Sezione 4 Regolazione PID (Proporzionale Integrale Derivativa), messa a punto dei regolatori, verifiche sperimentali Prof. Ing. Cesare Saccani Prof. Ing. Augusto Bianchini Department of Industrial Engineering (DIN) - University of Bologna Viale del Risorgimento 2, 40136, Bologna – Italy Corso di Automazione Industriale: Modulo 2: Strumentazione e Automazione Industriale

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Sezione 4Regolazione PID (Proporzionale Integrale Derivativa), messa a punto dei regolatori, verifiche sperimentali
Prof. Ing. Cesare SaccaniProf. Ing. Augusto Bianchini
Department of Industrial Engineering (DIN) - University of BolognaViale del Risorgimento 2, 40136, Bologna – Italy
Corso di Automazione Industriale:
Modulo 2: Strumentazione e Automazione Industriale

Regolazione
• A due posizioni
• Proporzionale
• Integrale
• Derivativa
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale2

Regolazione a due posizioni
x = segnale della variabile controllata (segnale d’ingresso)
y = segnale di uscita.
X0 = valore desiderato di X corrisponde un valore di Y, detto
Y0 = valore che manterrebbe il segnale X0
3
X < X0 ⇒ Y = Y1 con Y1 > Y0 X > X0 ⇒ Y = Y2 con Y2 < Y0
Curva caratteristica di un regolatore a due posizioni
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

4
Regolazione a due posizioniRisposta di uno strumento di regolazione a due posizioni
Frequenza delle oscillazioni velocità di risposta del processo
Ampiezza delle oscillazioni ∆𝑌1 = 𝑌1 – 𝑌0 𝑒 ∆𝑌2 = (𝑌2– 𝑌0)
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

La variabile controllata va mantenuta attorno al valore di set point (x0)
Banda differenziale x = x2 – x1 (tra lo 0,1% e 2%)
5
Regolazione a due posizioni
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

