Research Article Numerical Computation of Homogeneous Slope Stability Shuangshuang Xiao, Kemin Li, Xiaohua Ding, and Tong Liu School of Mines, State Key Laboratory of Coal Resources and Safe Mining, China University of Mining and Technology, Xuzhou, Jiangsu 221116, China Correspondence should be addressed to Kemin Li; [email protected] Received 7 November 2014; Accepted 23 January 2015 Academic Editor: Cheng-Jian Lin Copyright © 2015 Shuangshuang Xiao et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. To simplify the computational process of homogeneous slope stability, improve computational accuracy, and find multiple potential slip surfaces of a complex geometric slope, this study utilized the limit equilibrium method to derive expression equations of overall and partial factors of safety. is study transformed the solution of the minimum factor of safety (FOS) to solving of a constrained nonlinear programming problem and applied an exhaustive method (EM) and particle swarm optimization algorithm (PSO) to this problem. In simple slope examples, the computational results using an EM and PSO were close to those obtained using other methods. Compared to the EM, the PSO had a small computation error and a significantly shorter computation time. As a result, the PSO could precisely calculate the slope FOS with high efficiency. e example of the multistage slope analysis indicated that this slope had two potential slip surfaces. e factors of safety were 1.1182 and 1.1560, respectively. e differences between these and the minimum FOS (1.0759) were small, but the positions of the slip surfaces were completely different than the critical slip surface (CSS). 1. Introduction Slide is one of the most common types of natural hazards on slopes, which might lead to considerable casualties and eco- nomic loss [1, 2]. To guarantee the stability of a homogenous slope, the circular arc method is traditionally used for stability analysis. e two main objectives of slope stability analysis are calculating FOS for a given slip surface and determining the CSS for a given slope [3]. e Swedish circle method, the so-called Fellenius slice method, is a widely used classic algorithm for calculating the FOS of an arc sliding slope [4]. To avoid repeated slices for summation, Zhang et al. derived the integral expression equations for the FOS using the Swedish circle method and proposed different solutions for minimum factors of safety and for critical slip surfaces [5– 8]. However, all of these efforts were suitable for an integral over a slope with a plane surface [9]. For a slope with a complex surface, due to variations of the slope geometry, the integral results might be different, in which case, the integral expression equations derived by Zhang et al. could become problematic. Furthermore, complex slope geometry could result in multiple slip surfaces, which have a relatively small difference between their FOS and the minimum FOS. However, the positions of the slip surfaces are completely different from that of the CSS. If only the CSS was identified and supported, the slope could slide along other surfaces [10, 11]. erefore, all potential slip surfaces should be identified and supported or partially supported according to the actual situation to ensure the stability of the slope. Moreover, when the slope geometry is complex, there may be an intercept between the precalculated slip surface and the slope, that is, a broken arc [12, 13], which could further complicate the stability computation. e solution methods for an integral expression equation of the slope FOS include analytical methods [9], exhaustive method [14], numerical optimization method [15], random search method [16], and artificial intelligent search method [17]. e analytical method uses a partial derivative of the expression equation through finding the extreme values of the function. is method requires multiple cross iterations for analyzing a pure clay slope [18], and is even less effective in Hindawi Publishing Corporation Computational Intelligence and Neuroscience Volume 2015, Article ID 802835, 10 pages http://dx.doi.org/10.1155/2015/802835

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Research ArticleNumerical Computation of Homogeneous Slope Stability
Shuangshuang Xiao Kemin Li Xiaohua Ding and Tong Liu
School of Mines State Key Laboratory of Coal Resources and Safe Mining China University of Mining and TechnologyXuzhou Jiangsu 221116 China
Correspondence should be addressed to Kemin Li likemin515hotmailcom
Received 7 November 2014 Accepted 23 January 2015
Academic Editor Cheng-Jian Lin
Copyright copy 2015 Shuangshuang Xiao et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
To simplify the computational process of homogeneous slope stability improve computational accuracy and findmultiple potentialslip surfaces of a complex geometric slope this study utilized the limit equilibriummethod to derive expression equations of overalland partial factors of safety This study transformed the solution of the minimum factor of safety (FOS) to solving of a constrainednonlinear programming problem and applied an exhaustive method (EM) and particle swarm optimization algorithm (PSO) tothis problem In simple slope examples the computational results using an EM and PSO were close to those obtained using othermethods Compared to the EM the PSO had a small computation error and a significantly shorter computation time As a resultthe PSO could precisely calculate the slope FOSwith high efficiencyThe example of themultistage slope analysis indicated that thisslope had two potential slip surfaces The factors of safety were 11182 and 11560 respectively The differences between these andthe minimum FOS (10759) were small but the positions of the slip surfaces were completely different than the critical slip surface(CSS)
1 Introduction
Slide is one of the most common types of natural hazards onslopes which might lead to considerable casualties and eco-nomic loss [1 2] To guarantee the stability of a homogenousslope the circular arcmethod is traditionally used for stabilityanalysis The two main objectives of slope stability analysisare calculating FOS for a given slip surface and determiningthe CSS for a given slope [3] The Swedish circle methodthe so-called Fellenius slice method is a widely used classicalgorithm for calculating the FOS of an arc sliding slope[4] To avoid repeated slices for summation Zhang et alderived the integral expression equations for the FOS usingthe Swedish circle method and proposed different solutionsforminimum factors of safety and for critical slip surfaces [5ndash8] However all of these efforts were suitable for an integralover a slope with a plane surface [9] For a slope with acomplex surface due to variations of the slope geometry theintegral results might be different in which case the integralexpression equations derived by Zhang et al could becomeproblematic
Furthermore complex slope geometry could result inmultiple slip surfaces which have a relatively small differencebetween their FOS and the minimum FOS However thepositions of the slip surfaces are completely different fromthat of the CSS If only the CSS was identified and supportedthe slope could slide along other surfaces [10 11] Thereforeall potential slip surfaces should be identified and supportedor partially supported according to the actual situation toensure the stability of the slope Moreover when the slopegeometry is complex there may be an intercept between theprecalculated slip surface and the slope that is a brokenarc [12 13] which could further complicate the stabilitycomputation
The solution methods for an integral expression equationof the slope FOS include analytical methods [9] exhaustivemethod [14] numerical optimization method [15] randomsearch method [16] and artificial intelligent search method[17] The analytical method uses a partial derivative of theexpression equation through finding the extreme values ofthe function This method requires multiple cross iterationsfor analyzing a pure clay slope [18] and is even less effective in
Hindawi Publishing CorporationComputational Intelligence and NeuroscienceVolume 2015 Article ID 802835 10 pageshttpdxdoiorg1011552015802835
2 Computational Intelligence and Neuroscience
analyzing slopes with complex surface while other methodsusually require a search of the variables to perform a pre-calculation In this regard there are currently three typicalselection methods for variable searching (1) the horizontalcoordinate 119909
119888 vertical coordinate 119910
119888of the center of critical
circular arc and the radius 119877 [19 20] (2) the horizontalcoordinates of the intercepts of the slip surface with a slopetop and bottom surfaces that is 119909
119906and 119909
119887 and the vertical
coordinate of the center of critical circular arc 119910119888[21] (3)
the horizontal coordinates of the intercepts of the slip surfacewith the slope top and bottom surfaces and the arc height ℎ
119886
[22] or the horizontal coordinate of the intercept between the119909-axis and the tangent that is at the intercept between the slipsurface and the slope top 119909
119905
In the first method the range of 119909119888 119910119888 and 119877 is deter-
mined empirically Unreasonable ranges can lead to a missedoptimum solution In the second method determination ofthe range of the three parameters119909
119906119909119887 and119910
119888is also needed
But the location of the intercept between the slip surfaceand slope top and bottom is easily controlled and the rangeof 119909119906and 119909
119887is relatively easy to determine In the third
method the range of 119909119906and 119909
119887needs to be estimated and
the range of ℎ119886or 119909119905is known Although the range of ℎ
119886or
119909119905does not need to be estimated the variation of ℎ
119886or 119909119905
corresponds to the variation of 119877 For instance the varyingrange of ℎ
119886is from ℎ
119886max to zero which corresponds to therange if 119877 would be from 119877min to an infinitely large valuewhich is essentially equivalent to selecting 119877 as the searchingvariable and letting its range be [119877min +infin] Therefore thisapproach does not improve the performance of the firstmethod but increases the search range considerably whichadds unnecessary searching Although there is no essentialdifference among these three methods the second methodselects relatively direct searching variables and the range isfairly easy to control
This paper utilized the concept of these described integralmethods and derived the integral expression equation of theFOS for a homogenous slope with complex slope geometryThis study used the second method to select searchingvariables and applied an EM and PSO to solve for theminimum FOS Using the method presented in this paperthe minimum FOS of a homogenous slope can be effectivelycalculated The CSS as well as other potential slip surfacescan be identified which provides a scientific basis for slopesupport
2 Derivation of the Integral ExpressionEquation for Slope FOS
21 Integral Expression Equation for the Overall Slope FOSFor a slope with complex geometry the line of the slopesurface can be assumed to consist of several component lines[23] For the slope shown in Figure 1 the slope surface iscomposed of 119899 minus 1 lines 119860
11198602 11986021198603 119860
119899minus1119860119899 The slope
is assumed to be a homogenous slope and the surfaces of theslopersquos top and bottomare planesMoreover it is also assumedthat there is no effect of slope loading or groundwaterinfluenceTheheight of slope is119867 the unit weight of the slope
C
y
x
H
dxx
dW
dNdT
dR
h
R
middot middot middot
120572
An
Anminus1
An+1
A0 A1
A2
Figure 1 Coordinate system for the slopes stability analysis andforces acting on differential slices
soil is 120574 the internal friction angle is 120593 and the cohesion is 119888The coordinate system is established with the origin selectedat the toe of slope 119860
1 shown in Figure 1 Let the radius of
the critical arc be 119877 and the center of the arc 119862(119909119888 119910119888) The
intercepts between the slip surface and the surfaces of slopersquostop and bottom are119860
119899+1and119860
0 respectivelyThe coordinate
of 119860119894is (119909119894 119910119894) (119894 = 0 1 2 119899 + 1) thus 119910
0= 0 119909
1= 0
1199101= 0 119910
119899= 119867 and 119910
119899+1= 119867
Assuming the equation for line 119860119894119860119894+1
119910119909119894= 119896119894119909 + 119887119894 119909119894le 119909 le 119909
119894+1 (1)
where
119896119894=119910119894+1
minus 119910119894
119909119894+1
minus 119909119894
119887119894=119910119894119909119894+1
minus 119910119894+1119909119894
119909119894+1
minus 119909119894
(119909119894= 119909119894+1) 119894 = 0 1 2 119899
(2)
The equation for arc 1198600119860119899+1
was
119910119886= 119910119888minus radic1198772 minus (119909 minus 119909
119888)2
1199090le 119909 le 119909
119899+1 (3)
For the infinitely small slide bar the width was assumedto be 119889119909 and the height was ℎ thus
ℎ = 119910119909119894minus 119910119886 119909119894le 119909 le 119909
119894+1 (4)
The weight of slide bar 119889119882 = 120574ℎ119889119909 Antislide force anddownslide force were
119889119877 = 119888sec120572119889119909 + 120574ℎ tan120593 cos120572119889119909
119889119879 = 120574ℎ sin120572119889119909(5)
where sin120572 = (119909 minus 119909119888)119877
The FOS 119865 of the slope is the ratio of the torque at thecenter of arc 119862 between all antislide forces and downslideforces thus the overall FOS of the slope was
119865119911=119872119903119911
119872119904119911
=119888119868119903119911+ 120574 tan120593119868
119888119911
120574119868119904119911
(6)
Computational Intelligence and Neuroscience 3
According to (1)ndash(5) the integration yielded
119868119903119911= int119909119899+1
1199090
119877sec120572119889119909 = 1198772 (120575119899+1
minus 1205750)
119868119888119911=
119899
sum119894=0
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) cos120572119889119909
= 119875119899+1
minus 1198750+
119899
sum119894=0
[1
3119896119894(119878119894
3
minus 119878119894+1
3
)
+1
2(119896119894119909119888+ 119887119894minus 119910119888) (119879119894+1
minus 119879119894)]
119868119904119911=
119899
sum119894=0
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) sin120572119889119909
=1
31198780
3
minus1
3119878119899+1
3
+
119899
sum119894=0
119882119894
(7)
where
120575119894= arcsin(
119909119894minus 119909119888
119877) 119878
119894= radic1198772 minus (119909
119894minus 119909119888)2
119879119894= (119909119894minus 119909119888) 119878119894+ 1198772
120575119894 119875
119894= 1198772
119909119894minus1
3(119909119894minus 119909119888)3
119882119894=1
3119896119894(119909119894+1
3
minus 119909119894
3
) +1
2(119887119894minus 119896119894119909119888minus 119910119888) (119909119894+1
2
minus 119909119894
2
)
+ 119909119888(119910119888minus 119887119894) (119909119894+1
minus 119909119894)
(119894 = 0 1 2 119899)
(8)
When 119909119894= 119909119894+1
the line equation was 119909 = 119909119894 119910119894le 119910 le
119910119894+1
the corresponding integral in the range of this linewouldbe zero
22 Integral Expression Equation for the Partial Slope FOSFigure 2 shows that the slip surface intercepts with theslope surface Assuming that top and bottom intercepts havecoordinates of (119909
119898119903 119910119898119903) and (119909
119897119903 119910119897119903) thus 119909
119897le 119909119897119903
le
119909119897+1
(0 le 119897 le 119899 minus 2) 119909119898le 119909119898119903
le 119909119898+1
(119897 + 2 le 119898 le 119899in addition119898 lt 119899 when 119897 = 0)
According to (1)ndash(5) the partial FOS can be obtainedthrough integration
119865119895=119872119903119895
119872119904119895
=119888119868119903119895+ 120574 tan120593119868
119888119895
120574119868119904119895
(9)
y
0
D
R
H
x
AnAmr
Am
xlr xmr
middot middot middot
middot middot middot
Al
A1
C(xc yc)
Figure 2 Sketch of slopes partial stability analysis
where
119868119903119895= int119909119898+1
119909119897
119877sec120572119889119909 = 1198772 (120575119898+1
minus 120575119897)
119868119888119895=
119898
sum119894=119897
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) cos120572119889119909
= 119875119898+1
minus 119875119897+
119898
sum119894=119897
[1
3119896119894(119878119894
3
minus 119878119894+1
3
)
+1
2(119896119894119909119888+ 119887119894minus 119910119888) (119879119894+1
minus 119879119894)]
119868119904119895=
119898
sum119894=119897
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) sin120572119889119909
=1
3119878119897
3
minus1
3119878119898+1
3
+
119898
sum119894=119897
119882119894
(10)
where 119909119898+1
= 119909119898119903
in 120575119898+1
119878119898+1
119879119898+1
119875119898+1
and 119882119898and
119909119897= 119909119897119903in 120575119897 119878119897 119879119897 119875119897 and119882
119897
3 Calculation of Slope FOS
31 Calculation of Overall Slope FOS Equations (7) weresubstituted into (6) Equations (10) were substituted into(16) For the known slope its FOS 119865 is the function of thehorizontal and vertical coordinates of the center of the criticalarc 119909
119888and 119910
119888 as well as the radius 119877 However it is difficult
to obtain the minimum value of this function using theanalytical methodThe selection of the searching variable forthe precalculation is needed to solve the problem
From the geometrical relationship in Figure 1 it is knownthat
119909119888=1198672 + 119909
119899+1
2 minus 1199090
2
2 (119909119899+1
minus 1199090)
minus119867119910119888
119909119899+1
minus 1199090
(11)
119877 = radic(119909119899+1
minus 119909119888)2
+ (119910119888minus 119867)2
(12)
For a known slope when 1199090 119909119899+1
and 119910119888are determined
119909119888and 119877 can be determined using (11) and (12) respectively
4 Computational Intelligence and Neuroscience
that is the CSS can be obtained Therefore 1199090 119909119899+1
and119910119888can be selected as the searching variables in which
119909119899+1
ge 119909119899 1199090
le 0 To reduce the searching range arestrained range of value of 119909
0 119909119899+1
119910119888should be empirically
evaluated to ensure that 119910119888le 119910119888max 1199090 ge 119909
0min 119909119899+1 ge119909(119899+1)max In addition to avoid occurrence of a broken arcradic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877 (119894 = 1 2 119899) should be sat-isfied Under this circumstance solving for the minimumFOS requires solving the following constrained nonlinearprogramming problem
119865119911119898
= min119865119911(1199090 119909119899+1 119910119888)
st 1199090min le 1199090 le 0
119909119899le 119909119899+1
le 119909(119899+1)max
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(119894 = 1 2 119899)
(13)
When the determined critical circular arc center is on theboundary of the search region such as 119910
119888= 119910119888max 1199090 =
1199090min or 119909119899+1 = 119909
(119899+1)max the searching region should beexpanded accordingly Otherwise this could result inmissingthe optimum solution due to the small range of the valueTaking 119910
119888max as an example when the vertical coordinateof the critical arc center 119910
119888= 119910119888max (14) can be used for
adjustment Consider
119910119888max = (1 + 120582) 119910119888max (14)
where 120582 is a coefficientThis study applied an EMand PSO to solve (13)The result
yielded from the EM was compared in order to validate theresult of the PSO
311 Exhaustive Method The EM is a method that allowsthe range of 119909
0 119909119899+1
and 119910119888to vary according to a specified
step interval The FOS 119865119911should be solved at every step
for each value in which the minimum value would be theminimum FOS 119865
119911119898 The detailed solving procedure is shown
in Figure 3 This procedure can be easily carried out using aset of programmed computer codes
312 Particle Swarm Optimization Algorithm The PSO isa swarm intelligent heuristic algorithm that was proposedby Dr Eberhart and Dr Kennedy [24] It utilizes individualcoordination and information sharing in the swarm to seekthe optimum solution through iteration The concept ofPSO is simple There are few adjusting parameters and theconvergence speed is fast so it has been widely used indiscrete and continuous optimization problems [25 26]
During the searching process of the CSS on the slopeusing the PSO each precalculated slip surface can be treatedas a particle The number of searching variables is thedimension of the searching space The FOS function 119865
119911is
Start
Initialize the necessary
Search point in the search area
Yes
No
Change the position of search point
Search point on the boundary of search area
Export
End
Expand search area
Yes
Yes
No
No
parameters Fzm x0xn+1 yc etc
Assign x0min x(n+1)max ycmax etc
Fzm = Fz Fzm gt Fz
Calculate Fz
Figure 3 Flow chart of calculating the minimum FOS
the fitness function Assuming that the searching space is119863-dimension the particle swarm consists of 119873 particles Thelocation of the 119894th particle at the 119905th time step is O119905
119894=
(1198741199051198941 1198741199051198942 119874119905
119894119863) the velocity is V119905
119894= (119881119905
1198941 1198811199051198942 119881119905
119894119863)
Thus the procedure of searching for the CSS of the slope usingPSO can be expressed as follows
(1) Parameter initialization including the swarm size 119873particle locationO119905
119894and velocityV119905
119894 themaximum velocity of
the particle Vmax and maximum iteration step 119905max(2) Examination of the particle location to check if the
geometric condition is satisfied that is to ensure a brokenarc does not occur in the determined slip surface if theconditionswere satisfied the calculationwould enter step (3)otherwise the particle location should be adjusted to satisfythe geometric condition and then enter step (3)
