1 REKAYASA PERFORMANSI ANALOG KE DIGITAL PADA SISTEM KENDALI PID DI LABORATORIUM DASAR SISTEM KENDALI Fiktor Sihombing Program Studi Teknik Elektro Fakultas Teknik Universitas HKBP Nommensen, Medan Jl. Sutomo No. 4A Telepon (061)4522922;4522831 Fax 4571426 Medan 20234 E-mail : [email protected] ABSTRACT On the basis of laboratory control systems, lab experiments conducted there are two types of speed control and position control. Students always do practice activities to analyze and manipulate the speed or position control system with PID controllers. The final result of the practice is to obtain system performance by changing the control parameters P, I and D and combinations. Whenever do change control parameters, the output performance of the system is generated through equipment XY recorder or plotter as the appearance or performance recording system in analog form, where the equipment is outside the controlled system. Later in the performance analysis will be done by the students practice. Obstacles often faced by students is difficult to make measurements (readings) of the output performance results obtained accurately, because in the form of analog output response performance. To overcome these obstacles can be done by compensating the existing system with one element / Digital Tachometer components that can display output performance in the form of a digital display in numeric form, the working principle, that the potentiometer output with DC Drive dikoppel bonded acrylic-glass disc through belt jagged in such a way. Output DC drive is connected to the encoder, thereby resulting performance DC servo motor performance analog to digital in the numeric display. Keywords : Analysis and performance engineering systems, Modeling of dc motor, PID controler components, PID controller I. PENDAHULUAN 1.1. Latar Belakang Masalah teknik sistem kendali adalah analisis dan rekayasa. Analisis adalah untuk menyelidiki sifat-sifat dari suatu sistem yang ada, sedangkan rekayasa adalah pemilihan dan penyusunan komponen sistem yang melaksanakan fungsi/tugas tertentu yang disebut spesifikasi performansi. Berdasarkan pada kondisi laboratorium dasar sistem kendali, program studi teknik elektro Fakultas Tehknik Universitas HKBP Nommensen, mahasiswa praktikan selalu melakukan kegiatan praktek untuk menganalisis dan merekayasa sistem pengendalian kecepatan atau posisi. Hasil akhir dari melakukan praktek tersebut adalah memperoleh performansi sistem. Laboratorium dasar sistem kendali hingga saat ini hanya memiliki komponen X-Y recorder dan Plotter sebagai penampakan atau perekam performansi sistem dalam bentuk analog. Dalam kenyataannya dalam melakukan analisis dan rekayasa output sistem, mahasiswa sangat terkendala untuk menganalisis performansi analog tersebut. Oleh karena itu, sebagai kepala

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
REKAYASA PERFORMANSI ANALOG KE DIGITALPADA SISTEM KENDALI PID
DI LABORATORIUM DASAR SISTEM KENDALIFiktor Sihombing
Program Studi Teknik Elektro Fakultas Teknik Universitas HKBPNommensen, Medan Jl. Sutomo No. 4A Telepon (061)4522922;4522831 Fax
4571426 Medan 20234 E-mail : [email protected]
ABSTRACT
On the basis of laboratory control systems, lab experiments conducted there are two types ofspeed control and position control. Students always do practice activities to analyze andmanipulate the speed or position control system with PID controllers. The final result of thepractice is to obtain system performance by changing the control parameters P, I and D andcombinations. Whenever do change control parameters, the output performance of the system isgenerated through equipment XY recorder or plotter as the appearance or performance recordingsystem in analog form, where the equipment is outside the controlled system. Later in theperformance analysis will be done by the students practice. Obstacles often faced by students isdifficult to make measurements (readings) of the output performance results obtained accurately,because in the form of analog output response performance. To overcome these obstacles can bedone by compensating the existing system with one element / Digital Tachometer componentsthat can display output performance in the form of a digital display in numeric form, theworking principle, that the potentiometer output with DC Drive dikoppel bonded acrylic-glassdisc through belt jagged in such a way. Output DC drive is connected to the encoder, therebyresulting performance DC servo motor performance analog to digital in the numeric display.
Keywords : Analysis and performance engineering systems, Modeling of dc motor, PIDcontroler components, PID controller
I. PENDAHULUAN1.1. Latar Belakang
Masalah teknik sistem kendali adalah analisis dan rekayasa. Analisisadalah untuk menyelidiki sifat-sifat dari suatu sistem yang ada, sedangkanrekayasa adalah pemilihan dan penyusunan komponen sistem yangmelaksanakan fungsi/tugas tertentu yang disebut spesifikasi performansi.
Berdasarkan pada kondisi laboratorium dasar sistem kendali, programstudi teknik elektro Fakultas Tehknik Universitas HKBP Nommensen,mahasiswa praktikan selalu melakukan kegiatan praktek untuk menganalisis danmerekayasa sistem pengendalian kecepatan atau posisi. Hasil akhir darimelakukan praktek tersebut adalah memperoleh performansi sistem.Laboratorium dasar sistem kendali hingga saat ini hanya memiliki komponenX-Y recorder dan Plotter sebagai penampakan atau perekam performansisistem dalam bentuk analog. Dalam kenyataannya dalam melakukan analisisdan rekayasa output sistem, mahasiswa sangat terkendala untukmenganalisis performansi analog tersebut. Oleh karena itu, sebagai kepala

