State space representations (SEM) O.Sename Introduction Modelling of dynamical systems Properties Discrete-time systems State feedback control Observer Integral Control A polynomial approach Further in discrete-time control Conclusion Modelling, analysis and control of linear systems using state space representations O. Sename 1 1 Gipsalab, CNRS-INPG, FRANCE [email protected] www.lag.ensieg.inpg.fr/sename Approche Etat pour la commande / IEG- SEM

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Modelling, analysis and control of linearsystems using state space
representations
O. Sename1
1Gipsalab, CNRS-INPG, [email protected]
www.lag.ensieg.inpg.fr/sename
Approche Etat pour la commande / IEG- SEM

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Outline
Introduction
Modelling of dynamical systems
Properties
Discrete-time systems
State feedback control
Observer
Integral Control
A polynomial approach
Further in discrete-time control
Conclusion
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
References
Some interesting books:◮ K.J. Astrom and B. Wittenmark, Computer-Controlled
Systems, Information and systems sciences series.Prentice Hall, New Jersey, 3rd edition, 1997.
◮ R.C. Dorf and R.H. Bishop, Modern Control Systems,Prentice Hall, USA, 2005.
◮ G.C. Goodwin, S.F. Graebe, and M.E. Salgado,Control System Design, Prentice Hall, New Jersey,2001.
◮
◮

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Objective of any control system:
Nominal stability (NS): The system is stable with thenominal model (no model uncertainty)
Nominal Performance (NP): The system satisfies theperformance specifications with the nominalmodel (no model uncertainty)
Robust stability (RS): The system is stable for allperturbed plants about the nominal model, upto the worst-case model uncertainty(including the real plant)
Robust performance (RP): The system satisfies theperformance specifications for all perturbedplants about the nominal model, up to theworst-case model uncertainty (including thereal plant).

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Recall of the "control design" process:◮ Plant study and modelling◮ Determination of sensors and actuators (measured
and controlled outputs, control inputs)◮ Performance specifications◮ Control design (many methods)◮ Simulation tests◮ Implementation, tests and validation
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Different issues for modelling:Identification based method
◮ System excitations using PRBS (Pseudo RandomBinary Signal) or sinusoïdal signals
◮ Determination of a transfer function reproducing theinput/ouput system behavior
Knowledge-based method:◮ Represent the system behavior using differential
and/or algebraic equations, based on physicalknowledge.
◮ Formulate a nonlinear state-space model, i.e. a matrixdifferential equation of order 1.
◮ Determine the steady-state operating point aboutwhich to linearize.
◮ Introduce deviation variables and linearize the model.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Why state space equations ?◮ dynamical systems where physical equations can be
derived : electrical engineering, mechanicalengineering, aerospace engineering, microsystems,process plants ....
◮ include physical parameters: easy to use whenparameters are changed for design
◮ State variables have physical meaning.◮ Easy to extend to Multi-Input Multi-Output (MIMO)
systems◮ Advanced control design method are based on state
space equations (reliable numerical optimisation tools)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Some physical examples

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
General dynamical system
Many dynamical systems can be represented by OrdinaryDifferential Equations (ODE) as
{
x(t) = f ((x(t),u(t), t), x(0) = x0
y(t) = g((x(t),u(t), t)(1)
where f and g are non linear functions.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Example: Inverted pendulumIt is described by:
Parameters:

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Example: Inverted pendulum
The dynamical equations are as follows:

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Example: Lateral vehicle model
The dynamical equations are as follows:

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Definition of state space representations
A continuous-time LINEAR state space system is givenas : {
x(t) = A(x(t)+Bu(t), x(0) = x0
y(t) = Cx(t)+Du(t)(2)
where x(t) ∈ Rn is the system state (vector of state
variables), u(t) ∈ Rm the control input and y(t) ∈ R
p themeasured output. A, B, C and D are real matrices ofappropriate dimensions. x0 is the initial condition.n is the order of the state space representation.Matlab : ss(A,B,C,D) creates a SS objectSYS representing a continuous-timestate-space model

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
A first example: DC Motor
The dynamical equations are :
Ri +Ldidt
+e = u e = Keω
Jdωdt
= −f ω + Γm Γm = Kc i
System of 2 equations of order 1 =⇒ 2 state variables. A
possible choice x =
(ωi
)
It gives:
A =
(−f/J Kc/J−Ke/L −R/L
)
B =
(0
1/L
)
C =(
0 1)
Extension: measurment= motor angular position

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Example : Wind turbine

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
A linearisation within 2 regions gives{
x(t) = Ax(t)+Bu(t)+Ed(t)y(t) = Cx(t)
with
A =
γ−CdIrot
−1Irot
CdIrot
Kd 0 −KdCdIgen
−1Igen
CdIgen
, B =
00−1Igen
,E =
αIrot
00
,
and C =(
0 0 1)
x1 = rotor-speed x2 = drive-train torsion spring force, x3=rotational generator speedu = generator torque, d : wind speedIrot : rotor rotational inertia, Igen : generator rotational inertia, Kd :spring constant, Cd : torsional damping constant, α partialderivative of rotor aerodynamic torque with respect blade pitchangle, γ: partial derivative of rotor aerodynamic torque withrespect to rotor speed