(3) Calculating the fitness function value of each particlesthat is calculating the FOS of each slip surface 119865
119905
119911119894=
119865119911(1198741199051198941 1198741199051198942 119874119905
119894119863)
(4) Comparing the fitness function value of each particle119865119905
119911119894with the corresponding fitness function value at the best
position where the particle passed 119865119911119901119894 if 119865119905119911119894
le 119865119911119901119894 the
particle passed best position of O119901119894= O119905119894and the optimal
Computational Intelligence and Neuroscience 5
fitness function value of the particle 119865119911119901119894
= 119865119905119911119894 otherwise
O119901119894and 119865
119911119901119894maintained the same values
(5) Comparing the fitness function value of each particle119865119905119911119894with the fitness function value at the overall best position
if 119865119905119911119894le 119865119911119892 all particles passed the best position at O
119892= O119905119894
and the overall fitness function value was 119865119911119892= 119865119905119911119894 other-
wiseO119892and 119865
119911119892maintained the same values
(6) According to (15) and (16) the velocity and locationof each particle were updated
V119905+1119894
= 119908V119905119894+ 11988811199031(O119901119894minusO119905119894) + 11988821199032(O119892minusO119905119894)
119881119905+1
119894119895=
119881119905+1119894119895
if 10038161003816100381610038161003816119881119905+1
119894119895
10038161003816100381610038161003816le 119881119895max
119881119905+1119894119895
10038161003816100381610038161003816119881119905+1119894119895
10038161003816100381610038161003816
119881119895max if 10038161003816100381610038161003816119881
119905+1
119894119895
10038161003816100381610038161003816gt 119881119895max
(15)
O119905+1119894
= O119905119894+ V119905+1119894 (16)
where 119894 = 1 2 119873 119895 = 1 2 119863 1198881and 1198882are the
acceleration coefficients with a typical value of 1198881= 1198882= 2
1199031and 1199032are random number in the range of [0 1] 119908 is the
inertial factor which is determined using (17) [27]In (16) when the particle runs out of the searching range
that is 119874119905+1119894119895
gt 119874119895max or 119874
119905+1
119894119895lt 119874119895min the ldquoreflecting wallsrdquo
approach would be used [28] Let 119881119905119894119895= minus119881119905119894119895and119874119905+1
119894119895= 119874119905119894119895minus
119881119905119894119895 Consider
119908 = 119908max minus 119905 times119908max minus 119908min
119905max (17)
where 119908max is initial iteration inertial factor and 119908min is theinertial factor at the final iteration Let119908max = 09119908min = 04[29] 119905max is the maximum iteration step and 119905 is the currentinteraction step
(7) If 119905 lt 1199051 let 119905 = 119905 + 1 Then the procedure steps back
to (2) otherwise it enters the next step(8) If the overall optimal fitness function value satisfies
(18) [30 31] or the iteration 119905 gt 119905max the searching processwould be ended At this point 119865
119911119892is the minimum FOS and
the corresponding slip surface is the CSS Otherwise let 119905 =119905 + 1 119905
1= 1199051+ 119905119888 119865119911119892119900
= 119865119911119892 and the procedure enter step (2)
and the next iteration Consider
10038161003816100381610038161003816119865119911119892119900
minus 119865119911119892
10038161003816100381610038161003816le 120576 (18)
where 119865119911119892119900
and 119865119911119892
are the overall optimal fitness functionvalues at the iteration steps 119905
1and 1199051+ 119905119888 respectively 120576 is the
expected minimum degree of error In (18) after 119905119888iteration
steps the variation of the overall optimal fitness functionvalue becomes small
The detailed procedure is shown in Figure 4Given a swarm size 119873 maximum iteration step 119905max can
be determined through sensitivity analysis [32]
Start
Initialize the necessary parameters
Positions of the particles satisfy geometric
conditions
Yes
Yes
No
No
Calculate fitness value
Change the positions
Export
End
Yes
No
M tc tmax etc
Assign t = 0 t1 = tc
Update Oti V
ti
t lt t1 t = t + 1
t gt tmax or|Fzgo minus Fzg| ⩽ 120576
Fzgo = Fzg
t = t + 1
Identify Opi
Fzgo = 1000 and 120576 = 0001
Og Fzpi and Fzg
t1 = t1 + tc and
Figure 4 Flow chart of the particle swarm optimization
32 Calculation of the Partial Slope FOS It can be seen fromthe geometric relationship in Figure 2 that
119909119888=119910119898119903
2 minus 119910119897119903
2 + 119909119898119903
2 minus 119909119897119903
2
2 (119909119898119903minus 119909119897119903)
minus119910119898119903minus 119910119897119903
119909119898119903minus 119909119897119903
119910119888 (19)
119877 = radic(119909119898119903minus 119909119888)2
+ (119910119888minus 119909119898119903)2
(20)
For a known slope when 119909119897119903and 119909
119898119903are known 119910
119897119903and
119910119898119903
can also be determined If 119910119888were also known 119909
119888and 119877
could be determined through (19) and (20) respectively 119909119897119903
119909119898119903 and 119910
119888can be selected as the searching variables Since
the range of 119909119898119903
and 119909119897119903is known that is 119909
119898le 119909119898119903
le 119909119898+1
and 119909119897le 119909119897119903le 119909119897+1
therefore selecting the value rangefor 119910119888to let 119910
119888le 119910119888max is the only requirement Under this
circumstance solving for the minimum FOS requires solvingthe following constrained nonlinear programming problem
119865119895119898= min119865
119895(119909119898119903 119909119897119903 119910119888)
st 119909119897le 119909119897119903le 119909119897+1
6 Computational Intelligence and Neuroscience
Table 1 Comparison of safety factor calculated by different methods
Number Slope angle (∘) 119867 (m) 119862 (kPa) 120593 (∘) 120574 (kNm3) Method FOS 119909119888(m) 119910
119888(m)
1 390 2100 3000 250 230VMM 123 127 3074PSO 124 125 3072EM 123 129 3071
2 266 135 575 70 173AM1 208 mdash mdashPSO 204 133 212EM 204 134 212
3 184 200 100 200 180AM2 149 164 575PSO 149 163 547EM 149 164 575
4 266 120 290 200 192OM 193 mdash mdashPSO 189 81 201EM 189 81 200
5 266 25 10 266 20GA 133 0 688PSO 131 43 584EM 131 45 580
119909119898le 119909119898119903le 119909119898+1
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(21)
where 0 le 119897 le 119899 minus 2 119897 + 2 le 119898 le 119899 119898 minus 119897 lt 119899 and 119894 =119897 + 1 119897 + 2 119898
The solving method for (21) is the same with that of (13)which is not repeated here For the slope with 119899 points onthe slope surface shown in Figure 2 there are totally 119899(119899 minus1)2 minus 1 possible partial slip surfaces that is there are totally119899(119899 minus 1)2 minus 1 possible values for 119898 and 119897 Equation (21) canbe used to calculate the minimum FOS for each situation
4 Case Study
41 Simple Slope Calculation To validate the calculationmethod for the slope FOS in this study a set of computationalprograms was developed The EM and PSO were used to cal-culate the FOS for 5 simple slopes found in the literatureTheresults were comparedwith those from the literature andwerelisted in Table 1 It should be noted that the FOS of the slopewas calculated using the variablemetricmethod (VMM) [14]analytical method 1 (AM1) [7] analytical method 2 (AM2)[6] ordinary method (OM) [33] and genetic algorithms(GA) [34] reported in the literature
In Table 1 it can be seen that the computational resultsfrom the EM and the PSO are very close to that of othermethods indicating that the computational methods arevalid for calculating the FOS of a slope Taking the first slopeas an example VMM calculated the FOS as 123 while theEM and the PSO in this study were estimated as 123 and124 respectively The result of employing the EM was thatit was more accurate Compared to the EM the error from
0 10 20 30 40 50 60
Iteration
Min
imum
fact
or o
f saf
ety
2035
2040
2045
2050
2055
2060
2065
2070
2075
Figure 5 Minimum FOS versus iterations
the PSO was also small indicating that the PSO is feasible forcalculating the FOS of a slope
In these calculations the step for each searching variablein the EM was 01m the swarm size of PSO of119873 was 20Themaximum iteration 119905max was 100 Under the same conditionssuch as the searching range the total iteration in the EM wasmuch larger than in the PSOWith regard to a large slope theiteration in EM could reach several tens of millions requiringsignificant computation time as shown in Table 2
Therefore compared with the EM the PSO had a smallercomputation error and it also reduced the computation timeIt is a more efficient and accurate method for calculating theFOS of a slope
The swarm size and iteration steps can significantlyaffect the computational results in the PSO To determinethe optimum swarm size and iteration steps this studycalculated several swarm sizes iteration steps and estimatedtheir influence on the convergence speed computation loadand the results
Using the second slope as an example letting119873 = 20 theminimumFOS and location of the particles were investigated
Computational Intelligence and Neuroscience 7
10
20
30
40
50yc
(m)
10
20
30
40
50
yc
(m)
10
20
30
40
50
yc
(m)
t = 1t = 10
10
20
30
40
50
yc
(m)
10
20
30
40
50
minus10 0 10 20 30
xc (m)minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
xc (m)
yc
(m)
10
20
30
40
50
yc
(m)
t = 30
t = 70 t = 100
t = 50
ParticlesGlobal best particle
ParticlesGlobal best particle
xc (m) xc (m)
xc (m) xc (m)
Figure 6 Positions of the particles of different iterations
8 Computational Intelligence and Neuroscience
Table 2 Comparison between EM and PSO
Number Method Iteration Computation time (s)
1 EM 10897394 871068PSO 100 0423
2 EM 73441 5292PSO 100 0423
3 EM 4328958 346002PSO 100 0417
4 EM 892133 70783PSO 100 0411
5 EM 4651688 376618PSO 100 0425
0 25 50 75 100 125 150 175 200
Iteration
Ave
rage
fitn
ess
200
205
210
215
220
225
230
235
240
245
250
N = 5
N = 10
N = 15
N = 20
N = 50
Figure 7 Convergence characteristics of PSO
as the variation in the iteration steps The results of thisanalysis can be seen in Figures 5 and 6 In Figure 5 it appearsthat the FOS of the slope decreased with the increase ofthe iteration and reached the minimum value at the 20thiteration In Figure 6 under the initial condition that is 119905 = 1particles dispersed around the global best particle With theincrease of iterations the particles gradually approached theglobal best particle Although the particles were concentratedin the final computation stage these particles were notclustered in the location of the global best particle which wasprimarily due to the particles being caught in the vicinity ofthe point with the local extreme value in the PSO
Thereafter letting 119905max = 200 this study analyzed theconvergence feature of the PSO with a swarm size 119873 of 510 15 20 and 50 The results are presented in Figure 7 Inthe figure it can be seen that the convergence results weregood for the swarm size of 15 20 and 50 Moreover fordifferent swarm sizes the convergence was attained before100 iterations indicating that the PSO converged quicklyTherefore when using the PSO to calculate the slope FOSselecting 119905max = 100 and 119873 = 20 should satisfy therequirements
1
3
2
20
15
10
5
0
minus5minus10 minus5 0 5 10 15 20 25 30 35
y(m
)
x (m)
A1
A5
Figure 8 Cross section of slope and computation results
20
15
10
5
0
minus5
minus10minus15 minus10 minus5 0 5 10 15 20 25 30 35 40
Method ordinary
Fs = 1145
Figure 9 Results of Swedish circle method
42Multistage Slope Calculation Figure 8 shows amultistageslope with the unit weight 120574 = 20 kNm3 cohesion 119888 =
10 kPa and internal friction angle 120593 = 20∘ Utilizing the PSOthe minimum FOS was calculated to be 1076 and the CSS issurface 1 in Figure 8 In addition two different slip surfaces atcompletely different locationswere calculatedwith the factorsof safety close to theminimumFOS as represented by surfaces3 in Figure 8 Their factors of safety were 1118 and 1156 Ifreinforcement was performed only to slip surface 1 the slopemight slide along surfaces 2 and 3
The overall FOS using the Swedish circle method in thesoftware was calculated to be 1145 as shown in Figure 9
Computational Intelligence and Neuroscience 9
If we used AM2 to calculate the overall FOS of the slopethe slope surface can be assumed to be the line of 119860
11198602
Here the calculated FOS was 1009 and the slip surface wasthe blue dashed line shown in Figure 9 In Figure 9 the redsolid line represents the calculated slip surface employingthe PSO presented in this study It can be seen in Figure 9that the calculated slide-in and slide-out points of the slipsurface calculated using the method presented in this paperprovided a close result to that obtained using the softwareThe calculated FOS 1118 was also close to the calculatedvalue obtained from the software that is 1145 which furthervalidated the accuracy of the method presented in this study
5 Conclusions and Further Research
(1) This paper selected the horizontal coordinate of anintercept between the slip surface and the slope topbottom surface and the vertical coordinate of thecenter of the critical arc as the searching variablesUsing the engineering practice to restrain the valuerange of the searching variables this study trans-formed the problem of solving for the minimumFOS of the slope into solving a constrained nonlinearprogramming problem The EM and the PSO wereeasily programmed to solve this problem
(2) The case study of a simple slope indicated that theEM and the PSO provided results that were close tothose obtained using the other established methodsIn addition the EM provided the better accuracy ofthe two Compared to the EM the PSO also hadsmall computation errors and significantly reducedthe computation load The PSO can efficiently andaccurately calculate the slope FOS
(3) In a case study of a multistage slope the methodpresented in this paper estimated the minimum FOSto be 1076 Two potential slip surfaces were alsocalculated with the factors of safety being 1118 and1156 respectively These proved to be close to theminimumFOS but the locations of these two surfaceswere very different from that of the CSS Thereforereinforcement should be carried out for all threesurfaces
(4) Through multiple calculations it was found that thePSO tended to converge quickly Use of the PSO tocalculate slope FOS with 119905max = 100119873 = 20 usuallysatisfies the computational requirement Howeverwith the PSO the particles could be easily caught atthe points with local extreme values demonstratingthat this technique requires further improvement
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Particular thanks are due to Chongxin Zhang and Yabo Zhoufor their assistance with derivation of equations
References
[1] A J Choobbasti F Farrokhzad and A Barari ldquoPredictionof slope stability using artificial neural network (case studyNoabad Mazandaran Iran)rdquo Arabian Journal of Geosciencesvol 2 no 4 pp 311ndash319 2009
[2] N Vatanpour M Ghafoori and H H Talouki ldquoProbabilisticand sensitivity analyses of effective geotechnical parameters onrock slope stability a case study of an urban area in northeastIranrdquo Natural Hazards vol 71 no 3 pp 1659ndash1678 2014
[3] R Kalatehjari N Ali M Kholghifard and M HajihassanildquoThe effects of method of generating circular slip surfaceson determining the critical slip surface by particle swarmoptimizationrdquo Arabian Journal of Geosciences vol 7 no 4 pp1529ndash1539 2014
[4] D-P Deng and L Li ldquoResearch on calculationmethods of slopestability under two types of sliding surfacerdquo Rock and SoilMechanics vol 34 no 2 pp 372ndash410 2013
[5] T B Zhang Earth Slope Stability Analysis and GeotechnologySlope Design Chengdu University of Science and TechnologyPress Chengdu China 1987
[6] G Y Yang ldquoAnalytical calculation of Fellenius method for soilslope stabilityrdquo Mechanics in Engineering vol 17 no 2 pp 59ndash61 1995
[7] J G Cao and M Z Musharraf ldquoShort communicationsanalytical method for analysis of slope stabilityrdquo InternationalJournal for Numerical and Analytical Methods in Geomechanicsvol 23 no 5 pp 439ndash449 1999
[8] B S Jiang M F Cai and A Z Lu ldquoAnalytical calculation ofslope stabilityrdquoChinese Journal of RockMechanics and Engineer-ing vol 23 no 16 pp 2726ndash2729 2004
[9] B S Jiang M F Cai and H Du ldquoAnalytical calculation onstability of slope with planar failure surfacerdquo Chinese Journal ofRock Mechanics and Engineering vol 23 no 1 pp 91ndash94 2004
[10] Y M Cheng T Lansivaara and W B Wei ldquoTwo-dimensionalslope stability analysis by limit equilibrium and strength reduc-tion methodsrdquo Computers and Geotechnics vol 34 no 3 pp137ndash150 2007
[11] P Cao K Zhang Y X Wang and H H Hu ldquoMixed searchalgorithm of critical slip surface of complex sloperdquo ChineseJournal of Rock Mechanics and Engineering vol 29 no 4 pp814ndash821 2010
[12] Z Z Ma H W Qi and X Y Hou ldquoA new roundly searchmethod for slope stability checkingrdquo Rock and Soil Mechanicsvol 21 no 3 pp 256ndash259 2000
[13] W H Lv H H Zhu and X J Li ldquoGA-based generalizedslope stability analysis methodrdquo Chinese Journal of GeotechnicalEngineering vol 27 no 5 pp 595ndash599 2005
[14] Z B Liu and Z H Wang ldquoMethod of determinating thelocation of center of critical circular failure surfacerdquo Journal ofChina Coal Society vol 22 no 6 pp 612ndash616 1997
[15] X-R Zhu Y-J Zhu and X-L Yao ldquoFinding globally criticalsurface by optimization method based on soil slope face gridsrdquoRock and Soil Mechanics vol 27 no 2 pp 252ndash256 2006
[16] Z Y Chen ldquoRandom trials used in determining global mini-mum factors of safety of slopesrdquoCanadianGeotechnical Journalvol 29 no 2 pp 225ndash233 1992
10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

2 Computational Intelligence and Neuroscience
analyzing slopes with complex surface while other methodsusually require a search of the variables to perform a pre-calculation In this regard there are currently three typicalselection methods for variable searching (1) the horizontalcoordinate 119909
119888 vertical coordinate 119910
119888of the center of critical
circular arc and the radius 119877 [19 20] (2) the horizontalcoordinates of the intercepts of the slip surface with a slopetop and bottom surfaces that is 119909
119906and 119909
119887 and the vertical
coordinate of the center of critical circular arc 119910119888[21] (3)
the horizontal coordinates of the intercepts of the slip surfacewith the slope top and bottom surfaces and the arc height ℎ
119886
[22] or the horizontal coordinate of the intercept between the119909-axis and the tangent that is at the intercept between the slipsurface and the slope top 119909
119905
In the first method the range of 119909119888 119910119888 and 119877 is deter-
mined empirically Unreasonable ranges can lead to a missedoptimum solution In the second method determination ofthe range of the three parameters119909
119906119909119887 and119910
119888is also needed
But the location of the intercept between the slip surfaceand slope top and bottom is easily controlled and the rangeof 119909119906and 119909
119887is relatively easy to determine In the third
method the range of 119909119906and 119909
119887needs to be estimated and
the range of ℎ119886or 119909119905is known Although the range of ℎ
119886or
119909119905does not need to be estimated the variation of ℎ
119886or 119909119905
corresponds to the variation of 119877 For instance the varyingrange of ℎ
119886is from ℎ
119886max to zero which corresponds to therange if 119877 would be from 119877min to an infinitely large valuewhich is essentially equivalent to selecting 119877 as the searchingvariable and letting its range be [119877min +infin] Therefore thisapproach does not improve the performance of the firstmethod but increases the search range considerably whichadds unnecessary searching Although there is no essentialdifference among these three methods the second methodselects relatively direct searching variables and the range isfairly easy to control
This paper utilized the concept of these described integralmethods and derived the integral expression equation of theFOS for a homogenous slope with complex slope geometryThis study used the second method to select searchingvariables and applied an EM and PSO to solve for theminimum FOS Using the method presented in this paperthe minimum FOS of a homogenous slope can be effectivelycalculated The CSS as well as other potential slip surfacescan be identified which provides a scientific basis for slopesupport
2 Derivation of the Integral ExpressionEquation for Slope FOS
21 Integral Expression Equation for the Overall Slope FOSFor a slope with complex geometry the line of the slopesurface can be assumed to consist of several component lines[23] For the slope shown in Figure 1 the slope surface iscomposed of 119899 minus 1 lines 119860
11198602 11986021198603 119860
119899minus1119860119899 The slope
is assumed to be a homogenous slope and the surfaces of theslopersquos top and bottomare planesMoreover it is also assumedthat there is no effect of slope loading or groundwaterinfluenceTheheight of slope is119867 the unit weight of the slope
C
y
x
H
dxx
dW
dNdT
dR
h
R
middot middot middot
120572
An
Anminus1
An+1
A0 A1
A2
Figure 1 Coordinate system for the slopes stability analysis andforces acting on differential slices
soil is 120574 the internal friction angle is 120593 and the cohesion is 119888The coordinate system is established with the origin selectedat the toe of slope 119860
1 shown in Figure 1 Let the radius of
the critical arc be 119877 and the center of the arc 119862(119909119888 119910119888) The
