Deep Learning for Robots Raia Hadsell www.raiahadsell.com

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Deep Learning for Robots
Raia Hadsellwww.raiahadsell.com

The story:
1. Deep Learning is the future of robotics
2. There are very significant challenges
3. But some solutions emerging, as well.

2010: Speech Recognition
Audio → Acoustic Model → Phonetic Model → Language Model → Text
2012: Computer Vision
Pixels → Key Points → SIFT features → Deformable Part Model → Labels
2014: Machine Translation
Text → Reordering → Phrase Table/Dictionary → Language Model → Text
2017: Robotics?
Sensors → Perception → World Model → Planning → Control → Action
End-to-end Deep Learning for robots?
slide from V. Vanhoucke

2010: Speech Recognition
Audio → Acoustic Model → Phonetic Model → Language Model → Text
2012: Computer Vision
Pixels → Key Points → SIFT features → Deformable Part Model → Labels
2014: Machine Translation
Text → Reordering → Phrase Table/Dictionary → Language Model → Text
2017: Robotics?
Sensors → Perception → World Model → Planning → Control → Action
Deep Net
End-to-end Deep Learning for robots?
slide from V. Vanhoucke
Deep Net
Deep Net
Deep Net

General Artificial Intelligence
Robotics is different
LABELS

General Artificial Intelligence
Robotics is different
ACTIONSSENSORS

General Artificial Intelligence
EnvironmentAgent
Reinforcement Learning
GOALOBSERVATIONS
ACTIONS
REWARD?

General Artificial Intelligence
EnvironmentAgent
Deep Reinforcement Learning
GOALOBSERVATIONS
ACTIONS
REWARD?
neural network
General Artificial Intelligence
● Sensorimotor control ?
Could deep RL allow robots to learn end-to-end?

Space Invaders
[Mnih et al, Playing Atari with Deep Reinforcement Learning, 2014]
https://www.youtube.com/watch?v=wHDxF5N700Q

General Atari Player
[Mnih et al, Playing Atari with Deep Reinforcement Learning, 2014]
https://www.youtube.com/watch?v=Erkt7HelEco

General Artificial Intelligence
● Sensorimotor control
Could deep RL allow robots to learn end-to-end?

General Artificial Intelligence
● Sensorimotor control
● Exploration of complex spaces ?
Could deep RL allow robots to learn end-to-end?


General Artificial Intelligence
● Sensorimotor control
● Exploration of complex spaces
Could deep RL allow robots to learn end-to-end?

General Artificial Intelligence
● Sensorimotor control
● Exploration of complex spaces
● Strategy and decision making ?
Could deep RL allow robots to learn end-to-end?


General Artificial Intelligence
Policy Network Value Network

General Artificial Intelligence
Lesson: use supervised learning when possible
Human expertpositions
Supervised Learningpolicy network
Reinforcement Learningpolicy network
Generates New Data(30 mil. Positions)
Value network
Self Play Self Play

General Artificial Intelligence
● Sensorimotor control
● Exploration of complex spaces
● Strategy and decision making
Could deep RL allow robots to learn end-to-end?

General Artificial Intelligence
Not so fast …
● Deep RL is very data inefficient -
how can it learn on real robots?
So, where are the superhuman robots?
24 hours in simulation with 16 threads …… 55 days on the real Jaco arm
General Artificial Intelligence
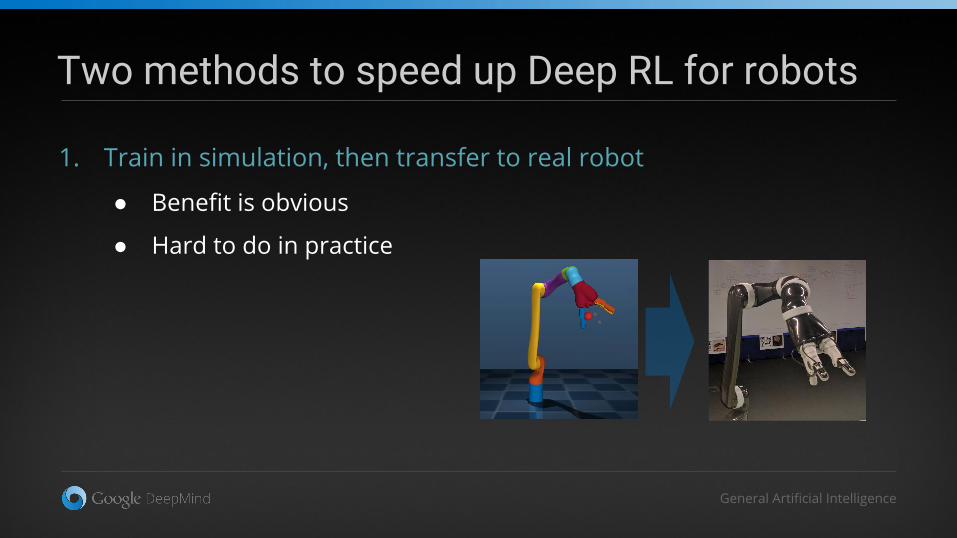
1. Train in simulation, then transfer to real robot
● Benefit is obvious
● Hard to do in practice
Two methods to speed up Deep RL for robots