6
Regolazione a due posizioniAumento di carico x ↓ valore medio < 𝑥0
Oscillazione non più simmetrica attorno al set point: - apertura il flusso è di poco superiore a quello necessario tempo di risalita lungo della variabile- chiusura perdita di energia più sensibile la variabile scende più rapidamente
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione a due posizioniRegolazione pneumatica: sistema ugello - paletta
7
Ugello chiuso P1 = P2Ugello totalmente aperto P’2 < P1Ugello parzialmente ostruito dalla lamina P’2 < P’’2 < P2
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione a due posizioniRegolazione pneumatica: sistema ugello - paletta
8
Aria compressa :Tubo restrizione R ugello B. Paletta mobile F : ostacola più o meno il deflusso in relazione alla sua maggiore o minore vicinanza alla sezione di uscita dell’ugello.
Ostruzione completa flusso di aria =0 P1 = P2. Ostruzione nulla P’2 < P1 ΔP = P1 – P’2 (perdita di carico su R)Ostruzione parziale perdita di carico localizzata all’uscita dell’ugello P’2 < P”2 < P2.
Nel caso 𝑆𝑒𝑧. 𝑝𝑎𝑠𝑠𝑎𝑔𝑔𝑖𝑜𝐵−𝐹 = 𝑆𝑒𝑧. 𝑝𝑎𝑠𝑠𝑎𝑔𝑔𝑖𝑜𝑅 𝜋𝑑𝑅
2
4= 𝜋𝑑𝐵𝑠
Supponendo:- spostamento davanti all’ugello come traslazione orizzontale anziché una rotazione intorno al fulcro H.- perdite di carico attraverso i due passaggi di uguale sezione uguali
per il valore di s che risolve l’equazione, si ha: P1 – P2 = P2 – P0 (con P0 = pressione esterna)
Supponendo P0 = 0 𝑃2 =𝑃1
2
𝑑𝑅= diametro della restrizione𝑑𝐵 = diametro dell’ugellos = distanza della lamina dall’ugello
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione a due posizioniRegolazione pneumatica: sistema ugello - paletta
9
Andamento di P2 nella zona compresa tra la restrizione e l’ugello in funzione della distanza tra esso e la lamina
La relazione tra distanza e pressione non è una relazione lineare
↓ Si fa lavorare l’elemento in un tratto limitato della curva che possa essere assimilato con sufficiente
approssimazione ad un tratto rettilineo.
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione a due posizioniRegolazione pneumatica: sistema ugello - paletta
10
Tratto approssimativamente rettilineo della curva:2 psi < p < 3 psi
0.075 mm < s < 0.125 mm
Amplificazionedel
segnalenecessaria
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione a due posizioniRelay pneumatico
11
restrizione
ugello
diaframma
sfogo libero
valvola sferica
molla a balestra
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione a due posizioniSistema di regolazione a due posizioni
12
Elemento sensibile posiziona l’indice e la paletta.
Spostamento dell’indice rispetto al controindice si muove l’asta 1-2 la paletta ruota intorno a 3 apertura o chiusura della luce sull’ugello.
Il relay è come un rubinetto a tre vie.
Se la paletta si allontana P1 ↓ la sfera sale chiusura dello sfogo libero l’aria compressa spinge la membrana della servo valvola a fine corsa.
Se la paletta si avvicina P1 ↑ nel soffietto la sfera chiude l’alimentazione la membrana della servo valvola si porta all’estremo opposto della sua corsa.
Difficile stazionemento su un valore intermedio↓
bruschi salti nel campo di variazione↓
azione a due posizioni.
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionaleX = valore istantaneo della variabile controllata X0 = valore iniziale della variabile controllata
Y = valore istantaneo della variabile in uscita Y0 = valore cheiniziale della variabile in uscita
13
Y = Y0 ± K (X – X0)
L’inclinazione della retta di lavoro dipende da K.
Se K’ < K basta una variazioneX’2 – X’1 < X2 – X1
Perché la valvola regolatrice apraDa 0 a 100%
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale
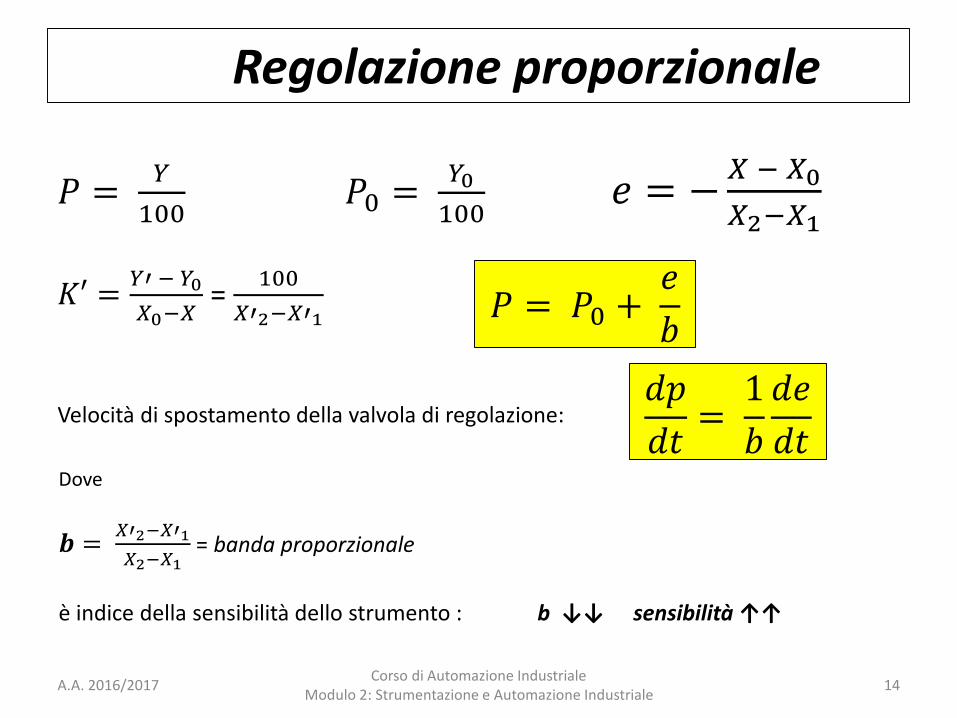
Regolazione proporzionale
𝑃 =𝑌
100𝑃0 =