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Examples: SuspensionLet the following mass-spring-damper system.
where x1 is the relative position, M1 the system mass, k1
the spring coefficient, u the force generated by the activedamper, and F1 is an external disturbance. Applying themechanical equations it leads:
M1x1 = −k1x1 +u +F1 (3)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Examples: Suspension cont.
The choice x =
(x1
x1
)
gives
{x(t) = Ax(t)+Bu(t)+Ed(t)y(t) = Cx(t)
where d = F1 , y = x1 with
A =
(0 1
−k1/M1 0
)
, B = E =
(0
1/M1
)
,and C =(
0 1)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Exercice
Let the following quarter car model with active suspension.
Zcaisse and Zroue) are the relativeposition of the chassis and of thetire,mc (resp. mr ) the mass of the chas-sis (resp. of the tire),k (resp. kp) the spring coefficient ofthe suspension (of the tire),u the active damper force,Zsol is the road profile.
Choose some state variables and give a state spacerepresentation of this system

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Linearisation

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Equilibrium point
An equilibrium point satisfies:
0 = f ((xeq(t),ueq(t), t) (4)
For the pendulum, we can choose y = θ = f = 0.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Linearisation Method (1)
The linearisation can be done around an equilibrium pointor around a particular point.
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Linearisation Method (2)
This leads to a linear state space representation of thesystem, around the equilibrium point.Defining x = x −xeq, u = u−ueq and y = y −yeq we get
{˙x(t) = Ax(t)+Bu(t),
y(t) = Cx(t)+Du(t)(5)
with A = ∂ f∂x |x=xeq ,u=ueq , B = ∂ f
∂u |x=xeq ,u=ueq ,
C = ∂g∂x |x=xeq ,u=ueq and D = ∂g
∂u |x=xeq ,u=ueq

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Example: Inverted pendulum (2)
Applying the linearisation method leads to :

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Linear systems :transfer function

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Equivalence transfer function - state spacerepresentation
Consider a linear system given by:{
x(t) = Ax(t)+Bu(t), x(0) = x0
y(t) = Cx(t)+Du(t)(6)
Using the Laplace transform (and assuming zero initialcondition x0 = 0), (6) becomes:
s.x(s) = Ax(s)+Bu(s) ⇒ (s.In −A)x(s) = Bu(s)
Then the transfer function matrix of system (6) is given by
G(s) = C(sIn −A)−1B +D =N(s)
D(s)(7)
Matlab: if SYS is an SS object, then tf(SYS) gives theassociated transfer matrix. Equivalent to tf(N,D)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Conversion TF to SS
There mainly three cases to be considered
Simple numerator
yu
= G(s) =1
s3 +as12+a2s +a3
Numerator order less than denominator order
yu
= G(s) =b1s2 +b2s +b3
s3 +as12+a2s +a3
=N(s)
D(s)
Numerator equal to denominator order
yu
= G(s) =b0s3 +b1s2 +b2s +b3
s3 +as12+a2s +a3
=N(s)
D(s)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Canonical forms

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Canonical forms
Some specific state space representations are well-knownand often used as the so-called controllable canonical form
A =
0 1 0 . . . 00 0 1 0 . . ....
......
. . ....
0... 0 1
−a0 −a1 . . . . . . −an−1
, B =
0......01
and
C =[
c0 c1 . . . cn−1].
It corresponds to the transfer function:
G(s) =c0 +c1s + . . .+cn−1sn−1
a0 +a1s + . . .+an−1sn−1 +sn
In Matlab, use canon

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Modal formLet us consider a transfer funtion as:
G(s) =b1
s−a1+
b2
s−a2+ . . .+
bn
s−an
◮ Define a set of transfer functions:
Xi(s)
U(s)=
bi
s−ai⇒ xi = aixibiui
◮ This gives{
x(t) = Ax(t)+Bu(t), x(0) = x0
y(t) = Cx(t)+Du(t)(8)
with A =
a1 0 . . . 0
0 a2 0...
0. . . . . . 0
0 . . . 0 an
, B =
b1
b2...
bn
and
C =[
1 1 1 1].

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Solution of state spacelinear systems

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Solution of state space equations - continuouscase
The state x(t), solution of x(t) = Ax(t), with initialcondition x(0) = x0 is given by
x(t) = eAtx(0) (9)
This requires to compute eAt . There exist 3 methods tocompute eAt :
1. Inverse Laplace transform of (sIn −A)−1 :
2. Diagonalisation of A
3. Cayley-Hamilton method

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Complete state solution
The state x(t), solution of system (6), is given by
x(t) = eAtx(0)︸ ︷︷ ︸
free response
+
∫ t
0eA(t−τ)Bu(τ)dτ
︸ ︷︷ ︸
forced response
(10)
In Matlab : use expm and not exp.
Simulation of state space systemsUse lsim.Example:t = 0:0.01:5; u = sin(t); lsim(sys,u,t)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Non unicity

