PAPER TUGAS AKHIR PERIODE JULI 2011 Fitranda Arys Pradana ‐ 5107100120 Page 1 RANCANG BANGUN APLIKASI BERPINDAH PENGENDALI ROBOT BERBASIS ANDROID MENGGUNAKAN KONEKSI BLUETOOTH Fitranda Arys Pradana - Ary Mazharuddin S., S.Kom, M.Comp.Sc - I Wayan Suardinata, S.Kom Jurusan Teknik Informatika, Fakultas Teknologi Informasi, Institut Teknologi Sepuluh Nopember, Email: [email protected] Abstraksi Pembuatan sistem pengendalian pergerakan robot pada masa sekarang semakin berkembang begitu pula dengan perkembangan mobile phone. Mobile phone sekarang banyak menggunakan sensor accelerometer yang dimanfaatkan untuk menstabilkan gambar dan juga untuk pengganti tombol dalam sebuah game pada mobile phone. Kemudian penggunaan operating system yang canggih seperti android mendukung kerja sensor accelerometer dengan baik. Tugas akhir ini bertujuan untuk membuat sistem pergerakan robot dengan memanfaatkan sensor accelerometer pada mobile phone. Selain menggerakan robot, sistem juga mampu mengetahui arah hadapan dan jarak rintangan yang ditemui oleh robot. Untuk itu pemanfaatan sensor kompas dan ultrasonik pada robot NXT sangat diperlukan. Pemrograman Bahasa Java untuk android Pemrograman Bahasa Java untuk Lego Mindstroms digunakan dalam pembuatan sistem pergerakan robot pada tugas akhir ini. Pada hasil uji coba sistem pergerakan robot ini, dapat disimpulkan bahwa didapatkan jarak jangkauan bluetooth pada robot ke bluetooth pada perangkat android yang mana baik sistem maupun robot masih dapat dikendalikan dengan baik sejauh 18 meter. Untuk uji coba sensor accelerometer, sensor kompas, dan sensor ultrasonik berjalan dengan baik karena pergerakan maju, mundur, belok kanan, belok kiri, arah hadapan, dan jarak rintangan yang ditemui robot dapat dibaca dengan baik pada sistem simulasi. Meskipun demikian, masih banyak pengembangan yang dapat dilakukan pada tugas akhir ini sehingga nilai gunanya dapat meningkat seiring dengan perkembangan teknologi dan framework yang mempermudah pengembangan sistem pergerakan robot ini. Kata kunci : android, pergerakan, pengendali, simulasi, Robot NXT. 1. PENDAHULUAN Pada masa sekarang mobile phone sudah banyak sekali di jumpai dimana saja. Banyak berbagai tipe dan jenis, mulai dari yang berukuran kecil hingga besar, dari yang tipis, hingga tebalnya hampir setebal notebook dengan layar 7 inch, dari model lama hingga model baru yang canggih sehingga tidak memerlukan lagi alat-alat seperti kamera, video camcorder, dan lainnya. Hal ini menumbuhkan minat developer software mobile phone untuk membuat perangkat lunak yang dapat memenuhi kebutuhan manusia sehari-hari. Teknologi mobile phone semakin berkembang, untuk sekarang OS Android sedang bagus- bagusnya. Banyak developer yang mengembangkan aplikasi mereka pada OS ini. Seiring dengan perkembangan teknologi yang semakin maju, teknologi robot pun digunakan sebagai alat bantu manusia yang memiliki beberapa kelebihan dan akan terus berkembang. Salah satu pengembangan dalam teknologi robot adalah pengendalian robot menggunakan mobile phone. Dengan dilatar belakangin oleh itulah, tugas akhir ini dibuat sebuah aplikasi yang mengendalikan pergerakkan robot NXT melalui konesksi bluetooth dengan memanfaatkan sensor accelerometer pada mobile phone berbasis Android. 2. DASAR TEORI Pada bab ini akan membahas dasar teori yang menjadi dasar dari pembuatan tugas akhir ini. Hal ini berguna untuk memberikan pengetahuan dasar/teori dasar yang digunakan dalam pembuatan sistem sehingga kebutuhan sistem dapat di ketahui. 2.1 Bluetooth Bluetooth adalah sebuah teknologi komunikasi wireless (tanpa kabel) yang beroperasi dalam pita frekuensi 2,4 GHz unlicensed ISM (Industrial, Scientific, and Medical) dengan menggunakan sebuah frequency hopping tranceiver yang mampu menyediakan layanan komunikasi data dan suara secara real-time antara host-host bluetooth dengan jarak jangkauan layanan yang terbatas (sekitar 20 meter). Bluetooth sendiri dapat berupa card yang bentuk dan fungsinya hampir sama dengan card yang digunakan untuk wireless

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 1
RANCANG BANGUN APLIKASI BERPINDAH PENGENDALI ROBOT BERBASIS ANDROID MENGGUNAKAN KONEKSI
BLUETOOTH
Fitranda Arys Pradana - Ary Mazharuddin S., S.Kom, M.Comp.Sc - I Wayan Suardinata, S.Kom
Jurusan Teknik Informatika, Fakultas Teknologi Informasi, Institut Teknologi Sepuluh Nopember, Email: [email protected]
Abstraksi
Pembuatan sistem pengendalian pergerakan robot pada masa sekarang semakin berkembang begitu pula dengan perkembangan mobile phone. Mobile phone sekarang banyak menggunakan sensor accelerometer yang dimanfaatkan untuk menstabilkan gambar dan juga untuk pengganti tombol dalam sebuah game pada mobile phone. Kemudian penggunaan operating system yang canggih seperti android mendukung kerja sensor accelerometer dengan baik.