𝑌0
100𝑒 = −
𝑋 − 𝑋0
𝑋2−𝑋1
𝐾′ =𝑌′ − 𝑌0
𝑋0−𝑋=
100
𝑋′2−𝑋′1
Velocità di spostamento della valvola di regolazione:
14
𝑃 = 𝑃0 +𝑒
𝑏
Dove
𝒃 =𝑋′2−𝑋′1
𝑋2−𝑋1= banda proporzionale
è indice della sensibilità dello strumento : b ↓↓ sensibilità ↑↑
𝑑𝑝
𝑑𝑡=
1
𝑏
𝑑𝑒
𝑑𝑡
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale
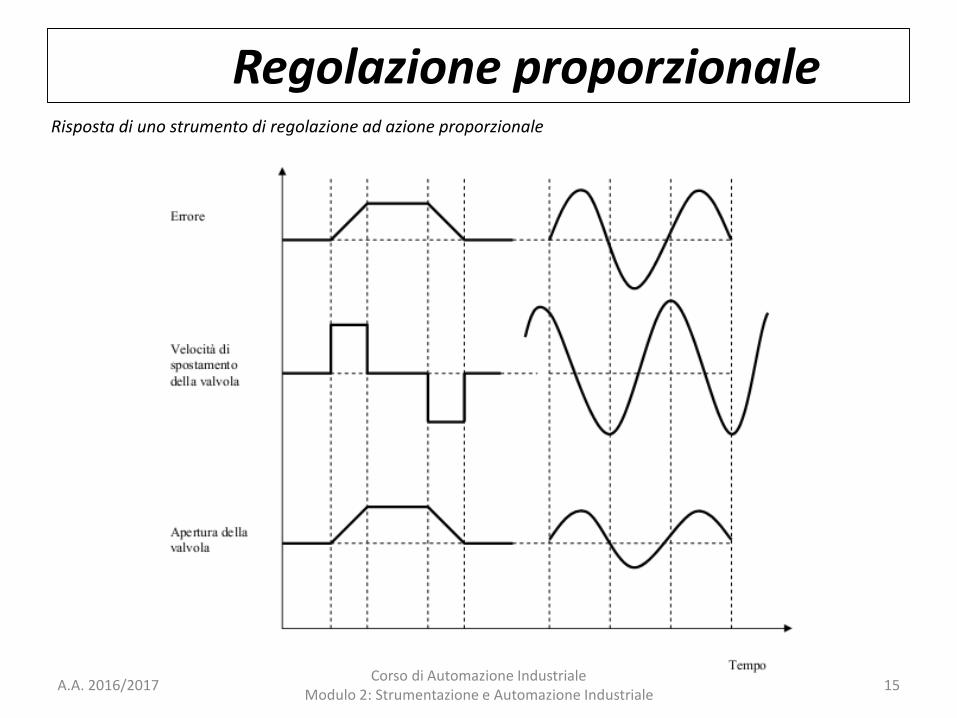
Regolazione proporzionale
15
Risposta di uno strumento di regolazione ad azione proporzionale
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionale
Sistema di regolazione proporzionale
16
𝑅𝑜𝑡𝑎𝑧𝑖𝑜𝑛𝑒 𝑎𝑡𝑡𝑜𝑟𝑛𝑜 𝑎 𝐶:𝑋𝑛𝑐𝐶𝑁
=𝑋𝑖𝐶𝐼
𝑅𝑜𝑡𝑎𝑧𝑖𝑜𝑛𝑒 𝑎𝑡𝑡𝑜𝑟𝑛𝑜 𝑎𝑑 𝐼:𝑋𝑐𝐶𝐼
=𝑋𝑖𝑁𝐼
𝑋𝑛 = 𝑋𝑛𝑐 + 𝑋𝑛𝑖 = γ𝑋𝑖 + 𝛿𝑋𝑐
𝛾 =𝐶𝑁
𝐶𝐼𝛿 =
𝑁𝐼
𝐶𝐼
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionaleComportamento di un sistema proporzionale
17
TA < TB
QA = cost
𝑐𝑝𝐴 𝜃𝐴𝑈 − 𝜃𝐴𝐼 𝑄𝐴 = 𝑐𝑝𝐵 𝜃𝐵𝐼 − 𝜃𝐵𝑈 𝑄𝐵
La valvola regola QB per mantenere Costante TA (variabile controllata).
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionaleComportamento di un sistema proporzionale
18
v
𝜃2 = 𝑡𝑒𝑚𝑝𝑒𝑟𝑎𝑡𝑢𝑟𝑎 𝑢𝑠𝑐𝑖𝑡𝑎 𝑐𝑜𝑛 𝑝 = 100%
𝜃1 = 𝑡𝑒𝑚𝑝𝑒𝑟𝑎𝑡𝑢𝑟𝑎 𝑢𝑠𝑐𝑖𝑡𝑎 𝑐𝑜𝑛 𝑝 = 0%
𝑆𝑒𝑡 𝑝𝑜𝑖𝑛𝑡: 𝜃0 =𝜃2 + 𝜃1
2
𝑝 = 0,5
H = punto di funzionamento
Se b=1 retta di lavoro e retta di carico si incontrano in H
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionaleComportamento di un sistema proporzionale
19
Cambiamento della variabile da 𝜃0 a 𝜃′ > 𝜃0
𝜃0 − 𝜃′′ :
𝜃′0 :
𝜃′0 − 𝜃′ :
[ 𝜃′2; 𝜃′1 ]:
Deviazione fra indice e controindice Necessaria per ottenere il nuovo grado di apertura della valvola
Nuovo valore del controindice
H’ : Nuovo punto di equilibrio
Scarto fre indice e controindice che produce un segnale di uscita corrispondente all’apertura della valvola richiesta da H’
Nuovo campo di funzionamento
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionaleComportamento di un sistema proporzionale
20
Intervento di una variazione di carico
Regolazione per mantenere costante il livello nel serbatoio.Livello del liquido α luce di passaggio della valvola
galleggiante
fulcro
valvola
Portata in uscita
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale
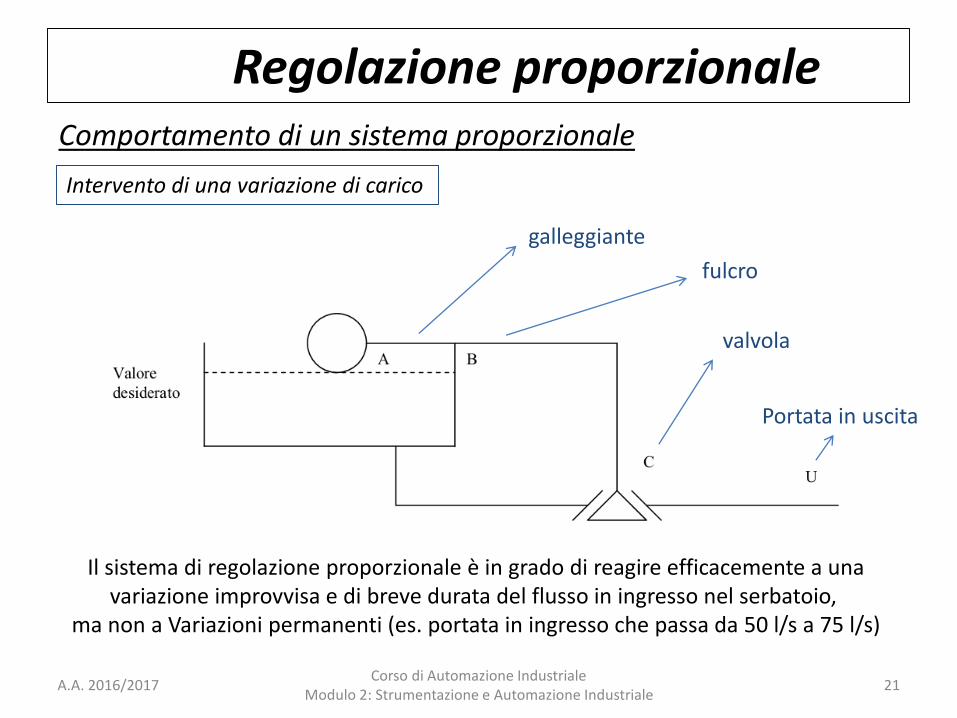
Regolazione proporzionaleComportamento di un sistema proporzionale
21
Intervento di una variazione di carico
Il sistema di regolazione proporzionale è in grado di reagire efficacemente a unavariazione improvvisa e di breve durata del flusso in ingresso nel serbatoio,
ma non a Variazioni permanenti (es. portata in ingresso che passa da 50 l/s a 75 l/s)
galleggiante
fulcro
valvola
Portata in uscita
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionale
Comportamento di un sistema proporzionale
22
Diminuzione di TB
TB ↓ QB ↑ perché sia TA = cost
Traslazione della retta di carico
Nuovo punto di equilibrio H’
θ’𝜃0 − 𝜃′
dipende dall’ampiezzadella banda proporzionale
dello strumento
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionale
Comportamento di un sistema proporzionale
23
Variazione dello scarto al variare della banda proporzionale
Variazione dello scarto al variare della banda proporzionalea una variazione dei carico costante
Lo scarto aumenta al cresceredella banda proporzionale
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionale
Comportamento di un sistema proporzionale
24
Riporto dell’indice sul valore desiderato mediante spostamento del controindice
Nuovo punto di equilibrio H’’
Spostamento della retta di lavoro ottenuto spostando il controindice sulla scala graduata
L’indice e il controindice coincidono solo
nella condizione di progetto
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionale
25
Curve di risposta di un processo munito di regolazione proporzionale
A.A. 2016/2017Corso di Automazione Industriale
Modulo 2: Strumentazione e Automazione Industriale