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Non unicityGiven a transfer function, there exists an infinity of statespace representations (equivalent in terms of input-outputbehavior). Let
{x(t) = Ax(t)+Bu(t),y(t) = Cx(t)+Du(t)
(11)
the transfer matrix being G(s) = C(sIn −A)−1B +D, andconsider the change of variables x = Tz (T being aninvertible matrix). Replacing x = Tz in the previous systemgives:
T z(t) = ATz(t)+Bu(t) (12)
y(t) = CTz(t)+Du(t) (13)
Hence
z(t) = T−1ATz(t)+T−1Bu(t) (14)
y(t) = CTz(t)+Du(t) (15)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Defining A = T−1AT , B = T−1B and C = CT , the transferfunction of the previous system is:
G(s) = C(sIn − A)−1B +D (16)
= C T (sIn −T−1AT )−1 T−1 B +D (17)
(18)
Using In = T−1T , we get
G(s) = C T T−1 (sIn −A)−1 T T−1 B +D = G(s) (19)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Stability
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Stability
DefinitionAn equilibrium point xeq is stable if, for all ρ > 0, thereexists a η > 0 such that:
‖x(0)−xeq‖ < η =⇒‖x(t)−xeq‖ < ρ ,∀t ≥ 0
DefinitionAn equilibrium point xeq is asymptotically stable if it isstable and, there exists η > 0 such that:
‖x(0)−xeq‖ < η =⇒ x(t) → xeq , when t → ∞
These notions are equivalent for linear systems (not fornon linear ones).
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Stability Analysis
The stability of a linear state space system is analyzedthrough the characteristic equation det(sIn −A) = 0.The system poles are then the eigenvalues of the matrix A.It then follows:
PropositionA system x(t) = Ax(t), with initial condition x(0) = x0, isstable if Re(λi) < 0, ∀i , where λi , ∀i , are the eigenvalues ofA.
Using Matlab, if SYS is an SS object then pole(SYS)computes the poles P of the LTI model SYS. It isequivalent to compute eig(A).

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Stability Analysis - LyapunovThe stability of a linear state space system can beanalysed through the Lyapunov theory.It is the basis of all extension of stability for non linearsystems, time-delay systems, time-varying systems ...
TheoremA system x(t) = Ax(t), with initial condition x(0) = x0, isasymoptotically stable at x = 0 if and only if there existsome matrices P = PT > 0 and Q > 0 such that:
AT P +PA = −Q (20)
see lyap in MATLAB.Proof: The Lyapunov theory says that a linear system isstable if there exists a continuous function V (x) s.t.:
V (x) > 0 with V (0) = 0 and V (x) =dVdx
≥ 0
A possible Lyapunov function for the above system is :

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
About zeros
◮ Roots of the transfer function numerator are called thesystem zeros.
◮ Need to develop a similar way of defining/computingthem using a state space model.
◮ Zero: is a generalized frequency α for which thesystem can have a non-zero input u(t) = u0eα t , butexactly zero output y(t) = 0.
◮ The zeros are found by solving:[
A−λ In BC D
]
= 0 (21)
In Matlab use zero
Example: find the zero of : s+3s2+5s+2

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Controllability

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Controllability
Controllability refers to the ability of controlling astate-space model using state feedback.
DefinitionGiven two states x0 and x1, the system (6) is controllable ifthere exist t1 > 0 and a piecewise-continuous control inputu(t), t ∈ [0, t1], such that x(t) takes the values x0 for t = 0and x1 for t = t1.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Controllability cont.
PropositionThe controllability matrix is defined byC = [B,A.B, . . . ,An−1.B]. Then system (6) is controllable ifand only if rank(C ) = n.If the system is single-input single output (SISO), it isequivalent to det(C ) 6= 0.
Using Matlab, if SYS is an SS object then crtb(SYS)returns the controllability matrix of the state-space modelSYS with realization (A,B,C,D). This is equivalent toctrb(sys.a,sys.b)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Exercices
Test the controllability of the previous examples: DC motor,suspension, inverted pendulum.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Observability

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Observability
Observability refers to the ability to estimate a statevariable.
DefinitionA linear system (2) is completely observable if, given thecontrol and the output over the interval t0 ≤ t ≤ T , one candetermine any initial state x(t0).It is equivalent to characterize the non-observability as :A state x(t) is not observable if the corresponding outputvanishes, i.e. if the following holds:y(t) = y(t) = y(t) = . . . = 0

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Where does observability come from ?
Compare the transfer function of the two different systems*
x = −x +u
y = 2x
and
x =
[−1 00 −2
]
x +
[11
]
u
y =[
2 0]x

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Observability cont.
Proposition
The observability matrix is defined by O =
CCA...
CAn−1
.
Then system (6) is observable if and only if rank(O) = n.If the system is single-input single output (SISO), it isequivalent to det(O) 6= 0.
Using Matlab, if SYS is an SS object then obsv(SYS)returns the observability matrix of the state-space modelSYS with realization (A,B,C,D). This is equivalent toOBSV(sys.a,sys.c).

