Rapid Retrieval and Assimilation of Ground Based GPS-Met Observations at the NOAA Forecast Systems Laboratory: Impact on Weather Forecasts Seth I. Gutman 1 , Kirk L. Holub 2 , Susan R. Sahm 1 , Jebb Q. Stewart 2 , Tracy Lorraine Smith 3 , Stanley G. Benjamin 4 , and Barry E. Schwartz 4 NOAA Forecast Systems Laboratory, Boulder, Colorado USA Abstract This year, 2003, marks the tenth anniversary of ground-based Global Positioning System meteorology. GPS- Met as we now know it started in 1992 with the definition of the essential techniques to retrieve integrated (total column) precipitable water vapor (IPW) from zenith-scaled neutral atmospheric signal delays (Bevis et al., 1992). It culminated with the GPS/Storm experiment in 1993, which demonstrated the ability to make IPW measurements with about the predicted accuracy under warm-weather conditions (Rocken et al., 1995). Since then, most of the major advances in GPS-Met data processing have been in the form of improved mapping functions (Niell, 1996), the estimation of GPS signal delays in an absolute (Duan et al., 1996) versus a relative sense (Rocken et al., 1993), and improved GPS satellite orbit accuracy with reduced latency (Fang et al., 1998). Experiments with other GPS-Met data processing techniques, such as the estimation of line-of-sight GPS signal delays using a double-difference to zero-difference technique described by Alber et al. (2000) and Braun et al. (2001) are noted, but lingering questions about the validity of this approach (Gutman, 2002), and not the potential value of a slant-path measurements per se, (as enumerated by MacDonald and Xie, 2001 or Ha et al., 2002) have thus far precluded its routine implementation at the National Oceanic and Atmospheric Administration Forecast Systems Laboratory (NOAA/FSL). Since 1994, NOAA/FSL has concentrated on evaluating the scientific and engineering bases of ground-based GPS-Met and assessing its utility for operational weather forecasting, climate monitoring, satellite calibration and validation, and improved differential GPS positioning and navigation. The term “rapid” in the title of this paper is defined as “available in time to be used for a specific application.” The requirement for high accuracy GPS-Met retrievals with lower latency is primarily driven by two factors: the trend toward shorter forecast cycles and higher spatial resolution in mesoscale numerical weather prediction (NWP) models, and the use by weather forecasters in subjective forecasting and/or model verification. GPS and ancillary surface meteorological observations, and improved satellite orbits, must be available on demand. Data processing hardware and techniques must provide GPS-Met retrievals in sufficient time to be assimilated into the current model cycle. Model data assimilation techniques must minimize the errors in estimating the initial state of a numerical forecast that come from spatial and temporal aliasing when interpolating discrete observations into an "analysis increment" field. While more GPS-Met retrievals can minimize horizontal aliasing, they can do little to minimize vertical aliasing that comes from assimilating any vertically integrated quantity (e.g. satellite radiances, zenith tropospheric signal delays, or GPS-IPW retrievals) into an NWP model. This is primarily because the forecast background error at a discrete vertical level must be estimated from the difference between observed and forecast integrated quantities. Absent the development of a new observing system or measurement technique, we must rely on improved data assimilation techniques, coupled with the more efficient use of complementary observing systems, to improve the three-dimensional description of moisture in the atmosphere. NOAA/FSL has conducted data denial experiments since 1998 to determine the statistical impact that GPS-IPW retrievals have on 3-hour moisture and precipitation forecasts in the central United States. Results from 5-years of experiments indicate more or less continuous improvement in forecast skill as the GPS-Met network expands. Improvements are observed in relative humidity forecast accuracy at all levels below 500 hPa, and all precipitation levels above “trace”. The impact steadily decreases with the length of the forecast; it is usually substantial from 0-3 hours, and negligible from 6-12 hours. The largest impacts usually occur during active weather, and usually manifest themselves as changes in the locations of boundaries such as fronts and dry lines. ___________________ 1 NOAA Research-Forecast Systems Laboratory R/FS3, Boulder, Colorado. 2 NOAA Research-Forecast Systems Laboratory R/FS3, Boulder, Colorado. Contract with Systems Research Group, Inc. (SRG), Colorado Springs, Colorado. 3 NOAA Research-Forecast Systems Laboratory R/FS1, Boulder, Colorado. In collaboration with the Cooperative Institute for Research in the Atmosphere (CIRA), Colorado State University, Fort Collins, Colorado. 4 NOAA Research-Forecast Systems Laboratory R/FS1, Boulder, Colorado U.S.A.. Corresponding author address: Seth I. Gutman, Chief, GPS-Met Observing Systems Branch, NOAA Forecast Systems Laboratory, 325 Broadway R/FS3, Boulder, CO 80305-3328, U.S.A. Phone: 303-497-7031. FAX: (303) 497-6014. E-Mail: [email protected] , Web:http://gpsmet.noaa.gov 1-12-1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Rapid Retrieval and Assimilation of Ground Based GPS-Met Observations at the
NOAA Forecast Systems Laboratory: Impact on Weather Forecasts
Seth I. Gutman1, Kirk L. Holub2, Susan R. Sahm1, Jebb Q. Stewart2, Tracy Lorraine Smith3, Stanley G. Benjamin4, and Barry E. Schwartz4
NOAA Forecast Systems Laboratory, Boulder, Colorado USA
Abstract