Tugas akhir ini bertujuan untuk membuat sistem pergerakan robot dengan memanfaatkan sensor accelerometer pada mobile phone. Selain menggerakan robot, sistem juga mampu mengetahui arah hadapan dan jarak rintangan yang ditemui oleh robot. Untuk itu pemanfaatan sensor kompas dan ultrasonik pada robot NXT sangat diperlukan. Pemrograman Bahasa Java untuk android Pemrograman Bahasa Java untuk Lego Mindstroms digunakan dalam pembuatan sistem pergerakan robot pada tugas akhir ini.
Pada hasil uji coba sistem pergerakan robot ini, dapat disimpulkan bahwa didapatkan jarak jangkauan bluetooth pada robot ke bluetooth pada perangkat android yang mana baik sistem maupun robot masih dapat dikendalikan dengan baik sejauh 18 meter. Untuk uji coba sensor accelerometer, sensor kompas, dan sensor ultrasonik berjalan dengan baik karena pergerakan maju, mundur, belok kanan, belok kiri, arah hadapan, dan jarak rintangan yang ditemui robot dapat dibaca dengan baik pada sistem simulasi. Meskipun demikian, masih banyak pengembangan yang dapat dilakukan pada tugas akhir ini sehingga nilai gunanya dapat meningkat seiring dengan perkembangan teknologi dan framework yang mempermudah pengembangan sistem pergerakan robot ini.
Kata kunci : android, pergerakan, pengendali, simulasi, Robot NXT. 1. PENDAHULUAN
Pada masa sekarang mobile phone sudah banyak sekali di jumpai dimana saja. Banyak berbagai tipe dan jenis, mulai dari yang berukuran
kecil hingga besar, dari yang tipis, hingga tebalnya hampir setebal notebook dengan layar 7 inch, dari model lama hingga model baru yang canggih sehingga tidak memerlukan lagi alat-alat seperti kamera, video camcorder, dan lainnya. Hal ini menumbuhkan minat developer software mobile phone untuk membuat perangkat lunak yang dapat memenuhi kebutuhan manusia sehari-hari. Teknologi mobile phone semakin berkembang, untuk sekarang OS Android sedang bagus-bagusnya. Banyak developer yang mengembangkan aplikasi mereka pada OS ini.
Seiring dengan perkembangan teknologi yang semakin maju, teknologi robot pun digunakan sebagai alat bantu manusia yang memiliki beberapa kelebihan dan akan terus berkembang. Salah satu pengembangan dalam teknologi robot adalah pengendalian robot menggunakan mobile phone.
Dengan dilatar belakangin oleh itulah, tugas akhir ini dibuat sebuah aplikasi yang mengendalikan pergerakkan robot NXT melalui konesksi bluetooth dengan memanfaatkan sensor accelerometer pada mobile phone berbasis Android.
2. DASAR TEORI
Pada bab ini akan membahas dasar teori yang menjadi dasar dari pembuatan tugas akhir ini. Hal ini berguna untuk memberikan pengetahuan dasar/teori dasar yang digunakan dalam pembuatan sistem sehingga kebutuhan sistem dapat di ketahui.
2.1 Bluetooth
Bluetooth adalah sebuah teknologi komunikasi wireless (tanpa kabel) yang beroperasi dalam pita frekuensi 2,4 GHz unlicensed ISM (Industrial, Scientific, and Medical) dengan menggunakan sebuah frequency hopping tranceiver yang mampu menyediakan layanan komunikasi data dan suara secara real-time antara host-host bluetooth dengan jarak jangkauan layanan yang terbatas (sekitar 20 meter). Bluetooth sendiri dapat berupa card yang bentuk dan fungsinya hampir sama dengan card yang digunakan untuk wireless
PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 2
local area network (WLAN) dimana menggunakan frekuensi radio standar IEEE 802.11, hanya saja pada bluetooth mempunyai jangkauan jarak layanan yang lebih pendek dan kemampuan transfer data yang lebih rendah.