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Exercices
Test the observability of the previous examples: DC motor,suspension, inverted pendulum.Analysis of different cases, according to the considerednumber of sensors.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Minimality

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Minimality
DefinitionA state space representation of a linear system (2) of ordern is said to be minimal if it is controllable and observable.
In this case, the corresponding transfer function G(s) is ofminimal order n, i.e is irreducible (no cancellation of polesand zeros).When the transfer function is not of minimal order, thereexists non controllable or non observable modes.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Kalman decomposition

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Kalman decomposition
When the linear system(2) is not completelycontrollable or observ-able, it can be decom-posed as shown. Usectrbf and obsvf inMatlab.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Toward digital control
Digital controlUsually controllers are implemented in a digital computeras:
This requires the use of the discrete theory.m (Sampling theory + Z-Transform) m

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Z-Transform

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Definitions
Mathematical definitionBecause the output of the ideal sampler, x∗(t), is a seriesof impulses with values x(kTe), we have:
x∗(t) =∞
∑k=0
x(kTe)δ (t −kTe)
by using the Laplace transform,
L [x∗(t)] =∞
∑k=0
x(kTe)e−ksTe
Noting z = esTe , we can derive the so called Z-Transform
X (z) = Z [x(k)] =∞
∑k=0
x(k)z−k

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Properties
Definition
X (z) = Z [x(k)] =∞
∑k=0
x(k)z−k
Properties
Z [αx(k)+ βy(k)] = αX (z)+ βY (z)
Z [x(k −n)] = z−nZ [x(k)]
Z [kx(k)] = −zddz
Z [x(k)]
Z [x(k)∗y(k)] = X (z).Y (z)
limk→∞
x(k) = lim1→z−1
(z −1)X (z)
The z−1 can be interpreted as a pure delay operator.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
ExerciseDetermine the Z-Transform of the step function (1) and ofthe ramp function (2)
xstep(k) = 1 if k ≥ 0 xramp(k) = k if k ≥ 0= 0 if k < 0 = 0 if k < 0

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
ExerciseDetermine the Z-Transform of the step function (1) and ofthe ramp function (2)
xstep(k) = 1 if k ≥ 0 xramp(k) = k if k ≥ 0= 0 if k < 0 = 0 if k < 0
Solution1) Step
Xstep(z) = 1+z−1 +z−2 + · · · =1
1−z−1 =z
z −1
2) Ramp (note that xramp(k) = kxstep(k))
Xramp(z) = −zddz
( zz −1
)
=z
(z −1)2

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Zero order holder
Sampler and Zero order holderA sampler is a switch that close every Te seconds.A Zero order holder holds the signal x for Te seconds toget h as:
h(t +kTe) = x(kTe), 0 ≤ t < Te

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Zero order holder (cont’d)
Model of the Zero order holderThe transfer function of the zero-order holder is given by:
GBOZ (s) =1s−
e−sTe
s
=1−e−sTe
s
Influence of the D/A and A/DNote that the precision is also limited by the availableprecision of the converters (either A/D or D/A).This error is also called the amplitude quantization error.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Representation of the discrete linear systemsThe discrete output of a system can be expressed as:
y(k) =∞
∑n=0
h(k −n)u(n)
hence, applying the Z-transform leads to
Y (z) = Z [h(k)]U(z) = H(z)U(z)
H(z) =b0 +b1z + · · ·+bmzm
a0 +a1z + · · ·+anzn =YU
where n (≥ m) is the order of the systemCorresponding difference equation:
y(k) =1an
[b0u(k −n)+b1u(k −n +1)+ · · ·+bmu(k −n +m)
− a0y(k −n)−a2y(k −n +1)−·· ·−an−1y(k −1)]

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Some useful transformations
x(t) X(s) X(z)δ (t) 1 1
δ (t −kTe) e−ksTe z−k
u(t) 1s
zz−1
t 1s2
zTe(z−1)2
e−at 1s+a
zz−e−aTe
1−e−at 1s(s+a)
z(1−e−aTe )
(z−1)(z−e−aTe )
sin(ω t) ωs2+ω2
zsin(ωTe)
z2−2zcos(ωTe)+1
cos(ω t) ss2+ω2
z(z−cos(ωTe))
z2−2zcos(ωTe)+1
ExerciseDiscretize (sampling time Te) the system described by theLaplace function (using a Zero order holder):
H(s) =Y (s)
U(s)=
1s(s +1)
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
ExerciseDiscretize the system described by the Laplace function(using a Zero order holder):
H(s) =Y (s)
U(s)=
1s(s +1)
Adding the Zero order holder leads to:
GBOZ (s)H(s) =1−e−sTe
s1
s(s +1)
=1−e−sTe
s2(s +1)
= (1−e−sTe)( 1
s2 −1s
+1
s +1
)
hence
Z [GBOZ (s)H(s)] = (1−z−1)Z[ 1s2 −
1s
+1
s +1
]

