RANCANG BANGUN UNIT KONTROL BERESOLUSI 12 Bit ALAT UKUR KETEGAKLURUSAN Oleh: GRANDIS ABAS SANIRTA ( 2108 100 517 ) Dosen Pembimbing: Prof. Dr.Ing. I Made Londen Batan, M.Eng

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
RANCANG BANGUN UNIT KONTROL BERESOLUSI 12 Bit ALAT UKUR
KETEGAKLURUSAN
Oleh:
GRANDIS ABAS SANIRTA ( 2108 100 517 )
Dosen Pembimbing:
Prof. Dr.Ing. I Made Londen Batan, M.Eng
PEMBAHASAN • LATAR BELAKANG
• PERUMUSAN MASALAH
• TUJUAN PENELITIAN
• BATASAN MASALAH
• TINJAUAN PUSTAKA
• METODOLOGI
• PERANCANGAN DAN PEMBUATAN UNIT KONTROL
• KALIBRASI DAN VALIDASI
• UJI COBA PENGUKURAN
• KESIMPULAN DAN SARAN
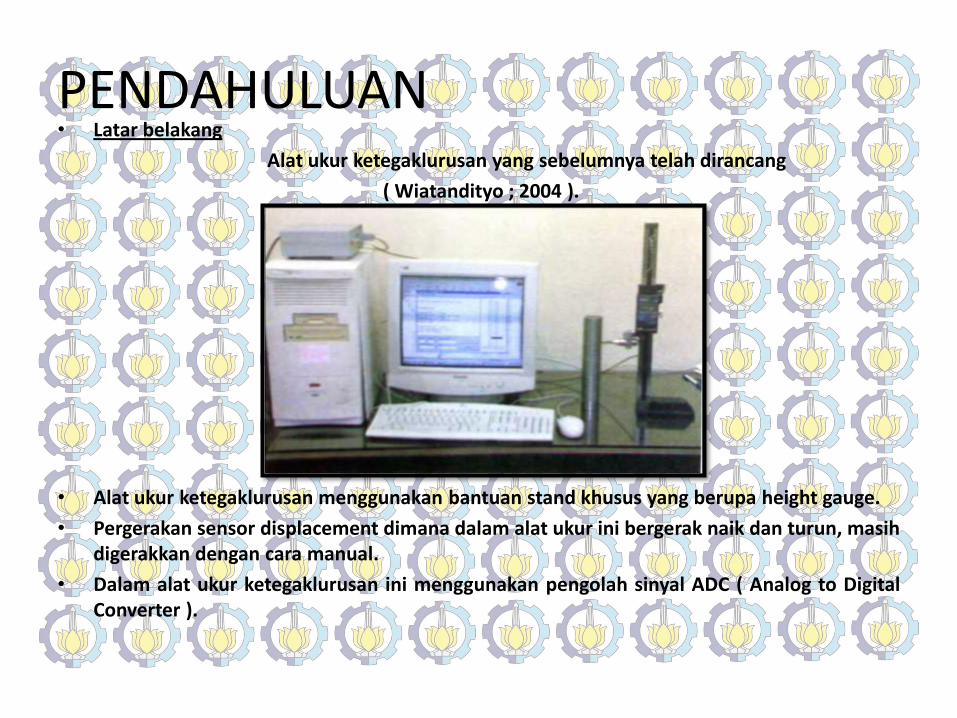
PENDAHULUAN • Latar belakang
Alat ukur ketegaklurusan yang sebelumnya telah dirancang
( Wiatandityo ; 2004 ).
• Alat ukur ketegaklurusan menggunakan bantuan stand khusus yang berupa height gauge.
• Pergerakan sensor displacement dimana dalam alat ukur ini bergerak naik dan turun, masih digerakkan dengan cara manual.
• Dalam alat ukur ketegaklurusan ini menggunakan pengolah sinyal ADC ( Analog to Digital Converter ).
PERUMUSAN MASALAH
• Bagaimana merancang unit kontrol.
• Bagaimana membuatinterface data hasil pengukuran.
TUJUAN PENELITIAN
• Merancang dan membuat unit kontrol untuk mengatur gerak motor dc
• Merancang dan membuat pengolah sinyal ADC
BATASAN MASALAH
• Alat ukur yang dibuat adalah alat ukur penyimpangan geometris dengan menggunakan sensor displacement (LVDT).
• Mekanisme alat ukur tidak dibahas secara khusus.
• Mekanisme pergerakan motor dan interface data dari sensor dikontrol dengan menggunakan mikroprosesor AD574A.
• Sensor LVDT dianggap dalam keadaan normal dan baik.
• Input nilai jarak yang harus ditempuh dalam software interface adalah sama dengan jarak yang ditempuh pada mekanisme alat ukur.
• Tidak membahas detail proses pembuatan software interface alat ukur ketegaklurusan.
TINJAUAN PUSTAKA • Penyimpangan Geometrik . deviasi luasan, deviasi bentuk, deviasi lokasi, gelombang, kekasaran, surface discontinuities dan deviasi tepi.
• Ketegaklurusan Ketegaklurusan adalah kondisi dimana dua buah garis atau
bidang yang berpotongan sehingga membentuk sudut 900 .
• Sensor Linear Variable Displacement Transducer (LVDT) • Dua kumparan sekunder mempunyai tegangan induksi
karena hubungan fluk dengan bagian primer.
• Fluk magnetic dibangkitkan dengan cara menghubungkan kumparan primer dengan arus AC
.