This year, 2003, marks the tenth anniversary of ground-based Global Positioning System meteorology. GPS-Met as we now know it started in 1992 with the definition of the essential techniques to retrieve integrated (total column) precipitable water vapor (IPW) from zenith-scaled neutral atmospheric signal delays (Bevis et al., 1992). It culminated with the GPS/Storm experiment in 1993, which demonstrated the ability to make IPW measurements with about the predicted accuracy under warm-weather conditions (Rocken et al., 1995). Since then, most of the major advances in GPS-Met data processing have been in the form of improved mapping functions (Niell, 1996), the estimation of GPS signal delays in an absolute (Duan et al., 1996) versus a relative sense (Rocken et al., 1993), and improved GPS satellite orbit accuracy with reduced latency (Fang et al., 1998). Experiments with other GPS-Met data processing techniques, such as the estimation of line-of-sight GPS signal delays using a double-difference to zero-difference technique described by Alber et al. (2000) and Braun et al. (2001) are noted, but lingering questions about the validity of this approach (Gutman, 2002), and not the potential value of a slant-path measurements per se, (as enumerated by MacDonald and Xie, 2001 or Ha et al., 2002) have thus far precluded its routine implementation at the National Oceanic and Atmospheric Administration Forecast Systems Laboratory (NOAA/FSL). Since 1994, NOAA/FSL has concentrated on evaluating the scientific and engineering bases of ground-based GPS-Met and assessing its utility for operational weather forecasting, climate monitoring, satellite calibration and validation, and improved differential GPS positioning and navigation. The term “rapid” in the title of this paper is defined as “available in time to be used for a specific application.” The requirement for high accuracy GPS-Met retrievals with lower latency is primarily driven by two factors: the trend toward shorter forecast cycles and higher spatial resolution in mesoscale numerical weather prediction (NWP) models, and the use by weather forecasters in subjective forecasting and/or model verification. GPS and ancillary surface meteorological observations, and improved satellite orbits, must be available on demand. Data processing hardware and techniques must provide GPS-Met retrievals in sufficient time to be assimilated into the current model cycle. Model data assimilation techniques must minimize the errors in estimating the initial state of a numerical forecast that come from spatial and temporal aliasing when interpolating discrete observations into an "analysis increment" field. While more GPS-Met retrievals can minimize horizontal aliasing, they can do little to minimize vertical aliasing that comes from assimilating any vertically integrated quantity (e.g. satellite radiances, zenith tropospheric signal delays, or GPS-IPW retrievals) into an NWP model. This is primarily because the forecast background error at a discrete vertical level must be estimated from the difference between observed and forecast integrated quantities. Absent the development of a new observing system or measurement technique, we must rely on improved data assimilation techniques, coupled with the more efficient use of complementary observing systems, to improve the three-dimensional description of moisture in the atmosphere. NOAA/FSL has conducted data denial experiments since 1998 to determine the statistical impact that GPS-IPW retrievals have on 3-hour moisture and precipitation forecasts in the central United States. Results from 5-years of experiments indicate more or less continuous improvement in forecast skill as the GPS-Met network expands. Improvements are observed in relative humidity forecast accuracy at all levels below 500 hPa, and all precipitation levels above “trace”. The impact steadily decreases with the length of the forecast; it is usually substantial from 0-3 hours, and negligible from 6-12 hours. The largest impacts usually occur during active weather, and usually manifest themselves as changes in the locations of boundaries such as fronts and dry lines. ___________________ 1 NOAA Research-Forecast Systems Laboratory R/FS3, Boulder, Colorado. 2 NOAA Research-Forecast Systems Laboratory R/FS3, Boulder, Colorado. Contract with Systems Research Group, Inc. (SRG),
Colorado Springs, Colorado. 3 NOAA Research-Forecast Systems Laboratory R/FS1, Boulder, Colorado. In collaboration with the Cooperative Institute for
Research in the Atmosphere (CIRA), Colorado State University, Fort Collins, Colorado. 4 NOAA Research-Forecast Systems Laboratory R/FS1, Boulder, Colorado U.S.A.. Corresponding author address: Seth I. Gutman, Chief, GPS-Met Observing Systems Branch, NOAA Forecast Systems Laboratory, 325 Broadway R/FS3, Boulder, CO 80305-3328, U.S.A. Phone: 303-497-7031. FAX: (303) 497-6014. E-Mail: [email protected], Web:http://gpsmet.noaa.gov
1-12-1

1.0 INTRODUCTION Starting in 1994, the NOAA Forecast Systems Laboratory (NOAA/FSL) in Boulder Colorado began a long-term scientific and engineering evaluation of the utility of ground-based GPS retrievals of integrated or total atmospheric column precipitable water vapor (IPW) estimates for weather forecasting, climate monitoring, and other applications. The work started in 1993 with the University Corporation for Atmospheric Research and North Carolina State University using techniques articulated by Bevis et al. (1992). It has grown over time to include collaborations with numerous university and governmental organizations. As described in Wolf and Gutman (2000), the evaluation of ground-based GPS-Met considered water vapor retrieval accuracy, error covariance, and sensitivity to weather conditions. We also evaluated engineering and environmental requirements, systems integration, remote monitoring, quality control, field maintenance and integrated logistic support. We believe there have been four major innovations that have advanced ground-based GPS-Meteorology from the status of a nuisance parameter in high accuracy positioning to a new upper-air moisture observing system. The first is the GPS-STORM experiment in 1993, which demonstrated the ability to make accurate measurements of integrated precipitable water vapor under a variety of weather conditions (Rocken et al., 1995). The second was the development of absolute data processing techniques (Duan et al., 1996) that freed us from having to use collocated microwave water vapor radiometers or other similar observations to make GPS water vapor estimates. The third was the development of the International GPS Service (IGS) Rapid Orbit in 1996. The Rapid Orbit (with 1-day vs. 2-week latency for the IGS Precise Orbit) made it possible to perform GPS data denial experiments in a routine fashion starting in 1997. Finally, the development of the hourly orbit and sliding window processing technique (Peng et al., 2002) allowed us to reduce the time needed to produce water vapor estimates from 18-hours to about one-half hour (or potentially less) without significantly degrading water vapor retrieval accuracy over that achieved using a rapid orbit (Gutman et al., 2000). While the latter achievement removed the last technical impediment to operational implementation of GPS-Met within the U.S. National Weather Service, programmatic questions (e.g. funding, system tradeoffs, network expansion, and long-term operations and maintenance issues) now dominate the decision making process within NOAA. 2.0 DATA ACQUISITION Operational weather agencies have begun to implement NWP models with higher horizontal and vertical resolution, and initialize them more
