automa-tion and Computing vol 6 no 1 pp 72ndash80 2009
[11] M K Khan and S K Spurgeon ldquoRobust MIMO water levelcontrol in interconnected twin-tanks using second order slidingmode controlrdquo Control Engineering Practice vol 14 no 4 pp375ndash386 2006
[12] C Pukdeboon ldquoSecond-order sliding mode controllers forspacecraft relative translationrdquo Applied Mathematical Sciencesvol 6 no 100 pp 4965ndash4979 2012
[13] I Eker ldquoSecond-order sliding mode control with experimentalapplicationrdquo ISA Transactions vol 49 no 3 pp 394ndash405 2010
[14] S Mondal and C Mahanta ldquoComposite nonlinear feedbackbased discrete integral sliding mode controller for uncertainsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 17 no 3 pp 1320ndash1331 2012
[15] S Mondal and C Mahanta ldquoNonlinear sliding surface basedsecond order sliding mode controller for uncertain linearsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 9 pp 3760ndash3769 2011
[16] S Mondal and CMahanta ldquoA fast converging robust controllerusing adaptive second order sliding moderdquo ISA Transactionsvol 51 no 6 pp 713ndash721 2012
[17] M Defoort T Floquet A Kokosy andW Perruquetti ldquoA novelhigher order sliding mode control schemerdquo Systems amp ControlLetters vol 58 no 2 pp 102ndash108 2009
[18] A Levant ldquoHigher-order sliding modes differentiation andoutput-feedback controlrdquo International Journal of Control vol76 no 9-10 pp 924ndash941 2003
[19] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Birkhauser 1st edition 2014
[20] M K Khan S K Spurgeon and A Levant ldquoSimple outputfeedback 2-sliding controller for systems of relative degree twordquoin Proceedings of the European Control Conference (ECC rsquo03)vol 3 September 2003
[21] A Levant ldquoQuasi-continuous high-order sliding-mode con-trollersrdquo IEEE Transactions on Automatic Control vol 50 no11 pp 1812ndash1816 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Table 3 Time domain performancemeasures for different119867 values
119867 (cm) Controller 119879119903(s) 119879
119904(s) Os () IAE
300
SMC 29975 36626 1776 52459TA 30010 51783 7506 54823STC 30017 52124 7769 56214QCC 30010 51250 7085 54580PCL 30010 51576 7344 54704
600
SMC 69308 84162 0097 234125TA 69335 95179 2522 236066STC 69330 95560 2621 236735QCC 69335 94630 2393 235909PCL 69335 94975 2473 235973
800
SMC 101366 123310 0033 445981TA 101384 123330 1392 447400STC 101378 123315 1457 447537QCC 101384 123330 1327 447329PCL 101384 123330 1367 447357
the sliding surface The difference between the signals of the2-SM controllers is the increase of the on-off control in theorder STC and TA for the QCC and PCL respectively
To compare the performance of the controllers the timedomain performance measures such as the settling time therise time the percentage overshoot and the integral absoluteerror (IAE) are used The settling time is defined as the timerequired for the response to settle within 1of the steady statevalue The rise time is defined as the time required for theoutput to change from 10 to 90 of its final value The IAEis given by the following equation
IAE = int119905
0
|120590| 119889119905 (38)
The performancemeasures have been computed for threedifferent specified levels of 3 6 and 8 cm as listed in Table 3It can be seen from the table that all the used controllers haveapproximately the same rise time in all the cases The QCCcontroller has a slightly less settling overshoot and IAE
The results of the tracking test of the five controllersusing a square signal reference input are shown in Figure 6Based on the figure it can be observed that the trackingperformance for the all the controller is good In terms of theIAE the values obtained are listed in Table 4 From the valuesgiven in the Table 4 it can be seen that the smallest IAE isfor the 1-SM controller the 2-SMC have approximately thesame IAE From the comparison it can be reported that the1-SM controller slightly outperforms the 2-SM controller inall aspects but the controller requires more information thanthe 2-SM controllers as can be observed from Section 4
6 Conclusions
In this paper four second order sliding mode controllersnamely the twisting the super twisting the quasi-con-
0
2
4
6
8
Leve
l (cm
)
Ref
Ref
SMC
0
2
4
6
8
Leve
l (cm
)
TA
Ref
0
2
4
6
8
Leve
l (cm
)
STC
Ref
0
2
4
6
8
Leve
l (cm
)
QCC
Ref
0
2
4
6
8
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
0 50 100 150 200 250 300Time (s)
Leve
l (cm
)
PLC
Figure 6 Level tracking test for the different controllers
Mathematical Problems in Engineering 9
Table 4 IAE for the different controllers from the tracking test
Controller SMC TA STC QCC PCLIAE 24232 24800 24751 24689 24842