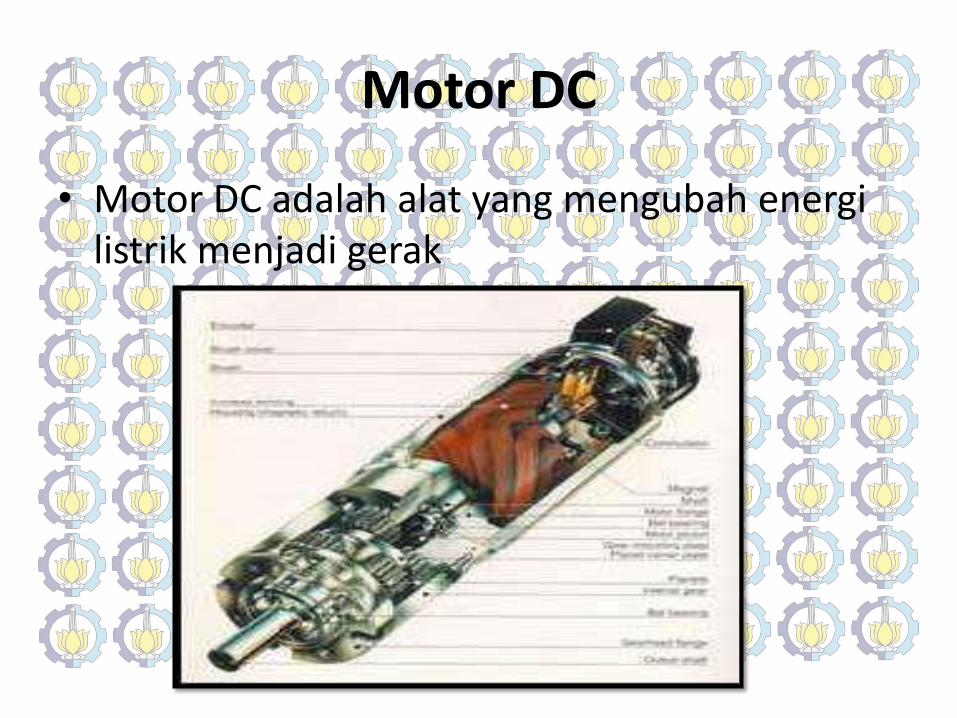
Motor DC
• Motor DC adalah alat yang mengubah energi listrik menjadi gerak
Mikroprosesor
• IC digital yang berbentuk kotak hitam ( black box ) yang mempunyai sejumlah saluran data ( bus data ), sejumlah alamat (address bus), sejumlah saluran kontrol ( control bus ), dan saluran sumber daya ( power supply )
• Saluran kotrol dipergunakan untuk mensinkronkan cara kerja mikroprosesor dengan cara komponen-komponen diluar mikroprosesor. Kumpulan dari saluran kontrol tersebut disebut saluran kontrol