Regolazione proporzionale
26
Curva di risposta di un processo in cui la variabile, dopo una variazione di carico, venga riportata sul valore originario spostando il controindice sulla scala dello strumento
All’istante t1 interviene la variazione di carico la variabile viene mantenuta costante su un valore che differisce dal valore desiderato della quantità m (scarto) All’istante t2 viene modificato il valore desiderato spostando manualmente il controindice sulla scala graduata di una quantità opportuna m’ La variabile torna a coincidere con il valore originale.

Regolazione proporzionale
27
Regolazione proporzionale indicata nei processi con:
o piccole e rare variazioni di carico
o grande ricettività
o piccola velocità di risposta
o piccoli ritardi.

Regolazione proporzionale
Ricettività
28
𝑅𝑖𝑐𝑒𝑡𝑡𝑖𝑣𝑖𝑡à =𝑞𝑢𝑎𝑛𝑡𝑖𝑡à 𝑑𝑖 𝑒𝑛𝑒𝑟𝑔𝑖𝑎 𝑒𝑛𝑡𝑟𝑎𝑛𝑡𝑒 𝑛𝑒𝑙 𝑝𝑟𝑜𝑐𝑒𝑠𝑠𝑜
𝑐𝑜𝑟𝑟𝑖𝑠𝑝𝑜𝑛𝑑𝑒𝑛𝑡𝑒 𝑣𝑎𝑟𝑖𝑎𝑧𝑖𝑜𝑛𝑒 𝑑𝑒𝑙𝑙𝑎 𝑣𝑎𝑟𝑖𝑎𝑏𝑖𝑙𝑒 𝑚𝑖𝑠𝑢𝑟𝑎𝑡𝑎
Livello m3/m Pressione m3 / (kg/m2) Termico kcal/°C

Regolazione proporzionale
Ritardi
29
La presenza di ritardi notevoli limita la possibilità di usare una banda proporzionale stretta.
Essi sono responsabili dello sfasamento fra il valore istantaneo dell’errore e l’azione correttiva.
Lo sfasamento angolare fra variabile ed azione correttiva dipende dalle caratteristiche del sistema
Sfasamento fino a180°↓
Errore e azione correttiva in opposizione di fase↓
autoscillazione
𝑮𝑼𝑨𝑫𝑨𝑮𝑵𝑶 =𝑚𝑜𝑑𝑖𝑓𝑖𝑐𝑎𝑧𝑖𝑜𝑛𝑒 𝑎𝑝𝑝𝑜𝑟𝑡𝑎𝑡𝑎 𝑛𝑒𝑙 𝑝𝑟𝑜𝑐𝑒𝑠𝑠𝑜 𝑑𝑎𝑙𝑙′𝑎𝑧𝑖𝑜𝑛𝑒 𝑐𝑜𝑟𝑟𝑒𝑡𝑡𝑖𝑣𝑎
𝑚𝑜𝑑𝑖𝑓𝑖𝑐𝑎𝑧𝑖𝑜𝑛𝑒 𝑟𝑖𝑙𝑒𝑣𝑎𝑡𝑎 𝑑𝑎𝑙𝑙𝑜 𝑠𝑡𝑟𝑢𝑚𝑒𝑛𝑡𝑜 𝑐ℎ𝑒 ℎ𝑎 𝑔𝑒𝑛𝑒𝑟𝑎𝑡𝑜 𝑙′𝑖𝑛𝑡𝑒𝑟𝑣𝑒𝑛𝑡𝑜 𝑐𝑜𝑟𝑟𝑒𝑡𝑡𝑖𝑣𝑜