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Exercise (cont’d)
Z [GBOZ (s)H(s)] = (1−z−1)Z[ 1s2 −
1s
+1
s +1
]
= (1−z−1)[ zTe
(z −1)2 −z
z −1+
zz −e−Te
]
=(ze−Te −z +zTe)+ (1−e−Te −Tee−Te)
(z −1)(z −e−Te)
if Te = 1, we have
Z [GBOZ (s)H(s)] =(ze−Te −z +zTe)+ (1−e−Te −Tee−Te)
(z −1)(z −e−Te)
=ze−1 +1−2e−1
(z −1)(z −e−1)
=b1z +b0
z2 +a1z +a0

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Exercise (cont’d)Let us return back to sampled-time domain
Y (z)U(z) = b1z+b0
z2+a1z+a0
⇔ Y (z) = b1z+b0z2+a1z+a0
U(z)
⇔ Y (z)(z2 +a1z +a0) = (b1z +b0)U(z)⇔ y(n +2)+a1y(n +1)+a0y(n) = b1u(n +1)+b0u(n)
With an unit feedback, the closed loop function is given by:
Fcl(z) =G(z)
1+G(z)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Poles, Zeros andStability

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Equivalence {s} ↔ {z}
{s}→ {z}The equivalence between the Laplace domain and the Zdomain is obtained by the following transformation:
z = esTe
Two poles with a imaginary part witch differs of 2π/Te givethe same pole in Z.
Stability domain

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Approximations
Forward difference (Rectangle inferior)
s =z −1Te
Backward difference (Rectangle superior)
s =z −1zTe

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Approximations (cont’d)
Trapezoidal difference (Tustin)
s =2Te
z −1z +1
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Systems definition
A discrete-time state space system is as follows:{
x((k +1)h) = Adx(kh)+Bdu(kh), x(0) = x0
y(kh) = Cdx(kh)+Dd u(kh)(22)
where h is the sampling period.Matlab : ss(Ad,Bd,Cd,Dd,h) creates a SSobject SYS representing a discrete-timestate-space model

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Relation with transfer function
For discrete-time systems,{
x((k +1)h) = Ad x(kh)+Bdu(kh), x(0) = x0
y(kh) = Cdx(kh)+Ddu(kh)(23)
the discrete transfer function is given by
G(z) = Cd(zIn −Ad)−1Bd +Dd (24)
where z is the shift operator, i.e. zx(kh) = x((k +1)h)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Recall Laplace & Z-transform
From Transfer Function to State Space
H(s) to state space H(z) to state space
XU = den(s) X
U = den(z)YX = num(s) Y
X = num(z)
X = AX +BU Xk+1 = FXk +GUkY = CX +DU Yk = CXk +DUk
Y (s) =[C[sI−A]−1B +D
]
︸ ︷︷ ︸
H(s)
U(s) Y (z) =[C[zI−F ]−1G +D
]
︸ ︷︷ ︸
H(z)
U(z)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Solution of state space equations - discretecase
The state xk , solution of system xk+1 = Adxk with initialcondition x0, is given by
x1 = Adx0 (25)
x2 = A2dx0 (26)
xn = Andx0 (27)
The state xk , solution of system (22), is given by
x1 = Adx0 +Bdu0 (28)
x2 = A2dx0 +AdBdu0 +Bdu1 (29)
xn = Andx0 +
n−1
∑i=0
An−1−id Bdui (30)
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
State space analysis (discrete-time systems)
StabilityA system (state space representation) is stable iff all theeigenvalues of the matrix F are inside the unit circle.
Controllability definition
DefinitionGiven two states x0 and x1, the system (22) is controllableif there exist K1 > 0 and a sequence of control samplesu0,u1, . . . ,uK1
, such that xk takes the values x0 for k = 0and x1 for k = K1.
Observability definition
DefinitionThe system (22) is said to be completely observable ifevery initial state x(0) can be determined from theobservation of y(k) over a finite number of samplingperiods.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
State space analysis (2)
ControllabilityThe system is controllable iff
C⌈(Ad ,Bd )= rg[Bd AdBd . . .An−1
d Bd ] = n
ObservabilityThe system is observable iff
O(Ad ,Cd ) = rg[Cd Cd Ad . . .CdAn−1d ]T = n
DualityObservability of (Cd ,Ad) ⇔ Controllability of (AT
d ,CTd ).
(proof. . . )Controllability of (Ad ,Bd ) ⇔ Observability of (BT
d ,ATd ).
(proof. . . )

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
State feedback
A state feedback controller for a continuous-time system is:
u(t) = −Fx(t) (31)
where F is a m×n real matrix.When the system is SISO, it corresponds to :u(t) = −f1x1 − f2x2 − . . .− fnxn with F = [f1, f2, . . . , fn].When the system is MIMO we have
u1
u2...
um
=
f11 . . . f1n...
...fm1 . . . fmn
x1
x2...
xn

