i QUANTITATIVE ANALYSIS OF MASTICATORY PERFORMANCE IN VERTEBRATES By SRIKANTH KANNAN August, 2008 A thesis submitted to the Faculty of the Graduate School of the State University of New York at Buffalo in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Department of Mechanical and Aerospace Engineering State University of New York at Buffalo Buffalo, New York 14260

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
i
QUANTITATIVE ANALYSIS OF MASTICATORY PERFORMANCE IN VERTEBRATES
By
SRIKANTH KANNAN
August, 2008
A thesis submitted to the Faculty of the Graduate School of the State University of New York at Buffalo in partial fulfillment of the requirements
for the degree of
MASTER OF SCIENCE
Department of Mechanical and Aerospace Engineering State University of New York at Buffalo
Buffalo, New York 14260

ii
Acknowledgement First, I would like to express my sincerest gratitude to my advisor, Dr. Venkat Krovi, for
giving me an opportunity to work under him as a Research Assistant. He was not only my
mentor, but as a friend, he always provided me with valuable suggestions whenever I
needed them most. I would like to express my gratitude to the committee members, Dr.
Frank Mendel and Dr. Andres Soom for serving on my thesis committee and reading
through my thesis and providing me with valuable suggestions.
I would like to thank Dan Murray, Bill McDougall, Brian Wolf, and David Eley for
giving me an opportunity to work with Fisher-Price, Inc and for giving me access to the
3D laser scanner and SLA machine. I would like to thank my lab members Rajan, Chin
Pei Tang, Leng-Feng Lee, Anand Naik, Kun Yu, Hao Su, Qiushi Fu, Yao Wang and
Patrick Miller for lending me an helping hand whenever I needed it the most. I convey
my special thanks to Madu for being my project partner right from the first semester till
the end of my thesis. I would also like to thank my roommates Arun, Sriniwas, Vijay,
Parthiban, Govind, Amol for providing good support and entertainment at home.
And especially I would to thank my parents, Mr. K.R. Kannan and Mrs. K.
Vijayalakshmi and my other family members Priya, Kumar, Adeep, Ayush and
Rajeshwari for being affectionate and encouraging me right throughout my education.
THANKYOU ALL ONCE AGAIN

iii
Abstract To quantitatively measure mechanical performance signals such as forces and motions
and mechanical breakdown of food during mastication, it is imperative to accurately
reproduce the mastication motion. Reproduction of the mastication motion of a vertebrate
with a robotic device will allow us to estimate muscle and bite forces required for
different animals while chewing/biting different regimen and relate them to masticatory
muscle recruitment patterns and would be used to quantitatively evaluate the dynamic
breakdown of foods during chewing, which is vital information required in the
development of new pet foods. We also examine the use of a robotic solution where a
generic parallel manipulator with six degrees of freedom (Stewart platform) was modeled
and simulated using virtual prototyping tools to reproduce the 3D mandible trajectory. To
this end, a high fidelity (speed/resolution) motion capture system was used for capture the
3D mastication motion of different vertebrates. 3D laser scanning technology and image
processing techniques were used to obtain CAD model of a skull and mandible of a
bulldog which was then rapidly prototyped and casted to create a dentition. Architectural
parameters of muscle for a human jaw were obtained from Koolstra et al. and for a
bulldog jaw by conducting dissection of masticatory muscles. A musculoskeletal model
of the vertebrate jaw was created in AnyBody Modeling System to measure the forces
acting in the masticatory muscles and temporomandibular joints. We formulate and verify
the forward dynamics of the Stewart platform using three methods: 1. S-Function in
Simulink 2. DynaFlexPro model 3. Visual Nastran Plant. A combination of Newton-Euler
and Lagrangian method was used to formulate the inverse dynamics of a 6 DOF parallel
manipulator. Feedback linearization was implemented in Matlab/Simulink, using the
inverse dynamics and forward dynamics block, to control the motion of the moving
platform. Actuator forces were determined by implementing vertebrate mastication
trajectory as inverse dynamics using Matlab/Simulink and Visual Nastran. Results from
the inverse dynamic simulations and motion control of the Stewart platform show that the
Stewart platform enables the mastication motion to be reproduced.
iv
TABLE OF CONTENTS Acknowledgement ......................................................................................... ii Abstract......................................................................................................... iii LIST OF FIGURES .................................................................................... vii LIST OF TABLES ...................................................................................... xii 1. Introduction............................................................................................ 1
1.1 Motivation................................................................................................................. 1 1.2 Virtual Prototyping/ Simulation Based Design......................................................... 4 1.3 Musculoskeletal System Analysis............................................................................. 7 1.4 Research Tasks........................................................................................................ 10 1.5 Thesis Organization ................................................................................................ 11
2. Literature Survey................................................................................. 12
2.1 Masticatory Biomechanics...................................................................................... 12 2.1.1 Jaw Muscles and Movements .......................................................................... 12 2.1.2 Redundancy...................................................................................................... 13 2.1.3 Dynamics of Masticatory System .................................................................... 13 2.1.4. Influence of Muscles and Hill Muscle Model................................................. 14 2.1.5 Active and Passive Elements ........................................................................... 15
2. 2 Medical Imaging and Rapid Prototyping............................................................... 16 2.3 Motion Capture Analysis ........................................................................................ 19 2.4 Jaw Motion Simulators ........................................................................................... 22 2.5 Parallel Manipulators .............................................................................................. 30
3. Mathematical Background.................................................................. 31
3.1 Kinematic Analysis:................................................................................................ 33 3.2 Velocity and Acceleration Analysis: ...................................................................... 34 3.3 Jacobian Analysis.................................................................................................... 37
3.3.1 Jacobian Matrix Based On Vector Loop Closure Equation............................. 37 3.3.2 Screw Theory Based Jacobian Analysis .......................................................... 39
3.4 Jacobian-Based Performance Measures (JBPM).................................................... 42 3.4.1 Singular Value Decomposition (SVD) and Manipulability Ellipsoid ............. 42 3.4.2 Yoshikawa’s Measure of Manipulability......................................................... 44 3.4.3 Condition Number ........................................................................................... 44 3.4.4 Isotropy Index .................................................................................................. 45
3.5 Dynamic Analysis................................................................................................... 45 3.6 Feedback Linearization........................................................................................... 48

v
3.7 Musculoskeletal System Analysis........................................................................... 50 4. Technological tools............................................................................... 52
4.1 Laser Scanning Technology.................................................................................... 52 4.1.1 Why 3D Scanning? .......................................................................................... 52 4.1.2 Different Types of 3D Scanning Technology [50]: ......................................... 53 4.1.3 Commercial Scanners ...................................................................................... 54 4.1.4 Generation of CAD Model of Vertebrate Skull and Mandible........................ 57
4.2 CT Scanning Technology ....................................................................................... 59 4.3 Rapid Prototyping and Casting ............................................................................... 63 4.4 Motion Capture Analysis Technology .................................................................... 65
4.4.1 Digitizing ......................................................................................................... 68 4.4.2 Transformation................................................................................................. 68 4.4.3 DLT.................................................................................................................. 71 4.4.4 Technical Aspects for Transformation............................................................. 71
4.5 Musculoskeletal Model of Vertebrate Jaw ............................................................. 73 4.6 CAD Model of Stewart platform Type 6 DOF Parallel Manipulator ..................... 82 4.7 Forward Dynamics Model in DynaFlexPro............................................................ 84
5. Simulation & Results ........................................................................... 93
5.1 Inverse Dynamic Analysis of Human Jaw Model in Anybody Modeling System. 93 5.1.1 Case Study I: One Temporalis Muscle and Muscle Model I and No External Force ......................................................................................................................... 94 5.1.2 Case Study II: Three Temporalis Muscles and Muscle Model I and No External Force........................................................................................................... 97 5.1.3. Case Study III: One Temporalis Muscle, Muscle Model 3E, No External Force ......................................................................................................................... 99 5.1.4 Case Study IV: Three Temporalis Muscles, Muscle Model 3E, No External Force ....................................................................................................................... 101
5.1.5 Case Study V: Three Temporalis Muscles, Muscle Model 3E, With External Force ........................................................................................................................... 104 5.2 Inverse Dynamic Analysis of Bulldog Jaw model in AnyBody........................... 107 5.3 Inverse Dynamic Analysis of Sabertooth Jaw Model in Anybody....................... 111 5.4 Manipulability Measures for Workspace Analysis............................................... 113
5.4.1 Case Study I: Varying the Radius of the Moving platform ........................... 114 5.4.2 Case Study II: Varying Radius of the Workspace ......................................... 117 5.4.3 Case Study III: Varying the Vertical Distance between Two platforms ....... 119
5.5 Dynamic Simulation of Stewart platform............................................................. 120 5.5.1 Simulation Using S-Function:........................................................................ 123 5.5.2 Simulation Using DynaFlexPro Model: ........................................................ 126
5.6 Simulation of the CAD Model of Stewart platform: ............................................ 129 5.6.1 Simulation Using DynaFlexPro Model.......................................................... 130 5.6.2 Simulation Using S-Function Block .............................................................. 131 5.6.3 Simulation Using Visual Nastran Plant ......................................................... 132
vi
5.7 Simulation of Jaw Motion Using Visual Nastran ................................................. 135 5.7.1 Dynamic Simulation of First Human Subject Jaw motion ............................ 136 5.7.2 Dynamic Simulation of Second Human Subject Jaw motion........................ 139 5.7.3 Dynamic Simulation of Bulldog Subject Jaw motion.................................... 141 5.7.4 Dynamic Simulation of Sabertooth Cat Jaw motion...................................... 143
6. Conclusion and Future Work ........................................................... 145
6.1 Conclusion ............................................................................................................ 145 6.2 Future work........................................................................................................... 147
Bibliography .............................................................................................. 149
vii
LIST OF FIGURES Figure 1-1: Development of Simulation Tools in Engineering .......................................... 2 Figure 1-2: Measure-Estimate-Test cycle........................................................................... 3 Figure 1-3: Vertebrate Mastication Motion Simulator Framework.................................... 3 Figure 1-4: Virtual Prototyping [4]..................................................................................... 5 Figure 1-5: Virtual Prototype of Piston (Left from Visual Nastran) and sabertooth Tiger (Right) [1] ........................................................................................................................... 5 Figure 1-6: Increase in Complexity of Musculoskeletal Modeling [1] [2] ......................... 8 Figure 1-7: Musculoskeletal system modeled as Articulated Multi-Body System with Redundancy [1]................................................................................................................... 9 Figure 1-8: Conventional Design Approach ....................................................................... 9 Figure 1-9: Virtual Prototyping Approach.......................................................................... 9 Figure 2-1: Human Masticatory Muscles [18].................................................................. 14 Figure 2-2: Dog Masticatory Muscles .............................................................................. 14 Figure 2-3: Elements of Hill Muscle Model [2] ............................................................... 15 Figure 2-4: Force Length profile of CE, SE and PE elements [2] .................................... 15 Figure 2-5: Force Length and Force-Velocity curve for two muscles with different mass [44].................................................................................................................................... 16 Figure 2-6: Force Length and Force-Velocity curve for two muscles with different fiber length [44]......................................................................................................................... 16 Figure 2-7: Framework of 3D Scanning Technology ....................................................... 17 Figure 2-8: 3D model of the Patient Skull [14] ................................................................ 18 Figure 2-9: Point cloud processed and surface reconstruction of the tray [14] ................ 18 Figure 2-10: SLA model and Titanium Prosthesis [14].................................................... 18 Figure 2-11: Cantilevered Maxillary Implant designed using a stereolithography biomodel [13].................................................................................................................... 19 Figure 2-12: Stresses in Shell Body Prosthesis [13]......................................................... 19 Figure 2-13: Motion Capture Setup with Experimental Devices [11].............................. 20 Figure 2-14: Markers positioning and figure of special pointer on Human Subject [11]. 20 Figure 2-15: The new facebow attached to a Human Subject [16]................................... 20 Figure 2-16: Snapshots of the display system [16]........................................................... 20 Figure 2-17: Ultrasonic Jaw Motion Analyzer (JMA) from Zebris GmbH [15] .............. 21 Figure 2-18: 3D jaw animation in 3D Studio Max [15].................................................... 21 Figure 2-19: CT images of the cranial part [17] ............................................................... 22 Figure 2-20: The optical 3D tracking device Polaris [17] ................................................ 22 Figure 2-21: Dry Skull for Validation Experiment [17] ................................................... 22 Figure 2-22: A display of the result of 4-dimensional analysis [17] ................................ 22 Figure 2-23: Jaw opening and closing Cycle [20] [21]..................................................... 23 Figure 2-24: Kinematic Structure of Jaw [18] [19] .......................................................... 24 Figure 2-25: SimMechanics model of Robotic chewing device [18] [19]........................ 24 Figure 2-26: Physical robot of the mastication system with Linear Actuation [21] ......... 25 Figure 2-27: Physical Kinematic model of Robotic Jaw [21]........................................... 25 Figure 2-28: Robotic Chewing Device with Crank Actuation [23].................................. 26 Figure 2-29: Co-ordinate System of RSS Linkage [23].................................................... 26 Figure 2-30: One leg of the RSS linkage [24] .................................................................. 26 Figure 2-31: WY series [31] ............................................................................................. 27
viii
Figure 2-32: WJ Series [22].............................................................................................. 28 Figure 2-33: WJ robots [22].............................................................................................. 28 Figure 2-34: JSN/2A Simulator [26]................................................................................. 29 Figure 2-35: Six bar linkage for chewing simulation [20]................................................ 29 Figure 2-36: Robotic Chewing Device [20]...................................................................... 29 Figure 3-1: Universal Joint Angles [35] ........................................................................... 31 Figure 3-2: 6DOF Stewart platform [33] .......................................................................... 31 Figure 3-3: Vector Loop of one Leg [33] ......................................................................... 31 Figure 3-4: Prismatic Actuators [33] ................................................................................ 31 Figure 3-5: Screw Co-ordinate Theory ............................................................................. 39 Figure 3-6: Manipulability Ellipsoid [34]......................................................................... 43 Figure 4-1: Sample ATOS 3D scanner generated point cloud and STL polygonal mesh images [45]........................................................................................................................ 52 Figure 4-2: Simplified serial depiction of an iterative generic Concept through Sustaining Engineering Process [45] .................................................................................................. 53 Figure 4-3: 3D Digitizer from Immersion ........................................................................ 53 Figure 4-4: Co-ordinate Measuring Machine ................................................................... 53 Figure 4-5: NextEngine Scanner [46] ............................................................................... 56 Figure 4-6: NextEngine Scanned Teeth Model [46]......................................................... 56 Figure 4-7: ATOS 3D Laser Scanner................................................................................ 57 Figure 4-8: ATOS Laser Scanner ..................................................................................... 58 Figure 4-9: Object painted in Grey color.......................................................................... 58 Figure 4-10: Scanning mandible in Capture3D ................................................................ 58 Figure 4-11: Scanned model in Capture3D ...................................................................... 58 Figure 4-12: Surface patches and holes in the geometry .................................................. 58 Figure 4-13: Cleaned Geometry in Geomagics ................................................................ 58 Figure 4-14: Scannning skull in Capture3D ..................................................................... 59 Figure 4-15: Scanned model in Capture3D ...................................................................... 59 Figure 4-16: Surface patches and holes in geometry ........................................................ 59 Figure 4-17: Cleaned geometry in Geomagics ................................................................. 59 Figure 4-18: Importing tiff images into MIMICS............................................................. 61 Figure 4-19: Setting Image and Pixel information ........................................................... 61 Figure 4-20:Specify the Orientation ................................................................................. 61 Figure 4-21: Calculate 3D to get 3D model...................................................................... 62 Figure 4-22: 3D model of bulldog .................................................................................... 62 Figure 4-23: STL import................................................................................................... 63 Figure 4-24: Importing medium resolution STL .............................................................. 63 Figure 4-25: CAD model of bulldog in Pro/E .................................................................. 64 Figure 4-26: SLA model of Bulldog................................................................................. 64 Figure 4-27: Rapid Prototype model of mandible ............................................................ 64 Figure 4-28: Rapid Prototype model of bulldog skull ...................................................... 64 Figure 4-29: Casting of the bulldog Skull and Mandible ................................................. 64 Figure 4-30: Calibration Grid from one camera view ...................................................... 66 Figure 4-31: Calibration Grid from Second Camera ........................................................ 66 Figure 4-32: Specifying the 3D Co-ordinates of the Calibration Points........................... 67 Figure 4-33: Checking the Calibration System for accuracy............................................ 67
ix
Figure 4-34: Specifying the Marker Points....................................................................... 67 Figure 4-35: Motion Capture Snapshot of a Human Subject............................................ 67 Figure 4-36 : Calibration box in three views .................................................................... 68 Figure 4-37: Calibration Grid (Left) and Motion Capture of a dog (Right) ..................... 69 Figure 4-38: Digitizing Canine for determinning Trajectory of mandible in Side Camera........................................................................................................................................... 70 Figure 4-39: Digitizing Canine for determinning Trajectory of mandible in Front Camera........................................................................................................................................... 70 Figure 4-40: Stick Figure of Mandible motion ................................................................. 70 Figure 4-41: 3D co-ordinates of RightTMJ, LeftTMJ and FrontIncisor .......................... 70 Figure 4-42:Transformation of Skull in Rhino ................................................................. 74 Figure 4-43: Transformation of mandible......................................................................... 74 Figure 4-44: Dissection of masticatory muscles (Left) and weighing muscle mass (Right)........................................................................................................................................... 76 Figure 4-45: Skull and Mandible model of bulldog.......................................................... 77 Figure 4-46: Human Jaw model in AnyBody ................................................................... 77 Figure 4-47: Human Skull and Mandible model in different views ................................. 78 Figure 4-48: sabertooth Cat Model ................................................................................... 79 Figure 4-49: Mandible model in top view ........................................................................ 79 Figure 4-50: Mandible model in front view...................................................................... 79 Figure 4-51: Script for Specifying the Joints.................................................................... 80 Figure 4-52: Muscle Attachment Points for bulldog skull and mandible......................... 80 Figure 4-53: Script for Specifying the drivers and Motion Capture data ......................... 81 Figure 4-54: Script for Specifying Muscle Models .......................................................... 81 Figure 4-55: Script for Specifying the Muscle Parameters............................................... 82 Figure 4-56: Linmot Linear Motors.................................................................................. 82 Figure 4-57: CAD model of Stewart platform in Solidworks........................................... 83 Figure 4-58: Forward Dynamic model of Stewart platform in Visual Nastran ................ 84 Figure 4-59: Forward Dynamic model of Stewart platform in DynaFlexPro................... 86 Figure 4-60: Upper and Fixed Body Frame properties..................................................... 87 Figure 4-61: Actuator Frame Properties ........................................................................... 87 Figure 4-62: Mass and Inertia of all the bodies ................................................................ 88 Figure 4-63: Universal Joint Angles ................................................................................. 88 Figure 4-64: Universal Joint Properties ............................................................................ 89 Figure 4-65: Prismatic and Spherical Joint properties...................................................... 89 Figure 4-66: Force Driver for actuators ............................................................................ 90 Figure 4-67: Free joint and Co-ordinate Selection properties .......................................... 90 Figure 4-68: Model Construction and Equation of Motion Generation ........................... 91 Figure 4-69: Simulink Block Generation.......................................................................... 92 Figure 4-70: Simulink Block Diagram to find state variables .......................................... 92 Figure 5-1: Representation of Case Studies in 3D............................................................ 94 Figure 5-2: Plot of Muscle Force and TMJ Reaction Force for Case I............................. 95 Figure 5-3: Plot of Muscle Activities for Case I............................................................... 96 Figure 5-4: Plot of Muscle Force and TMJ Reaction Force for Case II ........................... 98 Figure 5-5: Plot of Muscle Activities for Case II ............................................................. 99 Figure 5-6: Plot of Muscle Force and TMJ Reaction force for Case III......................... 100
x
Figure 5-7: Plot of Muscle Activities for Case III .......................................................... 101 Figure 5-8: Plot of Muscle Force and TMJ Reaction Force for Case IV........................ 103 Figure 5-9: Plot of Muscle Activities for Case IV.......................................................... 104 Figure 5-10: Plot of Muscle Forces and TMJ Reaction Forces for Case V.................... 105 Figure 5-11: Plot of Muscle Activities for Case V ......................................................... 106 Figure 5-12: Plot of Muscle Force and TMJ Reaction Force for Bulldog Jaw w/o Bite Force ............................................................................................................................... 108 Figure 5-13: Plot of Muscle Activities for bulldog Jaw w/o Bite Force......................... 109 Figure 5-14: Plot of Muscle Forces & Activities and TMJ Reaction Forces of Bulldog jaw with Bite Force................................................................................................................ 111 Figure 5-15: Plot of Muscle Force and TMJ Reaction Force for Sabertooth Jaw .......... 112 Figure 5-16: Plot of Muscle Activities for Sabertooth Jaw ............................................ 113 Figure 5-17: Plot of Manipulability Measures for r=0.125m ......................................... 116 Figure 5-18: Plot of Manipulability Measures for r=0.15m ........................................... 116 Figure 5-19: Plot of Manipulability Measures for r=0.2m ............................................. 117 Figure 5-20: Plot of Manipulability Measures for R=60mm.......................................... 118 Figure 5-21: Plot of Manipulability Measures for R=100mm and 200mm.................... 119 Figure 5-22: Plot of Manipulability Measures Height=200mm ..................................... 120 Figure 5-23: Plot of Manipulability Measures for Height=300mm................................ 120 Figure 5-24: Plot of Actuator Force without Mass (Left) and with Mass of Legs (Right) for Case I......................................................................................................................... 121 Figure 5-25: Plot of Actuator Force without Mass (Left) and with Mass of Legs (Right) for Case II ....................................................................................................................... 122 Figure 5-26: Simulink Diagram for Simulation using S-Function ................................. 124 Figure 5-27: Actuator Forces for Case I using S-Function............................................. 125 Figure 5-28: Stewart platform Tracking Line (Left) and Error Plot (Right) for Case I.. 125 Figure 5-29: Actuator Forces for Case II using S-Function ........................................... 126 Figure 5-30: Stewart platform Tracking Line (Left) and Error Plot (Right) for Case II 126 Figure 5-31: Simulink Diagram using DynaFlexPro Model........................................... 127 Figure 5-32: Plot of Actuator Forces for Case I (Left) and Case II (Right) ................... 128 Figure 5-33: Error Plot (Left) and Stewart platform Tracking Line (Right) for Case I.. 128 Figure 5-34: Error Plot (Left) and Stewart platform Tracking Line (Right) for Case II 128 Figure 5-35: CAD model of Stewart platform in Solidworks......................................... 130 Figure 5-36: Simulink diagram with DynaFlexPro model (Left) and Actuator Force plot (Right) ............................................................................................................................. 130 Figure 5-37: Stewart platform tracking a Circle (Left) and Error plot (Right) using DFP model............................................................................................................................... 131 Figure 5-38: Simulink diagram with S-Function block (Left) and Actuator Force plot (Right) ............................................................................................................................. 132 Figure 5-39: Stewart platform tracking a Circle (Left) and Error plot (Right) using S-Function .......................................................................................................................... 132 Figure 5-40: Simulink diagram with Visual Nastran block (Left) and Actuator Force plot (Right) ............................................................................................................................. 134 Figure 5-41: Stewart platform tracking a Circle (Left) and Error plot (Right) using VN model............................................................................................................................... 134 Figure 5-42: Transformation from Base to Moving platform......................................... 135
xi
Figure 5-43: Transformation from Origin of Calibration to moving reference frame.... 135 Figure 5-44: Vectors along Marker Points...................................................................... 135 Figure 5-45: Stewart platform Tracking Jaw motion...................................................... 137 Figure 5-46: Trajectory tracked by Stewart platform ..................................................... 137 Figure 5-47: Trajectory of the Front Incsior from Motion Analysis .............................. 137 Figure 5-48: Actuator Force Plot for External Force of 0N (T-L), 50N (T-R), 100N (B-L), 200N (B-R)................................................................................................................ 138 Figure 5-49: Stewart platform tracking Human Jaw motion in Visual Nastran ............. 138 Figure 5-50: Plot of Actuator Stroke (Left) and Actuator Velocity (Right) for Human Jaw......................................................................................................................................... 139 Figure 5-51: Trajectory tracked by Stewart platform (Left) and Front Incisor Trajectory (Right) ............................................................................................................................. 139 Figure 5-52: Plot of Actuator Stroke (Left) and Actuator Velocity (Right) for Human Jaw II...................................................................................................................................... 139 Figure 5-53: Actuator Force Plot for External Force of 0N (T-L), 50N (T-R), 100N (B-L), 200N (B-R) ..................................................................................................................... 140 Figure 5-54: Platform tracking Human Jaw Motion in Visual Nastran.......................... 140 Figure 5-55: Trajectory tracked by Stewart platform (Left) and Front Incisor Trajectory (Right) of Bulldog........................................................................................................... 141 Figure 5-56: Actuator Forces for External Force of 0N (T-L), 100N (T-R), 200N (B-L), 400N (B-R) ..................................................................................................................... 142 Figure 5-57: Platform tracking Bulldog Jaw motion in Visual Nastran ......................... 142 Figure 5-58: Plot of Actuator Stroke (Left) and Actuator Velocity (Right) for Bulldog Jaw .................................................................................................................................. 142 Figure 5-59: Trajectory tracked by Stewart platform (Left) and Front Incisor Trajectory (Right) of Sabertooth ...................................................................................................... 143 Figure 5-60: Actuator Forces for External Force of 0N (T-L), 100N (T-R), 500N (B-L), 1000N (B-R) ................................................................................................................... 144 Figure 5-61: Platform tracking Sabertooth Jaw motion in Visual Nastran..................... 144 Figure 5-62: Actuator Stroke for Sabertooth Jaw........................................................... 144
xii
LIST OF TABLES Table 4-1: NextEngine Specifications .............................................................................. 55 Table 4-2: ATOL Laser Scanner Specifications............................................................... 56 Table 4-3: Muscle Parameters of Human Model.............................................................. 75 Table 4-4: Muscle Relative % Weights of Canine and Felis ............................................ 76 Table 4-5: Muscle Parameters of Bulldog Model............................................................. 76 Table 4-6: Muscle Parameters of Sabertooth Model ........................................................ 77 Table 4-7: Mass and Inertia of Mandible.......................................................................... 77