Regolazione proporzionale
30
Considerazioni finali:
↑ ritardi
↑ ampiezza banda proporzionale
↑ scarto a seguito di una variazione di carico

Azione integrale
31
𝑃 = 𝑃0 + 𝑓 න0
𝑡
𝑒 𝑑𝑡
𝑑𝑝
𝑑𝑡= 𝑓 𝑒
La valvola può rimanere in una posizione diversa da quella iniziale anche giunti a e=0;
Basta infatti che sia 0𝑡𝑒 𝑑𝑡 ≠ 0 .
t = istante correntet0 = 0 = istante inizialef = fattore di velocità
Velocità della valvola regolatrice:
costante per tuttoIl tempo in cui permane
l’errore

Azione integrale
32
La valvola regolatrice ritornerà nella sua posizione originale soltanto dopo che ci sarà stato un altro errore di segno opposto al primo e di valore tale che l’area compresa fra l’asse dei tempi e la curva errore-tempo sia uguale a quella corrispondente alla prima deviazione della variabile.

Azione integrale
33
Fattore di velocità
𝐹𝑎𝑡𝑡𝑜𝑟𝑒 𝑑𝑖 𝑣𝑒𝑙𝑜𝑐𝑖𝑡à =𝑃
𝑡 𝑒
percentuale dell’escursione della valvola
al minuto 100 𝑃
𝑡per variazione percentuale
della variabile 100𝑒 rispetto al range dello strumento.
𝑃 = 𝑃0 + 𝑓න0
𝑡
𝑒 𝑑𝑡𝑠𝑒 𝑒 = 𝑐𝑜𝑠𝑡
𝑃 = 𝑃0 + 𝑓 𝑒 𝑡 𝒇 =𝑃
𝑒 𝑡= 𝒇𝒂𝒕𝒕𝒐𝒓𝒆 𝒅𝒊 𝒗𝒆𝒍𝒐𝒄𝒊𝒕à
𝑠𝑒 𝑃0 =0

Azione integrale
34
Risposta di un processo munito di regolazione integrale
Primi istanti↓
intervento inadeguato a correggere squilibri rilevanti.
In un secondo tempo↓
azione correttiva fino a scarto nullo.
Azione integrale
35
Azione solo integrale indicata nei processi con:
o Piccoli ritardi
o Alta velocità di risposta
o Variazioni di carico piccole e graduali

Azione integrale
36
Regolazione ad azione proporzionale più integrale
𝑃 = 𝑃0 +𝑒
𝑏+ ℎ න
0
𝑡
𝑒 𝑑𝑡
𝑅𝑒𝑠𝑒𝑡 𝑟𝑎𝑡𝑒 =𝑃
𝑇 𝐵
Velocità di integrazione (reset rate)
Quante volte, nell’unità di tempo, la variazioneNella posizione dell’elemento finale di controllo
Dovuta all’azione integrale (P) ripete quella dovuta alla sola azione proporzionale (B)

Azione integrale
37
Regolazione ad azione proporzionale più integrale
𝑃 = 𝑃0 +𝑒
𝑏+ ℎ න
0
𝑡
𝑒 𝑑𝑡𝒉 = ൗ𝑟 𝑏
Infatti:
Regolaz. proporzionale 𝑃1= 𝑃0 +𝑒
𝑏
Azione integrale 𝑃2= 𝑃1 + ℎ 𝑒 𝑡
𝑅𝑒𝑠𝑒𝑡 𝑟𝑎𝑡𝑒 =𝑃
𝑇 𝐵=
𝑃2−𝑃1
𝑇 𝑃1−𝑃0
Sostituendo P1 e P2
𝒓 = 𝒃 𝒉 𝑃 = 𝑃0 +𝑒
𝑏+𝑟
𝑏න0
𝑡
𝑒 𝑑𝑡

Azione integrale
Esempio
38
Banda proporzionale = 20%Velocità di integrazione = 0,5 ripetizione/minApertura in condizioni normali = 50%
Determinare il grado di apertura della valvola regolatrice dopo che sono trascorsi due minuti dal momento in cui la variabile controllata ha subito una deviazione permanente dal valore desiderato pari al 3% del campo di funzionamento dello strumento.
Regolazione ad azione proporzionale più integrale
Dati:
P0 = 0,5 b = 0,2 r = 0,5 ripetizioni/min e = 0,03.
Soluzione:
Sostituendo nell’equazione e risolvendo per t=2 P = 0,80
Il grado di apertura della valvola regolatrice varia dal 50% all’ 80%.

