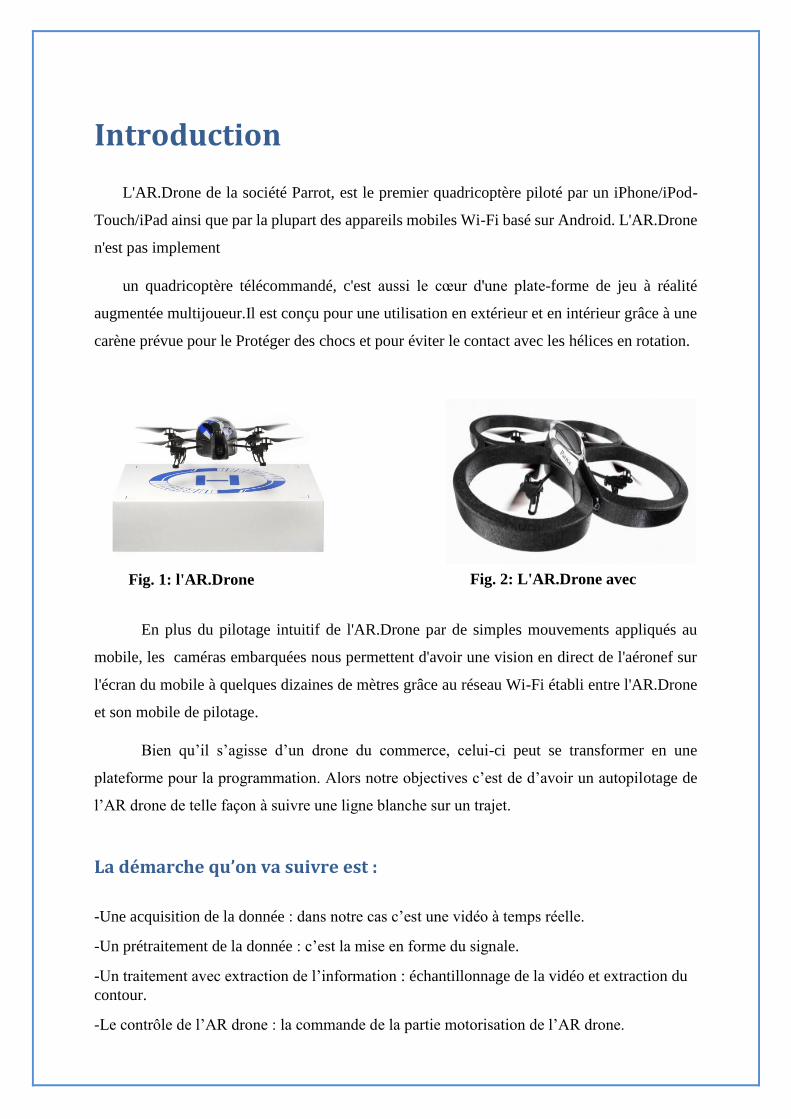
Introduction L'AR.Drone de la société Parrot, est le premier quadricoptère piloté par un iPhone/iPod- Touch/iPad ainsi que par la plupart des appareils mobiles Wi-Fi basé sur Android. L'AR.Drone n'est pas implement un quadricoptère télécommandé, c'est aussi le cœur d'une plate-forme de jeu à réalité augmentée multijoueur.Il est conçu pour une utilisation en extérieur et en intérieur grâce à une carène prévue pour le Protéger des chocs et pour éviter le contact avec les hélices en rotation. En plus du pilotage intuitif de l'AR.Drone par de simples mouvements appliqués au mobile, les caméras embarquées nous permettent d'avoir une vision en direct de l'aéronef sur l'écran du mobile à quelques dizaines de mètres grâce au réseau Wi-Fi établi entre l'AR.Drone et son mobile de pilotage. Bien qu’il s’agisse d’un drone du commerce, celui-ci peut se transformer en une plateforme pour la programmation. Alors notre objectives c’est de d’avoir un autopil otage de l’AR drone de telle façon à suivre une ligne blanche sur un trajet. La démarche qu’on va suivre est : -Une acquisition de la donnée : dans notre cas c’est une vidéo à temps réelle. -Un prétraitement de la donnée : c’est la mise en forme du signale. -Un traitement avec extraction de l’information : échantillonnage de la vidéo et extraction du contour. -Le contrôle de l’AR drone : la commande de la partie motorisation de l’AR drone. Fig. 1: l'AR.Drone Fig. 2: L'AR.Drone avec carène

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Introduction
L'AR.Drone de la société Parrot, est le premier quadricoptère piloté par un iPhone/iPod-
Touch/iPad ainsi que par la plupart des appareils mobiles Wi-Fi basé sur Android. L'AR.Drone
n'est pas implement
un quadricoptère télécommandé, c'est aussi le cœur d'une plate-forme de jeu à réalité
augmentée multijoueur.Il est conçu pour une utilisation en extérieur et en intérieur grâce à une
carène prévue pour le Protéger des chocs et pour éviter le contact avec les hélices en rotation.
En plus du pilotage intuitif de l'AR.Drone par de simples mouvements appliqués au
mobile, les caméras embarquées nous permettent d'avoir une vision en direct de l'aéronef sur
l'écran du mobile à quelques dizaines de mètres grâce au réseau Wi-Fi établi entre l'AR.Drone
et son mobile de pilotage.
Bien qu’il s’agisse d’un drone du commerce, celui-ci peut se transformer en une
plateforme pour la programmation. Alors notre objectives c’est de d’avoir un autopilotage de
l’AR drone de telle façon à suivre une ligne blanche sur un trajet.
La démarche qu’on va suivre est :
-Une acquisition de la donnée : dans notre cas c’est une vidéo à temps réelle.
-Un prétraitement de la donnée : c’est la mise en forme du signale.
-Un traitement avec extraction de l’information : échantillonnage de la vidéo et extraction du
contour.
-Le contrôle de l’AR drone : la commande de la partie motorisation de l’AR drone.
Fig. 1: l'AR.Drone Fig. 2: L'AR.Drone avec
carène
-Pui une simulation pour tester la démarche.
Présentation du système AR Drone
1.2 Décomposition de l'AR.Drone :
Afin de comprendre la structure interne de l'AR.Drone, il est utile de proposer, dans un
premier temps, une décomposition du bloc « AR.Drone » sous la forme d'un diagramme de
définition de blocs (voir BDD page suivante), puis dans un deuxième temps, d'étudier les flux
entre les différentes parties.
