Report Title: Deliverable 4.6: Summarise current operational practice and limitations No part of this document may be reproduced or transmitted in any form or by any means, nor stored in any information retrieval system of any kind, nor communicated to any other person without the specific written permission of the AZIPILOT Project Steering Committee. AZIPILOT Intuitive operation and pilot training when using marine azimuthing control devices

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Report Title: Deliverable 4.6:
Summarise current operational practice and limitations
No part of this document may be reproduced or
transmitted in any form or by any means, nor
stored in any information retrieval system of any
kind, nor communicated to any other person
without the specific written permission of the
AZIPILOT Project Steering Committee.
AZIPILOTIntuitive operation
and pilot training
when using marine
azimuthing
control devices
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 2
Contents
1. Publishable Executive Summary 3
2. Types and configurations of vessels fitted with Azimuthing
propellers (ACD’s). 4
2.1. Single ACD: 4
2.2.Single ACD in conjunction with fixed propeller: 4
2.3.Twin ACD’s: 5
2.4.Triple ACD’s: 6
2.5.Four or more ACD’s: 6
3. Standard Manoeuvres. 8
3.1.Reducing Speed of the vessel. 8
3.2.Moving sideways. 9
4. Emergency manoeuvres. 11
4.1.Crash stop. 11
4.2.Emergency turn. 13
5. ASD tug fitted with twin Aquamasters and Azipilot control. 14
6. CONCLUSION 18
7. APPENDIX 1. 19
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 3
1. Publishable Executive Summary
WP 4 Operational Practice is aimed at collating, reviewing and auditing available material
that is relative to the operation of azimuthing control devices when manoeuvring ships in
Pilotage waters.
Task 4.6 summarises operational best practice while highlighting the limitation for pilots and
ships officers when operating ships equipped with azimuthing control devices. The use of
azimuthing control devices provides the ship handler with an infinite number of solutions
which itself introduces potential problems that may be detrimental to both the success of the
intended manoeuvre to the preservation and protection of the azimuthing device itself and to
the Port infrastructure. This report identifies the most suitable ship handling procedures to
validate operational best practice and identifies the limitations of each manoeuvre.
The task culminates in this report and constitutes one deliverable at M27 of the project.
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 4
2. Types and configurations of vessels fitted with Azimuthing
propellers (ACD’s).
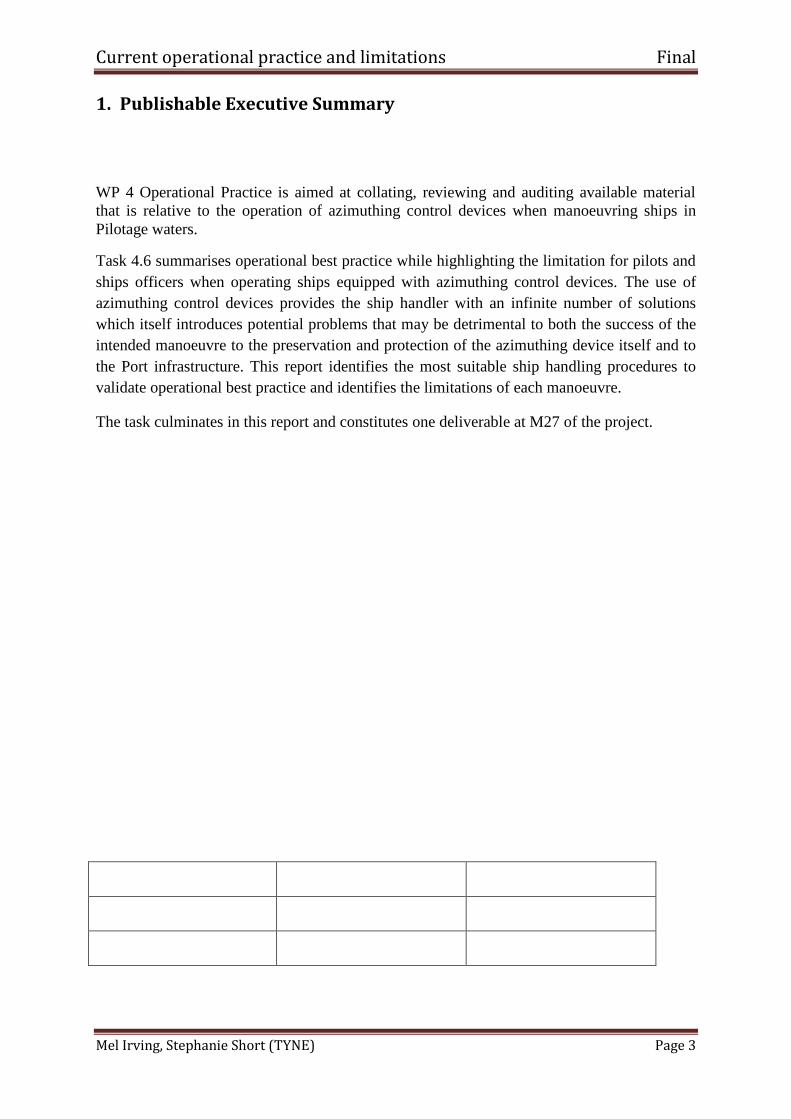
2.1. Single ACD: Can be found on a variety of vessels from small tugs to cargo ships and large tankers.
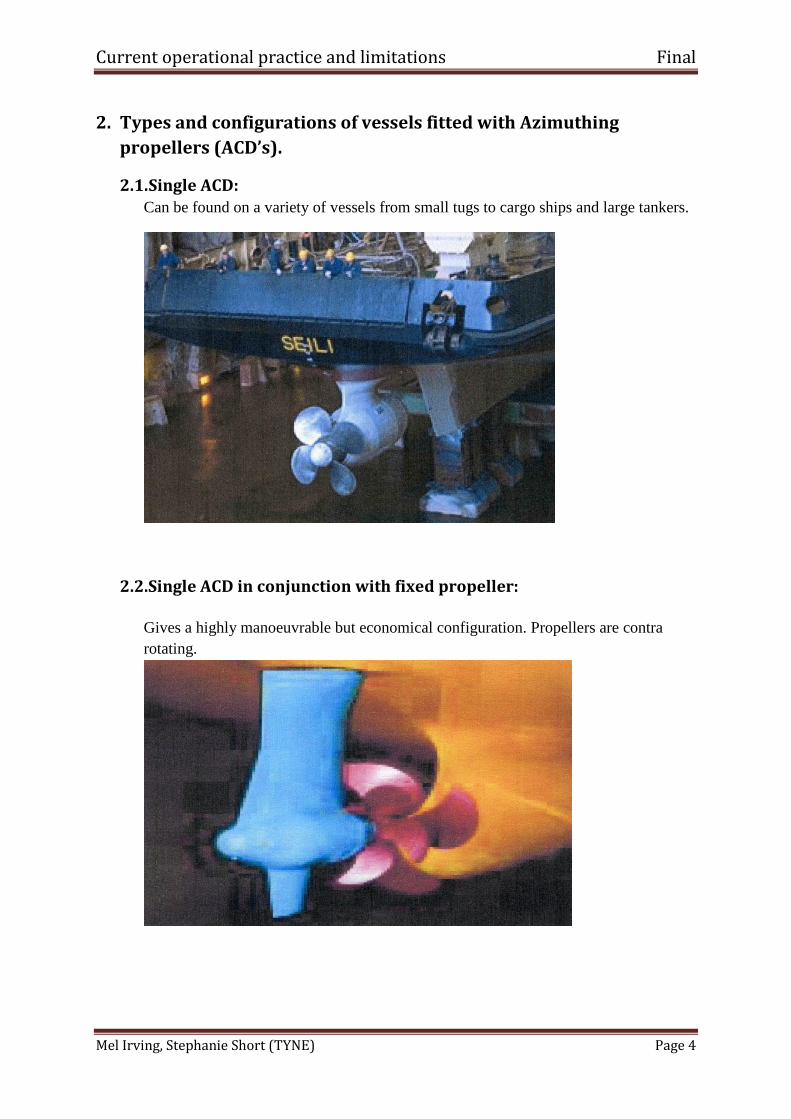
2.2.Single ACD in conjunction with fixed propeller:
Gives a highly manoeuvrable but economical configuration. Propellers are contra
rotating.

Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 5
2.3.Twin ACD’s:
The most common configuration of Azimuthing propellers, found everywhere from
tugs and harbour craft through to large Cruise Ships and Tankers. The units may be
fitted at the bow or stern, or even, as in the case of many Ferries one at either end of
the vessel.
Aft ACD on the Isle of Bute, note contra rotating propellers, similar unit forward.

Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 6
2.4.Triple ACD’s: A popular configuration for the latest generation of tugs, (Rotor Tugs).
2.5.Four or more ACD’s: Usually found on barge type vessels, often linked to Dynamic Positioning systems.
The above listed configurations are further diversified by the type of propeller and
power units. The propellers may be fixed or controllable pitch, reversible or non-
reversible. They may also be open or shrouded. The power units may be within the
pods or external, as in the case of mechanical Z-drives. The type of control system
used is also variable, although generally it will consist of either a single joystick, with
computers controlling the azimuthing of the units, or a single Aquamaster type
controller for each of the units, giving full manual control. The single joystick
operation may also be linked to the vessel’s thrusters giving full control of the ship
with just one lever.