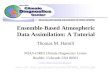
frequently, to support applications such as transportation and severe weather forecasts. Higher frequency data assimilation drives the need for more timely observations within and “up-stream” of the model domain. Data must also be available with minimal latency to be useful for other applications including diagnostic algorithms (Mazany et al., 2002), data fusion (Keighton et al., 2003), model verification, and general subjective forecasting. At this time, the most frequently initialized U.S. National Weather Service model is the Rapid Update Cycle or RUC (Benjamin et al., 2002). The RUC provides analyses (i.e. initial state estimates using data assimilation) and forecasts every hour at a horizontal resolution that is currently 20 km. Mesoscale models such as the RUC 20 describe weather phenomena at a size-scale somewhat larger than most thunderstorm-scale systems, but smaller than synoptic features such as tropical storms. The RUC 20 generates a new analysis using the latest observations combined with a previous 1-hour forecast. Each hour, the RUC ingests data from a large number of observing systems (Table 1) and uses them to forecast the weather up to 12 hours in the future using the scheme illustrated in Figure 1. Table 1 shows that the state of the atmosphere over North America is actually defined by a composite observing system, with each system providing only partial information. Even with this composite observing system, the state of the atmosphere in the data rich United States is still heavily underdetermined, with many fewer observations than the number of grid points, and where additional information is needed to constrain a solution. We currently acquire GPS and ancillary meteorological observations in near real-time from more than 200 sites belonging to 35 organizations including U.S. federal, state, and local government agencies, universities and private companies (Figure 2). Data are assimilated into the RUC and Local Analysis and Prediction System (LAPS) models every hour, and are made available for assimilation into other NWP models including CSU/RAMS, CAPS/ARPS, MM5, and the Community WRF model under development. The sites are partitioned into two categories of continuously operating reference stations: backbone sites and infill sites. Backbone sites provide an assured source of high quality GPS-Met observations to NOAA. They are operated by (or on behalf of) various U.S. federal government agencies, are monitored and maintained as operational systems, have dedicated communications, and collocated surface meteorological sensors. Infill sites provide the essential network densification. They belong to other agencies or organizations, and are not generally maintained as operational systems. Infill sites may or may-not have collocated meteorological sensors. Those that do not have automated surface weather
1-12-2

Observing System ~Number Freq. In Use AtRawinsonde (including special obs) 80 12h NCEP & FSLNOAA 405 MHz wind profilers 31 1h NCEP & FSLBoundary-layer 915 MHz wind profilers 24 1h NCEP & FSLRASS virtual temperatures 10 1h NCEP & FSLVAD winds (WSR-88D radars) 110-130 1h NCEP & FSLACARS (wind/temp) 1400-4500 1h NCEP & FSLSurface METAR reports 1500-1700 1h NCEP & FSLSurface mesonet reports 2500-4000 1h NCEP & FSLBuoys 100-150 1h NCEP & FSLGOES precipitable water 1500-3000 1h NCEP & FSLGOES cloud drift winds 1000-2500 1h NCEP & FSLGOES cloud top pres/temp ~10 km res. 1h NCEP & FSLSSM/I precipitable water 1000-4000 1h NCEP OnlyGPS precipitable water 200 1h FSL, NCEP by 03/03
TABLE 1. Observations currently used by the RUC
ations nearby from which pressure and temperature
S and ancillary t
rchitectures unnecessary. Typically, organizations eed only configure firewalls to have their data
ur and is normally completed within 3 to m
12 hr. fcst
3 hr . fcst
00 01 02 03 04 05 06 07 08 09 10 11 12 (UTC)
Analysis times
3 hr. fcst
12 hr. fcst To 15Z
3 hr . fcst3 hr . fcst
12 hr. fcst To 18Z
3 hr. fcst3 hr. fcst
12 hr. fcst
3 hr. fcst3 hr. fcst
To 21Z
1 hr. 1 hr. 1 hr. 1 hr. 1 hr. 1 hr. 1 hr. 1 hr . 1 hr. 1 hr. 1 hr. 1 hr.
DATA DATA DATA DATA DATA DATA DATA DATA DATA DATA DATA DATA DATA
fcst fcst f cst fcst fcst fcst fcst fcst fcst fcst fcst fcst
To 12Z
FIGURE 1. Data ingest, analysis, and forecast cycle for the Rapid Update Cycle (RUC-2) NWP Model.
astnmeasurements can be acquired in real time,
interpolated to the horizontal and vertical location of the GPS antenna as described by Gutman et al., 2003, and used to parse the GPS tropospheric signal delays into their wet and dry components. The ability to acquire GP
acquired integrated into the GPS-Met network. A schematic GPS-Met data flow diagram is presented in Figure 3. GPS data acquisition begins at 2 and 32 minutes after the ho4 inutes using media ranging from dedicated land-lines at NOAA and NDGPS CORS, to the internet using HTTP, FTP, and SCP protocols. Once the GPS and surface met observations are received, they are decimated to 30-second epochs for GPS, 5-minute averages for met, and written into RINEX2 format files using the International GPS Service file name convention. These files are then shipped to the processing system via an NFS exported file system.
me eorological observations from diverse GPS receivers and antennas belonging to numerous organizations was incorporated into the redesign of the GPS-Met data acquisition and processing system in 2000. An attribute of the redesigned system is that the data distribution methods and file naming conventions of disparate organizations can be accommodated without requiring these organizations to make any changes to their existing system
1-12-3

Figure 2. NOAA/FSL GPS-Met Network current as of 12-06-02 .