intercepts between the slip surface and the surfaces of slopersquostop and bottom are119860
119899+1and119860
0 respectivelyThe coordinate
of 119860119894is (119909119894 119910119894) (119894 = 0 1 2 119899 + 1) thus 119910
0= 0 119909
1= 0
1199101= 0 119910
119899= 119867 and 119910
119899+1= 119867
Assuming the equation for line 119860119894119860119894+1
119910119909119894= 119896119894119909 + 119887119894 119909119894le 119909 le 119909
119894+1 (1)
where
119896119894=119910119894+1
minus 119910119894
119909119894+1
minus 119909119894
119887119894=119910119894119909119894+1
minus 119910119894+1119909119894
119909119894+1
minus 119909119894
(119909119894= 119909119894+1) 119894 = 0 1 2 119899
(2)
The equation for arc 1198600119860119899+1
was
119910119886= 119910119888minus radic1198772 minus (119909 minus 119909
119888)2
1199090le 119909 le 119909
119899+1 (3)
For the infinitely small slide bar the width was assumedto be 119889119909 and the height was ℎ thus
ℎ = 119910119909119894minus 119910119886 119909119894le 119909 le 119909
119894+1 (4)
The weight of slide bar 119889119882 = 120574ℎ119889119909 Antislide force anddownslide force were
119889119877 = 119888sec120572119889119909 + 120574ℎ tan120593 cos120572119889119909
119889119879 = 120574ℎ sin120572119889119909(5)
where sin120572 = (119909 minus 119909119888)119877
The FOS 119865 of the slope is the ratio of the torque at thecenter of arc 119862 between all antislide forces and downslideforces thus the overall FOS of the slope was
119865119911=119872119903119911
119872119904119911
=119888119868119903119911+ 120574 tan120593119868
119888119911
120574119868119904119911
(6)
Computational Intelligence and Neuroscience 3
According to (1)ndash(5) the integration yielded
119868119903119911= int119909119899+1
1199090
119877sec120572119889119909 = 1198772 (120575119899+1
minus 1205750)
119868119888119911=
119899
sum119894=0
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) cos120572119889119909
= 119875119899+1
minus 1198750+
119899
sum119894=0
[1
3119896119894(119878119894
3
minus 119878119894+1
3
)
+1
2(119896119894119909119888+ 119887119894minus 119910119888) (119879119894+1
minus 119879119894)]
119868119904119911=
119899
sum119894=0
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) sin120572119889119909
=1
31198780
3
minus1
3119878119899+1
3
+
119899
sum119894=0
119882119894
(7)
where
120575119894= arcsin(
119909119894minus 119909119888
119877) 119878
119894= radic1198772 minus (119909
119894minus 119909119888)2
119879119894= (119909119894minus 119909119888) 119878119894+ 1198772
120575119894 119875
119894= 1198772
119909119894minus1
3(119909119894minus 119909119888)3
119882119894=1
3119896119894(119909119894+1
3
minus 119909119894
3
) +1
2(119887119894minus 119896119894119909119888minus 119910119888) (119909119894+1
2
minus 119909119894
2
)
+ 119909119888(119910119888minus 119887119894) (119909119894+1
minus 119909119894)
(119894 = 0 1 2 119899)
(8)
When 119909119894= 119909119894+1
the line equation was 119909 = 119909119894 119910119894le 119910 le
119910119894+1
the corresponding integral in the range of this linewouldbe zero
22 Integral Expression Equation for the Partial Slope FOSFigure 2 shows that the slip surface intercepts with theslope surface Assuming that top and bottom intercepts havecoordinates of (119909
119898119903 119910119898119903) and (119909
119897119903 119910119897119903) thus 119909
119897le 119909119897119903
le
119909119897+1
(0 le 119897 le 119899 minus 2) 119909119898le 119909119898119903
le 119909119898+1
(119897 + 2 le 119898 le 119899in addition119898 lt 119899 when 119897 = 0)
According to (1)ndash(5) the partial FOS can be obtainedthrough integration
119865119895=119872119903119895
119872119904119895
=119888119868119903119895+ 120574 tan120593119868
119888119895
120574119868119904119895
(9)
y
0
D
R
H
x
AnAmr
Am
xlr xmr
middot middot middot
middot middot middot
Al
A1
C(xc yc)
Figure 2 Sketch of slopes partial stability analysis
where
119868119903119895= int119909119898+1
119909119897
119877sec120572119889119909 = 1198772 (120575119898+1
minus 120575119897)
119868119888119895=
119898
sum119894=119897
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) cos120572119889119909
= 119875119898+1
minus 119875119897+
119898
sum119894=119897
[1
3119896119894(119878119894
3
minus 119878119894+1
3
)
+1
2(119896119894119909119888+ 119887119894minus 119910119888) (119879119894+1
minus 119879119894)]
119868119904119895=
119898
sum119894=119897
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) sin120572119889119909
=1
3119878119897
3
minus1
3119878119898+1
3
+
119898
sum119894=119897
119882119894
(10)
where 119909119898+1
= 119909119898119903
in 120575119898+1
119878119898+1
119879119898+1
119875119898+1
and 119882119898and
119909119897= 119909119897119903in 120575119897 119878119897 119879119897 119875119897 and119882
119897
3 Calculation of Slope FOS
31 Calculation of Overall Slope FOS Equations (7) weresubstituted into (6) Equations (10) were substituted into(16) For the known slope its FOS 119865 is the function of thehorizontal and vertical coordinates of the center of the criticalarc 119909
119888and 119910
119888 as well as the radius 119877 However it is difficult
to obtain the minimum value of this function using theanalytical methodThe selection of the searching variable forthe precalculation is needed to solve the problem
From the geometrical relationship in Figure 1 it is knownthat
119909119888=1198672 + 119909
119899+1
2 minus 1199090
2
2 (119909119899+1
minus 1199090)
minus119867119910119888
119909119899+1
minus 1199090
(11)
119877 = radic(119909119899+1
minus 119909119888)2
+ (119910119888minus 119867)2
(12)
For a known slope when 1199090 119909119899+1
and 119910119888are determined
119909119888and 119877 can be determined using (11) and (12) respectively
4 Computational Intelligence and Neuroscience
that is the CSS can be obtained Therefore 1199090 119909119899+1
and119910119888can be selected as the searching variables in which
119909119899+1
ge 119909119899 1199090
le 0 To reduce the searching range arestrained range of value of 119909
0 119909119899+1
119910119888should be empirically
evaluated to ensure that 119910119888le 119910119888max 1199090 ge 119909
0min 119909119899+1 ge119909(119899+1)max In addition to avoid occurrence of a broken arcradic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877 (119894 = 1 2 119899) should be sat-isfied Under this circumstance solving for the minimumFOS requires solving the following constrained nonlinearprogramming problem
119865119911119898
= min119865119911(1199090 119909119899+1 119910119888)
st 1199090min le 1199090 le 0
119909119899le 119909119899+1
le 119909(119899+1)max
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(119894 = 1 2 119899)
(13)
When the determined critical circular arc center is on theboundary of the search region such as 119910
119888= 119910119888max 1199090 =
1199090min or 119909119899+1 = 119909
(119899+1)max the searching region should beexpanded accordingly Otherwise this could result inmissingthe optimum solution due to the small range of the valueTaking 119910
119888max as an example when the vertical coordinateof the critical arc center 119910
119888= 119910119888max (14) can be used for
adjustment Consider
119910119888max = (1 + 120582) 119910119888max (14)
where 120582 is a coefficientThis study applied an EMand PSO to solve (13)The result
yielded from the EM was compared in order to validate theresult of the PSO
311 Exhaustive Method The EM is a method that allowsthe range of 119909
0 119909119899+1
and 119910119888to vary according to a specified
step interval The FOS 119865119911should be solved at every step
for each value in which the minimum value would be theminimum FOS 119865
119911119898 The detailed solving procedure is shown
in Figure 3 This procedure can be easily carried out using aset of programmed computer codes
312 Particle Swarm Optimization Algorithm The PSO isa swarm intelligent heuristic algorithm that was proposedby Dr Eberhart and Dr Kennedy [24] It utilizes individualcoordination and information sharing in the swarm to seekthe optimum solution through iteration The concept ofPSO is simple There are few adjusting parameters and theconvergence speed is fast so it has been widely used indiscrete and continuous optimization problems [25 26]
During the searching process of the CSS on the slopeusing the PSO each precalculated slip surface can be treatedas a particle The number of searching variables is thedimension of the searching space The FOS function 119865
119911is
Start
Initialize the necessary
Search point in the search area
Yes
No
Change the position of search point
Search point on the boundary of search area
Export
End
Expand search area
Yes
Yes
No
No
parameters Fzm x0xn+1 yc etc
Assign x0min x(n+1)max ycmax etc
Fzm = Fz Fzm gt Fz
Calculate Fz
Figure 3 Flow chart of calculating the minimum FOS
the fitness function Assuming that the searching space is119863-dimension the particle swarm consists of 119873 particles Thelocation of the 119894th particle at the 119905th time step is O119905
119894=
(1198741199051198941 1198741199051198942 119874119905
119894119863) the velocity is V119905
119894= (119881119905
1198941 1198811199051198942 119881119905
119894119863)
Thus the procedure of searching for the CSS of the slope usingPSO can be expressed as follows
(1) Parameter initialization including the swarm size 119873particle locationO119905
119894and velocityV119905
119894 themaximum velocity of
the particle Vmax and maximum iteration step 119905max(2) Examination of the particle location to check if the
geometric condition is satisfied that is to ensure a brokenarc does not occur in the determined slip surface if theconditionswere satisfied the calculationwould enter step (3)otherwise the particle location should be adjusted to satisfythe geometric condition and then enter step (3)
(3) Calculating the fitness function value of each particlesthat is calculating the FOS of each slip surface 119865
119905
119911119894=
119865119911(1198741199051198941 1198741199051198942 119874119905
119894119863)
(4) Comparing the fitness function value of each particle119865119905
119911119894with the corresponding fitness function value at the best
position where the particle passed 119865119911119901119894 if 119865119905119911119894
le 119865119911119901119894 the
particle passed best position of O119901119894= O119905119894and the optimal
Computational Intelligence and Neuroscience 5
fitness function value of the particle 119865119911119901119894
= 119865119905119911119894 otherwise
O119901119894and 119865
119911119901119894maintained the same values
(5) Comparing the fitness function value of each particle119865119905119911119894with the fitness function value at the overall best position
if 119865119905119911119894le 119865119911119892 all particles passed the best position at O
119892= O119905119894
and the overall fitness function value was 119865119911119892= 119865119905119911119894 other-
wiseO119892and 119865
119911119892maintained the same values
(6) According to (15) and (16) the velocity and locationof each particle were updated
V119905+1119894
= 119908V119905119894+ 11988811199031(O119901119894minusO119905119894) + 11988821199032(O119892minusO119905119894)
119881119905+1
119894119895=
119881119905+1119894119895
if 10038161003816100381610038161003816119881119905+1
119894119895
10038161003816100381610038161003816le 119881119895max
119881119905+1119894119895
10038161003816100381610038161003816119881119905+1119894119895
10038161003816100381610038161003816
119881119895max if 10038161003816100381610038161003816119881
119905+1
119894119895
10038161003816100381610038161003816gt 119881119895max
(15)
O119905+1119894
= O119905119894+ V119905+1119894 (16)
where 119894 = 1 2 119873 119895 = 1 2 119863 1198881and 1198882are the
acceleration coefficients with a typical value of 1198881= 1198882= 2
1199031and 1199032are random number in the range of [0 1] 119908 is the
inertial factor which is determined using (17) [27]In (16) when the particle runs out of the searching range
that is 119874119905+1119894119895
gt 119874119895max or 119874
119905+1
119894119895lt 119874119895min the ldquoreflecting wallsrdquo
approach would be used [28] Let 119881119905119894119895= minus119881119905119894119895and119874119905+1
119894119895= 119874119905119894119895minus
119881119905119894119895 Consider
119908 = 119908max minus 119905 times119908max minus 119908min
119905max (17)
where 119908max is initial iteration inertial factor and 119908min is theinertial factor at the final iteration Let119908max = 09119908min = 04[29] 119905max is the maximum iteration step and 119905 is the currentinteraction step
(7) If 119905 lt 1199051 let 119905 = 119905 + 1 Then the procedure steps back
to (2) otherwise it enters the next step(8) If the overall optimal fitness function value satisfies
(18) [30 31] or the iteration 119905 gt 119905max the searching processwould be ended At this point 119865
119911119892is the minimum FOS and
the corresponding slip surface is the CSS Otherwise let 119905 =119905 + 1 119905
1= 1199051+ 119905119888 119865119911119892119900
= 119865119911119892 and the procedure enter step (2)
and the next iteration Consider
10038161003816100381610038161003816119865119911119892119900
minus 119865119911119892
10038161003816100381610038161003816le 120576 (18)
where 119865119911119892119900
and 119865119911119892
are the overall optimal fitness functionvalues at the iteration steps 119905
1and 1199051+ 119905119888 respectively 120576 is the
expected minimum degree of error In (18) after 119905119888iteration
steps the variation of the overall optimal fitness functionvalue becomes small
The detailed procedure is shown in Figure 4Given a swarm size 119873 maximum iteration step 119905max can
be determined through sensitivity analysis [32]
Start
Initialize the necessary parameters
Positions of the particles satisfy geometric
conditions
Yes
Yes
No
No
Calculate fitness value
Change the positions
Export
End
Yes
No
M tc tmax etc
Assign t = 0 t1 = tc
Update Oti V
ti
t lt t1 t = t + 1
t gt tmax or|Fzgo minus Fzg| ⩽ 120576
Fzgo = Fzg
t = t + 1
Identify Opi
Fzgo = 1000 and 120576 = 0001
Og Fzpi and Fzg
t1 = t1 + tc and
Figure 4 Flow chart of the particle swarm optimization
32 Calculation of the Partial Slope FOS It can be seen fromthe geometric relationship in Figure 2 that
119909119888=119910119898119903
2 minus 119910119897119903
2 + 119909119898119903
2 minus 119909119897119903
2
2 (119909119898119903minus 119909119897119903)
minus119910119898119903minus 119910119897119903
119909119898119903minus 119909119897119903
119910119888 (19)
119877 = radic(119909119898119903minus 119909119888)2
+ (119910119888minus 119909119898119903)2
(20)
For a known slope when 119909119897119903and 119909
119898119903are known 119910
119897119903and
119910119898119903
can also be determined If 119910119888were also known 119909
119888and 119877
could be determined through (19) and (20) respectively 119909119897119903
119909119898119903 and 119910
119888can be selected as the searching variables Since
the range of 119909119898119903
and 119909119897119903is known that is 119909
119898le 119909119898119903
le 119909119898+1
and 119909119897le 119909119897119903le 119909119897+1
therefore selecting the value rangefor 119910119888to let 119910
119888le 119910119888max is the only requirement Under this
circumstance solving for the minimum FOS requires solvingthe following constrained nonlinear programming problem
119865119895119898= min119865
119895(119909119898119903 119909119897119903 119910119888)
st 119909119897le 119909119897119903le 119909119897+1
6 Computational Intelligence and Neuroscience
Table 1 Comparison of safety factor calculated by different methods
Number Slope angle (∘) 119867 (m) 119862 (kPa) 120593 (∘) 120574 (kNm3) Method FOS 119909119888(m) 119910
119888(m)
1 390 2100 3000 250 230VMM 123 127 3074PSO 124 125 3072EM 123 129 3071
2 266 135 575 70 173AM1 208 mdash mdashPSO 204 133 212EM 204 134 212
3 184 200 100 200 180AM2 149 164 575PSO 149 163 547EM 149 164 575
4 266 120 290 200 192OM 193 mdash mdashPSO 189 81 201EM 189 81 200
5 266 25 10 266 20GA 133 0 688PSO 131 43 584EM 131 45 580
119909119898le 119909119898119903le 119909119898+1
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(21)
where 0 le 119897 le 119899 minus 2 119897 + 2 le 119898 le 119899 119898 minus 119897 lt 119899 and 119894 =119897 + 1 119897 + 2 119898
The solving method for (21) is the same with that of (13)which is not repeated here For the slope with 119899 points onthe slope surface shown in Figure 2 there are totally 119899(119899 minus1)2 minus 1 possible partial slip surfaces that is there are totally119899(119899 minus 1)2 minus 1 possible values for 119898 and 119897 Equation (21) canbe used to calculate the minimum FOS for each situation
4 Case Study
41 Simple Slope Calculation To validate the calculationmethod for the slope FOS in this study a set of computationalprograms was developed The EM and PSO were used to cal-culate the FOS for 5 simple slopes found in the literatureTheresults were comparedwith those from the literature andwerelisted in Table 1 It should be noted that the FOS of the slopewas calculated using the variablemetricmethod (VMM) [14]analytical method 1 (AM1) [7] analytical method 2 (AM2)[6] ordinary method (OM) [33] and genetic algorithms(GA) [34] reported in the literature
In Table 1 it can be seen that the computational resultsfrom the EM and the PSO are very close to that of othermethods indicating that the computational methods arevalid for calculating the FOS of a slope Taking the first slopeas an example VMM calculated the FOS as 123 while theEM and the PSO in this study were estimated as 123 and124 respectively The result of employing the EM was thatit was more accurate Compared to the EM the error from
0 10 20 30 40 50 60
Iteration
Min
imum
fact
or o
f saf
ety
2035
2040
2045
2050
2055
2060
2065
2070
2075
Figure 5 Minimum FOS versus iterations
the PSO was also small indicating that the PSO is feasible forcalculating the FOS of a slope
In these calculations the step for each searching variablein the EM was 01m the swarm size of PSO of119873 was 20Themaximum iteration 119905max was 100 Under the same conditionssuch as the searching range the total iteration in the EM wasmuch larger than in the PSOWith regard to a large slope theiteration in EM could reach several tens of millions requiringsignificant computation time as shown in Table 2
Therefore compared with the EM the PSO had a smallercomputation error and it also reduced the computation timeIt is a more efficient and accurate method for calculating theFOS of a slope
The swarm size and iteration steps can significantlyaffect the computational results in the PSO To determinethe optimum swarm size and iteration steps this studycalculated several swarm sizes iteration steps and estimatedtheir influence on the convergence speed computation loadand the results
Using the second slope as an example letting119873 = 20 theminimumFOS and location of the particles were investigated
Computational Intelligence and Neuroscience 7
10
20
30
40
50yc
(m)
10
20
30
40
50
yc
(m)
10
20
30
40
50
yc
(m)
t = 1t = 10
10
20
30
40
50
yc
(m)
10
20
30
40
50
minus10 0 10 20 30
xc (m)minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
xc (m)
yc
(m)
10
20
30
40
50
yc
(m)
t = 30
t = 70 t = 100
t = 50
ParticlesGlobal best particle
ParticlesGlobal best particle
xc (m) xc (m)
xc (m) xc (m)
Figure 6 Positions of the particles of different iterations
8 Computational Intelligence and Neuroscience
Table 2 Comparison between EM and PSO
Number Method Iteration Computation time (s)
1 EM 10897394 871068PSO 100 0423
2 EM 73441 5292PSO 100 0423
3 EM 4328958 346002PSO 100 0417
4 EM 892133 70783PSO 100 0411
5 EM 4651688 376618PSO 100 0425
0 25 50 75 100 125 150 175 200
Iteration
Ave
rage
fitn
ess
200
205
210
215
220
225
230
235
240
245
250
N = 5
N = 10
N = 15
N = 20
N = 50
Figure 7 Convergence characteristics of PSO
as the variation in the iteration steps The results of thisanalysis can be seen in Figures 5 and 6 In Figure 5 it appearsthat the FOS of the slope decreased with the increase ofthe iteration and reached the minimum value at the 20thiteration In Figure 6 under the initial condition that is 119905 = 1particles dispersed around the global best particle With theincrease of iterations the particles gradually approached theglobal best particle Although the particles were concentratedin the final computation stage these particles were notclustered in the location of the global best particle which wasprimarily due to the particles being caught in the vicinity ofthe point with the local extreme value in the PSO
Thereafter letting 119905max = 200 this study analyzed theconvergence feature of the PSO with a swarm size 119873 of 510 15 20 and 50 The results are presented in Figure 7 Inthe figure it can be seen that the convergence results weregood for the swarm size of 15 20 and 50 Moreover fordifferent swarm sizes the convergence was attained before100 iterations indicating that the PSO converged quicklyTherefore when using the PSO to calculate the slope FOSselecting 119905max = 100 and 119873 = 20 should satisfy therequirements
1
3
2
20
15
10
5
0
minus5minus10 minus5 0 5 10 15 20 25 30 35
y(m
)
x (m)
A1
A5
Figure 8 Cross section of slope and computation results
20
15
10
5
0
minus5
minus10minus15 minus10 minus5 0 5 10 15 20 25 30 35 40
Method ordinary
Fs = 1145
Figure 9 Results of Swedish circle method
42Multistage Slope Calculation Figure 8 shows amultistageslope with the unit weight 120574 = 20 kNm3 cohesion 119888 =
10 kPa and internal friction angle 120593 = 20∘ Utilizing the PSOthe minimum FOS was calculated to be 1076 and the CSS issurface 1 in Figure 8 In addition two different slip surfaces atcompletely different locationswere calculatedwith the factorsof safety close to theminimumFOS as represented by surfaces3 in Figure 8 Their factors of safety were 1118 and 1156 Ifreinforcement was performed only to slip surface 1 the slopemight slide along surfaces 2 and 3