Given the diversity of vessel configurations, it would be impractical to give a set of
rules on how to handle an Azipod vessel, which would apply to each and every one.
In all cases the peculiarities of the individual installation needs to be considered.
Factors that have to be considered would include the following:
1. Position of the ACD’s.
2. Interaction between units.
3. Interaction with vessel’s hull.
4. Manufacturer restrictions on rpm’s used.
5. Restrictions on the use of reverse pitch.
6. Availability of thrusters.
7. Control system restrictions, e.g. Sea or Harbour mode.

Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 7
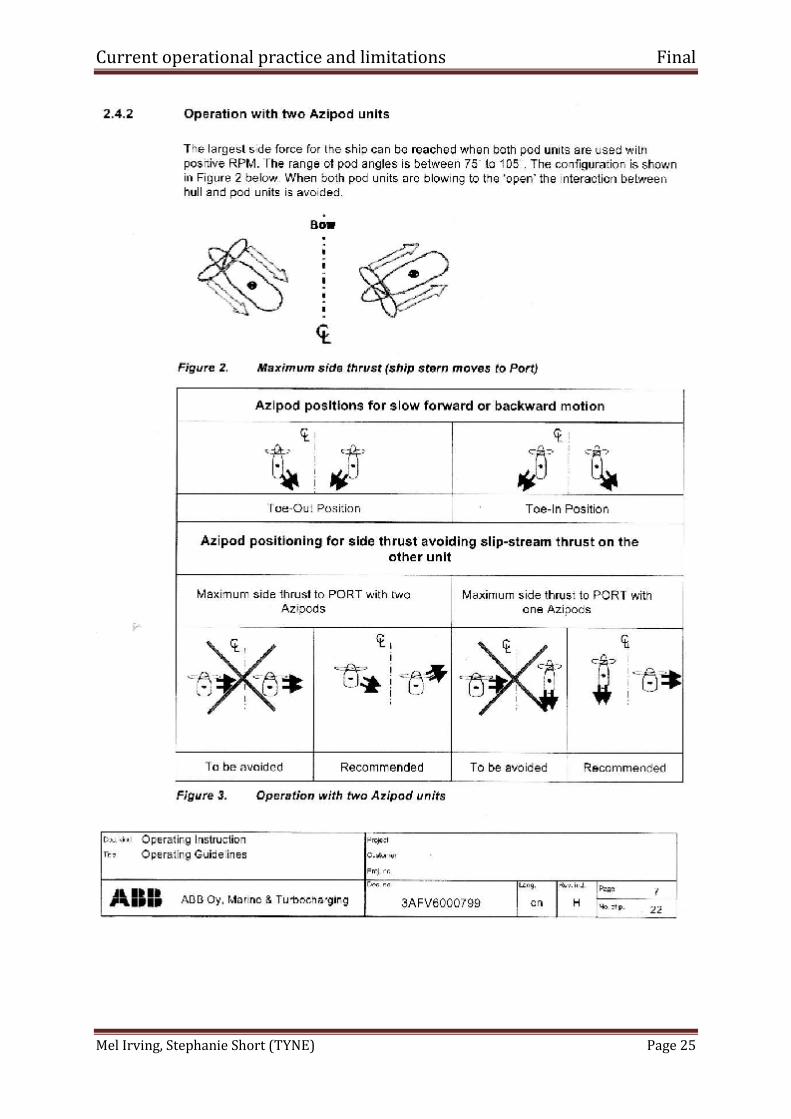
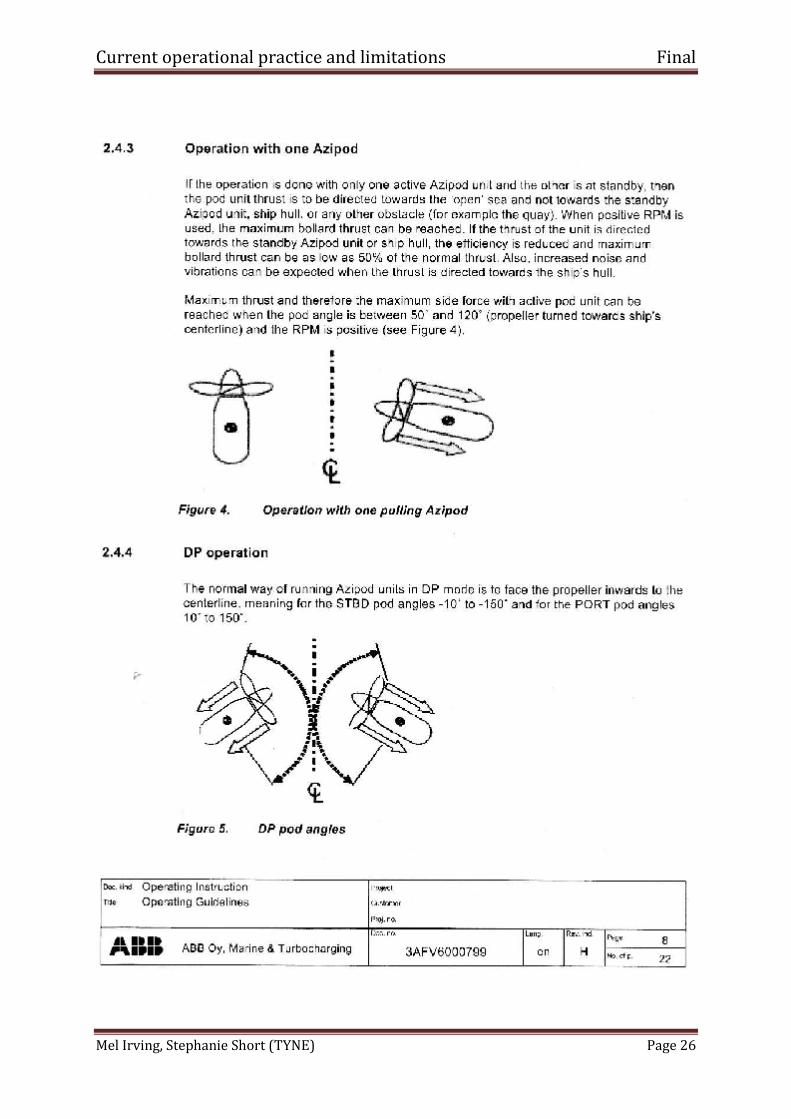
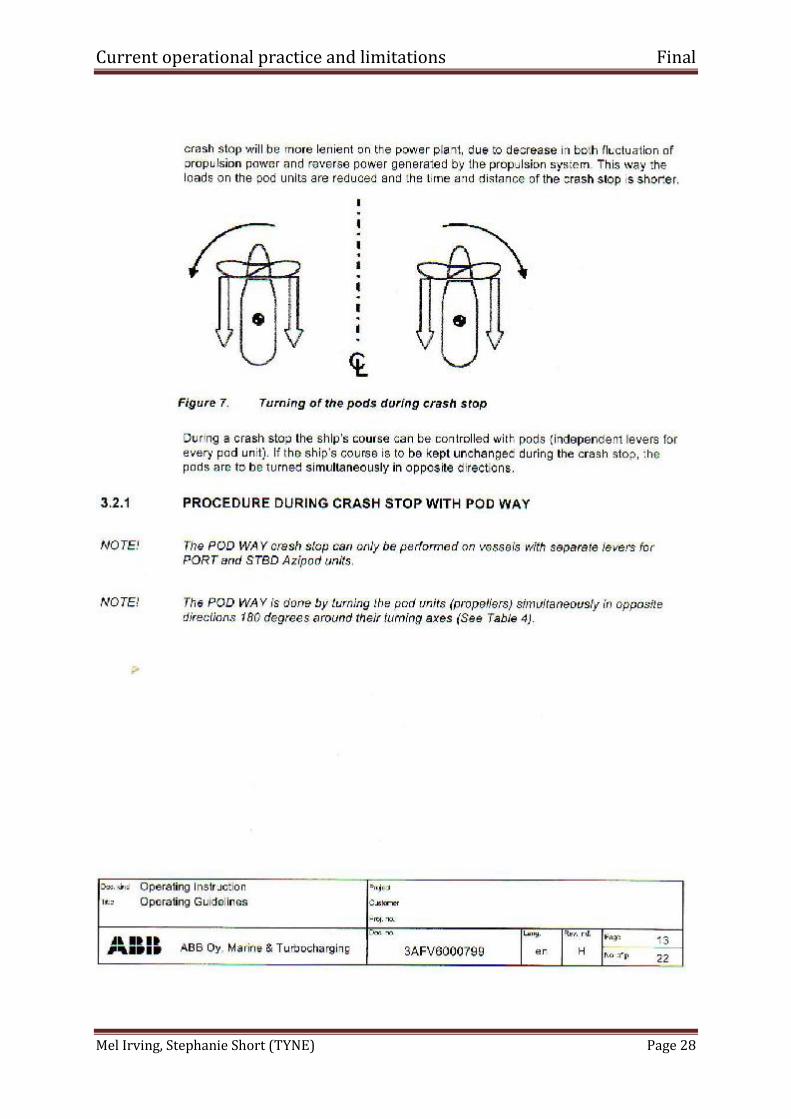
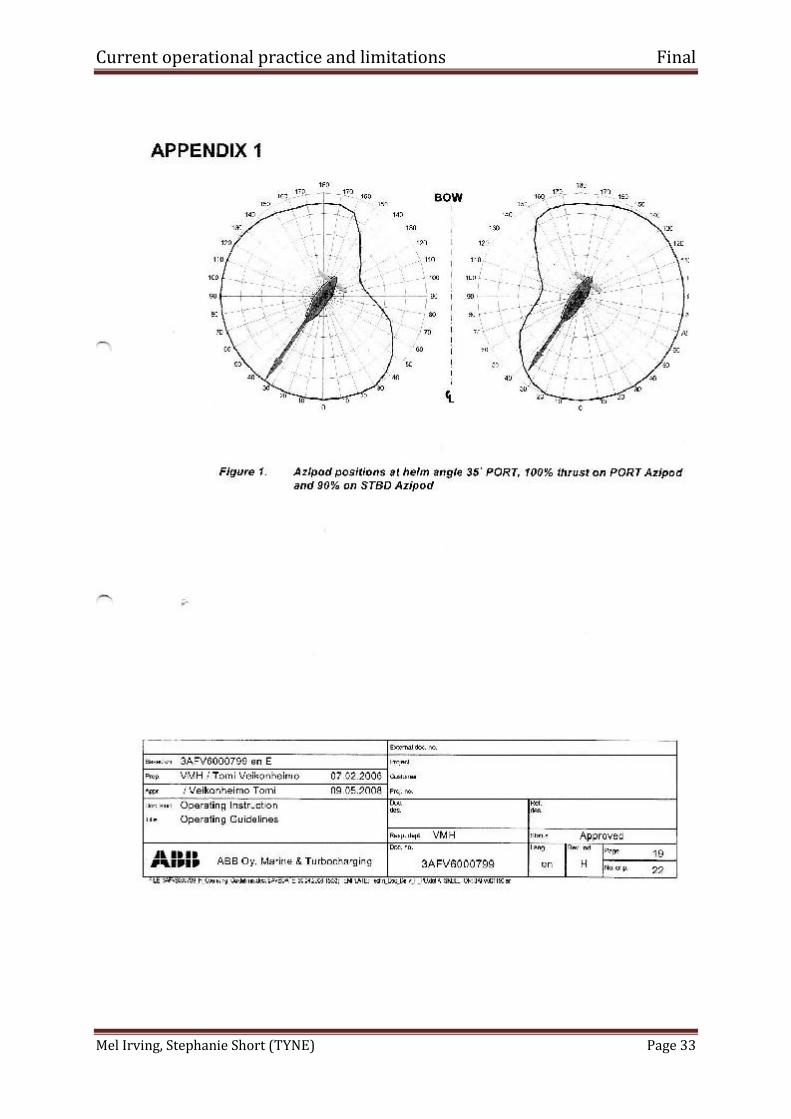
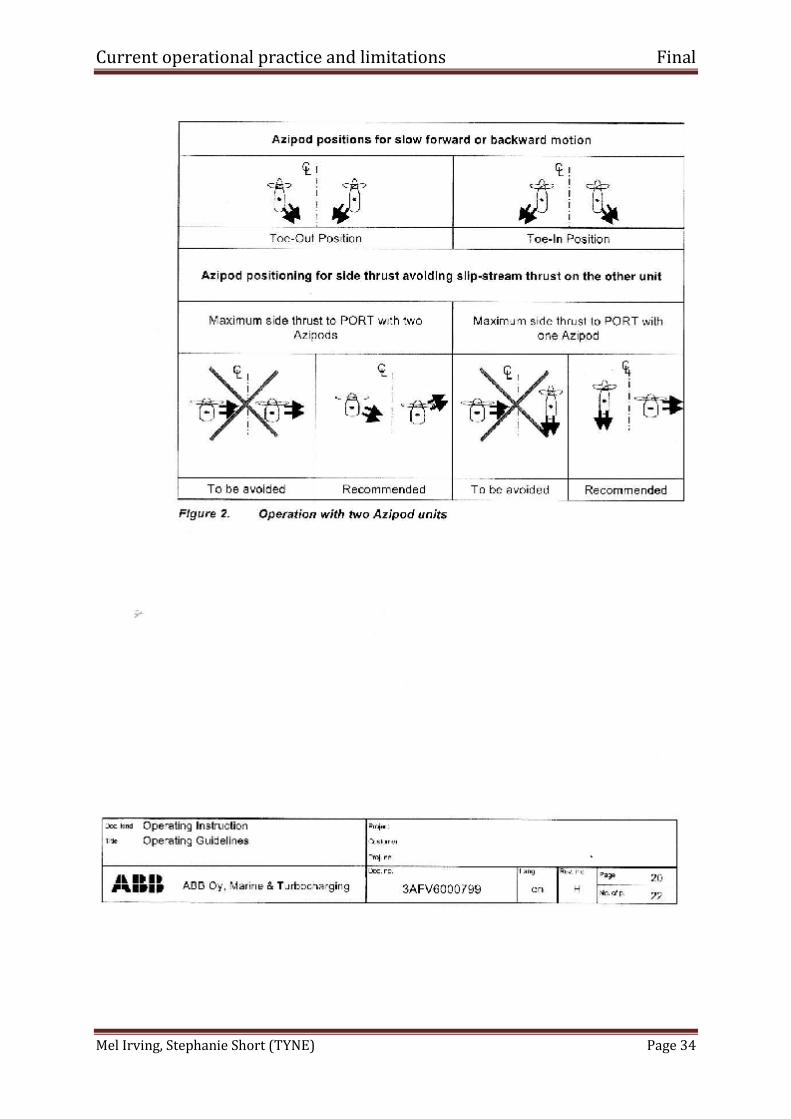
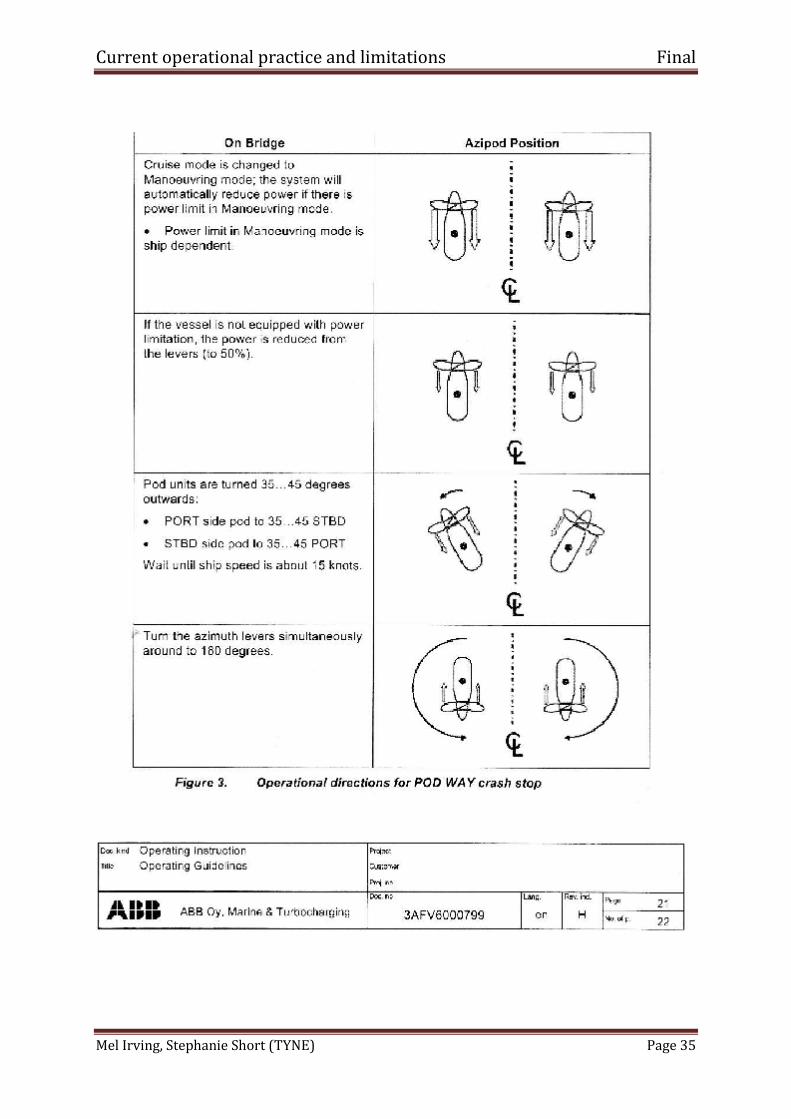
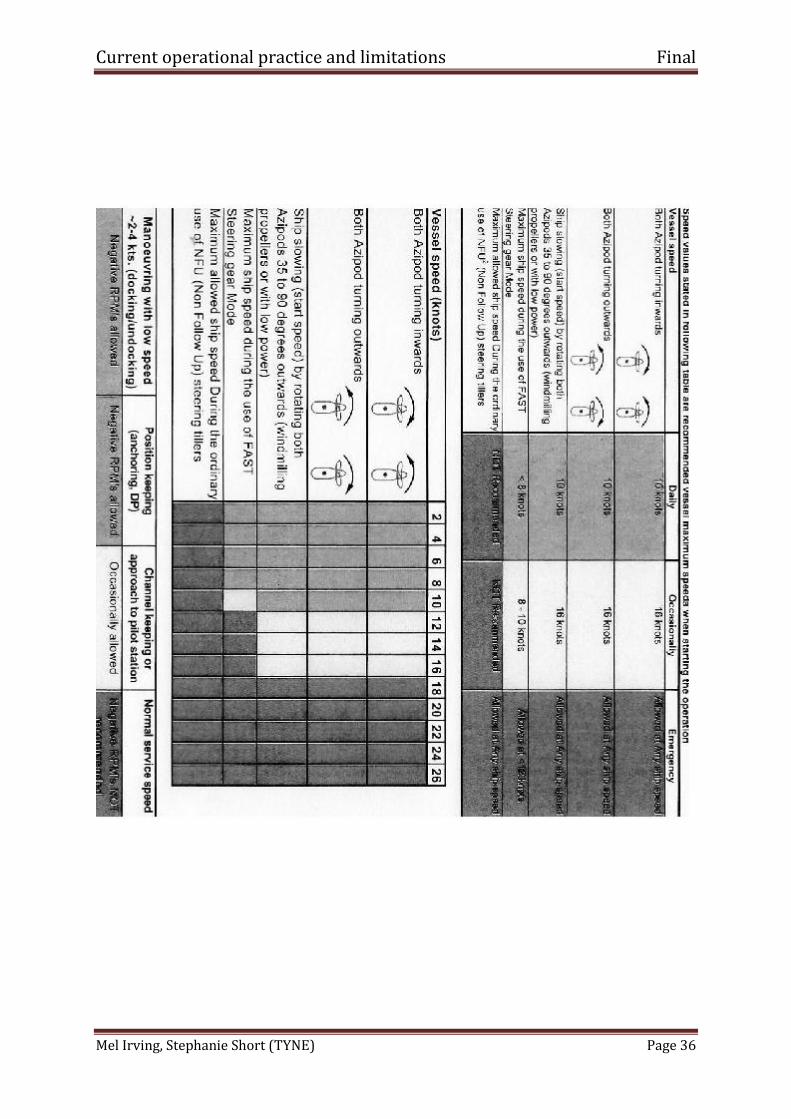
It is important to consult manufacturer’s recommendations (Appendix1), any guidelines
issued by the ship owner/operator and also the manoeuvring data obtained from the vessel’s
sea trials. The environmental conditions will also have a bearing on how the manoeuvring is
performed. There are documented problems with Azipod bearings when fitted to large Cruise
Liners. Such problems lead to recommendations as to how best to operate the units with
longevity in mind. Thought also has to be given to the gyroscopic inertia generated if units
