Raqunarsko upravljanje

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Raqunarsko upravljanje

Zoran M. Buqevac
Raqunarsko upravljanje
Beograd, 2007.

Sadr�aj
1 Uvod u Raqunarsko upravljanje 11.1 Vrste prenosa signala i vrste sistema upravljanja . . . . 2
1.1.1 Vremenski neprekidan prenos signala . . . . . . . . 3
1.1.2 Vremenski diskretan prenos signala . . . . . . . . . 3
1.1.3 Neprekidno diskretni prenos signala . . . . . . . . 4
1.1.4 Diskretno diskretni prenos signala . . . . . . . . . 5
1.1.5 Diskretni digitalni prenos signala . . . . . . . . . 5
1.1.6 Znaqaj diskretno digitalnog prenosa signala i Raqu-
narski upravljanih sistema . . . . . . . . . . . . . . 6
1.2 Struktura i podsistemi diskretnog digitalnog sistema
upravljanja i automatskog upravljanja . . . . . . . . . . . . . 8
1.3 Primeri raqunarskih sistema automatskog upravljanja . . 10
2 Odabiraqi, kvantovanje i kodiranje 172.1 Stvarni i idealni odabiraq . . . . . . . . . . . . . . . . . . 18
2.1.1 Prva aproksimacija rada stvarnog odabiraqa . . . 19
2.1.2 Druga aproksimacija rada stvarnog odabiraqa . . 20
2.1.3 Vrste vremenske diskretizacije . . . . . . . . . . . . 23
2.1.4 Tehniqko elektronsko izvo�enje odabiraqa i pro-
du�ivaqa . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2 Kvantovanje . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3 Kodiranje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.4 Model diskretnog digitalnog sistema automatskog upravl-
janja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3 Kompleksni i frekventni lik izlaza idealnog odabiraqa 313.1 Laplasova i Furijeova transformacija izlaznog signala
idealnog odabiraqa . . . . . . . . . . . . . . . . . . . . . . . 32
3.1.1 Prvi oblik kompleksnog i frekventnog lika izlaz-
nog signala idealnog odabiraqa . . . . . . . . . . . 32
3.1.2 Drugi oblik kompleksnog i frekventnog lika iz-
laznog signala idealnog odabiraqa . . . . . . . . . 33
3.1.3 Tre�i oblik kompleksnog i frekventnog lika izla-
znog signala idealnog odabiraqa . . . . . . . . . . . 38
3.2 Periodiqnost komplesnog lika X∗ (s) . . . . . . . . . . . . . 39
v

vi SADR�AJ
3.3 Periodiqnost frekventnog lika X∗ (jω) . . . . . . . . . . . 40
3.3.1 Pojava vixih uqestanosti u frekventnom liku X∗ (jω) 40
3.3.2 Nisko propusni priguxivaq (filter) . . . . . . . . 42
3.3.3 Xenonova teorema (Teorema odabiranja) . . . . . . 43
3.3.4 Fiziqko tumaqenje Xenonove teoreme kroz primer . 44
3.4 Jednostruko prenosni i vixestruko prenosni diskretni
sistemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4 Prenosne karakteristike diskretnog sistema 514.1 Prenosna funkcija i frekventna karakteristika jednos-
truko prenosnog diskretnog sistema . . . . . . . . . . . . . 52
4.1.1 Diskretna prenosna funkcija i diskretna frekven-
tna karakteristika otvorenog diskretnog sistema . 53
4.1.2 Prvi oblik diskretne prenosne funkcije . . . . . . 55
4.1.3 Drugi oblik diskretne prenosne funkcije . . . . . . 56
4.1.4 Tre�i oblik diskretne prenosne funkcije . . . . . 56
4.1.5 Prvi oblik diskretne frekventne karakteristike . 57
4.1.6 Drugi oblik diskretne frekventne karakteristike 57
4.1.7 Tre�i oblik diskretne frekventne karakteristike 57
4.2 Diskretna prenosna matrica i diskretna frekventna ma-
trica vixestruko prenosnog diskretnog sistema . . . . . . 58
5 Sistemi za produ�avanje trajanja signala 615.1 Sistemi za produ�avanje trajanja signala nultog reda . . 62
5.1.1 Prenosna funkcija . . . . . . . . . . . . . . . . . . . . 63
5.1.2 Frekventna karakteristika . . . . . . . . . . . . . . 64
5.2 Sistemi za produ�avanje trajanja signala prvog reda . . . 65
5.2.1 Prenosna funkcija . . . . . . . . . . . . . . . . . . . . 66
5.2.2 Frekventna karakteristika . . . . . . . . . . . . . . 70
6 Z transformacija 716.1 Definicija z kompleksnog broja . . . . . . . . . . . . . . . . 72
6.2 Preslikavanje s ravni u z ravan . . . . . . . . . . . . . . . . 73
6.2.1 Preslikavanje intervala
[− jω0
2 , jω02
]. . . . . . . . . 75
6.2.2 Preslikavanje pravih s = σ ± jω02 , σ ∈ R . . . . . . . 76
6.2.3 Preslikavanje realne ose s = σ ∈ R . . . . . . . . . . 78
6.2.4 Preslikavanje s ravni u z ravan . . . . . . . . . . . 78
6.2.5 Preslikavanje prave odre�enog vremena smirenja . 79
6.2.6 Preslikavanje prave odre�enog stepena priguxenja 80
6.3 Definicija Z transformacije . . . . . . . . . . . . . . . . . 80
6.3.1 Osobine Z transformacije . . . . . . . . . . . . . . . 83
6.3.2 Inverzna Z transformacija . . . . . . . . . . . . . . 88
6.3.3 Graniqne teoreme Z transformacije . . . . . . . . . 88
6.4 Odre�ivanje diskretnog signala na osnovu njegove Z trans-
formacije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.4.1 Primena tablice Z transformacija . . . . . . . . . 90
6.4.2 Primena inverzne transformacije . . . . . . . . . . 91

Sadr�aj vii
6.4.3 Razvijanje u stepeni red po z−1. . . . . . . . . . . . 91
6.5 Z prenosna funkcija i Z prenosna matrica . . . . . . . . . 92

viii Sadr�aj
Poglavlje 1
Uvod u Raqunarskoupravljanje
1
2 Poglavlje 1. Uvod u Raqunarsko upravljanje
1.1 Vrste prenosa signala i vrste sistema up-ravljanja
U toku rada sistema upravljanja ostvaruje se kako prenos signala izme�u
njegovih podsistema tako i obrada signala u tim podsistemima.
Sa informacijskog stanovixta podsistemi sistema upravljanja su:
1. Predajnici (odaxiljaqi) qija je uloga, kao xto i sam njihov naziv
pokazuje, da predaju (odaxiljaju) signale,
2. Kanali veza (prenosne linije, prenosnici) qija je uloga da se kroz
njih fiziqki prenose signali,
3. Prijemnici qija je uloga da primaju signale od predajnika posred-
stvom kanala veza,
4. Obradne jedinice qija je uloga da se u njima signali obra�uju i
5. Prenosni organi u kojima se ostvaruje pretvaranje signala.
Sa stanovixta njihove prirode ovi podsistemi mogu biti:
• mehaniqki,
• pneumatski,
• hidrauliqki,
• fluidiqki,
• elektriqni,
• elektronski i
• kombinovani.
U aktuelnom trenutku tehnoloxkog i tehniqkog razvoja sistemi up-
ravljanja sa njihovim podsistemima su dominantno elektriqne i elek-
tronske prirode, sa izuzetkom izvrxnih organa koji su vrlo qesto hidra-
uliqke prirode zbog njihove osobine da iako su relativno malih gabarita
mogu da ostvaruju veliku snagu.
Primer 1.1 Hidrauliqki izvrxni organi se koriste za pokretanje kormilakod brodova, zakrilaca na krilima aviona i sliqno.
Prenos signala kroz kanal veze je mogu� ako se predajnik nalazi na
vixem energetskom potencijalu u odnosu na prijemnik.

1.1. Vrste prenosa signala i vrste sistema upravljanja 3
t
x
Predajnik
0
t
x
Prijemnik
0
Kanal veze
t
0
x
Slika 1.1: Vremenski neprekidan prenos signala
1.1.1 Vremenski neprekidan prenos signala
U sluqaju stalnog odr�avanja navedene potencijalne razlike izme�u
predajnika i prijemnika i neprekinutog kanala veze ostvaruje se vre-menski neprekidan prenos signala xto ilustruje slika 1.1.