Determination of ZTD and its gradient is accomplished using GAMIT software developed by the Massachusetts Institute of Technology (MIT) in collaboration with the Scripps Institution of Oceanography. Input data required by GAMIT are the raw GPS observations, earth orientation parameters, and two-hour orbit predictions from the hourly GPS satellite orbit product generated by the Scripps Orbit and Permanent Array Center (SOPAC). The number of calculations required to estimate signal delays is proportional to the square of the number of sites being processed. Therefore, for the purposes of data processing, the GPS-Met network is logically divided into ‘sub-networks’ each consisting of 15 to 25 sites, depending on the speed of the processing node.
FSL & NWSCORS
NDGPS CORS(USCG, ACOE,
USDOT)FSL
NGS CORS
NGS
COOPERATIVECORS
SOUMINETCORS
FAA WAASCORS
OTHERAGENCY
CORS
NGS MIRRORSITE @ NGDC
SOPACIGS ORBITS
USNO UT, POLE
NWSTGMADIS
NWP MODELSWFO’S
CAL/VALRESEARCH
FSL & NWSCORS
NDGPS CORS(USCG, ACOE,
USDOT)FSL
NGS CORS
NGS
COOPERATIVECORS
SOUMINETCORS
FAA WAASCORS
OTHERAGENCY
CORS
NGS MIRRORSITE @ NGDC
SOPACIGS ORBITS
USNO UT, POLE
NWSTGMADIS
NWP MODELSWFO’S
CAL/VALRESEARCH
Figure 3. Schematic GPS data flow diagram.
Data processing is event driven. It begins about 6 and 36 minutes after the hour, depending on the time that data acquisition is completed. Data from each sub-network is processed on a different node (consisting of a PC with a single Intel Pentium 4 processor) and signal delay estimates are typically available between 12 and 15 minutes after the hour. This large variation of the completion times depends on the characteristics of the PC being used and the number of sites in the sub-network.
3.0 DATA PROCESSING The number of calculations made by GAMIT to
estimate the zenith tropospheric signal delays is proportional to the square of the number of sites being processed. To minimize data processing time, the GPS-Met network is divided into ‘sub-networks’ each consisting of 15 to 25 sites, including four IGS fiducial sites located at the far corners of the U.S.
GPS-Met data processing involves three distinct steps: estimating the zenith-scaled tropospheric delay (ZTD) and gradient; computing the wet-delay mapping function (using surface temperature and the technique described by Bevis et al., 1992, or the mean temperature estimated from a NWP model as described in Gutman et al., 2003) and retrieving IPW; and evaluating the IPW retrieval using physical quality control metrics.
The use of any geodetic processing software for operational GPS meteorology requires a certain amount of tailoring, and GAMIT is no exception.
1-12-4

The end products of geodetic processing software are site position and velocity. Processing is normally carried out in daily solutions, where tropospheric, ionospheric, and multipath errors are modeled and/or generally average out. In GPS meteorology, ZTD’s (and their gradients) normally estimated as nuisance parameters and removed are the end product(s). The high temporal resolution of near real-time GPS virtually guaranties that these parameters will not average out in a short period (say 30-minutes or less) and will therefore appear as biases in the ZTD or its gradient. As a consequence, care must be given to identify and remove errors as described in Fang et al. (1998b), but it is also possible to “over-process” these data and remove atmospherically valid signals imbedded in modeled noise such as multipath. We have found that the use of an 8-hour (16-session) “sliding window” is adequate to produce a solution of comparable or slightly better accuracy to a daily solution when the median value of the 16 solutions is computed (Fang et al., 1998a). The implementation of the sliding window technique is straight forward in practice. Initially data from 0000 (hour 00, minute 00) to 0800 are used. The result will be 16-ZTD estimates valid for times 0015, 0045, 0115, …, 0715, 0745. Thirty minutes later, data from 0030 to 0830 will be used. The result will be ZTD estimates valid at times 0045, 0115, 0145, …, 0745, 0815. Since the sliding window is always moving forward in time, GAMIT will produce 16 ZTD estimates valid for each time. The median of these estimates is the ZTD, and hence the IPW, reported by the GPS-Met system. After ZTD has been estimated, retrieving IPW is carried out using the algorithms developed by Saastamoinen (1972) and Bevis et al., 1992. Once an IPW estimate has been made, its validity is determined by applying quality control (QC) techniques. The validity of an IPW estimate is based on four factors: were there a sufficient number of epochs observed in the current session; is the ZTD estimate physically realistic; is the estimate consistent with prior estimates; and is the RMS scatter in the estimates lower than the minimum IPW analysis error. All geodetic processing software estimating time varying parameters such as ZTD will estimate a parameter at a particular time, whether or not there was an observation to support it. Such data dropouts often occur due to communication problems. If there were no observations made during a given time period, the ZTD estimate for this period will not be used to calculate the median solution. Assuming that sufficient data were available during a given time period, and GAMIT estimated a physically realistic ZTD value, the precision of the estimate is checked by examining the ‘formal error’ (FERR) value. For the purposes of GPS-Met at NOAA/FSL, the FERR constraint is established as 1.2 cm in the conterminous U.S., a value which corresponds to approximately 2 mm of IPW. If a ZTD estimate’s FERR value exceeds this, the