1
1. Introduction 1.1 Motivation
The goal of this project is to quantitatively measure mechanical performance signals such
as forces, motions and pressures during mastication with the intent of subsequently
characterizing mechanical breakdown of food in various vertebrates (including humans).
Such an understanding would be of tremendous importance from a variety of
perspectives. From a science perspective, it is useful to know how various animals
(including humans) preprocess the food for subsequent digestion. From an economic
perspective it potentially enables food manufacturing/processing companies to design and
process foods based on the “chewability index”. Such knowledge could potentially enable
the orthotists design, develop, fit and manufacture dental orthoses to support or correct
musculoskeletal deformities and or abnormalities of vertebrate jaws.
To aid us in this process of quantitatively measuring various mechanical output
parameters such as force/motion/pressure, we will examine use of current technological
tools and paradigms in measure-estimate-test cycle as shown in Figure 1-2 by a
combination of “Virtual Prototyping” and “Physical Prototyping”. In the last decade, the
science and engineering domains have been revolutionized by the ubiquitous availability
of computational power coupling with the advances in computational tools, algorithms
and methodologies as depicted in Figure 1-1 [1]. While the engineering-related fields
have seen the greatest benefits, the lack of significant and advanced computational
biomechanical tools has hindered progress in other arenas such as the biological sciences.
Such tools could potentially assist biologists to perform various parametric “what if” type
analyses to test various hypotheses.
However, there exist several problems when expanding into and exploring other scientific
domains such as biological sciences. However, these fields are now poised to take
advantage of the systematic and parametric techniques developed in the engineering
realm to enhance the ability of biological scientists to analyze study and verify theories
and hypotheses. For instance, it is difficult to model and simulate a living tissue, muscle,
2
tendon and ligament when compared to the far simpler mechanical systems. In particular,
the inhomogeneity and irregularity that is the norm in biological specimens necessitates
considerable biomechanical expertise for accurate modeling and simulations. In this
project, we explore the use of advanced virtual prototyping simulation tools for analyzing
both mechanical as well as biological multi-body systems. From a mechanical
engineering viewpoint we analyze 6DOF parallel manipulators for reproducing
mastication motion using virtual prototyping tools and determine the actuator forces and
mastication performance. From a biological viewpoint, a musculoskeletal model of the
vertebrate jaw will be created and analyzed to determine muscles forces required for
various biting tasks. We examine this in greater detail specifically using the case studies
of bite force measurement and masticatory performance measurement in vertebrates as
shown in Figure 1-3.
Figure 1-1: Development of Simulation Tools in Engineering
3
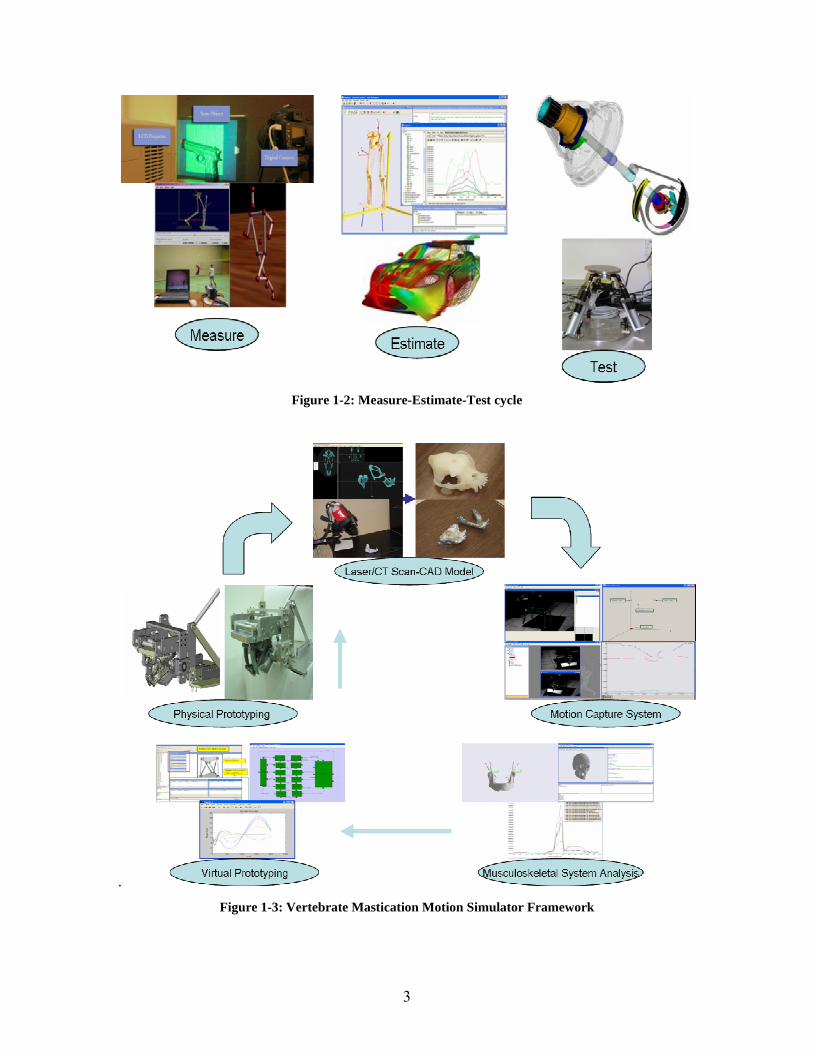
Figure 1-2: Measure-Estimate-Test cycle
. Figure 1-3: Vertebrate Mastication Motion Simulator Framework

4
1.2 Virtual Prototyping/ Simulation Based Design
“Virtual prototyping refers to computer based virtual simulation and analysis of a
physical system through various stages of its product cycle. Various aspects of design,
analyses, manufacturing, service and recycling can now be examined completely in the
context of a Virtual Prototype”. [4]
Virtual prototyping empowers engineers by eliminating the expensive process of
fabrication and testing physical prototypes as seen in Figure 1-4 and Figure 1-5. Through
virtual prototyping it is now beneficial to create, estimate/simulate and test these digital
prototypes before the fabrication and reduce the overall design cycle time. In a nutshell it
refers to the process of simulating the product and perform quantitative and performance
analysis of the product [2] [5]. Simulation based design allows parametric analysis to be
performed on these prototypes and can be refined by integrating with CAE and CAM
simulation tools. The integration of these conceptual designs with the CAE simulation
tools enables quantitative measurement of performance characteristics and their
integration with the CAM simulation tool enable the engineer to overcome challenges
regarding manufacturability of the product. These parametric simulations enable
engineers to identify the parameters affecting quality, performance, manufacturability,
cost etc and quantify the parameter interactions and interdependencies. In short, VP tools
are used to virtually create, estimate, test, validate and manage product designs within a
virtual environment to identify complex product process interdependencies and
parameters early in the product development cycle and thus reducing the cycle cost and
time. Some of the advantages of using VP techniques [2] include its ability to accelerate
and improve the product life cycle, its use as a tool for testing and analyzing various
“what if” scenarios and its ability to develop the final physical prototype without the need
for further modifications. VP is limited by things such as the accuracy of the analysis
results for a virtual prototype depends on factors like, the skill of the designer,
availability of computational power and level of detail. Further, as the intricacy of the
system increases, the effort, skill and the computational power required for developing a
virtual prototype increases exponentially.

5
Figure 1-4: Virtual Prototyping [4]
Figure 1-5: Virtual Prototype of Piston (Left from Visual Nastran) and
Sabertooth Cat (Right) [1]
In the context of mastication studies, quantities that need to be measured are 3D co-
ordinates of the skull and the mandible from CT scan or laser scan, 3D co-ordinates of
the front incisor point during the entire mastication process using a non invasive multiple
camera motion capture system. For example, virtual and physical models of various
animals can be re-created from CT scans of fossils or living animals and through the use
of computational simulation tools. A high resolution CT scan image can be converted to a
CAD model using the various image processing techniques such as segmentation,
thresholding and surface/volume rendering. Alternatively a physical model of a skull or a
mandible can be scanned using a state-of-the-art laser scanner to measure the 3D co-
ordinates of the physical object and form a cloud of points. This cloud of points can then
6
be processed to generate a CAD model. Both these two methodologies allows for the
conversion of CT scan image (image processing) or a physical model into a CAD model
(reverse engineering) which can then serve the purpose of measuring and locating the
muscle attachment points and other architectural parameters of muscles. In this case it is
essential to use high fidelity (speed/resolution) motion capture system to track and
measure 3D co-ordinates of the jaw movement precisely of the vertebrates (including
humans) to allow subsequent analysis of various masticatory behaviors.
The next step is to estimate the forces/stresses/motions/pressures acting in the
muscles/actuators and joints during the mandibular movement. Computer simulation can
now be used to calculate the kinematic, dynamic and FEA based responses of a prototype
and the results obtained can be visualized in a 3D interactive virtual environment using
classical inverse dynamics and forward dynamics principle. Since deriving the equations
of motion analytically for such a complicated 6DOF system is tedious, we can utilize
technological simulation tools such as Visual Nastran, SimMechanics, AnyBody
Modeling System, and DynaFlexPro etc. These tools allow us to solve the inverse
dynamics and forward dynamics problem and compute all the mechanical output
quantities. In this way we can perform kinematic and dynamic analysis of the robotic
chewing mechanism, inverse dynamic analysis of musculoskeletal systems using these
tools and estimate the required mechanical signal.
Ultimately we seek to design, fabricate and test various virtual and physical prototypes. It
is useful to develop a virtual prototype of the robotic jaw mechanism, perform “what if”
type simulations, test hypotheses and validate the design. Results of these forward
dynamic simulations can help size the actuators of the 6DOF parallel mechanism and
perform the desired mastication movement precisely. At the same time testing the
physical prototype will enable capture all the effects which cannot be achieved by virtual
testing. The physical bite force test rig can then be controlled to reproduce the
mastication behavior for characterizing the mechanical breakdown of foods and
quantitatively assessing the masticatory performance.
7
1.3 Musculoskeletal System Analysis
“Biomechanics is the science concerned with the internal and external forces and
moments acting on the human body and the effects produced by these forces and
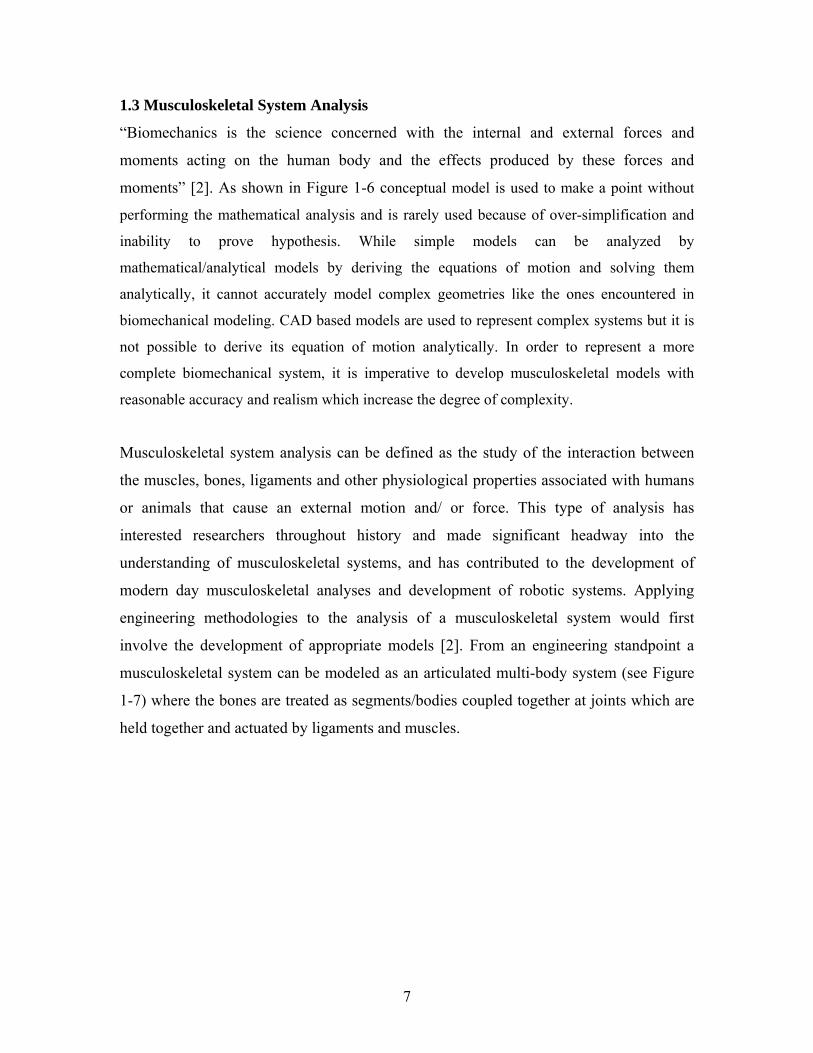
moments” [2]. As shown in Figure 1-6 conceptual model is used to make a point without
performing the mathematical analysis and is rarely used because of over-simplification and
inability to prove hypothesis. While simple models can be analyzed by
mathematical/analytical models by deriving the equations of motion and solving them
analytically, it cannot accurately model complex geometries like the ones encountered in
biomechanical modeling. CAD based models are used to represent complex systems but it is
not possible to derive its equation of motion analytically. In order to represent a more
complete biomechanical system, it is imperative to develop musculoskeletal models with
reasonable accuracy and realism which increase the degree of complexity.
Musculoskeletal system analysis can be defined as the study of the interaction between
the muscles, bones, ligaments and other physiological properties associated with humans
or animals that cause an external motion and/ or force. This type of analysis has
interested researchers throughout history and made significant headway into the
understanding of musculoskeletal systems, and has contributed to the development of
modern day musculoskeletal analyses and development of robotic systems. Applying
engineering methodologies to the analysis of a musculoskeletal system would first
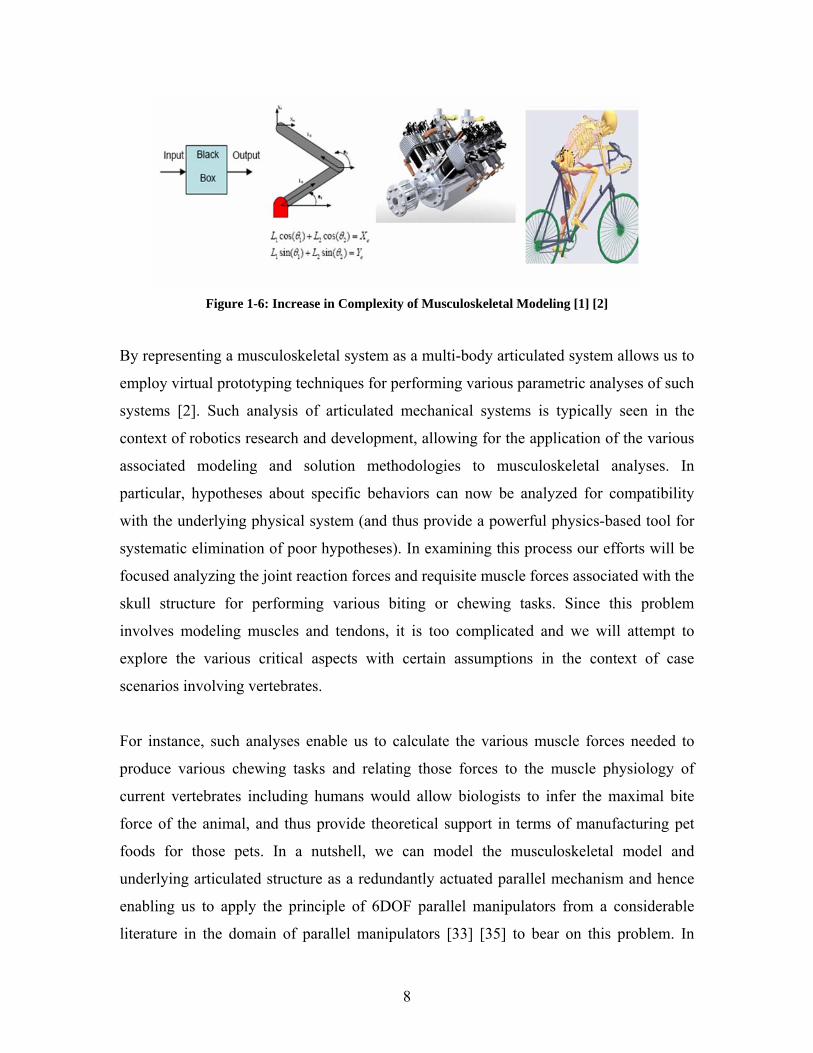
involve the development of appropriate models [2]. From an engineering standpoint a
musculoskeletal system can be modeled as an articulated multi-body system (see Figure
1-7) where the bones are treated as segments/bodies coupled together at joints which are
held together and actuated by ligaments and muscles.
8
Figure 1-6: Increase in Complexity of Musculoskeletal Modeling [1] [2]
By representing a musculoskeletal system as a multi-body articulated system allows us to
employ virtual prototyping techniques for performing various parametric analyses of such
systems [2]. Such analysis of articulated mechanical systems is typically seen in the
context of robotics research and development, allowing for the application of the various
associated modeling and solution methodologies to musculoskeletal analyses. In
particular, hypotheses about specific behaviors can now be analyzed for compatibility
with the underlying physical system (and thus provide a powerful physics-based tool for
systematic elimination of poor hypotheses). In examining this process our efforts will be
focused analyzing the joint reaction forces and requisite muscle forces associated with the
skull structure for performing various biting or chewing tasks. Since this problem
involves modeling muscles and tendons, it is too complicated and we will attempt to
explore the various critical aspects with certain assumptions in the context of case
scenarios involving vertebrates.
For instance, such analyses enable us to calculate the various muscle forces needed to
produce various chewing tasks and relating those forces to the muscle physiology of
current vertebrates including humans would allow biologists to infer the maximal bite
force of the animal, and thus provide theoretical support in terms of manufacturing pet
foods for those pets. In a nutshell, we can model the musculoskeletal model and
underlying articulated structure as a redundantly actuated parallel mechanism and hence
enabling us to apply the principle of 6DOF parallel manipulators from a considerable
literature in the domain of parallel manipulators [33] [35] to bear on this problem. In
9
particular, such musculoskeletal systems share a number of features with a subclass of
parallel manipulators. Hence in this thesis, we have attempted to model a musculoskeletal
model of vertebrate jaw as well as a 6DOF Stewart platform manipulator for reproducing
jaw motion and performing further quantitative analysis of mastication efficiency.
Figure 1-7: Musculoskeletal system modeled as Articulated Multi-Body System with Redundancy [1]
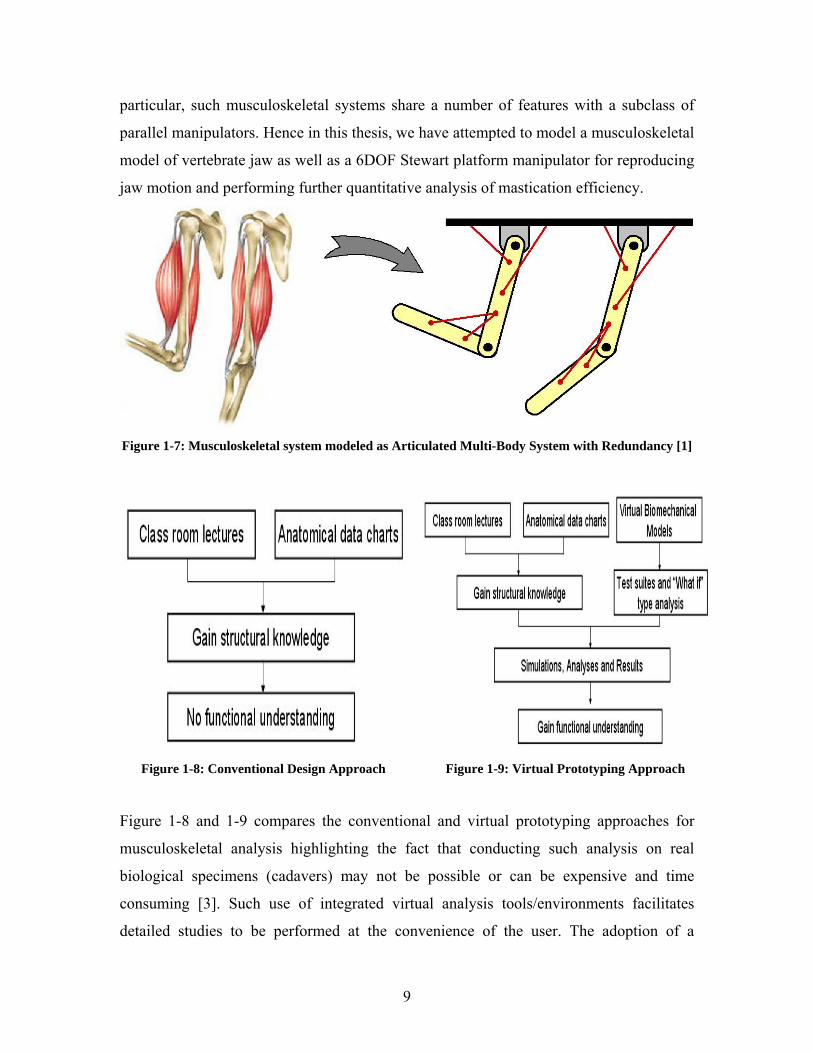
Figure 1-8: Conventional Design Approach Figure 1-9: Virtual Prototyping Approach
Figure 1-8 and 1-9 compares the conventional and virtual prototyping approaches for
musculoskeletal analysis highlighting the fact that conducting such analysis on real
biological specimens (cadavers) may not be possible or can be expensive and time
consuming [3]. Such use of integrated virtual analysis tools/environments facilitates
detailed studies to be performed at the convenience of the user. The adoption of a
10
computational-analysis paradigm is beneficial from the viewpoint of helping with
improved quantitative conceptualization and understanding of the anatomical system and
its behavior. In such a setting, a series of simulation based–studies can be developed in
the form of “what if” type problems with a clear emphasis on systematic generation,
evaluation and elimination of choices.
1.4 Research Tasks
The various research tasks discussed previously are summarized briefly below and help
set the scope of this thesis.
1. CT Scanning and conversion into CAD models:
• CAD models of bulldog mandible and skull was generated from laser
scanning of a physical object using the laser scanner technology and from
CT scan image using the image processing technology. CAD models of a
bulldog were converted to physical models by rapidly prototyping,
molding and casting. These dentitions could potentially be mounted on top
of the moving platform of a parallel manipulator to reproduce jaw motion.
2. Motion Capture System:
• Mastication motions of humans and animals (bulldog) were captured using
high fidelity (resolution/speed) video camera based motion capture
system. The 3D co-ordinates of the front incisor point will serve as the
input trajectory for quantitatively assessing the masticatory performance.
3. Analysis of articulated musculoskeletal systems:
• A musculoskeletal model of bulldog jaw was created using AnyBody
Modeling system for performing inverse dynamic analysis to evaluate the
muscle forces and joint reaction forces.
4. Virtual Prototyping:
• A CAD model of a 6DOF Stewart platform based jaw simulator was
created in SolidWorks. Visual Nastran/DynaFlexPro was used to evaluate
the workspace of the moving platform, perform kinematic/dynamic
analyses and determine force characteristics of prismatic actuators to
reproduce the chewing action. Various “what if” type analyses will be
11
performed using a parametric study to determine the functional
performance of the virtual prototype within a virtual environment.
5. Design, fabrication and testing of bite force test rig:
• The preliminary design of the full fledged jaw motion simulator intended
to reproduce the chewing action of vertebrates (including humans) was
undertaken. This physical prototype is being developed to test will be
tested for different chewing actions and different regimens to
quantitatively assess the jaw motion performance and mechanical
breakdown of foods.
To tie all these disparate aspects together, we will be considering specific case studies of
humans and animals and analyze the functional performance of masticatory efficiency
and mechanical breakdown of food.
1.5 Thesis Organization
We discuss the biomechanics of the human masticatory system and the prior work done
by researchers in the use of 3D scanning, motion capture analysis and jaw motion
simulators in Chapter 2. In Chapter 3 we briefly discuss the mathematical framework
underlying inverse dynamic analysis of Stewart platform and musculoskeletal jaw model.
All the technological tools used for this thesis will be explained with examples in Chapter
4 while the simulation results are presented in Chapter 5. Finally we conclude this report
with a discussion of future work in Chapter 6.
12
2. Literature Survey 2.1 Masticatory Biomechanics
The human masticatory system consists of a lower jaw (mandible) connected to an upper
jaw (maxilla) by two very complex shaped incongruent jaw joints, the
temporomandibular joints (TMJ) and cannot be approximated as a ball and socket joint to
prevent loss of functionality and are guided by the contraction of the muscle of
mastication. The masticatory system consists of a large number of muscles of various
shapes and sizes and co-operates to perform a certain task [10]. Furthermore, the articular
surfaces are separated by a cartilaginous articular disc which is able to move more or less
freely between these surfaces and affect the movements of the jaw. There are powerful
tools like SIMM, AnyBody for developing musculoskeletal models and such framework
can be used to explore masticatory dynamics. In this thesis we will be exploring the
inverse dynamic analysis of a vertebrate jaw model in AnyBody to determine muscle and
joint reaction forces during mastication.
2.1.1 Jaw Muscles and Movements
More than 20 muscles are involved in the process of mastication that is controlled by the
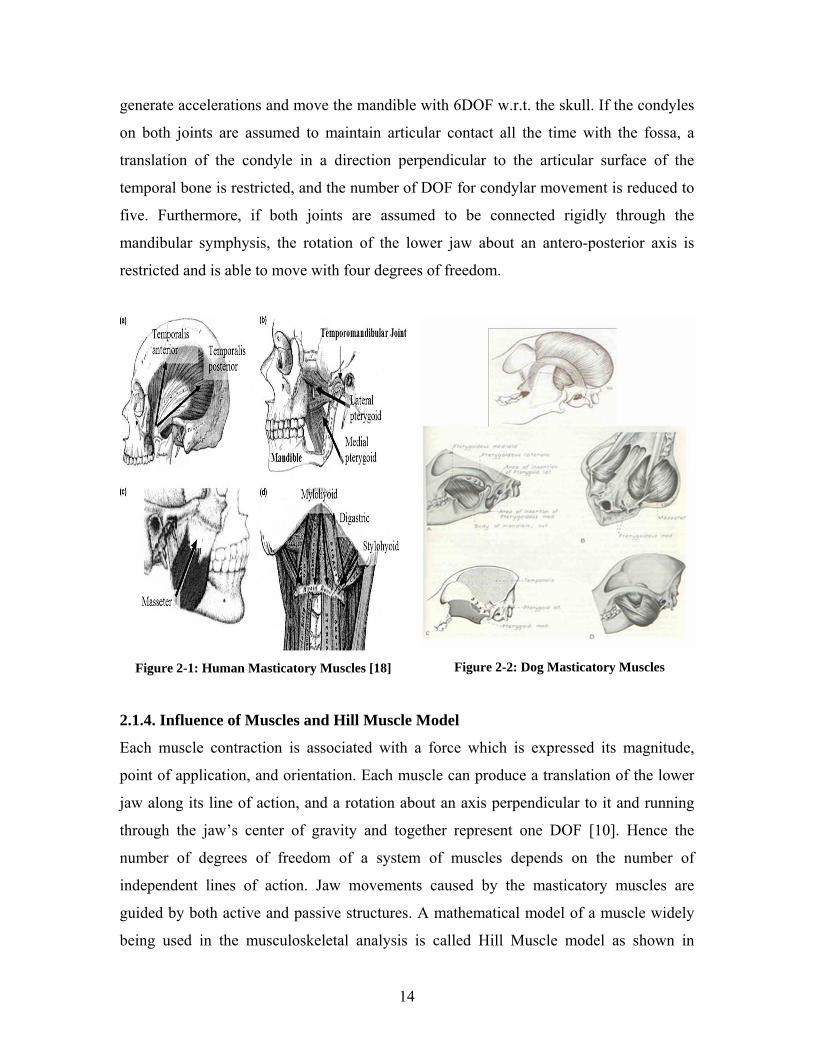
central nervous system as shown in Figure 2-1 and 2-2 [18]. Anatomically, the muscles of
mastication are divided into elevators (masseter, temporalis, and medial pterygoid
muscles) and depressors (geniohyoid, mylohyoid, and digastric muscles). The elevator
group consists of the masseter and temporalis muscles, which are located more or less
superficially, and the medial pterygoid muscle, which is located more deeply. The
muscles of the depressor group are located in the floor of the mouth. The digastrics
muscles connect the mastoid process of the skull with the body of the mandible and are
attached to the hyoid bone via a fibrous loop which runs around its intermediate tendon.
The lateral pterygoid muscle consisting of a superior and inferior head completes the
muscular system. These muscles cannot be termed as elevator or depressor since both
heads are considered to have different actions. The elevator muscles which are heavily
pinnate are suitable for generation of large forces due to their large physiological cross-
sectional areas. But these fibers are short thus limiting their capacity for active shortening
13
during contraction. The depressor muscles and the lateral pterygoid have more or less
parallel fibers and are therefore able to contract over a longer distance with less force.
The temporalis muscle, as shown in Figure 2-1 and 2-2 is a large, flat muscle and its
fibers can be divided into the anterior fibers that elevate the mandible (lower jaw) and
close the mouth and the posterior fibers which contribute to the complex grinding
movement by retracting the mandible. In a generic sense, the temporalis muscles are
oriented are at angles of 0 degrees, 45 degrees and 90 degrees. The lateral pterygoids
work to protract the mandible and open the mouth, and medial pterygoids mostly
protracts the mandible. The masseter, as shown in Figure 2-1 and 2-2 is a flat
quadrilateral muscle with deep and superficial parts contributing mostly to the mandible
elevation (mouth closing), and also plays a role in protracting the mandible. Human
chewing behavior can be described by the clenching and the grinding movements of
mandible. Clenching consists of the successive elevation and depression of the mandible.
The Figure 2-2 below shows the muscle structure in a dog. It can be clearly seen that the
tendon length in dogs is very small and can be approximated as 5% of muscle fiber
length.
2.1.2 Redundancy
Since the DOF of the TMJ are smaller than the number of muscles of mastication, the
human chewing system is kinematically redundant [10] [18]. Hence the same desired
trajectory of the mandible can be achieved with an infinite number of different muscle
recruitment patterns. Although it is not required in a mechanical perspective, redundancy
is present to satisfy the spatial requirements of the construction of the muscular system
with respect to the adjacent airway and alimentary tract. We will be employing
optimization criteria for minimizing the maximum muscle activity to solve this
redundancy problem and is described in Chapter 4 and 5.
2.1.3 Dynamics of Masticatory System
The dynamics of a moving lower jaw are expressed by its position, velocity, and
acceleration and its movements are caused by active and passive forces generated by
joints and ligaments acting on the jaw [7] [8] [10]. The resultant forces and torques
14
generate accelerations and move the mandible with 6DOF w.r.t. the skull. If the condyles
on both joints are assumed to maintain articular contact all the time with the fossa, a
translation of the condyle in a direction perpendicular to the articular surface of the
temporal bone is restricted, and the number of DOF for condylar movement is reduced to
five. Furthermore, if both joints are assumed to be connected rigidly through the
mandibular symphysis, the rotation of the lower jaw about an antero-posterior axis is
restricted and is able to move with four degrees of freedom.
Figure 2-1: Human Masticatory Muscles [18]
Figure 2-2: Dog Masticatory Muscles
2.1.4. Influence of Muscles and Hill Muscle Model
Each muscle contraction is associated with a force which is expressed its magnitude,
point of application, and orientation. Each muscle can produce a translation of the lower
jaw along its line of action, and a rotation about an axis perpendicular to it and running
through the jaw’s center of gravity and together represent one DOF [10]. Hence the
number of degrees of freedom of a system of muscles depends on the number of
independent lines of action. Jaw movements caused by the masticatory muscles are
guided by both active and passive structures. A mathematical model of a muscle widely
being used in the musculoskeletal analysis is called Hill Muscle model as shown in
15
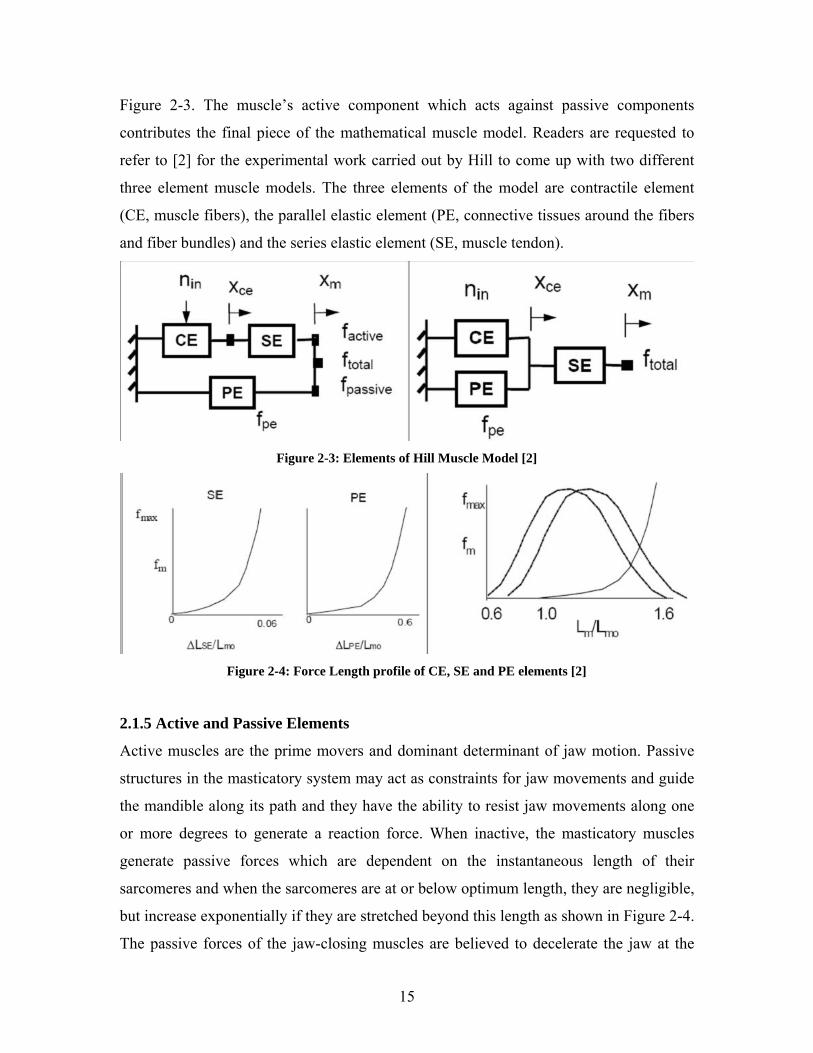
Figure 2-3. The muscle’s active component which acts against passive components
contributes the final piece of the mathematical muscle model. Readers are requested to
refer to [2] for the experimental work carried out by Hill to come up with two different
three element muscle models. The three elements of the model are contractile element
(CE, muscle fibers), the parallel elastic element (PE, connective tissues around the fibers
and fiber bundles) and the series elastic element (SE, muscle tendon).
Figure 2-3: Elements of Hill Muscle Model [2]
Figure 2-4: Force Length profile of CE, SE and PE elements [2]
2.1.5 Active and Passive Elements
Active muscles are the prime movers and dominant determinant of jaw motion. Passive
structures in the masticatory system may act as constraints for jaw movements and guide
the mandible along its path and they have the ability to resist jaw movements along one
or more degrees to generate a reaction force. When inactive, the masticatory muscles
generate passive forces which are dependent on the instantaneous length of their
sarcomeres and when the sarcomeres are at or below optimum length, they are negligible,
but increase exponentially if they are stretched beyond this length as shown in Figure 2-4.
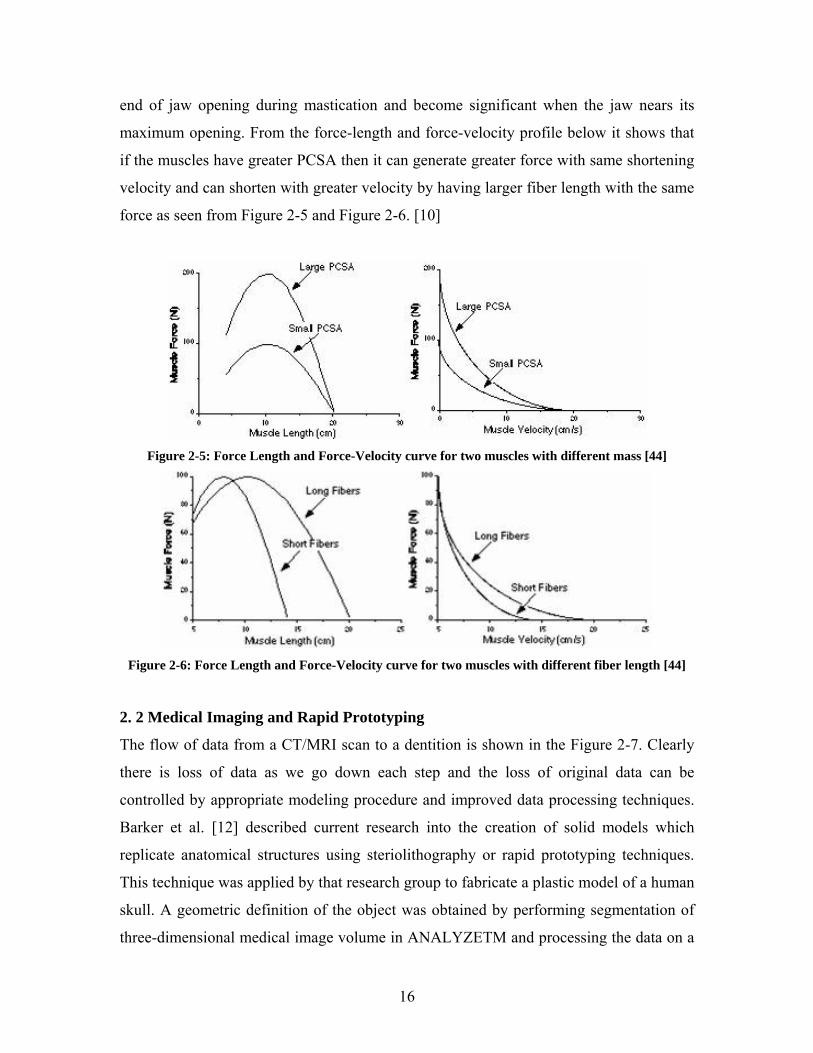
The passive forces of the jaw-closing muscles are believed to decelerate the jaw at the
16
end of jaw opening during mastication and become significant when the jaw nears its
maximum opening. From the force-length and force-velocity profile below it shows that
if the muscles have greater PCSA then it can generate greater force with same shortening
velocity and can shorten with greater velocity by having larger fiber length with the same
force as seen from Figure 2-5 and Figure 2-6. [10]
Figure 2-5: Force Length and Force-Velocity curve for two muscles with different mass [44]
Figure 2-6: Force Length and Force-Velocity curve for two muscles with different fiber length [44]
2. 2 Medical Imaging and Rapid Prototyping
The flow of data from a CT/MRI scan to a dentition is shown in the Figure 2-7. Clearly
there is loss of data as we go down each step and the loss of original data can be
controlled by appropriate modeling procedure and improved data processing techniques.
Barker et al. [12] described current research into the creation of solid models which
replicate anatomical structures using steriolithography or rapid prototyping techniques.
This technique was applied by that research group to fabricate a plastic model of a human
skull. A geometric definition of the object was obtained by performing segmentation of
three-dimensional medical image volume in ANALYZETM and processing the data on a