The overall FOS using the Swedish circle method in thesoftware was calculated to be 1145 as shown in Figure 9
Computational Intelligence and Neuroscience 9
If we used AM2 to calculate the overall FOS of the slopethe slope surface can be assumed to be the line of 119860
11198602
Here the calculated FOS was 1009 and the slip surface wasthe blue dashed line shown in Figure 9 In Figure 9 the redsolid line represents the calculated slip surface employingthe PSO presented in this study It can be seen in Figure 9that the calculated slide-in and slide-out points of the slipsurface calculated using the method presented in this paperprovided a close result to that obtained using the softwareThe calculated FOS 1118 was also close to the calculatedvalue obtained from the software that is 1145 which furthervalidated the accuracy of the method presented in this study
5 Conclusions and Further Research
(1) This paper selected the horizontal coordinate of anintercept between the slip surface and the slope topbottom surface and the vertical coordinate of thecenter of the critical arc as the searching variablesUsing the engineering practice to restrain the valuerange of the searching variables this study trans-formed the problem of solving for the minimumFOS of the slope into solving a constrained nonlinearprogramming problem The EM and the PSO wereeasily programmed to solve this problem
(2) The case study of a simple slope indicated that theEM and the PSO provided results that were close tothose obtained using the other established methodsIn addition the EM provided the better accuracy ofthe two Compared to the EM the PSO also hadsmall computation errors and significantly reducedthe computation load The PSO can efficiently andaccurately calculate the slope FOS
(3) In a case study of a multistage slope the methodpresented in this paper estimated the minimum FOSto be 1076 Two potential slip surfaces were alsocalculated with the factors of safety being 1118 and1156 respectively These proved to be close to theminimumFOS but the locations of these two surfaceswere very different from that of the CSS Thereforereinforcement should be carried out for all threesurfaces
(4) Through multiple calculations it was found that thePSO tended to converge quickly Use of the PSO tocalculate slope FOS with 119905max = 100119873 = 20 usuallysatisfies the computational requirement Howeverwith the PSO the particles could be easily caught atthe points with local extreme values demonstratingthat this technique requires further improvement
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Particular thanks are due to Chongxin Zhang and Yabo Zhoufor their assistance with derivation of equations
References
[1] A J Choobbasti F Farrokhzad and A Barari ldquoPredictionof slope stability using artificial neural network (case studyNoabad Mazandaran Iran)rdquo Arabian Journal of Geosciencesvol 2 no 4 pp 311ndash319 2009
[2] N Vatanpour M Ghafoori and H H Talouki ldquoProbabilisticand sensitivity analyses of effective geotechnical parameters onrock slope stability a case study of an urban area in northeastIranrdquo Natural Hazards vol 71 no 3 pp 1659ndash1678 2014
[3] R Kalatehjari N Ali M Kholghifard and M HajihassanildquoThe effects of method of generating circular slip surfaceson determining the critical slip surface by particle swarmoptimizationrdquo Arabian Journal of Geosciences vol 7 no 4 pp1529ndash1539 2014
[4] D-P Deng and L Li ldquoResearch on calculationmethods of slopestability under two types of sliding surfacerdquo Rock and SoilMechanics vol 34 no 2 pp 372ndash410 2013
[5] T B Zhang Earth Slope Stability Analysis and GeotechnologySlope Design Chengdu University of Science and TechnologyPress Chengdu China 1987
[6] G Y Yang ldquoAnalytical calculation of Fellenius method for soilslope stabilityrdquo Mechanics in Engineering vol 17 no 2 pp 59ndash61 1995
[7] J G Cao and M Z Musharraf ldquoShort communicationsanalytical method for analysis of slope stabilityrdquo InternationalJournal for Numerical and Analytical Methods in Geomechanicsvol 23 no 5 pp 439ndash449 1999
[8] B S Jiang M F Cai and A Z Lu ldquoAnalytical calculation ofslope stabilityrdquoChinese Journal of RockMechanics and Engineer-ing vol 23 no 16 pp 2726ndash2729 2004
[9] B S Jiang M F Cai and H Du ldquoAnalytical calculation onstability of slope with planar failure surfacerdquo Chinese Journal ofRock Mechanics and Engineering vol 23 no 1 pp 91ndash94 2004
[10] Y M Cheng T Lansivaara and W B Wei ldquoTwo-dimensionalslope stability analysis by limit equilibrium and strength reduc-tion methodsrdquo Computers and Geotechnics vol 34 no 3 pp137ndash150 2007
[11] P Cao K Zhang Y X Wang and H H Hu ldquoMixed searchalgorithm of critical slip surface of complex sloperdquo ChineseJournal of Rock Mechanics and Engineering vol 29 no 4 pp814ndash821 2010
[12] Z Z Ma H W Qi and X Y Hou ldquoA new roundly searchmethod for slope stability checkingrdquo Rock and Soil Mechanicsvol 21 no 3 pp 256ndash259 2000
[13] W H Lv H H Zhu and X J Li ldquoGA-based generalizedslope stability analysis methodrdquo Chinese Journal of GeotechnicalEngineering vol 27 no 5 pp 595ndash599 2005
[14] Z B Liu and Z H Wang ldquoMethod of determinating thelocation of center of critical circular failure surfacerdquo Journal ofChina Coal Society vol 22 no 6 pp 612ndash616 1997
[15] X-R Zhu Y-J Zhu and X-L Yao ldquoFinding globally criticalsurface by optimization method based on soil slope face gridsrdquoRock and Soil Mechanics vol 27 no 2 pp 252ndash256 2006
[16] Z Y Chen ldquoRandom trials used in determining global mini-mum factors of safety of slopesrdquoCanadianGeotechnical Journalvol 29 no 2 pp 225ndash233 1992
10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

Computational Intelligence and Neuroscience 3
According to (1)ndash(5) the integration yielded
119868119903119911= int119909119899+1
1199090
119877sec120572119889119909 = 1198772 (120575119899+1
minus 1205750)
119868119888119911=
119899
sum119894=0
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) cos120572119889119909
= 119875119899+1
minus 1198750+
119899
sum119894=0
[1
3119896119894(119878119894
3
minus 119878119894+1
3
)
+1
2(119896119894119909119888+ 119887119894minus 119910119888) (119879119894+1
minus 119879119894)]
119868119904119911=
119899
sum119894=0
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) sin120572119889119909
=1
31198780
3
minus1
3119878119899+1
3
+
119899
sum119894=0
119882119894
(7)
where
120575119894= arcsin(
119909119894minus 119909119888
119877) 119878
119894= radic1198772 minus (119909
119894minus 119909119888)2
119879119894= (119909119894minus 119909119888) 119878119894+ 1198772
120575119894 119875
119894= 1198772
119909119894minus1
3(119909119894minus 119909119888)3
119882119894=1
3119896119894(119909119894+1
3
minus 119909119894
3
) +1
2(119887119894minus 119896119894119909119888minus 119910119888) (119909119894+1
2
minus 119909119894
2
)
+ 119909119888(119910119888minus 119887119894) (119909119894+1
minus 119909119894)
(119894 = 0 1 2 119899)
(8)
When 119909119894= 119909119894+1
the line equation was 119909 = 119909119894 119910119894le 119910 le
119910119894+1
the corresponding integral in the range of this linewouldbe zero
22 Integral Expression Equation for the Partial Slope FOSFigure 2 shows that the slip surface intercepts with theslope surface Assuming that top and bottom intercepts havecoordinates of (119909
119898119903 119910119898119903) and (119909
119897119903 119910119897119903) thus 119909
119897le 119909119897119903
le
119909119897+1
(0 le 119897 le 119899 minus 2) 119909119898le 119909119898119903
le 119909119898+1
(119897 + 2 le 119898 le 119899in addition119898 lt 119899 when 119897 = 0)
According to (1)ndash(5) the partial FOS can be obtainedthrough integration
119865119895=119872119903119895
119872119904119895
=119888119868119903119895+ 120574 tan120593119868
119888119895
120574119868119904119895
(9)
y
0
D
R
H
x
AnAmr
Am
xlr xmr
middot middot middot
middot middot middot
Al
A1
C(xc yc)
Figure 2 Sketch of slopes partial stability analysis
where
119868119903119895= int119909119898+1
119909119897
119877sec120572119889119909 = 1198772 (120575119898+1
minus 120575119897)
119868119888119895=
119898
sum119894=119897
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) cos120572119889119909
= 119875119898+1
minus 119875119897+
119898
sum119894=119897
[1
3119896119894(119878119894
3
minus 119878119894+1
3
)
+1
2(119896119894119909119888+ 119887119894minus 119910119888) (119879119894+1
minus 119879119894)]
119868119904119895=
119898
sum119894=119897
int119909119894+1
119909119894
119877 (119910119909119894minus 119910119886) sin120572119889119909
=1
3119878119897
3
minus1
3119878119898+1
3
+
119898
sum119894=119897
119882119894
(10)
where 119909119898+1
= 119909119898119903
in 120575119898+1
119878119898+1
119879119898+1
119875119898+1
and 119882119898and
119909119897= 119909119897119903in 120575119897 119878119897 119879119897 119875119897 and119882
119897
3 Calculation of Slope FOS
31 Calculation of Overall Slope FOS Equations (7) weresubstituted into (6) Equations (10) were substituted into(16) For the known slope its FOS 119865 is the function of thehorizontal and vertical coordinates of the center of the criticalarc 119909
119888and 119910
119888 as well as the radius 119877 However it is difficult
to obtain the minimum value of this function using theanalytical methodThe selection of the searching variable forthe precalculation is needed to solve the problem
From the geometrical relationship in Figure 1 it is knownthat
119909119888=1198672 + 119909
119899+1
2 minus 1199090
2
2 (119909119899+1
minus 1199090)
minus119867119910119888
119909119899+1
minus 1199090
(11)
119877 = radic(119909119899+1
minus 119909119888)2
+ (119910119888minus 119867)2
(12)
For a known slope when 1199090 119909119899+1
and 119910119888are determined
119909119888and 119877 can be determined using (11) and (12) respectively
4 Computational Intelligence and Neuroscience
that is the CSS can be obtained Therefore 1199090 119909119899+1
and119910119888can be selected as the searching variables in which
119909119899+1
ge 119909119899 1199090
le 0 To reduce the searching range arestrained range of value of 119909
0 119909119899+1
119910119888should be empirically
evaluated to ensure that 119910119888le 119910119888max 1199090 ge 119909
0min 119909119899+1 ge119909(119899+1)max In addition to avoid occurrence of a broken arcradic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877 (119894 = 1 2 119899) should be sat-isfied Under this circumstance solving for the minimumFOS requires solving the following constrained nonlinearprogramming problem
119865119911119898
= min119865119911(1199090 119909119899+1 119910119888)
st 1199090min le 1199090 le 0
119909119899le 119909119899+1
le 119909(119899+1)max
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(119894 = 1 2 119899)
(13)
When the determined critical circular arc center is on theboundary of the search region such as 119910
119888= 119910119888max 1199090 =
1199090min or 119909119899+1 = 119909
(119899+1)max the searching region should beexpanded accordingly Otherwise this could result inmissingthe optimum solution due to the small range of the valueTaking 119910
119888max as an example when the vertical coordinateof the critical arc center 119910
119888= 119910119888max (14) can be used for
adjustment Consider
119910119888max = (1 + 120582) 119910119888max (14)
where 120582 is a coefficientThis study applied an EMand PSO to solve (13)The result
yielded from the EM was compared in order to validate theresult of the PSO
311 Exhaustive Method The EM is a method that allowsthe range of 119909
0 119909119899+1
and 119910119888to vary according to a specified
step interval The FOS 119865119911should be solved at every step
for each value in which the minimum value would be theminimum FOS 119865
119911119898 The detailed solving procedure is shown
in Figure 3 This procedure can be easily carried out using aset of programmed computer codes
312 Particle Swarm Optimization Algorithm The PSO isa swarm intelligent heuristic algorithm that was proposedby Dr Eberhart and Dr Kennedy [24] It utilizes individualcoordination and information sharing in the swarm to seekthe optimum solution through iteration The concept ofPSO is simple There are few adjusting parameters and theconvergence speed is fast so it has been widely used indiscrete and continuous optimization problems [25 26]
During the searching process of the CSS on the slopeusing the PSO each precalculated slip surface can be treatedas a particle The number of searching variables is thedimension of the searching space The FOS function 119865
119911is
Start
Initialize the necessary
Search point in the search area
Yes
No
Change the position of search point
Search point on the boundary of search area
Export
End
Expand search area
Yes
Yes
No
No
parameters Fzm x0xn+1 yc etc
Assign x0min x(n+1)max ycmax etc
Fzm = Fz Fzm gt Fz
Calculate Fz
Figure 3 Flow chart of calculating the minimum FOS
the fitness function Assuming that the searching space is119863-dimension the particle swarm consists of 119873 particles Thelocation of the 119894th particle at the 119905th time step is O119905
119894=
(1198741199051198941 1198741199051198942 119874119905
119894119863) the velocity is V119905
119894= (119881119905
1198941 1198811199051198942 119881119905
119894119863)
Thus the procedure of searching for the CSS of the slope usingPSO can be expressed as follows
(1) Parameter initialization including the swarm size 119873particle locationO119905
119894and velocityV119905
119894 themaximum velocity of
the particle Vmax and maximum iteration step 119905max(2) Examination of the particle location to check if the
geometric condition is satisfied that is to ensure a brokenarc does not occur in the determined slip surface if theconditionswere satisfied the calculationwould enter step (3)otherwise the particle location should be adjusted to satisfythe geometric condition and then enter step (3)
(3) Calculating the fitness function value of each particlesthat is calculating the FOS of each slip surface 119865
119905
119911119894=
119865119911(1198741199051198941 1198741199051198942 119874119905
119894119863)
(4) Comparing the fitness function value of each particle119865119905
119911119894with the corresponding fitness function value at the best
position where the particle passed 119865119911119901119894 if 119865119905119911119894
le 119865119911119901119894 the
particle passed best position of O119901119894= O119905119894and the optimal
Computational Intelligence and Neuroscience 5
fitness function value of the particle 119865119911119901119894
= 119865119905119911119894 otherwise
O119901119894and 119865
119911119901119894maintained the same values
(5) Comparing the fitness function value of each particle119865119905119911119894with the fitness function value at the overall best position
if 119865119905119911119894le 119865119911119892 all particles passed the best position at O
119892= O119905119894
and the overall fitness function value was 119865119911119892= 119865119905119911119894 other-
wiseO119892and 119865
119911119892maintained the same values
(6) According to (15) and (16) the velocity and locationof each particle were updated
V119905+1119894
= 119908V119905119894+ 11988811199031(O119901119894minusO119905119894) + 11988821199032(O119892minusO119905119894)
119881119905+1
119894119895=
119881119905+1119894119895
if 10038161003816100381610038161003816119881119905+1
119894119895
10038161003816100381610038161003816le 119881119895max
119881119905+1119894119895
10038161003816100381610038161003816119881119905+1119894119895
10038161003816100381610038161003816
119881119895max if 10038161003816100381610038161003816119881
119905+1
119894119895
10038161003816100381610038161003816gt 119881119895max
(15)
O119905+1119894
= O119905119894+ V119905+1119894 (16)
where 119894 = 1 2 119873 119895 = 1 2 119863 1198881and 1198882are the
acceleration coefficients with a typical value of 1198881= 1198882= 2
1199031and 1199032are random number in the range of [0 1] 119908 is the
inertial factor which is determined using (17) [27]In (16) when the particle runs out of the searching range
that is 119874119905+1119894119895
gt 119874119895max or 119874
119905+1
119894119895lt 119874119895min the ldquoreflecting wallsrdquo
approach would be used [28] Let 119881119905119894119895= minus119881119905119894119895and119874119905+1
119894119895= 119874119905119894119895minus
119881119905119894119895 Consider
119908 = 119908max minus 119905 times119908max minus 119908min
119905max (17)
where 119908max is initial iteration inertial factor and 119908min is theinertial factor at the final iteration Let119908max = 09119908min = 04[29] 119905max is the maximum iteration step and 119905 is the currentinteraction step
(7) If 119905 lt 1199051 let 119905 = 119905 + 1 Then the procedure steps back
to (2) otherwise it enters the next step(8) If the overall optimal fitness function value satisfies
(18) [30 31] or the iteration 119905 gt 119905max the searching processwould be ended At this point 119865
119911119892is the minimum FOS and
the corresponding slip surface is the CSS Otherwise let 119905 =119905 + 1 119905
1= 1199051+ 119905119888 119865119911119892119900
= 119865119911119892 and the procedure enter step (2)
and the next iteration Consider
10038161003816100381610038161003816119865119911119892119900
minus 119865119911119892
10038161003816100381610038161003816le 120576 (18)
where 119865119911119892119900
and 119865119911119892
are the overall optimal fitness functionvalues at the iteration steps 119905
1and 1199051+ 119905119888 respectively 120576 is the
expected minimum degree of error In (18) after 119905119888iteration
steps the variation of the overall optimal fitness functionvalue becomes small
The detailed procedure is shown in Figure 4Given a swarm size 119873 maximum iteration step 119905max can
be determined through sensitivity analysis [32]
Start
Initialize the necessary parameters
Positions of the particles satisfy geometric
conditions
Yes
Yes
No
No
Calculate fitness value
Change the positions
Export
End
Yes
No
M tc tmax etc
Assign t = 0 t1 = tc
Update Oti V
ti
t lt t1 t = t + 1
t gt tmax or|Fzgo minus Fzg| ⩽ 120576
Fzgo = Fzg
t = t + 1
Identify Opi
Fzgo = 1000 and 120576 = 0001
Og Fzpi and Fzg
t1 = t1 + tc and
Figure 4 Flow chart of the particle swarm optimization
32 Calculation of the Partial Slope FOS It can be seen fromthe geometric relationship in Figure 2 that
119909119888=119910119898119903
2 minus 119910119897119903
2 + 119909119898119903
2 minus 119909119897119903
2
2 (119909119898119903minus 119909119897119903)
minus119910119898119903minus 119910119897119903
119909119898119903minus 119909119897119903
119910119888 (19)
119877 = radic(119909119898119903minus 119909119888)2
+ (119910119888minus 119909119898119903)2
(20)
For a known slope when 119909119897119903and 119909
119898119903are known 119910
119897119903and
119910119898119903
can also be determined If 119910119888were also known 119909
119888and 119877
could be determined through (19) and (20) respectively 119909119897119903
119909119898119903 and 119910
119888can be selected as the searching variables Since
the range of 119909119898119903
and 119909119897119903is known that is 119909
119898le 119909119898119903
le 119909119898+1
and 119909119897le 119909119897119903le 119909119897+1
therefore selecting the value rangefor 119910119888to let 119910
119888le 119910119888max is the only requirement Under this
circumstance solving for the minimum FOS requires solvingthe following constrained nonlinear programming problem
119865119895119898= min119865
119895(119909119898119903 119909119897119903 119910119888)
st 119909119897le 119909119897119903le 119909119897+1
6 Computational Intelligence and Neuroscience
Table 1 Comparison of safety factor calculated by different methods
Number Slope angle (∘) 119867 (m) 119862 (kPa) 120593 (∘) 120574 (kNm3) Method FOS 119909119888(m) 119910
119888(m)
1 390 2100 3000 250 230VMM 123 127 3074PSO 124 125 3072EM 123 129 3071
2 266 135 575 70 173AM1 208 mdash mdashPSO 204 133 212EM 204 134 212
3 184 200 100 200 180AM2 149 164 575PSO 149 163 547EM 149 164 575
4 266 120 290 200 192OM 193 mdash mdashPSO 189 81 201EM 189 81 200
5 266 25 10 266 20GA 133 0 688PSO 131 43 584EM 131 45 580
119909119898le 119909119898119903le 119909119898+1
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(21)
where 0 le 119897 le 119899 minus 2 119897 + 2 le 119898 le 119899 119898 minus 119897 lt 119899 and 119894 =119897 + 1 119897 + 2 119898
The solving method for (21) is the same with that of (13)which is not repeated here For the slope with 119899 points onthe slope surface shown in Figure 2 there are totally 119899(119899 minus1)2 minus 1 possible partial slip surfaces that is there are totally119899(119899 minus 1)2 minus 1 possible values for 119898 and 119897 Equation (21) canbe used to calculate the minimum FOS for each situation
4 Case Study
41 Simple Slope Calculation To validate the calculationmethod for the slope FOS in this study a set of computationalprograms was developed The EM and PSO were used to cal-culate the FOS for 5 simple slopes found in the literatureTheresults were comparedwith those from the literature andwerelisted in Table 1 It should be noted that the FOS of the slopewas calculated using the variablemetricmethod (VMM) [14]analytical method 1 (AM1) [7] analytical method 2 (AM2)[6] ordinary method (OM) [33] and genetic algorithms(GA) [34] reported in the literature