Pada dasarnya bluetooth diciptakan bukan hanya untuk menggantikan atau menghilangkan penggunaan kabel didalam melakukan pertukaran informasi, tetapi juga mampu menawarkan fitur yang baik untuk teknologi mobile wireless dengan biaya yang relatif rendah, konsumsi daya yang rendah, interoperability yang menjanjikan, mudah dalam pengoperasian dan mampu menyediakan layanan yang bermacam-macam. Untuk memberi gambaran yang lebih jelas mengenai teknologi bluetooth yang relatif baru ini kepada pembaca, berikut diuraikan tentang sejarah munculnya bluetooth dan perkembangannya, teknologi yang digunakan pada sistem bluetooth dan aspek layanan yang mampu disediakan, serta sedikit uraian tentang perbandingan metode modulasi spread spectrum FHSS (Frequency Hopping Spread Spectrum) yang digunakan oleh bluetooth dibandingkan dengan metode spread spectrum DSSS (Direct Sequence Spread Spectrum).[1]
Gambar 2.1 Contoh modul Bluetooth
2.2 OS Android
Android adalah sebuah software yang mencakup sistem operasi, middleware, dan key applications. Android SDK menyediakan tools dan API yang diperlukan untuk memulai mengembangkan aplikasi pada platform Android menggunakan bahasa pemrograman Java. [6]
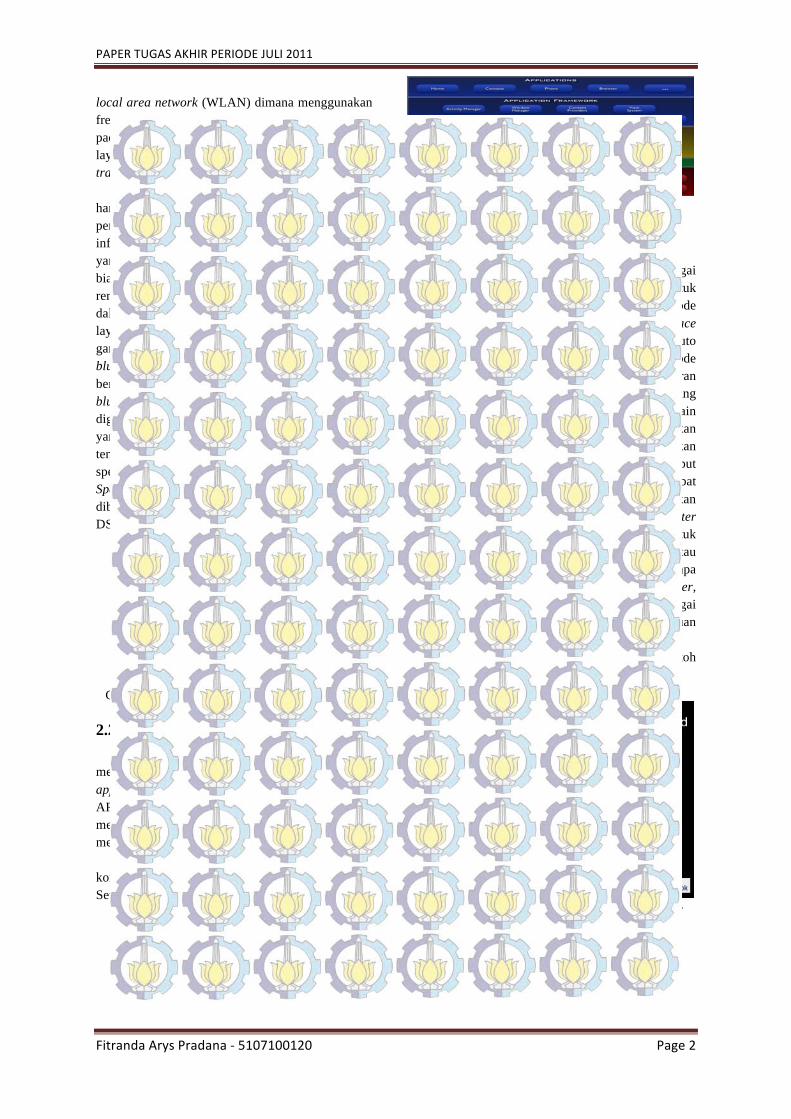
Gambar 2.2 berikut menunjukkan komponen utama dari sistem operasi Android. Setiap bagian ini dijelaskan secara rinci di bawah.
Gambar 2.2 Diagram Arsitektur Android
2.3 Accelerometer
Sensor gerak yang memiliki berbagai macam fungsi, salah satu fungsinya yaitu untuk mendefinisikan apakah ponsel berada di mode landscape atau portrait, sehingga user interface layar menyesuaikan dengan kondisi ponsel, auto deteksi sewaktu pengambilan foto dalam mode landscape atau portrait, mendeteksi suatu getaran suatu pengambilan foto, dan lain-lain. Fungsi yang lain juga digunakan sebagai sensor untuk bermain game. Sensor accelerometer sudah diterapkan terlebih dahulu oleh konsol Nintendo Wii, bahkan di beberapa ponsel juga diterapkan sensor tersebut untuk mendeteksi kekuatan G-Forces akibat kecelakaan mobil sehingga otomatis melakukan panggilan darurat ke nomor tertentu. Accelerometer juga bisa diterapkan sebagai aplikasi sport untuk mendeteksi jumlah langkah kita berjalan atau berlari berdasarkan gerakan pinggul. Beberapa ponsel memang dilengkapi dengan accelerometer, tetapi banyak pula menggunakan tilt sensor sebagai pengganti accelerometer, hanya saja kemampuan tilt sensor tidak selengkap accelerometer.[7]
Gambar 2.3 menggambarkan contoh penggunaan accelerometer pada mobile phone.