are quickly rotated at full power.
ACD units can either push the vessel through the water or pull the vessel through the water
but which ever unit is chosen consideration needs to be given to the benefits of always using
positive thrust as opposed to the problems of using negative thrust. It is recognised that there
is loss of power if reversing the thrust, this can be as much as 60%. It is better to rotate the
pod than put the unit into reverse as such an action now has the thin trailing edge of the blade
becoming the leading edge, a job it is not designed to do so not only do you increase the risk
of damage to the blade but the shape of the blade is no longer the optimum one for the job it
is designed to do and there will probably also be noise and vibration caused by cavitating
propellers. In addition moving from positive rpm to negative rpm you pass through zero and
loose the oil film that helps lubricate the bearings. It ought to be acknowledged though that
the ship handler may find him/herself in a manoeuvre that may warrant operating negative
rpm in a time critical situation
During Project interviews with ships Masters, used to operating ACD units, it became
apparent that it is necessary to be aware of certain situations that can lead to a loss of the oil
film on the bearings or cause vibration that can increase bearing stress during manoeuvring
both of which may result in premature bearing failure. These include for example ensuring a
steady increase/decrease of ships speed thereby avoiding large differences between rpm and
ships speed., avoid cycling between zero and 25 rpm and where possible try and maintain a
minimum of 25rpm at all times, avoid directing wash from one unit directly onto another and
avoid water flow from one unit entering the propeller of the other unit and the adverse effects
when interaction between the ships hull and the ACD occurs.
Having taken all the above factors into consideration including the test results obtained
through Task 4.5 – Encapsualting Knowledge using Integration and Evaluation Exercises -
then best practice for the particular vessel can be formulated.
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 8
3. Standard Manoeuvres.
3.1. Reducing Speed of the vessel.
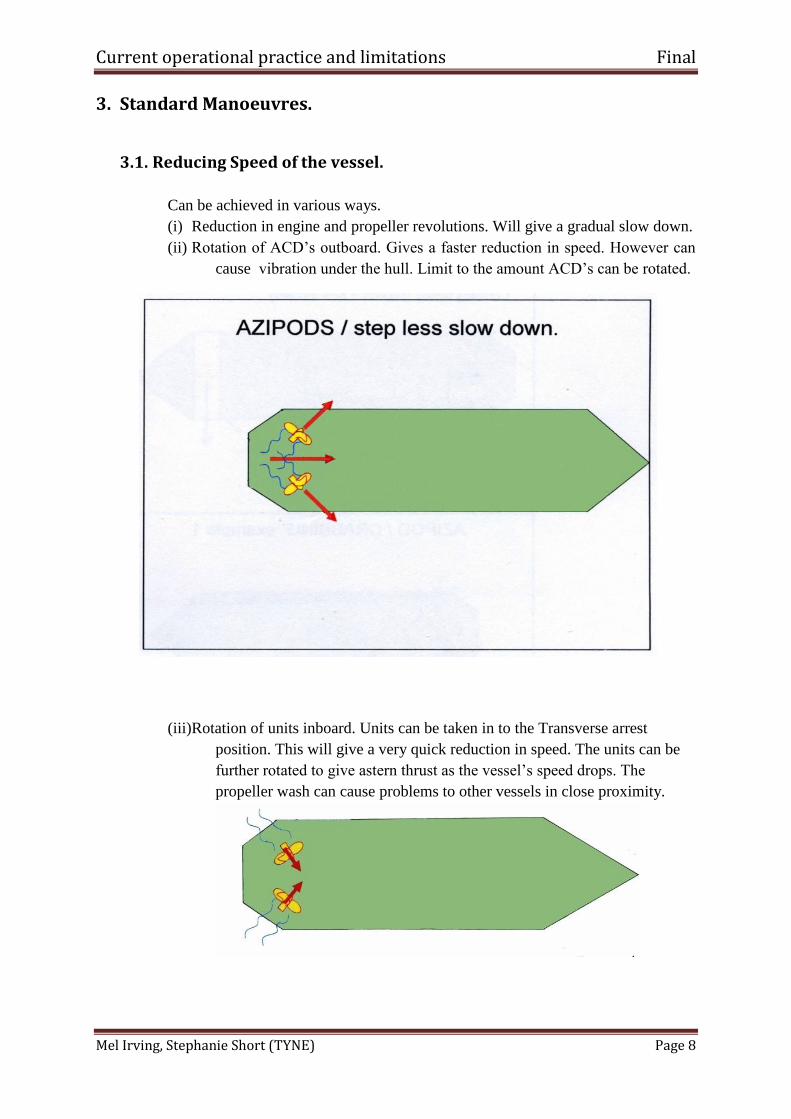
Can be achieved in various ways.
(i) Reduction in engine and propeller revolutions. Will give a gradual slow down.
(ii) Rotation of ACD’s outboard. Gives a faster reduction in speed. However can
cause vibration under the hull. Limit to the amount ACD’s can be rotated.
(iii)Rotation of units inboard. Units can be taken in to the Transverse arrest
position. This will give a very quick reduction in speed. The units can be
further rotated to give astern thrust as the vessel’s speed drops. The
propeller wash can cause problems to other vessels in close proximity.