In Table 1 it can be seen that the computational resultsfrom the EM and the PSO are very close to that of othermethods indicating that the computational methods arevalid for calculating the FOS of a slope Taking the first slopeas an example VMM calculated the FOS as 123 while theEM and the PSO in this study were estimated as 123 and124 respectively The result of employing the EM was thatit was more accurate Compared to the EM the error from
0 10 20 30 40 50 60
Iteration
Min
imum
fact
or o
f saf
ety
2035
2040
2045
2050
2055
2060
2065
2070
2075
Figure 5 Minimum FOS versus iterations
the PSO was also small indicating that the PSO is feasible forcalculating the FOS of a slope
In these calculations the step for each searching variablein the EM was 01m the swarm size of PSO of119873 was 20Themaximum iteration 119905max was 100 Under the same conditionssuch as the searching range the total iteration in the EM wasmuch larger than in the PSOWith regard to a large slope theiteration in EM could reach several tens of millions requiringsignificant computation time as shown in Table 2
Therefore compared with the EM the PSO had a smallercomputation error and it also reduced the computation timeIt is a more efficient and accurate method for calculating theFOS of a slope
The swarm size and iteration steps can significantlyaffect the computational results in the PSO To determinethe optimum swarm size and iteration steps this studycalculated several swarm sizes iteration steps and estimatedtheir influence on the convergence speed computation loadand the results
Using the second slope as an example letting119873 = 20 theminimumFOS and location of the particles were investigated
Computational Intelligence and Neuroscience 7
10
20
30
40
50yc
(m)
10
20
30
40
50
yc
(m)
10
20
30
40
50
yc
(m)
t = 1t = 10
10
20
30
40
50
yc
(m)
10
20
30
40
50
minus10 0 10 20 30
xc (m)minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
xc (m)
yc
(m)
10
20
30
40
50
yc
(m)
t = 30
t = 70 t = 100
t = 50
ParticlesGlobal best particle
ParticlesGlobal best particle
xc (m) xc (m)
xc (m) xc (m)
Figure 6 Positions of the particles of different iterations
8 Computational Intelligence and Neuroscience
Table 2 Comparison between EM and PSO
Number Method Iteration Computation time (s)
1 EM 10897394 871068PSO 100 0423
2 EM 73441 5292PSO 100 0423
3 EM 4328958 346002PSO 100 0417
4 EM 892133 70783PSO 100 0411
5 EM 4651688 376618PSO 100 0425
0 25 50 75 100 125 150 175 200
Iteration
Ave
rage
fitn
ess
200
205
210
215
220
225
230
235
240
245
250
N = 5
N = 10
N = 15
N = 20
N = 50
Figure 7 Convergence characteristics of PSO
as the variation in the iteration steps The results of thisanalysis can be seen in Figures 5 and 6 In Figure 5 it appearsthat the FOS of the slope decreased with the increase ofthe iteration and reached the minimum value at the 20thiteration In Figure 6 under the initial condition that is 119905 = 1particles dispersed around the global best particle With theincrease of iterations the particles gradually approached theglobal best particle Although the particles were concentratedin the final computation stage these particles were notclustered in the location of the global best particle which wasprimarily due to the particles being caught in the vicinity ofthe point with the local extreme value in the PSO
Thereafter letting 119905max = 200 this study analyzed theconvergence feature of the PSO with a swarm size 119873 of 510 15 20 and 50 The results are presented in Figure 7 Inthe figure it can be seen that the convergence results weregood for the swarm size of 15 20 and 50 Moreover fordifferent swarm sizes the convergence was attained before100 iterations indicating that the PSO converged quicklyTherefore when using the PSO to calculate the slope FOSselecting 119905max = 100 and 119873 = 20 should satisfy therequirements
1
3
2
20
15
10
5
0
minus5minus10 minus5 0 5 10 15 20 25 30 35
y(m
)
x (m)
A1
A5
Figure 8 Cross section of slope and computation results
20
15
10
5
0
minus5
minus10minus15 minus10 minus5 0 5 10 15 20 25 30 35 40
Method ordinary
Fs = 1145
Figure 9 Results of Swedish circle method
42Multistage Slope Calculation Figure 8 shows amultistageslope with the unit weight 120574 = 20 kNm3 cohesion 119888 =
10 kPa and internal friction angle 120593 = 20∘ Utilizing the PSOthe minimum FOS was calculated to be 1076 and the CSS issurface 1 in Figure 8 In addition two different slip surfaces atcompletely different locationswere calculatedwith the factorsof safety close to theminimumFOS as represented by surfaces3 in Figure 8 Their factors of safety were 1118 and 1156 Ifreinforcement was performed only to slip surface 1 the slopemight slide along surfaces 2 and 3
The overall FOS using the Swedish circle method in thesoftware was calculated to be 1145 as shown in Figure 9
Computational Intelligence and Neuroscience 9
If we used AM2 to calculate the overall FOS of the slopethe slope surface can be assumed to be the line of 119860
11198602
Here the calculated FOS was 1009 and the slip surface wasthe blue dashed line shown in Figure 9 In Figure 9 the redsolid line represents the calculated slip surface employingthe PSO presented in this study It can be seen in Figure 9that the calculated slide-in and slide-out points of the slipsurface calculated using the method presented in this paperprovided a close result to that obtained using the softwareThe calculated FOS 1118 was also close to the calculatedvalue obtained from the software that is 1145 which furthervalidated the accuracy of the method presented in this study
5 Conclusions and Further Research
(1) This paper selected the horizontal coordinate of anintercept between the slip surface and the slope topbottom surface and the vertical coordinate of thecenter of the critical arc as the searching variablesUsing the engineering practice to restrain the valuerange of the searching variables this study trans-formed the problem of solving for the minimumFOS of the slope into solving a constrained nonlinearprogramming problem The EM and the PSO wereeasily programmed to solve this problem
(2) The case study of a simple slope indicated that theEM and the PSO provided results that were close tothose obtained using the other established methodsIn addition the EM provided the better accuracy ofthe two Compared to the EM the PSO also hadsmall computation errors and significantly reducedthe computation load The PSO can efficiently andaccurately calculate the slope FOS
(3) In a case study of a multistage slope the methodpresented in this paper estimated the minimum FOSto be 1076 Two potential slip surfaces were alsocalculated with the factors of safety being 1118 and1156 respectively These proved to be close to theminimumFOS but the locations of these two surfaceswere very different from that of the CSS Thereforereinforcement should be carried out for all threesurfaces
(4) Through multiple calculations it was found that thePSO tended to converge quickly Use of the PSO tocalculate slope FOS with 119905max = 100119873 = 20 usuallysatisfies the computational requirement Howeverwith the PSO the particles could be easily caught atthe points with local extreme values demonstratingthat this technique requires further improvement
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Particular thanks are due to Chongxin Zhang and Yabo Zhoufor their assistance with derivation of equations
References
[1] A J Choobbasti F Farrokhzad and A Barari ldquoPredictionof slope stability using artificial neural network (case studyNoabad Mazandaran Iran)rdquo Arabian Journal of Geosciencesvol 2 no 4 pp 311ndash319 2009
[2] N Vatanpour M Ghafoori and H H Talouki ldquoProbabilisticand sensitivity analyses of effective geotechnical parameters onrock slope stability a case study of an urban area in northeastIranrdquo Natural Hazards vol 71 no 3 pp 1659ndash1678 2014
[3] R Kalatehjari N Ali M Kholghifard and M HajihassanildquoThe effects of method of generating circular slip surfaceson determining the critical slip surface by particle swarmoptimizationrdquo Arabian Journal of Geosciences vol 7 no 4 pp1529ndash1539 2014
[4] D-P Deng and L Li ldquoResearch on calculationmethods of slopestability under two types of sliding surfacerdquo Rock and SoilMechanics vol 34 no 2 pp 372ndash410 2013
[5] T B Zhang Earth Slope Stability Analysis and GeotechnologySlope Design Chengdu University of Science and TechnologyPress Chengdu China 1987
[6] G Y Yang ldquoAnalytical calculation of Fellenius method for soilslope stabilityrdquo Mechanics in Engineering vol 17 no 2 pp 59ndash61 1995
[7] J G Cao and M Z Musharraf ldquoShort communicationsanalytical method for analysis of slope stabilityrdquo InternationalJournal for Numerical and Analytical Methods in Geomechanicsvol 23 no 5 pp 439ndash449 1999
[8] B S Jiang M F Cai and A Z Lu ldquoAnalytical calculation ofslope stabilityrdquoChinese Journal of RockMechanics and Engineer-ing vol 23 no 16 pp 2726ndash2729 2004
[9] B S Jiang M F Cai and H Du ldquoAnalytical calculation onstability of slope with planar failure surfacerdquo Chinese Journal ofRock Mechanics and Engineering vol 23 no 1 pp 91ndash94 2004
[10] Y M Cheng T Lansivaara and W B Wei ldquoTwo-dimensionalslope stability analysis by limit equilibrium and strength reduc-tion methodsrdquo Computers and Geotechnics vol 34 no 3 pp137ndash150 2007
[11] P Cao K Zhang Y X Wang and H H Hu ldquoMixed searchalgorithm of critical slip surface of complex sloperdquo ChineseJournal of Rock Mechanics and Engineering vol 29 no 4 pp814ndash821 2010
[12] Z Z Ma H W Qi and X Y Hou ldquoA new roundly searchmethod for slope stability checkingrdquo Rock and Soil Mechanicsvol 21 no 3 pp 256ndash259 2000
[13] W H Lv H H Zhu and X J Li ldquoGA-based generalizedslope stability analysis methodrdquo Chinese Journal of GeotechnicalEngineering vol 27 no 5 pp 595ndash599 2005
[14] Z B Liu and Z H Wang ldquoMethod of determinating thelocation of center of critical circular failure surfacerdquo Journal ofChina Coal Society vol 22 no 6 pp 612ndash616 1997
[15] X-R Zhu Y-J Zhu and X-L Yao ldquoFinding globally criticalsurface by optimization method based on soil slope face gridsrdquoRock and Soil Mechanics vol 27 no 2 pp 252ndash256 2006
[16] Z Y Chen ldquoRandom trials used in determining global mini-mum factors of safety of slopesrdquoCanadianGeotechnical Journalvol 29 no 2 pp 225ndash233 1992
10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

4 Computational Intelligence and Neuroscience
that is the CSS can be obtained Therefore 1199090 119909119899+1
and119910119888can be selected as the searching variables in which
119909119899+1
ge 119909119899 1199090
le 0 To reduce the searching range arestrained range of value of 119909
0 119909119899+1
119910119888should be empirically
evaluated to ensure that 119910119888le 119910119888max 1199090 ge 119909
0min 119909119899+1 ge119909(119899+1)max In addition to avoid occurrence of a broken arcradic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877 (119894 = 1 2 119899) should be sat-isfied Under this circumstance solving for the minimumFOS requires solving the following constrained nonlinearprogramming problem
119865119911119898
= min119865119911(1199090 119909119899+1 119910119888)
st 1199090min le 1199090 le 0
119909119899le 119909119899+1
le 119909(119899+1)max
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(119894 = 1 2 119899)
(13)
When the determined critical circular arc center is on theboundary of the search region such as 119910
119888= 119910119888max 1199090 =
1199090min or 119909119899+1 = 119909
(119899+1)max the searching region should beexpanded accordingly Otherwise this could result inmissingthe optimum solution due to the small range of the valueTaking 119910
119888max as an example when the vertical coordinateof the critical arc center 119910
119888= 119910119888max (14) can be used for
adjustment Consider
119910119888max = (1 + 120582) 119910119888max (14)
where 120582 is a coefficientThis study applied an EMand PSO to solve (13)The result
yielded from the EM was compared in order to validate theresult of the PSO
311 Exhaustive Method The EM is a method that allowsthe range of 119909
0 119909119899+1
and 119910119888to vary according to a specified
step interval The FOS 119865119911should be solved at every step
for each value in which the minimum value would be theminimum FOS 119865
119911119898 The detailed solving procedure is shown
in Figure 3 This procedure can be easily carried out using aset of programmed computer codes
312 Particle Swarm Optimization Algorithm The PSO isa swarm intelligent heuristic algorithm that was proposedby Dr Eberhart and Dr Kennedy [24] It utilizes individualcoordination and information sharing in the swarm to seekthe optimum solution through iteration The concept ofPSO is simple There are few adjusting parameters and theconvergence speed is fast so it has been widely used indiscrete and continuous optimization problems [25 26]
During the searching process of the CSS on the slopeusing the PSO each precalculated slip surface can be treatedas a particle The number of searching variables is thedimension of the searching space The FOS function 119865
119911is
Start
Initialize the necessary
Search point in the search area
Yes
No
Change the position of search point
Search point on the boundary of search area
Export
End
Expand search area
Yes
Yes
No
No
parameters Fzm x0xn+1 yc etc
Assign x0min x(n+1)max ycmax etc
Fzm = Fz Fzm gt Fz
Calculate Fz
Figure 3 Flow chart of calculating the minimum FOS
the fitness function Assuming that the searching space is119863-dimension the particle swarm consists of 119873 particles Thelocation of the 119894th particle at the 119905th time step is O119905
119894=
(1198741199051198941 1198741199051198942 119874119905
119894119863) the velocity is V119905
119894= (119881119905
1198941 1198811199051198942 119881119905
119894119863)
Thus the procedure of searching for the CSS of the slope usingPSO can be expressed as follows
(1) Parameter initialization including the swarm size 119873particle locationO119905
119894and velocityV119905
119894 themaximum velocity of
the particle Vmax and maximum iteration step 119905max(2) Examination of the particle location to check if the
geometric condition is satisfied that is to ensure a brokenarc does not occur in the determined slip surface if theconditionswere satisfied the calculationwould enter step (3)otherwise the particle location should be adjusted to satisfythe geometric condition and then enter step (3)
(3) Calculating the fitness function value of each particlesthat is calculating the FOS of each slip surface 119865
119905
119911119894=
119865119911(1198741199051198941 1198741199051198942 119874119905
119894119863)
(4) Comparing the fitness function value of each particle119865119905
119911119894with the corresponding fitness function value at the best
position where the particle passed 119865119911119901119894 if 119865119905119911119894
le 119865119911119901119894 the
particle passed best position of O119901119894= O119905119894and the optimal
Computational Intelligence and Neuroscience 5
fitness function value of the particle 119865119911119901119894
= 119865119905119911119894 otherwise
O119901119894and 119865
119911119901119894maintained the same values
(5) Comparing the fitness function value of each particle119865119905119911119894with the fitness function value at the overall best position
if 119865119905119911119894le 119865119911119892 all particles passed the best position at O
119892= O119905119894
and the overall fitness function value was 119865119911119892= 119865119905119911119894 other-
wiseO119892and 119865
119911119892maintained the same values
(6) According to (15) and (16) the velocity and locationof each particle were updated
V119905+1119894
= 119908V119905119894+ 11988811199031(O119901119894minusO119905119894) + 11988821199032(O119892minusO119905119894)
119881119905+1
119894119895=
119881119905+1119894119895
if 10038161003816100381610038161003816119881119905+1
119894119895
10038161003816100381610038161003816le 119881119895max
119881119905+1119894119895
10038161003816100381610038161003816119881119905+1119894119895
10038161003816100381610038161003816
119881119895max if 10038161003816100381610038161003816119881
119905+1
119894119895
10038161003816100381610038161003816gt 119881119895max
(15)
O119905+1119894
= O119905119894+ V119905+1119894 (16)
where 119894 = 1 2 119873 119895 = 1 2 119863 1198881and 1198882are the
acceleration coefficients with a typical value of 1198881= 1198882= 2
1199031and 1199032are random number in the range of [0 1] 119908 is the
inertial factor which is determined using (17) [27]In (16) when the particle runs out of the searching range
that is 119874119905+1119894119895
gt 119874119895max or 119874
119905+1
119894119895lt 119874119895min the ldquoreflecting wallsrdquo
approach would be used [28] Let 119881119905119894119895= minus119881119905119894119895and119874119905+1
119894119895= 119874119905119894119895minus
119881119905119894119895 Consider
119908 = 119908max minus 119905 times119908max minus 119908min
119905max (17)
where 119908max is initial iteration inertial factor and 119908min is theinertial factor at the final iteration Let119908max = 09119908min = 04[29] 119905max is the maximum iteration step and 119905 is the currentinteraction step
(7) If 119905 lt 1199051 let 119905 = 119905 + 1 Then the procedure steps back
to (2) otherwise it enters the next step(8) If the overall optimal fitness function value satisfies
(18) [30 31] or the iteration 119905 gt 119905max the searching processwould be ended At this point 119865
119911119892is the minimum FOS and
the corresponding slip surface is the CSS Otherwise let 119905 =119905 + 1 119905
1= 1199051+ 119905119888 119865119911119892119900
= 119865119911119892 and the procedure enter step (2)
and the next iteration Consider
10038161003816100381610038161003816119865119911119892119900
minus 119865119911119892
10038161003816100381610038161003816le 120576 (18)
where 119865119911119892119900
and 119865119911119892
are the overall optimal fitness functionvalues at the iteration steps 119905
1and 1199051+ 119905119888 respectively 120576 is the
expected minimum degree of error In (18) after 119905119888iteration
steps the variation of the overall optimal fitness functionvalue becomes small
The detailed procedure is shown in Figure 4Given a swarm size 119873 maximum iteration step 119905max can
be determined through sensitivity analysis [32]
Start
Initialize the necessary parameters
Positions of the particles satisfy geometric
conditions
Yes
Yes
No
No
Calculate fitness value
Change the positions
Export
End
Yes
No
M tc tmax etc
Assign t = 0 t1 = tc
Update Oti V
ti
t lt t1 t = t + 1
t gt tmax or|Fzgo minus Fzg| ⩽ 120576
Fzgo = Fzg
t = t + 1
Identify Opi
Fzgo = 1000 and 120576 = 0001
Og Fzpi and Fzg
t1 = t1 + tc and
Figure 4 Flow chart of the particle swarm optimization
32 Calculation of the Partial Slope FOS It can be seen fromthe geometric relationship in Figure 2 that
119909119888=119910119898119903
2 minus 119910119897119903
2 + 119909119898119903
2 minus 119909119897119903
2
2 (119909119898119903minus 119909119897119903)
minus119910119898119903minus 119910119897119903
119909119898119903minus 119909119897119903
119910119888 (19)
119877 = radic(119909119898119903minus 119909119888)2
+ (119910119888minus 119909119898119903)2
(20)
For a known slope when 119909119897119903and 119909
119898119903are known 119910
119897119903and
119910119898119903
can also be determined If 119910119888were also known 119909
119888and 119877
could be determined through (19) and (20) respectively 119909119897119903
119909119898119903 and 119910
119888can be selected as the searching variables Since
the range of 119909119898119903
and 119909119897119903is known that is 119909
119898le 119909119898119903
le 119909119898+1
and 119909119897le 119909119897119903le 119909119897+1
therefore selecting the value rangefor 119910119888to let 119910
119888le 119910119888max is the only requirement Under this
circumstance solving for the minimum FOS requires solvingthe following constrained nonlinear programming problem
119865119895119898= min119865
119895(119909119898119903 119909119897119903 119910119888)
st 119909119897le 119909119897119903le 119909119897+1
6 Computational Intelligence and Neuroscience
Table 1 Comparison of safety factor calculated by different methods
Number Slope angle (∘) 119867 (m) 119862 (kPa) 120593 (∘) 120574 (kNm3) Method FOS 119909119888(m) 119910
119888(m)
1 390 2100 3000 250 230VMM 123 127 3074PSO 124 125 3072EM 123 129 3071
2 266 135 575 70 173AM1 208 mdash mdashPSO 204 133 212EM 204 134 212
3 184 200 100 200 180AM2 149 164 575PSO 149 163 547EM 149 164 575
4 266 120 290 200 192OM 193 mdash mdashPSO 189 81 201EM 189 81 200
5 266 25 10 266 20GA 133 0 688PSO 131 43 584EM 131 45 580
119909119898le 119909119898119903le 119909119898+1
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(21)
where 0 le 119897 le 119899 minus 2 119897 + 2 le 119898 le 119899 119898 minus 119897 lt 119899 and 119894 =119897 + 1 119897 + 2 119898
The solving method for (21) is the same with that of (13)which is not repeated here For the slope with 119899 points onthe slope surface shown in Figure 2 there are totally 119899(119899 minus1)2 minus 1 possible partial slip surfaces that is there are totally119899(119899 minus 1)2 minus 1 possible values for 119898 and 119897 Equation (21) canbe used to calculate the minimum FOS for each situation
4 Case Study
41 Simple Slope Calculation To validate the calculationmethod for the slope FOS in this study a set of computationalprograms was developed The EM and PSO were used to cal-culate the FOS for 5 simple slopes found in the literatureTheresults were comparedwith those from the literature andwerelisted in Table 1 It should be noted that the FOS of the slopewas calculated using the variablemetricmethod (VMM) [14]analytical method 1 (AM1) [7] analytical method 2 (AM2)[6] ordinary method (OM) [33] and genetic algorithms(GA) [34] reported in the literature