17
computer graphics workstation. A 3-D triangular-mesh was generated and converted to a
STL format suitable for processing and construction of a SLA model.
Figure 2-7: Framework of 3D Scanning Technology
In the recent years, the combination of biomedical image processing and rapid
prototyping techniques has proven to be a very important development for computed
aided implant design and fabrication. With advanced biomedical image processing
software and hardware, an image of an undamaged bone similar to that of the subject can
be made from computerized tomography (CT); and a physical object can be constructed
quickly using a SLA/RP machine. Lohfeld et al. [14] presented a methodology for the
design and fabrication of a SLA model of an individual titanium tray in a RP machine as
shown in Figure 2-10 for the repair of mandible defects. A 3D model of the bony defect
as shown in Figure 2-8 and Figure 2-9 is generated using thresholding and region
growing method after the acquisition of helical CT scan data obtained from General
Electric CT scanner. The IGES format of this segmented region was exported into reverse
engineering software “DigiSurf” for surface reconstruction.
Singare et al. [13] applied the rapid prototyping (RP) and rapid manufacturing (RM)
technique for engineering assisted surgery since it enables manufacturing of customized
implants and prostheses prior to surgical procedures. Beginning with CT or MRI scans, a
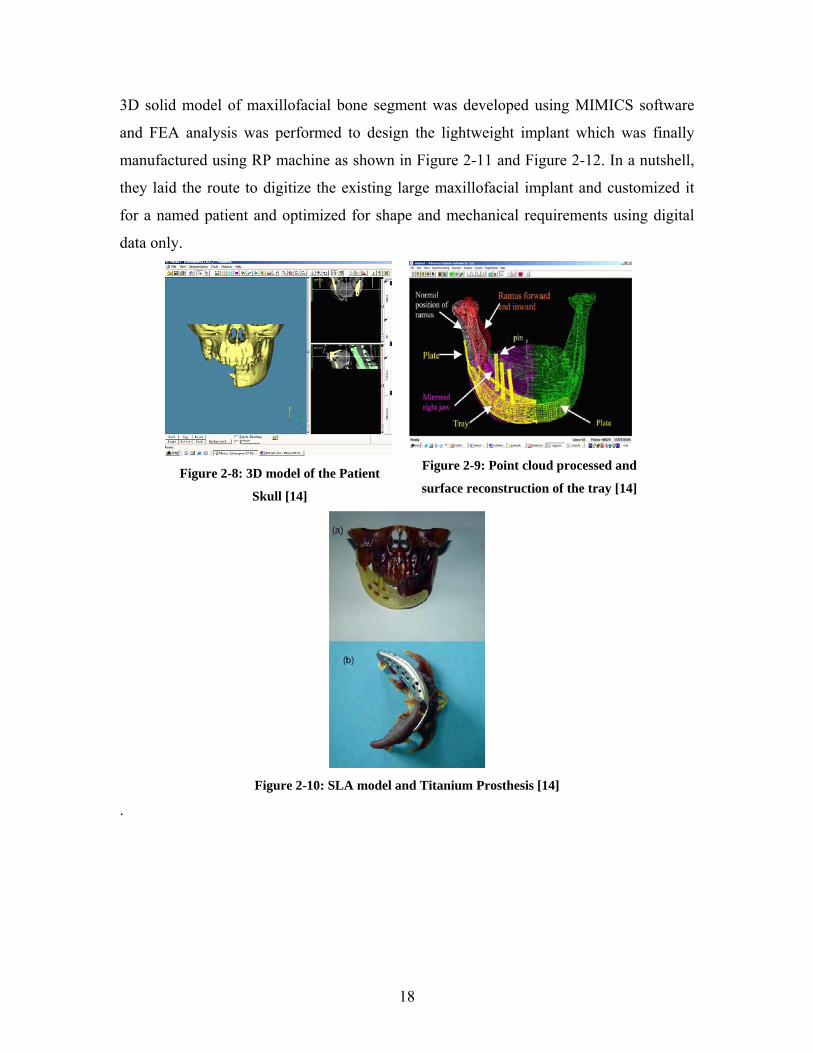
18
3D solid model of maxillofacial bone segment was developed using MIMICS software
and FEA analysis was performed to design the lightweight implant which was finally
manufactured using RP machine as shown in Figure 2-11 and Figure 2-12. In a nutshell,
they laid the route to digitize the existing large maxillofacial implant and customized it
for a named patient and optimized for shape and mechanical requirements using digital
data only.
Figure 2-8: 3D model of the Patient
Skull [14]
Figure 2-9: Point cloud processed and
surface reconstruction of the tray [14]
Figure 2-10: SLA model and Titanium Prosthesis [14]
.

19
Figure 2-11: Cantilevered Maxillary Implant
designed using a stereolithography biomodel
[13]
Figure 2-12: Stresses in Shell Body
Prosthesis [13]
2.3 Motion Capture Analysis
As far as biomechanical motion analysis is concerned, researchers have used motion
capture systems and analysis primarily for gait study of humans and animals. Use of
motion capture analysis for tracking mandibular movement has been studied and applied
mainly for the analysis of jaw movement as a measure for clinical diagnosis and
treatment of prosthodontics, orthodontics, and oral surgery. For biomechanical analysis
of mastication performance and evaluation of food breakdown, motion analysis has been
recently studies by group at Massey University. Goldmann et al. [11] has used motion
analysis to describe the trajectory of the human mandible in 3D as seen from Figure 2-14.
They used Sony digital camcorder as shown in Figure 2-13 to record the motion of
human jaw in 3D and used APAS motion capture analysis software for video sequence
processing, digitizing and for 3D transformation of the lower jaw movement into 3D co-
ordinates using direct linear transformation. They propose to use this trajectory data for
analysis of contact pressure and bite forces during mastication. Norio Inou et al. [16]
propose a display system as shown in Figure 2-15 and Figure 2-16 that visualizes motion
of the human mandible by capturing mandibular movements using optical markers and
CCD cameras and provide quantitative information of time series of position, velocity
and acceleration.. They used CT scan of the patient for creating a patient specific
program.

20
Figure 2-13: Motion Capture Setup with
Experimental Devices [11] Figure 2-14: Markers positioning and figure of
special pointer on Human Subject [11]
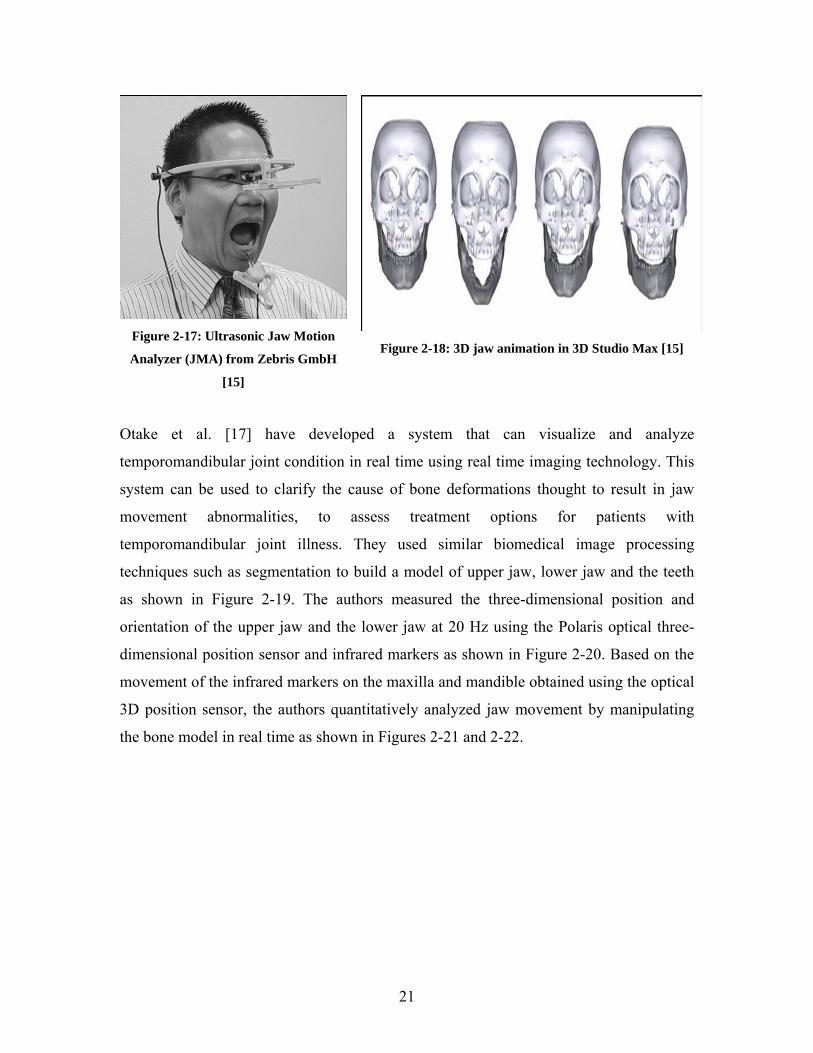
In a research project [15], they introduce automatic patient-specific three-dimensional
jaw modeling from CT data and three-dimensional mastication motion simulation using
jaw tracking data from the JMA system (Zebris) which is an ultrasonic motion capture
device (Figure 2-17) that is comprised of an ultrasound emitter array that is bonded to the
labial surfaces of the mandibular teeth using a jig customized and located on a head
frame secured to the patient’s head. The user can specify the spatial coordinates of the
two condylar points and an infraorbital point to define a plane. Movements of at least
three points relative to this plane during mandibular motions was recorded and exported
to text files as shown in Figure 2-18.
Figure 2-15: The new facebow attached to a
Human Subject [16]
Figure 2-16: Snapshots of the display system [16]
21
Figure 2-17: Ultrasonic Jaw Motion
Analyzer (JMA) from Zebris GmbH
[15]
Figure 2-18: 3D jaw animation in 3D Studio Max [15]
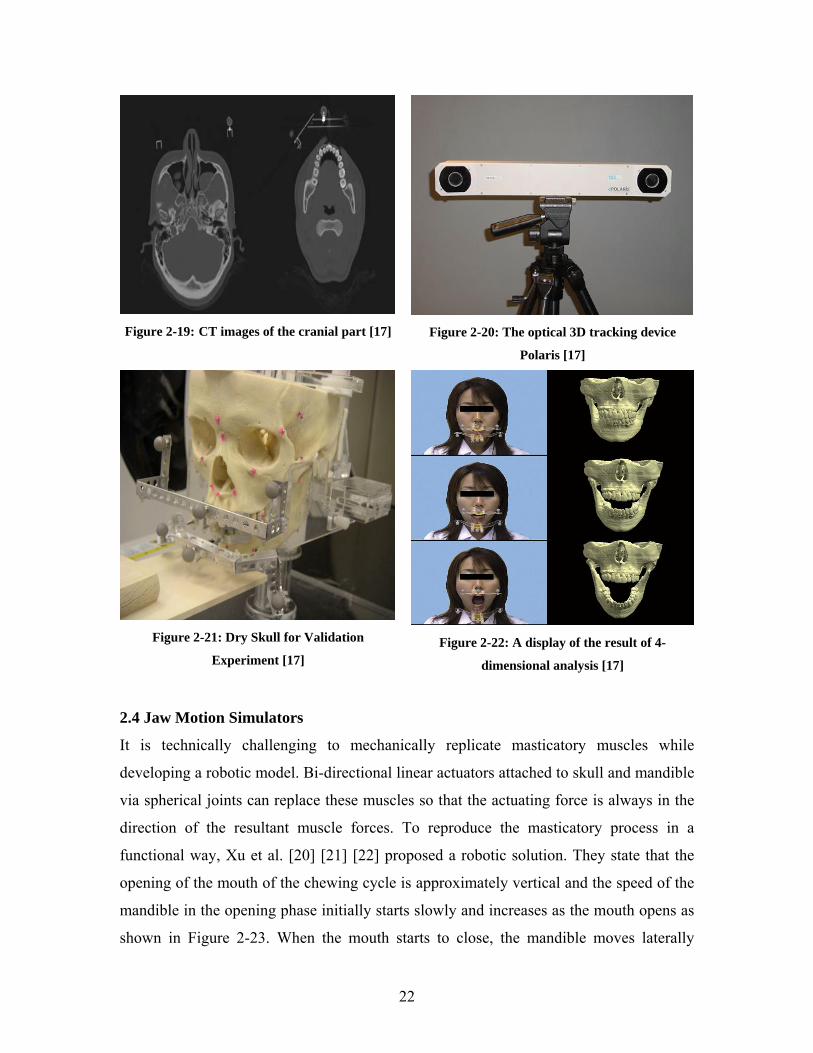
Otake et al. [17] have developed a system that can visualize and analyze
temporomandibular joint condition in real time using real time imaging technology. This
system can be used to clarify the cause of bone deformations thought to result in jaw
movement abnormalities, to assess treatment options for patients with
temporomandibular joint illness. They used similar biomedical image processing
techniques such as segmentation to build a model of upper jaw, lower jaw and the teeth
as shown in Figure 2-19. The authors measured the three-dimensional position and
orientation of the upper jaw and the lower jaw at 20 Hz using the Polaris optical three-
dimensional position sensor and infrared markers as shown in Figure 2-20. Based on the
movement of the infrared markers on the maxilla and mandible obtained using the optical
3D position sensor, the authors quantitatively analyzed jaw movement by manipulating
the bone model in real time as shown in Figures 2-21 and 2-22.
22
Figure 2-19: CT images of the cranial part [17]
Figure 2-20: The optical 3D tracking device
Polaris [17]
Figure 2-21: Dry Skull for Validation
Experiment [17] Figure 2-22: A display of the result of 4-
dimensional analysis [17]
2.4 Jaw Motion Simulators
It is technically challenging to mechanically replicate masticatory muscles while
developing a robotic model. Bi-directional linear actuators attached to skull and mandible
via spherical joints can replace these muscles so that the actuating force is always in the
direction of the resultant muscle forces. To reproduce the masticatory process in a
functional way, Xu et al. [20] [21] [22] proposed a robotic solution. They state that the
opening of the mouth of the chewing cycle is approximately vertical and the speed of the
mandible in the opening phase initially starts slowly and increases as the mouth opens as
shown in Figure 2-23. When the mouth starts to close, the mandible moves laterally