2
laboratorium yang segaligus pemberi praktikum merasa perlu untukmeningkatkan pengetahuan dan kemampuan mahasiswa dalammelakukan analisis dan rekayasa performansi sistem pada saat melakukanpraktikum dilaboratorium yaitu dengan melakukan modifikasi sistem dengancara kompensasi suatu komponen yang mampu menghasilkan performansinumeric atau Digital dengan demikian. mahasiswa praktikan akan mudahmelakukan analisis dan rekayasa performasi sudah sistem.
1.2. Perumusan MasalahBentuk performansi berupa respon keluaran (output) suatu sistem dengan
masukan unit step, pada umumnya dinyatakan seperti Gambar 1,
Gambar 1. Performansi Respons Analog
Performansi digital adalah performansi dengan tampilan dalam bentuk numeriksecara presisi, misalnya dihasilkan 0leh komponen Tachometer Digital .Bentuk performansi analog yang diperoleh dilaboratorium dasar sistem kendali,adalah seperti ditunjukkan Gambar. 2. performansi ini akan dihasilkan menjadiperformansi digital seperti ditunjukkan Gambar. 3
Gambar 2. Performansi Dalam Bentuk Analog

3
Gambar 3. Performansi Digital DaLam Bentuk Numerik
1.3. Tujuan PenelitianMelakukan modifikasi dan rekayasa respon performansi output dalam
bentuk analog pada sistem kendali kecepatan dengan pengendali PID ke sistemperformansi dgital dengan mengkompensasikan beberapa kompompen kesistem awal.yang sudah ada. Dengan demikian mahasiswa praktikan akan lebihmudah dan cepat memahami analisis dan rekayasa sistem.
1.4. Kontribusi PenelitianPenelitian ini akan memberikan kontribusi kepada (1) Pelaku Industri
yang akan melakukan modifikasi dan rekayasa sistem untuk memperolehspesifikasi performansi yang lebih cepat dan akurat dalam prosesproduksi, (2) Mahasiswa Fakultas Teknik khususnya program studi teknikelektro dan program studi terknik mesin, (3) Dosen-dosen yangmemberikan mata kuliah sistem digital dan rekayasa sistem. Untukmemperoleh spsifikasi performansi yang lebih akurat.
Penelitian ini juga menjadi suatu pengembangan laboratorium dasarsistem kendali dengan tambahan modul percobaan praktikum.
II. TINJAUAN PUSTAKA2.1. Pendahuluan. Untuk melakukan analisis dan rekayasa performansi sistem biasanyadilakukan analisa terhadap tanggapan transien yaitu tanggapan sistem yangberlangsung dari awal sampai diperoleh keadaan steady state. Untuk dapatmenganalisis dan merekayasa sistem, mahasiswa selalu mengalami kesulitanuntuk memperoleh performansi yang akurat terlebih untuk performansi dalambentuk wawasan waktu.2.2. Plant Pada Modul Percobaan
Motor servo DC merupakan suatu alat untuk mengubah energi dari aruslistrik DC menjadi energi mekanis dalam bentuk gerakan rotasi.
Gambar 4. Rangkaian Fisik Motor Servo DC

4
Motor Servo DC merupakan sumber tenaga penggerak yang banyak digunakandalam sistem kendali posisi dan kecepatan, dengan mengendalikan arus atautegangan pada kumparan jangkarnya. Rangkaian motor servo DC pengendalianarus jangkar dapat dilihat pada Gambar .5.
Gambar 5. Rangkaian Motor Servo DC Pengendalian Arus Jangkar
Torsi dirumuskan oleh persamaan (1).
aa iK (1)
di mana :
ff iK (2)
Dengan Ka adalah konstanta kumparan jangkar dan Kf adalah konstantakumparan medan magnet. Untuk arus kumparan medan magnet konstan, fluks yang dihasilkan juga konstan dan torsi yang dihasilkan sesuai dengan arah aruskumparan magnet sehingga :
aiK (3)
di mana
aKK (4)
Dengan K adalah konstanta dari torsi motor. Tegangan induksi eb dinyatakandengan,
dt
dKe m
bb
(5)
Di mana eb adalah tegangan emf balik dan Kb adalah konstanta emf balik. DariGambar 2. dapat dinyatakan persamaan differensian motor servo,
abaaa
a eeiRdt
diL
(6)Arus pada kumparan jangkar menghasilkan torsi yang bekerja pada momeninersia dan gesekan sehingga :
am
mm
M iKdt
db
dt
dJ
2
2
(7)Jika diasumsikan semua syarat kondisi awal adalah nol, sehingga diperolehtransformasi Laplace untuk persamaan (5), (6) dan (7) sebagai berikut :
sEssK bmb (8)

5
sEsEsIRsL abaaa (9)
ssIKssbsJ ammm 2
(10)Dengan Ea(s) sebagai fungsi masukan dan m(s) sebagai fungsi keluaran makadapat digambarkan diagram blok seperti Gambar .6.
aa RsL 1
mm bsJs 1
sKb
Gambar .6. Diagram Blok Motor Servo DC Pengendalian Arus Jangkar
Fungsi transfer motor servo DC pengendalian arus jangkar dapat dinyatakandengan,
bmamamamaa KKbRsJRbLsJLs
K
sE
s
2
(11)Induktansi La biasanya kecil sehingga dapat diabaikan maka, bmamaa KKbRsJRs
K
sE
s
(12)Jika
bmam KKbR
KK
(13)Dan
bma
mam KKbR
JRT
(14)
Sehingga persamaan (12) menjadi
1
sTs
K
sE
ssG
m
m
a
mm (15)
2.3. Pengendali PIDPengendali PID merupakan pengendali yang menggabungkan tiga aksi
pengendalian yaitu aksi kendali Proporsional, aksi kendali Integral dan aksikendali Derivatif.