In Table 1 it can be seen that the computational resultsfrom the EM and the PSO are very close to that of othermethods indicating that the computational methods arevalid for calculating the FOS of a slope Taking the first slopeas an example VMM calculated the FOS as 123 while theEM and the PSO in this study were estimated as 123 and124 respectively The result of employing the EM was thatit was more accurate Compared to the EM the error from
0 10 20 30 40 50 60
Iteration
Min
imum
fact
or o
f saf
ety
2035
2040
2045
2050
2055
2060
2065
2070
2075
Figure 5 Minimum FOS versus iterations
the PSO was also small indicating that the PSO is feasible forcalculating the FOS of a slope
In these calculations the step for each searching variablein the EM was 01m the swarm size of PSO of119873 was 20Themaximum iteration 119905max was 100 Under the same conditionssuch as the searching range the total iteration in the EM wasmuch larger than in the PSOWith regard to a large slope theiteration in EM could reach several tens of millions requiringsignificant computation time as shown in Table 2
Therefore compared with the EM the PSO had a smallercomputation error and it also reduced the computation timeIt is a more efficient and accurate method for calculating theFOS of a slope
The swarm size and iteration steps can significantlyaffect the computational results in the PSO To determinethe optimum swarm size and iteration steps this studycalculated several swarm sizes iteration steps and estimatedtheir influence on the convergence speed computation loadand the results
Using the second slope as an example letting119873 = 20 theminimumFOS and location of the particles were investigated
Computational Intelligence and Neuroscience 7
10
20
30
40
50yc
(m)
10
20
30
40
50
yc
(m)
10
20
30
40
50
yc
(m)
t = 1t = 10
10
20
30
40
50
yc
(m)
10
20
30
40
50
minus10 0 10 20 30
xc (m)minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
xc (m)
yc
(m)
10
20
30
40
50
yc
(m)
t = 30
t = 70 t = 100
t = 50
ParticlesGlobal best particle
ParticlesGlobal best particle
xc (m) xc (m)
xc (m) xc (m)
Figure 6 Positions of the particles of different iterations
8 Computational Intelligence and Neuroscience
Table 2 Comparison between EM and PSO
Number Method Iteration Computation time (s)
1 EM 10897394 871068PSO 100 0423
2 EM 73441 5292PSO 100 0423
3 EM 4328958 346002PSO 100 0417
4 EM 892133 70783PSO 100 0411
5 EM 4651688 376618PSO 100 0425
0 25 50 75 100 125 150 175 200
Iteration
Ave
rage
fitn
ess
200
205
210
215
220
225
230
235
240
245
250
N = 5
N = 10
N = 15
N = 20
N = 50
Figure 7 Convergence characteristics of PSO
as the variation in the iteration steps The results of thisanalysis can be seen in Figures 5 and 6 In Figure 5 it appearsthat the FOS of the slope decreased with the increase ofthe iteration and reached the minimum value at the 20thiteration In Figure 6 under the initial condition that is 119905 = 1particles dispersed around the global best particle With theincrease of iterations the particles gradually approached theglobal best particle Although the particles were concentratedin the final computation stage these particles were notclustered in the location of the global best particle which wasprimarily due to the particles being caught in the vicinity ofthe point with the local extreme value in the PSO
Thereafter letting 119905max = 200 this study analyzed theconvergence feature of the PSO with a swarm size 119873 of 510 15 20 and 50 The results are presented in Figure 7 Inthe figure it can be seen that the convergence results weregood for the swarm size of 15 20 and 50 Moreover fordifferent swarm sizes the convergence was attained before100 iterations indicating that the PSO converged quicklyTherefore when using the PSO to calculate the slope FOSselecting 119905max = 100 and 119873 = 20 should satisfy therequirements
1
3
2
20
15
10
5
0
minus5minus10 minus5 0 5 10 15 20 25 30 35
y(m
)
x (m)
A1
A5
Figure 8 Cross section of slope and computation results
20
15
10
5
0
minus5
minus10minus15 minus10 minus5 0 5 10 15 20 25 30 35 40
Method ordinary
Fs = 1145
Figure 9 Results of Swedish circle method
42Multistage Slope Calculation Figure 8 shows amultistageslope with the unit weight 120574 = 20 kNm3 cohesion 119888 =
10 kPa and internal friction angle 120593 = 20∘ Utilizing the PSOthe minimum FOS was calculated to be 1076 and the CSS issurface 1 in Figure 8 In addition two different slip surfaces atcompletely different locationswere calculatedwith the factorsof safety close to theminimumFOS as represented by surfaces3 in Figure 8 Their factors of safety were 1118 and 1156 Ifreinforcement was performed only to slip surface 1 the slopemight slide along surfaces 2 and 3
The overall FOS using the Swedish circle method in thesoftware was calculated to be 1145 as shown in Figure 9
Computational Intelligence and Neuroscience 9
If we used AM2 to calculate the overall FOS of the slopethe slope surface can be assumed to be the line of 119860
11198602
Here the calculated FOS was 1009 and the slip surface wasthe blue dashed line shown in Figure 9 In Figure 9 the redsolid line represents the calculated slip surface employingthe PSO presented in this study It can be seen in Figure 9that the calculated slide-in and slide-out points of the slipsurface calculated using the method presented in this paperprovided a close result to that obtained using the softwareThe calculated FOS 1118 was also close to the calculatedvalue obtained from the software that is 1145 which furthervalidated the accuracy of the method presented in this study
5 Conclusions and Further Research
(1) This paper selected the horizontal coordinate of anintercept between the slip surface and the slope topbottom surface and the vertical coordinate of thecenter of the critical arc as the searching variablesUsing the engineering practice to restrain the valuerange of the searching variables this study trans-formed the problem of solving for the minimumFOS of the slope into solving a constrained nonlinearprogramming problem The EM and the PSO wereeasily programmed to solve this problem
(2) The case study of a simple slope indicated that theEM and the PSO provided results that were close tothose obtained using the other established methodsIn addition the EM provided the better accuracy ofthe two Compared to the EM the PSO also hadsmall computation errors and significantly reducedthe computation load The PSO can efficiently andaccurately calculate the slope FOS
(3) In a case study of a multistage slope the methodpresented in this paper estimated the minimum FOSto be 1076 Two potential slip surfaces were alsocalculated with the factors of safety being 1118 and1156 respectively These proved to be close to theminimumFOS but the locations of these two surfaceswere very different from that of the CSS Thereforereinforcement should be carried out for all threesurfaces
(4) Through multiple calculations it was found that thePSO tended to converge quickly Use of the PSO tocalculate slope FOS with 119905max = 100119873 = 20 usuallysatisfies the computational requirement Howeverwith the PSO the particles could be easily caught atthe points with local extreme values demonstratingthat this technique requires further improvement
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Particular thanks are due to Chongxin Zhang and Yabo Zhoufor their assistance with derivation of equations
References
[1] A J Choobbasti F Farrokhzad and A Barari ldquoPredictionof slope stability using artificial neural network (case studyNoabad Mazandaran Iran)rdquo Arabian Journal of Geosciencesvol 2 no 4 pp 311ndash319 2009
[2] N Vatanpour M Ghafoori and H H Talouki ldquoProbabilisticand sensitivity analyses of effective geotechnical parameters onrock slope stability a case study of an urban area in northeastIranrdquo Natural Hazards vol 71 no 3 pp 1659ndash1678 2014
[3] R Kalatehjari N Ali M Kholghifard and M HajihassanildquoThe effects of method of generating circular slip surfaceson determining the critical slip surface by particle swarmoptimizationrdquo Arabian Journal of Geosciences vol 7 no 4 pp1529ndash1539 2014
[4] D-P Deng and L Li ldquoResearch on calculationmethods of slopestability under two types of sliding surfacerdquo Rock and SoilMechanics vol 34 no 2 pp 372ndash410 2013
[5] T B Zhang Earth Slope Stability Analysis and GeotechnologySlope Design Chengdu University of Science and TechnologyPress Chengdu China 1987
[6] G Y Yang ldquoAnalytical calculation of Fellenius method for soilslope stabilityrdquo Mechanics in Engineering vol 17 no 2 pp 59ndash61 1995
[7] J G Cao and M Z Musharraf ldquoShort communicationsanalytical method for analysis of slope stabilityrdquo InternationalJournal for Numerical and Analytical Methods in Geomechanicsvol 23 no 5 pp 439ndash449 1999
[8] B S Jiang M F Cai and A Z Lu ldquoAnalytical calculation ofslope stabilityrdquoChinese Journal of RockMechanics and Engineer-ing vol 23 no 16 pp 2726ndash2729 2004
[9] B S Jiang M F Cai and H Du ldquoAnalytical calculation onstability of slope with planar failure surfacerdquo Chinese Journal ofRock Mechanics and Engineering vol 23 no 1 pp 91ndash94 2004
[10] Y M Cheng T Lansivaara and W B Wei ldquoTwo-dimensionalslope stability analysis by limit equilibrium and strength reduc-tion methodsrdquo Computers and Geotechnics vol 34 no 3 pp137ndash150 2007
[11] P Cao K Zhang Y X Wang and H H Hu ldquoMixed searchalgorithm of critical slip surface of complex sloperdquo ChineseJournal of Rock Mechanics and Engineering vol 29 no 4 pp814ndash821 2010
[12] Z Z Ma H W Qi and X Y Hou ldquoA new roundly searchmethod for slope stability checkingrdquo Rock and Soil Mechanicsvol 21 no 3 pp 256ndash259 2000
[13] W H Lv H H Zhu and X J Li ldquoGA-based generalizedslope stability analysis methodrdquo Chinese Journal of GeotechnicalEngineering vol 27 no 5 pp 595ndash599 2005
[14] Z B Liu and Z H Wang ldquoMethod of determinating thelocation of center of critical circular failure surfacerdquo Journal ofChina Coal Society vol 22 no 6 pp 612ndash616 1997
[15] X-R Zhu Y-J Zhu and X-L Yao ldquoFinding globally criticalsurface by optimization method based on soil slope face gridsrdquoRock and Soil Mechanics vol 27 no 2 pp 252ndash256 2006
[16] Z Y Chen ldquoRandom trials used in determining global mini-mum factors of safety of slopesrdquoCanadianGeotechnical Journalvol 29 no 2 pp 225ndash233 1992
10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
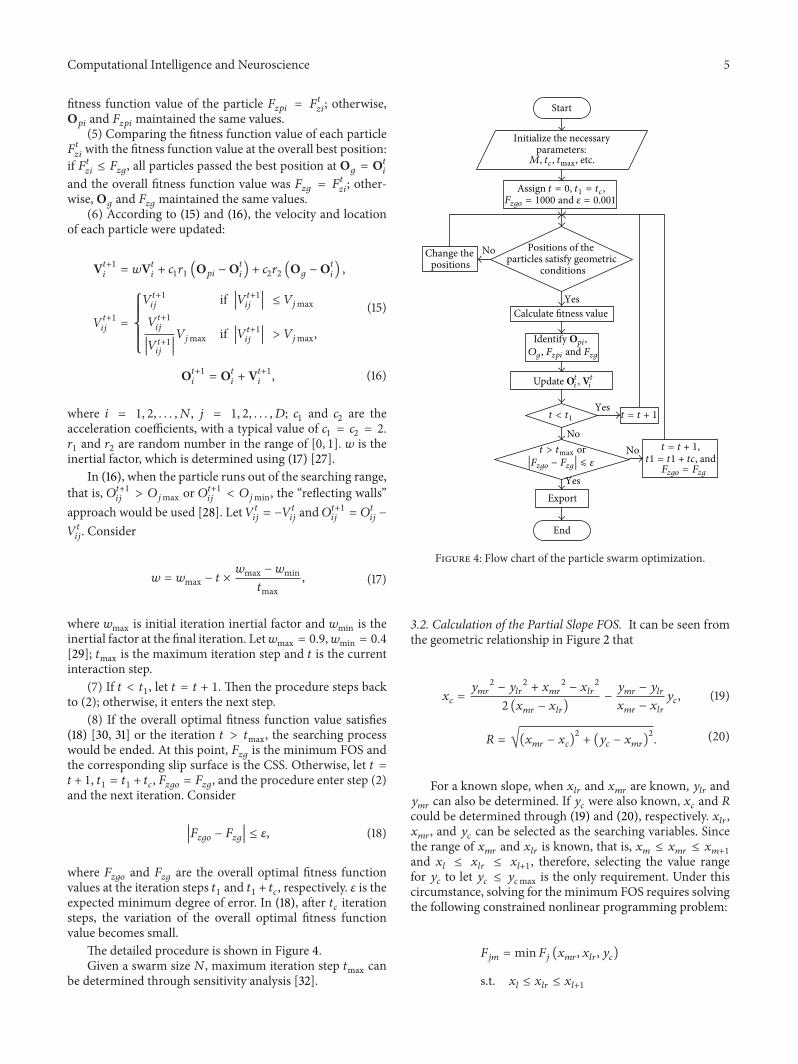
Computational Intelligence and Neuroscience 5
fitness function value of the particle 119865119911119901119894
= 119865119905119911119894 otherwise
O119901119894and 119865
119911119901119894maintained the same values
(5) Comparing the fitness function value of each particle119865119905119911119894with the fitness function value at the overall best position
if 119865119905119911119894le 119865119911119892 all particles passed the best position at O
119892= O119905119894
and the overall fitness function value was 119865119911119892= 119865119905119911119894 other-
wiseO119892and 119865
119911119892maintained the same values
(6) According to (15) and (16) the velocity and locationof each particle were updated
V119905+1119894
= 119908V119905119894+ 11988811199031(O119901119894minusO119905119894) + 11988821199032(O119892minusO119905119894)
119881119905+1
119894119895=
119881119905+1119894119895
if 10038161003816100381610038161003816119881119905+1
119894119895
10038161003816100381610038161003816le 119881119895max
119881119905+1119894119895
10038161003816100381610038161003816119881119905+1119894119895
10038161003816100381610038161003816
119881119895max if 10038161003816100381610038161003816119881
119905+1
119894119895
10038161003816100381610038161003816gt 119881119895max
(15)
O119905+1119894
= O119905119894+ V119905+1119894 (16)
where 119894 = 1 2 119873 119895 = 1 2 119863 1198881and 1198882are the
acceleration coefficients with a typical value of 1198881= 1198882= 2
1199031and 1199032are random number in the range of [0 1] 119908 is the
inertial factor which is determined using (17) [27]In (16) when the particle runs out of the searching range
that is 119874119905+1119894119895
gt 119874119895max or 119874
119905+1
119894119895lt 119874119895min the ldquoreflecting wallsrdquo
approach would be used [28] Let 119881119905119894119895= minus119881119905119894119895and119874119905+1
119894119895= 119874119905119894119895minus
119881119905119894119895 Consider
119908 = 119908max minus 119905 times119908max minus 119908min
119905max (17)
where 119908max is initial iteration inertial factor and 119908min is theinertial factor at the final iteration Let119908max = 09119908min = 04[29] 119905max is the maximum iteration step and 119905 is the currentinteraction step
(7) If 119905 lt 1199051 let 119905 = 119905 + 1 Then the procedure steps back
to (2) otherwise it enters the next step(8) If the overall optimal fitness function value satisfies
(18) [30 31] or the iteration 119905 gt 119905max the searching processwould be ended At this point 119865
119911119892is the minimum FOS and
the corresponding slip surface is the CSS Otherwise let 119905 =119905 + 1 119905
1= 1199051+ 119905119888 119865119911119892119900
= 119865119911119892 and the procedure enter step (2)
and the next iteration Consider
10038161003816100381610038161003816119865119911119892119900
minus 119865119911119892
10038161003816100381610038161003816le 120576 (18)
where 119865119911119892119900
and 119865119911119892
are the overall optimal fitness functionvalues at the iteration steps 119905
1and 1199051+ 119905119888 respectively 120576 is the
expected minimum degree of error In (18) after 119905119888iteration
steps the variation of the overall optimal fitness functionvalue becomes small
The detailed procedure is shown in Figure 4Given a swarm size 119873 maximum iteration step 119905max can
be determined through sensitivity analysis [32]
Start
Initialize the necessary parameters
Positions of the particles satisfy geometric
conditions
Yes
Yes
No
No
Calculate fitness value
Change the positions
Export
End
Yes
No
M tc tmax etc
Assign t = 0 t1 = tc
Update Oti V
ti
t lt t1 t = t + 1
t gt tmax or|Fzgo minus Fzg| ⩽ 120576
Fzgo = Fzg
t = t + 1
Identify Opi
Fzgo = 1000 and 120576 = 0001
Og Fzpi and Fzg
t1 = t1 + tc and
Figure 4 Flow chart of the particle swarm optimization
32 Calculation of the Partial Slope FOS It can be seen fromthe geometric relationship in Figure 2 that
119909119888=119910119898119903
2 minus 119910119897119903
2 + 119909119898119903
2 minus 119909119897119903
2
2 (119909119898119903minus 119909119897119903)
minus119910119898119903minus 119910119897119903
119909119898119903minus 119909119897119903
119910119888 (19)
119877 = radic(119909119898119903minus 119909119888)2
+ (119910119888minus 119909119898119903)2
(20)
For a known slope when 119909119897119903and 119909
119898119903are known 119910
119897119903and
119910119898119903
can also be determined If 119910119888were also known 119909
119888and 119877
could be determined through (19) and (20) respectively 119909119897119903
119909119898119903 and 119910
119888can be selected as the searching variables Since
the range of 119909119898119903
and 119909119897119903is known that is 119909
119898le 119909119898119903
le 119909119898+1
and 119909119897le 119909119897119903le 119909119897+1
therefore selecting the value rangefor 119910119888to let 119910
119888le 119910119888max is the only requirement Under this
circumstance solving for the minimum FOS requires solvingthe following constrained nonlinear programming problem
119865119895119898= min119865
119895(119909119898119903 119909119897119903 119910119888)
st 119909119897le 119909119897119903le 119909119897+1
6 Computational Intelligence and Neuroscience
Table 1 Comparison of safety factor calculated by different methods
Number Slope angle (∘) 119867 (m) 119862 (kPa) 120593 (∘) 120574 (kNm3) Method FOS 119909119888(m) 119910
119888(m)
1 390 2100 3000 250 230VMM 123 127 3074PSO 124 125 3072EM 123 129 3071
2 266 135 575 70 173AM1 208 mdash mdashPSO 204 133 212EM 204 134 212
3 184 200 100 200 180AM2 149 164 575PSO 149 163 547EM 149 164 575
4 266 120 290 200 192OM 193 mdash mdashPSO 189 81 201EM 189 81 200
5 266 25 10 266 20GA 133 0 688PSO 131 43 584EM 131 45 580
119909119898le 119909119898119903le 119909119898+1
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(21)
where 0 le 119897 le 119899 minus 2 119897 + 2 le 119898 le 119899 119898 minus 119897 lt 119899 and 119894 =119897 + 1 119897 + 2 119898
The solving method for (21) is the same with that of (13)which is not repeated here For the slope with 119899 points onthe slope surface shown in Figure 2 there are totally 119899(119899 minus1)2 minus 1 possible partial slip surfaces that is there are totally119899(119899 minus 1)2 minus 1 possible values for 119898 and 119897 Equation (21) canbe used to calculate the minimum FOS for each situation
4 Case Study
41 Simple Slope Calculation To validate the calculationmethod for the slope FOS in this study a set of computationalprograms was developed The EM and PSO were used to cal-culate the FOS for 5 simple slopes found in the literatureTheresults were comparedwith those from the literature andwerelisted in Table 1 It should be noted that the FOS of the slopewas calculated using the variablemetricmethod (VMM) [14]analytical method 1 (AM1) [7] analytical method 2 (AM2)[6] ordinary method (OM) [33] and genetic algorithms(GA) [34] reported in the literature
In Table 1 it can be seen that the computational resultsfrom the EM and the PSO are very close to that of othermethods indicating that the computational methods arevalid for calculating the FOS of a slope Taking the first slopeas an example VMM calculated the FOS as 123 while theEM and the PSO in this study were estimated as 123 and124 respectively The result of employing the EM was thatit was more accurate Compared to the EM the error from
0 10 20 30 40 50 60
Iteration
Min
imum
fact
or o
f saf
ety
2035
2040
2045
2050
2055
2060
2065
2070
2075
Figure 5 Minimum FOS versus iterations
the PSO was also small indicating that the PSO is feasible forcalculating the FOS of a slope
In these calculations the step for each searching variablein the EM was 01m the swarm size of PSO of119873 was 20Themaximum iteration 119905max was 100 Under the same conditionssuch as the searching range the total iteration in the EM wasmuch larger than in the PSOWith regard to a large slope theiteration in EM could reach several tens of millions requiringsignificant computation time as shown in Table 2
Therefore compared with the EM the PSO had a smallercomputation error and it also reduced the computation timeIt is a more efficient and accurate method for calculating theFOS of a slope
The swarm size and iteration steps can significantlyaffect the computational results in the PSO To determinethe optimum swarm size and iteration steps this studycalculated several swarm sizes iteration steps and estimatedtheir influence on the convergence speed computation loadand the results
Using the second slope as an example letting119873 = 20 theminimumFOS and location of the particles were investigated
Computational Intelligence and Neuroscience 7
10
20
30
40
50yc
(m)
10
20
30
40
50
yc
(m)
10
20
30
40
50
yc
(m)
t = 1t = 10
10
20
30
40
50
yc
(m)
10
20
30
40
50
minus10 0 10 20 30
xc (m)minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
xc (m)
yc
(m)
10
20
30
40
50
yc
(m)
t = 30
t = 70 t = 100
t = 50
ParticlesGlobal best particle
ParticlesGlobal best particle
xc (m) xc (m)
xc (m) xc (m)
Figure 6 Positions of the particles of different iterations
8 Computational Intelligence and Neuroscience
Table 2 Comparison between EM and PSO
Number Method Iteration Computation time (s)
1 EM 10897394 871068PSO 100 0423
2 EM 73441 5292PSO 100 0423
3 EM 4328958 346002PSO 100 0417
4 EM 892133 70783PSO 100 0411
5 EM 4651688 376618PSO 100 0425
0 25 50 75 100 125 150 175 200
Iteration
Ave
rage
fitn
ess
200
205
210
215
220
225
230
235
240
245
250
N = 5
N = 10
N = 15
N = 20
N = 50
Figure 7 Convergence characteristics of PSO
as the variation in the iteration steps The results of thisanalysis can be seen in Figures 5 and 6 In Figure 5 it appearsthat the FOS of the slope decreased with the increase ofthe iteration and reached the minimum value at the 20thiteration In Figure 6 under the initial condition that is 119905 = 1particles dispersed around the global best particle With theincrease of iterations the particles gradually approached theglobal best particle Although the particles were concentratedin the final computation stage these particles were notclustered in the location of the global best particle which wasprimarily due to the particles being caught in the vicinity ofthe point with the local extreme value in the PSO
Thereafter letting 119905max = 200 this study analyzed theconvergence feature of the PSO with a swarm size 119873 of 510 15 20 and 50 The results are presented in Figure 7 Inthe figure it can be seen that the convergence results weregood for the swarm size of 15 20 and 50 Moreover fordifferent swarm sizes the convergence was attained before100 iterations indicating that the PSO converged quicklyTherefore when using the PSO to calculate the slope FOSselecting 119905max = 100 and 119873 = 20 should satisfy therequirements
1
3
2
20
15
10
5
0
minus5minus10 minus5 0 5 10 15 20 25 30 35
y(m
)
x (m)
A1
A5
Figure 8 Cross section of slope and computation results
20
15
10
5
0
minus5
minus10minus15 minus10 minus5 0 5 10 15 20 25 30 35 40
Method ordinary
Fs = 1145
Figure 9 Results of Swedish circle method
42Multistage Slope Calculation Figure 8 shows amultistageslope with the unit weight 120574 = 20 kNm3 cohesion 119888 =
10 kPa and internal friction angle 120593 = 20∘ Utilizing the PSOthe minimum FOS was calculated to be 1076 and the CSS issurface 1 in Figure 8 In addition two different slip surfaces atcompletely different locationswere calculatedwith the factorsof safety close to theminimumFOS as represented by surfaces3 in Figure 8 Their factors of safety were 1118 and 1156 Ifreinforcement was performed only to slip surface 1 the slopemight slide along surfaces 2 and 3