Azione integrale
Sistema di regolazione
proporzionale più integrale
39
Regolazione ad azione proporzionale più integrale

Azione integrale
Sistema di regolazione proporzionale più integrale
40
Regolazione ad azione proporzionale più integrale
Condizioni normali 𝑃𝐼 = 𝑃𝐵 = 𝑃𝑎𝑟𝑖𝑎 𝑖𝑛 𝑢𝑠𝑐𝑖𝑡𝑎 𝑑𝑎𝑙𝑙𝑜 𝑠𝑡𝑟𝑢𝑚𝑒𝑛𝑡𝑜
I : soffietto integrale B : soffietto proporzionale
Variazione di carico deviazione della variabile dal valore desiderato allontanamento della paletta dall’ugello.
Azione del relay aumento della pressione in uscita↓
Collegamento tra I e B inizialmente interrotto il soffietto B riavvicina la paletta all’ugello Configurazione del sistema corrispondente al valore della deviazione della variabile controllata.
R = resistenza variabile con valore finito (valvola a spillo)
↑ 𝑃𝐵 passaggio graduale dell’aria a I allontanamento della paletta dall’ugello ↑ 𝑃𝐵 ↑ 𝑃𝑎𝑟𝑖𝑎 𝑖𝑛 𝑢𝑠𝑐𝑖𝑡𝑎
Ripetizione continua del ciclo ↑ 𝑃𝑎𝑟𝑖𝑎 𝑖𝑛 𝑢𝑠𝑐𝑖𝑡𝑎 continuo variazione del grado di apertura della valvola riporto della variabile controllata al valore desiderato.
𝑃𝐵 - 𝑃𝐼 ↓ gradualmente ↓ aria passante attraverso la resistenza

Azione integrale
Sistema di regolazione proporzionale più integrale
41
Regolazione ad azione proporzionale più integrale
La variabile torna a coincidere con il valore desiderato la paletta riassume la posizione originaria 𝑃𝐼 = 𝑃𝐵valvola regolatrice stabile nella nuova posizione.
Es. Pressione iniziale sulla valvola: 7 psig. 𝑃𝐼 = 𝑃𝐵 . Banda proporzionale = 30%.
Variazione di carico P’= 11 psig. Deviazione iniziale della variabile = 6%.
Variazione corrispondente della pressione in uscita dovuta all’azione proporzionale:ΔP= 0,06 / 0,3= 0,2 = 20% del campo di variazione (3-15 psig).
Escursione di 12 psig ΔP =0,2x12=2,4 psig. La pressione sulla valvola regolatrice passa da 7 a 9,4 psig. 𝑃𝐵= 9,4 psig ΔP lungo R = 9,4-7=2,4 psig.
Flusso di aria da B a I 𝑃𝐼 ↑ allontanamento della paletta dall’ugello ↑ 𝑃𝑢𝑠𝑐𝑖𝑡𝑎 ripristino 𝑃𝐼 − 𝑃𝐵

Azione integrale
Sistema di regolazione proporzionale più integrale
42
Regolazione ad azione proporzionale più integrale
Quando 𝑃𝑢𝑠𝑐𝑖𝑡𝑎=11 psig il fenomeno si arresta La valvola regolatrice ristabilisce nel processo le condizioni iniziali la variabile controllata torna a coincidere con il valore desiderato La paletta riassume la posizione iniziale davanti all’ugello 𝑃𝐼 = 𝑃𝐵 = 𝑃𝑎𝑟𝑖𝑎 𝑖𝑛 𝑢𝑠𝑐𝑖𝑡𝑎 𝑑𝑎𝑙𝑙𝑜 𝑠𝑡𝑟𝑢𝑚𝑒𝑛𝑡𝑜= 11 psig
R regola l’intensità dell’azione integrale:- Controllo della portata di un fluido↑velocità di risposta ↓ ritardi ↑ velocità di integrazione- Controllo della temperatura lenta risposta ↓ velocità di integrazione per evitare oscillazioni
Nel caso di sistemi con alti ritardi : rallentare l’azione correttiva adeguandola alla velocità di reazione del processo aumento della banda proporzionale e riduzione della velocità di integrazione la variabile ritorna molto lentamente nel valore desiderato
Se la deviazione della variabile controllata dal valore desiderato persiste (es.avviamento di un impianto) valvola regolatrice in una posizione limite il sistema cessa la regolazione segnale di uscita invariato finché l’errore non cambia segno ( la variabile passa dall’altro lato del valore desiderato)

Azione integrale
43
Regolazione ad azione proporzionale più integrale
Risposta di un processo munito di regolazione
proporzionale più integrale

Azione integrale
44
Regolazione ad azione proporzionale più integrale
Effetto della velocità di integrazioneprocessi con velocità di risposta elevata
e piccoli ritardi (controllo della portata di un fluido)
Sistemi di controllo della temperatura e altri processi a lenta risposta
(onde evitare il prodursi di oscillazioni)

Azione integrale
45
Regolazione ad azione proporzionale più integrale
Effetto dell’ampiezza della banda proporzionale

Azione integrale
46
Regolazione ad azione proporzionale più integrale
Regolazione proporzionale più integrale
indicata nei processi con:o ampie e frequenti variazioni di carico
non indicata nei processi con:o tempi morti e ritardi rilevanti