Sistemi upravljanja kod kojih se u svim kanalima veza ostvaruje vre-
menski neprekidan prenos signala su vremenski neprekidni sistemiupravljanja. Rad ovakvih sistema se posmatra na vremenskom skupu
Tn = {t : t ∈ �}
ili na povezanom podskupu ovog skupa.
1.1.2 Vremenski diskretan prenos signala
Mogu� je prenos signala kroz kanal veze samo u pojedinim trenucima
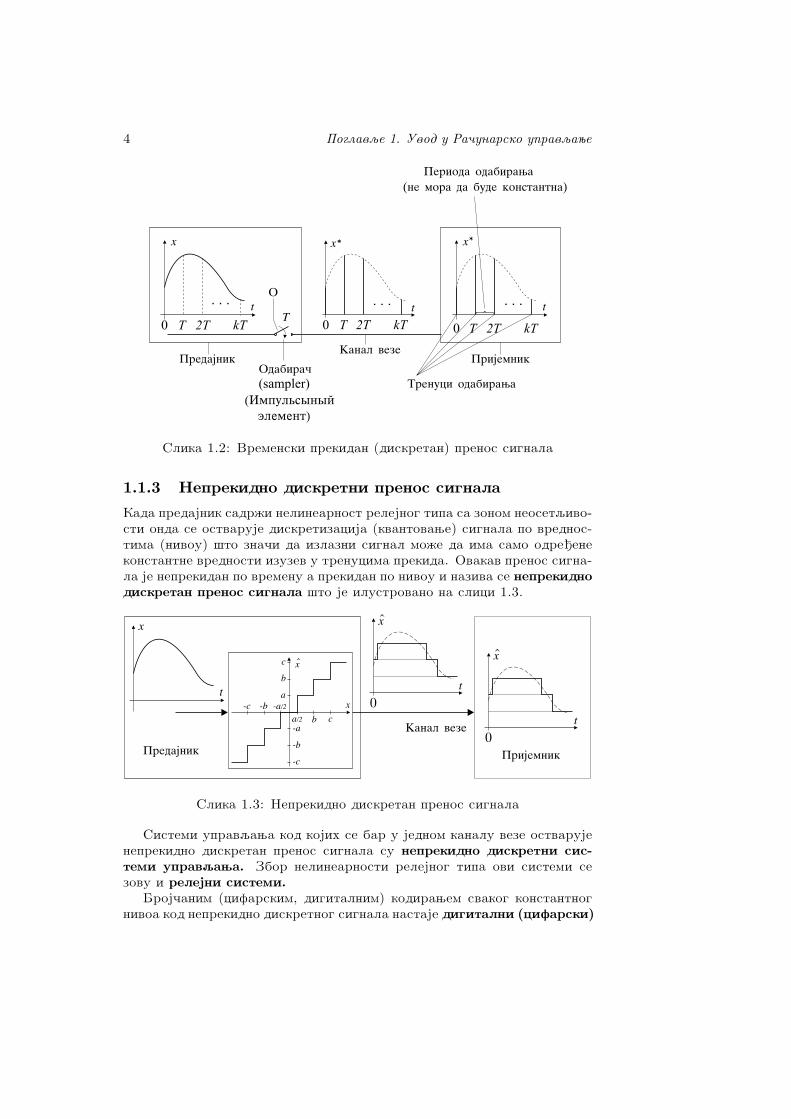
0, T, 2T, · · · , pri qemu se ostvaruje vremenski prekidan (diskretan)prenos signala. Ovakav prenos signala ilustruje slika 1.2.
Definicija 1.1 Odabiraq je automatski prekidaq koji se zatvara samou pojedinim trenucima 0, T, 2T, · · · , a u ostalim trenucima je otvoren.
Sistemi upravljanja kod kojih se bar u jednom kanalu veze ostvaruje
vremenski prekidan prenos signala je vremenski prekidan (diskretan)sistem upravljanja. Rad ovakvih sistema se posmatra na vremenskom
skupu
Td = {0, T, 2T, · · · , kT, · · · } =⇒
‘
x∗ (t) ={
x (t) ,∀t ∈ Td
0,∀t ∈ T �Td.
Oba pomenuta signala x i x∗mogu da imaju proizvoljne realne vred-
nosti. Takvi signali nazivaju se analogni signali.
4 Poglavlje 1. Uvod u Raqunarsko upravljanje
t
x
PrijemnikKanal veze
t
x
t
x
Predajnik
T0 T 2T kT 0 T 2T kT 0 T 2T kT
. . .. . . . . .
Trenuci odabirawa
Perioda odabirawa
(ne mora da bude konstantna)
Odabira~
(sampler)
(
)
��������
�� � �
O
Slika 1.2: Vremenski prekidan (diskretan) prenos signala
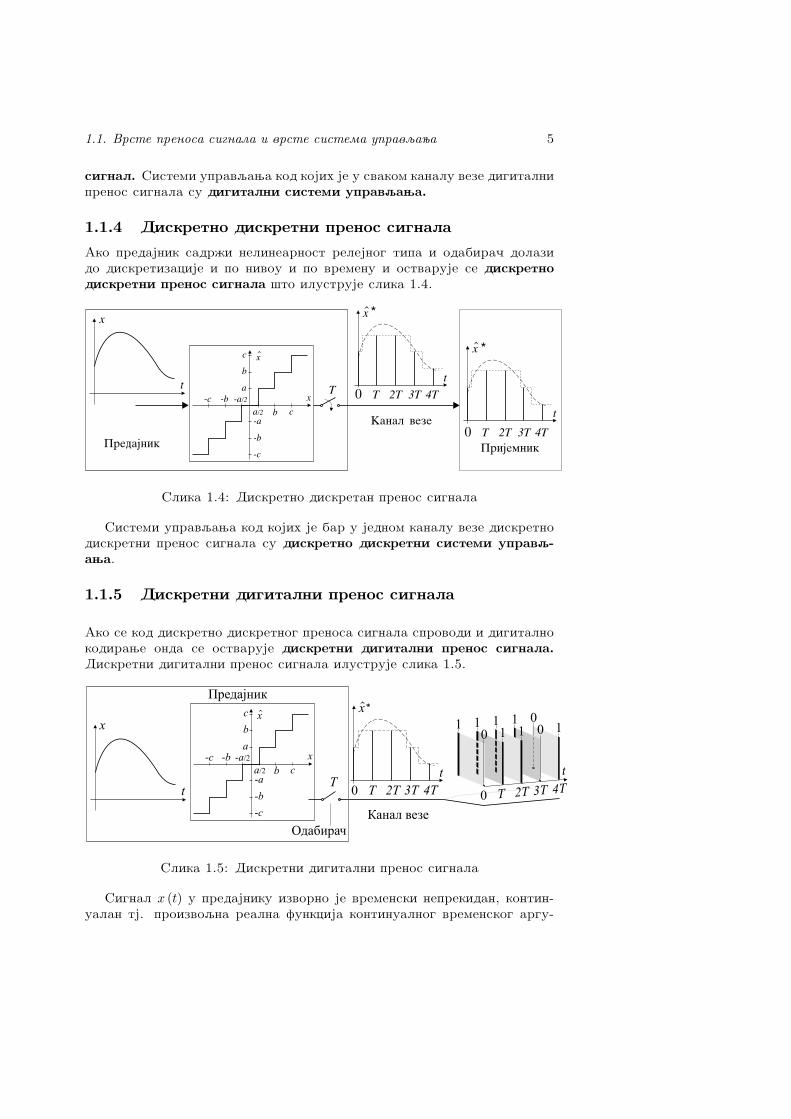
1.1.3 Neprekidno diskretni prenos signalaKada predajnik sadr�i nelinearnost relejnog tipa sa zonom neosetljivo-
sti onda se ostvaruje diskretizacija (kvantovanje) signala po vrednos-
tima (nivou) xto znaqi da izlazni signal mo�e da ima samo odre�ene
konstantne vrednosti izuzev u trenucima prekida. Ovakav prenos signa-
la je neprekidan po vremenu a prekidan po nivou i naziva se neprekidnodiskretan prenos signala xto je ilustrovano na slici 1.3.
t
x
Predajnik
a/2
-a/2
b c
a
b
c
-b-c
-a
-b
-c
x
x�
Kanal veze
t
0
x�
t
0
x�
Prijemnik
Slika 1.3: Neprekidno diskretan prenos signala
Sistemi upravljanja kod kojih se bar u jednom kanalu veze ostvaruje
neprekidno diskretan prenos signala su neprekidno diskretni sis-temi upravljanja. Zbor nelinearnosti relejnog tipa ovi sistemi se
zovu i relejni sistemi.Brojqanim (cifarskim, digitalnim) kodiranjem svakog konstantnog
nivoa kod neprekidno diskretnog signala nastaje digitalni (cifarski)
1.1. Vrste prenosa signala i vrste sistema upravljanja 5
signal. Sistemi upravljanja kod kojih je u svakom kanalu veze digitalni
prenos signala su digitalni sistemi upravljanja.