The overall FOS using the Swedish circle method in thesoftware was calculated to be 1145 as shown in Figure 9
Computational Intelligence and Neuroscience 9
If we used AM2 to calculate the overall FOS of the slopethe slope surface can be assumed to be the line of 119860
11198602
Here the calculated FOS was 1009 and the slip surface wasthe blue dashed line shown in Figure 9 In Figure 9 the redsolid line represents the calculated slip surface employingthe PSO presented in this study It can be seen in Figure 9that the calculated slide-in and slide-out points of the slipsurface calculated using the method presented in this paperprovided a close result to that obtained using the softwareThe calculated FOS 1118 was also close to the calculatedvalue obtained from the software that is 1145 which furthervalidated the accuracy of the method presented in this study
5 Conclusions and Further Research
(1) This paper selected the horizontal coordinate of anintercept between the slip surface and the slope topbottom surface and the vertical coordinate of thecenter of the critical arc as the searching variablesUsing the engineering practice to restrain the valuerange of the searching variables this study trans-formed the problem of solving for the minimumFOS of the slope into solving a constrained nonlinearprogramming problem The EM and the PSO wereeasily programmed to solve this problem
(2) The case study of a simple slope indicated that theEM and the PSO provided results that were close tothose obtained using the other established methodsIn addition the EM provided the better accuracy ofthe two Compared to the EM the PSO also hadsmall computation errors and significantly reducedthe computation load The PSO can efficiently andaccurately calculate the slope FOS
(3) In a case study of a multistage slope the methodpresented in this paper estimated the minimum FOSto be 1076 Two potential slip surfaces were alsocalculated with the factors of safety being 1118 and1156 respectively These proved to be close to theminimumFOS but the locations of these two surfaceswere very different from that of the CSS Thereforereinforcement should be carried out for all threesurfaces
(4) Through multiple calculations it was found that thePSO tended to converge quickly Use of the PSO tocalculate slope FOS with 119905max = 100119873 = 20 usuallysatisfies the computational requirement Howeverwith the PSO the particles could be easily caught atthe points with local extreme values demonstratingthat this technique requires further improvement
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Particular thanks are due to Chongxin Zhang and Yabo Zhoufor their assistance with derivation of equations
References
[1] A J Choobbasti F Farrokhzad and A Barari ldquoPredictionof slope stability using artificial neural network (case studyNoabad Mazandaran Iran)rdquo Arabian Journal of Geosciencesvol 2 no 4 pp 311ndash319 2009
[2] N Vatanpour M Ghafoori and H H Talouki ldquoProbabilisticand sensitivity analyses of effective geotechnical parameters onrock slope stability a case study of an urban area in northeastIranrdquo Natural Hazards vol 71 no 3 pp 1659ndash1678 2014
[3] R Kalatehjari N Ali M Kholghifard and M HajihassanildquoThe effects of method of generating circular slip surfaceson determining the critical slip surface by particle swarmoptimizationrdquo Arabian Journal of Geosciences vol 7 no 4 pp1529ndash1539 2014
[4] D-P Deng and L Li ldquoResearch on calculationmethods of slopestability under two types of sliding surfacerdquo Rock and SoilMechanics vol 34 no 2 pp 372ndash410 2013
[5] T B Zhang Earth Slope Stability Analysis and GeotechnologySlope Design Chengdu University of Science and TechnologyPress Chengdu China 1987
[6] G Y Yang ldquoAnalytical calculation of Fellenius method for soilslope stabilityrdquo Mechanics in Engineering vol 17 no 2 pp 59ndash61 1995
[7] J G Cao and M Z Musharraf ldquoShort communicationsanalytical method for analysis of slope stabilityrdquo InternationalJournal for Numerical and Analytical Methods in Geomechanicsvol 23 no 5 pp 439ndash449 1999
[8] B S Jiang M F Cai and A Z Lu ldquoAnalytical calculation ofslope stabilityrdquoChinese Journal of RockMechanics and Engineer-ing vol 23 no 16 pp 2726ndash2729 2004
[9] B S Jiang M F Cai and H Du ldquoAnalytical calculation onstability of slope with planar failure surfacerdquo Chinese Journal ofRock Mechanics and Engineering vol 23 no 1 pp 91ndash94 2004
[10] Y M Cheng T Lansivaara and W B Wei ldquoTwo-dimensionalslope stability analysis by limit equilibrium and strength reduc-tion methodsrdquo Computers and Geotechnics vol 34 no 3 pp137ndash150 2007
[11] P Cao K Zhang Y X Wang and H H Hu ldquoMixed searchalgorithm of critical slip surface of complex sloperdquo ChineseJournal of Rock Mechanics and Engineering vol 29 no 4 pp814ndash821 2010
[12] Z Z Ma H W Qi and X Y Hou ldquoA new roundly searchmethod for slope stability checkingrdquo Rock and Soil Mechanicsvol 21 no 3 pp 256ndash259 2000
[13] W H Lv H H Zhu and X J Li ldquoGA-based generalizedslope stability analysis methodrdquo Chinese Journal of GeotechnicalEngineering vol 27 no 5 pp 595ndash599 2005
[14] Z B Liu and Z H Wang ldquoMethod of determinating thelocation of center of critical circular failure surfacerdquo Journal ofChina Coal Society vol 22 no 6 pp 612ndash616 1997
[15] X-R Zhu Y-J Zhu and X-L Yao ldquoFinding globally criticalsurface by optimization method based on soil slope face gridsrdquoRock and Soil Mechanics vol 27 no 2 pp 252ndash256 2006
[16] Z Y Chen ldquoRandom trials used in determining global mini-mum factors of safety of slopesrdquoCanadianGeotechnical Journalvol 29 no 2 pp 225ndash233 1992
10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
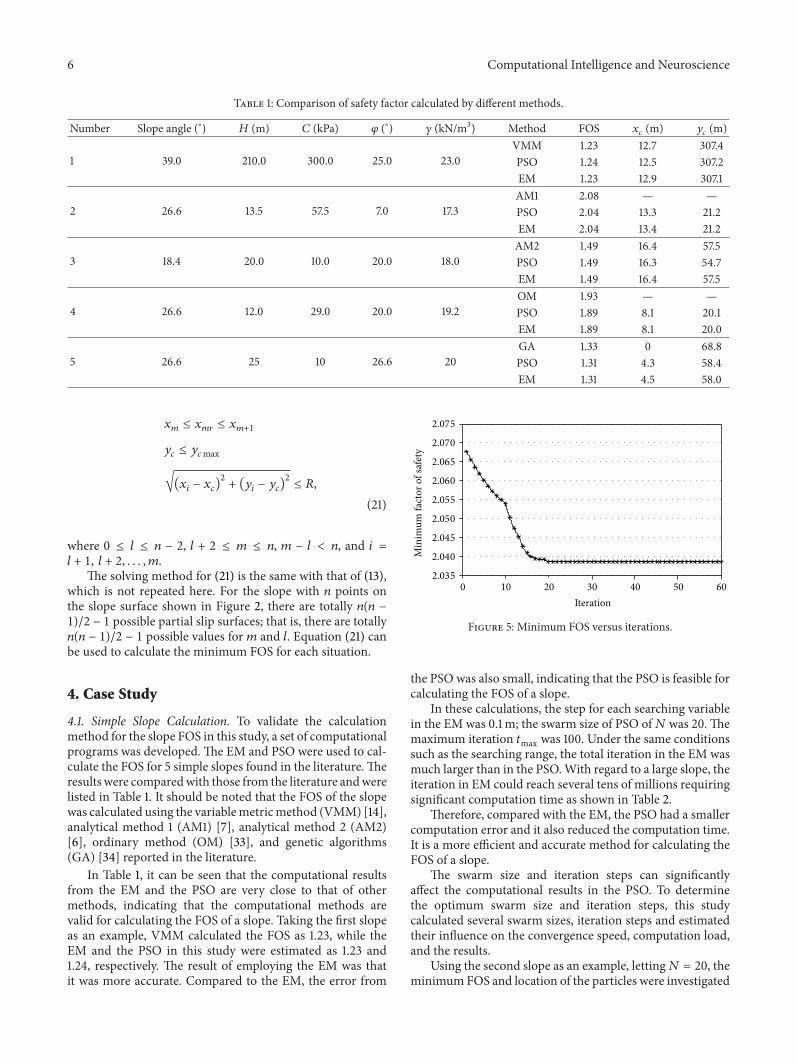
6 Computational Intelligence and Neuroscience
Table 1 Comparison of safety factor calculated by different methods
Number Slope angle (∘) 119867 (m) 119862 (kPa) 120593 (∘) 120574 (kNm3) Method FOS 119909119888(m) 119910
119888(m)
1 390 2100 3000 250 230VMM 123 127 3074PSO 124 125 3072EM 123 129 3071
2 266 135 575 70 173AM1 208 mdash mdashPSO 204 133 212EM 204 134 212
3 184 200 100 200 180AM2 149 164 575PSO 149 163 547EM 149 164 575
4 266 120 290 200 192OM 193 mdash mdashPSO 189 81 201EM 189 81 200
5 266 25 10 266 20GA 133 0 688PSO 131 43 584EM 131 45 580
119909119898le 119909119898119903le 119909119898+1
119910119888le 119910119888max
radic(119909119894minus 119909119888)2
+ (119910119894minus 119910119888)2
le 119877
(21)
where 0 le 119897 le 119899 minus 2 119897 + 2 le 119898 le 119899 119898 minus 119897 lt 119899 and 119894 =119897 + 1 119897 + 2 119898
The solving method for (21) is the same with that of (13)which is not repeated here For the slope with 119899 points onthe slope surface shown in Figure 2 there are totally 119899(119899 minus1)2 minus 1 possible partial slip surfaces that is there are totally119899(119899 minus 1)2 minus 1 possible values for 119898 and 119897 Equation (21) canbe used to calculate the minimum FOS for each situation
4 Case Study
41 Simple Slope Calculation To validate the calculationmethod for the slope FOS in this study a set of computationalprograms was developed The EM and PSO were used to cal-culate the FOS for 5 simple slopes found in the literatureTheresults were comparedwith those from the literature andwerelisted in Table 1 It should be noted that the FOS of the slopewas calculated using the variablemetricmethod (VMM) [14]analytical method 1 (AM1) [7] analytical method 2 (AM2)[6] ordinary method (OM) [33] and genetic algorithms(GA) [34] reported in the literature
In Table 1 it can be seen that the computational resultsfrom the EM and the PSO are very close to that of othermethods indicating that the computational methods arevalid for calculating the FOS of a slope Taking the first slopeas an example VMM calculated the FOS as 123 while theEM and the PSO in this study were estimated as 123 and124 respectively The result of employing the EM was thatit was more accurate Compared to the EM the error from
0 10 20 30 40 50 60
Iteration
Min
imum
fact
or o
f saf
ety
2035
2040
2045
2050
2055
2060
2065
2070
2075
Figure 5 Minimum FOS versus iterations
the PSO was also small indicating that the PSO is feasible forcalculating the FOS of a slope
In these calculations the step for each searching variablein the EM was 01m the swarm size of PSO of119873 was 20Themaximum iteration 119905max was 100 Under the same conditionssuch as the searching range the total iteration in the EM wasmuch larger than in the PSOWith regard to a large slope theiteration in EM could reach several tens of millions requiringsignificant computation time as shown in Table 2
Therefore compared with the EM the PSO had a smallercomputation error and it also reduced the computation timeIt is a more efficient and accurate method for calculating theFOS of a slope
The swarm size and iteration steps can significantlyaffect the computational results in the PSO To determinethe optimum swarm size and iteration steps this studycalculated several swarm sizes iteration steps and estimatedtheir influence on the convergence speed computation loadand the results
Using the second slope as an example letting119873 = 20 theminimumFOS and location of the particles were investigated
Computational Intelligence and Neuroscience 7
10
20
30
40
50yc
(m)
10
20
30
40
50
yc
(m)
10
20
30
40
50
yc
(m)
t = 1t = 10
10
20
30
40
50
yc
(m)
10
20
30
40
50
minus10 0 10 20 30
xc (m)minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
xc (m)
yc
(m)
10
20
30
40
50
yc
(m)
t = 30
t = 70 t = 100
t = 50
ParticlesGlobal best particle
ParticlesGlobal best particle
xc (m) xc (m)
xc (m) xc (m)
Figure 6 Positions of the particles of different iterations
8 Computational Intelligence and Neuroscience
Table 2 Comparison between EM and PSO
Number Method Iteration Computation time (s)
1 EM 10897394 871068PSO 100 0423
2 EM 73441 5292PSO 100 0423
3 EM 4328958 346002PSO 100 0417
4 EM 892133 70783PSO 100 0411
5 EM 4651688 376618PSO 100 0425
0 25 50 75 100 125 150 175 200
Iteration
Ave
rage
fitn
ess
200
205
210
215
220
225
230
235
240
245
250
N = 5
N = 10
N = 15
N = 20
N = 50
Figure 7 Convergence characteristics of PSO
as the variation in the iteration steps The results of thisanalysis can be seen in Figures 5 and 6 In Figure 5 it appearsthat the FOS of the slope decreased with the increase ofthe iteration and reached the minimum value at the 20thiteration In Figure 6 under the initial condition that is 119905 = 1particles dispersed around the global best particle With theincrease of iterations the particles gradually approached theglobal best particle Although the particles were concentratedin the final computation stage these particles were notclustered in the location of the global best particle which wasprimarily due to the particles being caught in the vicinity ofthe point with the local extreme value in the PSO
Thereafter letting 119905max = 200 this study analyzed theconvergence feature of the PSO with a swarm size 119873 of 510 15 20 and 50 The results are presented in Figure 7 Inthe figure it can be seen that the convergence results weregood for the swarm size of 15 20 and 50 Moreover fordifferent swarm sizes the convergence was attained before100 iterations indicating that the PSO converged quicklyTherefore when using the PSO to calculate the slope FOSselecting 119905max = 100 and 119873 = 20 should satisfy therequirements
1
3
2
20
15
10
5
0
minus5minus10 minus5 0 5 10 15 20 25 30 35
y(m
)
x (m)
A1
A5
Figure 8 Cross section of slope and computation results
20
15
10
5
0
minus5
minus10minus15 minus10 minus5 0 5 10 15 20 25 30 35 40
Method ordinary
Fs = 1145
Figure 9 Results of Swedish circle method
42Multistage Slope Calculation Figure 8 shows amultistageslope with the unit weight 120574 = 20 kNm3 cohesion 119888 =
10 kPa and internal friction angle 120593 = 20∘ Utilizing the PSOthe minimum FOS was calculated to be 1076 and the CSS issurface 1 in Figure 8 In addition two different slip surfaces atcompletely different locationswere calculatedwith the factorsof safety close to theminimumFOS as represented by surfaces3 in Figure 8 Their factors of safety were 1118 and 1156 Ifreinforcement was performed only to slip surface 1 the slopemight slide along surfaces 2 and 3
The overall FOS using the Swedish circle method in thesoftware was calculated to be 1145 as shown in Figure 9
Computational Intelligence and Neuroscience 9
If we used AM2 to calculate the overall FOS of the slopethe slope surface can be assumed to be the line of 119860
11198602
Here the calculated FOS was 1009 and the slip surface wasthe blue dashed line shown in Figure 9 In Figure 9 the redsolid line represents the calculated slip surface employingthe PSO presented in this study It can be seen in Figure 9that the calculated slide-in and slide-out points of the slipsurface calculated using the method presented in this paperprovided a close result to that obtained using the softwareThe calculated FOS 1118 was also close to the calculatedvalue obtained from the software that is 1145 which furthervalidated the accuracy of the method presented in this study
5 Conclusions and Further Research
(1) This paper selected the horizontal coordinate of anintercept between the slip surface and the slope topbottom surface and the vertical coordinate of thecenter of the critical arc as the searching variablesUsing the engineering practice to restrain the valuerange of the searching variables this study trans-formed the problem of solving for the minimumFOS of the slope into solving a constrained nonlinearprogramming problem The EM and the PSO wereeasily programmed to solve this problem
(2) The case study of a simple slope indicated that theEM and the PSO provided results that were close tothose obtained using the other established methodsIn addition the EM provided the better accuracy ofthe two Compared to the EM the PSO also hadsmall computation errors and significantly reducedthe computation load The PSO can efficiently andaccurately calculate the slope FOS
(3) In a case study of a multistage slope the methodpresented in this paper estimated the minimum FOSto be 1076 Two potential slip surfaces were alsocalculated with the factors of safety being 1118 and1156 respectively These proved to be close to theminimumFOS but the locations of these two surfaceswere very different from that of the CSS Thereforereinforcement should be carried out for all threesurfaces
(4) Through multiple calculations it was found that thePSO tended to converge quickly Use of the PSO tocalculate slope FOS with 119905max = 100119873 = 20 usuallysatisfies the computational requirement Howeverwith the PSO the particles could be easily caught atthe points with local extreme values demonstratingthat this technique requires further improvement
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Particular thanks are due to Chongxin Zhang and Yabo Zhoufor their assistance with derivation of equations
References
[1] A J Choobbasti F Farrokhzad and A Barari ldquoPredictionof slope stability using artificial neural network (case studyNoabad Mazandaran Iran)rdquo Arabian Journal of Geosciencesvol 2 no 4 pp 311ndash319 2009
[2] N Vatanpour M Ghafoori and H H Talouki ldquoProbabilisticand sensitivity analyses of effective geotechnical parameters onrock slope stability a case study of an urban area in northeastIranrdquo Natural Hazards vol 71 no 3 pp 1659ndash1678 2014
[3] R Kalatehjari N Ali M Kholghifard and M HajihassanildquoThe effects of method of generating circular slip surfaceson determining the critical slip surface by particle swarmoptimizationrdquo Arabian Journal of Geosciences vol 7 no 4 pp1529ndash1539 2014
[4] D-P Deng and L Li ldquoResearch on calculationmethods of slopestability under two types of sliding surfacerdquo Rock and SoilMechanics vol 34 no 2 pp 372ndash410 2013
[5] T B Zhang Earth Slope Stability Analysis and GeotechnologySlope Design Chengdu University of Science and TechnologyPress Chengdu China 1987
[6] G Y Yang ldquoAnalytical calculation of Fellenius method for soilslope stabilityrdquo Mechanics in Engineering vol 17 no 2 pp 59ndash61 1995
[7] J G Cao and M Z Musharraf ldquoShort communicationsanalytical method for analysis of slope stabilityrdquo InternationalJournal for Numerical and Analytical Methods in Geomechanicsvol 23 no 5 pp 439ndash449 1999
[8] B S Jiang M F Cai and A Z Lu ldquoAnalytical calculation ofslope stabilityrdquoChinese Journal of RockMechanics and Engineer-ing vol 23 no 16 pp 2726ndash2729 2004
[9] B S Jiang M F Cai and H Du ldquoAnalytical calculation onstability of slope with planar failure surfacerdquo Chinese Journal ofRock Mechanics and Engineering vol 23 no 1 pp 91ndash94 2004
[10] Y M Cheng T Lansivaara and W B Wei ldquoTwo-dimensionalslope stability analysis by limit equilibrium and strength reduc-tion methodsrdquo Computers and Geotechnics vol 34 no 3 pp137ndash150 2007
[11] P Cao K Zhang Y X Wang and H H Hu ldquoMixed searchalgorithm of critical slip surface of complex sloperdquo ChineseJournal of Rock Mechanics and Engineering vol 29 no 4 pp814ndash821 2010
[12] Z Z Ma H W Qi and X Y Hou ldquoA new roundly searchmethod for slope stability checkingrdquo Rock and Soil Mechanicsvol 21 no 3 pp 256ndash259 2000
[13] W H Lv H H Zhu and X J Li ldquoGA-based generalizedslope stability analysis methodrdquo Chinese Journal of GeotechnicalEngineering vol 27 no 5 pp 595ndash599 2005
[14] Z B Liu and Z H Wang ldquoMethod of determinating thelocation of center of critical circular failure surfacerdquo Journal ofChina Coal Society vol 22 no 6 pp 612ndash616 1997
[15] X-R Zhu Y-J Zhu and X-L Yao ldquoFinding globally criticalsurface by optimization method based on soil slope face gridsrdquoRock and Soil Mechanics vol 27 no 2 pp 252ndash256 2006
[16] Z Y Chen ldquoRandom trials used in determining global mini-mum factors of safety of slopesrdquoCanadianGeotechnical Journalvol 29 no 2 pp 225ndash233 1992
10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

Computational Intelligence and Neuroscience 7
10
20
30
40
50yc
(m)
10
20
30
40
50
yc
(m)
10
20
30
40
50
yc
(m)
t = 1t = 10
10
20
30
40
50
yc
(m)
10
20
30
40
50
minus10 0 10 20 30
xc (m)minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
minus10 0 10 20 30 minus10 0 10 20 30
xc (m)
yc
(m)
10
20
30
40
50
yc
(m)
t = 30
t = 70 t = 100
t = 50
ParticlesGlobal best particle
ParticlesGlobal best particle
xc (m) xc (m)
xc (m) xc (m)
Figure 6 Positions of the particles of different iterations
8 Computational Intelligence and Neuroscience
Table 2 Comparison between EM and PSO
Number Method Iteration Computation time (s)
1 EM 10897394 871068PSO 100 0423
2 EM 73441 5292PSO 100 0423
3 EM 4328958 346002PSO 100 0417
4 EM 892133 70783PSO 100 0411
5 EM 4651688 376618PSO 100 0425
0 25 50 75 100 125 150 175 200
Iteration
Ave
rage
fitn
ess
200
205
210
215
220
225
230
235
240
245
250
N = 5
N = 10
N = 15
N = 20
N = 50
Figure 7 Convergence characteristics of PSO
as the variation in the iteration steps The results of thisanalysis can be seen in Figures 5 and 6 In Figure 5 it appearsthat the FOS of the slope decreased with the increase ofthe iteration and reached the minimum value at the 20thiteration In Figure 6 under the initial condition that is 119905 = 1particles dispersed around the global best particle With theincrease of iterations the particles gradually approached theglobal best particle Although the particles were concentratedin the final computation stage these particles were notclustered in the location of the global best particle which wasprimarily due to the particles being caught in the vicinity ofthe point with the local extreme value in the PSO
Thereafter letting 119905max = 200 this study analyzed theconvergence feature of the PSO with a swarm size 119873 of 510 15 20 and 50 The results are presented in Figure 7 Inthe figure it can be seen that the convergence results weregood for the swarm size of 15 20 and 50 Moreover fordifferent swarm sizes the convergence was attained before100 iterations indicating that the PSO converged quicklyTherefore when using the PSO to calculate the slope FOSselecting 119905max = 100 and 119873 = 20 should satisfy therequirements
1
3
2
20
15
10
5
0
minus5minus10 minus5 0 5 10 15 20 25 30 35
y(m
)
x (m)
A1
A5
Figure 8 Cross section of slope and computation results
20
15
10
5
0
minus5
minus10minus15 minus10 minus5 0 5 10 15 20 25 30 35 40
Method ordinary
Fs = 1145
Figure 9 Results of Swedish circle method
42Multistage Slope Calculation Figure 8 shows amultistageslope with the unit weight 120574 = 20 kNm3 cohesion 119888 =
10 kPa and internal friction angle 120593 = 20∘ Utilizing the PSOthe minimum FOS was calculated to be 1076 and the CSS issurface 1 in Figure 8 In addition two different slip surfaces atcompletely different locationswere calculatedwith the factorsof safety close to theminimumFOS as represented by surfaces3 in Figure 8 Their factors of safety were 1118 and 1156 Ifreinforcement was performed only to slip surface 1 the slopemight slide along surfaces 2 and 3
The overall FOS using the Swedish circle method in thesoftware was calculated to be 1145 as shown in Figure 9
Computational Intelligence and Neuroscience 9
If we used AM2 to calculate the overall FOS of the slopethe slope surface can be assumed to be the line of 119860
11198602
Here the calculated FOS was 1009 and the slip surface wasthe blue dashed line shown in Figure 9 In Figure 9 the redsolid line represents the calculated slip surface employingthe PSO presented in this study It can be seen in Figure 9that the calculated slide-in and slide-out points of the slipsurface calculated using the method presented in this paperprovided a close result to that obtained using the softwareThe calculated FOS 1118 was also close to the calculatedvalue obtained from the software that is 1145 which furthervalidated the accuracy of the method presented in this study
5 Conclusions and Further Research