Les principaux blocs sont :
• « CarteMere » : C'est l'unité de traitement (le nom « Carte Mère » choisi pour ce bloc
vient de l'appellation donnée par la société Parrot aux pièces détachées remplaçables
par l'utilisateur comme les moteurs, les hélices, etc.). C'est sur cette unité de traitement
que s'exécute le système d'exploitation Linux et le micro-logiciel responsable du fonc-
tionnement global de l'AR.Drone (voir Annexe A). On rappelle les principales caracté-
ristiques de la carte mère dans
le tableau suivant :
Processeur • Processeur P6 conçu pour Parrot basé sur l'ARM9 468 MHz
Mémoire • Mémoire flash NAND 32Mo
• RAM DDR 128 Mo à 200MHz
Système d'exploitation • Linux
• « CarteMoteur » : cette carte embarque une unité de traitement spécifique et l'électro-
nique nécessaire pour contrôler la vitesse d'un moteur. On y adjoint le réducteur et
l'hélice pour compléter la description. Comme l'indique la multiplicité, l'AR.Drone
possède 4 cartes moteur.
• « CarteNavigation » : cette carte est aussi composée d'une unité de traitement et des
composants électroniques et MEMS (Microelectromechanical systems) nécessaires
pour relever l'altitude, les vitesses angulaires et les accélérations linéaires de
l'AR.Drone (blocs « Altimetre » et « CentraleInertielle »). Le but de cette carte est de
fournir les données permettant à la carte mère de calculer l'altitude, les angles de rou-
lis, tangage et lacet (roll, pitch et yaw) et les vitesses linéaires pour les axes X, Y et Z
de l'AR.Drone.
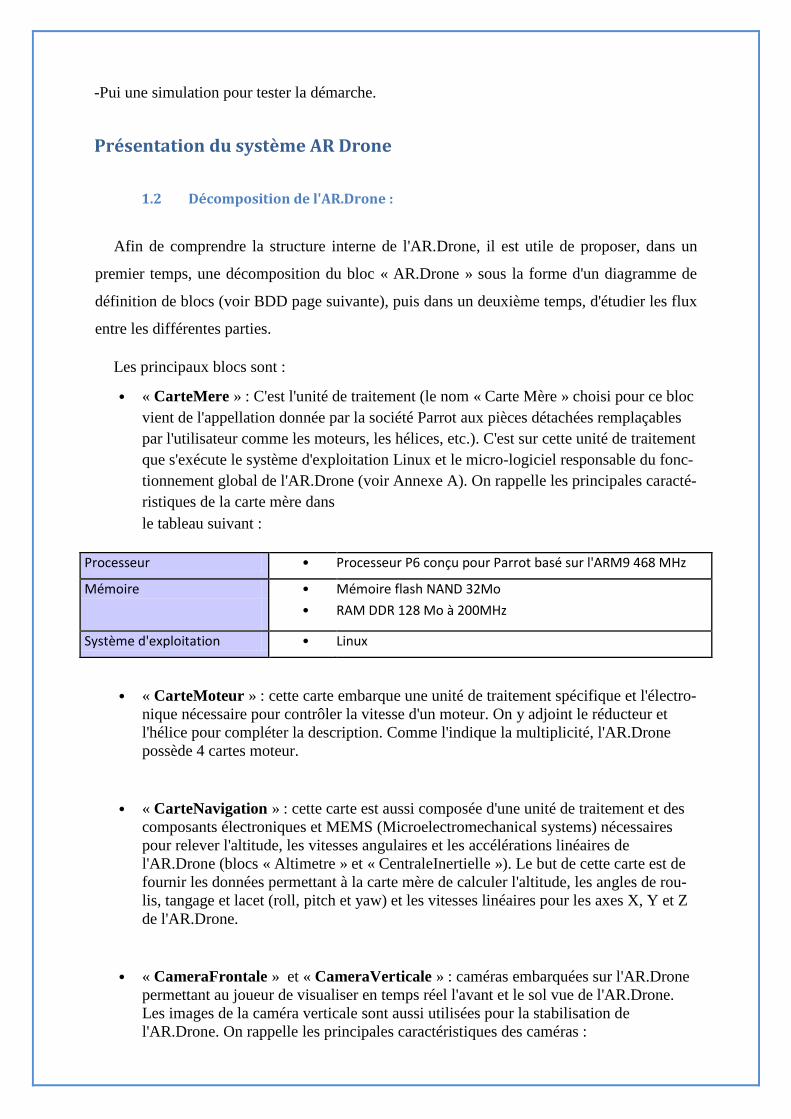
• « CameraFrontale » et « CameraVerticale » : caméras embarquées sur l'AR.Drone
permettant au joueur de visualiser en temps réel l'avant et le sol vue de l'AR.Drone.
Les images de la caméra verticale sont aussi utilisées pour la stabilisation de
l'AR.Drone. On rappelle les principales caractéristiques des caméras :
Caméra Frontale • Diagonale de la lentille 93°
• Capteur CMOS.
• Résolution 640x480 pixels (VGA)
• 15 images/sec.
Caméra Verticale • Diagonale de la lentille 64°
• Capteur CMOS.
• Résolution 176x144 pixels (QCIF)
• 60 images/sec.
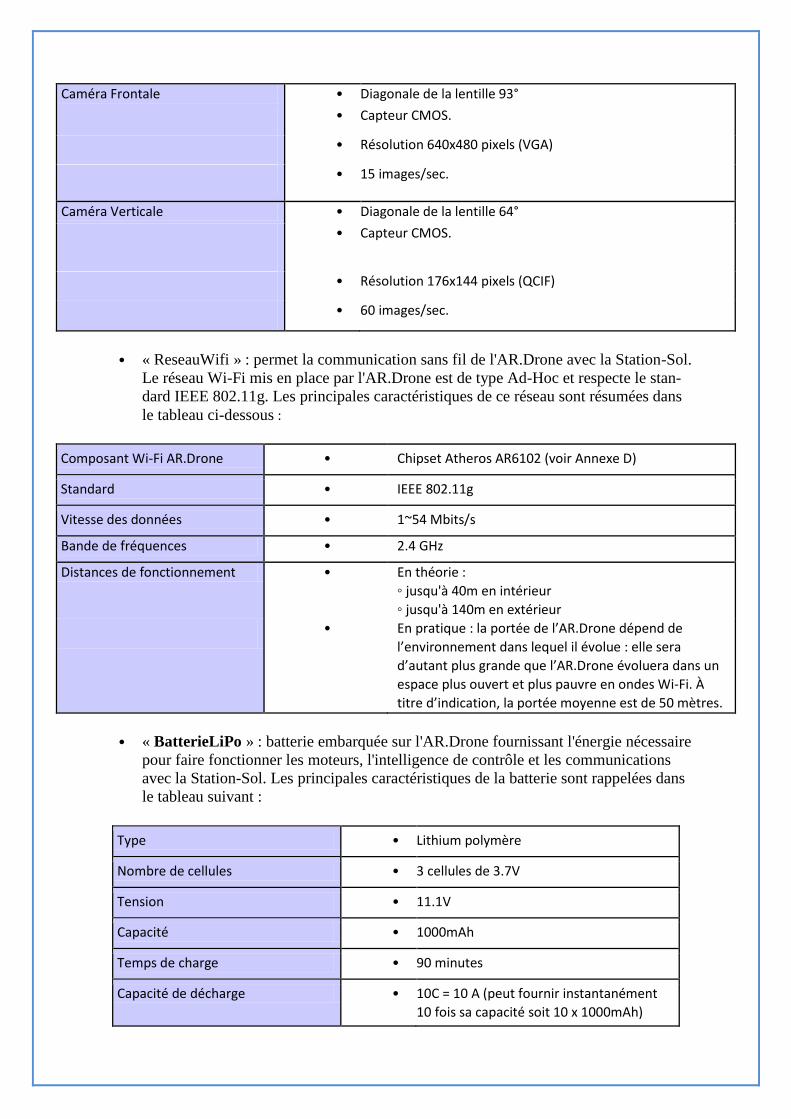
• « ReseauWifi » : permet la communication sans fil de l'AR.Drone avec la Station-Sol.