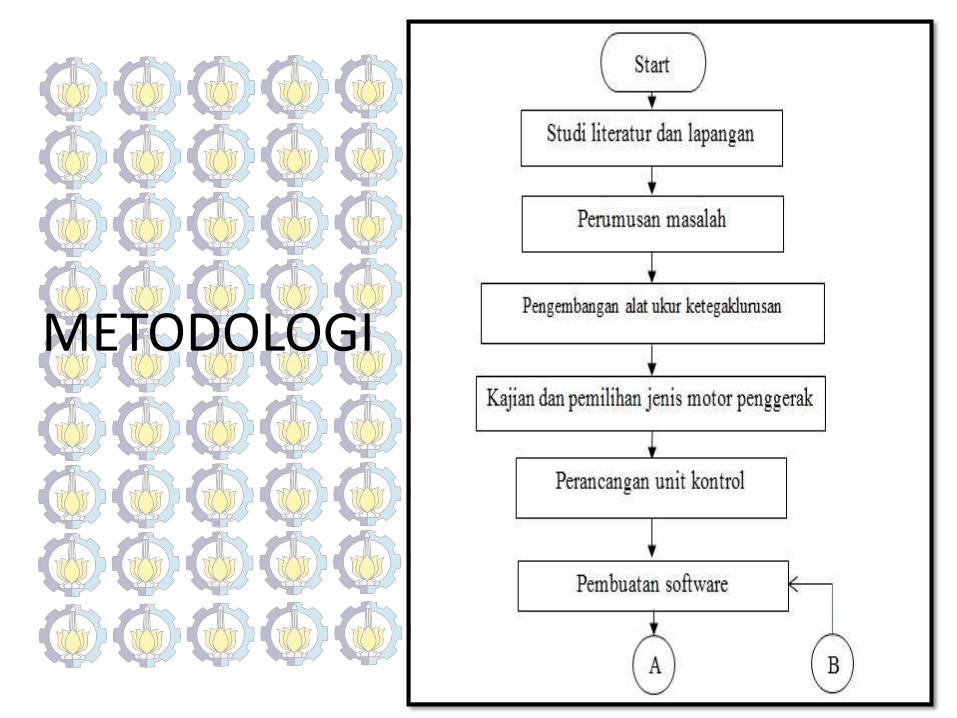
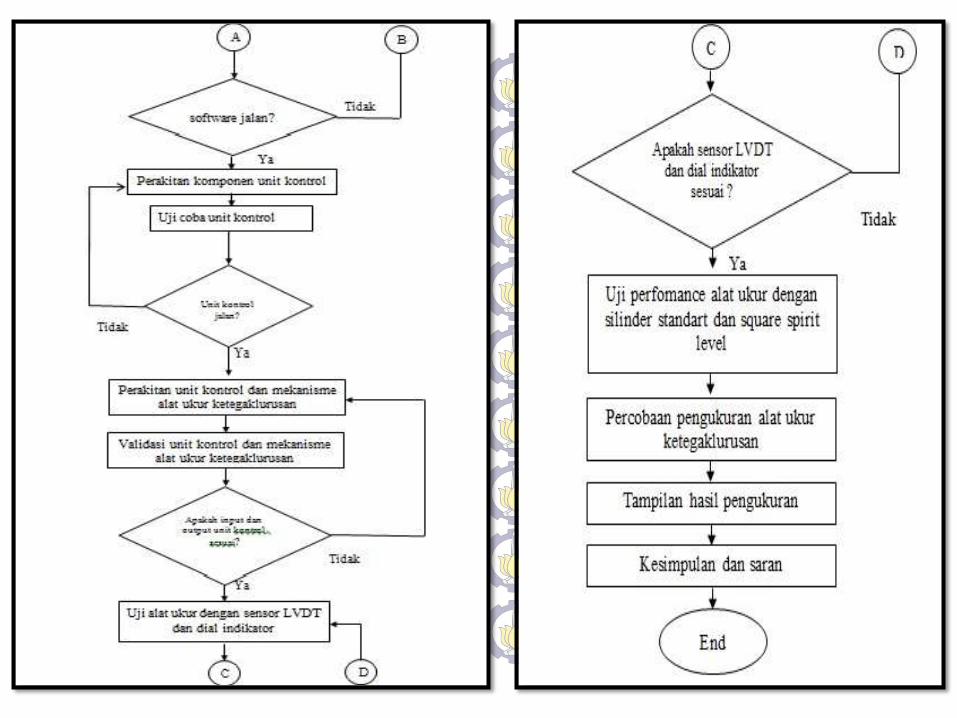
METODOLOGI
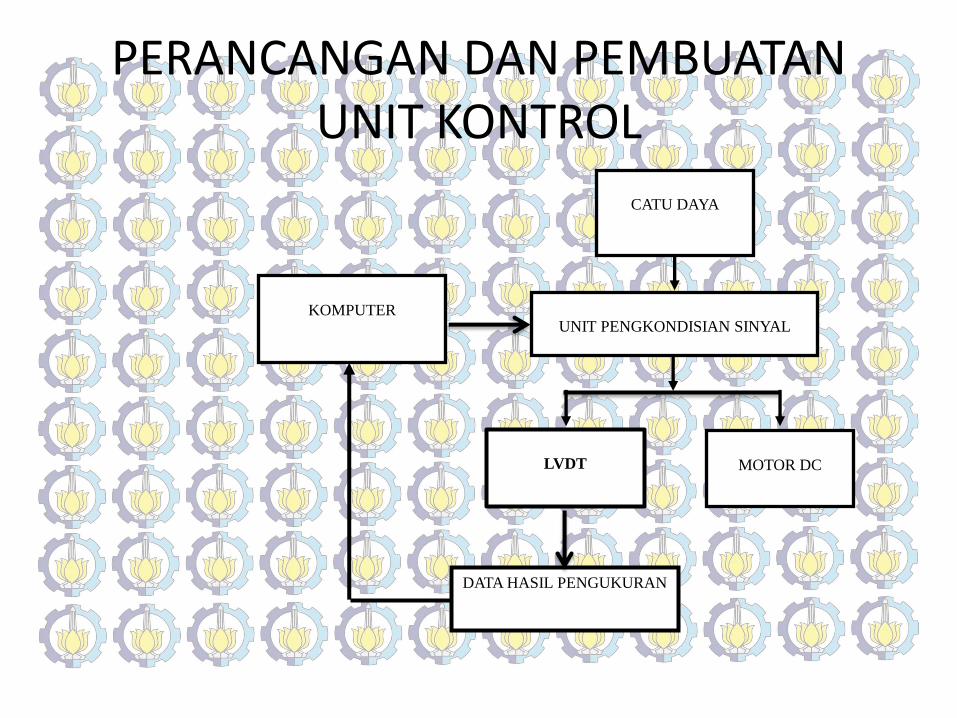
PERANCANGAN DAN PEMBUATAN UNIT KONTROL
DATA HASIL PENGUKURAN
KOMPUTER
CATU DAYA
UNIT PENGKONDISIAN SINYAL
LVDT
MOTOR DC
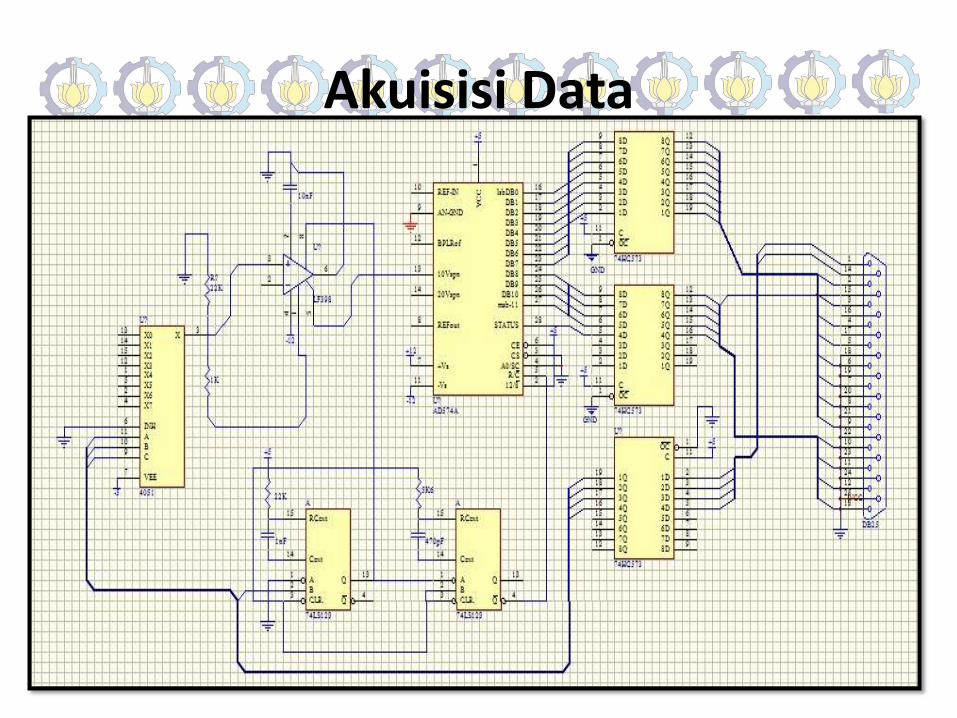
Akuisisi Data
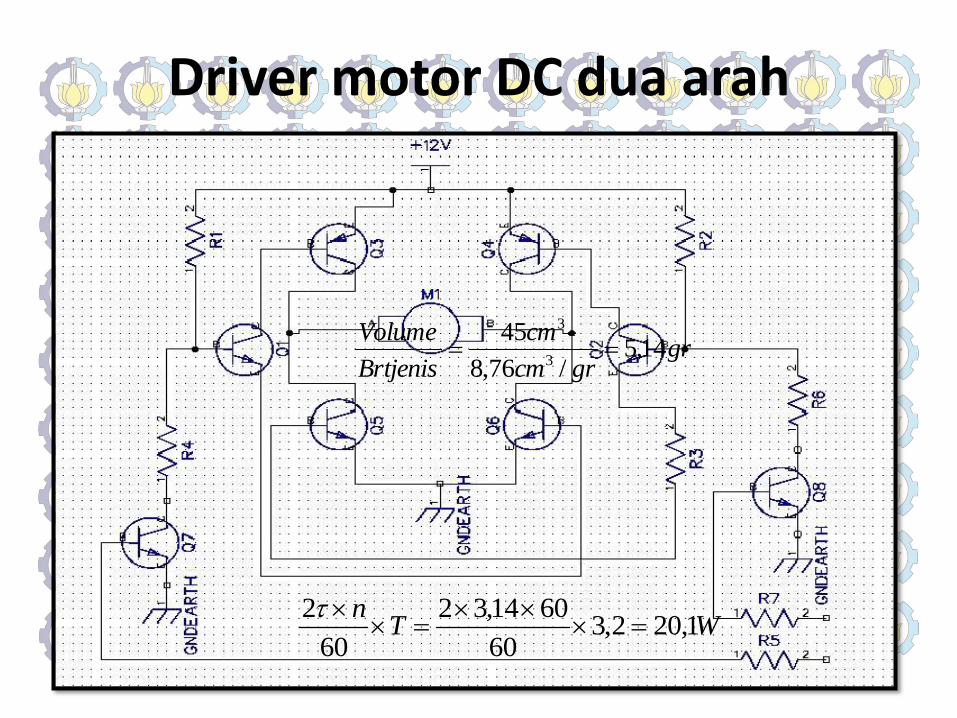
Driver motor DC dua arah
grgrcm
cm
Brtjenis