Gambar 2.3 Contoh penggunaan Accelerometer

PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 3
2.4 LEGO Mindstorm NXT LEGO Mindstorm NXT adalah robot yang
sangat mengasikan untuk bermain secara kreatif, karena disusun dari komponen-komponen yang bisa dilepas pasang. Kita dapat membangun berbagai konstruksi robot, kemudian memrogrammnya untuk berbagai tugas.[2]
2.4.1 Komponen Lego memiliki beberapa komponen inti
yang terdapat didalamnya. Komponent-Komponen tersebut terdiri atas brick, servo motor, dan sensor-sensor yang terdapat didalamnya. Berikut penjelasan mengenai komponen Lego Mindstorm NXT.
2.4.1.1 Brick Brick adalah komponen paling penting
dari robot NXT, karena berfungsi sebagai pengendali (otak robot). Brick dapat diisi program untuk melakukan berbagai aksi.[2]
Gambar 2.4 Brick
Untuk interaksi langsung, pada brick terdapat:
• Satu layar LCD • Speaker untuk mengeluarkan suara • Empat Tombol (Cancel, OK, Left, Right).
Selain itu, brick dapat menerima masukan dari 4 sensor, dan menjalankan 3 motor.[2]
Gambar 2.5 Komponen – komponen NXT Robot
2.4.1.2 Motor Motor berfungsi untuk mengerakan bagian
robot, seperti memutar roda atau menjadi sendi. Satu brick bisa dipasangi hingga 3 motor.[2]
Gambar 2.6 Servo Motor
2.4.1.3 Sensor Sentuh Sensor sentuh berkerja seperti indra peraba
pada manusia. Gunanya untuk membuat robot yang kalau tesentuh akan bereaksi seperti berjalan mundur,belok ke kanan atau ke kiri,dll tergantung progamnya.[3]
Gambar 2.7 Sensor Sentuh
2.4.1.4 Sensor Ultrasonik Sensor Ultrasonik berfungsi seperti mulut
dan telinga pada kelelawar, memancarkan Ultrasonik dan mendengar pantulannya supaya dapat memperkirakan jarak benda di depannya.[3]
Gambar 2.8 Sensor Ultrasonik
2.4.1.5 Sensor Cahaya Sensor cahaya seperti mata, berguna untuk
mengetahui gelap terangnya sesuatu (mode pasif). Pada mode aktif, bisa memancarkan cahaya dan menerima pantulannya, antara lain untuk membedakan warna benda.[3]
PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 4
Gambar 2.9 Sensor Cahaya
2.4.1.6 Sensor Suara Sensor suara berfungsi seperti telinga, yaitu
untuk menangkap suara.[3]
Gambar 2.10 Sensor Suara
2.5 HiTechnic Magnetic Compass Sensor
Gambar 2.11 adalah gambar sensor kompas yang dibuat oleh Hitechnic Company, sebuah perusahaan yang di berikan sertifikasi oleh Lego Company dalam membuat sebsor dengan kualitas tinggi dan aman.
Sensor kompas berisi kompas magnetic yang mengukur medan magnet bumi dan menghitung sudutnya. Sensor Kompas ini terhubung ke port sensor NXT menggunakan NXT wire dan menggunakan protokol komunikasi I2C digital. Sudut dari kompass dihitung dari yang terdekat 10 dan mengembalikan nilai dari0 – 359 serta di refresh setiap 100 kali perdetik.
Sensor Kompas NXT adalah standard sensor pada Lego Mindstroms yang sesuai dengan element Mindstrom lain. Sebagai catatan sensor kompas hanya akan beroperasi dengan benar dalam posisi horizontal. Jadi ketika membangun sebuah robot dengan memiliki kemampuan membaca harus memperhatikan hal ini agar kompas diletakkan secara horizontal.[4]
Gambar 2.11 Sensor Kompas
2.6 LeJOS
LeJOS adalah kit pemrograman untuk robot LEGO Mindstorm NXT berbasis bahasa Java. Kalau anda ingin memainkan NXT hingga kecerdasan yang sangat tinggi, LeJOS-lah cara yang paling baik untuk digunakan.