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
State feedback (2)
Using state feedback controllers (31), we get inclosed-loop (for simplicity D = 0)
{x(t) = (A−BF )x(t),y(t) = Cx(t)
(32)
and the stability (and dynamics) of the closed-loop systemis then given by the eigenvalues of A−BF .For discrete-time system we get:
{x(k +1) = (A−BF )x(k),y(k) = Cx(k)
(33)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
State feedback (3)When the objective is to track some reference signal r , thestate feedback control is of the form:
u(t) = −Fx(t)+Gr(t) (34)
or u(k) = −Fx(k)+Gr(k) (35)
G is a m×p real matrix. Then the closed-loop transfermatrix is :
GCL(s) = C(sIn −A+BF )−1BG (36)
G is chosen to ensure a unitary steady-state gain as:
G = [C(−A+BF )−1B]−1 (37)
⋆ For discrete-time system:
G = [C(In −A+BF )−1B]−1 (38)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Pole placement control
PropositionLet a linear system given by A, B, and let γi , i = 1, ...,n , aset of complex elements (i.e. the desired poles of theclosed-loop system). There exists a state feedback controlu = −Fx such that the poles of the closed-loop system areγi , i = 1, ...,n if and only if the pair (A,B) is controllable.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Why state feedback and not output feedback?
Example: G(s) = 1s2−s
Consider the canonical form.Case of output feedback : u = −LyThen x(t) = (A−BLC)x(t)For the example, the characteristic polynomial isPBF (s) = s2 −s−L. The closed-loop system cannot bestabilized.Case of state feedback : u = −FxLet F = [f1, f2]. Then PBF (s) = s2 +(−1+ f2)s + f1So we can choose any F . For instance f1 = 1, f2 = 3 givesPBF (s) = (s +1)2
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Pole placement control (1)
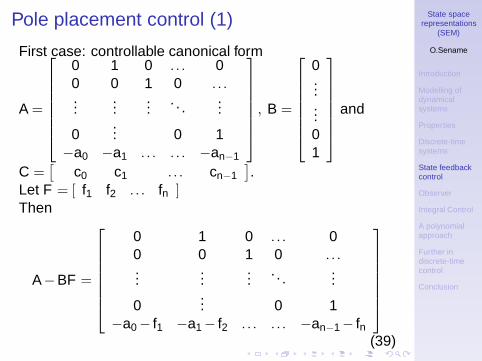
First case: controllable canonical form
A =
0 1 0 . . . 00 0 1 0 . . ....
......
. . ....
0... 0 1
−a0 −a1 . . . . . . −an−1
, B =
0......01
and
C =[
c0 c1 . . . cn−1].
Let F = [ f1 f2 . . . fn ]Then
A−BF =
0 1 0 . . . 00 0 1 0 . . ....
......
. . ....
0... 0 1
−a0 − f1 −a1 − f2 . . . . . . −an−1− fn
(39)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Pole placement control (2)
Consider the desired clos-ed-loop polynomial:(s− γ1)(s− γ2)...(s− γn) = sn + αn−1sn−1 + . . .+ α1s + α0
The solution:
fi = −ai−1 + αi−1, i = 1, ..,n
ensures that the poles of A−BF are {γi}, i = 1,nWhen we consider a general state space representation, itis first necessary to use a change of basis to make thesystem under canonical form.Use F=acker(A,B,P)where P is the set of desiredclosed-loop poles.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Pole placement control (3)Procedure for the general case:
1. Check controllability of (A, B)2. Calculate C = [B,AB, . . . ,An−1B].
Note C−1 =
q1...
qn
. Define T =
qn
qnA...
qnAn−1
−1
3. Note A = T−1AT and B = T−1B (which are under thecontrollable canonical form)
4. Choose the desired closed-loop poles and define thedesired closed-loop characteristic polynomial:sn + αn−1sn−1 + . . .+ α1s + α0
5. Calculate the state feedback u = −F x with:
fi = −ai−1 + αi−1, i = 1, ..,n
6. Calculate (for the original system):
u = −Fx , with F = FT−1

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Observer
Problem: To implement a state feedback control, themeasurement of all the state variables is necessary. If thisis not available, we will use a state estimation through aso-called Observer.Observer form:
˙x(t) = Ax(t)+Bu(t)−L(Cx(t)−y(t))x0
(40)
where x(t) ∈ Rn is the estimated state of x(t) and L is the
n×p constant observer gain matrix to be designed.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Observer
Th estimated error, e(t) := x(t)− x(t), satisfies:
e(t) = (A−LC)e(t) (41)
If L is designed such that A−LC is stable, then x(t)converges asymptotically towards x(t).
Proposition(40) is an observer for system (2) if and only if the pair(C,A) is observable, i.e.
rank(O) = n
where O =
CCA...
CAn−1
.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Observer design
The observer design is restricted to find L such that A−LCis stable. This is still a pole placement problem.In order to use the acker Matlab function, we will use theduality property between observability and controllability,i.e. :(C,A) observable ⇔ (AT ,CT ) controllable.Then there exists LT such that the eigenvalues ofAT −CT LT can be randomly chosen. As(A−LC)T = AT −CT LT then L exists such that A−LC isstable.Matlab : use L=acker(A’,C’,Po)’ where Pois the set of desired observer poles.Remark : usually the observer poles are chosen around 5to 10 times higher than the closed-loop system, so that thestate estimation is good as early as possible. This is quiteimportant to avoid that the observer makes the closed-loopsystem slower.
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
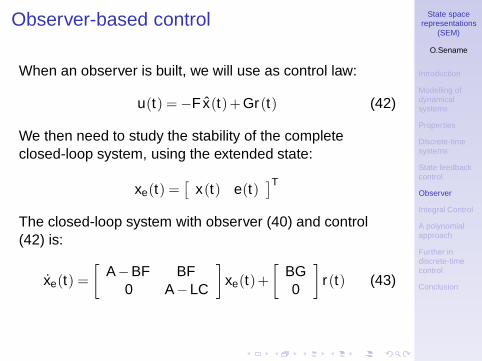
Observer-based control
When an observer is built, we will use as control law:
u(t) = −Fx(t)+Gr(t) (42)
We then need to study the stability of the completeclosed-loop system, using the extended state:
xe(t) =[
x(t) e(t)]T
The closed-loop system with observer (40) and control(42) is:
xe(t) =
[A−BF BF
0 A−LC
]
xe(t)+
[BG0
]
r(t) (43)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Separation principle
The characteristic polynomial of the extended system is:
det(sIn −A+BF )×det(sIn−A+LC)
If the observer and the control are designed separatelythen the closed-loop system with the dynamicmeasurement feedback is stable, given that the control andobserver systems are stable and the eigenvalues of (43)can be obtained directly from them.This corresponds to the so-called separation principle.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Stabilisation/ Detectability
When the linear system (2) is not completely controllableor observable, it is then important to study the stability ofthe non controllable and non observable modes.Use ctrbf and obsvf Matlab commands