Le réseau Wi-Fi mis en place par l'AR.Drone est de type Ad-Hoc et respecte le stan-
dard IEEE 802.11g. Les principales caractéristiques de ce réseau sont résumées dans
le tableau ci-dessous :
Composant Wi-Fi AR.Drone • Chipset Atheros AR6102 (voir Annexe D)
Standard • IEEE 802.11g
Vitesse des données • 1~54 Mbits/s
Bande de fréquences • 2.4 GHz
Distances de fonctionnement • En théorie :
◦ jusqu'à 40m en intérieur
◦ jusqu'à 140m en extérieur
• En pratique : la portée de l’AR.Drone dépend de
l’environnement dans lequel il évolue : elle sera
d’autant plus grande que l’AR.Drone évoluera dans un
espace plus ouvert et plus pauvre en ondes Wi-Fi. À
titre d’indication, la portée moyenne est de 50 mètres.
• « BatterieLiPo » : batterie embarquée sur l'AR.Drone fournissant l'énergie nécessaire
pour faire fonctionner les moteurs, l'intelligence de contrôle et les communications
avec la Station-Sol. Les principales caractéristiques de la batterie sont rappelées dans
le tableau suivant :
Type • Lithium polymère
Nombre de cellules • 3 cellules de 3.7V
Tension • 11.1V
Capacité • 1000mAh
Temps de charge • 90 minutes
Capacité de décharge • 10C = 10 A (peut fournir instantanément
10 fois sa capacité soit 10 x 1000mAh)
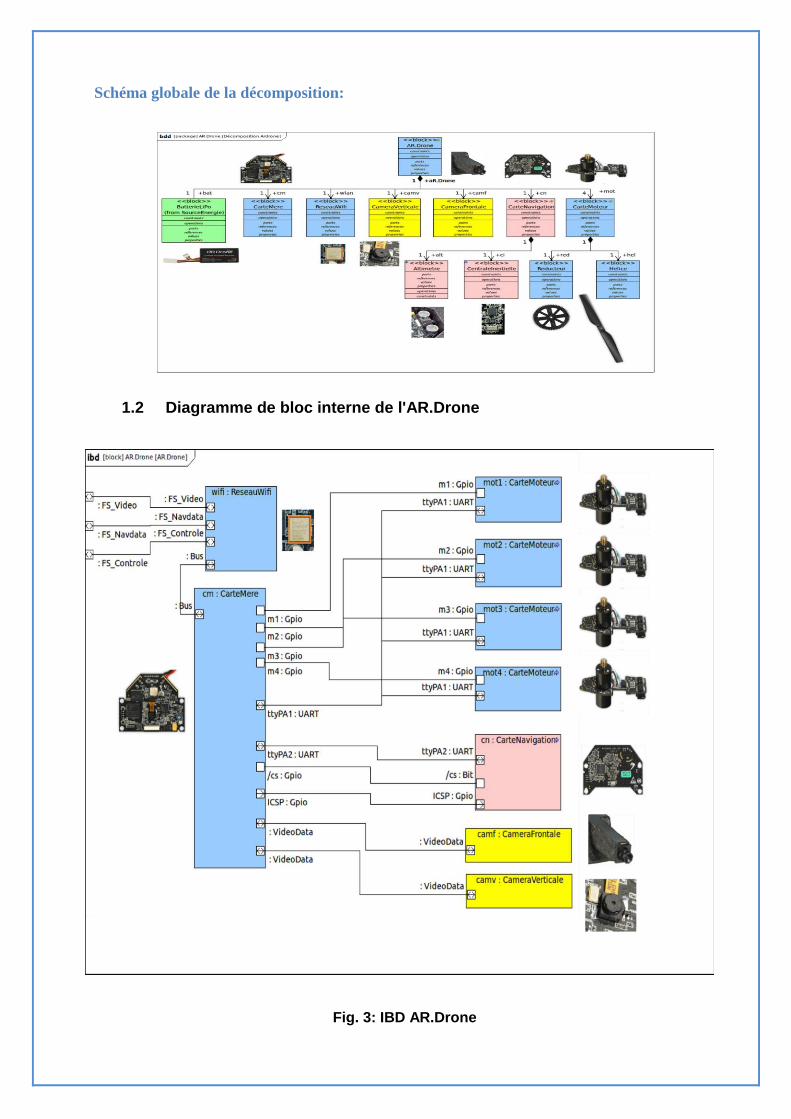
Schéma globale de la décomposition:
1.2 Diagramme de bloc interne de l'AR.Drone
Fig. 3: IBD AR.Drone
On donne les principales caractéristiques des liaisons entre les instances de blocs :
• Liaison « CarteMere » - « CarteMoteur »: elle est constituée de deux ports :
un port standard pour la sélection du moteur. Exemple : m1:Gpio
un flux ttyPA1:UART : c'est une liaison série de type RS232 servant de support
aux données échangées entre la carte mère et le moteur (commandes et états du
moteur, commande led, etc.) selon un protocole propriétaire (non documenté).
• Liaison « CarteMere » - « CarteNavigation » : elle est constituée de 3 ports :
un port standard pour la sélection de la carte de navigation : /cs:Bit
un flux ttyPA2:UART : c'est aussi une liaison série de type RS232 servant de
support aux données échangées entre la carte mère et la carte de navigation
(données brutes des accéléromètres, gyroscope, et altimètre) selon un protocole
propriétaire (non documenté).
un flux ICSP:Gpio : (re)programmation du micro-logiciel de la carte de
navigation
• Liaison « CarteMere » - « CameraFrontale » et « CarteMere » - « CameraVerticale
» : flux à différentes composantes (contrôle de la caméra et données vidéo).
• Liaison « CarteMere » - «ReseauWifi » : bus de données et de contrôle entre l'unité
de traitement et le composant chargé de la communication sur le réseau Wi-Fi.