corresponding IPW is identified as questionable, and will not be distributed or displayed unless the user specifically requests it. 4.0 Data Delivery Data delivery is one of the most critical components of any meteorological observing system. Unless GPS-IPW retrievals and surface meteorological observations are available to modelers and forecasters in a timely fashion, they have very limited utility in operational weather forecasting. Currently, we provide GPS-Met retrievals every 30-minutes to the 20-km Rapid Update Cycle (RUC-20) and 13-km Local Analysis and Prediction System (LAPS) running at FSL in Boulder, Colorado. Assimilation into operational models running at the National Centers for Environmental Prediction (NCEP) in Camp Springs, Maryland is scheduled to start in the second quarter of 2003. GPS retrievals are available to operational forecasters via the NOAAPORT in the form of ‘ISTX40 KBOU’ messages, the Meteorological Assimilation Data Ingest System (MADIS), as delimited ASCII files available for ingest via the Local Data Acquisition and Dissemination (LDAD) system at each forecast office, and from the World Wide Web at http://gpsmet.noaa.gov. 5.0 Impact on Weather Forecasts Despite the limitations identified in the introduction to this paper, modern numerical weather prediction models do a fairly good job in describing the moisture field even under conditions of moderately active weather. For example, Figure 4 illustrates typical variations in total precipitable water vapor over North America as estimated by the RUC running at 40-km horizontal resolution. The time difference between Figures 2a and 2b is only 1 hour, but Figure 2b includes data from approximately 85 rawinsonde soundings that were not available at 2300 UTC the previous day. Despite the considerable volume of new moisture observations contained in Figure 2b, the changes in the overall field are not substantial. Note the similar appearance in the main contrast zone along a front that runs from western Texas northeastward through the Great Lakes. Figure 2c is a 12-hour forecast, initialized at 0000 UTC, that gives a sense of how much the total precipitable water field is expected to change over the next 12-hours. More intense variations may occur, however, with strong storm development or rapidly moving fronts. We have found that NWP moisture forecasts are slightly more accurate in the winter than in summer months, and more accurate in the interior of the continent than along the coasts. The root mean square (RMS) difference in total precipitable water between 3-h RUC forecasts and GPS observations is typically less than 3 mm for all but coastal stations
1-12-5

2c. 12-h FCST Valid 1200Z 24-SEP-00
2a. Analysis Valid 2300Z 23-SEP-00 2b. Analysis Valid 0000Z 24-SEP-00
FIGURE 4. Total precipitable water vapor fields generated by the Rapid Update Cycle (RUC-2) numerical weather prediction model running at 40-kilometer horizontal resolution. From top to bottom: 2a) analysis valid 23 SEP 2001 at 2300 UTC; 2b) analysis valid at 24 SEP 2001 at 0000 UTC; 2c) 12-hour forecast valid at 24 SEP 2001 at 1200 UTC. Contour interval is 2 mm.
2c. 12-h FCST Valid 1200Z 24-SEP-00
2a. Analysis Valid 2300Z 23-SEP-00 2b. Analysis Valid 0000Z 24-SEP-00
2c. 12-h FCST Valid 1200Z 24-SEP-00
2a. Analysis Valid 2300Z 23-SEP-00 2b. Analysis Valid 0000Z 24-SEP-00
FIGURE 4. Total precipitable water vapor fields generated by the Rapid Update Cycle (RUC-2) numerical weather prediction model running at 40-kilometer horizontal resolution. From top to bottom: 2a) analysis valid 23 SEP 2001 at 2300 UTC; 2b) analysis valid at 24 SEP 2001 at 0000 UTC; 2c) 12-hour forecast valid at 24 SEP 2001 at 1200 UTC. Contour interval is 2 mm.
(Benjamin et al. 1998). At coastal sites, this RMS difference, mostly due to forecast model inaccuracy probably associated with the paucity of observations offshore, was 4-5 mm. These model PWV accuracy results for the RUC over the United States are in close agreement with those estimated with a regional mesoscale model in Europe (Yang et al. 1999). Generally, in order for observations to have a chance to produce improved forecasts, the observations must have an observational error somewhat less than that of the a priori information in the previous forecast. This suggests that the required accuracy for GPS PWV observations is 1.0-1.5 mm for the interior United States, and perhaps 2.0-2.5 mm for coastal locations where forecast error is typically higher. See Smith et al. (2001) for a further discussion of the required accuracy for GPS-IPW retrievals. Observation sensitivity experiments on the impact of GPS PWV observations have been carried out with the RUC over the last five years. The data denial experiments used parallel versions of the RUC at 60-km horizontal resolution with 3-hour assimilation cycles. One cycle used all available observations identified in Table 1, and the other excluded GPS-IPW. 3-hour forecasts from the two cycles were verified against independent rawinsonde
observations of relative humidity at five pressure levels: 850 hPa, 700 hPa, 500 hPa, 450 hPa, and 300 hPa. The number of GPS-Met stations used in the experiment remained constant at 18 between 1998 and 1999, and then increased to 56 in 2000, 70 in 2001, and to more than 100 in 2002. Table 2 summarizes the results from a large number of cases (857 for 98-99, 421 for 2000, 427 for 2001, and 592 for 2002) analyzed over the last five years. All days with a successful verification contributed to the arithmetic average, no matter what the weather regime. This method of analysis tends to mute the effect of the observing system, since under quiet weather conditions, the model tends to be quite accurate and the differences between the observations and forecasts tend to be negligible. Note that the numbers for the control runs are similar in all years, but the runs with GPS had a stronger positive signal between 2000 and 2002. We attribute this to the increased number of stations, since all other factors including the computer CPU, code, and assimilation technique used have remained essentially constant over the five years of the experiment. An alternate way of looking at the results presented in Table 2 is by binning them according to whether they were better, worse or the same with the GPS data. In Table 3, we concentrate on the 850 hPa
1-12-6

Level 1998-1999 2000 2001 2002 = Control 2002 - with GPS 2002 --------------------------------------------------------------------- 850 .15 .38 .39 .50 14.26 13.76 700 .11 .41 .63 .65 16.43 15.78 500 .07 .21 .20 .24 18.07 17.83 400 .03 .01 -.04 -.05 18.54 18.59 300 .01 .01 -.12 -.25 17.84 18.09
Table 2. Comparison of five years of GPS impact on RH forecasts in the 60km RUC. Numbers are forecast-RAOB for RH in %.