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Integral Control
A state feedback controller may not allow to reject theeffects of disturbances (particularly of input disturbances).A very useful method consists in adding an integral term toensure a unitary static closed-loop gain .Considered system:
{x(t) = Ax(t)+Bu(t)+Ed(t), x(0) = x0
y(t) = Cx(t)(44)
where d is the disturbance.The objective is to keep y close to a reference signal r ,even in the presence of d , i.e to keep r −y asymptoticallystable.
State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
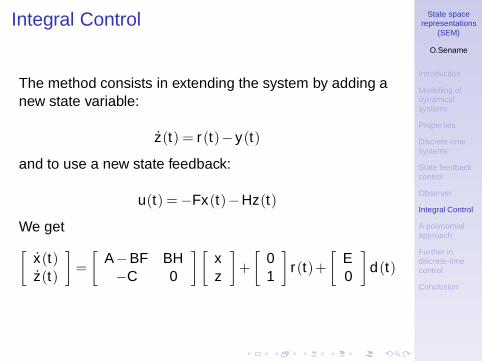
Integral Control
The method consists in extending the system by adding anew state variable:
z(t) = r(t)−y(t)
and to use a new state feedback:
u(t) = −Fx(t)−Hz(t)
We get[
x(t)z(t)
]
=
[A−BF BH−C 0
][xz
]
+
[01
]
r(t)+
[E0
]
d(t)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Integral control scheme
The complete structure has the following form:
When an observer is to be used, the control action simplybecomes:
u(t) = −Fx(t)−Hz(t)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Equivalence RST controller andobserver-based
The use of an observer-based controller is equivalent tothe following controller :
u(s) = −F (sIn −A+BF +LC)−1Ly(s)
+[In −F (sIn −A+BF +LC)−1B]Gr(s)
which corresponds to a two-degrees of freedom controller
u(s) = −R(s)
S(s)y(s)+
T (s)
S(s)r(s)
and this can be implemented in an RST form.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
About sampling period and time response
Influence of the sampling period on the time response
Impose a maximal time response to a discrete system isequivalent to place the poles inside a circle defined by theupper bound of the bound given by this time response.The more the poles are close to zero, the more the systemis fast.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Frequency analysisAs in the continuous time, the Bode diagram can also beused.Example with sampling TimeTe = 1s ⇔ fe = 1Hz ⇔ we = 2π):
Note that, in our case, the Bode is cut at the pulse w = π.see SYSD = c2d(SYSC,Ts,METHOD) in MATLAB.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Frequency analysisAs in the continuous time, the Bode diagram can also beused.Example with sampling TimeTe = 1s ⇔ fe = 1Hz ⇔ we = 2π):
Note that, in our case, the Bode is cut at the pulse w = π.see SYSD = c2d(SYSC,Ts,METHOD) in MATLAB.
Sampling ↔ LimitationsRecall the Shannon theorem that impose the samplingfrequency at least 2 times higher that the systemmaximum frequency. Related to the anti-aliasing filter. . .