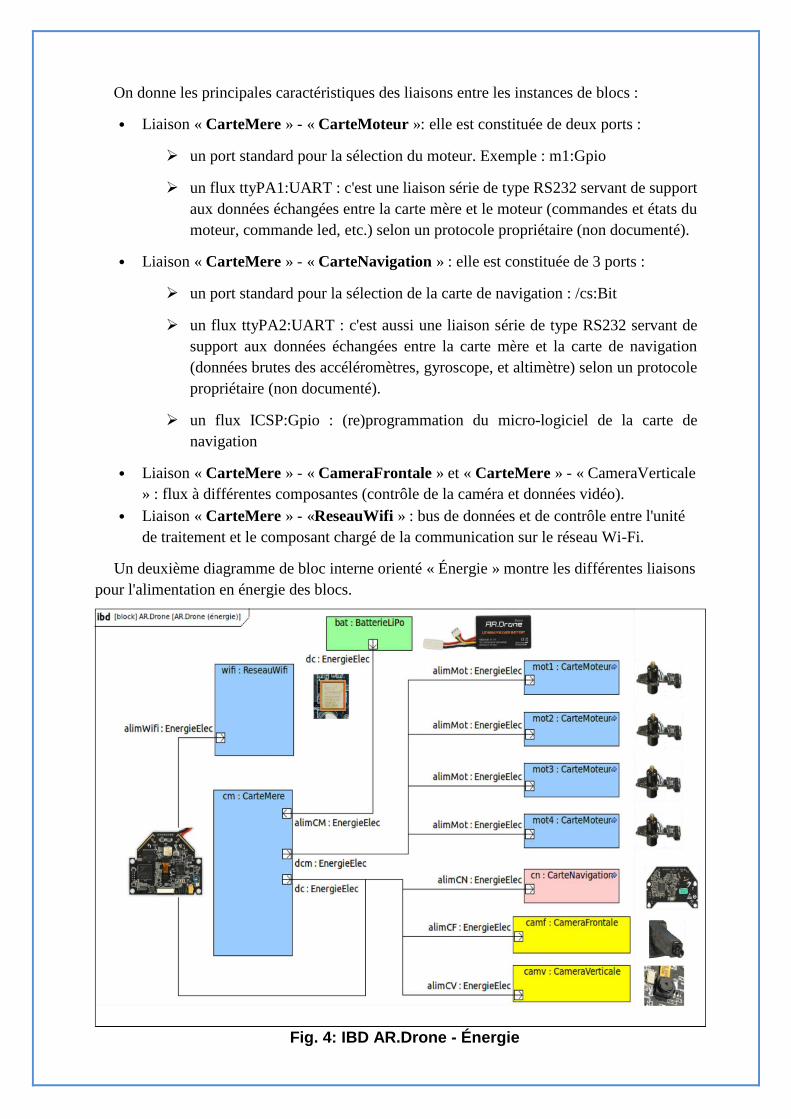
Un deuxième diagramme de bloc interne orienté « Énergie » montre les différentes liaisons
pour l'alimentation en énergie des blocs.
Fig. 4: IBD AR.Drone - Énergie
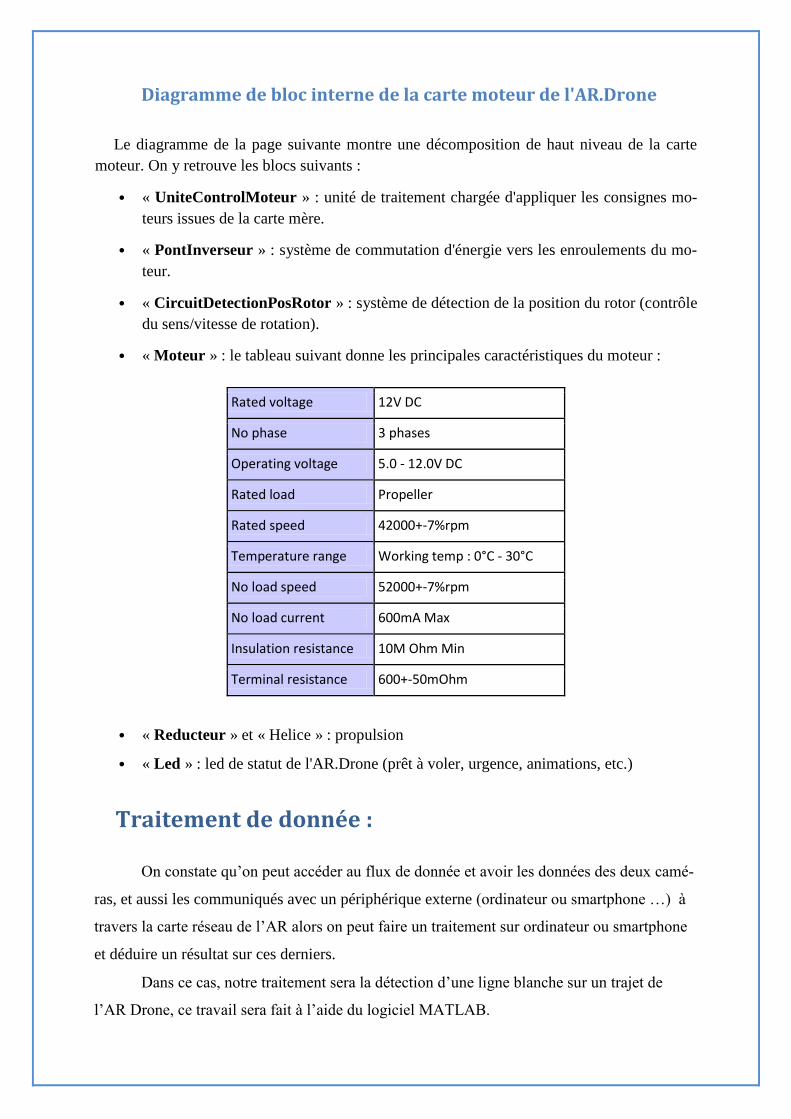
Diagramme de bloc interne de la carte moteur de l'AR.Drone
Le diagramme de la page suivante montre une décomposition de haut niveau de la carte
moteur. On y retrouve les blocs suivants :
• « UniteControlMoteur » : unité de traitement chargée d'appliquer les consignes mo-
teurs issues de la carte mère.
• « PontInverseur » : système de commutation d'énergie vers les enroulements du mo-
teur.
• « CircuitDetectionPosRotor » : système de détection de la position du rotor (contrôle
du sens/vitesse de rotation).
• « Moteur » : le tableau suivant donne les principales caractéristiques du moteur :
Rated voltage 12V DC
No phase 3 phases
Operating voltage 5.0 - 12.0V DC
Rated load Propeller
Rated speed 42000+-7%rpm
Temperature range Working temp : 0°C - 30°C
No load speed 52000+-7%rpm
No load current 600mA Max
Insulation resistance 10M Ohm Min
Terminal resistance 600+-50mOhm
• « Reducteur » et « Helice » : propulsion
• « Led » : led de statut de l'AR.Drone (prêt à voler, urgence, animations, etc.)