6
2.3.1. Aksi Kendali Proporsional (P)Pada jenis pengendali P (proporsional), perbandingan antara sinyal
input pengendali u(t) dan sinyal error e(t) merupakan suatu besaran penguatanproporsional. Hubungan antara output pengendali u(t) dan sinyal error e(s)adalah :
u(t) = Kpe(t) (16)
atau dapat dinyatakan dengan,
(17)
dimana, Kp adalah proportional sensitivity atau penguatan (gain)
Penambahan harga KP akan menaikkan penguatan (gain) sistem.Penguatan ini akan mempercepat waktu mencapai steady-state danmengurangi error steady-state. Kelemahan pengendali Proporsional (P)adalah, apabila penambahan besar KP terus dilakukan, hasilnya akan
mengakibatkan sistem menjadi tidak stabil,
2.3.2. Aksi Kendali Integral (I)Pengendali jenis I (Integral) berfungsi untuk mencegah kesalahan, dan
pada umumnya digunakan apabila kita ingin mempertahankan variabel prosesagar tetap pada nilai kerja nominal dan juga dalam keadaan dimana perubahan-perubahan variabel hanya disebabkan oleh perubahan beban. pengendali I(Integral) sebaiknya digunakan hanya apabila error steady-state yang terjaditidak dapat ditolerir. Jika error steady-state tidak ada atau dapat ditolerir makacukup menggunakan pengendali PD (Proporsional plus Derivative) saja.
2.3.3. Aksi kendali Derivatif (D)Pengendali Derivative berfungsi untuk memperbaiki/mempercepat
respon menuju keadaan steady-state. Jika Pengendali Derivative diikutsertakansebagai pengendali akan memberikan efek menstabilkan sistem dengan caramemperbesar phase lead terhadap gain loop kontrol yaitu dengan mengurangipahse lag.
2.3.4. Pemakaian Dengan Kombinasi.Pengendali Proportional dalam prakteknya tidak baik berdiri sendiri,
demikian juga Pengendali Integral dan juga Pengendali Derivative. Karenamasing-masing jenis Pengendali tersebut memiliki kelemahan dan kelebihansetiap masing-masing Pengendali. Oleh karena itu pada umumnya rekayasasistem kendali bertujuan untuk memenuhi spesifikasi yang sudah ditetapkanmisalnya ketelitian, kecepatan respon menuju steady-state, lonjakan (maksimumovershoot) dan error steady-state. Akan tetapi masing-masing spesifikasitersebut satu sama lain akan saling mempengaruhi.
7
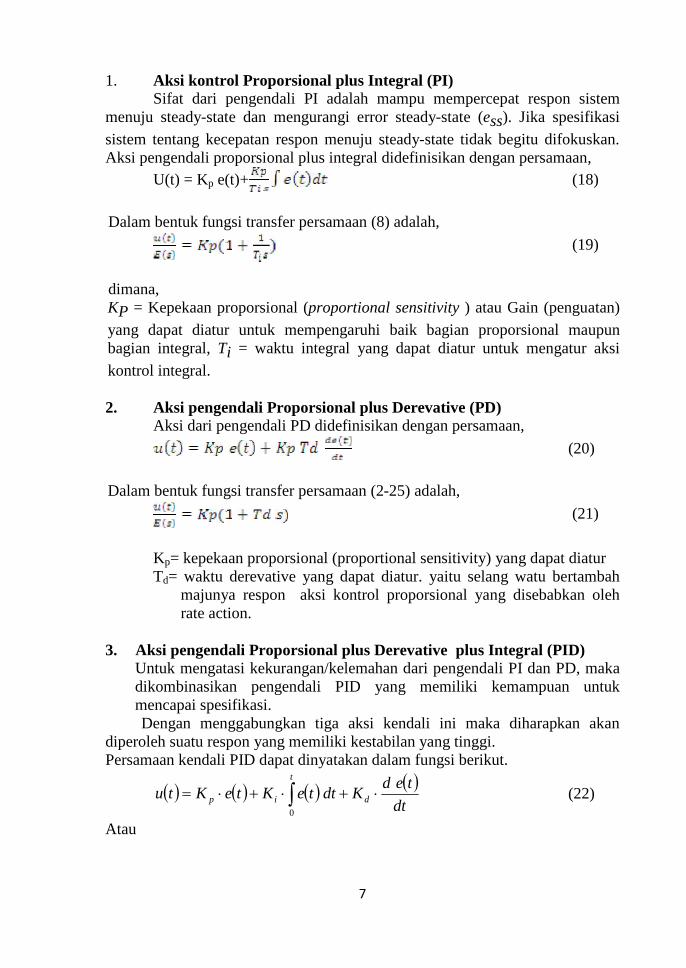
1. Aksi kontrol Proporsional plus Integral (PI)Sifat dari pengendali PI adalah mampu mempercepat respon sistem
menuju steady-state dan mengurangi error steady-state (ess). Jika spesifikasi
sistem tentang kecepatan respon menuju steady-state tidak begitu difokuskan.Aksi pengendali proporsional plus integral didefinisikan dengan persamaan,
U(t) = Kp e(t)+ (18)
Dalam bentuk fungsi transfer persamaan (8) adalah,
(19)
dimana,KP = Kepekaan proporsional (proportional sensitivity ) atau Gain (penguatan)
yang dapat diatur untuk mempengaruhi baik bagian proporsional maupunbagian integral, Ti = waktu integral yang dapat diatur untuk mengatur aksi
kontrol integral.
2. Aksi pengendali Proporsional plus Derevative (PD)Aksi dari pengendali PD didefinisikan dengan persamaan,
(20)
Dalam bentuk fungsi transfer persamaan (2-25) adalah,
(21)
Kp= kepekaan proporsional (proportional sensitivity) yang dapat diaturTd= waktu derevative yang dapat diatur. yaitu selang watu bertambah
majunya respon aksi kontrol proporsional yang disebabkan olehrate action.
3. Aksi pengendali Proporsional plus Derevative plus Integral (PID)Untuk mengatasi kekurangan/kelemahan dari pengendali PI dan PD, makadikombinasikan pengendali PID yang memiliki kemampuan untukmencapai spesifikasi.Dengan menggabungkan tiga aksi kendali ini maka diharapkan akan
diperoleh suatu respon yang memiliki kestabilan yang tinggi.Persamaan kendali PID dapat dinyatakan dalam fungsi berikut.
dt
tedKdtteKteKtu d
t
ip 0
(22)
Atau