23
outward and initially closes quickly coming back towards the teeth and then slows for
occlusion. Since the trajectory of chewing depends on size and shape of food particles
and chewing action a considerable amount of work has been done to determine chewing
movements in food sciences.
Figure 2-23: Jaw Opening and Closing Cycle [20] [21]
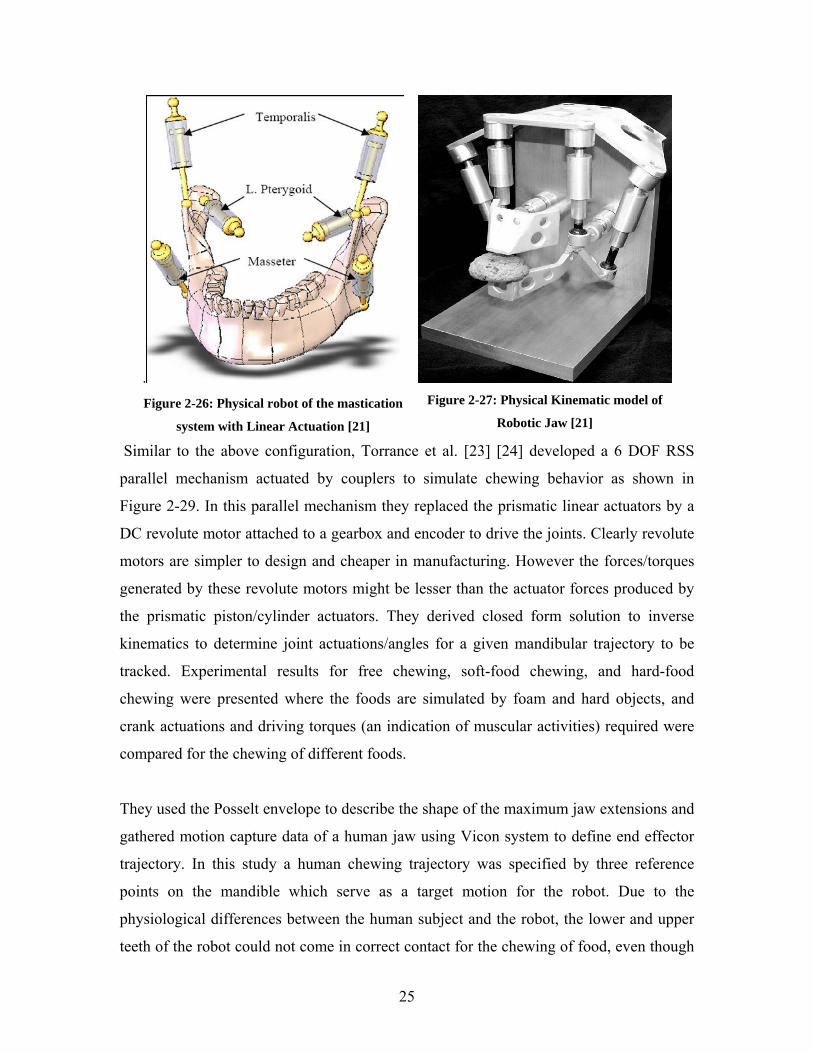
Following a literature survey of the biomechanical findings about jaw structure and
masticatory muscles, each of the major muscles (temporalis, masseter, pterygoid and
digastrics) responsible for the masticatory movements can be represented by a linear
actuator in a mechanical setting as shown in Figure 2-26 and Figure 2-28. Figure 2-27
shows the robotic jaw device built by Xu et al. [21] consisting of fixed plate, moving
plate and six actuators connected by spherical joints representing masticatory muscles.
This model doesn’t include digastrics muscles and other jaw opening muscles because of
the bi-directionality principle of the actuators. The jaw included in the model was
obtained from a human cadaver by computer tomography. The actuator properties such as
stroke, velocity, and acceleration were analyzed in Cosmos using the attachment points of
these muscles and inverse kinematics of human chewing trajectory. Before building the
mechatronic device for reproducing the chewing behavior, it is essential to model,
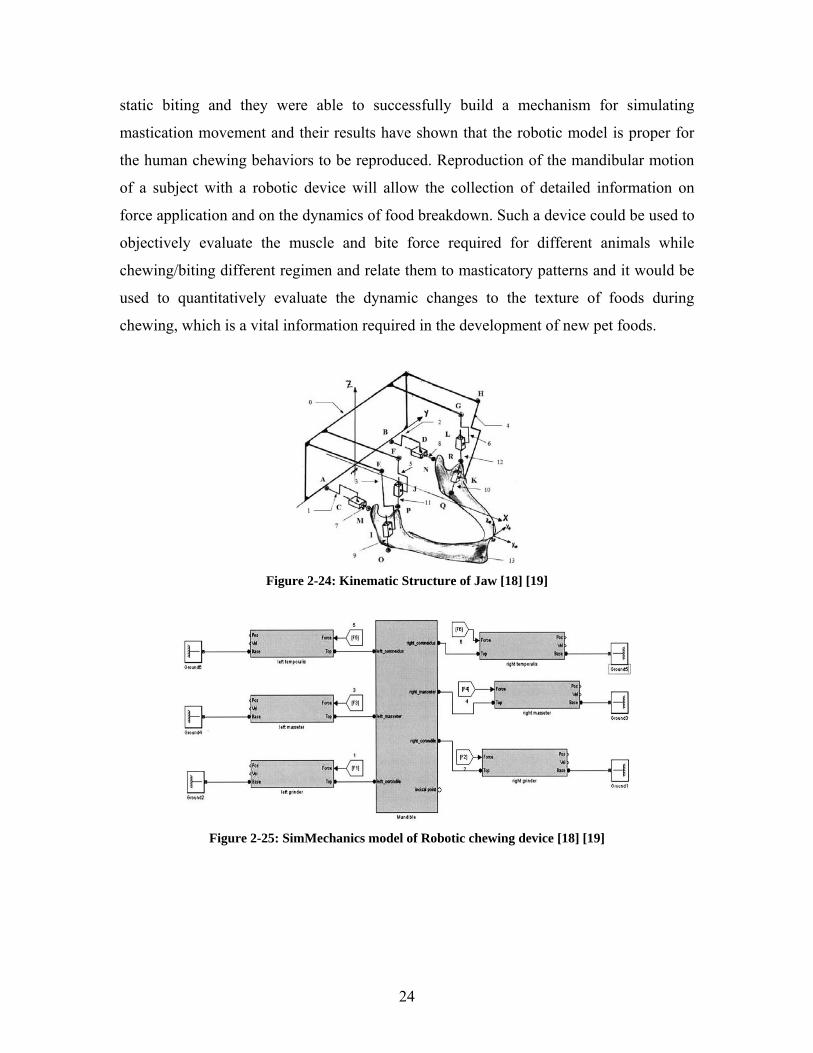
simulate and control the 6 DOF jaw mechanism. Daumas et al. [18] [19] modeled a
6DOF spatial jaw mechanism consisting of 14 links, six actuators and 12 spherical joints
and 6 prismatic joints and simulated motion control using the Matlab SimMechanics
toolbox. The SimMechanics block diagram is shown in Figure 2-25 and the kinematic
sketch of their jaw mechanism in Figure 2-24. The actuator forces were calculated for
24
static biting and they were able to successfully build a mechanism for simulating
mastication movement and their results have shown that the robotic model is proper for
the human chewing behaviors to be reproduced. Reproduction of the mandibular motion
of a subject with a robotic device will allow the collection of detailed information on
force application and on the dynamics of food breakdown. Such a device could be used to
objectively evaluate the muscle and bite force required for different animals while
chewing/biting different regimen and relate them to masticatory patterns and it would be
used to quantitatively evaluate the dynamic changes to the texture of foods during
chewing, which is a vital information required in the development of new pet foods.
Figure 2-24: Kinematic Structure of Jaw [18] [19]
Figure 2-25: SimMechanics model of Robotic chewing device [18] [19]
25
.Figure 2-26: Physical robot of the mastication
system with Linear Actuation [21]
Figure 2-27: Physical Kinematic model of
Robotic Jaw [21]
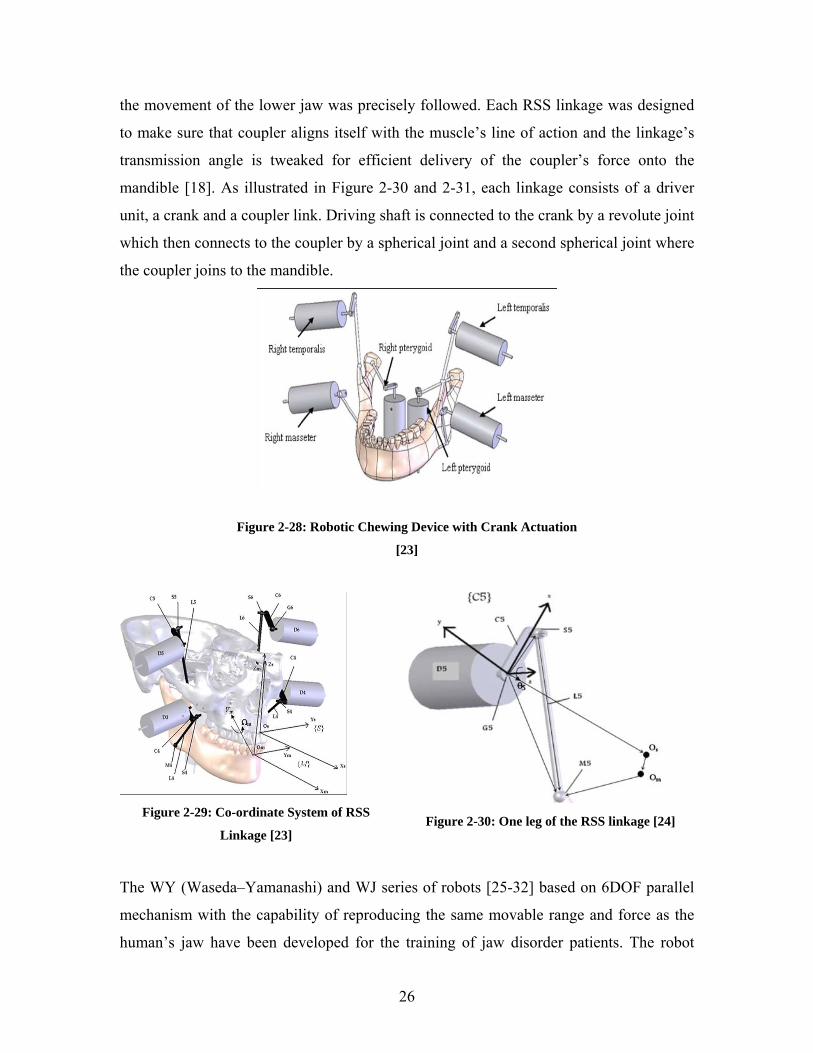
Similar to the above configuration, Torrance et al. [23] [24] developed a 6 DOF RSS
parallel mechanism actuated by couplers to simulate chewing behavior as shown in
Figure 2-29. In this parallel mechanism they replaced the prismatic linear actuators by a
DC revolute motor attached to a gearbox and encoder to drive the joints. Clearly revolute
motors are simpler to design and cheaper in manufacturing. However the forces/torques
generated by these revolute motors might be lesser than the actuator forces produced by
the prismatic piston/cylinder actuators. They derived closed form solution to inverse
kinematics to determine joint actuations/angles for a given mandibular trajectory to be
tracked. Experimental results for free chewing, soft-food chewing, and hard-food
chewing were presented where the foods are simulated by foam and hard objects, and
crank actuations and driving torques (an indication of muscular activities) required were
compared for the chewing of different foods.
They used the Posselt envelope to describe the shape of the maximum jaw extensions and
gathered motion capture data of a human jaw using Vicon system to define end effector
trajectory. In this study a human chewing trajectory was specified by three reference
points on the mandible which serve as a target motion for the robot. Due to the
physiological differences between the human subject and the robot, the lower and upper
teeth of the robot could not come in correct contact for the chewing of food, even though
26
the movement of the lower jaw was precisely followed. Each RSS linkage was designed
to make sure that coupler aligns itself with the muscle’s line of action and the linkage’s
transmission angle is tweaked for efficient delivery of the coupler’s force onto the
mandible [18]. As illustrated in Figure 2-30 and 2-31, each linkage consists of a driver
unit, a crank and a coupler link. Driving shaft is connected to the crank by a revolute joint
which then connects to the coupler by a spherical joint and a second spherical joint where
the coupler joins to the mandible.
Figure 2-28: Robotic Chewing Device with Crank Actuation
[23]
Figure 2-29: Co-ordinate System of RSS
Linkage [23]
Figure 2-30: One leg of the RSS linkage [24]
The WY (Waseda–Yamanashi) and WJ series of robots [25-32] based on 6DOF parallel
mechanism with the capability of reproducing the same movable range and force as the
human’s jaw have been developed for the training of jaw disorder patients. The robot
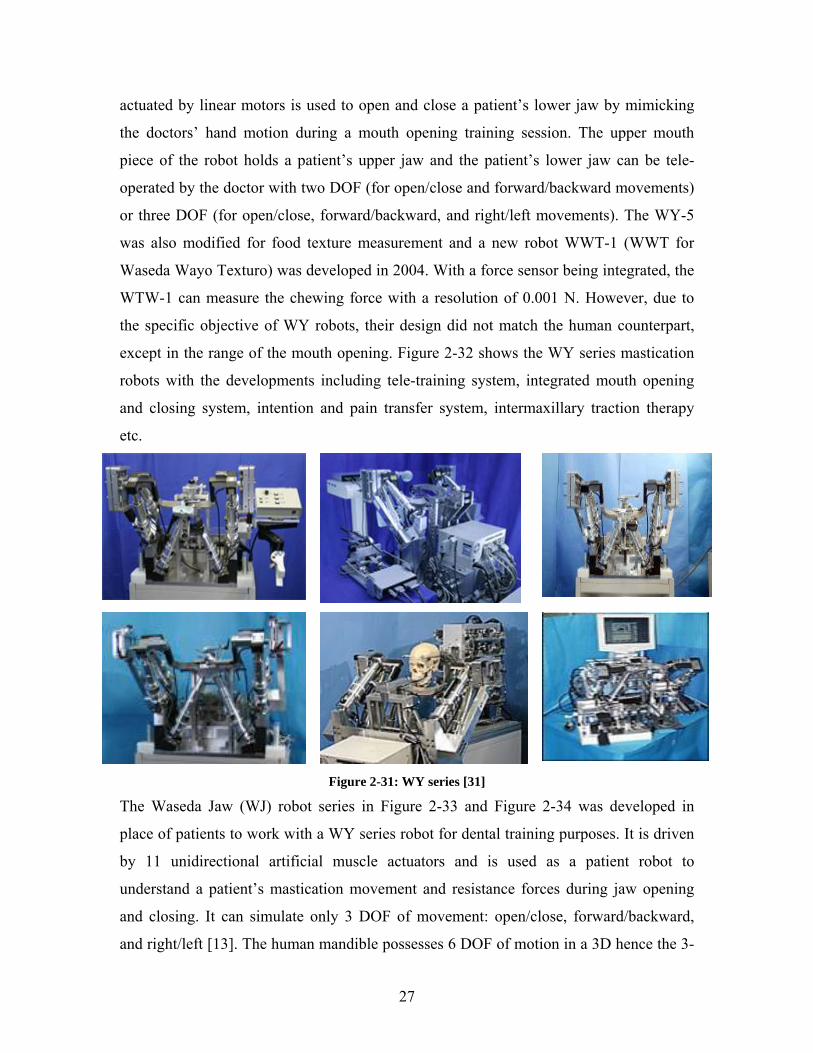
27
actuated by linear motors is used to open and close a patient’s lower jaw by mimicking
the doctors’ hand motion during a mouth opening training session. The upper mouth
piece of the robot holds a patient’s upper jaw and the patient’s lower jaw can be tele-
operated by the doctor with two DOF (for open/close and forward/backward movements)
or three DOF (for open/close, forward/backward, and right/left movements). The WY-5
was also modified for food texture measurement and a new robot WWT-1 (WWT for
Waseda Wayo Texturo) was developed in 2004. With a force sensor being integrated, the
WTW-1 can measure the chewing force with a resolution of 0.001 N. However, due to
the specific objective of WY robots, their design did not match the human counterpart,
except in the range of the mouth opening. Figure 2-32 shows the WY series mastication
robots with the developments including tele-training system, integrated mouth opening
and closing system, intention and pain transfer system, intermaxillary traction therapy
etc.
Figure 2-31: WY series [31]
The Waseda Jaw (WJ) robot series in Figure 2-33 and Figure 2-34 was developed in
place of patients to work with a WY series robot for dental training purposes. It is driven
by 11 unidirectional artificial muscle actuators and is used as a patient robot to
understand a patient’s mastication movement and resistance forces during jaw opening
and closing. It can simulate only 3 DOF of movement: open/close, forward/backward,
and right/left [13]. The human mandible possesses 6 DOF of motion in a 3D hence the 3-
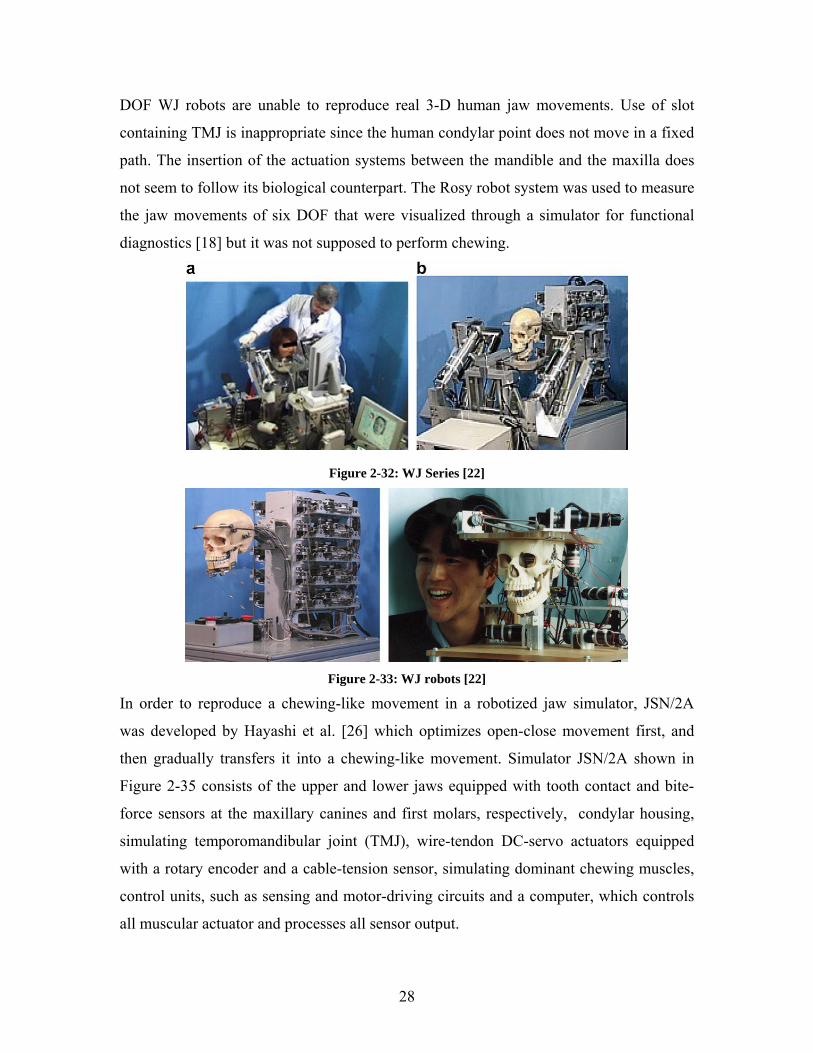
28
DOF WJ robots are unable to reproduce real 3-D human jaw movements. Use of slot
containing TMJ is inappropriate since the human condylar point does not move in a fixed
path. The insertion of the actuation systems between the mandible and the maxilla does
not seem to follow its biological counterpart. The Rosy robot system was used to measure
the jaw movements of six DOF that were visualized through a simulator for functional
diagnostics [18] but it was not supposed to perform chewing.
Figure 2-32: WJ Series [22]
Figure 2-33: WJ robots [22]
In order to reproduce a chewing-like movement in a robotized jaw simulator, JSN/2A
was developed by Hayashi et al. [26] which optimizes open-close movement first, and
then gradually transfers it into a chewing-like movement. Simulator JSN/2A shown in
Figure 2-35 consists of the upper and lower jaws equipped with tooth contact and bite-
force sensors at the maxillary canines and first molars, respectively, condylar housing,
simulating temporomandibular joint (TMJ), wire-tendon DC-servo actuators equipped
with a rotary encoder and a cable-tension sensor, simulating dominant chewing muscles,
control units, such as sensing and motor-driving circuits and a computer, which controls
all muscular actuator and processes all sensor output.
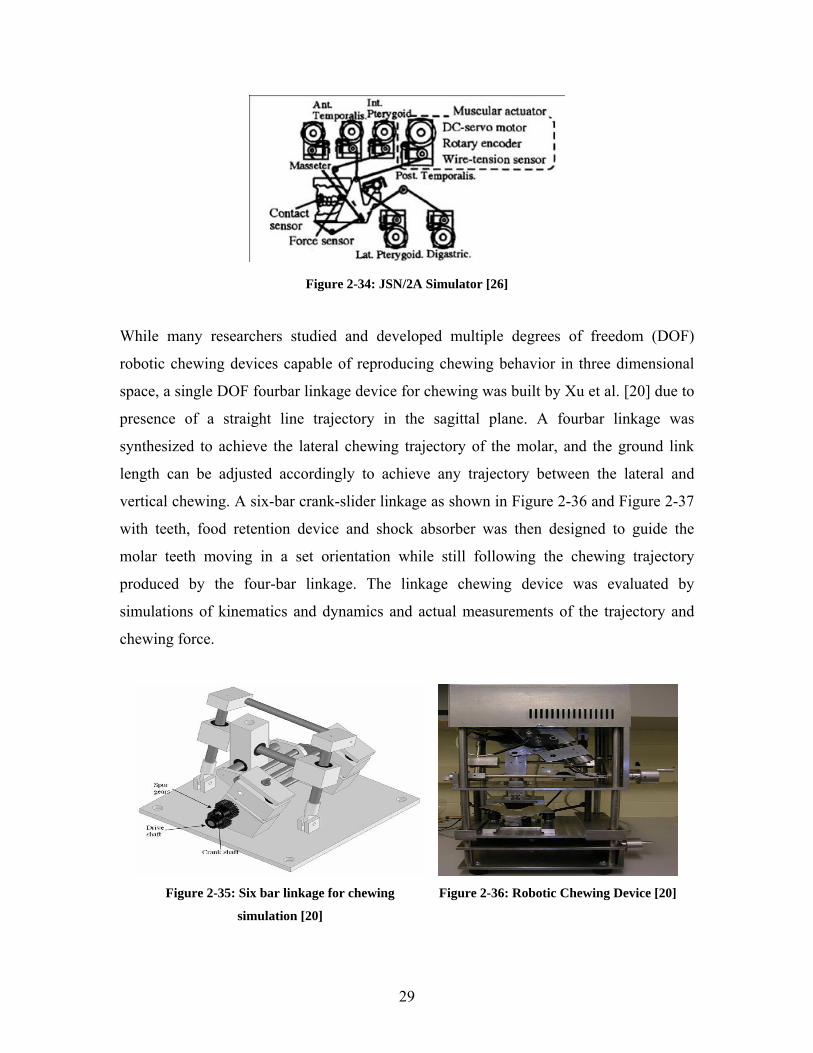
29
Figure 2-34: JSN/2A Simulator [26]
While many researchers studied and developed multiple degrees of freedom (DOF)
robotic chewing devices capable of reproducing chewing behavior in three dimensional
space, a single DOF fourbar linkage device for chewing was built by Xu et al. [20] due to
presence of a straight line trajectory in the sagittal plane. A fourbar linkage was
synthesized to achieve the lateral chewing trajectory of the molar, and the ground link
length can be adjusted accordingly to achieve any trajectory between the lateral and
vertical chewing. A six-bar crank-slider linkage as shown in Figure 2-36 and Figure 2-37
with teeth, food retention device and shock absorber was then designed to guide the
molar teeth moving in a set orientation while still following the chewing trajectory
produced by the four-bar linkage. The linkage chewing device was evaluated by
simulations of kinematics and dynamics and actual measurements of the trajectory and
chewing force.
Figure 2-35: Six bar linkage for chewing
simulation [20]
Figure 2-36: Robotic Chewing Device [20]