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 9
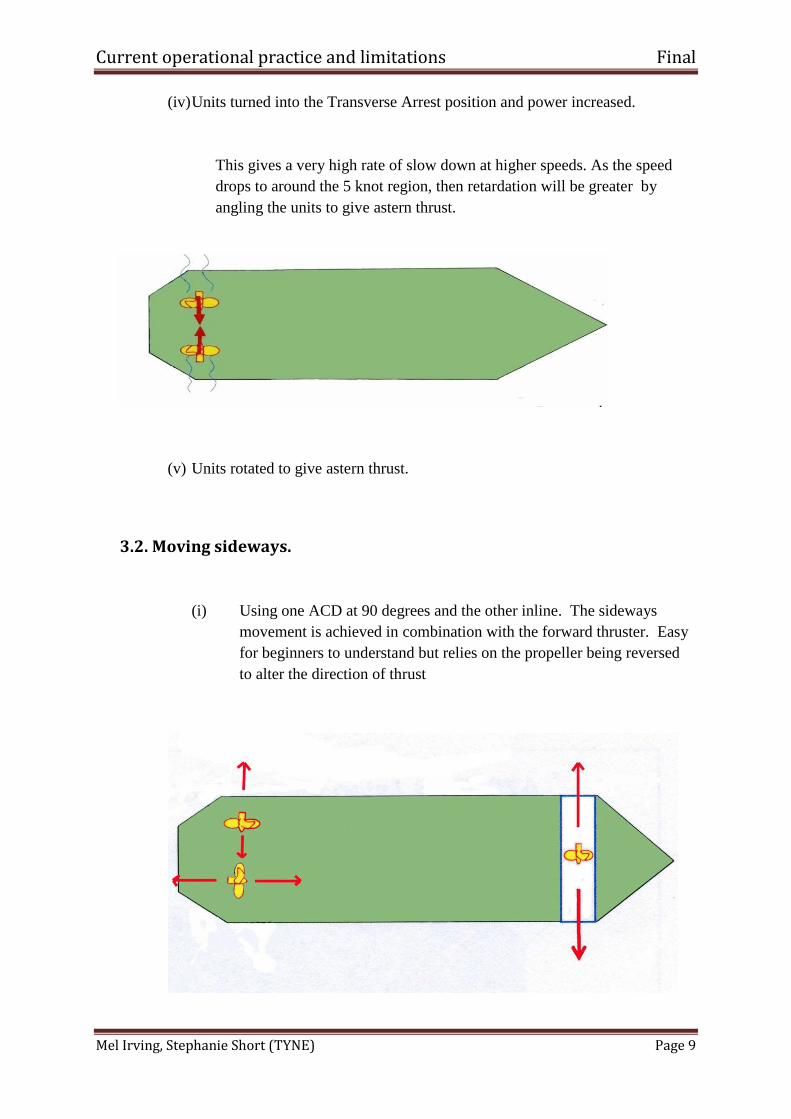
(iv) Units turned into the Transverse Arrest position and power increased.
This gives a very high rate of slow down at higher speeds. As the speed
drops to around the 5 knot region, then retardation will be greater by
angling the units to give astern thrust.
(v) Units rotated to give astern thrust.
3.2. Moving sideways.
(i) Using one ACD at 90 degrees and the other inline. The sideways
movement is achieved in combination with the forward thruster. Easy
for beginners to understand but relies on the propeller being reversed
to alter the direction of thrust
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 10
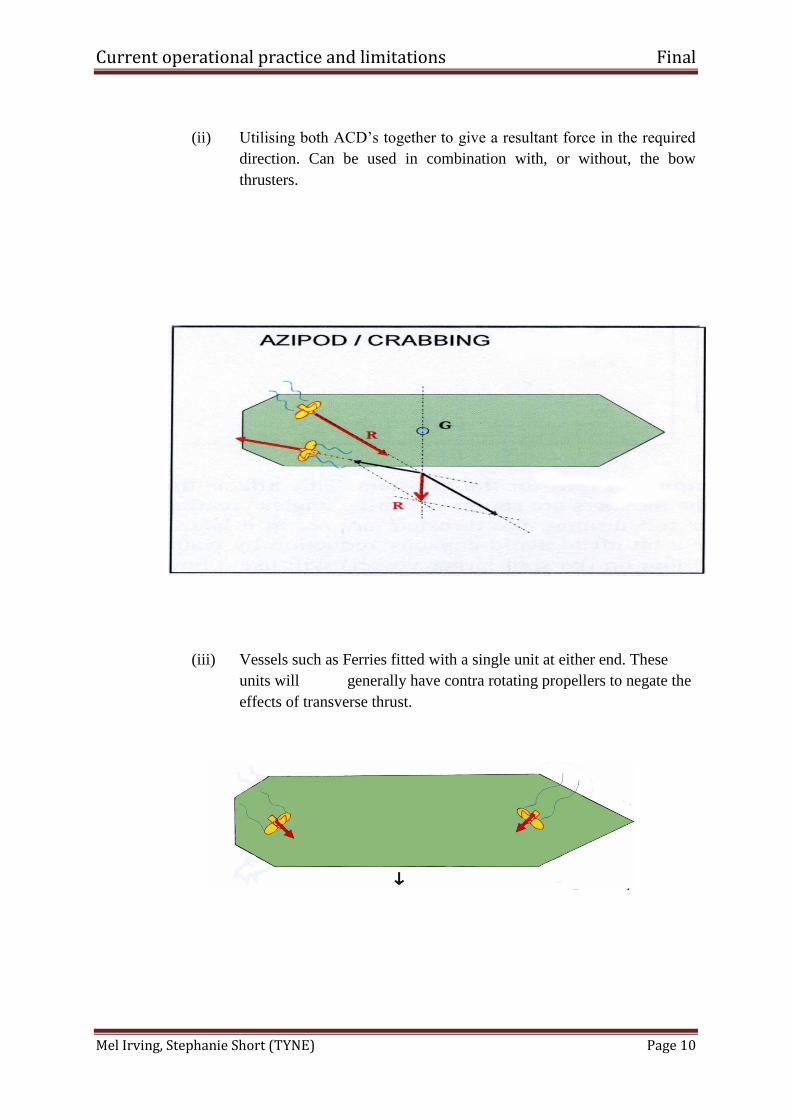
(ii) Utilising both ACD’s together to give a resultant force in the required
direction. Can be used in combination with, or without, the bow
thrusters.
(iii) Vessels such as Ferries fitted with a single unit at either end. These
units will generally have contra rotating propellers to negate the
effects of transverse thrust.
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 11
4. Emergency manoeuvres.
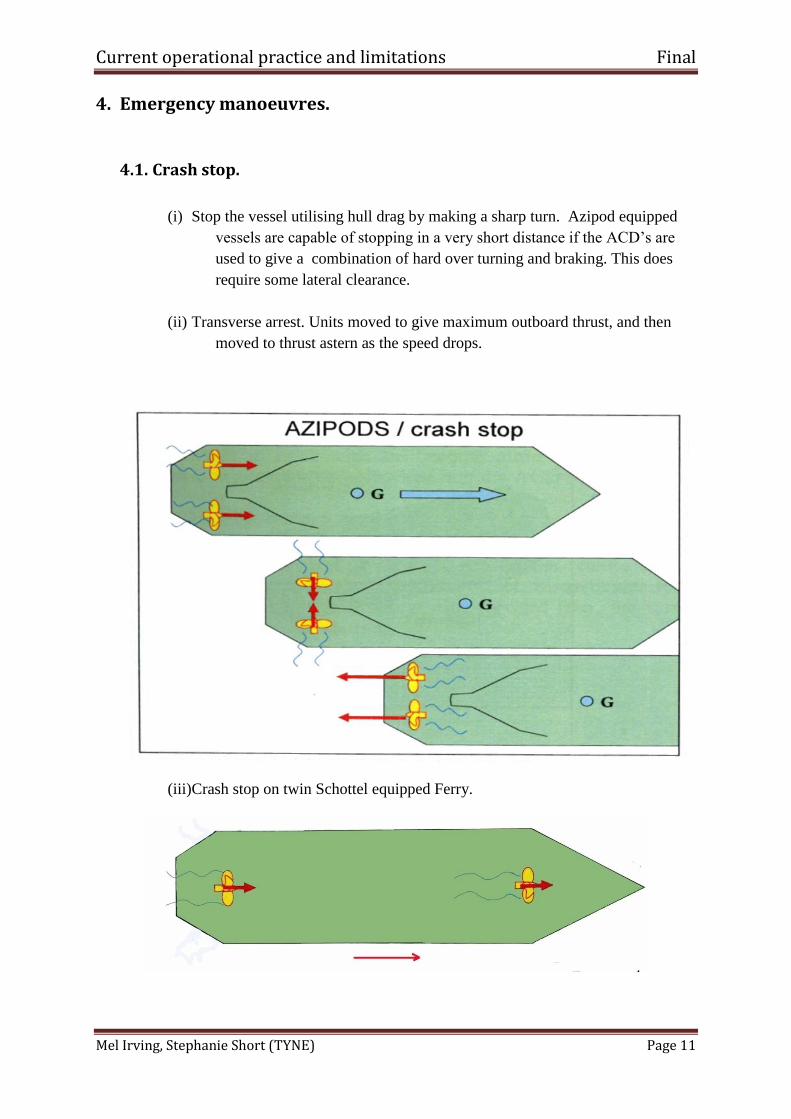
4.1. Crash stop.
(i) Stop the vessel utilising hull drag by making a sharp turn. Azipod equipped
vessels are capable of stopping in a very short distance if the ACD’s are
used to give a combination of hard over turning and braking. This does
require some lateral clearance.
(ii) Transverse arrest. Units moved to give maximum outboard thrust, and then
moved to thrust astern as the speed drops.