8
t
di
p dt
tedTdtte
TteKtu
0
1(23)
Dimana Ti merupakan konstanta waktu integral dan Td adalah konstantawaktu derivatif. Dalam bentuk transformasi laplace dapat dituliskan.
sK
s
KK
sE
sUsG d
ipC (24)
Atau
sT
sTK
sE
sUsG d
ipC
11 (25)
Hubungan antara gain pengendali dan konstanta waktu,
dpd TKK (26)
Dan
i
pi T
KK (27)
Sehingga fungsi transfer kontroler GC(s) menjadi
sT
KsTKsTTKsG
i
pipdipC
2
(28)
Dalam bentuk diagram blok dapat digambarkan sebagai berikut :
Gambar 7. Diagram Blok Sistem Kendali Dengan Pengendali PID
+++
Kp
s
K i
sKd
P
I
D
+- G(s)E(s) U(s)
Plant
Kontroler
Y(s)R(s)
+-
E(s)sK
s
KK d
ip G(s)
U(s)
Kontroler Plant
Y(s)R(s)
9
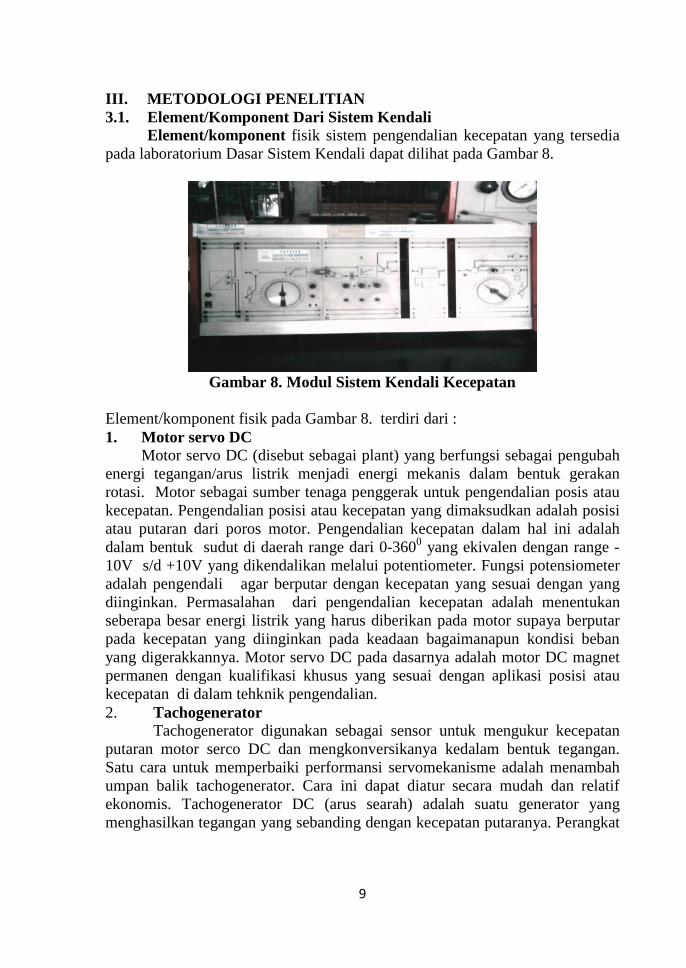
III. METODOLOGI PENELITIAN3.1. Element/Komponent Dari Sistem Kendali
Element/komponent fisik sistem pengendalian kecepatan yang tersediapada laboratorium Dasar Sistem Kendali dapat dilihat pada Gambar 8.
Gambar 8. Modul Sistem Kendali Kecepatan
Element/komponent fisik pada Gambar 8. terdiri dari :1. Motor servo DC
Motor servo DC (disebut sebagai plant) yang berfungsi sebagai pengubahenergi tegangan/arus listrik menjadi energi mekanis dalam bentuk gerakanrotasi. Motor sebagai sumber tenaga penggerak untuk pengendalian posis ataukecepatan. Pengendalian posisi atau kecepatan yang dimaksudkan adalah posisiatau putaran dari poros motor. Pengendalian kecepatan dalam hal ini adalahdalam bentuk sudut di daerah range dari 0-3600 yang ekivalen dengan range -10V s/d +10V yang dikendalikan melalui potentiometer. Fungsi potensiometeradalah pengendali agar berputar dengan kecepatan yang sesuai dengan yangdiinginkan. Permasalahan dari pengendalian kecepatan adalah menentukanseberapa besar energi listrik yang harus diberikan pada motor supaya berputarpada kecepatan yang diinginkan pada keadaan bagaimanapun kondisi bebanyang digerakkannya. Motor servo DC pada dasarnya adalah motor DC magnetpermanen dengan kualifikasi khusus yang sesuai dengan aplikasi posisi ataukecepatan di dalam tehknik pengendalian.2. Tachogenerator
Tachogenerator digunakan sebagai sensor untuk mengukur kecepatanputaran motor serco DC dan mengkonversikanya kedalam bentuk tegangan.Satu cara untuk memperbaiki performansi servomekanisme adalah menambahumpan balik tachogenerator. Cara ini dapat diatur secara mudah dan relatifekonomis. Tachogenerator DC (arus searah) adalah suatu generator yangmenghasilkan tegangan yang sebanding dengan kecepatan putaranya. Perangkat
10
ini digunakan sebagai suatu tranducer yang mengubah kecepatan putaran dariporos motor servo DC mejadi tegangan atau arus yang sebanding .3. Power Supply.
Komponent ini berfungsi sebagai suppy sumber energi yangdiperlukan oleh sistem. Karena energi yang tersedia dilaboratorium Dasarsistem kendali adalah energi listrik (tegangan/arus bolak-balik (AC)), makauntuk dapat digunakan oleh komponen sistem yang ada, maka energi listriktersebut harus terlebih dahulu diubah (disearahkan) menjadi tegangan/arussearah (DC) atau disebut berpulsa (pulsating DC), yang selanjutnya harusdiratakan (filter) menjadi tegangan/arus yang tidak berubah-ubah. Untukpenggunaan energi (tegangan/arus searah (DC) yang sebaik-baiknya, makadiperlukan suatu regulasi tegangan dengan demikian rangkaian elektronik yangada dalam setiap komponent sistem yang digunakan dapat bekerja dengansebaik-baiknya. Power Supply inilah yang berfungsi sebagai sumber daya kekomponen-komponen sistem yang digunakan dalam modul percobaan. PowerSupply menyediakan +15 V dan (+ 5 V). Setiap komponen sistem yangdigunakan dihubungkan melalui Connector Plug . Apabila tegangan dinyatakandalam tanda kurung (+ 5 V) hal ini berarti tidak diperlukan oleh komponen yangbersangkutan, akan tetapi dapat digunakan sebagai tegangan suplay untukkomponen yang membutuhkan saja.4. Potensiometer
Pada sistem pengendaian kecepatan, digunakan dua buah komponenfisik potensiometer yang berfunsi sebagai input set-point dan sebagai sensoroutput yang dikoppel ke poros motor. Potensiometer terdiri dari resistor tigaterminal dengan sambungan geser yang membentuk pembagi tegangan yangdapat diposisikan atau disebut sebagai resistor variabel atau rheostat.Potensiometer bekerja dengan menggatur tegangan dari power supply sebagaiinput dari motor. Potensiometer dapat mensupply tegangan dengan besarantegangan 0 volt sampai 10 Volt atau -10 volt sampai + 10 V0lt, untukmemenuhi persyaratan. tegangan yang stabil dan kompatibel dengan semuamasukan dari semua komponen-komponen sistem, maka tegangan diaturmelalui skala besar di bawah piringan kaca akrilik, disesuaikan dalam rentangsudut 00 sampai 3600.5. Pengendali PID
Pengendali PID merupakan pengendali yang menggabungkan tiga aksipengendalian yaitu aksi kendali Proporsional, aksi kendali Integral dan aksikendali Derivatif. Masing-masing pengendali tersebut dalam prakteknya tidakbaik berdiri sendiri, karena masing-masing jenis pengendali tersebut memilikikelemahan dan kelebihan masing-masing. Oleh karena itu pada umumnyarekayasa sistem kendali bertujuan untuk memenuhi spesifikasi performansiyang sudah ditetapkan misalnya ketelitian, kecepatan respon menuju steady-state, lonjakan (maksimum overshoot) dan error steady-state. Akan tetapi