Azione derivativa
47
𝑃 = 𝑃0 +𝑚𝑑𝑒
𝑑𝑡
𝑑𝑝
𝑑𝑡= 𝑚
𝑑2𝑒
𝑑𝑡2
Nessuna azione correttivaFinchè l’errore rimane costante
Segnale di uscita sfasato 90°in anticipo rispetto al segnale di ingresso
m > 0 azione direttam < 0 azione inversa

Azione derivativa
48
Azione proporzionale più derivativa
𝑃 = 𝑃0 +𝑒
𝑏+ 𝑚
𝑑𝑒
𝑑𝑡
𝒎 =𝑞
𝑏
𝑏 = 𝑏𝑎𝑛𝑑𝑎 𝑝𝑟𝑜𝑝𝑜𝑟𝑧𝑖𝑜𝑛𝑎𝑙𝑒 𝑑𝑒𝑙𝑙𝑜 𝑠𝑡𝑟𝑢𝑚𝑒𝑛𝑡𝑜
𝒒 = 𝒕𝒆𝒎𝒑𝒐 𝒅𝒊 𝒅𝒆𝒓𝒊𝒗𝒂𝒛𝒊𝒐𝒏𝒆 (𝒓𝒂𝒕𝒆 𝒕𝒊𝒎𝒆)

Azione derivativa
49
Azione proporzionale più derivativa
𝒎 = ൗ𝑞𝑏Infatti:
𝑃 = 𝑃0 +𝑒
𝑏+
𝑞
𝑏
𝑑𝑒
𝑑𝑡
𝑟𝑒𝑔𝑜𝑙𝑎𝑧𝑖𝑜𝑛𝑒 𝑝𝑟𝑜𝑝𝑜𝑟𝑧𝑖𝑜𝑛𝑎𝑙𝑒 → 𝑃 − 𝑃0 =𝑒 (𝑡2)
𝑏𝑟𝑒𝑔𝑜𝑙𝑎𝑧𝑖𝑜𝑛𝑒 𝑝𝑟𝑜𝑝𝑜𝑟𝑧𝑖𝑜𝑛𝑎𝑙𝑒 + 𝑑𝑒𝑟𝑖𝑣𝑎𝑡𝑖𝑣𝑎 → 𝑃 − 𝑃0 =
𝑒 𝑡1𝑏
+𝑚𝑑𝑒
𝑑𝑡𝑡=𝑡1
Approssimo e (t) ad un tratto rettilineo e (t) = kt
𝑃 − 𝑃0 =𝑘 𝑡2𝑏
=𝑘 𝑡1𝑏
+ 𝑚𝑘 → 𝑚 =𝑡2 − 𝑡1𝑏
𝑚 =𝑞
𝑏𝑞 =t2-t1
q = tempo di derivazione

Azione derivativa
50
Azione proporzionale più derivativa
L’azione derivativa tende a livellare la curva secondo un andamento parallelo all’asse dei tempi.

Azione derivativa
51
Azione proporzionale più derivativa
- Variabile in allontanamento dal valore desiderato a velocità costante
Azione derivativa
Diminuzione della bandaproporzionale
dello strumento

Azione derivativa
52
Azione proporzionale più derivativa
- Variabile in avvicinamento al valore desiderato a velocità costante
Azione derivativa
Allargamento della bandaproporzionale
dello strumento

Azione derivativa
53
Azione proporzionale più derivativa
- Effetto dell’azione derivativa durante un’oscillazione completa della variabile
Banda proporzionale «fittizia»Da confrontare con quella del
Regolatore P:𝑃 − 𝑃0 = ൗ𝑒 𝑏

Azione derivativa
54
Azione proporzionale più derivativa
Azione derivativa inversa vantaggiosa nei processi con grande velocità di reazione (moto di fluidi)
vantaggi di una banda proporzionale stretta senza l’inconveniente
di avere troppe oscillazioni

Azione P.I.D
55
𝑃 = 𝑃0 +𝑒
𝑏+𝑟
𝑏න0
𝑡
𝑒 𝑑𝑡 +𝑞
𝑏
𝑑𝑒
𝑑𝑡
Datib = 30% r = 0,5 rpm q = 0,3 minP0 = 50% Δt = 1 mine = 0,06 t de/dt = 0,06
SoluzioneP = 0,5+0,2+0,05+0,06 = 0,81
Se fosse stato b=100%P = 0,5+0,06+0,015+0,018 = 0,593
Grado di apertura corrispondente a ciascuna azione