(1) This paper selected the horizontal coordinate of anintercept between the slip surface and the slope topbottom surface and the vertical coordinate of thecenter of the critical arc as the searching variablesUsing the engineering practice to restrain the valuerange of the searching variables this study trans-formed the problem of solving for the minimumFOS of the slope into solving a constrained nonlinearprogramming problem The EM and the PSO wereeasily programmed to solve this problem
(2) The case study of a simple slope indicated that theEM and the PSO provided results that were close tothose obtained using the other established methodsIn addition the EM provided the better accuracy ofthe two Compared to the EM the PSO also hadsmall computation errors and significantly reducedthe computation load The PSO can efficiently andaccurately calculate the slope FOS
(3) In a case study of a multistage slope the methodpresented in this paper estimated the minimum FOSto be 1076 Two potential slip surfaces were alsocalculated with the factors of safety being 1118 and1156 respectively These proved to be close to theminimumFOS but the locations of these two surfaceswere very different from that of the CSS Thereforereinforcement should be carried out for all threesurfaces
(4) Through multiple calculations it was found that thePSO tended to converge quickly Use of the PSO tocalculate slope FOS with 119905max = 100119873 = 20 usuallysatisfies the computational requirement Howeverwith the PSO the particles could be easily caught atthe points with local extreme values demonstratingthat this technique requires further improvement
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Particular thanks are due to Chongxin Zhang and Yabo Zhoufor their assistance with derivation of equations
References
[1] A J Choobbasti F Farrokhzad and A Barari ldquoPredictionof slope stability using artificial neural network (case studyNoabad Mazandaran Iran)rdquo Arabian Journal of Geosciencesvol 2 no 4 pp 311ndash319 2009
[2] N Vatanpour M Ghafoori and H H Talouki ldquoProbabilisticand sensitivity analyses of effective geotechnical parameters onrock slope stability a case study of an urban area in northeastIranrdquo Natural Hazards vol 71 no 3 pp 1659ndash1678 2014
[3] R Kalatehjari N Ali M Kholghifard and M HajihassanildquoThe effects of method of generating circular slip surfaceson determining the critical slip surface by particle swarmoptimizationrdquo Arabian Journal of Geosciences vol 7 no 4 pp1529ndash1539 2014
[4] D-P Deng and L Li ldquoResearch on calculationmethods of slopestability under two types of sliding surfacerdquo Rock and SoilMechanics vol 34 no 2 pp 372ndash410 2013
[5] T B Zhang Earth Slope Stability Analysis and GeotechnologySlope Design Chengdu University of Science and TechnologyPress Chengdu China 1987
[6] G Y Yang ldquoAnalytical calculation of Fellenius method for soilslope stabilityrdquo Mechanics in Engineering vol 17 no 2 pp 59ndash61 1995
[7] J G Cao and M Z Musharraf ldquoShort communicationsanalytical method for analysis of slope stabilityrdquo InternationalJournal for Numerical and Analytical Methods in Geomechanicsvol 23 no 5 pp 439ndash449 1999
[8] B S Jiang M F Cai and A Z Lu ldquoAnalytical calculation ofslope stabilityrdquoChinese Journal of RockMechanics and Engineer-ing vol 23 no 16 pp 2726ndash2729 2004
[9] B S Jiang M F Cai and H Du ldquoAnalytical calculation onstability of slope with planar failure surfacerdquo Chinese Journal ofRock Mechanics and Engineering vol 23 no 1 pp 91ndash94 2004
[10] Y M Cheng T Lansivaara and W B Wei ldquoTwo-dimensionalslope stability analysis by limit equilibrium and strength reduc-tion methodsrdquo Computers and Geotechnics vol 34 no 3 pp137ndash150 2007
[11] P Cao K Zhang Y X Wang and H H Hu ldquoMixed searchalgorithm of critical slip surface of complex sloperdquo ChineseJournal of Rock Mechanics and Engineering vol 29 no 4 pp814ndash821 2010
[12] Z Z Ma H W Qi and X Y Hou ldquoA new roundly searchmethod for slope stability checkingrdquo Rock and Soil Mechanicsvol 21 no 3 pp 256ndash259 2000
[13] W H Lv H H Zhu and X J Li ldquoGA-based generalizedslope stability analysis methodrdquo Chinese Journal of GeotechnicalEngineering vol 27 no 5 pp 595ndash599 2005
[14] Z B Liu and Z H Wang ldquoMethod of determinating thelocation of center of critical circular failure surfacerdquo Journal ofChina Coal Society vol 22 no 6 pp 612ndash616 1997
[15] X-R Zhu Y-J Zhu and X-L Yao ldquoFinding globally criticalsurface by optimization method based on soil slope face gridsrdquoRock and Soil Mechanics vol 27 no 2 pp 252ndash256 2006
[16] Z Y Chen ldquoRandom trials used in determining global mini-mum factors of safety of slopesrdquoCanadianGeotechnical Journalvol 29 no 2 pp 225ndash233 1992
10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

8 Computational Intelligence and Neuroscience
Table 2 Comparison between EM and PSO
Number Method Iteration Computation time (s)
1 EM 10897394 871068PSO 100 0423
2 EM 73441 5292PSO 100 0423
3 EM 4328958 346002PSO 100 0417
4 EM 892133 70783PSO 100 0411
5 EM 4651688 376618PSO 100 0425
0 25 50 75 100 125 150 175 200
Iteration
Ave
rage
fitn
ess
200
205
210
215
220
225
230
235
240
245
250
N = 5
N = 10
N = 15
N = 20
N = 50
Figure 7 Convergence characteristics of PSO
as the variation in the iteration steps The results of thisanalysis can be seen in Figures 5 and 6 In Figure 5 it appearsthat the FOS of the slope decreased with the increase ofthe iteration and reached the minimum value at the 20thiteration In Figure 6 under the initial condition that is 119905 = 1particles dispersed around the global best particle With theincrease of iterations the particles gradually approached theglobal best particle Although the particles were concentratedin the final computation stage these particles were notclustered in the location of the global best particle which wasprimarily due to the particles being caught in the vicinity ofthe point with the local extreme value in the PSO
Thereafter letting 119905max = 200 this study analyzed theconvergence feature of the PSO with a swarm size 119873 of 510 15 20 and 50 The results are presented in Figure 7 Inthe figure it can be seen that the convergence results weregood for the swarm size of 15 20 and 50 Moreover fordifferent swarm sizes the convergence was attained before100 iterations indicating that the PSO converged quicklyTherefore when using the PSO to calculate the slope FOSselecting 119905max = 100 and 119873 = 20 should satisfy therequirements
1
3
2
20
15
10
5
0
minus5minus10 minus5 0 5 10 15 20 25 30 35
y(m
)
x (m)
A1
A5
Figure 8 Cross section of slope and computation results
20
15
10
5
0
minus5
minus10minus15 minus10 minus5 0 5 10 15 20 25 30 35 40
Method ordinary
Fs = 1145
Figure 9 Results of Swedish circle method
42Multistage Slope Calculation Figure 8 shows amultistageslope with the unit weight 120574 = 20 kNm3 cohesion 119888 =
10 kPa and internal friction angle 120593 = 20∘ Utilizing the PSOthe minimum FOS was calculated to be 1076 and the CSS issurface 1 in Figure 8 In addition two different slip surfaces atcompletely different locationswere calculatedwith the factorsof safety close to theminimumFOS as represented by surfaces3 in Figure 8 Their factors of safety were 1118 and 1156 Ifreinforcement was performed only to slip surface 1 the slopemight slide along surfaces 2 and 3
The overall FOS using the Swedish circle method in thesoftware was calculated to be 1145 as shown in Figure 9
Computational Intelligence and Neuroscience 9
If we used AM2 to calculate the overall FOS of the slopethe slope surface can be assumed to be the line of 119860
11198602
Here the calculated FOS was 1009 and the slip surface wasthe blue dashed line shown in Figure 9 In Figure 9 the redsolid line represents the calculated slip surface employingthe PSO presented in this study It can be seen in Figure 9that the calculated slide-in and slide-out points of the slipsurface calculated using the method presented in this paperprovided a close result to that obtained using the softwareThe calculated FOS 1118 was also close to the calculatedvalue obtained from the software that is 1145 which furthervalidated the accuracy of the method presented in this study
5 Conclusions and Further Research
(1) This paper selected the horizontal coordinate of anintercept between the slip surface and the slope topbottom surface and the vertical coordinate of thecenter of the critical arc as the searching variablesUsing the engineering practice to restrain the valuerange of the searching variables this study trans-formed the problem of solving for the minimumFOS of the slope into solving a constrained nonlinearprogramming problem The EM and the PSO wereeasily programmed to solve this problem
(2) The case study of a simple slope indicated that theEM and the PSO provided results that were close tothose obtained using the other established methodsIn addition the EM provided the better accuracy ofthe two Compared to the EM the PSO also hadsmall computation errors and significantly reducedthe computation load The PSO can efficiently andaccurately calculate the slope FOS
(3) In a case study of a multistage slope the methodpresented in this paper estimated the minimum FOSto be 1076 Two potential slip surfaces were alsocalculated with the factors of safety being 1118 and1156 respectively These proved to be close to theminimumFOS but the locations of these two surfaceswere very different from that of the CSS Thereforereinforcement should be carried out for all threesurfaces
(4) Through multiple calculations it was found that thePSO tended to converge quickly Use of the PSO tocalculate slope FOS with 119905max = 100119873 = 20 usuallysatisfies the computational requirement Howeverwith the PSO the particles could be easily caught atthe points with local extreme values demonstratingthat this technique requires further improvement
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Particular thanks are due to Chongxin Zhang and Yabo Zhoufor their assistance with derivation of equations
References
[1] A J Choobbasti F Farrokhzad and A Barari ldquoPredictionof slope stability using artificial neural network (case studyNoabad Mazandaran Iran)rdquo Arabian Journal of Geosciencesvol 2 no 4 pp 311ndash319 2009
[2] N Vatanpour M Ghafoori and H H Talouki ldquoProbabilisticand sensitivity analyses of effective geotechnical parameters onrock slope stability a case study of an urban area in northeastIranrdquo Natural Hazards vol 71 no 3 pp 1659ndash1678 2014
[3] R Kalatehjari N Ali M Kholghifard and M HajihassanildquoThe effects of method of generating circular slip surfaceson determining the critical slip surface by particle swarmoptimizationrdquo Arabian Journal of Geosciences vol 7 no 4 pp1529ndash1539 2014
[4] D-P Deng and L Li ldquoResearch on calculationmethods of slopestability under two types of sliding surfacerdquo Rock and SoilMechanics vol 34 no 2 pp 372ndash410 2013
[5] T B Zhang Earth Slope Stability Analysis and GeotechnologySlope Design Chengdu University of Science and TechnologyPress Chengdu China 1987
[6] G Y Yang ldquoAnalytical calculation of Fellenius method for soilslope stabilityrdquo Mechanics in Engineering vol 17 no 2 pp 59ndash61 1995
[7] J G Cao and M Z Musharraf ldquoShort communicationsanalytical method for analysis of slope stabilityrdquo InternationalJournal for Numerical and Analytical Methods in Geomechanicsvol 23 no 5 pp 439ndash449 1999
[8] B S Jiang M F Cai and A Z Lu ldquoAnalytical calculation ofslope stabilityrdquoChinese Journal of RockMechanics and Engineer-ing vol 23 no 16 pp 2726ndash2729 2004
[9] B S Jiang M F Cai and H Du ldquoAnalytical calculation onstability of slope with planar failure surfacerdquo Chinese Journal ofRock Mechanics and Engineering vol 23 no 1 pp 91ndash94 2004
[10] Y M Cheng T Lansivaara and W B Wei ldquoTwo-dimensionalslope stability analysis by limit equilibrium and strength reduc-tion methodsrdquo Computers and Geotechnics vol 34 no 3 pp137ndash150 2007
[11] P Cao K Zhang Y X Wang and H H Hu ldquoMixed searchalgorithm of critical slip surface of complex sloperdquo ChineseJournal of Rock Mechanics and Engineering vol 29 no 4 pp814ndash821 2010
[12] Z Z Ma H W Qi and X Y Hou ldquoA new roundly searchmethod for slope stability checkingrdquo Rock and Soil Mechanicsvol 21 no 3 pp 256ndash259 2000
[13] W H Lv H H Zhu and X J Li ldquoGA-based generalizedslope stability analysis methodrdquo Chinese Journal of GeotechnicalEngineering vol 27 no 5 pp 595ndash599 2005
[14] Z B Liu and Z H Wang ldquoMethod of determinating thelocation of center of critical circular failure surfacerdquo Journal ofChina Coal Society vol 22 no 6 pp 612ndash616 1997
[15] X-R Zhu Y-J Zhu and X-L Yao ldquoFinding globally criticalsurface by optimization method based on soil slope face gridsrdquoRock and Soil Mechanics vol 27 no 2 pp 252ndash256 2006
[16] Z Y Chen ldquoRandom trials used in determining global mini-mum factors of safety of slopesrdquoCanadianGeotechnical Journalvol 29 no 2 pp 225ndash233 1992
10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience 9
If we used AM2 to calculate the overall FOS of the slopethe slope surface can be assumed to be the line of 119860
11198602
Here the calculated FOS was 1009 and the slip surface wasthe blue dashed line shown in Figure 9 In Figure 9 the redsolid line represents the calculated slip surface employingthe PSO presented in this study It can be seen in Figure 9that the calculated slide-in and slide-out points of the slipsurface calculated using the method presented in this paperprovided a close result to that obtained using the softwareThe calculated FOS 1118 was also close to the calculatedvalue obtained from the software that is 1145 which furthervalidated the accuracy of the method presented in this study
5 Conclusions and Further Research
(1) This paper selected the horizontal coordinate of anintercept between the slip surface and the slope topbottom surface and the vertical coordinate of thecenter of the critical arc as the searching variablesUsing the engineering practice to restrain the valuerange of the searching variables this study trans-formed the problem of solving for the minimumFOS of the slope into solving a constrained nonlinearprogramming problem The EM and the PSO wereeasily programmed to solve this problem
(2) The case study of a simple slope indicated that theEM and the PSO provided results that were close tothose obtained using the other established methodsIn addition the EM provided the better accuracy ofthe two Compared to the EM the PSO also hadsmall computation errors and significantly reducedthe computation load The PSO can efficiently andaccurately calculate the slope FOS
(3) In a case study of a multistage slope the methodpresented in this paper estimated the minimum FOSto be 1076 Two potential slip surfaces were alsocalculated with the factors of safety being 1118 and1156 respectively These proved to be close to theminimumFOS but the locations of these two surfaceswere very different from that of the CSS Thereforereinforcement should be carried out for all threesurfaces
(4) Through multiple calculations it was found that thePSO tended to converge quickly Use of the PSO tocalculate slope FOS with 119905max = 100119873 = 20 usuallysatisfies the computational requirement Howeverwith the PSO the particles could be easily caught atthe points with local extreme values demonstratingthat this technique requires further improvement
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Particular thanks are due to Chongxin Zhang and Yabo Zhoufor their assistance with derivation of equations
References
[1] A J Choobbasti F Farrokhzad and A Barari ldquoPredictionof slope stability using artificial neural network (case studyNoabad Mazandaran Iran)rdquo Arabian Journal of Geosciencesvol 2 no 4 pp 311ndash319 2009
[2] N Vatanpour M Ghafoori and H H Talouki ldquoProbabilisticand sensitivity analyses of effective geotechnical parameters onrock slope stability a case study of an urban area in northeastIranrdquo Natural Hazards vol 71 no 3 pp 1659ndash1678 2014
[3] R Kalatehjari N Ali M Kholghifard and M HajihassanildquoThe effects of method of generating circular slip surfaceson determining the critical slip surface by particle swarmoptimizationrdquo Arabian Journal of Geosciences vol 7 no 4 pp1529ndash1539 2014
[4] D-P Deng and L Li ldquoResearch on calculationmethods of slopestability under two types of sliding surfacerdquo Rock and SoilMechanics vol 34 no 2 pp 372ndash410 2013
[5] T B Zhang Earth Slope Stability Analysis and GeotechnologySlope Design Chengdu University of Science and TechnologyPress Chengdu China 1987
[6] G Y Yang ldquoAnalytical calculation of Fellenius method for soilslope stabilityrdquo Mechanics in Engineering vol 17 no 2 pp 59ndash61 1995
[7] J G Cao and M Z Musharraf ldquoShort communicationsanalytical method for analysis of slope stabilityrdquo InternationalJournal for Numerical and Analytical Methods in Geomechanicsvol 23 no 5 pp 439ndash449 1999
[8] B S Jiang M F Cai and A Z Lu ldquoAnalytical calculation ofslope stabilityrdquoChinese Journal of RockMechanics and Engineer-ing vol 23 no 16 pp 2726ndash2729 2004
[9] B S Jiang M F Cai and H Du ldquoAnalytical calculation onstability of slope with planar failure surfacerdquo Chinese Journal ofRock Mechanics and Engineering vol 23 no 1 pp 91ndash94 2004
[10] Y M Cheng T Lansivaara and W B Wei ldquoTwo-dimensionalslope stability analysis by limit equilibrium and strength reduc-tion methodsrdquo Computers and Geotechnics vol 34 no 3 pp137ndash150 2007
[11] P Cao K Zhang Y X Wang and H H Hu ldquoMixed searchalgorithm of critical slip surface of complex sloperdquo ChineseJournal of Rock Mechanics and Engineering vol 29 no 4 pp814ndash821 2010
[12] Z Z Ma H W Qi and X Y Hou ldquoA new roundly searchmethod for slope stability checkingrdquo Rock and Soil Mechanicsvol 21 no 3 pp 256ndash259 2000
[13] W H Lv H H Zhu and X J Li ldquoGA-based generalizedslope stability analysis methodrdquo Chinese Journal of GeotechnicalEngineering vol 27 no 5 pp 595ndash599 2005
[14] Z B Liu and Z H Wang ldquoMethod of determinating thelocation of center of critical circular failure surfacerdquo Journal ofChina Coal Society vol 22 no 6 pp 612ndash616 1997
[15] X-R Zhu Y-J Zhu and X-L Yao ldquoFinding globally criticalsurface by optimization method based on soil slope face gridsrdquoRock and Soil Mechanics vol 27 no 2 pp 252ndash256 2006
[16] Z Y Chen ldquoRandom trials used in determining global mini-mum factors of safety of slopesrdquoCanadianGeotechnical Journalvol 29 no 2 pp 225ndash233 1992
10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

10 Computational Intelligence and Neuroscience
[17] W Wan P Cao T Feng and H-P Yuan ldquoAnalysis of slopestability for underground vacant areas based on improvedgenetic algorithmrdquo Rock and Soil Mechanics vol 27 no 11 pp2015ndash2019 2006
[18] M-Q You ldquoAnalysis of homogeneous soil slope slipping incircular arcrdquo Rock and Soil Mechanics vol 29 no 8 pp 2025ndash2032 2008
[19] Y M Cheng ldquoGlobal optimization analysis of slope stability bysimulated annealing with dynamic bounds andDirac functionrdquoEngineering Optimization vol 39 no 1 pp 17ndash32 2007
[20] L Li S-C Chi and G Lin ldquoImproved complex method basedon particle swarm optimization algorithm and its application toslope stability analysisrdquo Rock and Soil Mechanics vol 26 no 9pp 1393ndash1398 2005
[21] W Wan P Cao T Feng and H-P Yuan ldquoSearching for themost dangerous failure surface of complex slope based on accel-erating hybrid genetic algorithmrdquo Chinese Journal of Geotechni-cal Engineering vol 28 no 4 pp 475ndash479 2006
[22] G D Zou ldquoA global optimization method of the slice methodfor slope stability analysisrdquo Chinese Journal of GeotechnicalEngineering vol 24 no 3 pp 309ndash312 2002
[23] Z H Dai and P S Shen ldquoNumerical solution of simplifiedBishopmethod for stability analysis of soil slopesrdquoRock and SoilMechanics vol 23 no 6 pp 760ndash764 2002
[24] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
[25] H T Ye W G Luo and Z Q Li ldquoConvergence analysis of par-ticle swarm optimizer and its improved algorithm based onvelocity differential evolutionrdquo Computational Intelligence andNeuroscience vol 2013 Article ID 384125 7 pages 2013
[26] F-F Wang and C-T Su ldquoEnhanced fuzzy-connective-basedhierarchical aggregation network using particle swarm opti-mizationrdquo Engineering Optimization vol 46 no 11 pp 1501ndash1519 2014
[27] Y Shi and R C Eberhart ldquoParameter selection in particleswarm optimizationrdquo in Proceedings of the 7th Annual Confer-ence on Evolutionary Programming pp 591ndash600 Springer NewYork NY USA December 1998
[28] J Robinson andY Rahmat-Samii ldquoParticle swarmoptimizationin electromagneticsrdquo IEEE Transactions on Antennas and Prop-agation vol 52 no 2 pp 397ndash407 2004
[29] Y Shi and R C Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 Anchorage AlaskaUSA May 1998
[30] Y M Cheng L Li S-C Chi and W B Wei ldquoParticle swarmoptimization algorithm for the location of the critical non-circular failure surface in two-dimensional slope stability analy-sisrdquo Computers and Geotechnics vol 34 no 2 pp 92ndash103 2007
[31] Y M Cheng L Li and S C Chi ldquoPerformance studies on sixheuristic global optimization methods in the location of criticalslip surfacerdquoComputers and Geotechnics vol 34 no 6 pp 462ndash484 2007
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] D G Fredlund and J Krahn ldquoComparison of slope stabilitymethods of analysisrdquoCanadianGeotechnical Journal vol 14 no3 pp 429ndash439 1977
[34] W-J Niu ldquoDetermination of slope safety factor with analyt-ical solution and searching critical slip surface with genetic-traversal random methodrdquo The Scientific World Journal vol2014 Article ID 950531 13 pages 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Related Documents