NXT diciptakan untuk pendidikan dan hiburan. Karena itu, kit pemrograman asli yang disediakan oleh LEGO adalah NXT-G berbasis grafis yang sangat memudahkan orang awam untuk segera memainkan NXT. Namun bagi mereka yang ingin lebih jauh menanamkan kecerdasan buatan canggih ke NXT, diperlukan kit pemrograman yang lebih serius. Salah satu pilihan untuk itu adalah LeJOS, yang berbasis bahasa java.[8]
2.6.1 Keunggulan
Ada beberapa keunggulan dalam menggunakan LeJOS:
• Bisa multiplatform, jalan di Linux maupun Windows.
• Mendukung pemrograman berorientasi obyek, dengan pustaka Java yang kaya (string, array, dll).
• Seluruh komponen robot (motor, sendor, dll.) didefinisikan sebagai obyek.
• Sanggup multithreading, untuk pemrograman paralel.
• Bisa rekursif, akan sangat memudahkan pemrograman kecerdasan buatan.
Tersedia fitur khusus untuk pemrograman robot (misal subsumption).
3. DESAIN DAN IMPLEMENTASI Dalam tugas akhir ini, dibangun sebuah
sistem yang mampu melakukan pengendalian terhadap pergerakkan robot. Sistem pengendalian robot memanfaatkan sensor gerak accelerometer yang ada pada perangkat android. Nantinya, sistem akan memberikan gambaran pergerakkan robot misalnya, maju, mundur, belok kanan, dan belok kiri serta perubahan orientasi arah hadapan robot.
Hal ini dimungkinkan karena pada robot dipasangkan sebuah sensor kompas yang memberikan informasi ke arah mana robot menghadap. Dengan mengacu pada sensor kompas inilah, sistem akan melakukan penyesuaian hadapan robot pada simulasi sesuai dengan keadaan robot yang sebenarnya.
Penggunaan sampling datapun dipakai untuk memperkuat hasil dari pembacaan sensor kompas setiap detiknya. Pengiriman informasi berupa posisi hadapan robot dan mengendalikan robot secara jarak jauh yang dilakukan dengan menggunakan koneksi melalui bluetooth. Dengan pemakaian teknologi bluetooth ini, semakin

PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 5
memudahkan hubungan antara sistem dengan robot pada dunia nyata tanpa menggunakan media kabel.
Selain itu simulasi juga memberikan informasi rintangan yang ditemui robot dengan memanfaatkan sensor ultrasonik dari pake Lego Mindstroms NXT.
Sistem ini dibuat dengan menggunakan Java. Sebagian dibuat pada perangkat android dan sebagian lagi dibuat pada robot NXT memanfaatkan library LeJOS. Dengan Java kita dapat membuat sebuah simulasi 2D dan juga mengendalikan robot memanfaatkan sensor accelerometer dan melakukan pengambilan informasi nilaiderajat hadapan robot dari sensor kompas serta melakukan pengambilan informasi nilai jarak antara robot NXT dengan rintangan yang ditemui dengan memanfaatkan sensor ultrasonik pada robot NXT.
Arsitektur umum sistem digunakan untuk memberikan gambaran secara umum kepada pembaca tentang sistem yang akan dibangun pada tugas akhir ini.
Gambar 3.1 Arsitektur Umum Sistem
Pada Gambar 3.1 Arsitektur Umum
Sistem, dapat dijelaskan ketika user mengendalikan robot melalui Android. Sistem pada Android akan mengirimkan data gerakan accelerometer sebagai masukan yang nantinya akan diolah oleh sistem pada NXT sesuai dengan masukan yang diterima. Kemudian sistem pada NXT akan mengirimkan data sensor kompas dan ultrasonik untuk mengetahui arah hadapan serta ri tangan yang nantinya akan diolah oleh sistem pada Android. Setelah masukan diterima, sistem akan mengendalikan pergerakan robot pada dunia nyata sekaligus pergerakan robot pada simulasi sesuai dengan masukan yang diterima. Untuk melakukan hal ini diperlukan sebuah konektivitas antara sistem pergerakan robot dengan robot itu sendiri.
Pada tugas akhir ini, konektivitas yang digunakan antara sistem dan robot itu sendiri adalah bluetooth sehingga dengan penggunaan
media bluetooth ini penggunaan kabelpun dapat dihilangkan. Ruang lingkup yang dapat dicapai melalui penggunaan media bluetooth ini kurang lebih sekitar 20 meter.
Selanjutnya, sensor kompas yang terpasang pada robot akan mengirimkan setiap perubahan hadapan robot pada dunia nyata kepada sistem sehingga sistem dapat mengetahui hadapan robot pada dunia nyata dan kemudian melakukan perubahan hadapan robot pada simulasi. Kemudian, sensor ultasonik yang terpasang pada robot akan mengirimkan informasi jika robot menemui rintangan.
Simulasi yang dibuat disini melakukan penggambaran visual terhadap pergerakan dari hadapan robot termasuk pergerakan maju, mundur, belok kanan dan belok kiri. Simulasi ini dibuat dengan menggunakan Java.