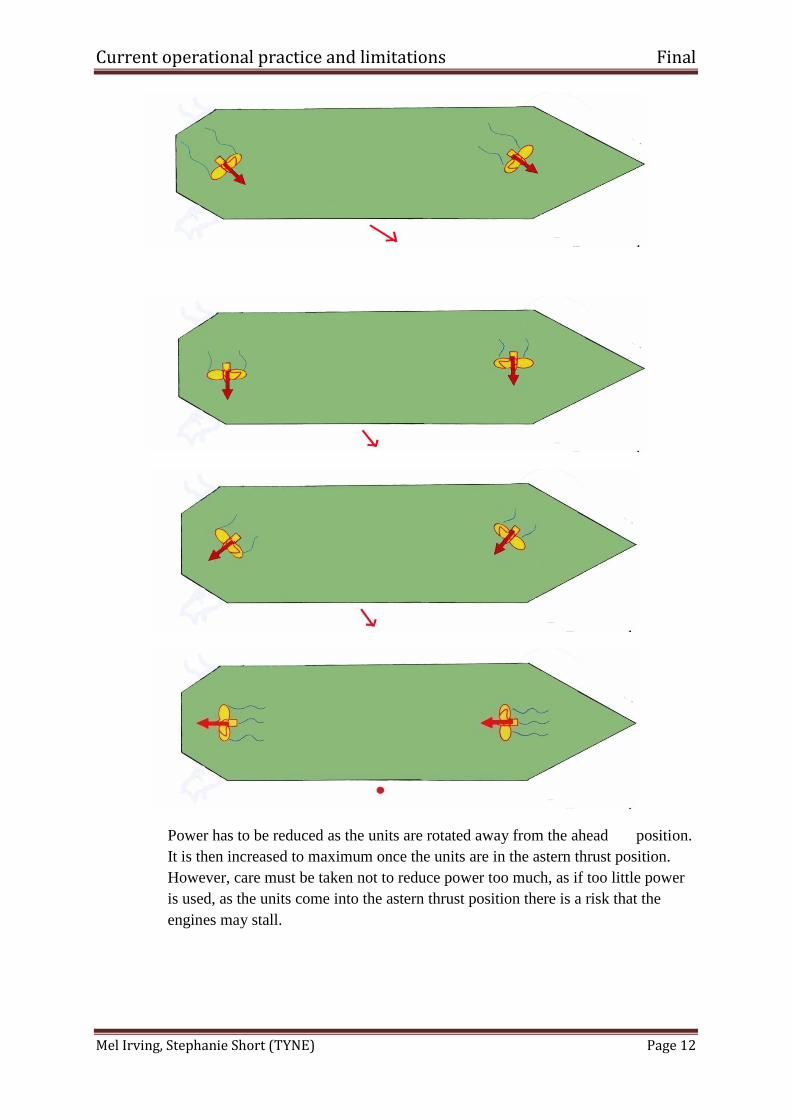
(iii)Crash stop on twin Schottel equipped Ferry.
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 12
Power has to be reduced as the units are rotated away from the ahead position.
It is then increased to maximum once the units are in the astern thrust position.
However, care must be taken not to reduce power too much, as if too little power
is used, as the units come into the astern thrust position there is a risk that the
engines may stall.
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 13
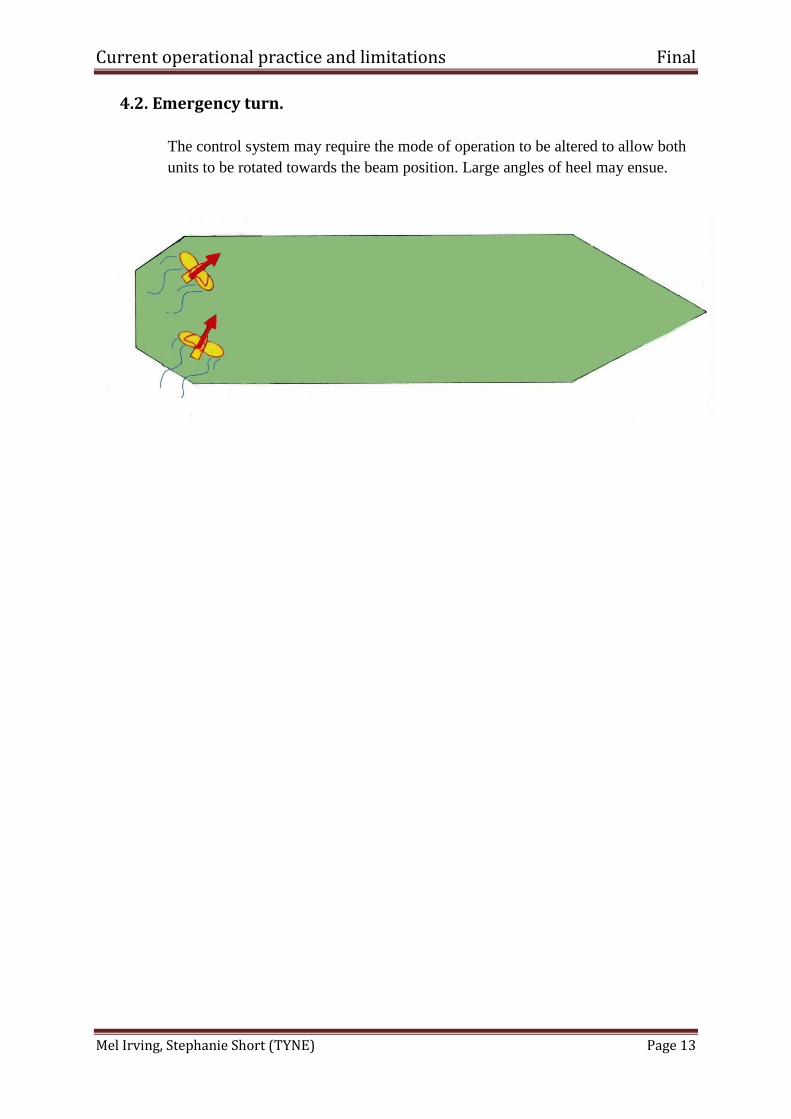
4.2. Emergency turn.
The control system may require the mode of operation to be altered to allow both
units to be rotated towards the beam position. Large angles of heel may ensue.
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 14
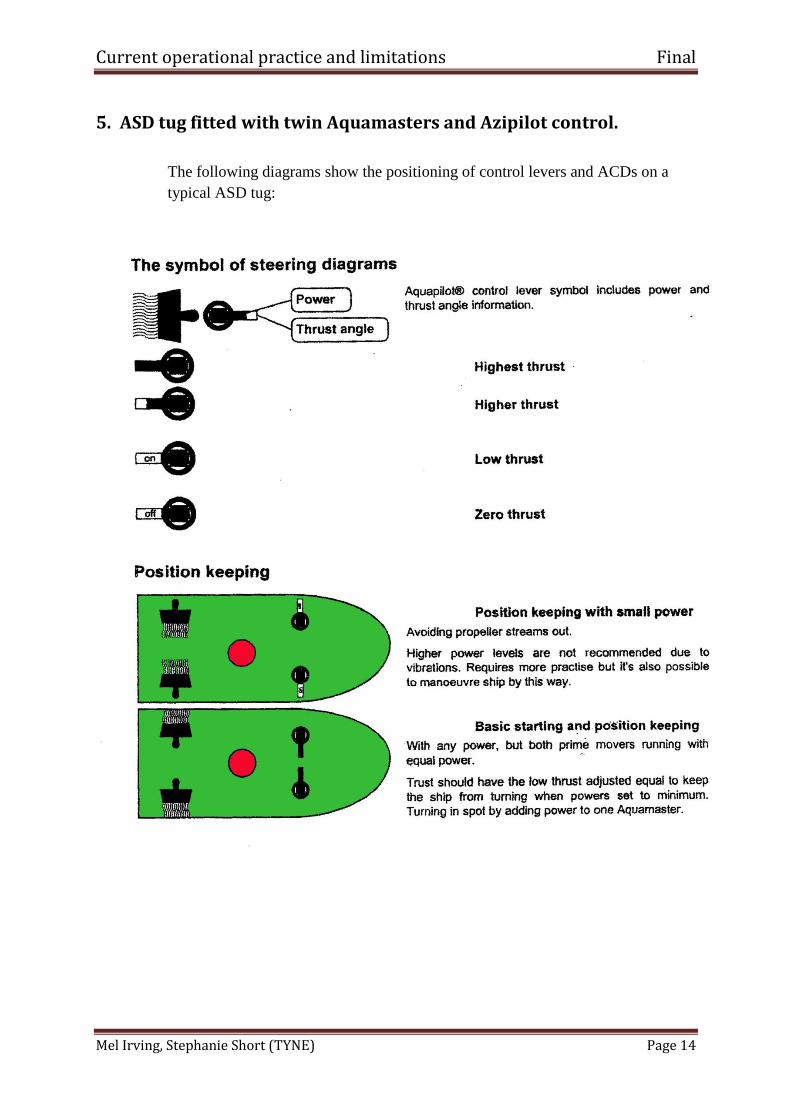
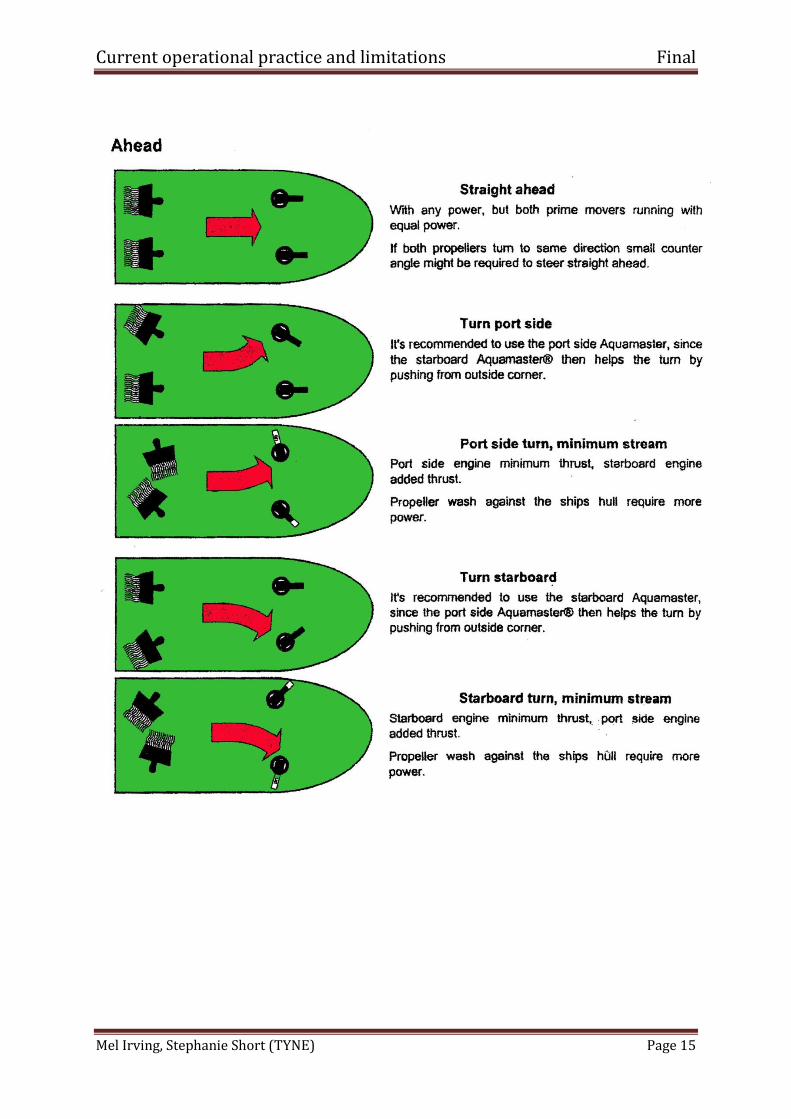
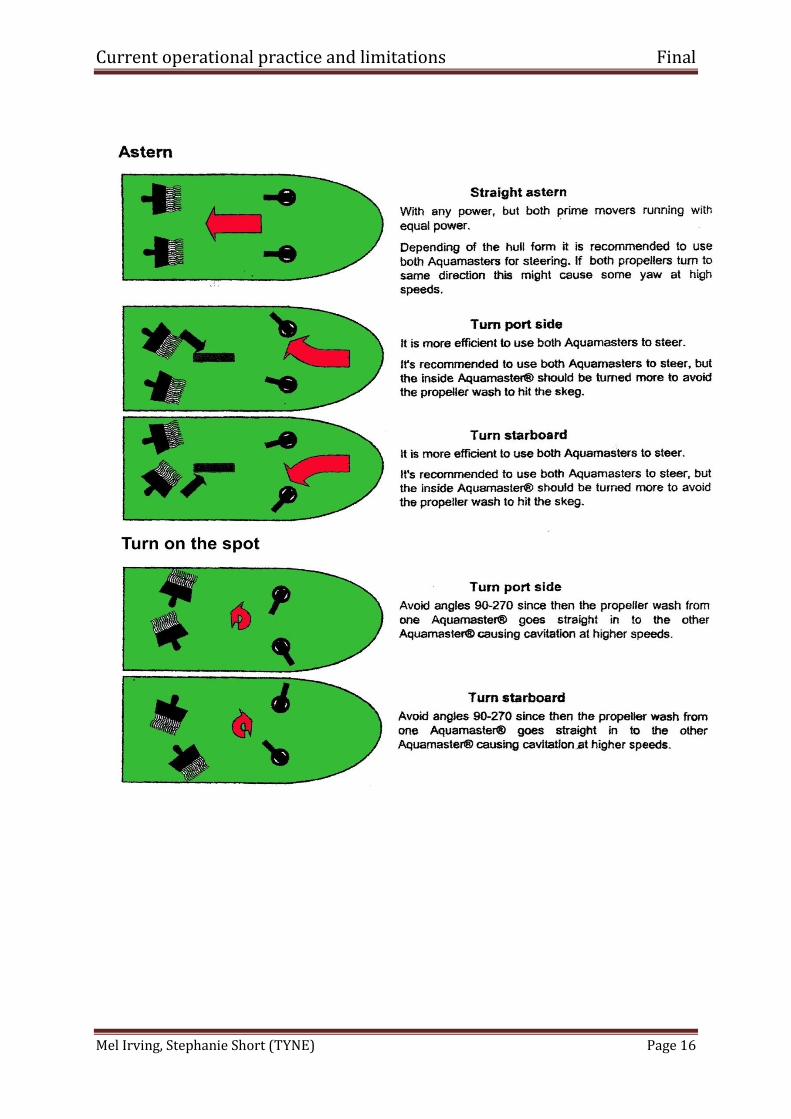
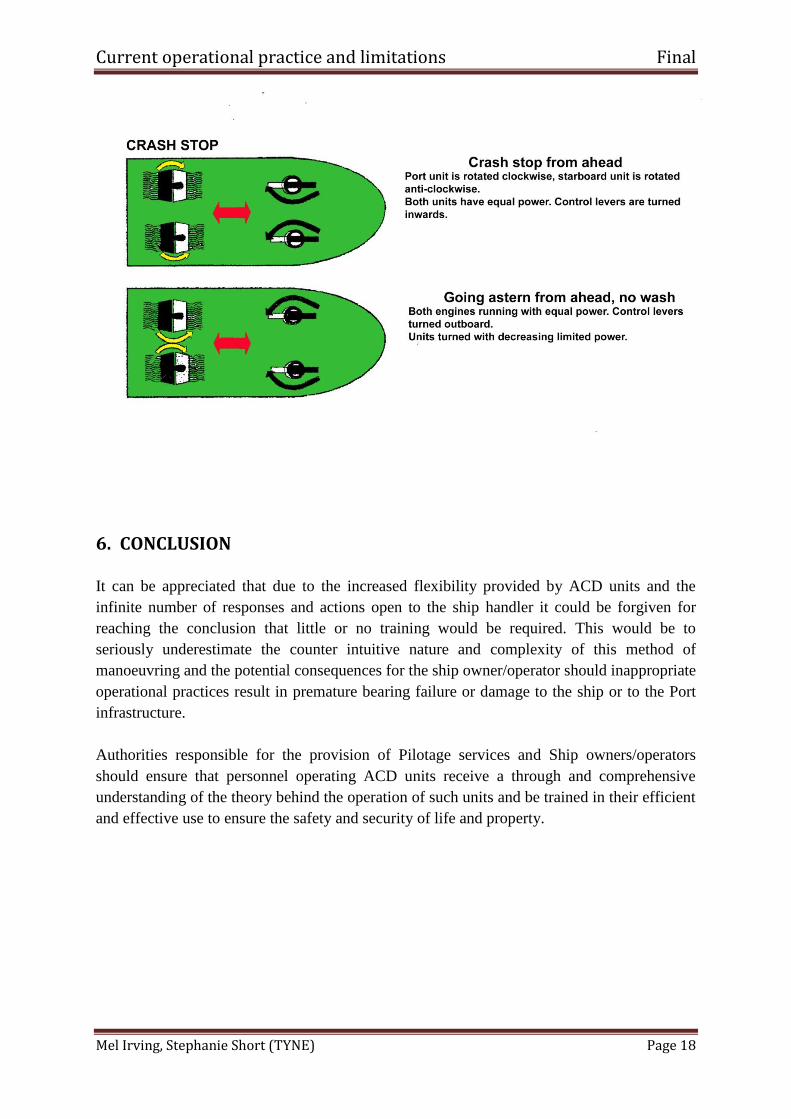
5. ASD tug fitted with twin Aquamasters and Azipilot control.
The following diagrams show the positioning of control levers and ACDs on a
typical ASD tug:
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 15
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 16

Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 17
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 18
6. CONCLUSION
It can be appreciated that due to the increased flexibility provided by ACD units and the
infinite number of responses and actions open to the ship handler it could be forgiven for
reaching the conclusion that little or no training would be required. This would be to
seriously underestimate the counter intuitive nature and complexity of this method of
manoeuvring and the potential consequences for the ship owner/operator should inappropriate
operational practices result in premature bearing failure or damage to the ship or to the Port
infrastructure.