30
2.5 Parallel Manipulators
Since the most common and general form of 6DOF simulation platform is a “Stewart
platform”, we will be using it to simulate jaw motion and investigate masticatory
efficiency and mechanical breakdown of food. A Stewart platform configuration was
chosen as an ideal structure for simulating vertebrate mastication as it is easily
assembled, has high rigidity, high load carrying capacity and accurate positioning
capability. We can reverse engineer skull and mandible of a vertebrate and integrate with
the CAD assembly of Stewart platform to develop a robotic vertebrate mastication
simulator. From the literature of parallel manipulators, the load on the actuator of a
Stewart platform needs lesser force as compared to Xu platform due to its geometric
nature of actuators and in a Stewart platform, the actuators are all on the outside of the
skull and therefore there is almost no size limitation on the actuators when compared to
Xu configuration [32]. Typically a parallel manipulator consists of a fixed "base"
platform, connected to an end effector platform by means of a number of "legs". These
legs often consist of an actuated prismatic or revolute joint, connected to the platforms
through passive (i.e. not actuated) spherical and/or universal joints. Hence, the links feel
only traction or compression, not bending, which increases their position accuracy and
allows a lighter construction. The actuators for the prismatic joints can be placed in the
motionless base platform, so that their mass does not have to be moved, which again
makes the construction lighter. Parallel manipulators have high structural stiffness, since
the end effector is supported in several places at the same time. All these features result
in manipulators with a high bandwidth motion capability. Their major drawback is their
limited workspace and singularity, because the legs can collide and, in addition, each leg
has five passive joints that each has their own mechanical limits. Unlike the simulators
shown above, since this serves the purpose of developing a generic vertebrate jaw motion
simulator including animals and humans, we will be looking to build a 6DOF Stewart
platform type parallel manipulator for reproducing the masticatory motion and evaluating
food breakdowns.
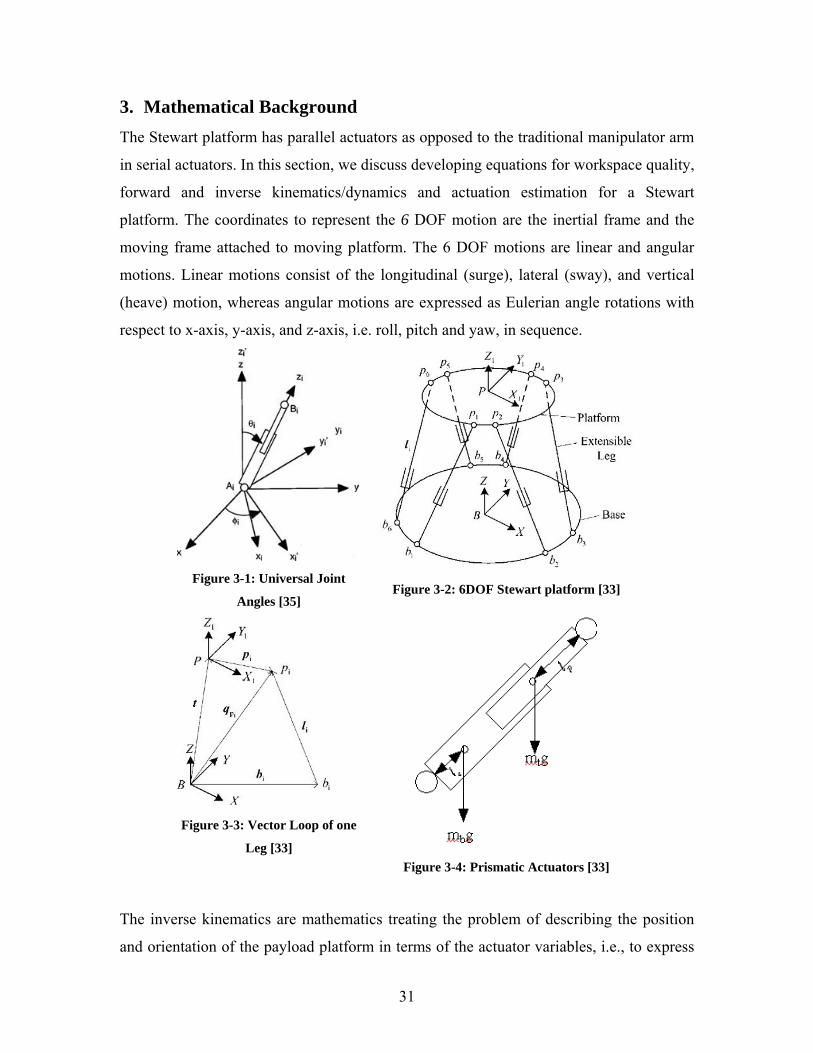
31
3. Mathematical Background The Stewart platform has parallel actuators as opposed to the traditional manipulator arm
in serial actuators. In this section, we discuss developing equations for workspace quality,
forward and inverse kinematics/dynamics and actuation estimation for a Stewart
platform. The coordinates to represent the 6 DOF motion are the inertial frame and the
moving frame attached to moving platform. The 6 DOF motions are linear and angular
motions. Linear motions consist of the longitudinal (surge), lateral (sway), and vertical
(heave) motion, whereas angular motions are expressed as Eulerian angle rotations with
respect to x-axis, y-axis, and z-axis, i.e. roll, pitch and yaw, in sequence.
Figure 3-1: Universal Joint
Angles [35]
Figure 3-2: 6DOF Stewart platform [33]
Figure 3-3: Vector Loop of one
Leg [33] Figure 3-4: Prismatic Actuators [33]
The inverse kinematics are mathematics treating the problem of describing the position
and orientation of the payload platform in terms of the actuator variables, i.e., to express

32
(x, y, z, xφ , yφ , zφ ) by the actuator lengths (di). As the sketch map shown in Figure 3-2,
we attach two coordinate frames {P) and {B) to the payload platform and the base
platform, respectively. Suppose that vector Pi = [ pix ; piy ; piz] describes the position of
the reference point Pi shown in Fig, l(a) with respect to frame (P}. Then Pi can be
expressed as: [37]
where
( )( )
1
cossin
0
; 1,3,53 2
; 2, 4,6
p i ix
i p i iy
iz
pi
i i p
r PP r P
P
i fori
fori
λλ
θπλ
λ λ θ−
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
= − =
= + =
(3.1)
where pr is the radius of the upper plate and in this case 2pπθ =
On the other hand, the vector Bi = [bix ; biy ; biz] in Fig describes the position of the
attachment point Bi with respect to frame {B} where Bi can be expressed as:
( )( )
1
cossin
0
3 2
b i ix
i b i iy
iz
bi
i i b
r BB r B
B
i θπ
θ−
Λ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= Λ =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
Λ = −
Λ = Λ +
for i=1,3,5 (3.2)
for i=2,4,6
again br is radius of the lower plate and in this case 6Bπθ =
Let the rotation matrix be defined by the roll, pitch and yaw angles, namely a rotation of
xφ about the fixed x-axis followed by a rotation of yφ about the fixed y axis and a rotation
of zφ about the fixed z-axis. Thus the rotation matrix can be written as
z y z y x z x z y x z x
BP z y z y x z x z y x z x
y y x y x
c c c s s s c c s c s sR s c s s s c c s s c c s
s c s c c
φ φ φ φ φ φ φ φ φ φ φ φφ φ φ φ φ φ φ φ φ φ φ φφ φ φ φ φ
⎡ ⎤− +⎢ ⎥= + −⎢ ⎥⎢ ⎥−⎣ ⎦
(3.3)

33
The angular velocity of the moving platform is given by
T
p x y zω φ φ φ⎡ ⎤= ⎣ ⎦ (3.4)
and the angular acceleration is
T
p x y zω φ φ φ⎡ ⎤= ⎣ ⎦ (3.5)
In the derivation below [33] we can see that the position, velocity and acceleration of the
actuators are derived in terms of the position, velocity and acceleration of the moving
platform. Readers are requested to refer to [33] for detailed derivation.
3.1 Kinematic Analysis:
Considering one of the six legs of the parallel manipulator as shown in Figure 3-3 for the
purpose of analysis, based on the vector loop equation, the leg vector l with respect to the
inertial reference frame can be denoted as
l t Rp b= + − (3.6)
For the sake of convenience, the leg index i for each of the six legs is omitted in the
derivation below to avoid any confusion for the reader.
The length of the leg can be computed by computing the Euclidean norm as
l l= (3.7)
Equations (3.6) and (3.7) represent the closed form solution to the inverse kinematic
problem in the sense that the actuator lengths can be determined using equation (3.7) for
a given Cartesian co-ordinate vector representing the position and the orientation of the
moving platform. Then the unit vector along the leg can be denoted as
lnl
= (3.8)
Since each limb is connected to the fixed base by a universal joint as shown in Figure 3-
1, its orientation with respect to the fixed base can be conveniently described by two
Euler angles [35]. As shown in Figure 3-1, the local co-ordinate frame of the limb can be
thought of as a rotation of iφ about the iz axis followed by a rotation of iθ about the
rotated iy axis. In this way, the rotation matrix of the ith limb may be written as

34
0
i i i iBi i i i i i
i i
c c s c sR s c c s s
s c
φ θ φ φ θφ θ φ φ θθ θ
−⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥−⎣ ⎦
(3.9)
The unit vector in expressed in the ith limb frame is given by
001
iin
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
(3.10)
upon substitution of iin into B i
i i in R n= we get
i i
i i i
i
c sn s s
c
φ θφ θθ
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
(3.11)
Solving Eq (3.11) for iθ and iφ we obtain
( ) ( )2 2 0
i iz
i ix iy
iyi
i
ixi
i
c n
s n n
ns
sncs
θ
θ θ π
φθ
φθ
=
= + ≤ ≤
=
=
(3.12)
where ixn , iyn and izn are the x, y, z components of in . The above equations together
determine the two universal joint angles and the direction of the ith limb in terms of the
moving platform location.
3.2 Velocity and Acceleration Analysis:
The Stewart platform consists of the moving platform and the base platform which are
connected together by six linear prismatic actuators (piston-cylinder arrangement). Each
of these six legs has a spherical joint at the upper end and a universal joint at the lower
end and a prismatic joint between the piston and the cylinder. Two frames of reference
are fixed one at the base platform as {B, X, Y, Z} and other at the moving platform as {P,

35
X1, Y1, Z1}. A generalized co-ordinate vector consisting of the position and the
orientation of the moving platform is defined as [33]
T
x y zq x y z φ φ φ⎡ ⎤= ⎣ ⎦ (3.13)
The above generalized co-ordinate vector can be split into two terms as the translation
vector [ ]Tt x y z= and a rotational vector T
x y zφ φ φ⎡ ⎤⎣ ⎦ . Now the generalized
velocity vector can be calculated as
TT Tq t ω⎡ ⎤= ⎣ ⎦ (3.14)
where ω denotes the angular velocity vector of the upper moving platform w.r.t. to the
inertial frame of reference.
From equation (3.4), the counterpart of pω w.r.t. to the inertial frame of reference is
bω and can be defined as
Tb pR Rω ω= (3.15)
where bω denotes the skew symmetric matrix associated with the vector
[ ]1 2 3T
b bω ω ω ω= and can be fined as
3 2
3 1
2 1
00
0b
ω ωω ω ω
ω ω
−⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥−⎣ ⎦
(3.16)
The position of the upper gimbal point with respect to the inertial reference frame can be
described as:
pq t Rp= + (3.17)
then the velocity of the corresponding gimbal point can be derived as
3 3
3 3
p
T T
T T
T T
q t Rp
t Rp Rt
I Rp R
I Rp R q
ω
ω
ω×
×
= + ×
= +
⎡ ⎤⎡ ⎤= ⎢ ⎥⎣ ⎦
⎣ ⎦⎡ ⎤= ⎣ ⎦
(3.18)

36
where Rp denotes the counterpart of p with respect to the inertial frame of reference.
Then by projection of this velocity vector along the axis of each leg, the velocity of the
length of the leg can be computed as
( )( )
Tp
T T Tb
TTb
TT
l n q
n n p q
n p n q
n Rp n q
=
⎡ ⎤= ⎣ ⎦⎡ ⎤= ⎢ ⎥⎣ ⎦⎡ ⎤= ×⎣ ⎦
(3.19)
According to Lagrangian formulation, we need to compute the kinetic energy and the
generalized forces due to the gravitational forces of the leg. In order to compute kinetic
energy and generalized forces, it is essential to compute the velocities of the center of
gravity of piston part and cylinder part of the actuator and also the angular velocity of the
actuator. It can be derived as follows:
The angular velocity of the actuator can be derived from the above equations as
pa
p
n ql
nql
ω×
=
= (3.20)
Similarly the linear velocities of the piston part and cylinder part of the actuator can be
derived as
( )
2
p p a p
pp
v q w l n
l nI q
l
= + × −
⎛ ⎞= +⎜ ⎟⎜ ⎟⎝ ⎠
(3.21)
T
cc a c p
l n nv w l n ql
⎛ ⎞= × = ⎜ ⎟
⎝ ⎠ (3.22)
where pl denotes the length between the upper gimbal point and the center of gravity of
the piston part of actuator and cl denotes the length between the lower gimbal point and
the center of gravity of cylinder part of the actuator as shown in Figure 3-4.

37
The acceleration of the upper gimbal point can be obtained by differentiating equation
(3.18) as
23 3
T Tpq I Rp R q Rpω×⎡ ⎤= +⎣ ⎦ (3.23)
3.3 Jacobian Analysis
The Jacobian matrix, in the field of robotics, is used to describes the relationship between
joint and end-effector velocities. At the inverse kinematics level the jacobian matrix is
defined as
pl J q= (3.24)
where l is the velocity vector of prismatic joint lengths and q is the end effector velocity
vector. pJ is called as parallel manipulator jacobian matrix. Similarly at statics level, by
the principle of virtual work the Jacobian also relates joint torques to end- effector
wrench as follow:
TpW J F= (3.25)
3.3.1 Jacobian Matrix Based On Vector Loop Closure Equation
In this section Jacobian matrix will be derived based on the vector loop closure
technique.
From the fig and equation (3.6) we can write the vector loop equation as
Bi i P ib l t R p+ = + (3.26)
Differentiating equation (3.26) w.r.t. time gives

38
( ) 1
3 2
3 1
2 1
00
0
00
0
1 0 0 00
Bi P i
B B BP P P i
Bi
Bi
Bix
iy
iz
Bz y ix
z x iy
y x iz
iz iy
l t R p
t R R R p
t p
t p
x py pz p
x py pz p
p p
ω
ω
ω ωω ωω ω
φ φφ φφ φ
−
= +
= +
= + ×
= +
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥= + − −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
⎡ ⎤−⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥= + − −⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
−= 1 0 0
0 0 1 0iz ix
xiy ix
y
z
i l p
xyz
p pp p
l J x
φφφ
⎡ ⎤⎢ ⎥⎢ ⎥⎡ ⎤⎢ ⎥⎢ ⎥− ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥−⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
=
(3.27)
where lJ is called as the link jacobian matrix. The velocity vector of the joint lengths
should be w.r.t. the limb frame of reference and the Jacobian matrix will change
accordingly as, from equation (3.9) can be written as
( ) 1
1 1 0 0 00 1 0 0
0 0 0 1 0
L Bl l l
i i i i iz iy
i i i i i iz ix
i i iy ix
J R J
c c s c s p ps c c s s p p
s c p p
φ θ φ φ θφ θ φ φ θθ θ
−
−
=
⎡ ⎤− −⎡ ⎤⎢ ⎥⎢ ⎥= −⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥− −⎣ ⎦ ⎣ ⎦
(3.28)
Now since the prismatic joint is along the iz axis for each limb, we need to extract the
third row from above matrix multiplication and assembling the matrix for each of the six
actuators gives the parallel manipulator Jacobian Matrix as

39
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3
z y z x y x
z y z x y x
z y z x yp
c s s s c p s s p c p c s p c p c s p s sc s s s c p s s p c p c s p c p c s p s sc s s s c p s s p c p c s p c p c s p
J
φ θ φ θ θ φ θ θ φ θ θ φ θ φ θφ θ φ θ θ φ θ θ φ θ θ φ θ φ θφ θ φ θ θ φ θ θ φ θ θ φ θ
− + − − +− + − − +− + − − +
= 3 3
4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4
5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5
6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6
x
z y z x y x
z y z x y x
z y z x y
s sc s s s c p s s p c p c s p c p c s p s sc s s s c p s s p c p c s p c p c s p s sc s s s c p s s p c p c s p c p c s
φ θφ θ φ θ θ φ θ θ φ θ θ φ θ φ θφ θ φ θ θ φ θ θ φ θ θ φ θ φ θφ θ φ θ θ φ θ θ φ θ θ φ θ
− + − − +− + − − +− + − −
( ) ( ) ( ) ( ) ( ) ( )
6 6 6 6
1 2 3 4 5 6
1 2 3 4 5 61 2 3 4 5 6
x
Tp T T T T T T
p s s
n n n n n nJ
RpR n RpR n RpR n RpR n RpR n RpR n
φ θ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
+⎢ ⎥⎣ ⎦⎡ ⎤
= ⎢ ⎥⎢ ⎥⎣ ⎦
(3.29)
3.3.2 Screw Theory Based Jacobian Analysis
In the following section, we will focus on screw theory based Jacobian analysis of
parallel manipulator [36]. The kinematics of a mechanical system can be expressed in
terms of screw coordinates. Unlike conventional but straightforward method which
usually involves derivatives during derivation in modeling, one of the major advantages
of screw-theoretic method is it provide us a low-resolution computational model based on
the geometric insight of the system.
Figure 3-5: Screw Co-ordinate Theory
Figure 3-5 above shows a spatial 6-dof parallel manipulator (Gough-Stewart platform)
with 6 identical UPS limbs. The upper plate, which is considered as the moving or end-
effector is connected by six identical limbs to the lower fixed base by spherical joints

40
jb and jp , j=1, 2, 6. Several close loop kinematic chains are formed by the six limbs.
Let’s define an instantaneous reference frame ( )1 1 1, , ,P X Y Z attached to the moving
platform and an inertial frame of reference ( ), , ,B X Y Z . Then we express all the joint
screws with respect to this instantaneous reference frame. Then, the Jacobian matrix of
the Gough-Stewart platform can be derived by applying the concept of reciprocal screws
[36]. Figure 3-5 shows the equivalent kinematic chain of an UPS limb, we can consider
that the lower universal joint can be replaced by two unit screws 1S and 2S , the prismatic
joint replaced by a unit screw 3S and the upper spherical joint be replaced by three unit
screws 4S , 5S and 6S . Among these six joints, only the prismatic joint is active and the
rest of the joints are passive. Let ,ˆi jn be unit vector along the ith joint axis of the jth limb
in P frame. Then the six unit joint screws can be written as
( ),
,,
,,
,,
,
ˆˆ ; 1, 2
ˆ
0ˆ ; 3ˆ
ˆˆ ; 4,5,6ˆ
i ji j
j j i j
i ji j
i ji j
j i j
nS i
p l n
S in
nS i
p n
⎡ ⎤= =⎢ ⎥
− ×⎢ ⎥⎣ ⎦⎡ ⎤
= =⎢ ⎥⎣ ⎦⎡ ⎤
= =⎢ ⎥×⎣ ⎦
(3.30)
where jl is the vector corresponding to the thj limb and jp is the position of the thj ball
joint location w.r.t. to moving platform reference frame.
Now, we can get end-effector twist with respect to this instantaneous reference frame as:
1,
2,
1, 2, 3, 4, 5, 6,4,
5,
6,
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ; 1, 2,...6
j
j
jt j j j j j j
j
j
j
lVS S S S S S S j
θθ
θωθθ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤= = =⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎢ ⎥⎣ ⎦⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(3.31)

41
Since the axes of all the unactuated joints in each limb intersect the line passing through
points jb and jp , which define the vector jl we can define a unique screw that is
reciprocal to all the unactuated joint as :
3,,3,
3,
ˆˆˆj
r jj j
nS
p n⎡ ⎤
= ⎢ ⎥×⎣ ⎦ (3.32)
where ,3,ˆ
r jS can be considered as the zero-pitch unit screw coincident with each limb. By
taking orthogonal product of both sides of Eq. (3.31) by ,3,ˆ
r jS we get
,3,ˆ ˆ
r j t jS S l= (3.33)
Writing the above equation six times for six limbs we get the Jacobian Matrix as
( )( )( )( )( )( )
3,1 1 3,1
3,2 2 3,2
3,3 3 3,3
3,4 4 3,4
3,5 5 3,5
3,6 6 3,6
ˆ ˆ
ˆ ˆ
ˆ ˆ
ˆ ˆ
ˆ ˆ
ˆ ˆ
p
TT
TT
TT
p TT
TT
TT
l J q
n p n
n p n
n p nJ
n p n
n p n
n p n
=
⎡ ⎤×⎢ ⎥⎢ ⎥×⎢ ⎥⎢ ⎥×⎢ ⎥= ⎢ ⎥
×⎢ ⎥⎢ ⎥
×⎢ ⎥⎢ ⎥⎢ ⎥×⎣ ⎦
(3.34)
The Jacobian needs to computed based on inertial frame of reference and defined as

42
( )( )( )( )( )( )
( ) ( )
3,1 1 3,1
3,2 2 3,2
3,3 3 3,3
3,4 4 3,4
3,5 5 3,5
3,6 6 3,6
3,1 3,2 3,3 3,4 3,5 3,6
1 3,1 2 3,2
ˆ ˆ
ˆ ˆ
ˆ ˆ
ˆ ˆ
ˆ ˆ
ˆ ˆ
ˆ ˆ ˆ ˆ ˆ ˆ
ˆ ˆ
TT BP
TT BP
TT BP
p TT BP
TT BP
TT BP
TT Tp B B B
P P P
n R p n
n R p n
n R p nJ
n R p n
n R p n
n R p n
n n n n n nJ
R p n R p n R
⎡ ⎤×⎢ ⎥⎢ ⎥×⎢ ⎥⎢ ⎥
×⎢ ⎥= ⎢ ⎥⎢ ⎥×⎢ ⎥⎢ ⎥×⎢ ⎥⎢ ⎥×⎢ ⎥⎣ ⎦
=× × ( ) ( ) ( ) ( )
( )( ) ( )( ) ( )( ) ( )( ) ( )( )
3 3,3 4 3,4 5 3,5 6 3,6
3,1 3,2 3,3 3,4 3,5
3,1 3,2 3,3 3,4 3,51 2 3 4 5
ˆ ˆ ˆ ˆ
ˆ ˆ ˆ ˆ ˆ
ˆ ˆ ˆ ˆ ˆ
T T T TB B BP P P
TT T T T Tp B B B B B B B B B B
P P P P P P P P P P
p n R p n R p n R p n
n n n n nJ
R p R n R p R n R p R n R p R n R p R n R
⎡ ⎤⎢ ⎥
× × × ×⎢ ⎥⎣ ⎦
= ⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠ (⎡⎢
⎛⎢ ⎜⎢ ⎝⎣ (3.35)
3.4 Jacobian-Based Performance Measures (JBPM)
As noted from Equation(3.35), the Jacobian matrix offers a configuration dependent
linear relationship between the joint and task space velocities. This matrix has played an
important role in developing metrics for evaluating and characterizing the performance of
robotic systems. Such Jacobian-Based Performance Measures (JBPM), including
manipulability, isotropy index, condition number, dexterity and singularity have been
employed in a lot of robotic applications [34]. By quantitatively evaluating the qualitative
characteristics, such measures play a critical role in design, evaluation and optimization
of a robotic system. We mainly utilize the manipulability measures to evaluate the
performances of our systems. Manipulability is defined as the measure of the flexibility
of the manipulator to transmit the end-effector motion in response to a unit norm motion
of the rates of the active joints in the system.
3.4.1 Singular Value Decomposition (SVD) and Manipulability Ellipsoid The Singular Value Decomposition (SVD) of the Jacobian matrix and its geometric
relationship offer further insights in characterizing the “manipulability” of a manipulator.
We here briefly summarize the major mathematical and geometrical aspects that are
relevant to our work.
Consider a Jacobian Matrix pJ which can be transformed in the form of
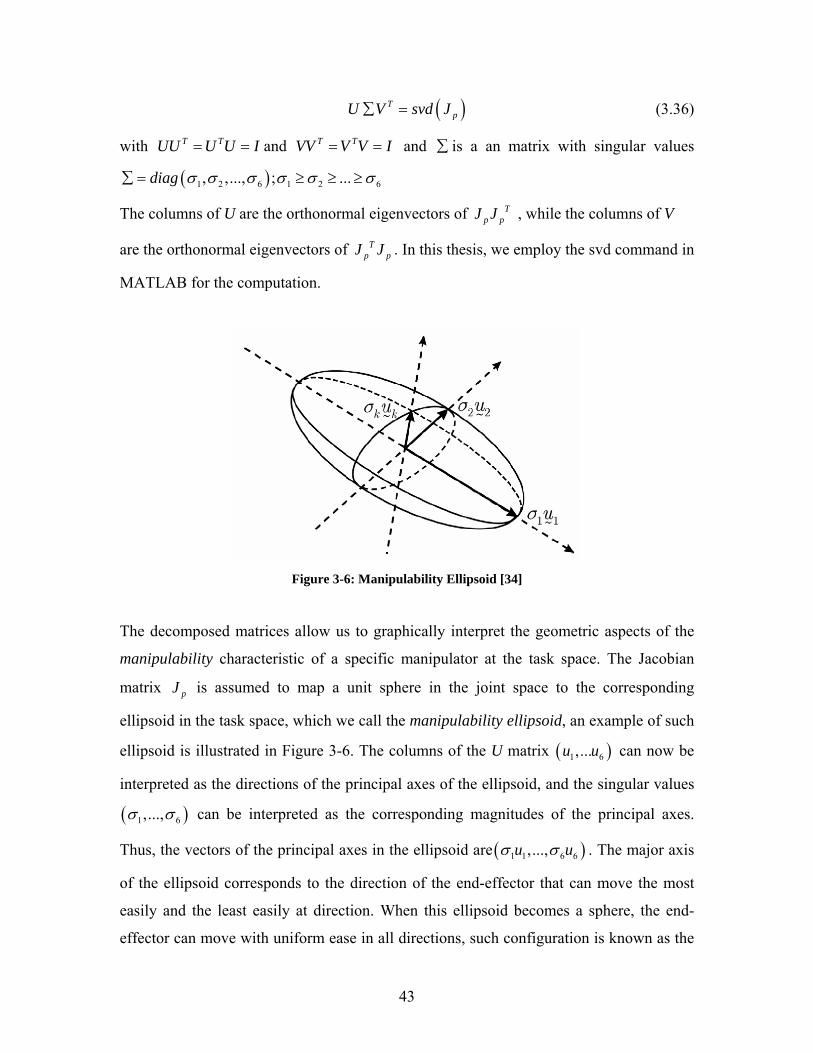
43
( )TpU V svd J∑ = (3.36)
with T TUU U U I= = and T TVV V V I= = and ∑ is a an matrix with singular values
( )1 2 6 1 2 6, ,..., ; ...diag σ σ σ σ σ σ∑ = ≥ ≥ ≥
The columns of U are the orthonormal eigenvectors of Tp pJ J , while the columns of V
are the orthonormal eigenvectors of Tp pJ J . In this thesis, we employ the svd command in
MATLAB for the computation.
Figure 3-6: Manipulability Ellipsoid [34]
The decomposed matrices allow us to graphically interpret the geometric aspects of the
manipulability characteristic of a specific manipulator at the task space. The Jacobian
matrix pJ is assumed to map a unit sphere in the joint space to the corresponding
ellipsoid in the task space, which we call the manipulability ellipsoid, an example of such
ellipsoid is illustrated in Figure 3-6. The columns of the U matrix ( )1 6,...u u can now be
interpreted as the directions of the principal axes of the ellipsoid, and the singular values
( )1 6,...,σ σ can be interpreted as the corresponding magnitudes of the principal axes.
Thus, the vectors of the principal axes in the ellipsoid are ( )1 1 6 6,...,u uσ σ . The major axis
of the ellipsoid corresponds to the direction of the end-effector that can move the most
easily and the least easily at direction. When this ellipsoid becomes a sphere, the end-
effector can move with uniform ease in all directions, such configuration is known as the
44
isotropic configuration. Hence, such SVD and the subsequent geometric interpretation as
the manipulability ellipsoid permit a very useful tool in development of various
performance measures and metrics.
Some of the manipulability measures that are used are Yoshikawa’s measure, condition
number and isotropy index. All these measures are briefly discussed below.
3.4.2 Yoshikawa’s Measure of Manipulability
Yoshikawa’s measure of manipulability is defined as
( )det Ty p pJ JΓ = (3.37)
since U and V are orthonormal
( )det TyΓ = ∑∑ (3.38)
Hence, the measures is nothing more than the product of all the singular values of pJ
However the major criticism to this measure is that it cannot distinguish between a
uniformly spherical ellipsoid which might have the same volume with a long but narrow
ellipsoid.
3.4.3 Condition Number
To evaluate the workspace, the condition number can be utilized to define the
manipulability as
1
6CN
σσ
Γ = (3.39)
where 1σ and 6σ are the minimum and maximum singular values of the Jacobian Matrix.
Geometrically, it is the ratio of the length of the major semiaxis to the length of the minor
semiaxis of the manipulability ellipsoid. Such measure has a lower bound of 1, but it
grows out of bound and tends to infinity when the manipulator is near the singular
configuration.