Volume14,5
/76,8
453
3
WTn
1,202,360
6014,32
60
2
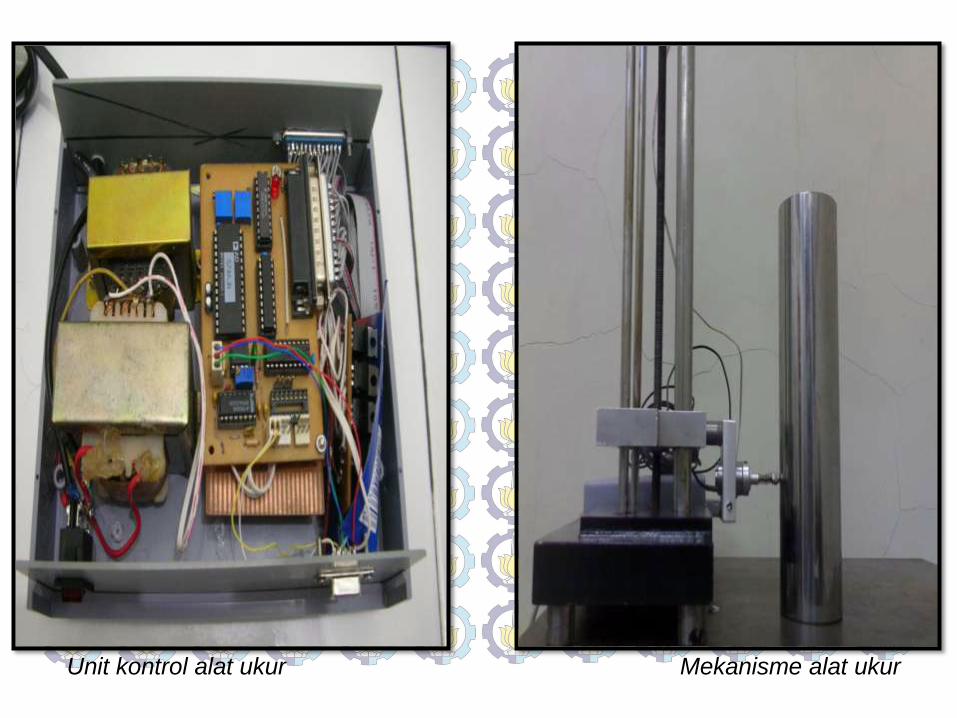
Unit kontrol alat ukur Mekanisme alat ukur
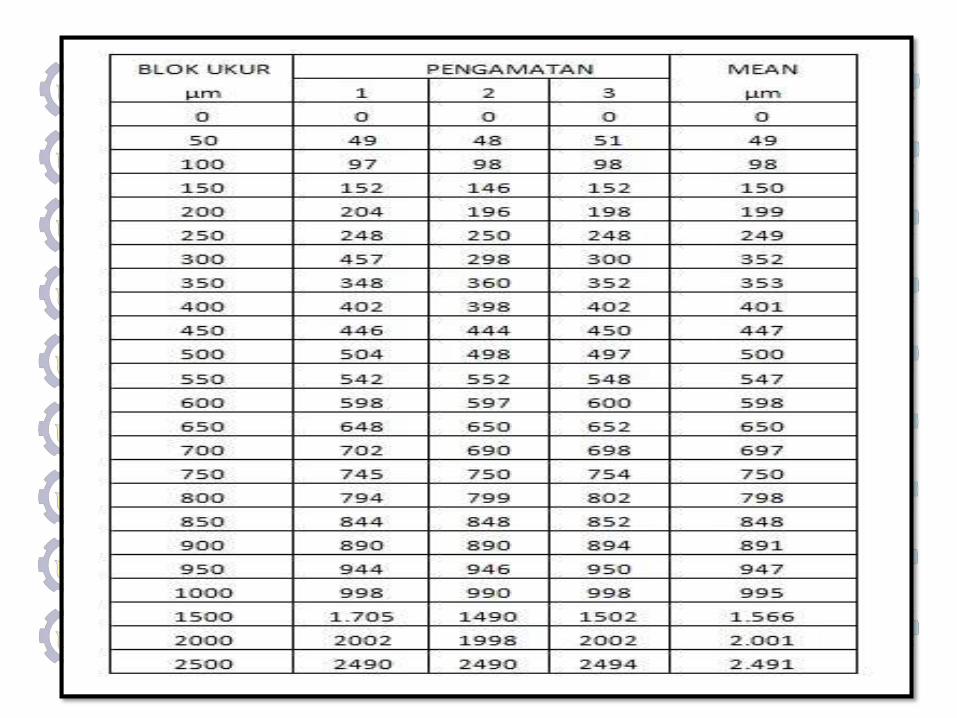
KALIBRASI DAN VALIDASI
• SENSOR LVDT
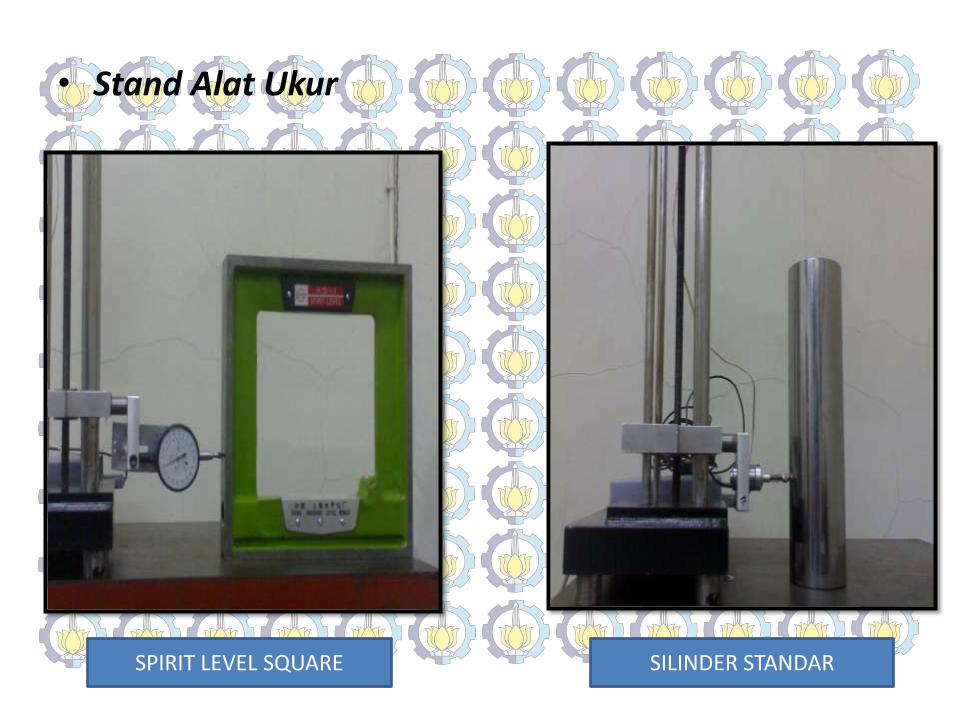
• Stand Alat Ukur
SPIRIT LEVEL SQUARE SILINDER STANDAR
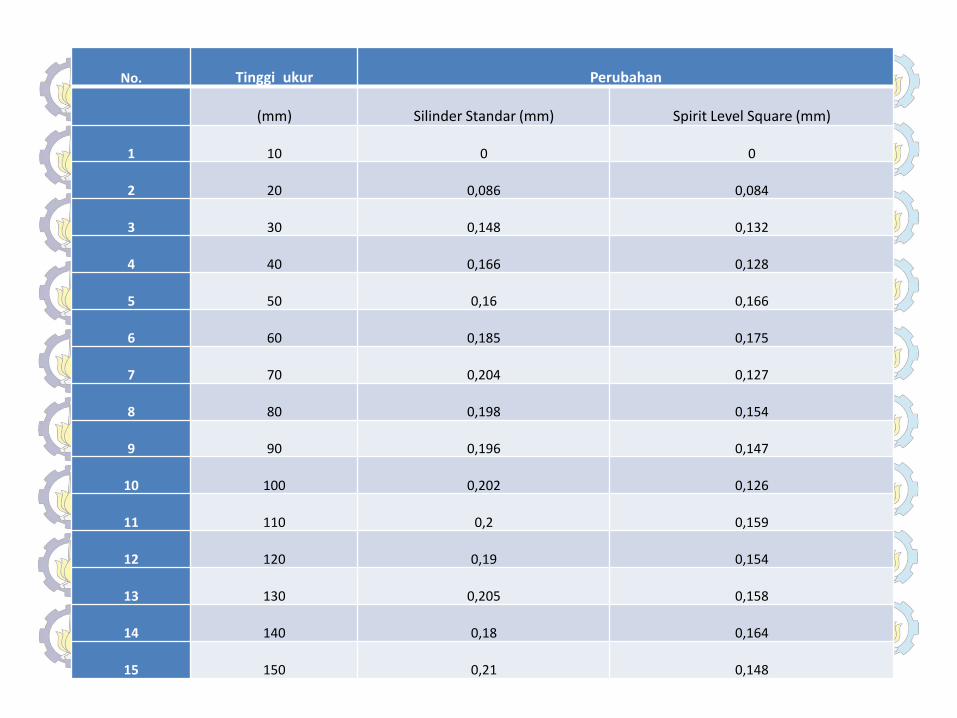
No. Tinggi ukur Perubahan
(mm) Silinder Standar (mm) Spirit Level Square (mm)
1 10 0 0
2 20 0,086 0,084
3 30 0,148 0,132