Traitement de donnée :
On constate qu’on peut accéder au flux de donnée et avoir les données des deux camé-
ras, et aussi les communiqués avec un périphérique externe (ordinateur ou smartphone …) à
travers la carte réseau de l’AR alors on peut faire un traitement sur ordinateur ou smartphone
et déduire un résultat sur ces derniers.
Dans ce cas, notre traitement sera la détection d’une ligne blanche sur un trajet de
l’AR Drone, ce travail sera fait à l’aide du logiciel MATLAB.
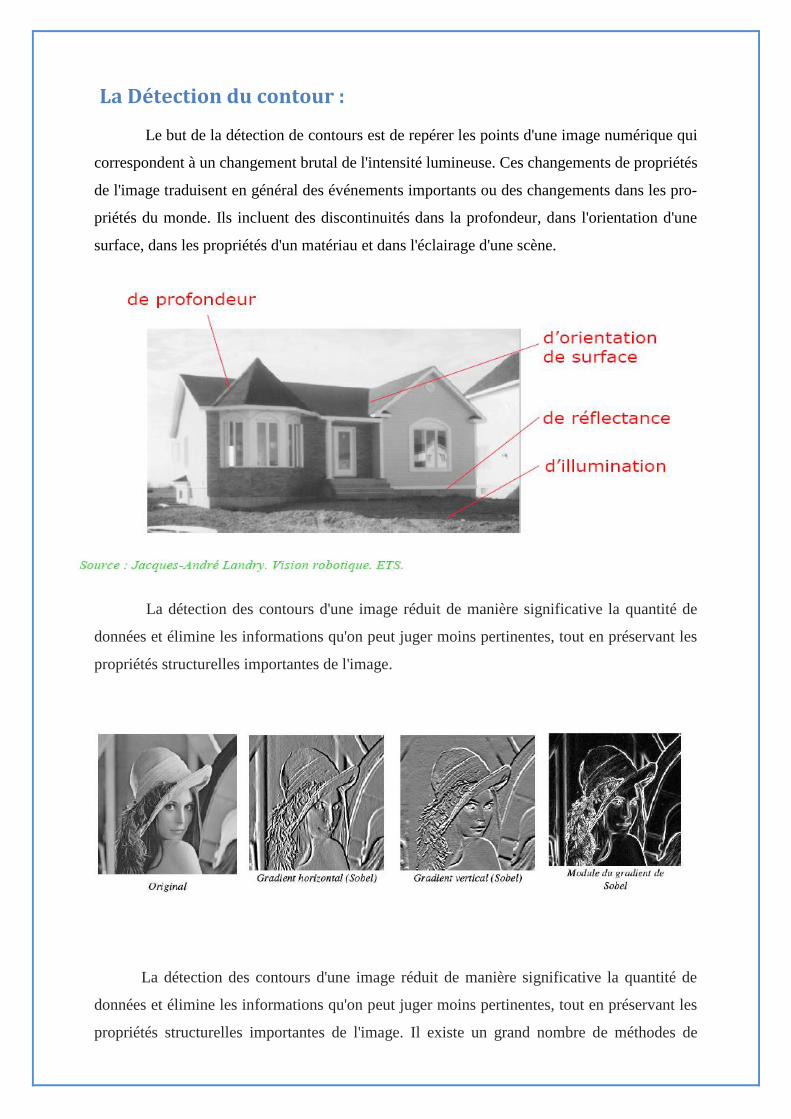
La Détection du contour :
Le but de la détection de contours est de repérer les points d'une image numérique qui
correspondent à un changement brutal de l'intensité lumineuse. Ces changements de propriétés
de l'image traduisent en général des événements importants ou des changements dans les pro-
priétés du monde. Ils incluent des discontinuités dans la profondeur, dans l'orientation d'une
surface, dans les propriétés d'un matériau et dans l'éclairage d'une scène.
La détection des contours d'une image réduit de manière significative la quantité de
données et élimine les informations qu'on peut juger moins pertinentes, tout en préservant les
propriétés structurelles importantes de l'image.
La détection des contours d'une image réduit de manière significative la quantité de
données et élimine les informations qu'on peut juger moins pertinentes, tout en préservant les
propriétés structurelles importantes de l'image. Il existe un grand nombre de méthodes de
détection de l'image mais la plupart d'entre elles peuvent être regroupées en deux catégories.
La première recherche les extremums de la dérivée première, en général les maximums locaux
de l'intensité du gradient. La seconde recherche les annulations de la dérivée seconde, en général
les annulations du laplacien ou d'une expression différentielle non-linéaire.
Dans notre cas il faut détecter ou extraire le contour d’une ligne blanche
Programmation à l’aide de MATLAB
Les étapes de traitement :
Apporter les données : c’est la vidéo.
Echantillonnée en séquence les images de la vidéo.
Seuillage de l’image (Binarisation).
Filtrage de l’image.
Détection de la ligne blanche.
Détection du changement de trajet de la ligne.
Assemblage des images résultantes.