Azione P.I.D
Regolatore pneumatico
P.I.D.
56

Messa a punto dei regolatori
57
D.W. Pessen Divisione secondo il tipo di funzionamento
- per la regolazione di processi con preminente fase di avviamento:
banda proporzionale: b = 5BPp
velocità di integrazione: r = 3 ripetizioni / Pp
tempo di derivazione: q = Pp / 2
- per la regolazione di processi a funzionamento prevalentemente continuo:
banda proporzionale: b = 3BPp
velocità di integrazione: r = 2 ripetizioni / Pp
tempo di derivazione: q = Pp / 3.
Banda proporzionale corrispondente al sorgere delle oscillazioni permanenti banda proporzionale di pendolazione BPp.
Tempo impiegato dalla variabile per compiere una oscillazione completa periodo di pendolazione Pp.
Messa a punto dei regolatori
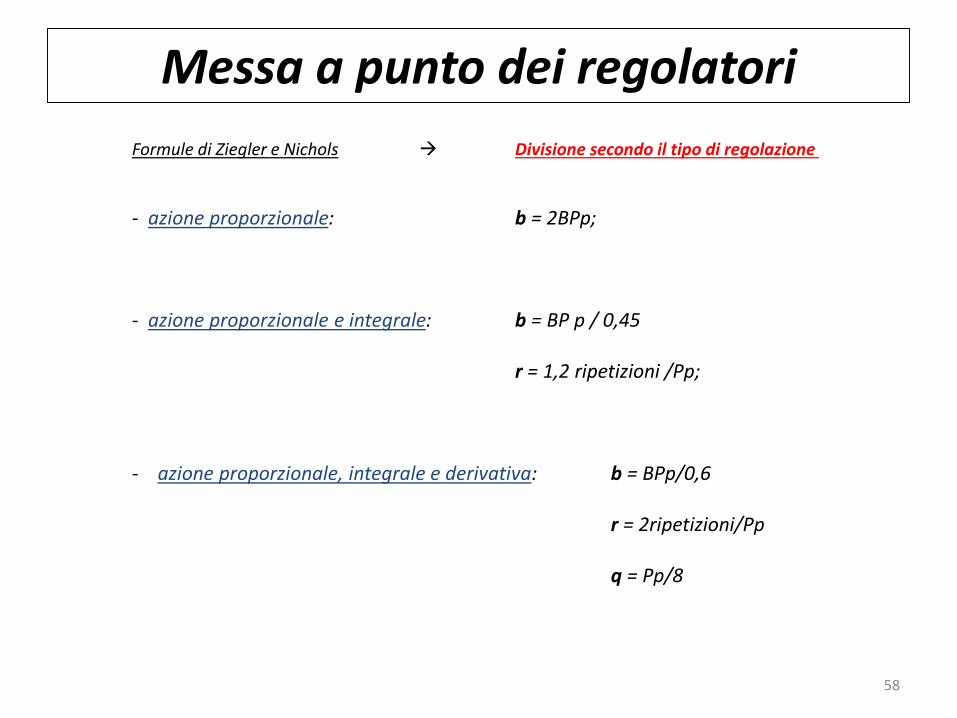
58
Formule di Ziegler e Nichols Divisione secondo il tipo di regolazione
- azione proporzionale: b = 2BPp;
- azione proporzionale e integrale: b = BP p / 0,45
r = 1,2 ripetizioni /Pp;
- azione proporzionale, integrale e derivativa: b = BPp/0,6
r = 2ripetizioni/Pp
q = Pp/8

Messa a punto dei regolatori
59
Processi con autoequilibrio, suddivisi in:
1. processi di ordine 0 2. processi di ordine 1 3. processi di ordine 2 4. processi con tempo morto5. processi di ordine superiore
Ordine del processo
ordine della eq. differenziale che descrive matematicamente la risposta transitoria.
( risposta tanto più “rallentata” quanto maggiore è l’ordine )
↑ ORDINE
Rallentamento assimilabile a tempo morto

Messa a punto dei regolatori
60
Sostituzione della risposta transitoria di un processo di ordine superiore con quella di un processo di ordine 1 con autoequilibrio e tempo morto.
Fattori caratteristici:
Vs = fattore di amplificazione
Ts = costante di tempo
Tt = tempo morto equivalente
Criterio pratico per la valutazione del grado di difficoltà della regolazione.
Tt/Ts < 1/10 regolazione del processo facile
Tt/Ts ≈ 1/6 processo sufficientemente regolabile.
Tt/Ts > 1/3 regolazione del processo difficile

Messa a punto dei regolatori
61
Metodo della curva di reazione (Ziegler – Nichols)
Curva di reazione : variazione libera del sistema (senza regolazione) ad una variazione a gradino del carico o dell’alimentazione
N = tg massima (punto di flesso)
L = ritardo (tempo morto equivalente)
A = valore della variabile all’istante in cui è stata prodotta la variazione di carico
(o di alimentazione)
∆P = variazione percentuale del carico (o del grado di apertura della valvola di alimentazione)

Messa a punto dei regolatori
62
Metodo della curva di reazione (Ziegler – Nichols)
- regolazione proporzionale: b = NL / ∆P
- regolazione proporzionale e integrale: b = 1,1 NL / ∆P
r = 0,3 / L (rpm)
-regolazione proporzionale, integrale e derivativa: b = 0,83 NL / ∆P
r = 0,5 / L (rpm)
q = 0,5 L (minuti)

Messa a punto dei regolatori
63
Metodo della curva di reazione (Ziegler – Nichols)

Sezione 4Regolazione PID (Proporzionale Integrale Derivativa), messa a punto dei regolatori, verifiche sperimentali
Prof. Ing. Cesare SaccaniProf. Ing. Augusto Bianchini
Department of Industrial Engineering (DIN) - University of BolognaViale del Risorgimento 2, 40136, Bologna – Italy
Corso di Automazione Industriale:
Modulo 2: Strumentazione e Automazione Industriale
Related Documents