Table 3. Verification results presented in Table 2, binned by wh ether they were better, worse or the same with GPS data. 850mb 1998 1999 2000 2001 2002 (# cases/2002) ----------------------------------------------------------Better 25% 28% 37% 38% 45% (266) Worse 21% 19% 23% 24% 26% (152) Same 54% 53% 40% 38% 29% (174) (74% same/better)
700mb 1998 1999 2000 2001 2002 (# cases/2002) ----------------------------------------------------------Better 23% 27% 39% 49% 52% (310) Worse 21% 21% 21% 18% 20% (119) Same 56% 52% 40% 33% 28% (163) (80% same/better)
and 700 hPa levels since they exhibit the most impact. We note that since the percentage of negative impact cases remains relatively constant over the five-year period, having more GPS observations is clearly “amplifying” the positive impact signal that scored “same” in the first two years. We believe that the majority of the negative impact in these cases comes from the method used to apply the single (integrated) value of the IPW observation over the vertical domain. Although it is widely believed that 3 and 4-D variational techniques will provide superior assimilation of integrated quantities such as IPW into NWP models, tests thus far have not resulted in any significant reduction in analysis error compared with conventional optimal interpolation (OI) techniques. The OI assimilation scheme involves three steps: (1) Determine PW background field (PWo); (2) Calculate the difference between the GPS IPW
retrieval and the model background; (3) Perform optimal interpolation analysis of IPW
correction to the background as follows:
int rpolation (OI) technique described in Smith et al., 2000, which assumes that the NWP model description (or shape) of the vertical precipitable water distribution is basically correct, but is in error by a constant percentage. If this assumption is not correct, then applying this technique will moisten or dry-out levels in an incorrect manner, resulting in a negative impact on forecast accuracy. Since the impact of the optimally interpolated GPS-IPW observations above 500 hPa is negligible or slightly negative, we believe that the OI assumption is less valid higher in the atmosphere. We have applied this to our 20km operational runs, and now limit the
In practice, we use the modified optimal e
Figure 5. Adjustment of MAPS moisture field using Optimal Interpolation.
- IPW% = PW correction / Pwo - qadj (k) = qo(k) * (1+IPW%) where q = water
vapor mixing ratio - Adjust for over or under-saturation in qadj - Perform the rest of analysis with other retrievals
using qadj from PW analysis as new q background field with the results illustrated in Figure 5.
1-12-7

effects of the GPS data to 500 hPa and below with reasonably good results.
0 1 2 3 4 5 6 7 8 9 10 11 12 13Month (2002)
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
8
9
10
% Im
prov
emen
t in
RH
For
ecas
ts
2002 RUC-60 PRESSURE LEVELS
850 Mb700 Mb500 Mb400 Mb
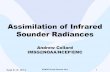
Figure 8. Percent improvement (normalized by total error) for 3-h RUC relative humidity forecasts from assimilation of GPS-IPW retrievals for 2002. Four different atmospheric levels shown.
Figures 6-8 present the RH impact results for 850 hPa through 300 hPa for the years 2000-2002, respectively. Percent improvement is defined as: 100 * (3h RH Forecast Error with GPS - 3 h RH Forecast Error w/o GPS) / (3 h RH Forecast Error w/o GPS). In general, we can see a general tendency toward improved RH forecasts during the cold months when moisture variability is greatest.
Figure 6. Percent improvement (normalized by total error) for 3-h RUC relative humidity forecasts from assimilation of GPS-IPW retrievals for 2000. Four different atmospheric levels shown.
0 1 2 3 4 5 6 7 8 9 10 11 12 13Month (2000)
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
8
9
10
% Im
prov
emen
t in
RH
For
ecas
ts
RUC-60 PRESSURE LEVELS 2000
850 Mb700 Mb500 Mb400 Mb
Figure 9 summarizes the 24-hour precipitation
verification for thresholds between “trace” and 2.00 inches between 2000 and 2002.
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
50
55
Num
bero
fCas
esin
2001
24-Hour Precipitation VerificationEquitable Threat Score
Better with GPSWorse with GPSNo Change
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
50
55
Num
bero
fCas
esin
2001
24-Hour Precipitation VerificationEquitable Threat S
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
50
55
Num
bero
fCas
esin
2001
24-Hour Precipitation VerificationEquitable Threat Score
Better with GPSWorse with GPSNo Change
1 2 3 4 5 624-hAccumulatedPrecipitation(inches)
0
5
10
15
20
25
30
35
40
Num
bero
fCas
es
24-HourPrecipitationVerificationProbabilityofDetection
Better with GPSWorse with GPSNo Change
0.01" 0.10" 0.25" 0.50" 1.00" 1.50"1 2 3 4 5 6
24-hAccumulatedPrecipitation(inches)
0
5
10
15
20
25
30
35
40
Num
bero
fCas
es
24-HourPrecipitationVerificationProbabilityofDetection
Better with GPSWorse with GPSNo Change
1 2 3 4 5 624-hAccumulatedPrecipitation(inches)
0
5
10
15
20
25
30
35
40
Num
bero
fCas
es
24-HourPrecipitationVerificationProbabilityofDetection
Better with GPSWorse with GPSNo Change
0.01" 0.10" 0.25" 0.50" 1.00" 1.50"1 2 3 4 5 6
24-hAccumulatedPrecipitation(inches)
0
5
10
15
20
25
30
35
40
45
Num
bero
fCas
es
24-HourPrecipitationVerificationBias
Less with GPSMore with GPSNo Change
0.01" 0.10" 0.25" 0.50" 1.00" 1.50"1 2 3 4 5 6
24-hAccumulatedPrecipitation(inches)
0
5
10
15
20
25
30
35
40
45
Num
bero
fCas
es
24-HourPrecipitationVerificationBias
Less with GPSMore with GPSNo Change
01 2 3 4 5 6
24-hAccumulatedPrecipitation(inches)
0
5
10
15
20
25
30
35
40
45
Num
bero
fCas
es
24-HourPrecipitationVerificationBias
Less with GPSMore with GPSNo Change