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
About sampling period and robustness
Influence of the sampling period on the polesIn theory, smaller the sampling period Te is, closer thediscrete system is from the continuous one.
But reducing the sampling time modify poleslocation. . . Poles and zeros become closer to the limit ofthe unit circle ⇒ can introduce instability (decreaserobustness).⇒ Sampling influences stability and robustness⇒ Over sampling increase noise sensitivity

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Zeros
Influence of the sampling period on the polesA discrete system with one or few zeros at the origin isfaster than one with no origin zeros. In the time domain azero at the origin induces a sample advance.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Stability
RecallA linear continuous feedback control system is stable if allpoles of the closed-loop transfer function T (s) lie in the lefthalf s-plane.The Z-plane is related to the S-plane byz = e−sTe = e(σ+jω)Te. Hence
|z| = eσTe and ∠z = ωTe

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Stability (cont’d)
Jury criteriaThe denominator polynomial(den(z) = a0zn +a1zn−1 + · · ·+an = 0) has all its rootsinside the unit circle if all the first coefficients of the oddrow are positive.
1 a0 a1 a2 . . . an−k . . . an
2 an an−1 an−2 . . . ak . . . a0
3 b0 b1 b2 . . . bn−1
2 bn−1 bn−2 bn−3 . . . b0...
...2n +1 s0
b0 = a0 −anan
a0
b1 = a1 −an−1an
a0
bk = ak −an−kan
a0
ck = bk −bn−1−kbn−1
b0

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Example
StabilityFind the stability region of D(z) = z2 +a1z +a2

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Example
StabilityFind the stability region of D(z) = z2 +a1z +a2
Solution
1 1 > 0 a1 a2
2 a2 a1 13 1−a2
2 > 0? a1 −a1a2
4 a1 −a1a2 1−a22
5 (1−a22)
2−(a21(1−a2)
2)
1−a22
> 0?
hence,
1−a22 > 0
(1+a2)2 > a2
1

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
How to get a discrete controller
First way
◮ Obtain a discrete-time plant model (by discretization)◮ Design a discrete-time controller◮ Derive the difference equation
Second way
◮ Design a continuous-time controller◮ Converse the continuous-time controller to discrete
time (c2d)◮ Derive the difference equation
Now the question is how to implement the computedcontroller on a real-time (embedded) system, and what arethe precautions to take before?

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Implementationcharacteristics

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Anti-aliasing & Sampling
Anti-aliasingPractically it is smart to use a constant high samplingfrequency with an analog filter matching this frequency.Then, after the A/D converter, the signal is down-sampledto the frequency used by the controller. Remember thatthe pre-filter introduce phase shift.
Sampling frequency choiceThe sampling time for discrete-time control are based onthe desired speed of the closed loop system. A rule ofthumb is that one should sample 4−10 times per rise timeTr of the closed loop system.
Nsample =Tr
Te≈ 4−10
where Te is the sampling period, and Nsample the numberof samples.

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Delay
ProblematicSampled theory assume presence of clock thatsynchronizes all measurements and control signal. Hencein a computer based control there always is delays (controldelay, computational delay, I/O latency).
OriginsThere are several reasons for delay apparition
◮ Execution time (code)◮ Preemption from higher order process◮ Interrupt◮ Communication delay◮ Data dependencies
Hence the control delay is not constant. The delayintroduce a phase shift ⇒ Instability!

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Delay (cont’d)
Admissible delay (Bode)
◮ Measure the phase margin: PM = 180+ϕw0 [r], whereϕw0 is the phase at the crossover frequency w0, i.e.|G(jw0)| = 1
◮ Then the delay margin is
DM =PMπ
180w0[s]
Exercise: compute delay margin for these 3 cases

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Delay (cont’d)
Static scheduling vs Minimal control delay

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Delay (cont’d)
How to compensate the delay?There are several ways
◮ Minimize the delay (case B - Minimal control delay)◮ Compensate it off-line◮ Make the controller robust (case A - static scheduling)◮ Compensate on-line
Exple: Code that minimize the delay
LOOP %%% At each clock interruptADinCalculateOutputDAoutUpdateStatesIncTime %%% Evaluate remaining timeWaitUntilTe
END

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Delay (cont’d)
ExerciseConsider the following controller,
x(k +1) = Fx(k)+Gy(k)
u(k) = Cx(k)+Dy(k)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Delay (cont’d)
ExerciseConsider the following controller,
x(k +1) = Fx(k)+Gy(k)
u(k) = Cx(k)+Dy(k)
LOOPADin(y);%%% CalculateOutputu := u1 + D*y;DAout(u)%%% UpdateStatesx := F*x + G*y;u1 := C*x;%%% Wait for the nextIncTime;
Note that such a structure is notthe only one! Controller can workon interrupts (exple: Brushlessmotor)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Quantification
Effects
◮ Non linear phenomena◮ Limit cycles
Example (stable for K<2)
H(z) =0.25
(z −1)(z −0.5)

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Quantification (cont’d)
Results

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Quantification (cont’d)
Results

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Discretisation
The idea behind discretisation of a controller is to translateit from continuous-time to discrete-time, i.e.
A/D + algorithm +D/A ≈ G(s)
To obtain this, few methods exists that approach theLaplace operator (see lecture 1-2).
Recall
s =z −1
Te
s =z −1zTe
s =2Te
z −1z +1

State spacerepresentations
(SEM)
O.Sename
Introduction
Modelling ofdynamicalsystems
Properties
Discrete-timesystems
State feedbackcontrol
Observer
Integral Control
A polynomialapproach
Further indiscrete-timecontrol
Conclusion
Conclusion
◮ A state space approach to pole placement control◮ A similar design can be done using a polynomial
approach◮ Continuous but directly extended to discrete-time
systems.
Related Documents