Fig 6: exemple de trajet qu’on peut avoir d’une ligne blanche
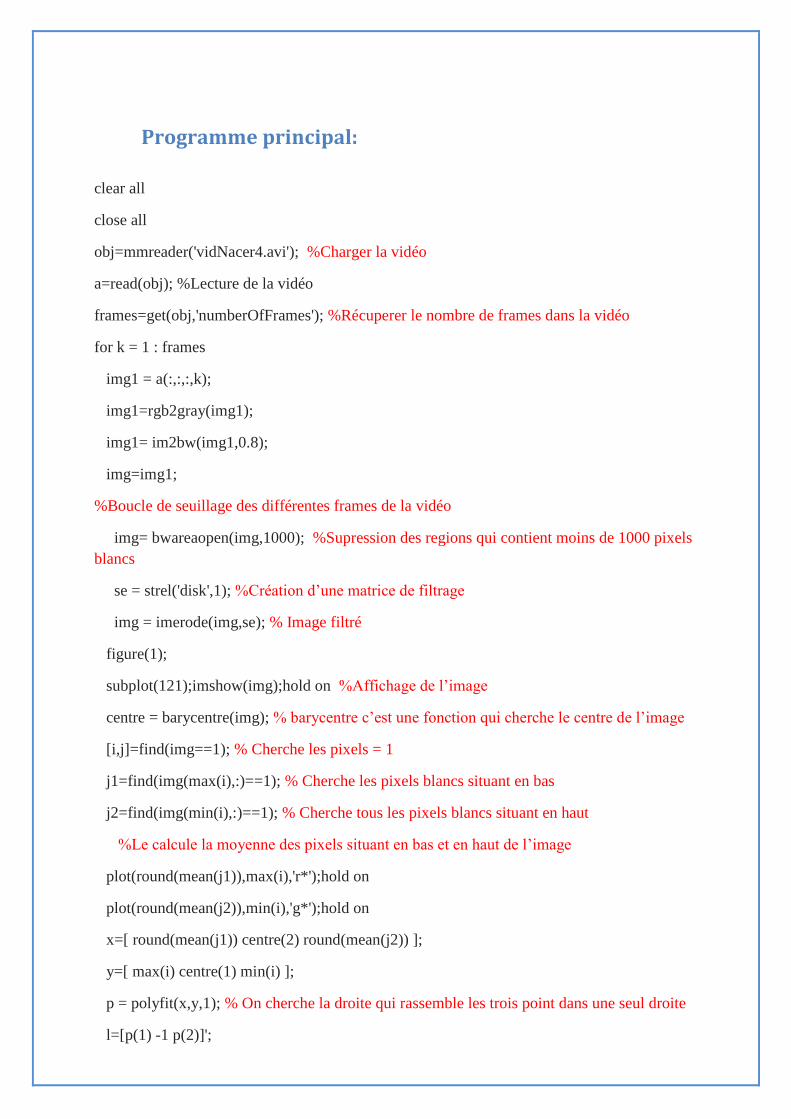
Programme principal:
clear all
close all
obj=mmreader('vidNacer4.avi'); %Charger la vidéo
a=read(obj); %Lecture de la vidéo
frames=get(obj,'numberOfFrames'); %Récuperer le nombre de frames dans la vidéo
for k = 1 : frames
img1 = a(:,:,:,k);
img1=rgb2gray(img1);
img1= im2bw(img1,0.8);
img=img1;
%Boucle de seuillage des différentes frames de la vidéo
img= bwareaopen(img,1000); %Supression des regions qui contient moins de 1000 pixels
blancs
se = strel('disk',1); %Création d’une matrice de filtrage
img = imerode(img,se); % Image filtré
figure(1);
subplot(121);imshow(img);hold on %Affichage de l’image
centre = barycentre(img); % barycentre c’est une fonction qui cherche le centre de l’image
[i,j]=find(img==1); % Cherche les pixels = 1
j1=find(img(max(i),:)==1); % Cherche les pixels blancs situant en bas
j2=find(img(min(i),:)==1); % Cherche tous les pixels blancs situant en haut
%Le calcule la moyenne des pixels situant en bas et en haut de l’image
plot(round(mean(j1)),max(i),'r*');hold on
plot(round(mean(j2)),min(i),'g*');hold on
x=[ round(mean(j1)) centre(2) round(mean(j2)) ];
y=[ max(i) centre(1) min(i) ];
p = polyfit(x,y,1); % On cherche la droite qui rassemble les trois point dans une seul droite
l=[p(1) -1 p(2)]';
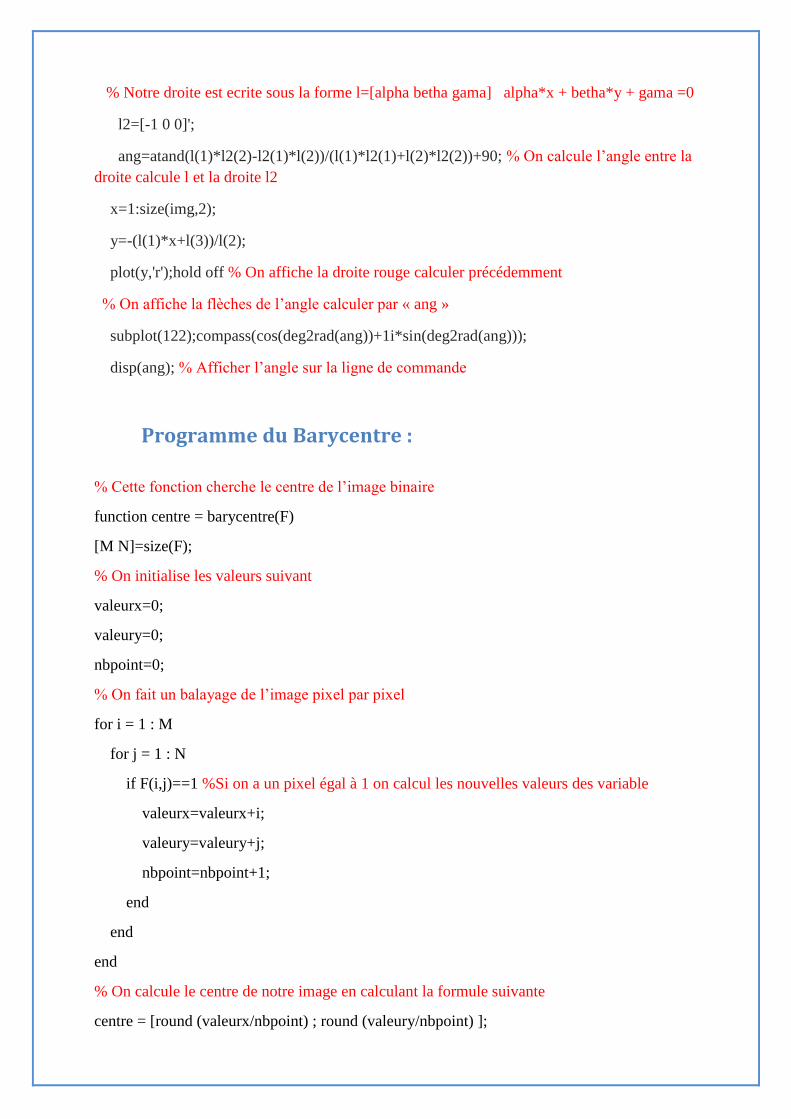
% Notre droite est ecrite sous la forme l=[alpha betha gama] alpha*x + betha*y + gama =0
l2=[-1 0 0]';
ang=atand(l(1)*l2(2)-l2(1)*l(2))/(l(1)*l2(1)+l(2)*l2(2))+90; % On calcule l’angle entre la
droite calcule l et la droite l2
x=1:size(img,2);
y=-(l(1)*x+l(3))/l(2);
plot(y,'r');hold off % On affiche la droite rouge calculer précédemment
% On affiche la flèches de l’angle calculer par « ang »
subplot(122);compass(cos(deg2rad(ang))+1i*sin(deg2rad(ang)));
disp(ang); % Afficher l’angle sur la ligne de commande
Programme du Barycentre :
% Cette fonction cherche le centre de l’image binaire
function centre = barycentre(F)
[M N]=size(F);
% On initialise les valeurs suivant
valeurx=0;
valeury=0;
nbpoint=0;
% On fait un balayage de l’image pixel par pixel
for i = 1 : M
for j = 1 : N
if F(i,j)==1 %Si on a un pixel égal à 1 on calcul les nouvelles valeurs des variable
valeurx=valeurx+i;
valeury=valeury+j;
nbpoint=nbpoint+1;
end
end
end
% On calcule le centre de notre image en calculant la formule suivante
centre = [round (valeurx/nbpoint) ; round (valeury/nbpoint) ];
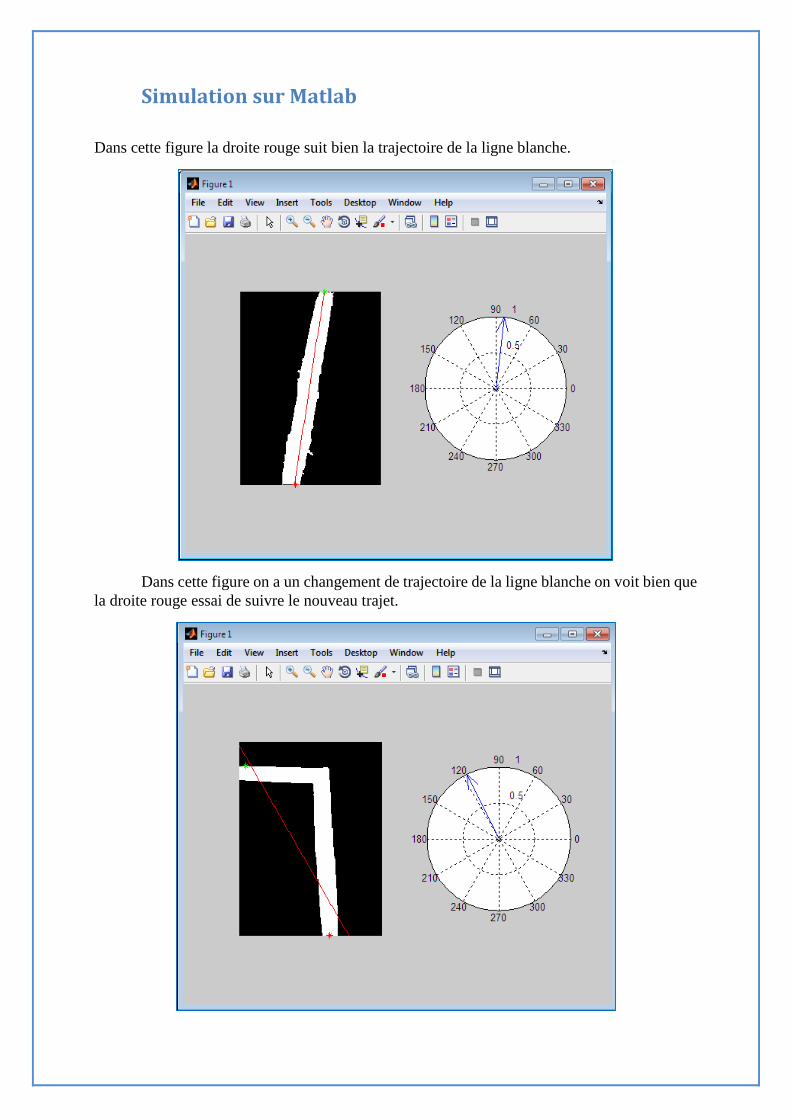
Simulation sur Matlab