11
masing-masing spesifikasi tersebut satu sama lain akan saling mempengaruhi.Disatu pihak diinginkan mengurangi error steady-state sebanyak mungkin, akantetapi hal tersebut akan mengakibatkan osilasi, dengan demikian akanmemperlama waktu menuju steady-state. Sedangkan dipihak lain responterhadap semua perubahan input boleh terjadi tetapi waktu sesingkat singkatnya,akan tetapi dengan lonjakan dan osilasi sekecil mungkin, untuk mengatasi hal-hal yang diuraikan di atas maka harus dilakukan penggabungan (kombinasi)masing-masing jenis pengendali. Penjelasan pengendali P, I, dan D telahdiuraikan pada pasal 2.3 di atas.3.2. Petunjuk aplikasi PID
Untuk suatu sistem dengan pengendali PID, pengendalian dapatdilakukan hanya dengan pengendali P (KP) saja, sedangkan pengendali I dan Ddinonaktifkan dengan memutar switch sampai OFF. Jika semua pengendali PIDdiperlukan, maka switch integral dan derivatif dapat ON (diaktifkan), dengancara mengatur waktu Tn dan TV masing-masing. Semua parameter (KP, Tn danTV) dapat disesuaikan secara independen satu sama lain. Range yang tersediaadalah KP = (0 to 1000)s, Tn = (1/1000 to 1000)s, Tv = (2/100 to 20)s. Sistemyang ada menawarkan berbagai aplikasi pengendali PID dengan tegangan ± 15V. Power Amplifier memberikan tegangan gain sebesar V=1 yang bertindaksebagai konverter impedansi dan memiliki input impedansi tinggi. dengan duaoutputnya. Amplifier, untuk menguatkan sinyal output yang berasal daripengendali yang bernilai kecil maka perlu penambahan komponen penguat atauamplifier. Amplifier akan menguatkan sinyal yang dibutuhkan untukmenyesuaikan daya masukan yang dibutuhkan aktuator serta untukmeningkatkan respon motor apabila dibebani.3.3. Memperoleh Performansi Analog
Untuk memperoleh performansi analog, Motor servo DC dikendalikanmelalui sumber tegangan eksternal, (power supply) dengan tegangan maksimal15 V. Untuk pengendalian posisi ataupun kecepatan, maka setiap komponensistem dihubungkan dengan Connector Plug pada setiap titik. Responperformansi posisi ataupun kecepatan dalam bentuk analog, direkam melaluikomponen X-Y recorder.3.4. Memperoleh Performansi DigitalAda beberapa cara yang sering digunakan untuk memperoleh performansidigital diantaranya menambah atau mengkompensi sistem analog denganAnalog to Digital Converter dan Digital to Analog Comverter (ADC danDAC). Akan tetapi yang dilakukan dalam penelitian ini tidaklah menggunakankomponen tersebut melainkan dengan cara mengkompensasi output sistemanalog denga cara merekayasa output Motor servo DC melalui kompensasipotensiometer output dengan DC Drive yang dilengkapi dengan Piringanakrilik-kaca dengan tepi bagian luar dilengkapi dengan raster terdiri dari 60