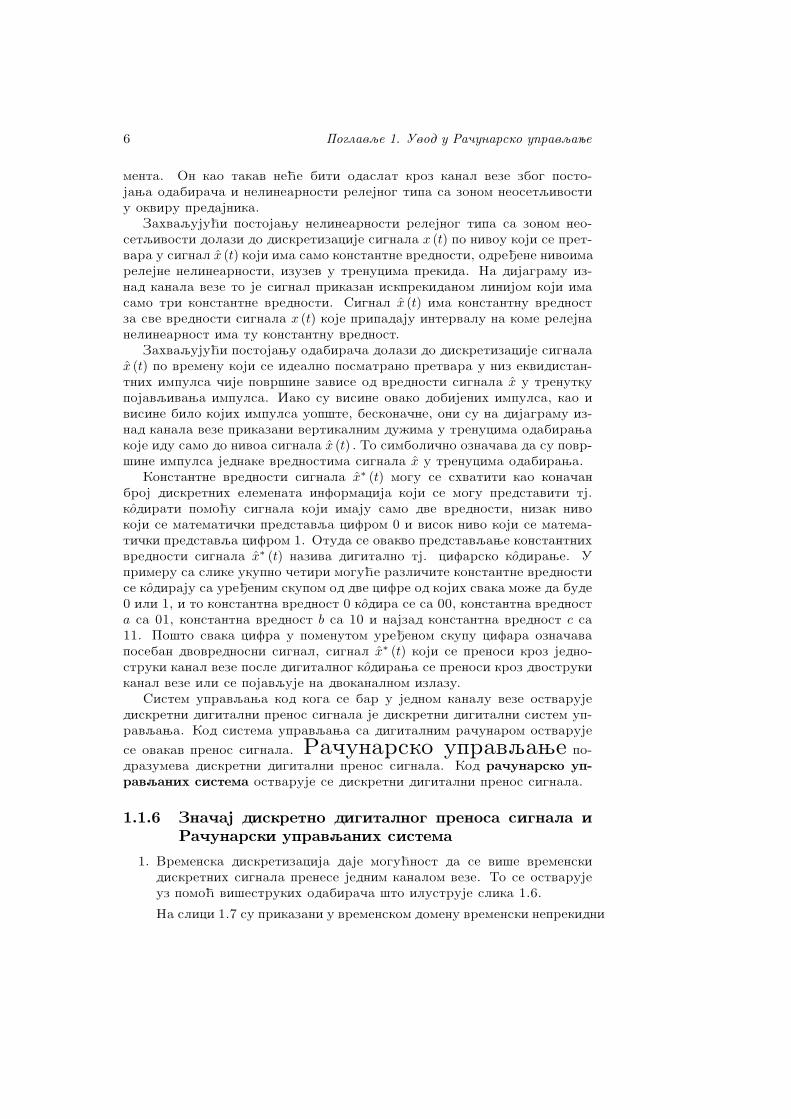
1.1.4 Diskretno diskretni prenos signalaAko predajnik sadr�i nelinearnost relejnog tipa i odabiraq dolazi
do diskretizacije i po nivou i po vremenu i ostvaruje se diskretnodiskretni prenos signala xto ilustruje slika 1.4.
t
x
Predajnik
a/2
-a/2
b c
a
b
c
-b-c
-a
-b
-c
x
x�
Kanal veze
t
x�
0 T 2T 3T 4T
*
t
x�
Prijemnik
0 T 2T 3T 4T
*
T
Slika 1.4: Diskretno diskretan prenos signala
Sistemi upravljanja kod kojih je bar u jednom kanalu veze diskretno
diskretni prenos signala su diskretno diskretni sistemi upravlj-anja.
1.1.5 Diskretni digitalni prenos signala
Ako se kod diskretno diskretnog prenosa signala sprovodi i digitalno
kodiranje onda se ostvaruje diskretni digitalni prenos signala.Diskretni digitalni prenos signala ilustruje slika 1.5.
Slika 1.5: Diskretni digitalni prenos signala
Signal x (t) u predajniku izvorno je vremenski neprekidan, kontin-
ualan tj. proizvoljna realna funkcija kontinualnog vremenskog argu-
6 Poglavlje 1. Uvod u Raqunarsko upravljanje
menta. On kao takav ne�e biti odaslat kroz kanal veze zbog posto-
janja odabiraqa i nelinearnosti relejnog tipa sa zonom neosetljivosti
u okviru predajnika.
Zahvaljuju�i postojanju nelinearnosti relejnog tipa sa zonom neo-
setljivosti dolazi do diskretizacije signala x (t) po nivou koji se pret-
vara u signal x (t) koji ima samo konstantne vrednosti, odre�ene nivoima
relejne nelinearnosti, izuzev u trenucima prekida. Na dijagramu iz-
nad kanala veze to je signal prikazan iskprekidanom linijom koji ima
samo tri konstantne vrednosti. Signal x (t) ima konstantnu vrednost
za sve vrednosti signala x (t) koje pripadaju intervalu na kome relejna
nelinearnost ima tu konstantnu vrednost.
Zahvaljuju�i postojanju odabiraqa dolazi do diskretizacije signala
x (t) po vremenu koji se idealno posmatrano pretvara u niz ekvidistan-
tnih impulsa qije povrxine zavise od vrednosti signala x u trenutku
pojavljivanja impulsa. Iako su visine ovako dobijenih impulsa, kao i
visine bilo kojih impulsa uopxte, beskonaqne, oni su na dijagramu iz-
nad kanala veze prikazani vertikalnim du�ima u trenucima odabiranja
koje idu samo do nivoa signala x (t) . To simboliqno oznaqava da su povr-
xine impulsa jednake vrednostima signala x u trenucima odabiranja.
Konstantne vrednosti signala x∗ (t) mogu se shvatiti kao konaqan
broj diskretnih elemenata informacija koji se mogu predstaviti tj.
kodirati pomo�u signala koji imaju samo dve vrednosti, nizak nivo
koji se matematiqki predstavlja cifrom 0 i visok nivo koji se matema-
tiqki predstavlja cifrom 1. Otuda se ovakvo predstavljanje konstantnih
vrednosti signala x∗ (t) naziva digitalno tj. cifarsko kodiranje. U
primeru sa slike ukupno qetiri mogu�e razliqite konstantne vrednosti
se kodiraju sa ure�enim skupom od dve cifre od kojih svaka mo�e da bude
0 ili 1, i to konstantna vrednost 0 kodira se sa 00, konstantna vrednost
a sa 01, konstantna vrednost b sa 10 i najzad konstantna vrednost c sa
11. Poxto svaka cifra u pomenutom ure�enom skupu cifara oznaqava
poseban dvovrednosni signal, signal x∗ (t) koji se prenosi kroz jedno-
struki kanal veze posle digitalnog kodiranja se prenosi kroz dvostruki
kanal veze ili se pojavljuje na dvokanalnom izlazu.
Sistem upravljanja kod koga se bar u jednom kanalu veze ostvaruje
diskretni digitalni prenos signala je diskretni digitalni sistem up-
ravljanja. Kod sistema upravljanja sa digitalnim raqunarom ostvaruje
se ovakav prenos signala. Raqunarsko upravljanje po-
drazumeva diskretni digitalni prenos signala. Kod raqunarsko up-ravljanih sistema ostvaruje se diskretni digitalni prenos signala.