0.01" 0.10" 0.25" 0.50" 1.00" 1.50"1 2 3 4 5 6
24-hAccumulatedPrecipitation(inches)
0
5
10
15
20
25
30
35
40
45
50
55
Num
bero
fCas
es
24-HourPrecipitationVerificationEquitableThreatScore
Better with GPSWorse with GPSNo Change
0.01" 0.10" 0.25" 0.50" 1.00" 1.50"1 2 3 4 5 6
24-hAccumulatedPrecipitation(inches)
0
5
10
15
20
25
30
35
40
45
50
55
Num
bero
fCas
es
24-HourPrecipitationVerificationEquitableThreatScore
Better with GPS
1 2 3 4 5 624-hAccumulatedPrecipitation(inches)
0
5
10
15
20
25
30
35
40
45
50
55
Num
bero
fCas
es
24-HourPrecipitationVerificationEquitableThreatScore
Better with GPSWorse with GPSNo Change
0.01" 0.10" 0.25" 0.50" 1.00" 1.50"
EQTS 2000 POD 2000 Bias 2000
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
Num
bero
fCas
esin
2001
24-Hour Precipitation VerificationPr obabilityof Detection
Better with GPSWorse with GPSNo Change
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
Num
bero
fCas
esin
2001
24-Hour Precipitation VerificationPr obabilityof Detection
Better with GPSWorse with GPSNo Change
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
Num
bero
fCas
esin
2001
24-Hour Precipitation VerificationPr obabilityof Detection
Better with GPSWorse with GPSNo Change
0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”
2000
2000
2000
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
Num
bero
fCas
esin
2001
24-Hour PrecipitationVerificationBias
Less with GPSMore with GPSNo Change
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
Num
bero
fCas
esin
2001
24-Hour PrecipitationVerificationBias
Less with GPSMore with GPSNo Change
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
Num
bero
fCas
esin
2001
24-Hour PrecipitationVerificationBias
Less with GPSMore with GPSNo Change
0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”
EQTS 2001 POD 2001 Bias 2001
EQTS 2000 POD 2000 Bias 2000
0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”0.01” 0.10” 0.25” 0.50” 1.10” 1.50” 2.00”
Figure 9. 24-hour precipitation forecast verification statistics for 2000-2002. In each bar chart, red represents the improvement in forecast skill, blue is worse skill, and gray is no change. The metrics are equitable threat score (EQT), probability of detection (POD) and bias.
24-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
85
90
Num
ber o
f Cas
es in
200
2
24-Hour Precipitation VerificationEquitable Threat Score
Better with GPSWorse with GPSNo Change
0.01 0.10 0.25 0.50 1.00 1.50 2.00 3.0024-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
50
55
Num
ber o
f Cas
es in
200
2
24-Hour Precipitation VerificationProbability of Detection
Better with GPSWorse with GPSNo Change
0.01 0.10 0.25 0.50 1.00 1.50 2.00 3.0024-h Accumulated Precipitation (inches)
0
5
10
15
20
25
30
35
40
45
50
55
Num
ber o
f Cas
es in
200
2
24-Hour Precipitation VerificationBias
Less with GPSMore with GPSNo Change
0.01 0.10 0.25 0.50 1.00 1.50 2.00 3.00
E Q T S 2 0 0 1P O D 2 0 0 1 B i a s 2 0 0 1
0 1 2 3 4 5 6 7 8 9 10 11 12 13Month (2001)
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
8
9
10
% Im
prov
emen
t in
RH
For
ecas
ts
2001 RUC-60 PRESSURE LEVELS
850 Mb700 Mb500 Mb400 Mb
Percent Improvement in RH Forecast is defined as:1-(3 h RH Forecast Error with GPS/3 h RH Forecast Error w/o GPS)*100
Figure 7. Percent improvement (normalized by total error) for 3-h RUC relative humidity forecasts from assimilation of GPS-IPW retrievals for 2001. Four different atmospheric levels shown.
In 2000, we observed improvements at all levels above “trace”. In 2001, the improvements were observed for all levels above 0.25”. In 2002, we observed degradation in the equitable threat score
1-12-8

7.0 References (EQTS) from “trace” through 0.50”, improvements above that threshold. Although the verification for the 2.00” threshold was better with GPS, there was only one case, so the result is not significant. Although we saw improvements in the probability of detection (POD) and bias at all levels, we also saw a small increase in the false alarm rate (FAR) that is being investigated.
Alber, C., R. Ware, C. Rocken, J. Braun, 2000. Obtaining single path phase delays from GPS double differences, Geophys. Res. Lett., 27(17), 2661-2664. Benjamin, S.G., S.S. Weygandt, B.E. Schwartz, T.L. Smith, T.G. Smirnova, D. Kim, G. Grell, D. Devenyi, K.J. Brundage, J.M. Brown, and G.S. Manikin, 2002. The 20-km RUC in operations, reprints, 15th Conf. on Numerical Weather Prediction, San Antonio, TX, Amer. Meteor. Soc., 379-382.
6.0 Conclusions The assimilation of GPS integrated precipitable water vapor retrievals into a numerical weather prediction model such as the Rapid Update Cycle generally improves the 3-hour prediction of the vertical moisture field at all levels below 500 hPa, and precipitation forecasts for the heavier rainfall events. While the magnitude of the improvement in absolute terms is modest (0.5% in 2002), it must be remembered that this number represents the un-weighted arithmetic average from all weather events over the entire year. When the state of the atmosphere is well determined, little or no improvement in forecast accuracy is expected or observed. Although the greatest impact is observed during active weather conditions, the undifferentiated mean improvement is close to zero because these events are in the minority. As a consequence, we consider the relative improvement in RH forecast skill of 5-8% to be quite significant, all things considered.
Bevis M., S. Businger, T.A. Herring, C. Rocken, R.A. Anthes and R.H. Ware, 1992. GPS Meteorology: remote sensing of atmospheric water vapor using the Global Positioning System, J. Geophys Remote Sensing of Atmospheric Water Vapor. Res., 97, 15787-15801.