12
terang/gelap. yang terhubung ke poros motor servo DC melalui kopling sabukbelt akan dihasilkan performansi digital
IV. PEMBAHASAN4.1. Pendahuluan
Modul percobaan yang melakukan pengendalian kecepatan adalahmenkopling poros motor servo DC dengan satu potensiometer output, dengaumpan balik sebuah tachogenerator . Dengan menkompensasi potensiometeroutput (Terlebih dahulu membentuk poros belt) ke DC Drive yang dilengkapidengan Piringan akrilik-kaca dengan tepi bagian luar dilengkapi dengan rasterterdiri dari 60 terang/gelap seperti ditungjukkan Gambar 9.
Gambar 9. DC Drive dikopling Piringan akrilik-kaca
output DC drive dihubungkan ke tachometer digital. Tachometer digital adalahkomponent pengujian yang direkayasa untuk mengukur kecepatan rotasi dariporos motor. Komponent ini menghasilkan output digital yang tampilannyanumerik. Pada prinsipnya rangkain tachometer digunakan untuk mengukurkecepatan poros motor dengan prinsip menghitung frekuensi rotasi dari motor.Frekuensi dapat dihitung dengan menekan tombol yang membuka countergerbang atau melalui koneksi eksternal yang mengaktifkan gerbang secaralangsung dan tidak akan ada tampilan yang muncul pada layar selama prosespenghitungan sedang berlangsung. Hanya sekali proses penghitungandilakukan setelah dihentikan dengan cara melepaskan tombol push yang berartimengganggu perintah menghitung, kemudian register LATCH mengambil alihjumlah total kecepatan putaran poros motor yang kemudian menampilkanjumlah putaran dalam bentuk numerik. Sebuah basis waktu internalmenyediakan waktu gerbang 1 detik untuk pengukuran frekuensi. Hal inimemungkinkan untuk menampilkan kecepatan pengukuran piringan 60-divisi,dimana pulsa dihitung secara langsung dalam min-1. Display dari tachometerterdiri dari 4 dekade. Rangkaian komponent tachometer digital ditunjukkanGambar 10.

13
Gambar 10. Tachometer Digital
Saklar "BO" dan "BO + 90" berfungsi sebagai input pulsa. Jika saklar inidigerakkan dengan tegangan pulsa yang memiliki fase lag (dengan "BO + 90" ) makarangkaian logika yang menghubungkan kedua tegangan, dapat memicu diodapemancar cahaya. Selama operasi tachometer digital beerlangsung pada motor , makadioda pemancar cahaya menunjukkan apakah drive berputar maju atau mundur. Fungsitachometer digital dapat diperiksa dengan bantuan frekuensi internal yangmenghasilkan dua frekuensi tetap 100 Hz dan 10000 Hz. Modul percobaan disuplaidengan tegangan +5 V.
4.2. Komponent-komponent yang membentuk tachometer digitalUntuk menghasilkan performansi digital yang ditampilkan dalam bentuk
numerik, maka komponent-komponent yang dikompensasikan ke sistem awaladalah :
1. berfungsi sebagai rangkaian yang menghold ataumemegang data hingga perubahan Clock berikutnya berlangsung.Misalnya apabila data yang telah dihitung pada counter sebesar 250 RPM.Maka selama tidak ada perubahan Clock, maka Latch tetap memegangangka 250 dan tidak akan berubah, hingga ada data baru yang diberikan.
2. Counter adalah merupakan komponent yang berfungsimenghitung pulsa berdasarkan input clock yang diberikan yangselanjutnya di konversikan ke angka digital dengan setting nilai yang adapada counter.
3. Reset adalah komponent yang difungsikan secara manualdengan cara menekan tombol warna merah
4. LCD adalah komponent yang berfungsi sebagai displaytampilan kecepatan poros motor servo DC dalam bentuk digital numerik