1.1.6 Znaqaj diskretno digitalnog prenosa signala iRaqunarski upravljanih sistema
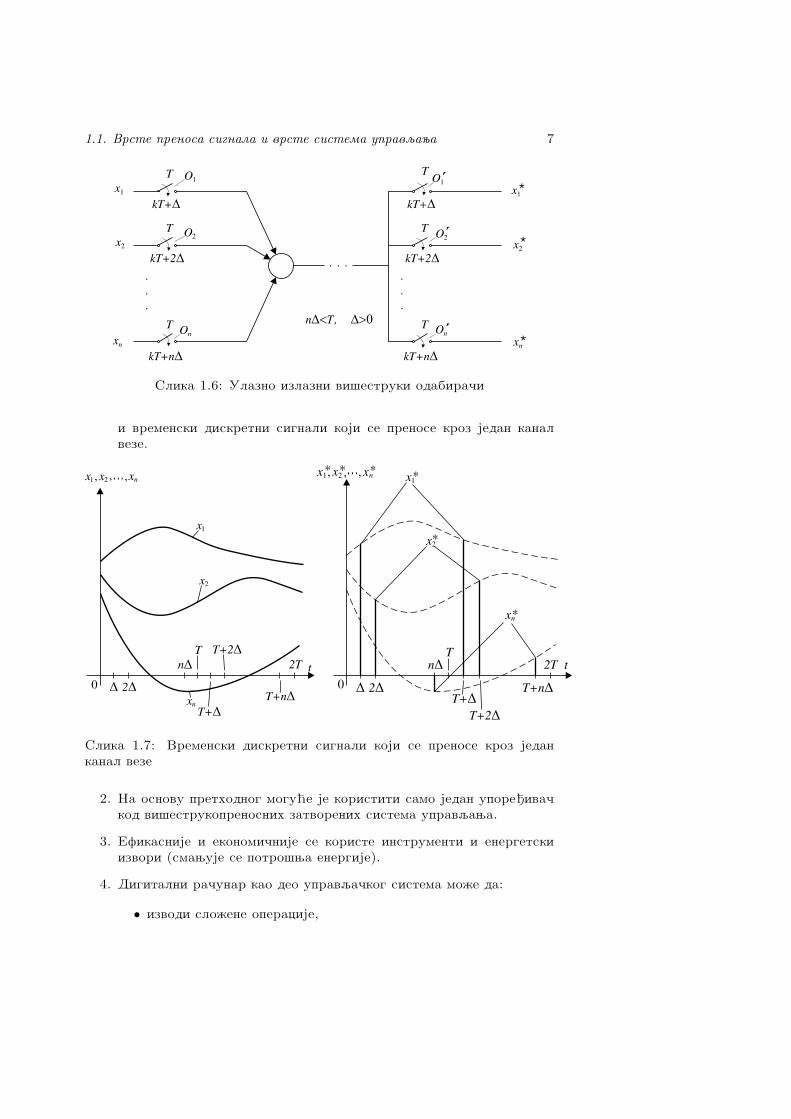
1. Vremenska diskretizacija daje mogu�nost da se vixe vremenski
diskretnih signala prenese jednim kanalom veze. To se ostvaruje
uz pomo� vixestrukih odabiraqa xto ilustruje slika 1.6.
Na slici 1.7 su prikazani u vremenskom domenu vremenski neprekidni
1.1. Vrste prenosa signala i vrste sistema upravljanja 7
. . .
T
T
T
x1
xn
x2
kT+�
kT+2�
kT+n�
.
.
.
1O
nO
2O
T
T
T
kT+�
kT+2�
kT+n�
.
.
.
x1*
x2*
xn*
2O $
nO $
1O $
n T,�� ���
Slika 1.6: Ulazno izlazni vixestruki odabiraqi
i vremenski diskretni signali koji se prenose kroz jedan kanal
veze.
x1
xn
x2
2T
T
�
T+�
2�
T+2�
n�
T+n�
0
t
x1 xnx2, , ,...
2T
T
�T+�
2�
T+2�
n�
T+n�0
t
, ,...,x1*
x1*x2*
x2*
xn*
xn*
Slika 1.7: Vremenski diskretni signali koji se prenose kroz jedan
kanal veze
2. Na osnovu prethodnog mogu�e je koristiti samo jedan upore�ivaq
kod vixestrukoprenosnih zatvorenih sistema upravljanja.
3. Efikasnije i ekonomiqnije se koriste instrumenti i energetski
izvori (smanjuje se potroxnja energije).
4. Digitalni raqunar kao deo upravljaqkog sistema mo�e da:
• izvodi slo�ene operacije,

8 Poglavlje 1. Uvod u Raqunarsko upravljanje
• obra�uje brzo i taqno veliki broj podataka,
• donosi brze i pravilne odluke u skladu sa odre�enim algo-
ritmima,
• ostvaruje pravilno i pravovremeno upravljanje,
• posti�e visoku taqnost obrade signala,
• prilago�ava se u promeni algoritma,
• realizuje slo�ene ali vrlo efikasne algoritme upravljanja,
• realizuje algoritme koji se ne mogu ostvariti analognim prenos-
nim organima.
1.2 Struktura i podsistemi diskretnog digi-talnog sistema upravljanja i automatskogupravljanja
Mada u opxtem sluqaju diskretni digitalni sistem upravljanja i auto-
matskog upravljanja ne mora da bude sa digitalnim raqunarom u u�em
smislu ve� mo�e da bude i sa specijalnim digitalnim ure�ajem qija je
priroda jednaka prirodi digitalnog raqunara ovde se diskretni digi-
talni sistem upravljanja i automatskog upravljanja poistove�uje sa sis-
temom upravljanja i automatskog upravljanja sa digitalnim raqunarom.
Digitalni raqunar je deo upravljaqkog sistema i ima ulogu korek-
cionog organa upravljaqkog sistema, gde se ostvaruje algoritam upravlja-
nja, zadavaqa gde se zadaje �eljeni izlaz i upore�ivaqa gde se porede sig-
nali o �eljenom i stvarnom izlazu. Ostali delovi upravljaqkog sistema
kod ovih sistema, kao xto su izvrxni organi, davaqi stvarnih vred-
nosti izlaza ili poreme�aja, su obiqno po svojoj prirodi razliqiti od
prirode digitalnog raqunara, tj. oni su vremenski neprekidni podsis-
temi. Radi jednostavnosti, kod ovih sistema upravljanja i automatskog
upravljanja, digitalni raqunar se poistove�uje s upravljaqkim siste-
mom. Na slikama 1.8, 1.9, 1.10 i 1.11 prikazani su strukturni dijagrami
otvorenog, otvorenog s direktnom kompenzacijom poreme�aja, zatvorenog
i kombinovanog diskretno digitalnog sistema upravljanja i automatskog
upravljanja.
R
uxi� xi
Ouxi� xi
R ^ O
v
Slika 1.8: Strukturni dijagram otvorenog diskretnog digitalnog sis-
tema upravljanja i automatskog upravljanja bez direktne kompenzacije
poreme�aja
Na prikazanim strukturnim dijagramima korix�ene su oznake koje se
inaqe koriste kod sistema upravljanja i automatskog upravljanja izuzev
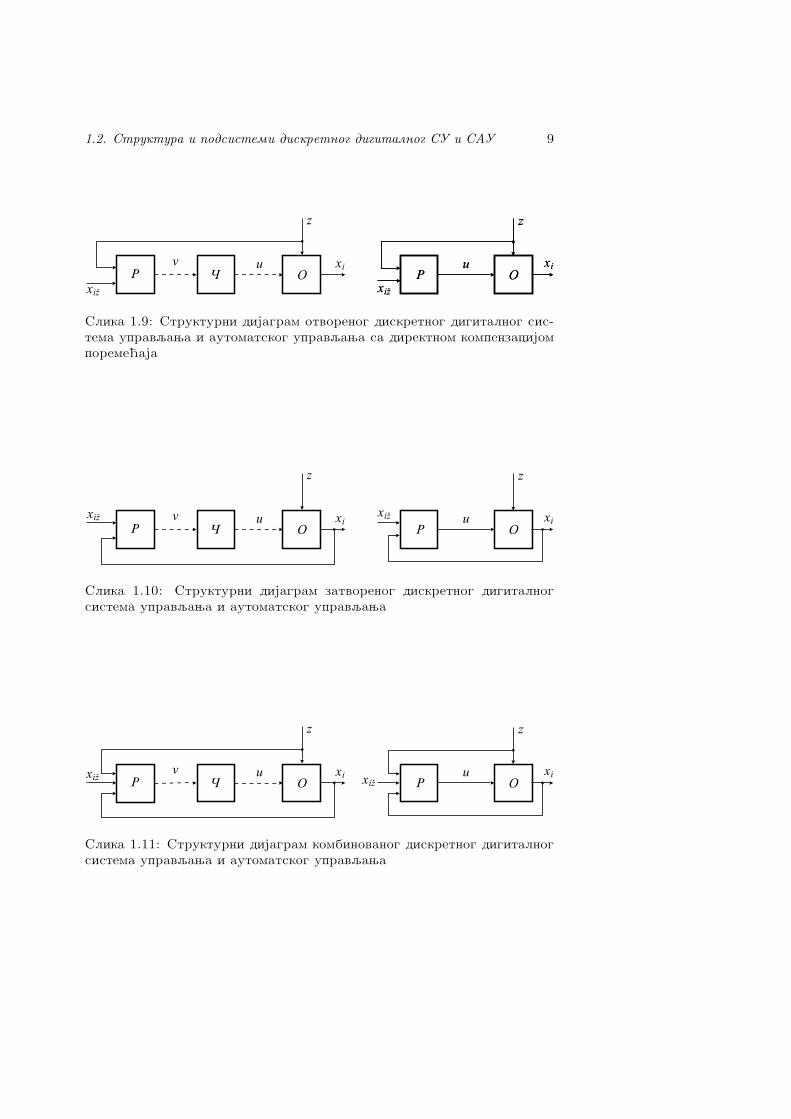
1.2. Struktura i podsistemi diskretnog digitalnog SU i SAU 9
R Ou
xi�
xi
z
Ou
xi�
xi
R ^
v
R Ou
xi�
xi
zz
Slika 1.9: Strukturni dijagram otvorenog diskretnog digitalnog sis-
tema upravljanja i automatskog upravljanja sa direktnom kompenzacijom
poreme�aja
Ou
xi� xi
R ^
v
R Ou
xi� xi
zz
Slika 1.10: Strukturni dijagram zatvorenog diskretnog digitalnog
sistema upravljanja i automatskog upravljanja
Ouxi�
xi
R ^
v
R Ou
xi�
xi
zz
Slika 1.11: Strukturni dijagram kombinovanog diskretnog digitalnog
sistema upravljanja i automatskog upravljanja
10 Poglavlje 1. Uvod u Raqunarsko upravljanje
oznake R i Q koja pretstavlja digitalni raqunar i qoveka. Navedeni
strukturni dijagrami formalno se ne razlikuju od strukturnih dija-
grama navedenih tipova sistema upravljanja i automatskog upravljanja
uopxte. Jedina razlika je xto kod ovde razmatranih sistema digitalni
raqunar ima ulogu upravljaqkog sistema.