Braun, J., C. Rocken, and R. Ware, 2001. Validation of Line-of-Sight Water Vapor Measurements with GPS, Radio Science, V.36, 3, 459-472.
Duan, J., M. Bevis, P. Fang, Y. Bock, S. Chiswell, S. Businger, C. Rocken, F. Solheim, T. VanHove, R. Ware, S. Mc Clusky, T.A. Herring, and R.W. King, GPS Meteorology: Direct Estimation of the Absolute Value of Precipitable Water, 1996. J. of Applied Met., Vol. 35, No. 6, 830-838.
What is most surprising, however, is that GPS-Met retrievals have any positive impact on weather forecast accuracy at all. Consider the fact that the number of satellite-derived moisture estimates assimilated into the RUC exceeds the number of GPS retrievals by about an order of magnitude. We believe the reason that for this is that the total number of observations is less important than having a sufficient number of observations where and when they are needed to describe the current and changing state of the moisture field. The best example of this is under cloudy conditions when satellites cannot obtain good radiance measurements but where, from a forecasting perspective, the need for accurate measurements is greatest since areas of precipitation are also cloudy. The all-weather high temporal frequency capability of GPS appears to be making the difference.
Fang, P. and Y. Bock, 1998a. Sliding Window
Procedure for Super Near Real-time Continuous GPS Water Vapor Estimation Using Predicted Orbits, Supp. To Annals Geophysicae, 16, C379.
Fang, P., M. Bevis, Y. Bock, S. Gutman and D. Wolfe, 1998b. GPS meteorology: Reducing systematic errors in geodetic estimates for zenith delay. Geophys. Res. Lett., 25, No. 19, 3583-3586.
Gutman, S.I., S. Sahm, J. Stewart, S. Benjamin, and T. Smith, 2003. A New Composite Observing System Strategy for GPS Meteorology. 12th Symposium on Meteorological Observations and Instrumentation, 5.2, AMS, Long Beach, CA.
Gutman, S.I., 2002. On the Operational Use of Slant-Path Measurements, 6th Symposium on Integrated Observing Systems (IOS) 1.2, AMS, Orlando, FL, 13-17 Jan, 2002.
We also speculate that much of the information acquired by ground-based GPS-Met sensors is essentially useless to the current generation of mesoscale models because of temporal and spatial aliasing. Weather forecasters, however, can and do integrate this information very effectively, and we believe that much can be learned by trying to emulate this process objectively.
Gutman, S.I., T.L. Smith, K.L. Holub, M. Foy,
S.G. Benjamin, and B. Schwartz, Status of Ground-Based GPS Meteorology at NOAA’s Forecast Systems Laboratory, COST Action 716 Workshop 10 - 12 July, 2000 Soria Moria, Oslo, Norway.
1-12-9

1-12-10
Ha, S.-Y., Y.-H. Kuo, Y.-R. Guo, and G.H. Lime, 2002. Assimilation of Ground-Based GPS Slant-Path Water Vapor Measurements and its Impact on Short-Range Prediction of a Pre-Frontal Squall Line, Third U.S.-Korea Joint Workshop, Boulder, CO, February, 2002.
Keighton, S.J., M. Gillen, G.V. Loganathan, S. Gorugantula, and T. Eisenberger, 2003. The Use Of GPS Integrated Precipitable Water Measurements to Supplement WSR-88d Parameters in Determining The Potential for Flash Flood Producing Rainfall, 9th Conference on Mesoscale Processes, P5.14, AMS Long Beach, CA. MacDonald, A.E and Y. Xie, 2001. On the use of slant observations from GPS to diagnose three dimensional water vapor using 3DVAR, A. E. MacDonald and Yuanfu Xie, Fourth Symposium on Integrated Observing Systems, AMS 2000, Long Beach, California. 62-73.
Mazany, R., S. Businger, S. Gutman, and W. Roeder, 2002. A lightning prediction index that utilizes GPS integrated precipitable water vapor, Wea and Forecasting, 17, 1034-1047.
Niell, A.E., Global mapping functions for the atmospheric delay at radio wavelengths, 1996. J. Geophys. Res., 101,3227-3246.
Rocken, C., T. Van Hove, J. Johnson, F. Solheim, R. H. Ware, M. Bevis, S. Businger, S. Chiswell, 1995. GPS/STORM - GPS Sensing of Atmospheric Water
Vapor for Meteorology, Journal of Atmos. and Ocean. Tech., Vol. 12, No. 3, 468-478.
Rocken, C, R Ware, T Van Hove, F Solheim and
C Alber, Sensing atmospheric water-vapor with the Global Positioning System, 1993. Geophys Res Lett, 20(23), 2631-2634.
Saastamoinen, J., 1972. Introduction to practical
computation of astronomical refraction, Bull. Geod., 106, 383-397.
Smith, T.L., S.G Benjamin, B.E. Schwartz, and S.I. Gutman, 1999. Using GPS-IPW in a 4D Data Assimilation System, The International Symposium on GPS Application to Earth Sciences (GPS'99 in Tsukuba), October 18-22, Tsukuba, Ibaraki, Japan.
Smith, T.L., S.G. Benjamin, B.E. Schwartz, B.E., and S.I. Gutman, 2000. Using GPS-IPW in a 4-D data assimilation system. Earth, Planets and Space, 52, 921-926.
Wolfe, D.E. and S.I. Gutman, 2000. Development of the NOAA/ERL Ground-Based GPS Water Vapor Demonstration Network: Design and Initial Results, J. Atmos. Ocean. Technol, 17, 426-440.
Yang, X., Sass, B.H., Elgered, G., Johansson, J.M. and Emardson, T.R. (1999). A comparison of precipitable water vapor estimates by an NWP simulation and GPS observations, Monthly Weather Review, 38, pp. 941-956.
Related Documents