tinuous and the prescribed convergence law controller havebeen successfully designed to regulate the water level in thesecond tank of a coupled tanks system The efficacy andusability of the proposed controllers are verified throughcomputer simulation tests Comparison between the con-trollers is based on the time domain performance measuresResults showed that all the controllers are able to regulate thewater level without major differences in their performanceComparison of the 2-SM controllers against 1-SM controllershowed that less information is required in the case of the 2-SM controller than the 1-SMC
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This project was financially supported by King Saud Univer-sity Vice Deanship of Research Chairs
References
[1] S K Singh N Katal and S G Modani ldquoMulti-objectiveoptimization of PID controller for coupled-tank liquid-levelcontrol system using genetic algorithmrdquo in Proceedings of theSecond International Conference on Soft Computing for ProblemSolving (SocProS 2012) December 28ndash30 2012 vol 236 ofAdvances in Intelligent Systems and Computing pp 59ndash66Springer New Delhi India 2014
[2] J-X Xu C-C Hang and C Liu ldquoParallel structure and tuningof a fuzzy PID controllerrdquo Automatica vol 36 no 5 pp 673ndash684 2000
[3] N K Poulsen B Kouvaritakis and M Cannon ldquoNonlinearconstrained predictive control applied to a coupled-tanks appa-ratusrdquo IEE Proceedings Control Theory and Applications vol148 no 1 pp 17ndash24 2001
[4] AKumarMVashishth and L Rai ldquoLiquid level control of cou-pled tank system using fractional PID controllerrdquo InternationalJournal of Emerging Trends in Electrical and Electronics vol 3no 1 2013
[5] V Utkin J Guldner and M Shijun Sliding Mode Control inElectro-Mechanical Systems vol 34 CRC Press 1999
[6] C Edwards and S Spurgeon Sliding Mode Control Theory andApplications CRC Press 1998
[7] K D Young V I Utkin and U Ozguner ldquoA control engineerrsquosguide to sliding mode controlrdquo IEEE Transactions on ControlSystems Technology vol 7 no 3 pp 328ndash342 1999
[8] N B Almutairi and M Zribi ldquoSliding mode control of coupledtanksrdquoMechatronics vol 16 no 7 pp 427ndash441 2006
[9] S Aydin and S Tokat ldquoSliding mode control of a coupledtank system with a state varying sliding surface parameterrdquo
in Proceedings of the IEEE International Workshop on VariableStructure Systems (VSS rsquo08) pp 355ndash360 IEEE Antalya TurkeyJune 2008
[10] A Boubakir F Boudjema and S Labiod ldquoA neuro-fuzzy-sliding mode controller using nonlinear sliding surface appliedto the coupled tanks systemrdquo International Journal of Automa-tion and Computing vol 6 no 1 pp 72ndash80 2009
[11] M K Khan and S K Spurgeon ldquoRobust MIMO water levelcontrol in interconnected twin-tanks using second order slidingmode controlrdquo Control Engineering Practice vol 14 no 4 pp375ndash386 2006
[12] C Pukdeboon ldquoSecond-order sliding mode controllers forspacecraft relative translationrdquo Applied Mathematical Sciencesvol 6 no 100 pp 4965ndash4979 2012
[13] I Eker ldquoSecond-order sliding mode control with experimentalapplicationrdquo ISA Transactions vol 49 no 3 pp 394ndash405 2010
[14] S Mondal and C Mahanta ldquoComposite nonlinear feedbackbased discrete integral sliding mode controller for uncertainsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 17 no 3 pp 1320ndash1331 2012
[15] S Mondal and C Mahanta ldquoNonlinear sliding surface basedsecond order sliding mode controller for uncertain linearsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 9 pp 3760ndash3769 2011
[16] S Mondal and CMahanta ldquoA fast converging robust controllerusing adaptive second order sliding moderdquo ISA Transactionsvol 51 no 6 pp 713ndash721 2012
[17] M Defoort T Floquet A Kokosy andW Perruquetti ldquoA novelhigher order sliding mode control schemerdquo Systems amp ControlLetters vol 58 no 2 pp 102ndash108 2009
[18] A Levant ldquoHigher-order sliding modes differentiation andoutput-feedback controlrdquo International Journal of Control vol76 no 9-10 pp 924ndash941 2003
[19] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Birkhauser 1st edition 2014
[20] M K Khan S K Spurgeon and A Levant ldquoSimple outputfeedback 2-sliding controller for systems of relative degree twordquoin Proceedings of the European Control Conference (ECC rsquo03)vol 3 September 2003
[21] A Levant ldquoQuasi-continuous high-order sliding-mode con-trollersrdquo IEEE Transactions on Automatic Control vol 50 no11 pp 1812ndash1816 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Table 4 IAE for the different controllers from the tracking test