Digitalni raqunar, kao xto je ve� napomenuto u odeljku 1.3, dras-
tiqno se po svojoj prirodi razlikuje od ostalih delova sistema. Da
bi se omogu�io nesmetan protok signala koji su u razliqitim delovima
sistema potpuno razliqiti po svojoj prirodi, neophodno je da kod ova-
kvih sistema postoje pretvaraqi signala. U samom digitalnom raqu-
naru su prisutni digitalni signali i on operixe samo sa takvim sig-
nalima, dok su u ostalim delovima sistema zastupljeni analogni sig-
nali. Zato je potrebno analogne signale pre njihovog ulaska u raqunar
pretvoriti u digitalne signale. To se ostvaruje pomo�u analogno dig-
italnih pretvaraqa koji se oznaqavaju sa A/D. Digitalni signali koji
izlaze iz raqunara, da bi mogli da se prenesu u druge analogne pod-
sisteme, moraju biti pretvoreni u analogne signale. To se ostvaruje
pomo�u digitalno analognih pretvaraqa koji se oznaqavaju sa D/A. A/Di D/A pretvaraqi, pored digitalnog raqunara, su podsistemi diskret-
nih digitalnih sistema upravljanja i automatskog upravljanja, po kojima
se oni razlikuju od ostalih sistema upravljanja i automatskog upravl-
janja. Ostali podsistemi su isti kao kod sistema upravljanja i automat-
skog upravljanja uopxte. Na strukturnim dijagramima prikazanim na
slikama 1.8, 1.9, 1.10 i 1.11 A/D i D/A pretvaraqi nisu eksplicitno
prikazani, ve� se podrazumeva da su oni sastavni deo digitalnog raqu-
nara. To odgovara i qinjeniqnom stanju u praksi, jer su A/D i D/Apretvaraqi fiziqki realizovani pomo�u tzv. ADDA elektronske karte,
koja se inaqe smexta u digitalni raqunar.
1.3 Primeri raqunarskih sistema automatskogupravljanja
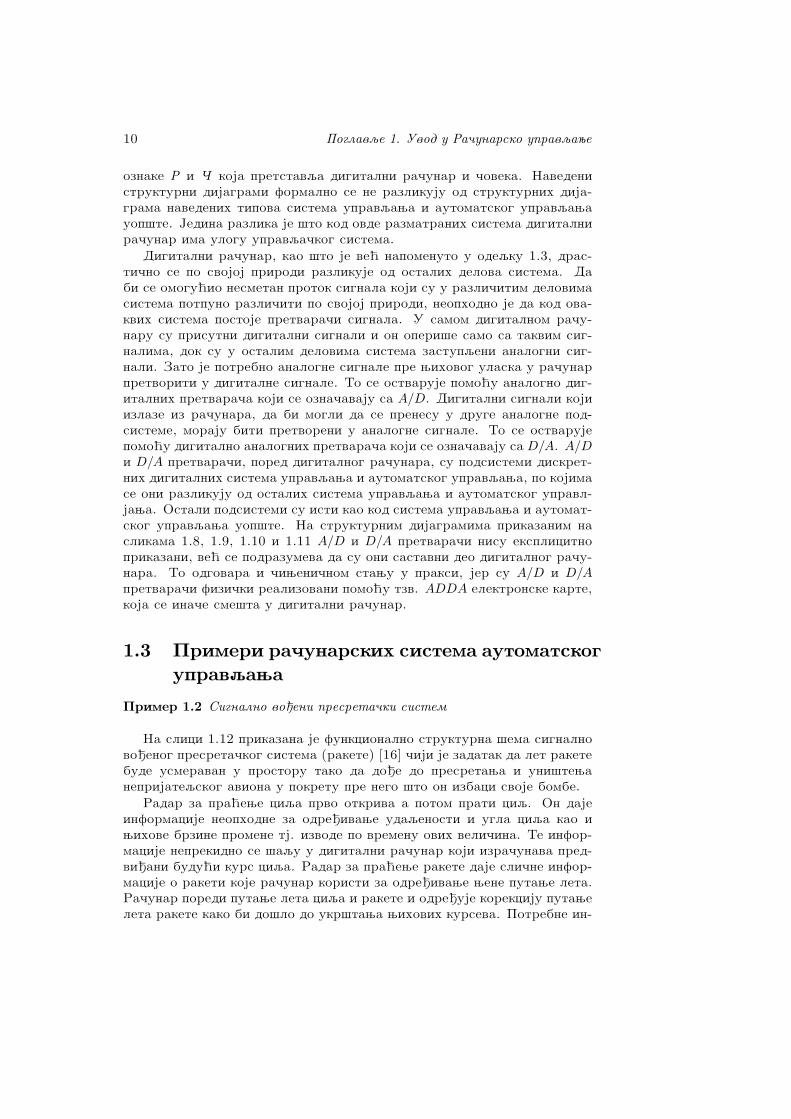
Primer 1.2 Signalno vo�eni presretaqki sistem
Na slici 1.12 prikazana je funkcionalno strukturna xema signalno
vo�enog presretaqkog sistema (rakete) [16] qiji je zadatak da let rakete
bude usmeravan u prostoru tako da do�e do presretanja i unixtenja
neprijateljskog aviona u pokretu pre nego xto on izbaci svoje bombe.
Radar za pra�enje cilja prvo otkriva a potom prati cilj. On daje
informacije neophodne za odre�ivanje udaljenosti i ugla cilja kao i
njihove brzine promene tj. izvode po vremenu ovih veliqina. Te infor-
macije neprekidno se xalju u digitalni raqunar koji izraqunava pred-
vi�ani budu�i kurs cilja. Radar za pra�enje rakete daje sliqne infor-
macije o raketi koje raqunar koristi za odre�ivanje njene putanje leta.
Raqunar poredi putanje leta cilja i rakete i odre�uje korekciju putanje
leta rakete kako bi doxlo do ukrxtanja njihovih kurseva. Potrebne in-
1.3. Primeri raqunarskih sistema automatskog upravljanja 11
Slika 1.12: Funkcionalno strukturna xema signalno vo�enog presre-
taqkog sistema
formacije o korekciji leta putanje rakoete prenose se do nje putem ra-
dio signalne veze. Ove informacije o grexci putanje leta neophodne za
njenu korekciju koristi upravljaqki sistem rakete. Upravljaqki sistem
rakete pretvara signal grexke u pomeranje aerodinamiqkih upravlja-
qkih povrxina uz pomo� izvrxnog organa. Raketa odgovara na polo�aj
aerodinamiqkih upravljaqkih povrxina i zauzima propisanu putanju
leta koja treba da dovede do sudara sa ciljem. Pra�enje cilja na moni-
toru je neprekidno tako da se promena kursa rakete sprovodi sve do
taqke sudara.