General Artificial Intelligence
Progressive Neural Networks
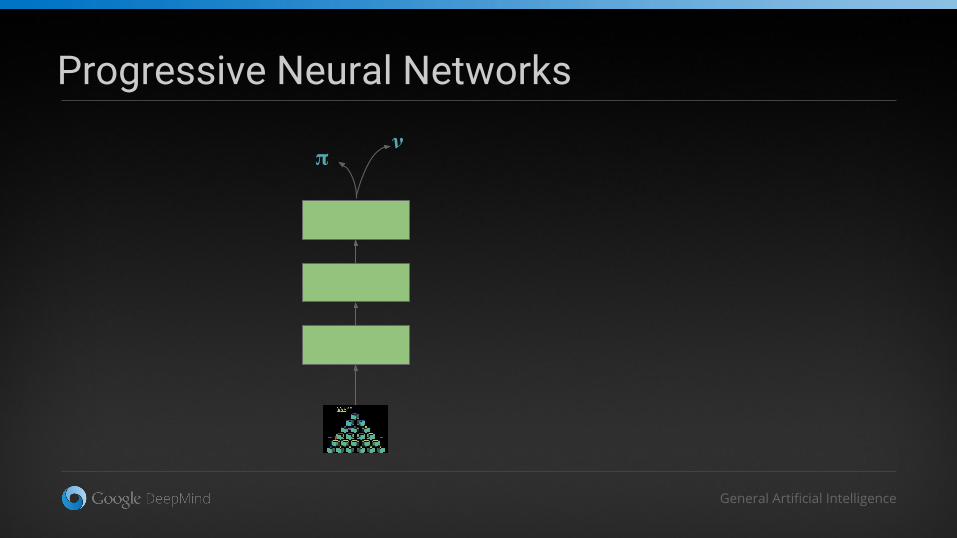
General Artificial Intelligence
Progressive Neural Networks

General Artificial Intelligence
11
22
a
a
Progressive Neural Networks

General Artificial Intelligence
11
22
33
a
a
a
a
a
a
Progressive Neural Networks

Sim-to-Real

Sim-to-Real1
12
23
3
Simulation Robot
Task A Task A Task B

General Artificial Intelligence
Sim-to-Real: 3d reacher
https://www.youtube.com/watch?v=YZz5Io_ipi8
11
128
22
a
a
a
16

General Artificial Intelligence
Sim-to-Real: 2d reacher with moving target 1
12
23
3
128 16 16
www.youtube.com/watch?v=e78J1K5LKCI
arxiv.org/abs/1606.04671 arxiv.org/abs/1610.04286v1
Andrei Rusu Neil C. Rabinowitz
Guillaume Desjardins
Hubert Soyer
James Kirkpatrick
Koray Kavukcuoglu
Razvan Pascanu
Progressive Neural Networks
Sim-to-Real Robot Learning from Pixels
NicolasHeess
Raia Hadsell

General Artificial Intelligence
2. Learn with auxiliary tasks● Accelerate and stabilise reinforcement learning
Two methods to speed up Deep RL for robots

General Artificial Intelligence
Navigation mazes Game episode:
1. Random start2. Find the goal (+10)3. Teleport randomly4. Re-find the goal (+10)5. Repeat (limited time)
+10 +1

General Artificial Intelligence
Nav agent ingredients:
1. Convolutional encoder and RGB inputs
2. Stacked LSTM
3. Additional inputs (reward, action, and velocity)
4. RL: Asynchronous advantage actor critic (A3C)
5. Auxiliary task 1: Depth predictor
6. Auxiliary task 2: Loop closure predictor enc
Loop (L)
Depth (D1 )
xt rt-1 {vt, at-1}
Depth (D2 )
[Mnih et al, Asynchonous Methods for Deep Reinforcement Learning, 2016]

Variations in architecture
xt rt-1 {vt, at-1}
enc
xt
enc enc
Loop (L)
Depth (D1 )
a. FF A3C c. Nav A3C d. Nav A3C +D1D2L
xt rt-1 {vt, at-1}
enc
xt
b. LSTM A3C
Depth (D2 )

Results: Results: Auxiliary tasks speed up RL ten-fold!


Piotr Mirowski, Razvan Pascanu, Raia Hadsell
Fabio Ross Andy Hubert Laurent Koray Dharsh Misha Andrea
Learning to navigate in complex environments
arxiv.org/abs/1611.03673

The story:
1. Deep Learning is the future of robotics
2. There are very significant challenges
3. But some solutions emerging, as well.
Thank you!We are hiring! [email protected], [email protected]
Related Documents