Controller SMC TA STC QCC PCLIAE 24232 24800 24751 24689 24842
tinuous and the prescribed convergence law controller havebeen successfully designed to regulate the water level in thesecond tank of a coupled tanks system The efficacy andusability of the proposed controllers are verified throughcomputer simulation tests Comparison between the con-trollers is based on the time domain performance measuresResults showed that all the controllers are able to regulate thewater level without major differences in their performanceComparison of the 2-SM controllers against 1-SM controllershowed that less information is required in the case of the 2-SM controller than the 1-SMC
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This project was financially supported by King Saud Univer-sity Vice Deanship of Research Chairs
References
[1] S K Singh N Katal and S G Modani ldquoMulti-objectiveoptimization of PID controller for coupled-tank liquid-levelcontrol system using genetic algorithmrdquo in Proceedings of theSecond International Conference on Soft Computing for ProblemSolving (SocProS 2012) December 28ndash30 2012 vol 236 ofAdvances in Intelligent Systems and Computing pp 59ndash66Springer New Delhi India 2014
[2] J-X Xu C-C Hang and C Liu ldquoParallel structure and tuningof a fuzzy PID controllerrdquo Automatica vol 36 no 5 pp 673ndash684 2000
[3] N K Poulsen B Kouvaritakis and M Cannon ldquoNonlinearconstrained predictive control applied to a coupled-tanks appa-ratusrdquo IEE Proceedings Control Theory and Applications vol148 no 1 pp 17ndash24 2001
[4] AKumarMVashishth and L Rai ldquoLiquid level control of cou-pled tank system using fractional PID controllerrdquo InternationalJournal of Emerging Trends in Electrical and Electronics vol 3no 1 2013
[5] V Utkin J Guldner and M Shijun Sliding Mode Control inElectro-Mechanical Systems vol 34 CRC Press 1999
[6] C Edwards and S Spurgeon Sliding Mode Control Theory andApplications CRC Press 1998
[7] K D Young V I Utkin and U Ozguner ldquoA control engineerrsquosguide to sliding mode controlrdquo IEEE Transactions on ControlSystems Technology vol 7 no 3 pp 328ndash342 1999
[8] N B Almutairi and M Zribi ldquoSliding mode control of coupledtanksrdquoMechatronics vol 16 no 7 pp 427ndash441 2006
[9] S Aydin and S Tokat ldquoSliding mode control of a coupledtank system with a state varying sliding surface parameterrdquo
in Proceedings of the IEEE International Workshop on VariableStructure Systems (VSS rsquo08) pp 355ndash360 IEEE Antalya TurkeyJune 2008
[10] A Boubakir F Boudjema and S Labiod ldquoA neuro-fuzzy-sliding mode controller using nonlinear sliding surface appliedto the coupled tanks systemrdquo International Journal of Automa-tion and Computing vol 6 no 1 pp 72ndash80 2009
[11] M K Khan and S K Spurgeon ldquoRobust MIMO water levelcontrol in interconnected twin-tanks using second order slidingmode controlrdquo Control Engineering Practice vol 14 no 4 pp375ndash386 2006
[12] C Pukdeboon ldquoSecond-order sliding mode controllers forspacecraft relative translationrdquo Applied Mathematical Sciencesvol 6 no 100 pp 4965ndash4979 2012
[13] I Eker ldquoSecond-order sliding mode control with experimentalapplicationrdquo ISA Transactions vol 49 no 3 pp 394ndash405 2010
[14] S Mondal and C Mahanta ldquoComposite nonlinear feedbackbased discrete integral sliding mode controller for uncertainsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 17 no 3 pp 1320ndash1331 2012
[15] S Mondal and C Mahanta ldquoNonlinear sliding surface basedsecond order sliding mode controller for uncertain linearsystemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 16 no 9 pp 3760ndash3769 2011
[16] S Mondal and CMahanta ldquoA fast converging robust controllerusing adaptive second order sliding moderdquo ISA Transactionsvol 51 no 6 pp 713ndash721 2012
[17] M Defoort T Floquet A Kokosy andW Perruquetti ldquoA novelhigher order sliding mode control schemerdquo Systems amp ControlLetters vol 58 no 2 pp 102ndash108 2009
[18] A Levant ldquoHigher-order sliding modes differentiation andoutput-feedback controlrdquo International Journal of Control vol76 no 9-10 pp 924ndash941 2003
[19] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Birkhauser 1st edition 2014
[20] M K Khan S K Spurgeon and A Levant ldquoSimple outputfeedback 2-sliding controller for systems of relative degree twordquoin Proceedings of the European Control Conference (ECC rsquo03)vol 3 September 2003
[21] A Levant ldquoQuasi-continuous high-order sliding-mode con-trollersrdquo IEEE Transactions on Automatic Control vol 50 no11 pp 1812ndash1816 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Related Documents