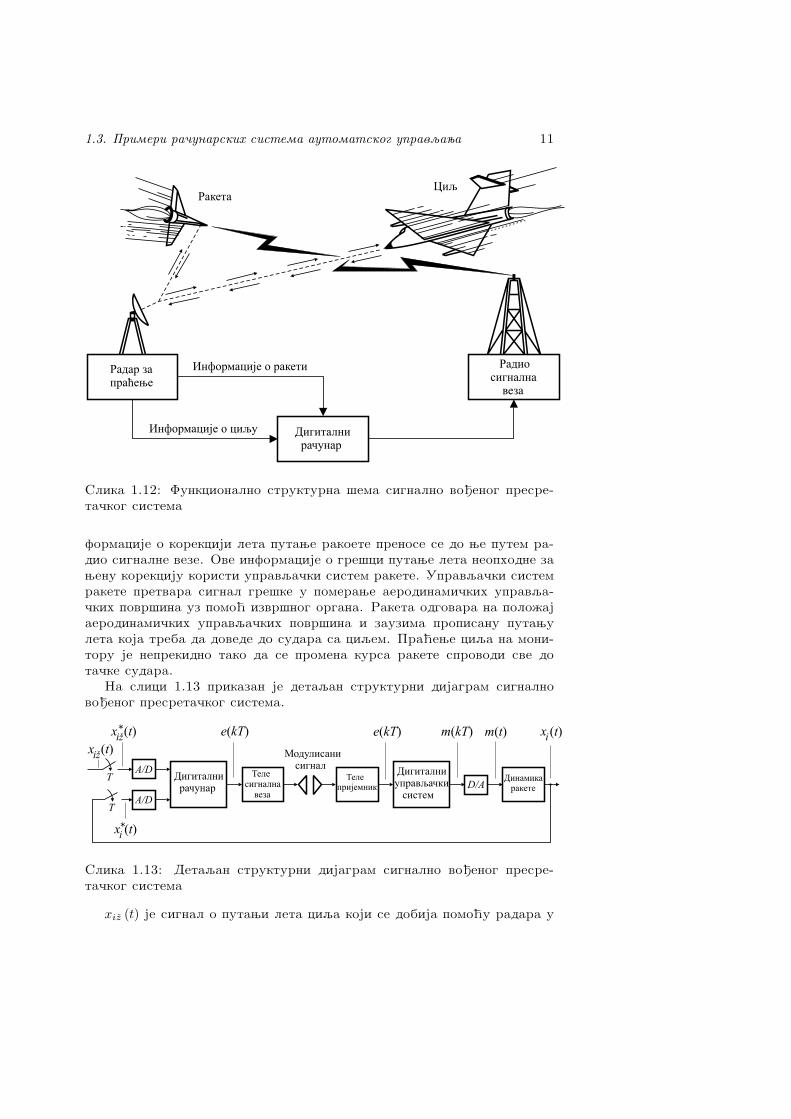
Na slici 1.13 prikazan je detaljan strukturni dijagram signalno
vo�enog presretaqkog sistema.
Slika 1.13: Detaljan strukturni dijagram signalno vo�enog presre-
taqkog sistema
xiz (t) je signal o putanji leta cilja koji se dobija pomo�u radara u
12 Poglavlje 1. Uvod u Raqunarsko upravljanje
vidu vremenski diskretizovanog signala x∗iz (t). Ovaj signal ima ulogu
signala o �eljenom izlazu. xi (t) je signal o putanji leta rakete koji
se dobija tako�e pomo�u radara u vidu vremenski diskretizovanog sig-
nala x∗i (t). Ovaj signal ima ulogu signala o stvarnom izlazu. Oba
pomenuta signala se uvode u digitalni raqunar. Imaju�i u vidu da
je digitalni raqunar ure�aj koji operixe samo sa digitalnim signal-
ima a da su x∗iz (t) i x∗
i (t) analogni signali, koji su po svojoj prirodi
potpuno razliqiti od digitalnih signala, neophodno ih je pre uvo�enja
u digitalni raqunar petvoriti u digitalne signale pomo�u analogno
digitalnih pretvaraqa. Analogno digitalni pretvaraqi su na ovom
strukturnom dijagramu oznaqeni sa A/D. Digitalni raqunar izraqu-
nava signal grexke e (kT ) = xiz (kT )−xi (kT ) koji se radio vezom prenosi
do dela upravljaqkog sistema koji se nalazi u raketi i koji je tako�e
digitalnog tipa. U digitalnom upravljaqkom sistemu koji je smexten
u raketi signal grexke se obra�uje po odre�enom algoritmu i dobija
se digitalni signal m (kT ) koji se mora pretvoriti u analogni signal
m (t) da bi se moglo pomo�u njega delovati na analogne izvrxne organe.
Ovo pretvaranje se ostvaruje pomo�u digitalno analognog pretvaraqa
koji je na slici 1.13 oznaqen sa D/A. Najzad izvrxni organi pokre�u
aerodinamiqke upravljaqke povrxine koje usmeravaju raketu ka pokret-
nom cilju radi njegovog presretanja i unixtenja.
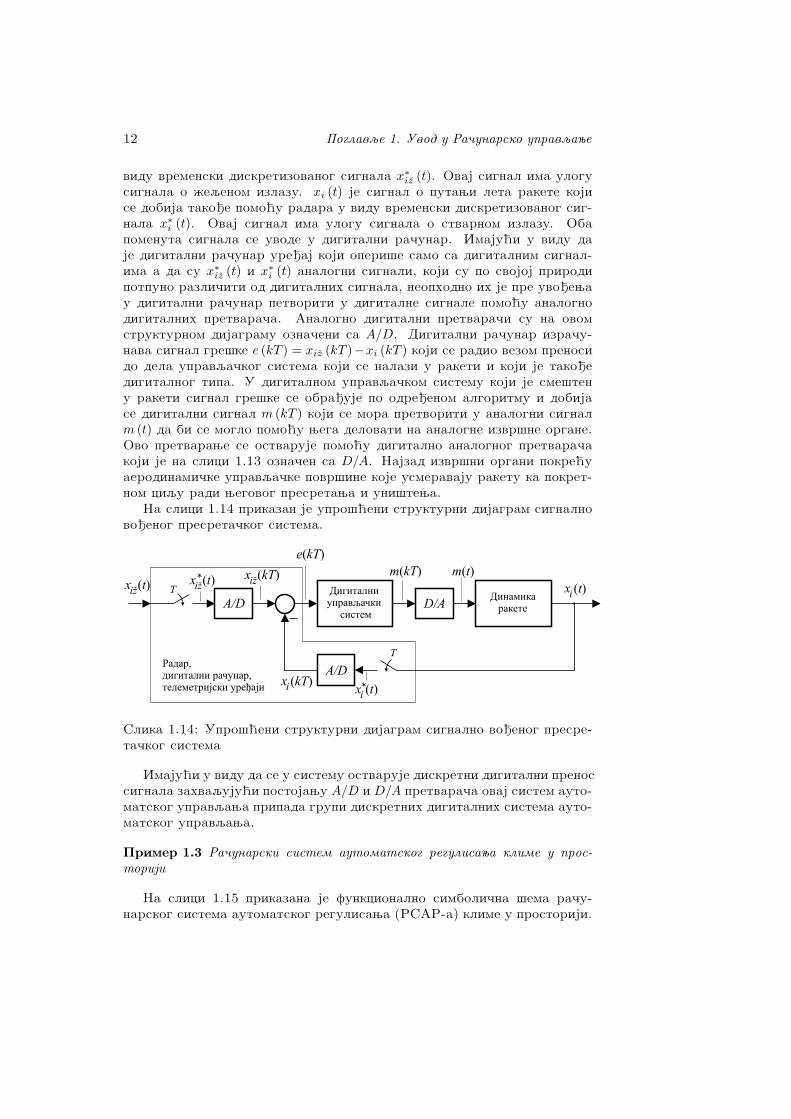
Na slici 1.14 prikazan je uprox�eni strukturni dijagram signalno
vo�enog presretaqkog sistema.
Slika 1.14: Uprox�eni strukturni dijagram signalno vo�enog presre-
taqkog sistema
Imaju�i u vidu da se u sistemu ostvaruje diskretni digitalni prenos
signala zahvaljuju�i postojanju A/D i D/A pretvaraqa ovaj sistem auto-
matskog upravljanja pripada grupi diskretnih digitalnih sistema auto-
matskog upravljanja.