4 40 0,166 0,128
5 50 0,16 0,166
6 60 0,185 0,175
7 70 0,204 0,127
8 80 0,198 0,154
9 90 0,196 0,147
10 100 0,202 0,126
11 110 0,2 0,159
12 120 0,19 0,154
13 130 0,205 0,158
14 140 0,18 0,164
15 150 0,21 0,148
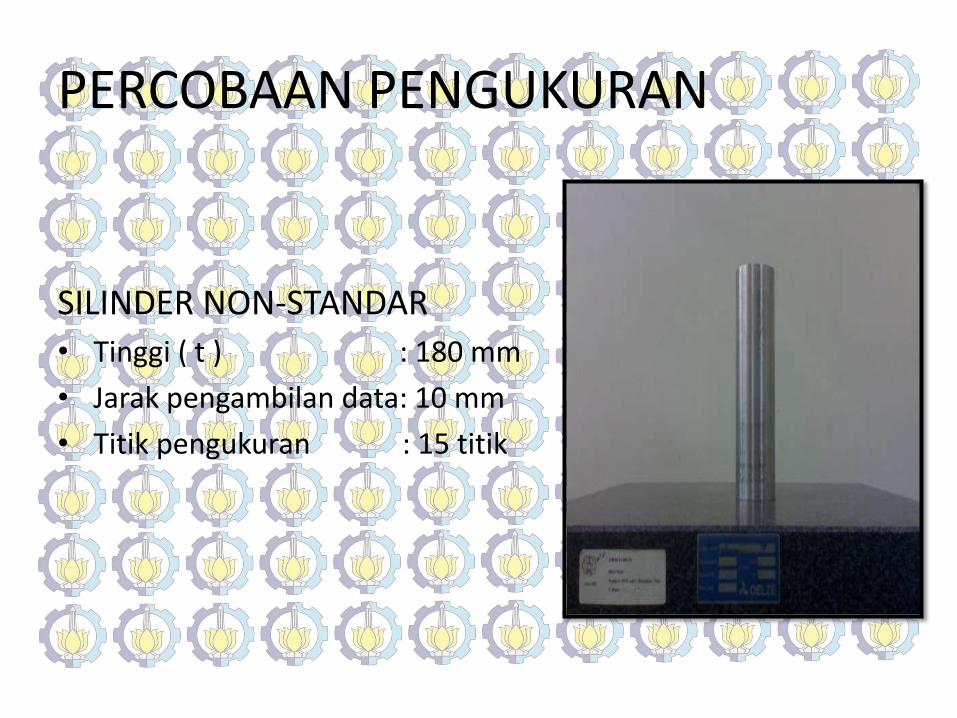
PERCOBAAN PENGUKURAN
SILINDER NON-STANDAR
• Tinggi ( t ) : 180 mm
• Jarak pengambilan data: 10 mm
• Titik pengukuran : 15 titik
Prosedur pengukuran
• Meletakkan mekanis alat ukur ketegaklurusan dengan meja datar standart.