45
3.4.4 Isotropy Index
Manipulability can also be defined as the reciprocal of the condition number as
6
1Iso
σσ
Γ = (3.40)
Geometrically, it is the ratio of the length of the minor axis to the length of the major axis
of the manipulability ellipsoid. Such a measure is better behaved compared with the
condition number, since the values remain bounded between the values of 0 and 1.
3.5 Dynamic Analysis
For simplicity, firstly the dynamic equations of motion of a 6 DOF Stewart platform is
derived assuming all the six legs to be massless and without inertia and readers can refer
to [37] for detailed description. In general the dynamic equation of motion of the 6 DOF
Stewart platform type parallel manipulator can be written as
( ) ( ) ( ), TpM q q C q q q G q J F+ + = (3.41)
where ( )M q is a 6 6× mass/ inertia matrix; ( ),C q q q is the 6 1× Coriolis/Centripetal
vector; ( )G q and F are the 6 1× vectors containing gravity forces/torques and actuator
(input) forces/torques respectively; eF is the 6 1× external force/torque vector.
The Mass matrix is defined as:
44 45 46
54 55
64 66
0 0 0 0 00 0 0 0 00 0 0 0 00 0 00 0 0 00 0 0 0
mm
mM
m m mm mm m
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(3.42)
where

46
( )
2 2 2 2 244
45 54
46 64
2 255
66
x y z y y z z y
x y y z z
z y
x z y z
z
m I c c I c s I s
m m I I c c s
m m I s
m I s I c
m I
φ φ φ φ φ
φ φ φ
φ
φ φ
= + +
= = −
= =
= +
=
(3.43)
and Coriolis/Centripetal matrix can be written as
0 00 x
CC
⎡ ⎤= ⎢ ⎥⎣ ⎦
(3.44)
where
1 2 1 3 4 2 4
1 4 5 4 5
2 4 4 5 0
y z x y z x y
x x x z x y
x y x y
a a a a a a aC a a a a a
a a a a
φ φ φ φ φ φ φφ φ φ φ φφ φ φ φ
⎡ ⎤− − − − + − +⎢ ⎥= + +⎢ ⎥⎢ ⎥− − −⎣ ⎦
(3.45)
where
( )( )( )
( )( )( )( )
2 21
22
3
4
5
12
y y z x z y z
y z z x y
z z z x y
y z z z z x y
z z x y
a c s c I s I I
a c c s I I
a c s s I I
a c c s c s I I
a c s I I
φ φ φ φ
φ φ φ
φ φ φ
φ φ φ φ φ
φ φ
= + −
= −
= −
= − + −
= −
(3.46)
and the Jacobian Matrix can be defined as
( ) ( ) ( ) ( ) ( ) ( )1 2 3 4 5 6
1 2 3 4 5 61 2 3 4 5 6
TT T T T T T
n n n n n nJ
RpR n RpR n RpR n RpR n RpR n RpR n⎡ ⎤
= ⎢ ⎥⎢ ⎥⎣ ⎦
(3.47)
In the next section dynamic equations of the Stewart platform type parallel manipulator
are derived considering the mass and inertia of all the six actuators [33]. The whole
model is split into two parts, the upper moving platform and the six prismatic actuators
with the base platform. The position and velocity of the upper gimbal point at the top of

47
piston part of the actuator has been chosen as the generalized co-ordinates and velocities
and constraint forces at the upper spherical joint has been derived using Lagrangian
formulation.
Considering pq and pq as the corresponding generalized co-ordinates and speeds
respectively, the Lagrangian equations of the six actuators can be written as
p p
d T T Qdt q q⎛ ⎞ ⎛ ⎞∂ ∂
− =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂⎝ ⎠ ⎝ ⎠ (3.48)
where Q are the generalized forces projected along the variation of the generalized co-
ordinates pq . In the above equation kinetic energy ( ),p pT q q is given by
( )
( )1 2
1 12 212
T Tp t p a t b a
Tp p
T v m v I I
q M M q
ω ω= + +
= + (3.49)
where ( )
2 2
1
2 2
T
p pt
Tt c
l n l nM I m I
l l
n n I IM
l
⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
+=
Solving the above equations, dynamic equations of motion of all the six actuators can be
written as
( ) ( ) ( )21 2 1 2 t c
T T T Ta a m g m gf M M I Rp R q C I Rp R q M M Rp Q Qω⎡ ⎤ ⎡ ⎤= + + + + − +⎣ ⎦ ⎣ ⎦ (3.50)
where
( ) ( ) ( ) ( )2
2 3 3
2
2
t
b
t bT T T T T T T T T T T Tt t t ta p p p p p p
T
tm g t
Tb
m g b
I Im l m lC nq n n n q n n n nq n n q n n n nq n n nq nl l l
l nQ I m gl
l n nQ m gl
+= + + − + −
⎛ ⎞= +⎜ ⎟⎝ ⎠⎛ ⎞
= ⎜ ⎟⎝ ⎠
Now the dynamic equations of motion of the upper moving platform have been derived

48
using the Newton-Euler approach. By applying the equilibrium of forces principle for the
upper moving platform, Newton-Euler equations can be written as
( )6
1p c p
i i
m q f m g=
= − +∑ (3.51)
where cq t Rc= + denotes the position vector of the control point c w.r.t. inertial frame of
reference and 2T Tcq I Rc R q Rcω⎡ ⎤= +⎣ ⎦ denotes the acceleration of the control point.
Dynamic equations of motion of the upper platform is written as
2p pT T T Tp p p p
p p
m I m gM q C q Rc H F
m Rc R m Rc R gω
⎡ ⎤ ⎡ ⎤+ + = − +⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦ (3.52)
where
( ) ( ) ( ) ( ) ( ) ( )[ ]
1 2 3 4 5 6
1 2 3 4 5 6
0 00
T Tp p
p T T T Tp p p
Tpp
p T T T T T T
Tp
m I m Rc RM
m RcR m Rcc R RI R
CRI R
I I I I I IH
RpR RpR RpR RpR RpR RpR
F f f f f f f
ω
⎡ ⎤= ⎢ ⎥+⎢ ⎥⎣ ⎦⎡ ⎤
= ⎢ ⎥⎣ ⎦⎡ ⎤
= ⎢ ⎥⎢ ⎥⎣ ⎦
=
Now by combining the equations (3.51) and (3.52) we can define the dynamic equations
of motion for the whole 6DOF Stewart platform type parallel manipulator as
( ) ( ) ( ), TM q q C q q q G q J F+ + = (3.53)
where
( ) ( )
( ) ( ) ( ) ( )
( ) ( )
6
1 21
6 62 2
1 21 1
6
1
,
t b
T Tp T i i
i i
pT TT Tp aT T Ti i ii
i ipi i
pT m g m gT i
ip i
IM q M M M I Rp R
RpR
m II IC q q q C q C I Rp R q Rc M M Rp
m Rc RRpR Rp R
m g IG q Q Q
m RcR g RpR
ω ω
=
= =
=
⎡ ⎤ ⎡ ⎤= + +⎢ ⎥ ⎣ ⎦⎣ ⎦
⎡ ⎤⎡ ⎤ ⎡ ⎤⎡ ⎤= + + + +⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦
⎣ ⎦ ⎣ ⎦⎣ ⎦⎡ ⎤ ⎡ ⎤
= − − +⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
∑
∑ ∑
∑
3.6 Feedback Linearization
In this section we formulate the feedback linearization problem to perform motion control
of the Stewart platform manipulator [36]. Given the end effector trajectory, this will

49
allow us to modulate the actuator forces so that the end effector will converge to the
desired trajectory and the error in the solution converges to zero. The basic idea of
feedback linearization is to construct a control law to cancel all nonlinearities of a
nonlinear dynamical system via full-state nonlinear feedback, allowing traditional linear
control techniques such as PD control to be easily implemented on the nonlinear system.
Due to its very good performance characteristics proven in literature, it is popular and
widely used control method in field of robotics. In this section, we briefly summarize the
application of such feedback linearization to our Stewart platform type parallel robot
system. From Equation. (3.53), we can see our system shares the same general form of
equation of motion as simple mechanical system, thus, we can derive the feedback
linearization control law in same way.
To meet the trajectory tracking requirement in our work, we consider a PD controller
based feedback linearization technique. Let dq , dq and dq represent the desired trajectory
position, velocity and acceleration information. We define error between actual and
desired trajectory as
( ) ( )de q t q t= − (3.54)
Let d p dq q K e K e= + + and substitute in equation(3.53), we get the control input as
( ) ( )( ) ( ) ( )1,T
p dF J M q q K e K e C q q q G q− ⎡ ⎤= + + + +⎣ ⎦ (3.55)
Then, by substituting Equation (3.55)into Equation (3.53) we have the error dynamics of
the system as follows
( )( ) 0p dM q e K e K e+ + = (3.56)
Since ( )M q is inertia matrix of the system we have ( ) 0M q ≠ . We have the linear
differential equation that governs the error between the actual and desired trajectories, as
follows
0p de K e K e+ + = (3.57)
By choosing pK and dK as positive definite, symmetric matrices, we can easily ensure
that the controlled system is stable and e becomes exponentially 0 when t is infinity.
50
Proof: By taking the laplace transform of the error dynamics equation, we have
( ) ( ) ( )2 0p ds e s K e s K se s+ + = (3.58)
Then we have the characteristic equation for the linearized system as follows
2 0d ps sK K+ + = (3.59)
The roots of the characteristic equation are
21 1 42 2d d ps K K K⎛ ⎞= − ± −⎜ ⎟
⎝ ⎠ (3.60)
Form Equation (3.60) we can see, by the system will be stable as long as p K and d K are
positive definite, symmetric matrices.
3.7 Musculoskeletal System Analysis
Inverse dynamics analysis (IDA) can be thought as the main process of calculating muscles
forces within AnyBody Modeling Software system [39]. Given the motion to the
musculoskeletal model, Muscle and reaction forces are calculated by setting up the equations
of motion. Since there are more muscles than the degree of freedom, Redundancy posed by
the system indicates that there is no unique solution to the inverse dynamics problem. While
performing a body motion, the muscles collaborate according to some rational criteria which
when combined with the fact that muscles can only pull and not push results in an unique
recruitment pattern [38]. If such optimal criteria are combined with the equilibrium
equations, we can have unique solution for the problem. The basic optimality assumption is
that “the body attempts to use its muscles in such a way that fatigue is postponed as far as
possible”. Hence in our optimization problem we would minimize the maximum muscle
activity subject to equilibrium constraints and positive muscle force constraint. Hence the
optimization problem for calculating the muscle forces can be mathematically written as:
,
1
,
:
:
0 : 1,...,
pnM i
i i
M i
FMinimize V
NSubjecttoCf dF i n
=
⎛ ⎞= ⎜ ⎟
⎝ ⎠
=≥ =
∑ (3.61)