Primer 1.3 Raqunarski sistem automatskog regulisanja klime u pros-toriji
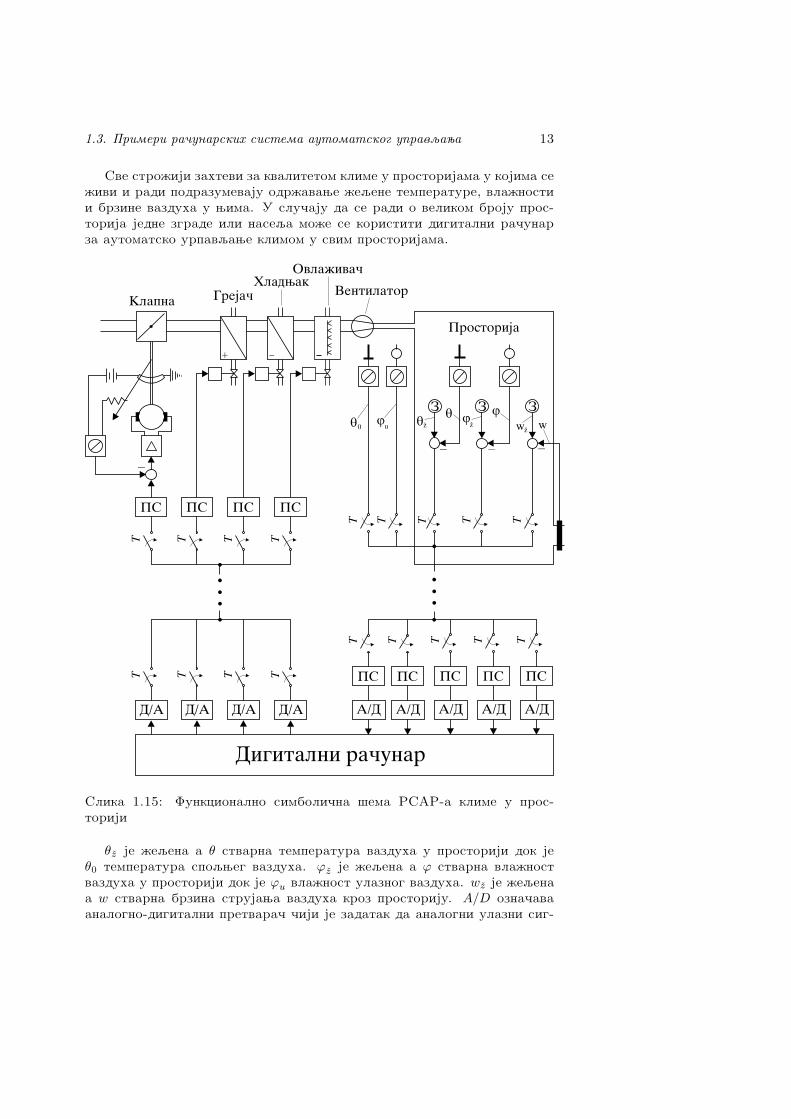
Na slici 1.15 prikazana je funkcionalno simboliqna xema raqu-
narskog sistema automatskog regulisanja (RSAR-a) klime u prostoriji.
1.3. Primeri raqunarskih sistema automatskog upravljanja 13
Sve stro�iji zahtevi za kvalitetom klime u prostorijama u kojima se
�ivi i radi podrazumevaju odr�avanje �eljene temperature, vla�nosti
i brzine vazduha u njima. U sluqaju da se radi o velikom broju pros-
torija jedne zgrade ili naselja mo�e se koristiti digitalni raqunar
za automatsko urpavljanje klimom u svim prostorijama.
–
Ovla`iva~
Prostorija
D/A
T
D/A
T
D/A
T
D/A
T
T
Greja~
+
PS
T
Hladwak
–
PS
T
PS
T
T
A/D
PS
T
A/D
PS
T
A/D
PS
...
T
A/D
PS
.
T
A/D
PS
.
.
...
Digitalni ra~unar
Klapna
–
PS
T
�0
Z
–
T
.
��z
L
T
�u
Z
T
�z
L
–
�w
–
Z
T
wz
L
Ventilator
Slika 1.15: Funkcionalno simboliqna xema RSAR-a klime u pros-
toriji
θz je �eljena a θ stvarna temperatura vazduha u prostoriji dok je
θ0 temperatura spoljnjeg vazduha. ϕz je �eljena a ϕ stvarna vla�nost
vazduha u prostoriji dok je ϕu vla�nost ulaznog vazduha. wz je �eljena
a w stvarna brzina strujanja vazduha kroz prostoriju. A/D oznaqava
analogno-digitalni pretvaraq qiji je zadatak da analogni ulazni sig-
14 Poglavlje 1. Uvod u Raqunarsko upravljanje
nal pretvori u digitalni izlazni. D/A oznaqava digitalno-analogni
pretvaraq qiji je zadatak da digitalni ulazni signal pretvori u analo-
gni izlazni. PS oznaqava produ�ivaq trajanja signala qiji je za-
datak da prima izlazni signal odabiraqa u trenutku odabiranja i da
ga prenosi na svoj izlaz u tom trenutku i u svim drugim trenucima do
narednog trenutka odabiranja.
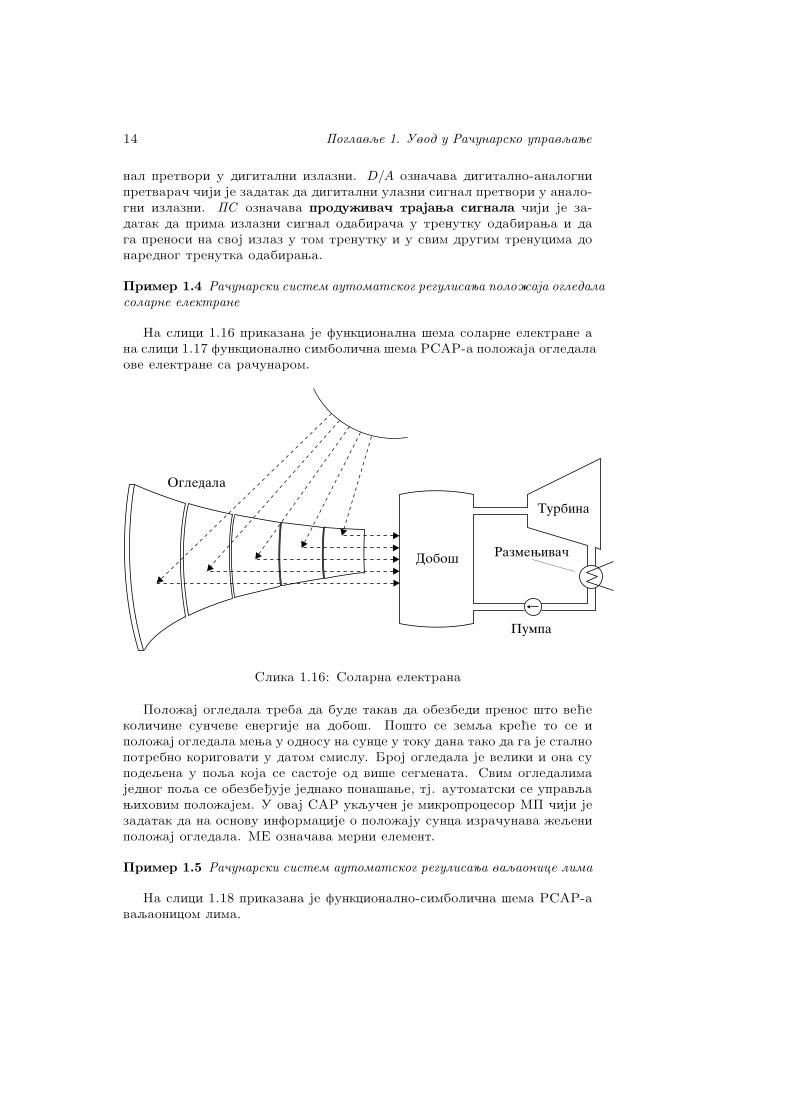
Primer 1.4 Raqunarski sistem automatskog regulisanja polo�aja ogledalasolarne elektrane
Na slici 1.16 prikazana je funkcionalna xema solarne elektrane a
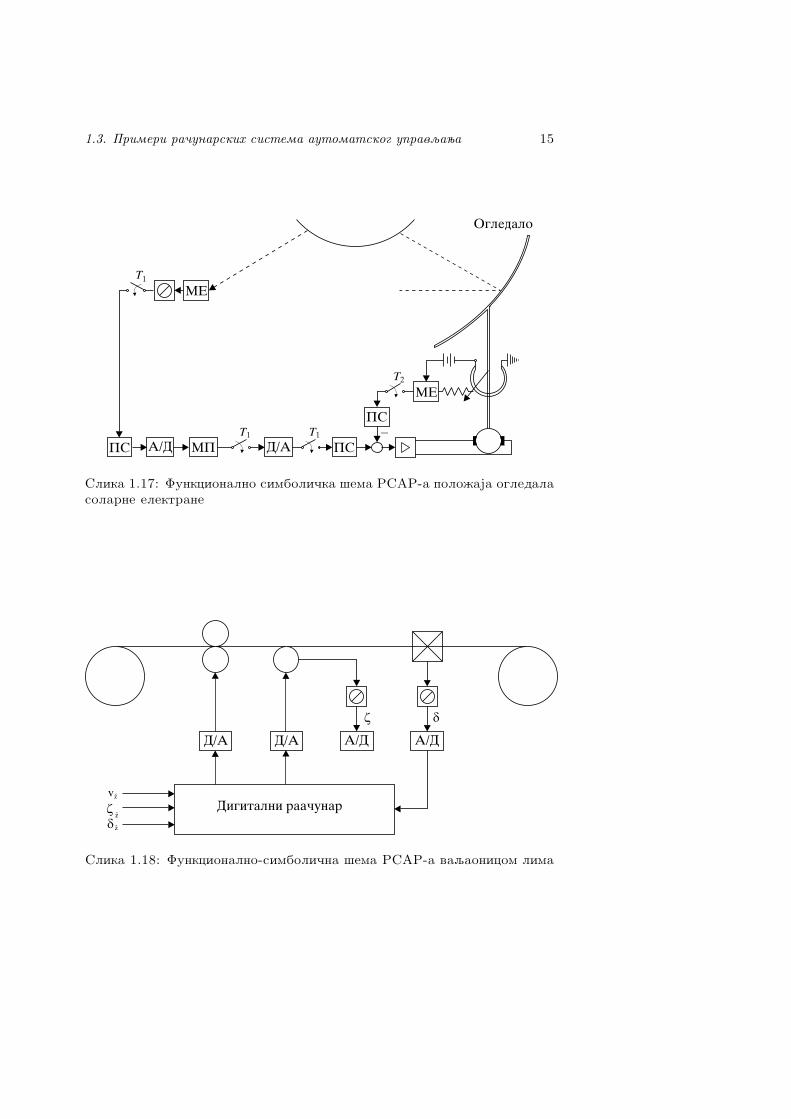
na slici 1.17 funkcionalno simboliqna xema RSAR-a polo�aja ogledala
ove elektrane sa raqunarom.
Ogledala
Dobo{
Turbina
Razmewiva~