• Benda ukur diletakkan diatas meja datar.
• LVDT dipasang pada mekanisme.
• Masukkan nilai panjang jarak yang ingin diukur, kemudian menentukan jumlah titik pengambilan data setelah itu menentukan pengambilan data dilakukan pergerakan naik atau turun yang telah ditentukan pada software.
• Dengan perintah komputer LVDT dijalankan sepanjang arah y sepanjang 150 mm dengan panjang awal 180 mm dengan pengambilan data tiap 10 mm.
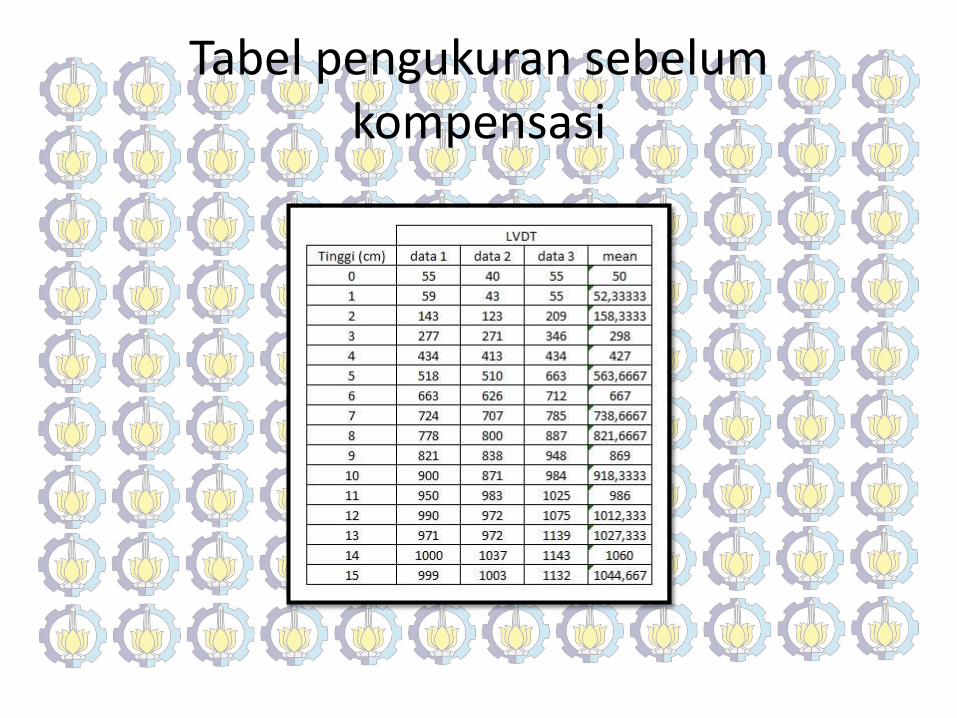
Tabel pengukuran sebelum kompensasi
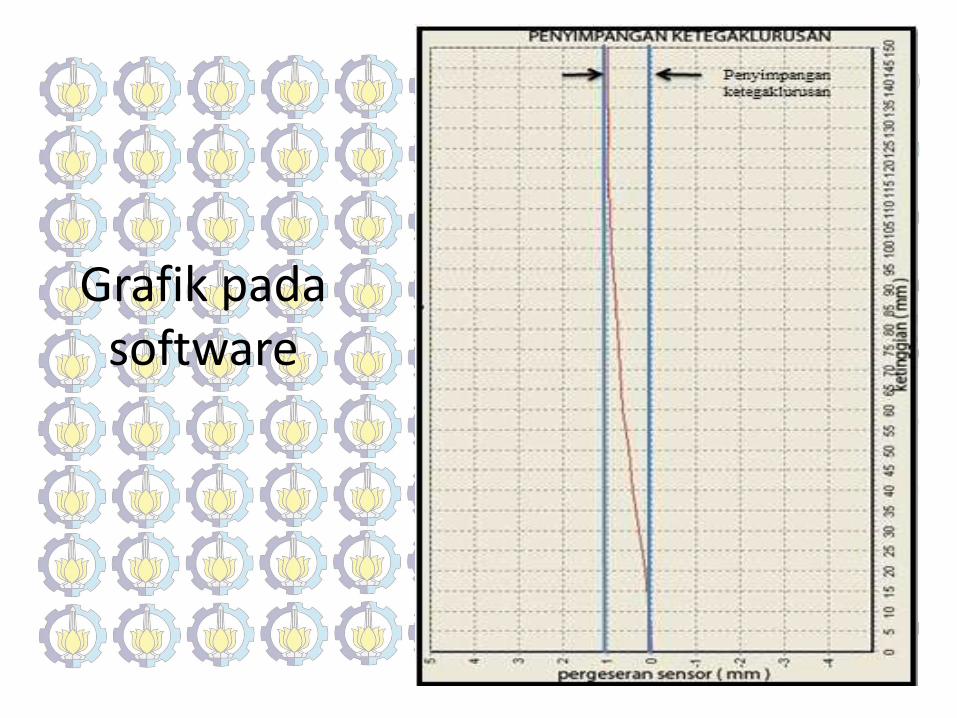
Grafik pada software
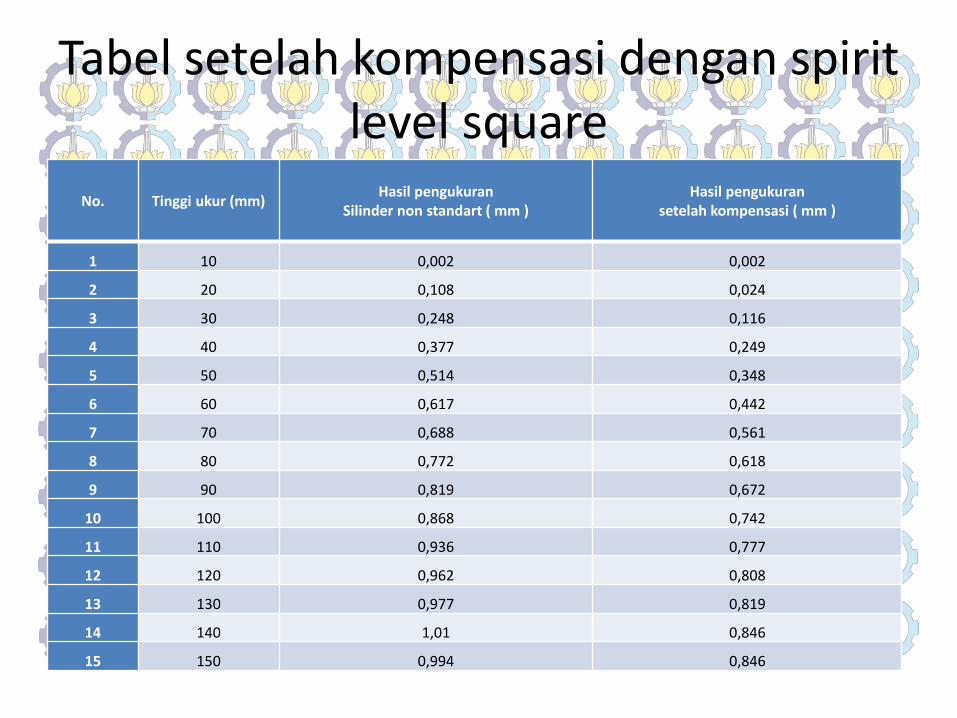
Tabel setelah kompensasi dengan spirit level square
No. Tinggi ukur (mm) Hasil pengukuran
Silinder non standart ( mm ) Hasil pengukuran
setelah kompensasi ( mm )
1 10 0,002 0,002
2 20 0,108 0,024
3 30 0,248 0,116
4 40 0,377 0,249
5 50 0,514 0,348
6 60 0,617 0,442
7 70 0,688 0,561
8 80 0,772 0,618
9 90 0,819 0,672
10 100 0,868 0,742
11 110 0,936 0,777
12 120 0,962 0,808
13 130 0,977 0,819
14 140 1,01 0,846
