Rational Trigonometry Applied to Roboti Content Final Year Project Rational Trigonometry Applied to Robotics João Pequito Almeida

Rational Trigonometry Applied to Robotics Content Final Year Project Rational Trigonometry Applied to Robotics João Pequito Almeida.
Dec 19, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Rational Trigonometry Applied to Robotics
Content
Final Year Project
Rational Trigonometry Applied to Robotics
João Pequito Almeida

Rational Trigonometry Applied to Robotics
Content
Content
1. Introduction1.1. Definition of Rational Trigonometry 1.2. Main advantages1.3. Application examples
2. Application to Robotics2.1. Problems using standard approaches to kinematics modeling2.2. Approach using Rational Trigonometry2.2.1. Fundamental principle 2.2.2. Equations2.2.3. Application examples2.3. Conclusions, perspectives and future work
3. Questions, demonstrations
Rational Trigonometry Applied to Robotics
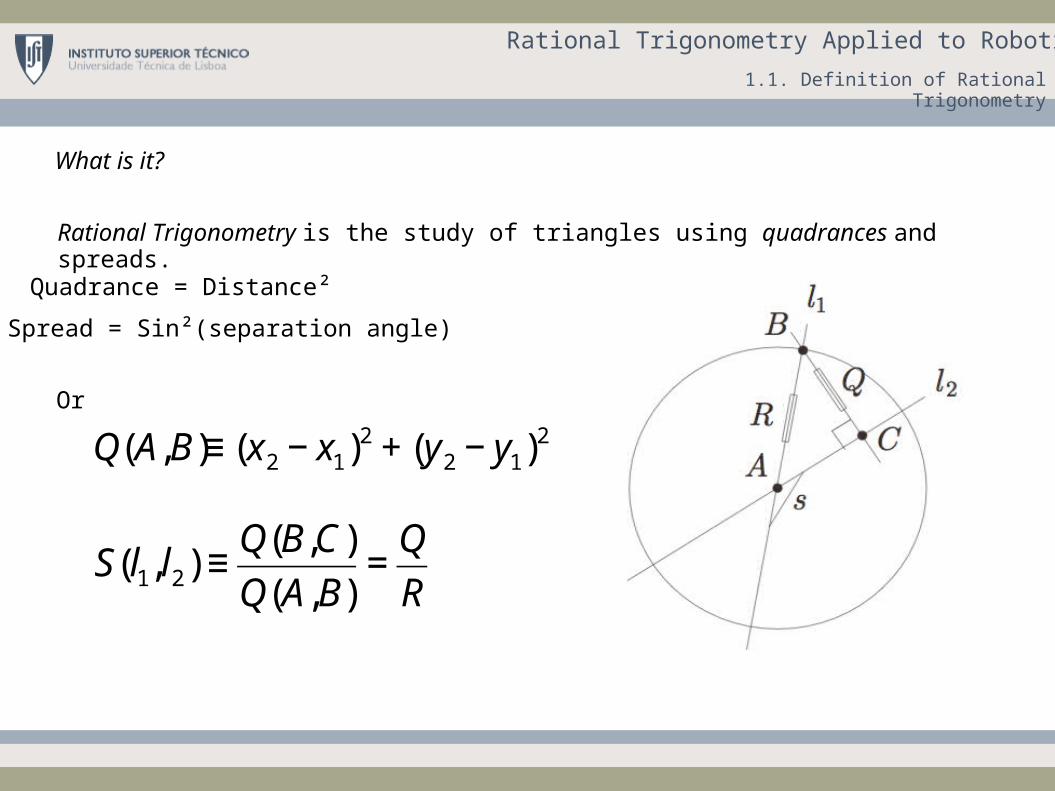
1.1. Definition of Rational Trigonometry
Rational Trigonometry is the study of triangles using quadrances and spreads.
Quadrance = Distance²
Spread = Sin²(separation angle)
What is it?
Or
€
Q(A,B)≡ (x2 − x1)2 + (y2 − y1)
2
€
S(l1, l2) ≡Q(B,C)
Q(A,B)=Q
R

Rational Trigonometry Applied to Robotics
1.2. Main advantages
1. Defines separation of lines in an unambiguous way;
2. Avoids the use of circular functions for the study of triangles;
3. Privileges an algebraic approach instead of a functional approach;
4. Allows the solving of complex geometrical problems using rational expressions;
5. Simplifies the computational implementation of geometrical problems (namely avoids
error propagation in series expansions).