Pumpa
Slika 1.16: Solarna elektrana
Polo�aj ogledala treba da bude takav da obezbedi prenos xto ve�e
koliqine sunqeve energije na dobox. Poxto se zemlja kre�e to se i
polo�aj ogledala menja u odnosu na sunce u toku dana tako da ga je stalno
potrebno korigovati u datom smislu. Broj ogledala je veliki i ona su
podeljena u polja koja se sastoje od vixe segmenata. Svim ogledalima
jednog polja se obezbe�uje jednako ponaxanje, tj. automatski se upravlja
njihovim polo�ajem. U ovaj SAR ukljuqen je mikroprocesor MP qiji je
zadatak da na osnovu informacije o polo�aju sunca izraqunava �eljeni
polo�aj ogledala. ME oznaqava merni element.
Primer 1.5 Raqunarski sistem automatskog regulisanja valjaonice lima
Na slici 1.18 prikazana je funkcionalno-simboliqna xema RSAR-a
valjaonicom lima.
1.3. Primeri raqunarskih sistema automatskog upravljanja 15
–
PS
PST
T
ME
ME
D/A
T
T
A/DPS MP
1
1 1
2
Ogledalo
Slika 1.17: Funkcionalno simboliqka xema RSAR-a polo�aja ogledala
solarne elektrane
D/AD/A A/D A/D
Digitalni raa~unar
�
�z
L
z
L�
�
z
L
v
Slika 1.18: Funkcionalno-simboliqna xema RSAR-a valjaonicom lima
16 Poglavlje 1. Uvod u Raqunarsko upravljanje
δz je �eljena a δ stvarna debljina lima. ζ z je �eljeni a ζ stvarni
napon lima. vz je zadata brzina valjanja.
Raqunar prima �eljene vrednosti navedenih veliqina u digitalnom
obliku.
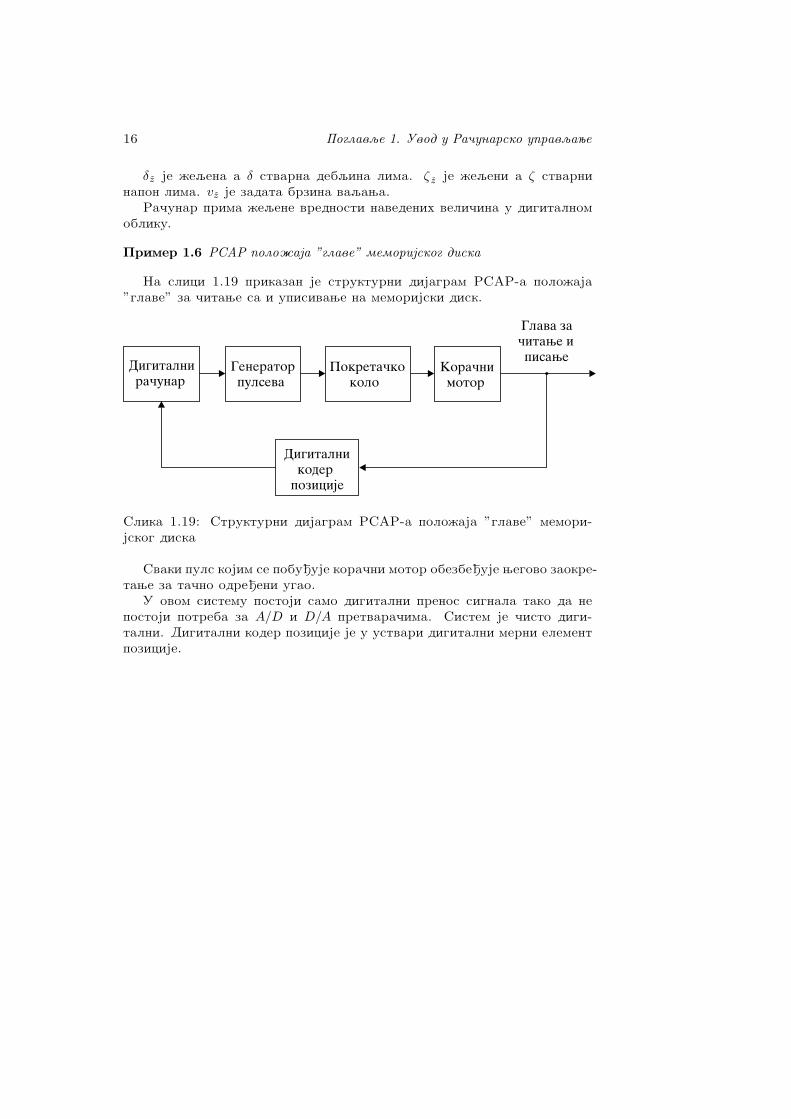
Primer 1.6 RSAR polo�aja ”glave” memorijskog diska
Na slici 1.19 prikazan je strukturni dijagram RSAR-a polo�aja
”glave” za qitanje sa i upisivanje na memorijski disk.
Digitalnira~unar
Generatorpulseva
Pokreta~kokolo
Kora~nimotor
Digitalnikoder
pozicije
Glava za~itawe ipisawe
Slika 1.19: Strukturni dijagram RSAR-a polo�aja ”glave” memori-
jskog diska
Svaki puls kojim se pobu�uje koraqni motor obezbe�uje njegovo zaokre-
tanje za taqno odre�eni ugao.
U ovom sistemu postoji samo digitalni prenos signala tako da ne
postoji potreba za A/D i D/A pretvaraqima. Sistem je qisto digi-
talni. Digitalni koder pozicije je u ustvari digitalni merni element
pozicije.
Related Documents