15 150 0,994 0,846
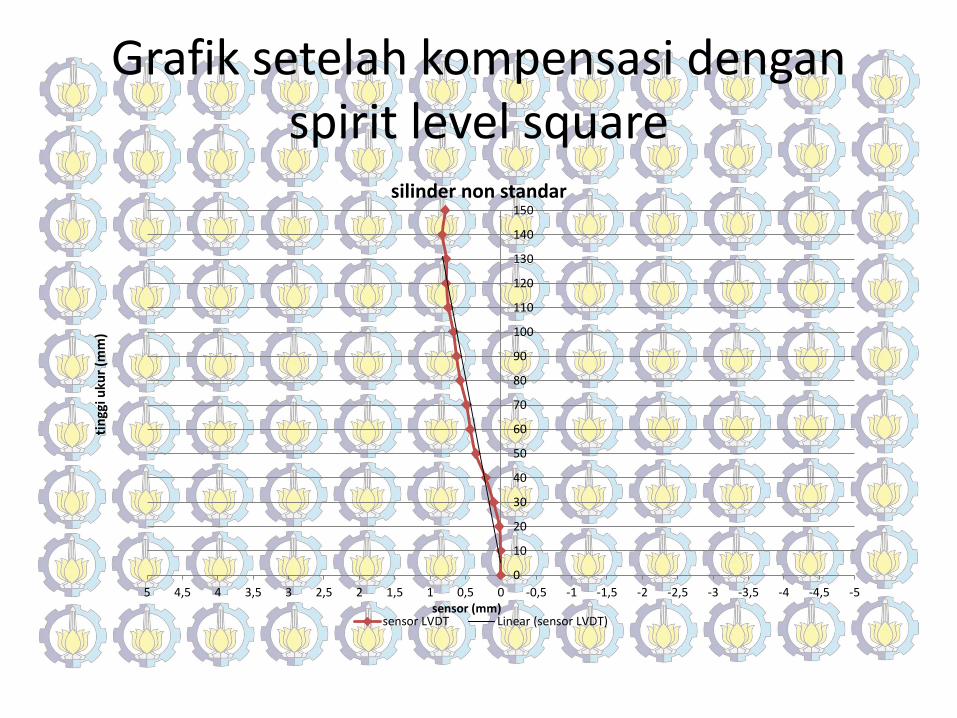
Grafik setelah kompensasi dengan spirit level square
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
-5-4,5-4-3,5-3-2,5-2-1,5-1-0,500,511,522,533,544,55
tin
ggi u
kur
(mm
)
sensor (mm)
silinder non standar
sensor LVDT Linear (sensor LVDT)
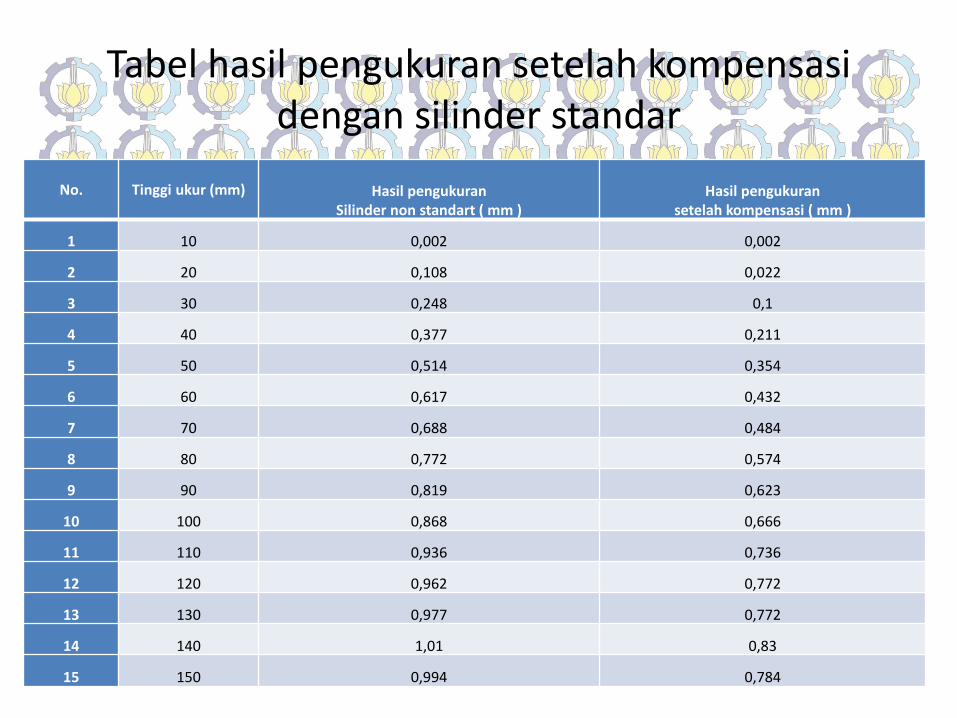
Tabel hasil pengukuran setelah kompensasi dengan silinder standar
No. Tinggi ukur (mm) Hasil pengukuran Silinder non standart ( mm )
Hasil pengukuran setelah kompensasi ( mm )
1 10 0,002 0,002
2 20 0,108 0,022
3 30 0,248 0,1
4 40 0,377 0,211
5 50 0,514 0,354
6 60 0,617 0,432
7 70 0,688 0,484
8 80 0,772 0,574
9 90 0,819 0,623
10 100 0,868 0,666
11 110 0,936 0,736
12 120 0,962 0,772
13 130 0,977 0,772
14 140 1,01 0,83
15 150 0,994 0,784
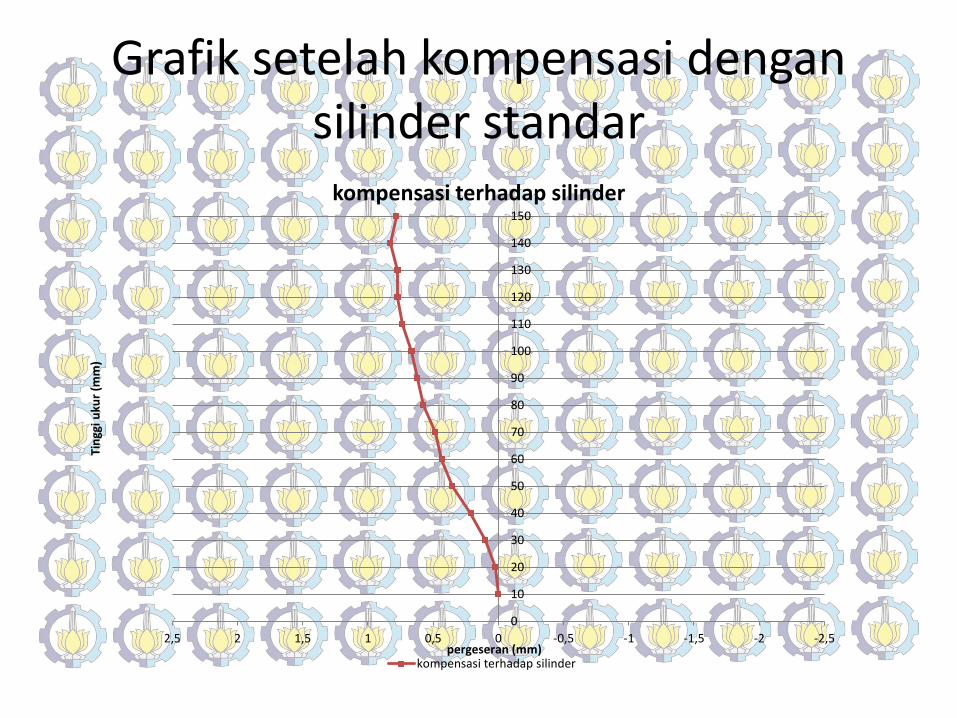
Grafik setelah kompensasi dengan silinder standar
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
-2,5-2-1,5-1-0,500,511,522,5
Tin
ggi u
kur
(mm
)
pergeseran (mm)
kompensasi terhadap silinder