Dengan spesifikasi program diatas maka didapat algoritma program seperti dibawah ini:
Gambar 3.2 Flowchart Sistem Pergerakan Robot NXT
4. UJI COBA
Pada bab ini akan dibahas mengenai uji coba dan evaluasi perangkat lunak maupun perangkat keras. Uji coba perangkat keras meliputi uji coba dari gerak accelerometer, sensor kompas dan sensor ultrasonik, sedangkan pada perangkat lunak sistem dilakukan uji coba dari segi fungsionalitas dan performa dari sistem yang telah dibuat.

PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 6
4.1 Uji Coba Fungsionalitas
Uji coba fungsionalitas dilakukan untuk melihat apakah fungsi-fungsi dasar pada sistem dapat berjalan sebagaimana mestinya. Hasil uji coba pada uji fungsionalitas ini ditunjukkan dengan hasil screenshot dari uji coba yang dilakukan.
Pada uji coba fungsionalitas ini meliputi uji coba menjalankan sistem dan uji coba simulasi.
4.1.1 Uji Coba Menjalankan Sistem
Setelah sistem dibuat, hal yang harus dilakukan adalah uji coba sistem. Pertama pada Gambar 4.1 , koneksikan perangkat android ke laptop melalui media USB. Setelah dipastikan terkoneksi lakukan kompilasi sistem. Klik kanan pada project sistem, lakukan Run As Android Application. Gambar 4.2 menunjukkan cara kompilasi sistem.
Gambar 4.1 Koneksi USB Perangkat Android ke Laptop
Gambar 4.2 Kompilasi Sistem
Ketika sistem dikompilasi pada konsol eclipse akan keluar pesan jika sistem telah masuk ke perangkat andoid. Adapun pesan pada konsol tersebut ditunjukkan pada Gambar 4.3.
Gambar 4.3 Starting Activity pada Console Eclipse
Pada Gambar 4.4 adalah gambar sistem telah masuk ke perangkat android dan siap untuk dijalankan.
Gambar 4.4 Sistem Masuk ke Perangkat Android
Setelah sistem dimasukkan pada perangkat android, langkah selanjutnya adalah masukkan sebagian program ke dalam robot NXT. Lakukan koneksi robot NXT dengan laptop melalui media USB terlebih dahulu. Hal ini ditunjukkan pada Gambar 4.5.
Kemudian lakukan kompilasi program pada robot NXT. Adapun cara mengkompilasi, linking, dan upload sistem ke robot NXT sebagai berikut. Diperlukan terminal untuk melakukan ini. Gambar 4.6 menggambarkan proses tersebut.
nxjc <java-files> contoh : nxjc BTReceive.java
nxjlink –v BTReceive –o BTReceieve.nxj
nxjupload BTReceive.nxj Pada saat upload file nxj, robot NXT harus
dalam keadaan turn on. Upload file bisa menggunakan media bluetooth ataupun USB. Dalam tugas akhir ini penulis menggunakan media USB.
PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 7
Gambar 4.5 Koneksi USB Robot NXT dengan
Laptop
Gambar 4.6 Kompilasi dan Upload Sistem pada Robot NXT
Setelah sistem masuk ke robot NXT.
Lakukan eksekusi program NXT, masuk ke files kemudian pilih file nxj. Pada saat program dieksekusi, robot NXT akan mengeluarkan pesan waiting yang artinya sedang menunggu koneksi bluetooth yang akan masuk. Gambar 4.7 menggambarkan proses tersebut.
Gambar 4.7 Robot NXT Menunggu Koneksi Bluetooth
Selama robot NXT menunggu koneksi
bluetooth yang akan masuk. Masuk ke sistem pada perangkat android, lakukan koneksi bluetooth ke robot NXT. Gambar 4.8 dan Gambar 4.9 menggambarkan sistem pada perangkat android yang akan melakukan koneksi ke robot NXT.
Gambar 4.8 Sistem Requesting Turn On Bluetooth
Gambar 4.9 Pilih Robot NXT
Setelah antara robot NXT dan perangkat android saling terkoneksi, robot NXT bisa digerakkan dengan memanfaatkan sensor accelerometer pada perangkat andorid. Gambar 4.10 menggambarkan simulasi sistem pergerakkan robot NXT. Pada simulasi juga ditampilkan petunjuk orientation perubahan hadapan robot sesuai arah hadapan robot pada dunia nyata. Kemudian juga akan ditampilkan berapa jarak robot dengan didepan robot (dalam cm).
Gambar 4.10 Simulasi Sistem
4.2 Uji Coba Performa
Pada uji coba performa ini dilakukan dengan melakukan pengujian terhadap jangkauan bluetooth dalam melakukan pengendalian pada Robot NXT.
4.2.1 Uji Coba Jangkauan Bluetooth pada
Robot NXT Uji coba jangkauan bluetooth pada Robot
NXT ini sangat perlu dilakukan untuk dapat mengetahui berapakah jarak yang masih dapat ditoleransi oleh sistem sehingga sistem dapat menerima update data dari sensor kompas dan sensor ultasonik dengan baik dan juga mengetahui seberapa jauh jarak robot yang masih dapat dikendalikan melalui sistem yang telah dibuat. Pengukuran jarak jangkauan ini dilakukan dengan menggunakan roll meter.