Dans cette figure la droite rouge suit bien la trajectoire de la ligne blanche.
Dans cette figure on a un changement de trajectoire de la ligne blanche on voit bien que
la droite rouge essai de suivre le nouveau trajet.

Commande de l’AR Drone
Nous avons estimé le trajet de la ligne blanche, alors on peut communiquer ces données avec
le ficher de commande de l’AR Drone (voire l’annexe).
La partie de commande de trajet de L’AR Drone est la suivante :
%-------------------------------------------------------------------------% % % % définition du traject souhaitable de L'AR Drone % % % %-------------------------------------------------------------------------% % Altitude tAltitude = [data(41) data(42) data(43) data(44)]; drone.Altitude = single(typecast(tAltitude,
'int32'))/ 1000;
% X Velocity Vx = [data(45) data(46) data(47) data(48)]; drone.X_Velocity = typecast(Vx, 'single') / 1000;
% Y Velocity Vy = [data(49) data(50) data(51) data(52)]; drone.Y_Velocity = typecast(Vy, 'single') / 1000;
% Entire NavData Packet drone.NavData = data; end %--------------------------------------------------------------------------
Conclusion :
Ce travail nous a permet de familiariser avec les techniques de traitement d’images qu’on n’a vue
théoriquement lors du cours de traitement d’image. Ainsi l’application de ces techniques dans un
système réel l’AR Drone .nous avons confronté pas mal de problèmes techniques lors de ce travail tel
que l’implémentation pratique du programme sur l’AR Drone à cause des problème lors de la
simulation du programme de la commande de l’AR Drone ainsi un manque de connaissance u niveau
de fichier de paramétrage du système .mais ce travail est un support assez fort et important pour
autre applications de l’AR Drone tel que l’implémentation ou l’exploitation du GPS et le traitement d’image pour un Autopilotage.
Annexe :
classdef ARDrone < handle
% ARDrone Class
% Controls AR Parrot Drone
properties
seq = 3;
ARc;
ARn;
% NavData Properties
Control_State = [];
Battery_Voltage = 0;
Pitch = 0;
Roll = 0;
Yaw = 0;
Altitude = 0;
X_Velocity = 0;
Y_Velocity = 0;
NavData = 0;
end
methods
function [obj] = ARDrone()
instrreset
clc
global fh;
%Create Control connection
obj.ARc = udp('192.168.1.1', 5556, 'LocalPort', 5556);
fopen(obj.ARc);
fh = 0;
%Create NavData connection
obj.ARn = udp('192.168.1.1', 5554, 'LocalPort', 5554, ...
'ByteOrder', 'littleEndian', ...
'InputBufferSize', 500, ...
'BytesAvailableFcn', {@navPacketRxCallback,obj}, ...
'DatagramTerminateMode', 'on', ...
'BytesAvailableFcnMode', 'byte', ...