14
5. Frequensi . adalah komponent yang berfungsi sebagai inputfrekuensi internal dan eksternal y,ang di berikan yaitu 100Hz untukfrekuensi 1Hz sampai 100 Hz sebagai input internal dan 10 kHz untukfrekuensi 10 kHz keatas sebagai input eksternal
6. Switch clock, adalah komponent yang berfungsi untukmeng-clock frekuensi jika di butuhkan
7. Input dan output, adalah komponent yang berfungsisebagai jalur sinyal input. Jalur atas pada komponen BO dan jalur bawahBO + 900. Dimana BO dan BO + 900 sama-sama merupakan output darimotor servo DC. Yang membedakan adalah Bo + 900 artinya memilikiselisih fasa 900 dari BO. Sinyal input yang di bawa adalah BO dan BO +900 akan diteruskan ke blok input yang berfungsi sebagai pembentukpulsa.
8. Reset setting . Adalah komponent yang berfungsi berfungsiuntuk mereset COUNTER setiap detik.
4.3. Plotter dan visual BasicPlotter dan Visual Basic merupakan komponen tambahan yang menjadi satu
kesatuan dari pemrograman, yang berfungsi sebagai perekaman respon performansianalog, sebagai pengganti X-Y Recorder. Fisik plotter ditunjukkan Gambar 8, danposisi tampilan respon performansi pada monitor komputer ditunjukkan Gambar 11.
Gambar 11. Fisik plotter
15
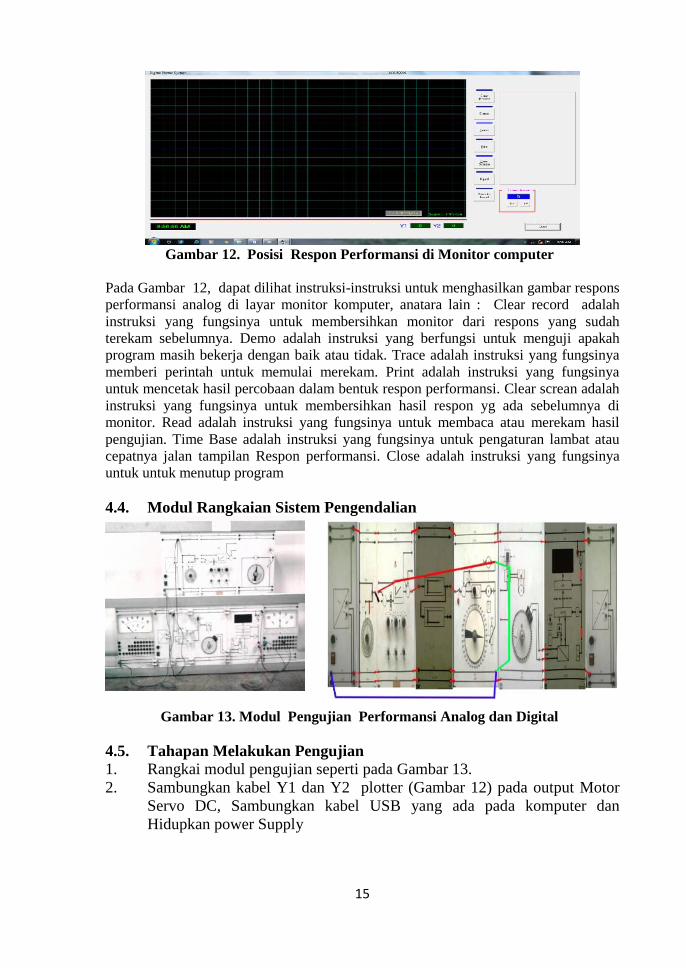
Gambar 12. Posisi Respon Performansi di Monitor computer
Pada Gambar 12, dapat dilihat instruksi-instruksi untuk menghasilkan gambar responsperformansi analog di layar monitor komputer, anatara lain : Clear record adalahinstruksi yang fungsinya untuk membersihkan monitor dari respons yang sudahterekam sebelumnya. Demo adalah instruksi yang berfungsi untuk menguji apakahprogram masih bekerja dengan baik atau tidak. Trace adalah instruksi yang fungsinyamemberi perintah untuk memulai merekam. Print adalah instruksi yang fungsinyauntuk mencetak hasil percobaan dalam bentuk respon performansi. Clear screan adalahinstruksi yang fungsinya untuk membersihkan hasil respon yg ada sebelumnya dimonitor. Read adalah instruksi yang fungsinya untuk membaca atau merekam hasilpengujian. Time Base adalah instruksi yang fungsinya untuk pengaturan lambat ataucepatnya jalan tampilan Respon performansi. Close adalah instruksi yang fungsinyauntuk untuk menutup program
4.4. Modul Rangkaian Sistem Pengendalian
Gambar 13. Modul Pengujian Performansi Analog dan Digital
4.5. Tahapan Melakukan Pengujian1. Rangkai modul pengujian seperti pada Gambar 13.2. Sambungkan kabel Y1 dan Y2 plotter (Gambar 12) pada output Motor
Servo DC, Sambungkan kabel USB yang ada pada komputer danHidupkan power Supply