51
,M iF is ith muscle force and iN is peak muscle force and Cf d= is equilibrium equation.
Various forms of this optimization problem may be created raising the power of the
individual muscle activity to a polynomial power, ‘p’. With increasing value of ‘p’, the
criteria tend to distribute the relative load evenly between the muscles.
The min/max objective function is non-differentiable and therefore appears to complicate the
practical solution of the optimization problem. However, by using bound formulation which
is widely used and well-tested in the field of optimum engineering design we can easily solve
the min/max problems [39]. By introducing a new artificial variable β and an artificial
criterion function ( )B β and the new criterion can be a monotonic function of β . By
choosing the ( )B β = β we can reformulate the above problem as :
{ }
,
,
:
0
; 1,...
M i
M i
i
MinimizeSubjectCf dFF
i nN
β
β
=≥
≤ ∈
(3.62)
In the min/max optimization problem we are looking at the muscle recruitment that balances
the exterior loads and minimizes the largest relative load on any muscle in the system, hereby
postponing fatigue of the muscle as far as possible. This is the approach used with in the
AnyBody software.
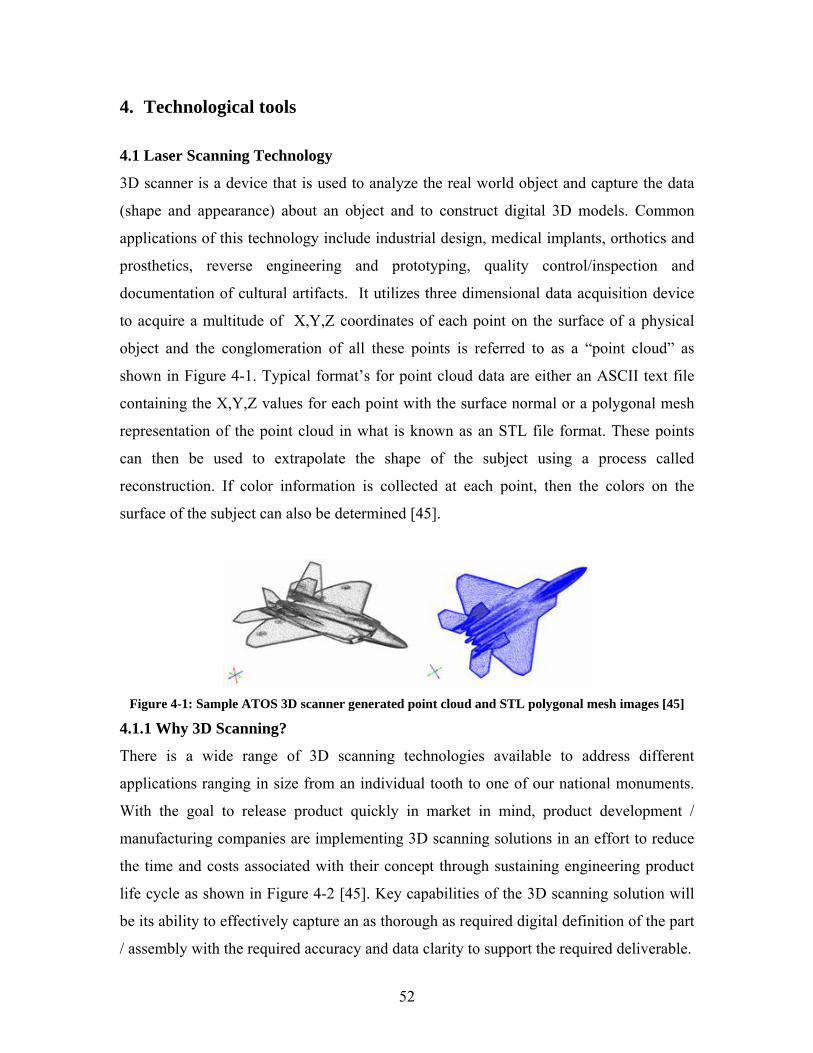
52
4. Technological tools 4.1 Laser Scanning Technology
3D scanner is a device that is used to analyze the real world object and capture the data
(shape and appearance) about an object and to construct digital 3D models. Common
applications of this technology include industrial design, medical implants, orthotics and
prosthetics, reverse engineering and prototyping, quality control/inspection and
documentation of cultural artifacts. It utilizes three dimensional data acquisition device
to acquire a multitude of X,Y,Z coordinates of each point on the surface of a physical
object and the conglomeration of all these points is referred to as a “point cloud” as
shown in Figure 4-1. Typical format’s for point cloud data are either an ASCII text file
containing the X,Y,Z values for each point with the surface normal or a polygonal mesh
representation of the point cloud in what is known as an STL file format. These points
can then be used to extrapolate the shape of the subject using a process called
reconstruction. If color information is collected at each point, then the colors on the
surface of the subject can also be determined [45].
Figure 4-1: Sample ATOS 3D scanner generated point cloud and STL polygonal mesh images [45]
4.1.1 Why 3D Scanning?
There is a wide range of 3D scanning technologies available to address different
applications ranging in size from an individual tooth to one of our national monuments.
With the goal to release product quickly in market in mind, product development /
manufacturing companies are implementing 3D scanning solutions in an effort to reduce
the time and costs associated with their concept through sustaining engineering product
life cycle as shown in Figure 4-2 [45]. Key capabilities of the 3D scanning solution will
be its ability to effectively capture an as thorough as required digital definition of the part
/ assembly with the required accuracy and data clarity to support the required deliverable.
53
Figure 4-2: Simplified serial depiction of an iterative generic Concept through Sustaining
Engineering Process [45]
4.1.2 Different Types of 3D Scanning Technology [50]:
• Contact Scanning:
Contact 3D scanners probe the subject through physical touch. A CMM
(coordinate measuring machine) shown in Figure 4-4 is an example of a contact
3D scanner. It is used mostly in manufacturing and can be very precise. The
disadvantage of CMMs though, is that it requires contact with the object being
scanned and can cause damage while scanning delicate objects. The other
disadvantage of CMMs is that they are relatively slow operating at few hundred
Hz as compared to the other scanning methods operating from 10 to 500 kHz.
Other examples are the hand driven touch probes as shown in Figure 4-3 used to
digitize clay models in computer animation industry.
Figure 4-3: 3D Digitizer from Immersion Figure 4-4: Co-ordinate Measuring Machine
• Non contact scanning: Active scanners emit some kind of radiation or light and
detect its reflection in order to probe an object or environment. Possible types of
emissions used include light, ultrasound or x-ray. The types of these scanners are:
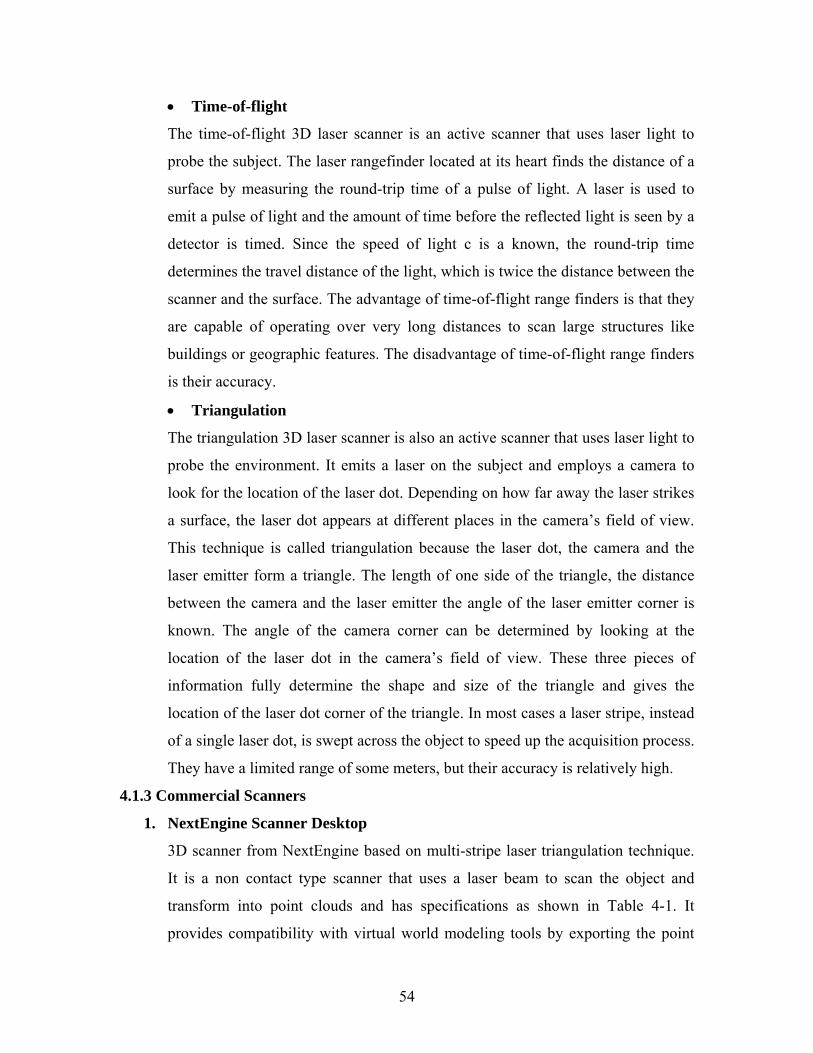
54
• Time-of-flight
The time-of-flight 3D laser scanner is an active scanner that uses laser light to
probe the subject. The laser rangefinder located at its heart finds the distance of a
surface by measuring the round-trip time of a pulse of light. A laser is used to
emit a pulse of light and the amount of time before the reflected light is seen by a
detector is timed. Since the speed of light c is a known, the round-trip time
determines the travel distance of the light, which is twice the distance between the
scanner and the surface. The advantage of time-of-flight range finders is that they
are capable of operating over very long distances to scan large structures like
buildings or geographic features. The disadvantage of time-of-flight range finders
is their accuracy.
• Triangulation
The triangulation 3D laser scanner is also an active scanner that uses laser light to
probe the environment. It emits a laser on the subject and employs a camera to
look for the location of the laser dot. Depending on how far away the laser strikes
a surface, the laser dot appears at different places in the camera’s field of view.
This technique is called triangulation because the laser dot, the camera and the
laser emitter form a triangle. The length of one side of the triangle, the distance
between the camera and the laser emitter the angle of the laser emitter corner is
known. The angle of the camera corner can be determined by looking at the
location of the laser dot in the camera’s field of view. These three pieces of
information fully determine the shape and size of the triangle and gives the
location of the laser dot corner of the triangle. In most cases a laser stripe, instead
of a single laser dot, is swept across the object to speed up the acquisition process.
They have a limited range of some meters, but their accuracy is relatively high.
4.1.3 Commercial Scanners
1. NextEngine Scanner Desktop
3D scanner from NextEngine based on multi-stripe laser triangulation technique.
It is a non contact type scanner that uses a laser beam to scan the object and
transform into point clouds and has specifications as shown in Table 4-1. It
provides compatibility with virtual world modeling tools by exporting the point
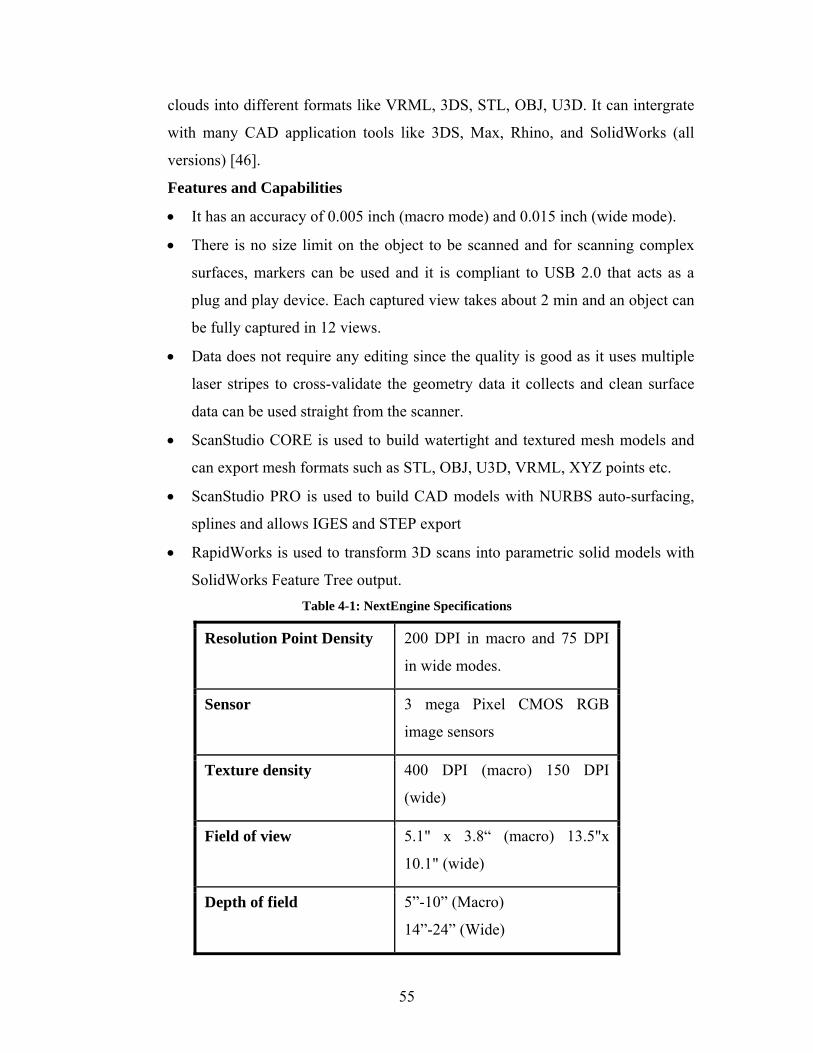
55
clouds into different formats like VRML, 3DS, STL, OBJ, U3D. It can intergrate
with many CAD application tools like 3DS, Max, Rhino, and SolidWorks (all
versions) [46].
Features and Capabilities
• It has an accuracy of 0.005 inch (macro mode) and 0.015 inch (wide mode).
• There is no size limit on the object to be scanned and for scanning complex
surfaces, markers can be used and it is compliant to USB 2.0 that acts as a
plug and play device. Each captured view takes about 2 min and an object can
be fully captured in 12 views.
• Data does not require any editing since the quality is good as it uses multiple
laser stripes to cross-validate the geometry data it collects and clean surface
data can be used straight from the scanner.
• ScanStudio CORE is used to build watertight and textured mesh models and
can export mesh formats such as STL, OBJ, U3D, VRML, XYZ points etc.
• ScanStudio PRO is used to build CAD models with NURBS auto-surfacing,
splines and allows IGES and STEP export
• RapidWorks is used to transform 3D scans into parametric solid models with
SolidWorks Feature Tree output. Table 4-1: NextEngine Specifications
Resolution Point Density 200 DPI in macro and 75 DPI
in wide modes.
Sensor 3 mega Pixel CMOS RGB
image sensors
Texture density 400 DPI (macro) 150 DPI
(wide)
Field of view 5.1" x 3.8“ (macro) 13.5"x
10.1" (wide)
Depth of field 5”-10” (Macro)
14”-24” (Wide)
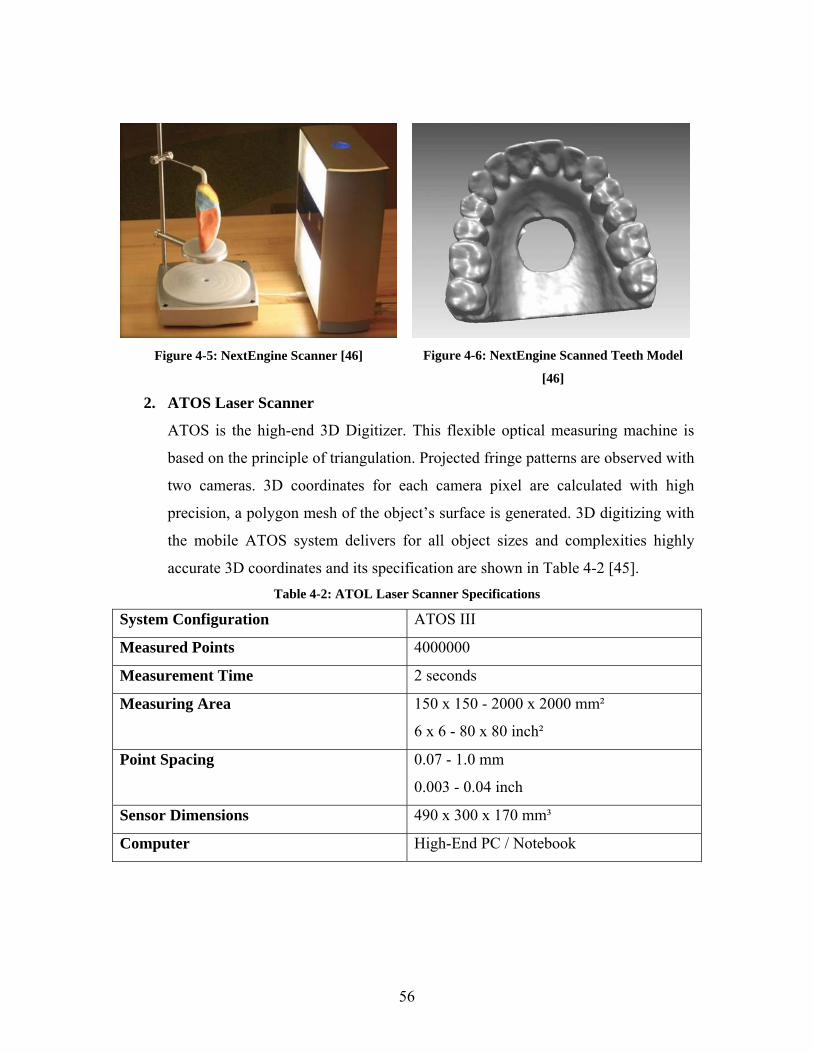
56
Figure 4-5: NextEngine Scanner [46]
Figure 4-6: NextEngine Scanned Teeth Model
[46]
2. ATOS Laser Scanner
ATOS is the high-end 3D Digitizer. This flexible optical measuring machine is
based on the principle of triangulation. Projected fringe patterns are observed with
two cameras. 3D coordinates for each camera pixel are calculated with high
precision, a polygon mesh of the object’s surface is generated. 3D digitizing with
the mobile ATOS system delivers for all object sizes and complexities highly
accurate 3D coordinates and its specification are shown in Table 4-2 [45]. Table 4-2: ATOL Laser Scanner Specifications
System Configuration ATOS III
Measured Points 4000000
Measurement Time 2 seconds
Measuring Area 150 x 150 - 2000 x 2000 mm²
6 x 6 - 80 x 80 inch²
Point Spacing 0.07 - 1.0 mm
0.003 - 0.04 inch
Sensor Dimensions 490 x 300 x 170 mm³
Computer High-End PC / Notebook
57
Figure 4-7: ATOS 3D Laser Scanner
4.1.4 Generation of CAD Model of Vertebrate Skull and Mandible
CAD models of mandible and skull can be built either using laser Scanning or CT
scanning.
1. Laser Scanning
Physical model of mandible and skull painted in grey (Figure 4-9) can be placed in
front of a laser scanner to obtain the measurement of 3D co-ordinate as shown in
Figure 4-8. ATOS laser scanner was used at Fisher-Price, Inc to obtain CAD models
of mandible and skull. Firstly the object was painted grey so that laser can detect all
the points on the object. Markers were placed on the object to allow the software to
align different scans. The physical model of lower jaw and upper jaw were placed on
a table and the laser was allowed to fall on all the surfaces of the object. As the laser
reflects back from these surfaces, the 3D co-ordinates are measured. For every scan,
atleast three markers points should be visible to the laser to form a bounding box and
automatically align different scans. After scanning all the surfaces and aligning them
we get a cloud of points which can be meshed to form a STL file as seen from Figures
4-10, 4-11 and Figures 4-14, 4-15 (either ASCII or BINARY). This STL files had
some holes and missing surfaces. The entire geometry was cleaned up in Geomagics
to create a STL mesh without any holes and missing surfaces as shown in Figures 4-
12, 4-13 and Figure 4-16, 4-17.
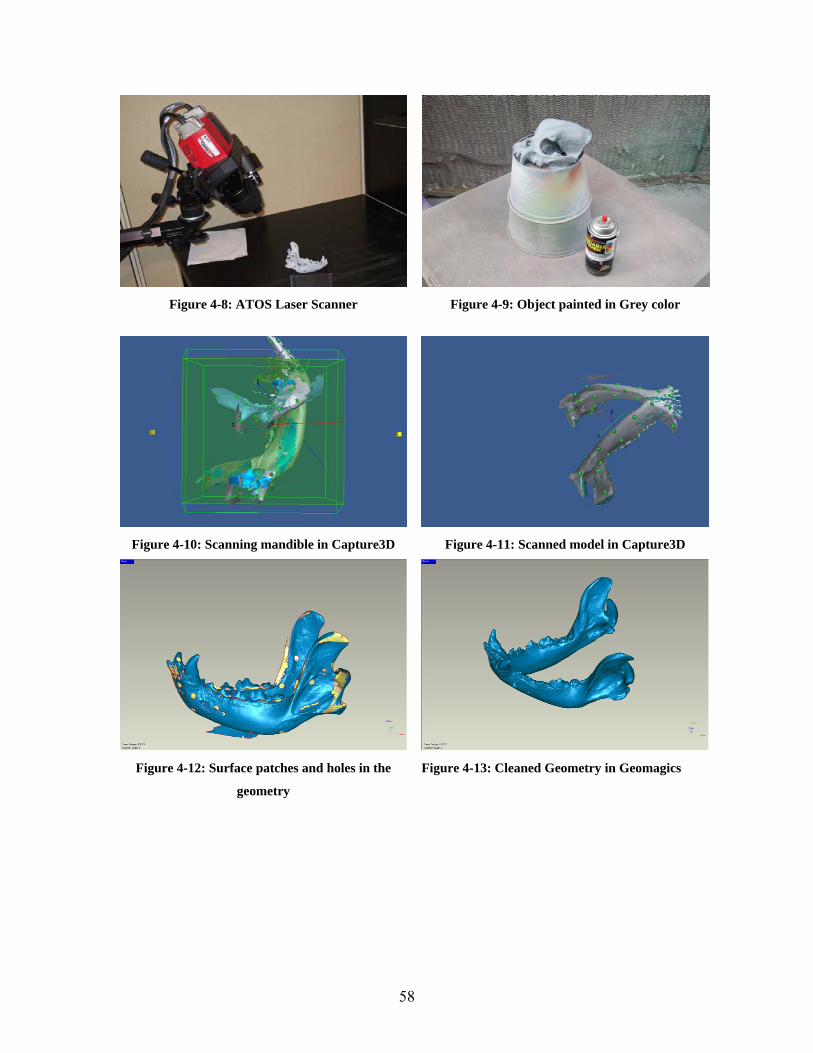
58
Figure 4-8: ATOS Laser Scanner Figure 4-9: Object painted in Grey color
Figure 4-10: Scanning mandible in Capture3D
Figure 4-11: Scanned model in Capture3D
Figure 4-12: Surface patches and holes in the
geometry
Figure 4-13: Cleaned Geometry in Geomagics
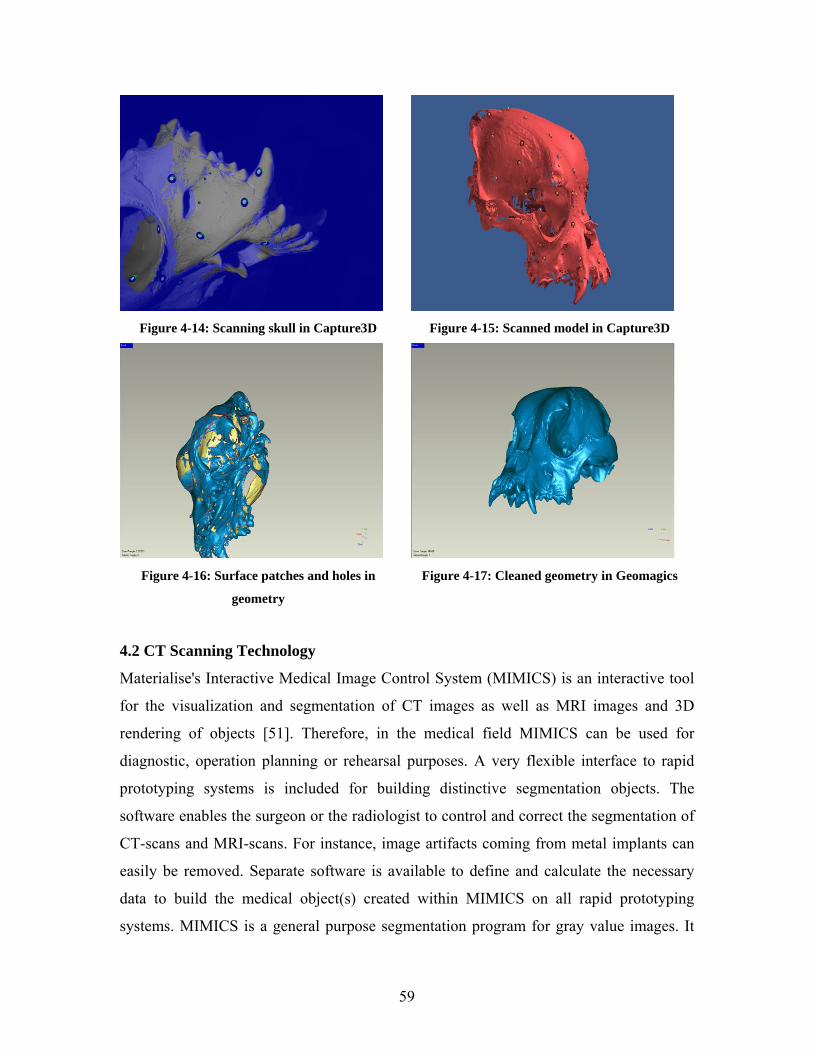
59
Figure 4-14: Scanning skull in Capture3D
Figure 4-15: Scanned model in Capture3D
Figure 4-16: Surface patches and holes in
geometry
Figure 4-17: Cleaned geometry in Geomagics
4.2 CT Scanning Technology
Materialise's Interactive Medical Image Control System (MIMICS) is an interactive tool
for the visualization and segmentation of CT images as well as MRI images and 3D
rendering of objects [51]. Therefore, in the medical field MIMICS can be used for
diagnostic, operation planning or rehearsal purposes. A very flexible interface to rapid
prototyping systems is included for building distinctive segmentation objects. The
software enables the surgeon or the radiologist to control and correct the segmentation of
CT-scans and MRI-scans. For instance, image artifacts coming from metal implants can
easily be removed. Separate software is available to define and calculate the necessary
data to build the medical object(s) created within MIMICS on all rapid prototyping
systems. MIMICS is a general purpose segmentation program for gray value images. It
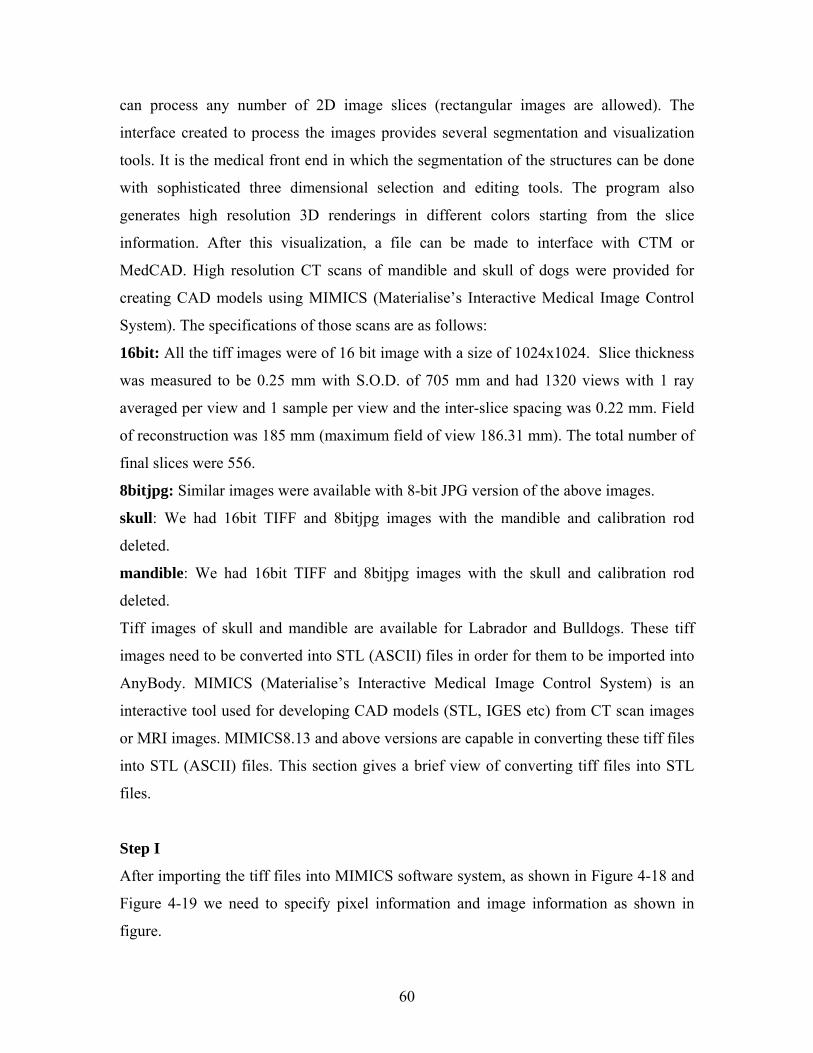
60
can process any number of 2D image slices (rectangular images are allowed). The
interface created to process the images provides several segmentation and visualization
tools. It is the medical front end in which the segmentation of the structures can be done
with sophisticated three dimensional selection and editing tools. The program also
generates high resolution 3D renderings in different colors starting from the slice
information. After this visualization, a file can be made to interface with CTM or
MedCAD. High resolution CT scans of mandible and skull of dogs were provided for
creating CAD models using MIMICS (Materialise’s Interactive Medical Image Control
System). The specifications of those scans are as follows:
16bit: All the tiff images were of 16 bit image with a size of 1024x1024. Slice thickness
was measured to be 0.25 mm with S.O.D. of 705 mm and had 1320 views with 1 ray
averaged per view and 1 sample per view and the inter-slice spacing was 0.22 mm. Field
of reconstruction was 185 mm (maximum field of view 186.31 mm). The total number of
final slices were 556.
8bitjpg: Similar images were available with 8-bit JPG version of the above images.
skull: We had 16bit TIFF and 8bitjpg images with the mandible and calibration rod
deleted.
mandible: We had 16bit TIFF and 8bitjpg images with the skull and calibration rod
deleted.
Tiff images of skull and mandible are available for Labrador and Bulldogs. These tiff
images need to be converted into STL (ASCII) files in order for them to be imported into
AnyBody. MIMICS (Materialise’s Interactive Medical Image Control System) is an
interactive tool used for developing CAD models (STL, IGES etc) from CT scan images
or MRI images. MIMICS8.13 and above versions are capable in converting these tiff files
into STL (ASCII) files. This section gives a brief view of converting tiff files into STL
files.
Step I
After importing the tiff files into MIMICS software system, as shown in Figure 4-18 and
Figure 4-19 we need to specify pixel information and image information as shown in
figure.
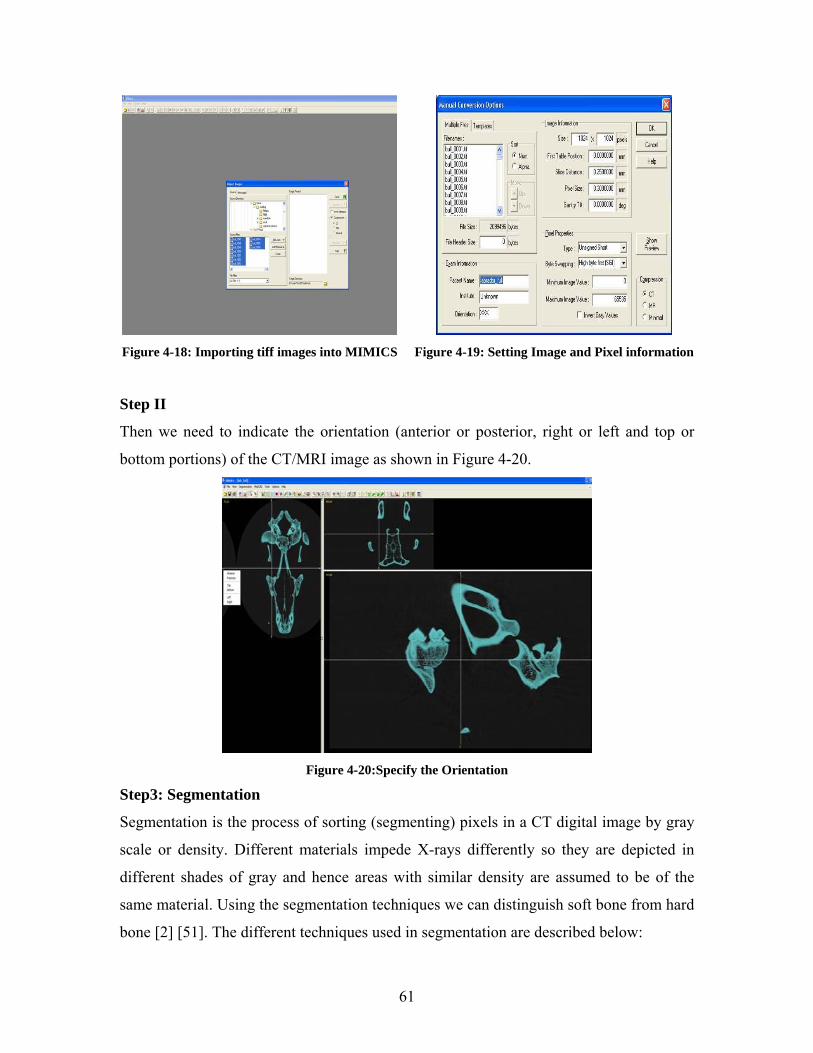
61
Figure 4-18: Importing tiff images into MIMICS
Figure 4-19: Setting Image and Pixel information
Step II
Then we need to indicate the orientation (anterior or posterior, right or left and top or
bottom portions) of the CT/MRI image as shown in Figure 4-20.
Figure 4-20:Specify the Orientation
Step3: Segmentation
Segmentation is the process of sorting (segmenting) pixels in a CT digital image by gray
scale or density. Different materials impede X-rays differently so they are depicted in
different shades of gray and hence areas with similar density are assumed to be of the
same material. Using the segmentation techniques we can distinguish soft bone from hard
bone [2] [51]. The different techniques used in segmentation are described below:
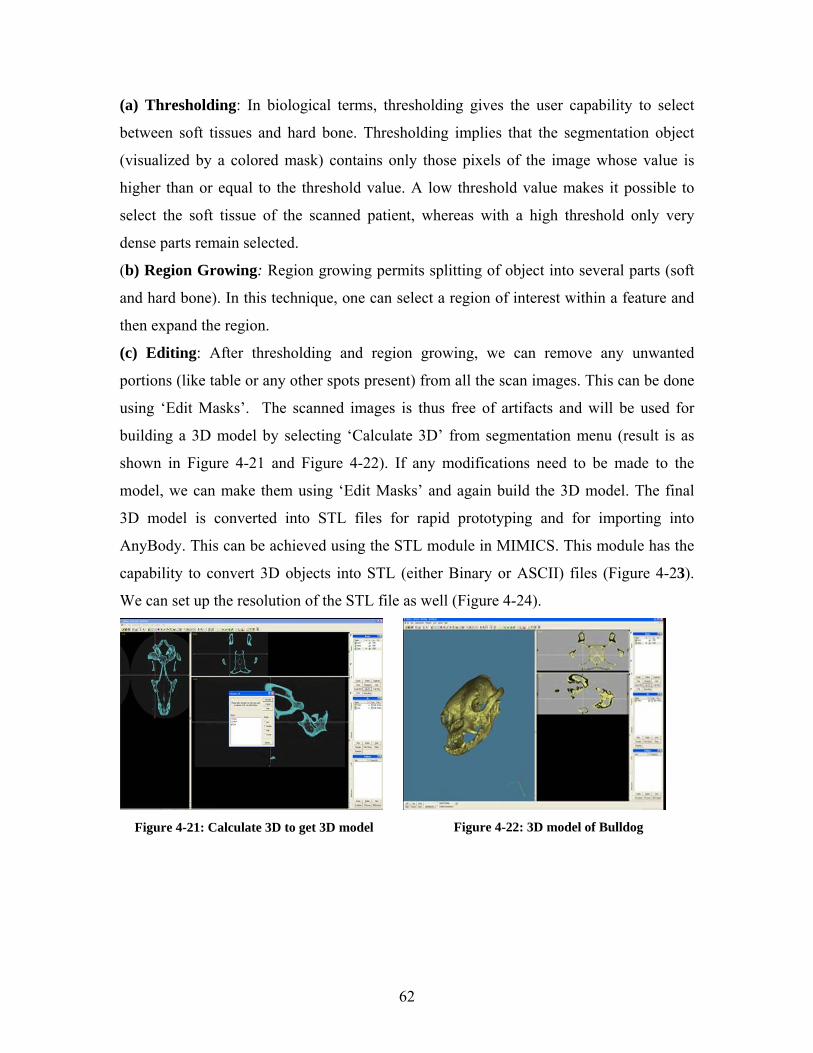
62
(a) Thresholding: In biological terms, thresholding gives the user capability to select
between soft tissues and hard bone. Thresholding implies that the segmentation object
(visualized by a colored mask) contains only those pixels of the image whose value is
higher than or equal to the threshold value. A low threshold value makes it possible to
select the soft tissue of the scanned patient, whereas with a high threshold only very
dense parts remain selected.
(b) Region Growing: Region growing permits splitting of object into several parts (soft
and hard bone). In this technique, one can select a region of interest within a feature and
then expand the region.
(c) Editing: After thresholding and region growing, we can remove any unwanted
portions (like table or any other spots present) from all the scan images. This can be done
using ‘Edit Masks’. The scanned images is thus free of artifacts and will be used for
building a 3D model by selecting ‘Calculate 3D’ from segmentation menu (result is as
shown in Figure 4-21 and Figure 4-22). If any modifications need to be made to the
model, we can make them using ‘Edit Masks’ and again build the 3D model. The final
3D model is converted into STL files for rapid prototyping and for importing into
AnyBody. This can be achieved using the STL module in MIMICS. This module has the
capability to convert 3D objects into STL (either Binary or ASCII) files (Figure 4-23).
We can set up the resolution of the STL file as well (Figure 4-24).
Figure 4-21: Calculate 3D to get 3D model
Figure 4-22: 3D model of Bulldog
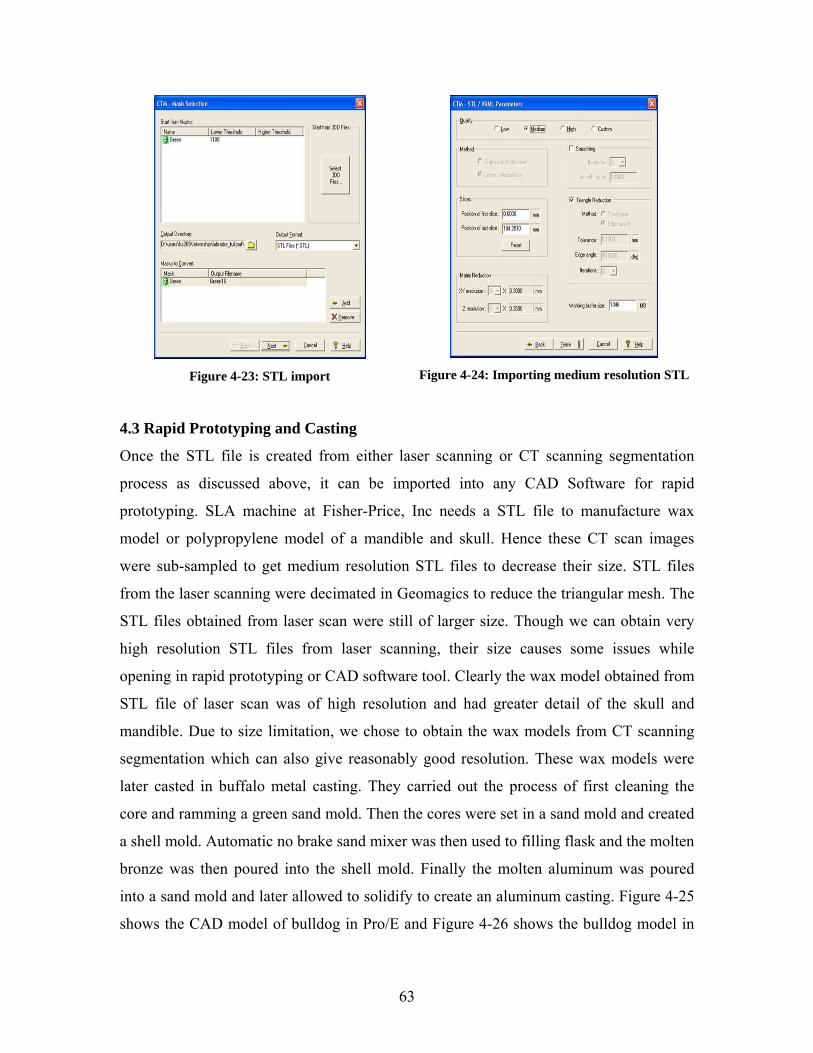
63
Figure 4-23: STL import
Figure 4-24: Importing medium resolution STL
4.3 Rapid Prototyping and Casting
Once the STL file is created from either laser scanning or CT scanning segmentation
process as discussed above, it can be imported into any CAD Software for rapid
prototyping. SLA machine at Fisher-Price, Inc needs a STL file to manufacture wax
model or polypropylene model of a mandible and skull. Hence these CT scan images
were sub-sampled to get medium resolution STL files to decrease their size. STL files
from the laser scanning were decimated in Geomagics to reduce the triangular mesh. The
STL files obtained from laser scan were still of larger size. Though we can obtain very
high resolution STL files from laser scanning, their size causes some issues while
opening in rapid prototyping or CAD software tool. Clearly the wax model obtained from
STL file of laser scan was of high resolution and had greater detail of the skull and
mandible. Due to size limitation, we chose to obtain the wax models from CT scanning
segmentation which can also give reasonably good resolution. These wax models were
later casted in buffalo metal casting. They carried out the process of first cleaning the
core and ramming a green sand mold. Then the cores were set in a sand mold and created
a shell mold. Automatic no brake sand mixer was then used to filling flask and the molten
bronze was then poured into the shell mold. Finally the molten aluminum was poured
into a sand mold and later allowed to solidify to create an aluminum casting. Figure 4-25
shows the CAD model of bulldog in Pro/E and Figure 4-26 shows the bulldog model in
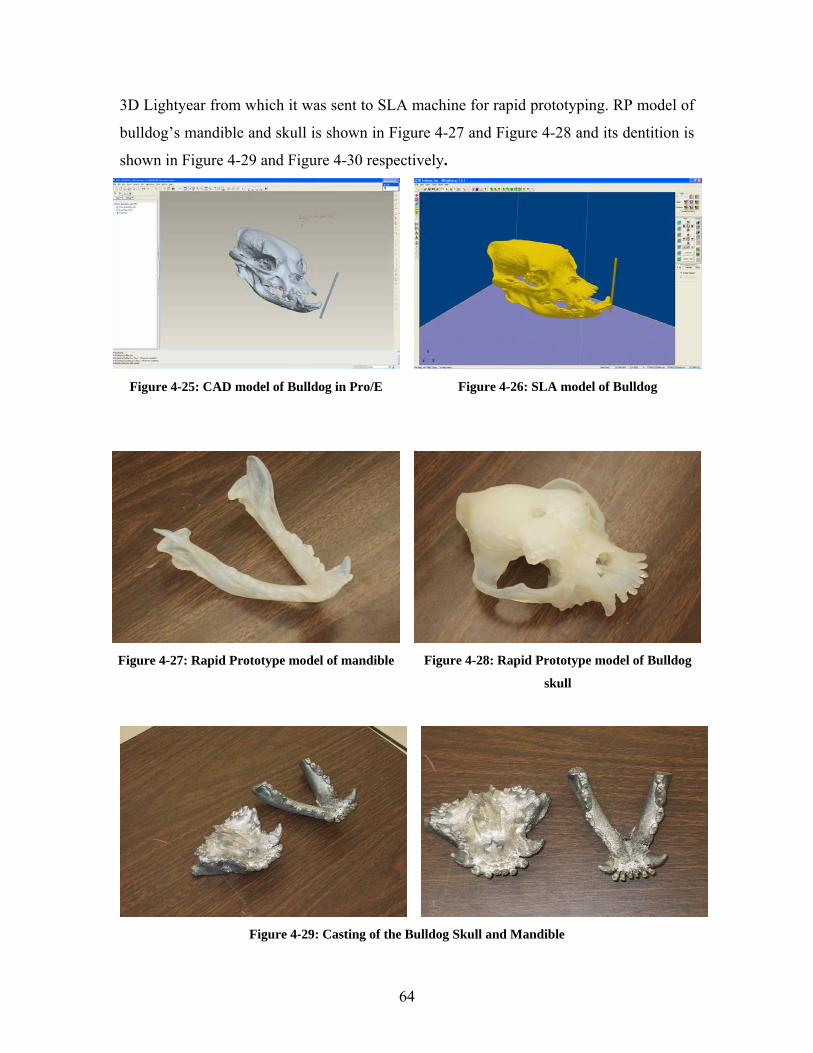
64
3D Lightyear from which it was sent to SLA machine for rapid prototyping. RP model of
bulldog’s mandible and skull is shown in Figure 4-27 and Figure 4-28 and its dentition is
shown in Figure 4-29 and Figure 4-30 respectively.
Figure 4-25: CAD model of Bulldog in Pro/E Figure 4-26: SLA model of Bulldog
Figure 4-27: Rapid Prototype model of mandible Figure 4-28: Rapid Prototype model of Bulldog
skull
Figure 4-29: Casting of the Bulldog Skull and Mandible