Authorities responsible for the provision of Pilotage services and Ship owners/operators
should ensure that personnel operating ACD units receive a through and comprehensive
understanding of the theory behind the operation of such units and be trained in their efficient
and effective use to ensure the safety and security of life and property.
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 19
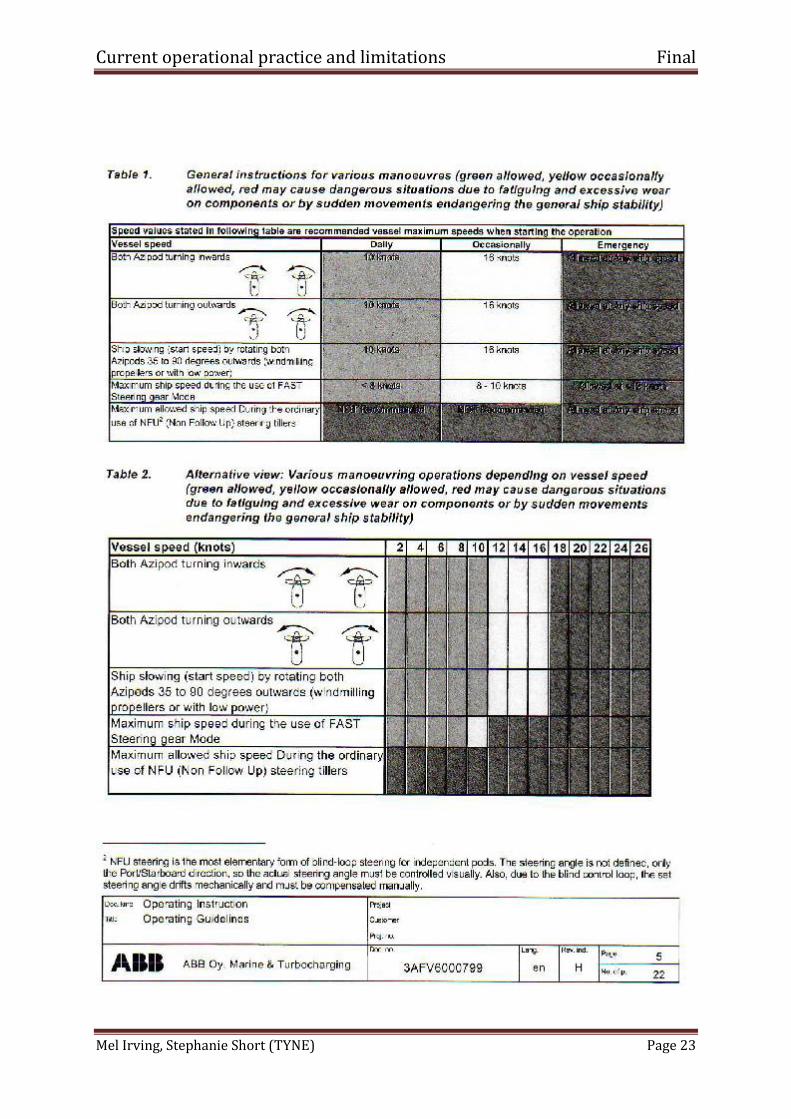
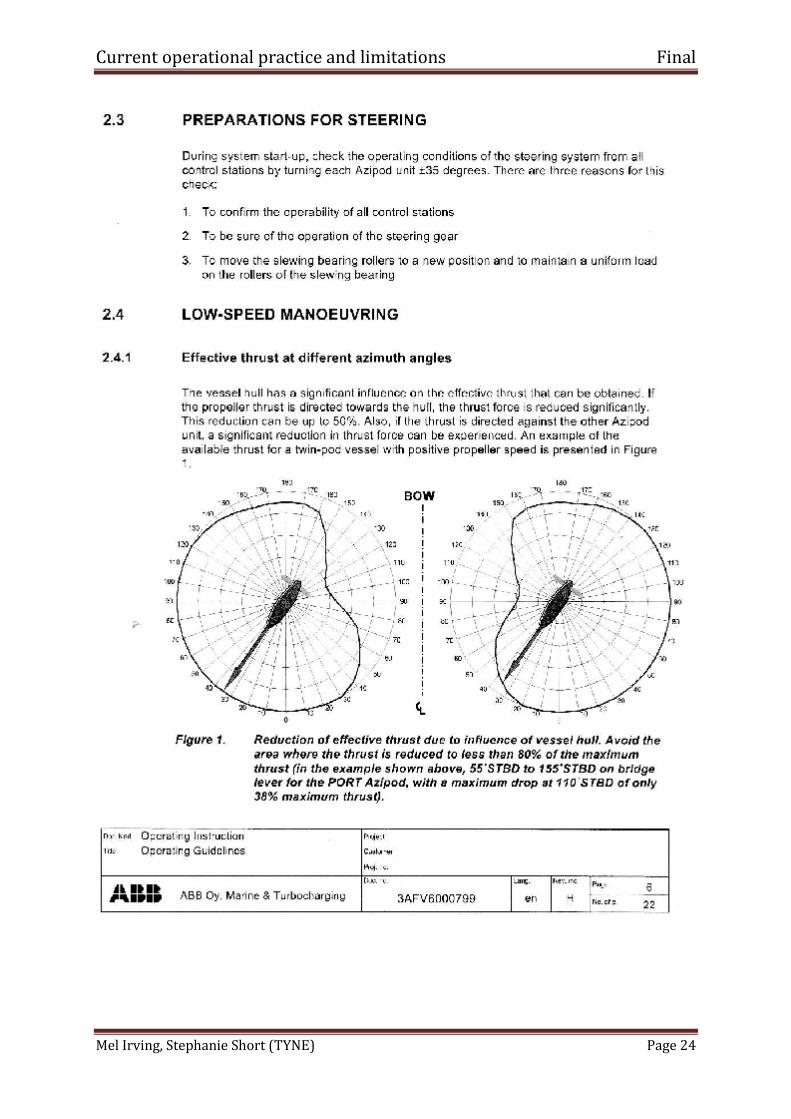
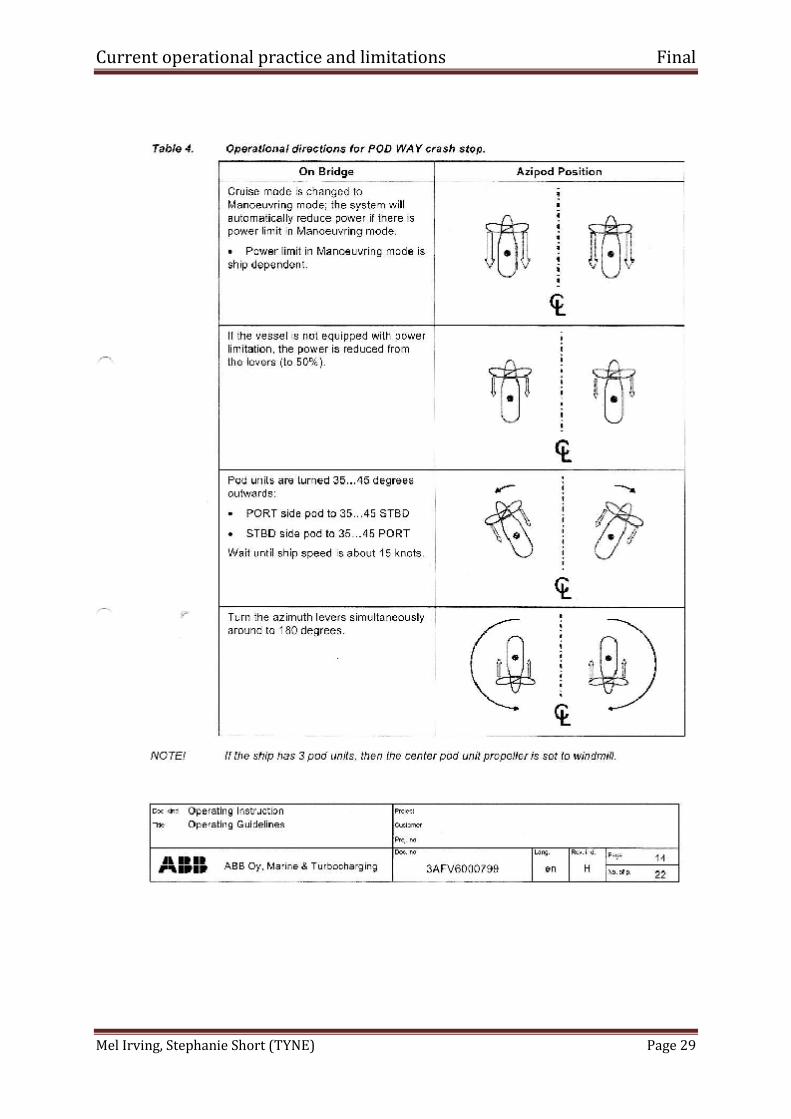
7. APPENDIX
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 20
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 21
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 22
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 23
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 24
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 25
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 26
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 27
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 28
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 29
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 30
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 31
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 32
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 33
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 34
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 35
Current operational practice and limitations Final
Mel Irving, Stephanie Short (TYNE) Page 36
Related Documents