'BytesAvailableFcnCount', 24);
fopen(obj.ARn);
% Byte to NavData port for initialization
fwrite(obj.ARn, 1);
% NavData command to command port
AR_NAV_CONFIG = sprintf('AT*CONFIG=2,\"general:navdata_demo\",\"TRUE\"\r');
fprintf(obj.ARc, AR_NAV_CONFIG);
% Flicker LEDs
obj.command('LED', '1,5,5,5,5')
function navPacketRxCallback(obj, event, drone)
if (get(obj, 'BytesAvailable') ~= 0)
data = fread(obj);
data = uint8(data);
if ~isempty(data);
% Drone Control State Information
drone_state = [data(5) data(6) data(7) data(8)];
drone_state = typecast(drone_state, 'uint32');
for i = 1:32
drone.Control_State(i) = bitget(drone_state, i);
end
% Battery Voltage Percentage
vBattery = [data(25) data(26) data(27) data(28)];
drone.Battery_Voltage = typecast(vBattery, 'uint32');
% Theta (Pitch) Values
tPitch = [data(29) data(30) data(31) data(32)];
drone.Pitch = typecast(tPitch, 'single') / 1000;
% Phi (Roll) Values
tRoll = [data(33) data(34) data(35) data(36)];
drone.Roll = typecast(tRoll, 'single') / 1000;
% Psi (Yaw) Values
tYaw = [data(37) data(38) data(39) data(40)];
drone.Yaw = typecast(tYaw, 'single') / 1000;
%------------------------------------------------------------------------------------------------------------------------------------
-
% Altitude
tAltitude = [data(41) data(42) data(43) data(44)];
drone.Altitude = single(typecast(tAltitude, 'int32'))/ 1000;
% X Velocity
Vx = [data(45) data(46) data(47) data(48)];
drone.X_Velocity = typecast(Vx, 'single') / 1000;
% Y Velocity
Vy = [data(49) data(50) data(51) data(52)];
drone.Y_Velocity = typecast(Vy, 'single') / 1000;
% Entire NavData Packet
drone.NavData = data;
end
%----------------------------------------------------------------------------------------------------------------------------------------
% Reset Drone Watchdog Bit
AR_WDG = strcat('AT*COMWDG=',num2str(drone.seq),',');
fprintf(drone.ARc, AR_WDG);
drone.seq = drone.seq + 1;
% if fh ~= 0
% if strcmp(get(fh, 'Selected'), 'off')
% set(fh, 'Selected', 'on')
% end
% end
%
end
end
end
function command(obj, command_type, code)
AR_CMD = sprintf( 'AT*%s=%i,%s\r', command_type, obj.seq, code);
fprintf(obj.ARc, AR_CMD);
obj.seq = obj.seq + 1;
end
function takeoff(obj)
obj.command('FTRIM','')
obj.command('CONFIG','\"control:altitude_max\", \"20000\"')
obj.command('REF','290718208')
end
function hover(obj)
obj.drive([0,0,0,0])
end
function land(obj)
obj.command('REF','290717696')
end
function emergency(obj)
obj.command('REF','290717952')
obj.command('REF','290717696')
end
function drive(obj, speed)
% Controls the robot movement directly using motor speeds
fvel = typecast(single(speed(1)/2), 'int32');
lvel = typecast(single(speed(2)/2), 'int32');
uvel = typecast(single(speed(3)/2), 'int32');
rvel = typecast(single(speed(4)/2), 'int32');
fvel_str = strcat(num2str(fvel),',');
lvel_str = strcat(num2str(lvel),',');
uvel_str = strcat(num2str(uvel),',');
rvel_str = num2str(rvel);
obj.command('PCMD',strcat('1,', lvel_str, fvel_str, uvel_str, rvel_str))
end
function moveUp(obj, speed)
obj.drive([0,0,speed,0])
end
function moveDown(obj, speed)
obj.drive([0,0,-speed,0])
end
function moveLeft(obj, speed)
% Moves the robot left at a specific speed
obj.drive([0,-speed,0,0])
end
function moveRight(obj, speed)
% Moves the robot right at a specific speed
obj.drive([0,speed,0,0])
end
function moveForward(obj, speed)
% Moves the robot forward at a specific speed
obj.drive([-speed,0,0,0])
end
function moveReverse(obj, speed)
% Moves the robot forward at a specific speed
obj.drive([speed,0,0,0])
end
function rotateLeft(obj, omega)
% Rotates robot left
obj.drive([0,0,0, -omega])
end
function rotateRight(obj, omega)
obj.drive([0,0,0, omega])
end
function stop(obj)
% Stop all Robot motion and close communications.
obj.land
fclose(obj.ARn);
fclose(obj.ARc);
end
function control(obj, varargin)
clc
disp('Controls');
disp('arrow keys = up,down,rotate_left,rotate_right');
disp( 'w,a,s,d = move:forward,backward,left,right');
disp('enter,spacebar,shift = takeoff,land,hover');
disp('q = quit program');
% Manually control robot using W/S (forward/reverse), A/D
% (strafe left/right), I/K (vertical up/down), J/L (turn left/right)
% E (emergency stop), and Q (quit) keys.
global fh;
if nargin == 2
vel = varargin{1};
else
vel = .5;
end
left = 0;
bottom = 0;
width = 100;
height = 150;
fh = figure(...
'name','ARDrone Controller', ...
'keypressfcn',@keyPress, ...
'windowstyle','modal',...
'numbertitle','off', ...
'Position',[left bottom width*3 height],...
'userdata','timeout',...
'Color','white') ;
t = timer('TimerFcn',{@display_Nav,obj},'ExecutionMode','fixedRate');
start(t)
function keyPress(~, event)
%obj.display_Nav();
if (strcmp(event.Character, 'q'))
obj.command('REF','290717952')
stop(t)
delete(t)
delete(fh)
fh = 0;
end
cmd = event.Key;
switch (cmd)
case 'return' % Take off
obj.takeoff()
case 'space' % Land
obj.land()
case 'e' % Emergency
obj.emergency()
case 'a' % Rotate Left
obj.rotateLeft(vel)
case 'd' % Rotate Right
obj.rotateRight(vel)
case 'uparrow' % Up
obj.moveUp(vel)
case 'downarrow' % Down
obj.moveDown(vel)
case 'shift' % Hover
obj.hover()
case 'leftarrow' % Left
obj.moveLeft(vel)
case 'rightarrow' % Right
obj.moveRight(vel)
case 'w' % Forward
obj.moveForward(vel)
case 's' % Backward
obj.moveReverse(vel)
case 'q'
disp('Quitting...')
otherwise
disp('Unknown Command')
end
end
function display_Nav(value,event,obj)
left = 0;
bottom = 0;
width = 100;
height = 150;
labels = uicontrol('Style','text','Position',[left bottom width height],'HorizontalAlignment', 'left',
'FontSize', 14,'BackgroundColor','white');
str1 = 'Battery';
str2 = 'Pitch';
str3 = 'Yaw';
str4 = 'Roll';
str5 = 'Altitude';
str6 = 'X_Velocity';
str7 = 'Y_Velocity';
set(labels,'String',{str1,str2,str3,str4,str5,str6,str7});
values = uicontrol('Style','text','Position',[left+width bottom width
height],'HorizontalAlignment', 'right', 'FontSize', 14,'BackgroundColor','white');
str1 = num2str(obj.Battery_Voltage);
str2 = num2str(obj.Pitch);
str3 = num2str(obj.Yaw);
str4 = num2str(obj.Roll);
str5 = num2str(obj.Altitude);
str6 = num2str(obj.X_Velocity);
str7 = num2str(obj.Y_Velocity);
set(values,'String',{str1,str2,str3,str4,str5,str6,str7});
units = uicontrol('Style','text','Position',[left+width+width+10 bottom width height],'HorizontalAlignment', 'left', 'FontSize', 14,'BackgroundColor','white');
str1 = num2str('volts');
str2 = num2str('degrees');
str3 = num2str('degrees');
str4 = num2str('degrees');
str5 = num2str('meters');
str6 = num2str('meters/sec');
str7 = num2str('meters/sec');
set(units,'String',{str1,str2,str3,str4,str5,str6,str7});
end
end
end
end
Related Documents