Rational Trigonometry Applied to Robotics
1.3. Application examples
A simple triangle

Rational Trigonometry Applied to Robotics
2.1. Problems using other models
1. The simplicity in obtaining the solutions depends on the choice of reference frames (i.e. some choices make calculations easier than others);
2. Difficulty in applying solutions obtained for one robot to another with a different
kinematics structure, i.e., the structure of a solution is in general not kept for a different
problem
3. Difficulty in solving inverse problems – RT will be shown to provide a generic solution
to the inverse problem as a projection map between the joint space and task space
4.Forward kinematics for parallel manipulators are in general complex and usually
obtained through numeric methods.

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
By using Rational Trigonometry, a difficulty immediately comes up for rotation, better illustrated in the figure. In which of these situations is the point P defined only by its quadrance Q and spread s?
Why not use this, then, as an advantage?

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
By separating the sign and the value at stake we can have a clearer description of the point location and take advantage of the natural redundancy of an axis system with reflections (example [+x -y +z]):
Or, more generically
We can also obtain R matrices for other representations like the Euler model for rotation (ideal for attitude representation).
Line choice matrix
Reference frame matrixBase value matrix
€
P=L × R × B A new coordinate system

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
Then, using these new coordinate system (L,R,B) allows for a description of the point as a set of values:
1. A line choice matrix;
2. Reference frame matrix;
3. Base value matrix.
This notation also allows the calculation of all reflected points using just one value calculation.
Now, how to combine them to obtain a description of the motion of a set of points?

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
If we consider each solution Si as one unique tuple, then the set of all solutions can be obtained by their Cartesian Product of solutions

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
Hypothesis: generate matrices than can be combined uniquely, similarly to the Cartesian product of sets where each Tuple is one of these coordinate points (a row of the P matrix), i.e. if we take the same row of each matrix it will be a unique combination of coordinates. For that we need to repeat and swap rows, a possible solution (using some algebra “tricks”) is the following set of equations:
Coordinate selection matrix
Solutions of previous (I) and next joints (O)
The final swapped point
Counts total of combinations of coordinates from a to b
if otherwise

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
Now, how to relate these swapped points to one another? When we add Quadrances using standard addition, they give the Quadrance of the diagonal, not the Quadrance of the added distance. In order to get the actual final Quadrance we need to use a special sum operator that turns quadrances into distances and back into quadrances:
Note that these are just Quadrances converted to distances, added (thanks to the linearity of distance) and converted back to Quadrances. This allows the common sum operator to be used to combine solutions, as long as the square root is used. Note that the sign of the square root is ignored, since in this framework we use extra matrices for sign representation.
A=a2,B=b2
Where a and b are distances

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
If each Pi has all points of joint i, P* (the swapped solutions) can be added (provided that the previous rules are respected). By using swapped coordinates we can simply add them according to the robot’s structure. This exposes clearly the structure as a matrix revealing the nature of both the direct and the inverse kinematics problem:

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
Series manipulator example
As you could see in the previous equation, this model generalizes very well for any number of joints, so, as an example, the 2D hiper-redundant snake:
Reference Frame Matrices Base Matrices
Combined Reference Frame Combined Base Matrix

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
Series manipulator example
Solution with known L, (this will be the case for the most common uses as L matrices can be obtained directly from the data)

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
Parallel manipulator example (P3 is the midpoint)

Rational Trigonometry Applied to Robotics
2.2. Approach using Rational Trigonometry
The solution is similar to the series example but P3 can be obtained from P1 and P2, so, assuming P1 and P2 are determined:
Combining successive series and parallel manipulators this way is, as you can see, quite simple
Again, as known functions (2D, r have the appropriate signs):

Rational Trigonometry Applied to Robotics
2.3. Conclusions, Perspectives and Future Work
This model provides● A straightforward way to approach any robotic structures in a generic way;● An algebraic representation that allows a global perspective of the problems at hand
(e.g. the existence of redundant solutions).
Perspectives● It’s clear that using this framework the inversion of cinematic models might be
simplified for many cases and current work involves optimizing this inversion in a global way;
● Computational versions are easy to obtain and implement.
Future Work● Current plans include solving the inverse model in an optimal way (hopefully globally
optimal)● Implement a working toolbox for MatLab/Octave and/or a library for C/C++/Java● Developments available online at http://web.ist.utl.pt/ist152027/content/tfc/

?
Rational Trigonometry Applied to Robotics
3. Questions, demonstrations
?
Related Documents