16
3. Hubungkan potensiometer input ke catu daya dan output potensiometerke pengendali PID.
4. Set potensiometer pada posisi piringan menunjukkan nol (00), hargategangan pada titik Vw dengan ground yang terukur harus sama dengannol volt. Jika tidak diperoleh sama dengan nol, maka dapat dilakukandengan mencatat posisi piringan saat tegangan keluaranya nol, asumsikanposisi ini sebagai nol.
5. Atur set point pada tegangan input + 5 volt, hal ini ikivalen denganmemutar potensiometer input searah jarum jam ke angka 900
6. Untuk memperoleh suatu respon yang baik, maka lakukan pengaturanharga-harga parameter gain PID sedemikian rupa atau sesuai denganyang diinginkan. Untuk pemberian setiap nilai KP rekam responperformansi keluaran dapat dilihat pada tampilan monitor komputer danhasil ini dapat diprint out.
4.6. Hasil Pengujian dan Analisis1. Pengendali P [P = 0,5 (Tegangan input 5V dan skala output 2V)]
Gambar 14a. Performansi Analog untuk P=0,5
Gambar 14b. Performansi Digital dalam bentuk numerik untuk P=0,5

17
2. Pengendali PI (P= 0.5, I= 0.05)
Gambar.15a. Performansi Analog (P= 0.5, I= 0.05)
Gambar.15b. Performansi Digital dalam bentuk numeric (P= 0.5, I= 0.05)
3. Pengendali PD P = 0.5 ; D = 0.02 x 0.01
Gambar.16a. Performansi Analog P = 0.5 ; D = 0.02 x 0.01
Gambar .16b. Performansi Digital dalam bentuk numeric P = 0.5 ;D = 0.02 x 0.01

18
4. Pengendali PID [ P=0.5 ; I= 0.05 ; D= 0,01]
Gambar.17a. Performansi Analog P=0.5 ; I= 0.05 ; D= 0,01
Gambar.17b. Performansi Digital dalam bentuk numeric P=0.5 ; I= 0.05 ;D= 0,01
4.7. AnalisisDengan menggunakan tahapan penngujian yang dilakukan seperti yang
diuraikan pada 4.5. performansi analog dan performansi digital dalam bentuknumerik hasilnya ditunjukkan pada Gambar 14 hingga Gambar 17. Padapengendali Proporsional dengan gain (penguatan) P= 0,5 x 1 performansi digitaldalam tampilan numerik 158 pada LCD tachometer yang artinya frekuensikecepatan poros motor sebesar 158. Perubahan harga Kp dapat dilakukan dengancara menaikkan atau mengurangi penguatan. Perubahan ini dapat dilakukanuntuk tujuan mempercepat ataupun memperlambat kecepatan poros motor,sesuai spesifikasi yang ditetapkan sebelumnya.
Pada pengendali P dikombinasikan dengan pengendali I disebutPengendali PI, performansi kecepatan poros motor yang diperoleh 149,perubahannya tidak terlalu jauh karena pengendali PI mampu mempercepatrespon sistem yang mengurangi error steady state.
Pada Pengendali P dikombinasikan dengan pengendali D yang disebutPengendali PD, performansi kecepatan poros motor yang diperoleh 133 yangartinya pengedali D berfungsi sebagai “rate-control”. Penguatan tersebut

19
menghasilkan koreksi yang berarti sebelum kesalahan bertambah besar. Jadifungsi pengendali D, adalah menghasilkan tindakan pengendalian yang cepat,hal ini sangat penting bagi sistem kendali yang perubahan bebanya terjadisecara tiba-tiba, karena dapat menghasilkan sinyal pengendali selama errorberubah. Pada saat pengendali P dikombinasikan dengan Pengendali I danPengendali D atau yang di sebut pengendali PID maka performansi kecepatanporos motor yang diperoleh 158, hal ini berarti performansi yang diperolehPengendali P dicapai kembali walaupun gain penguatan diperbesar akan tetapitidak menimbulkan ketidak stabilan.
V. KESIMPULANDengan mengkompensasikan Komponent-komponent yang membentuk
tachometer digital seperti yang diuraikan pada pasal 4.2. dan tahapan pengujianyang dilakukan seperti yang diuraikan pada 4.5. maka rekayasa performansianalog ke bentuk performansi digital dalam bentuk numerik berhasil dilakukandengan baik. Dengan demikian hasil rekayasa modul percobaan yang dilakukan,akan dapat membantu kemampuan mahasiswa untuk analisis dan rekayasaperformansi sistem.
DAFTAR PUSTAKABahram Shahian, Control System Design Using Matlab, Prentice – Hall
International Editions, London, 1993D’azzo, JJ and Houpis, CH. Control System Analysis and Synthesis” Second
Edition McGraw Hill5Fiktor Sihombing ”Buku Ajar Sistem Kontrol Dasar-dasar Teori Analisis dan
Disain”Gupta, SC and Hasdorff L” Fundamentals of Automatic Control” John
Wiley & Sons, 1970James R. Rowland, ”Linear Control Systems : Modeling, Analysis, and Design,
John Wiley & Sons, 1986John J. D’ Azzo “ Feedback Control Systems Analysis and Syntesis, Second
Eddition. Mc Graw-Hill International Book CompanyKatsuhiko Ogata ”Modern Control Enggineering” Second Edition. Prentice
Hall International. IncKatsuhiko Ogata ” Modern Control Enggineering” Third Edition. Prentice Hall
International. Inc 19978.
Related Documents