Dari hasil uji coba yang dilakukan didapatkan jarak jangkauan bluetooth pada robot NXT ke bluetooth pada perangkat android yang mana baik sistem maupun robot masih dapat
PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 8
dikendalikan dengan baik adalah sejauh 18 meter. Pada jarak 20 meter robot masih dapat dikendalikan namun memiliki respon yang cukup lambat terhadap pengeksekusian perintah yang dilakukan oleh robot NXT ini.
Gambar 4.11 menunjukkan uji coba jangkauan bluetooth yang dilakukan didaerah yang lapang dan bebas dari halangan tembok yang dapat mempengaruhi konektivitas dari media bluetooth. Uji coba ini dilakukan di lingkungan Perumahan Laguna.
Gambar 4.11 Uji Coba Jangkauan
Bluetooth 4.3 Uji Coba Perangkat Keras
Uji coba Perangkat Keras yang dilakukan pada tugas akhir ini adalah uji coba terhadap sensor accelerometer, sensor kompas, dan sensor ultrasonik. Uji coba ini dilakukan untuk mengetahui bagaimana pengaruh lingkungan terhadap kinerja dari perangkat keras yang digunakan dan juga apakah perangkat keras ini berjalan sesuai dengan fungsi-fungsinya. Berikut uji coba yang dilakukan pada tugas akhir ini.
4.3.1 Uji Coba Sensor Acceleromter
Uji coba sensor accelerometer ini dilakukan untuk mengetahui apakah gerakan maju, mundur, belok kanan, dan kiri robot sesuai dengan simulasi pada sistem.
4.3.1.1 Gerak Maju
Gambar 4.12 menggambarkan bagaimana posisi perangkat android agar robot bergerak maju.
Gambar 4.12 Gerakan Maju
Ketika robot NXT digerakkan maju, maka sistem juga akan menunjukkan arah yang sama. Hal ini ditunjukkan pada Gambar 4.13.
Gambar 4.13 Simulasi pada saat maju
4.3.1.2 Gerak Mundur Gambar 4.14 menggambarkan bagaimana
menggerakan perangkat android agar robot bergerak mundur.
Gambar 4.14 Gerakan Mundur
Ketika robot NXT digerakkan mundur,
maka sistem juga akan menunjukkan arah yang sama. Hal ini ditunjukkan pada Gambar 4.15.
Gambar 4.15 Simulasi pada saat mundur
4.3.1.3 Belok Kanan Gambar 4.16 menggambarkan bagaimana
menggerakan perangkat android agar robot belok kanan.
Gambar 4.16 Gerakan Belok Kanan
PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 9
Ketika robot NXT belok kanan, maka sistem juga akan menunjukkan arah yang sama. Hal ini ditunjukkan pada Gambar 4.17.
Gambar 4.17 Simulasi pada saat belok kanan
4.3.1.4 Belok Kiri Gambar 4.18 menggambarkan bagaimana
menggerakan perangkat android agar robot belok kiri.
Gambar 4.18 Gerakan Belok Kiri
Ketika robot NXT belok kiri, maka sistem
juga akan menunjukkan arah yang sama. Hal ini ditunjukkan pada Gambar 4.19.
Gambar 4.19 Simulasi pada saat belok kiri
4.3.2 Uji Coba Sensor Kompas
Uji coba sensor kompas ini dilakukan dengan menempatkan robot NXT diatas sebuah lingkaran yang telah ditentukan derajatnya. Uji coba ini dilakukan untuk mengetahui apakah arah hadapan robot sesuai dengan simulasi pada sistem.
4.3.2.1 Uji Coba 1
Pada uji coba 1 ini robot NXT diletakkan pada posisi 0o dari arah hadapan robot. Hal ini ditunjukkan pada Gambar 4.20.
Gambar 4.20 Posisi 0 o dari arah hadapan
robot
Ketika robot NXT berada pada posisi 0o dari arah hadapan robot, sistem akan menunjukkan arah yang sama. Hal ini ditunjukkan pada Gambar 4.21.
Gambar 4.21 Simulasi saat posisi 0 o dari arah
hadapan robot
4.3.2.2 Uji Coba 2 Pada uji coba 2 ini robot NXT diletakkan
pada posisi 90o dari arah hadapan robot. Ditunjukkan pada Gambar 4.22.
Gambar 4.22 Posisi 90 o dari arah hadapan
robot Ketika robot NXT berada pada posisi 90o
dari arah hadapan robot, sistem akan menunjukkan arah yang sama. Hal ini ditunjukkan pada Gambar 4.23.
PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 10
Gambar 4.23 Simulasi saat posisi 90 o dari
arah hadapan robot
4.3.2.3 Uji Coba 3 Pada uji coba 3 ini robot NXT diletakkan
pada posisi 180o dari arah hadapan robot. Hal ini ditunjukkan pada Gambar 4.24.