kompensasi terhadap silinder
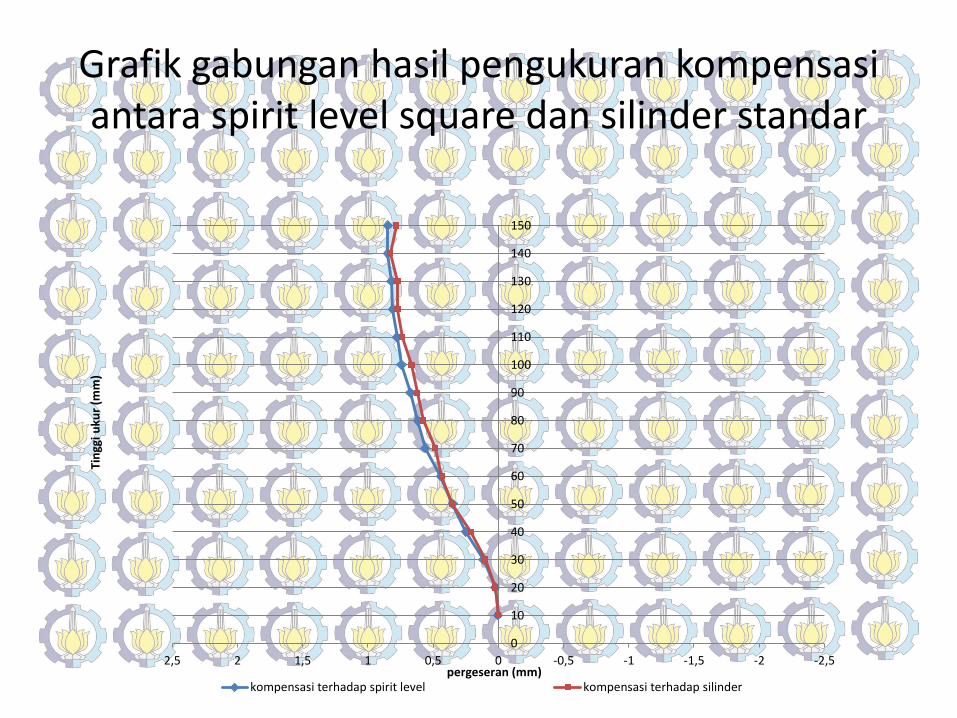
Grafik gabungan hasil pengukuran kompensasi antara spirit level square dan silinder standar
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
-2,5-2-1,5-1-0,500,511,522,5
Tin
ggi u
kur
(mm
)
pergeseran (mm) kompensasi terhadap spirit level kompensasi terhadap silinder
KESIMPULAN
• Unit kontrol alat ukur ketegaklurusan dapat digunakan untuk melakukan pengukuran ketegaklurusan.
• software dapat digunakan untuk mengontrol dan memperlihatkan hasil pengukuran pada layar monitor berupa grafik penyimpangan dan tabel data pengukuran.
• Uji perfomance dilakukan dengan melakukan pengukuran dengan dengan benda ukur standar yaitu silinder standar dan spirit level square. Dan kompensasi pengukuran ditentukan terhadap spirit level standar karena hasil pengukuran yang lebih signifikan.
• Alat ukur dapat digunakan untuk melakukan pengukuran ketegaklurusan geometri benda ukur terhadap sumbu dan bidang datar.
SEKIAN
TERIMA KASIH
Related Documents