Gambar 4.24 Posisi 180 o dari arah hadapan robot
Ketika robot NXT berada pada posisi 180o
dari arah hadapan robot, sistem akan menunjukkan arah yang sama. Hal ini ditunjukkan pada Gambar 4.25.
Gambar 4.25 Simulasi pada posisi 180 o dari
arah hadapan robot
4.3.2.4 Uji Coba 4 Pada uji coba 4 ini robot NXT diletakkan
pada posisi 270o dari arah hadapan robot. Hal ini ditunjukkan pada Gambar 4.26.
Gambar 4.26 Posisi 270 o dari arah hadapan
robot
Ketika robot NXT berada pada posisi 270o dari arah hadapan robot, sistem akan menunjukkan arah yang sama. Hal ini ditunjukkan pada Gambar 4.27.
Gambar 4.27 Simulasi pada posisi 270 o dari
arah hadapan robot
4.3.3 Uji Coba Sensor Ultrasonik Uji coba sensor ultrasonik ini dilakukan
dengan menempatkan robot NXT didepan sebuah rintangan. Uji coba ini dilakukan untuk mengetahui apakah jarak antara robot dengan rintangan sesuai dengan informasi yang diberikan oleh sistem. Gambar 4.28 menggambarkan robot NXT berhadapan dengan sebuah rintangan.
Gambar 4.28 Robot NXT berhadapan dengan
sebuah rintangan Setelah itu dilakukan pengukuran
menggunakan roll meter, nilai jarak antara robot NXT dengan rintangan adalah 87 centi meter ditunjukkan pada Gambar 4.29.

PAPER TUGAS AKHIR PERIODE JULI 2011
Fitranda Arys Pradana ‐ 5107100120 Page 11
Gambar 4.29 Pengukuran jarak antara robot dengan
rintangan
Ketika robot NXT menemui rintangan didepannya, maka pada sistem akan memberikan informasi berapa jarak antara robot NXT dengan rintangan didepannya (dalam cm). Hal ini ditunjukkan pada Gambar 4.30.
Gambar 4.30 Simulasi jarak antara robot dengan rintangan yang ditemui robot
5. KESIMPULAN
Kesimpulan yang dapat diambil dari hasil pengamatan selama perancangan, implementasi, dan proses uji coba sistem yang dilakukan adalah sebagai berikut : 1. Sistem yang telah berhasil membuat
simulasi yang mampu menggambarkan pergerakan sebuah robot. Pembangunan sistem ini dibuat dengan beberapa langkah mulai dari perancangan sampai implementasi.
2. Sistem ini telah berhasil melakukan koneksi antara perangkat android dengan robot NXT melalui media bluetooth.
3. Sistem ini telah berhasil melakukan pengendalian robot NXT dengan memanfaatkan sensor accelerometer pada perangkat android.
4. Sistem ini telah berhasil melakukan pembacaan sensor kompas dengan baik.
5. Sistem ini telah berhasil melakukan pembacaan sensor ultrasonik dengan baik
6. SARAN
Dalam pembuatan Tugas Akhir ini, terdapat beberapa kemungkinan pengembangan sistem dan hardware robot yang dilakukan, yaitu: 1. Sistem ini dapat dikembangkan menjadi
sebuah sistem yang mampu melakukan simulasi 3D.
2. Menggunakan media komunikasi yang lain selain bluetooth seperti wifi untuk menambah jarak jangkauan pengendalian robot.
7. DAFTAR PUSTAKA
[1] Siyamta, 2008. Pengantar Teknologi Bluetooth Artikel Populer Ilmukomputer.com, <URL:http://ilmukomputer.org/2008/11/25/pengantar-teknologi-bluetooth/>.
[2] Igos Center Bandung, 2009. LEGO Mindstorm NXT dan Komponennya, <URL:http://saung.igoscenter.org/LEGO_Mindstorm_NXT>.
[3] Anonim, 2008. Robot Mindstorm NXT dan Komponennya, <URL:http://legomindstorm.wordpress.com/2008/05/30/lego-mindstorms-nxt-robot-kit/>.
[4] Anonim, 2009. Hitechnic Magnetic Compass Sensor, <URL:http://www.hitechnic.com/cgi-bin/commerce.cgi?preadd=action&key=NMC1034>.
[5] Gunawan, 2006. Teknologi Bluetooth, <URL:http://elcom.umy.ac.id/elschool/muallimin_muhammadiyah/file.php/1/materi/Teknologi_Informasi/Komunikasi%20Data%20Bluetooth.doc>.
[6] Anonim, 2010. Android Developers, <URL:http://developer.android.com/index.html>.
[7] Anonim, 2011. Sensor Accelerometer, <URL:http://en.wikipedia.org/wiki/Accelerometer>.
[8] Anonim, 2008. LeJOS Java For Lego Mindstroms, <URL:http://lejos.sourceforge.net/>.
Related Documents