65
4.4 Motion Capture Analysis Technology
Motion capture technology is a process by which movement is digitally recorded. The
technique was originally used for military tracking purposes and in sports as a tool for
biomechanic research which focused on the mechanical functioning of the body, like how
the segments and muscles work and move. In the decade, motion capture has become an
essential tool in the entertainment business, giving computer animators the ability to
make non-human characters more life-like. It's a technology used in animated films and
television as well as video games.
Since we want to simulate a jaw mastication motion, it is required to track the movement
of jaw performing chewing/biting/clenching action. However first step involved in a
motion capture process is to calibrate the cameras. A known 3D grid/box is captured in
one single frame and calibrated by specifying the appropriate co-ordinates of the markers
on the 3D grid in a 3D space w.r.t. an origin point on that same 3D grid and the steps are
shown in Figure 4-36 and Figure 4-37. Figures 4-30 and 4-30 below show calibration of
two cameras used for the jaw motion capture of a human subject. We need to specify the
co-ordinates of the eight points on a 3D calibration grid inclusive of the origin point. The
SIMI motion software applies DLT algorithm to calibrate the camera and the consistency
of all the points can be checked for accuracy. After the calibration process is finished,
next step is to capture the mastication motion of a human subject in 3D space with the
markers placed on Right TMJ point, Left TMJ point and Front Incisor point. This motion
is captured at real time at 100 Hz and transferred to the PC using firewire cable at very
low latency. Figure 4-36 below shows jaw motion capture of a male human subject
without any joint disorders. After transferring the motion data to the PC, we need to
digitize these three marker points in every frame. Alternatively we can digitize these
three marker points in the first frame and track these points automatically through to the
last frame. Similarly all these markers points are digitized and tracked for the other
camera.
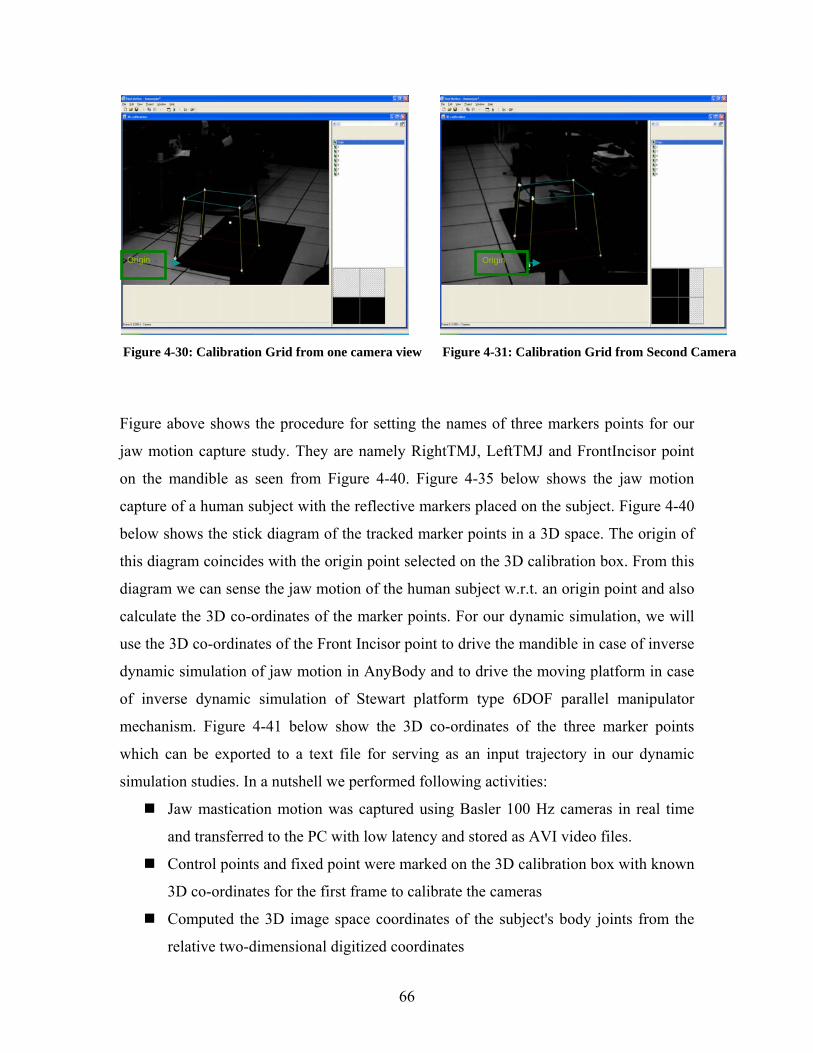
66
Figure 4-30: Calibration Grid from one camera view
Figure 4-31: Calibration Grid from Second Camera
Figure above shows the procedure for setting the names of three markers points for our
jaw motion capture study. They are namely RightTMJ, LeftTMJ and FrontIncisor point
on the mandible as seen from Figure 4-40. Figure 4-35 below shows the jaw motion
capture of a human subject with the reflective markers placed on the subject. Figure 4-40
below shows the stick diagram of the tracked marker points in a 3D space. The origin of
this diagram coincides with the origin point selected on the 3D calibration box. From this
diagram we can sense the jaw motion of the human subject w.r.t. an origin point and also
calculate the 3D co-ordinates of the marker points. For our dynamic simulation, we will
use the 3D co-ordinates of the Front Incisor point to drive the mandible in case of inverse
dynamic simulation of jaw motion in AnyBody and to drive the moving platform in case
of inverse dynamic simulation of Stewart platform type 6DOF parallel manipulator
mechanism. Figure 4-41 below show the 3D co-ordinates of the three marker points
which can be exported to a text file for serving as an input trajectory in our dynamic
simulation studies. In a nutshell we performed following activities:
Jaw mastication motion was captured using Basler 100 Hz cameras in real time
and transferred to the PC with low latency and stored as AVI video files.
Control points and fixed point were marked on the 3D calibration box with known
3D co-ordinates for the first frame to calibrate the cameras
Computed the 3D image space coordinates of the subject's body joints from the
relative two-dimensional digitized coordinates
Origin Origin
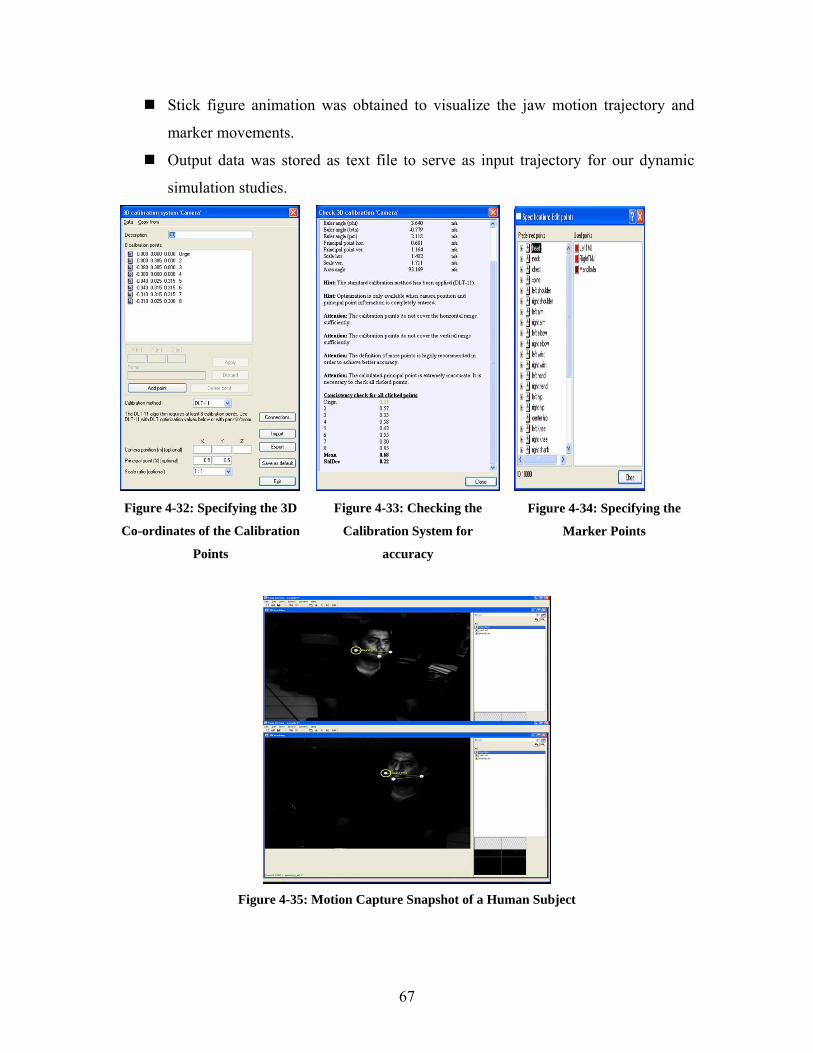
67
Stick figure animation was obtained to visualize the jaw motion trajectory and
marker movements.
Output data was stored as text file to serve as input trajectory for our dynamic
simulation studies.
Figure 4-32: Specifying the 3D
Co-ordinates of the Calibration
Points
Figure 4-33: Checking the
Calibration System for
accuracy
Figure 4-34: Specifying the
Marker Points
Figure 4-35: Motion Capture Snapshot of a Human Subject
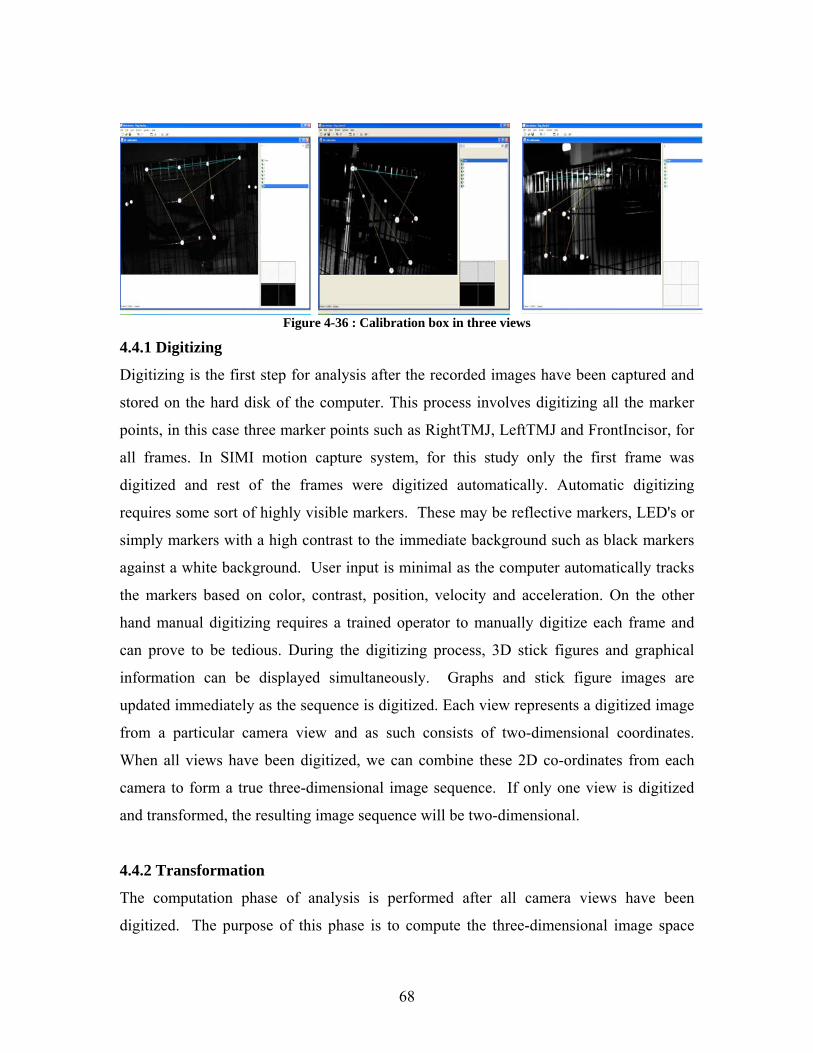
68
Figure 4-36 : Calibration box in three views
4.4.1 Digitizing
Digitizing is the first step for analysis after the recorded images have been captured and
stored on the hard disk of the computer. This process involves digitizing all the marker
points, in this case three marker points such as RightTMJ, LeftTMJ and FrontIncisor, for
all frames. In SIMI motion capture system, for this study only the first frame was
digitized and rest of the frames were digitized automatically. Automatic digitizing
requires some sort of highly visible markers. These may be reflective markers, LED's or
simply markers with a high contrast to the immediate background such as black markers
against a white background. User input is minimal as the computer automatically tracks
the markers based on color, contrast, position, velocity and acceleration. On the other
hand manual digitizing requires a trained operator to manually digitize each frame and
can prove to be tedious. During the digitizing process, 3D stick figures and graphical
information can be displayed simultaneously. Graphs and stick figure images are
updated immediately as the sequence is digitized. Each view represents a digitized image
from a particular camera view and as such consists of two-dimensional coordinates.
When all views have been digitized, we can combine these 2D co-ordinates from each
camera to form a true three-dimensional image sequence. If only one view is digitized
and transformed, the resulting image sequence will be two-dimensional.
4.4.2 Transformation
The computation phase of analysis is performed after all camera views have been
digitized. The purpose of this phase is to compute the three-dimensional image space
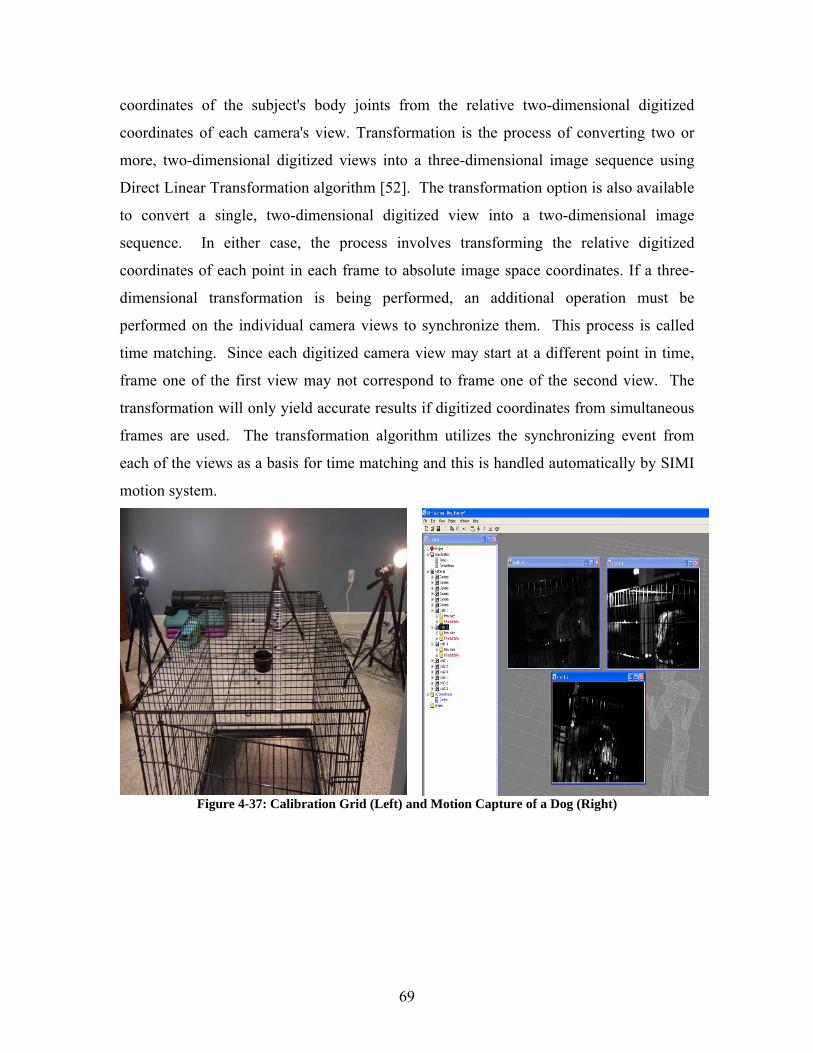
69
coordinates of the subject's body joints from the relative two-dimensional digitized
coordinates of each camera's view. Transformation is the process of converting two or
more, two-dimensional digitized views into a three-dimensional image sequence using
Direct Linear Transformation algorithm [52]. The transformation option is also available
to convert a single, two-dimensional digitized view into a two-dimensional image
sequence. In either case, the process involves transforming the relative digitized
coordinates of each point in each frame to absolute image space coordinates. If a three-
dimensional transformation is being performed, an additional operation must be
performed on the individual camera views to synchronize them. This process is called
time matching. Since each digitized camera view may start at a different point in time,
frame one of the first view may not correspond to frame one of the second view. The
transformation will only yield accurate results if digitized coordinates from simultaneous
frames are used. The transformation algorithm utilizes the synchronizing event from
each of the views as a basis for time matching and this is handled automatically by SIMI
motion system.
Figure 4-37: Calibration Grid (Left) and Motion Capture of a Dog (Right)
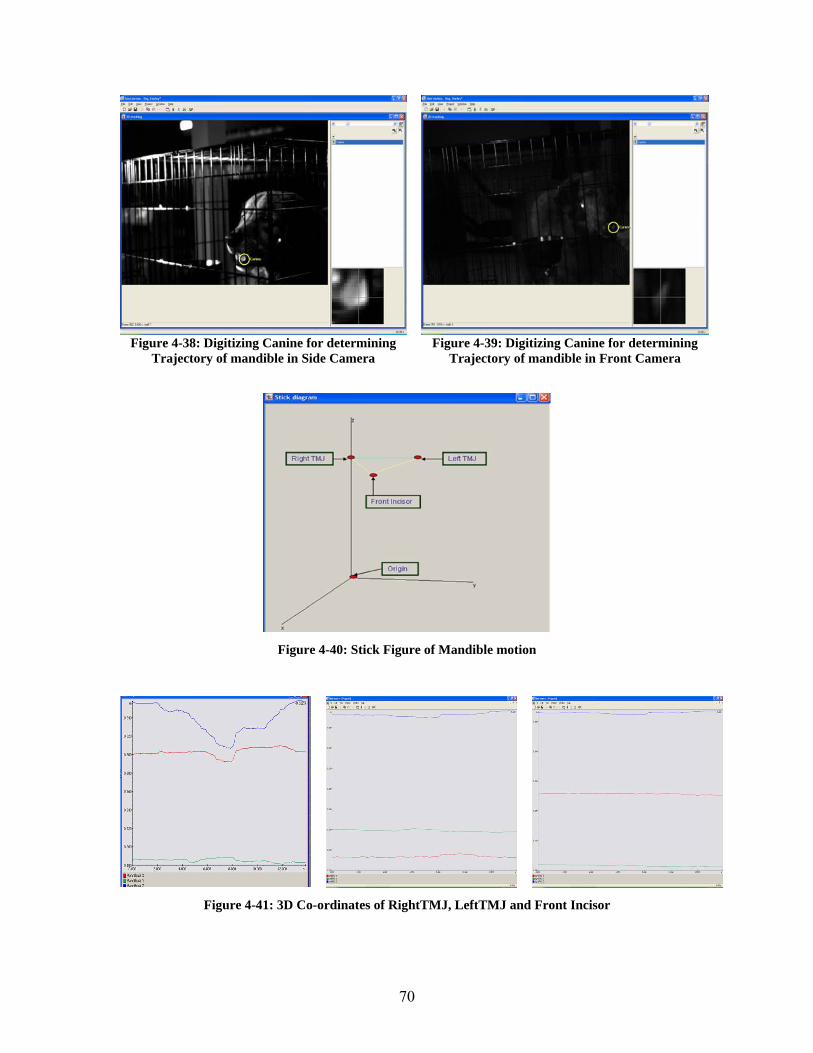
70
Figure 4-38: Digitizing Canine for determining Trajectory of mandible in Side Camera
Figure 4-39: Digitizing Canine for determining Trajectory of mandible in Front Camera
Figure 4-40: Stick Figure of Mandible motion
Figure 4-41: 3D Co-ordinates of RightTMJ, LeftTMJ and Front Incisor

71
4.4.3 DLT
The traditional method used to convert digitized coordinate locations to image space
coordinate locations utilizes a widely used method known as the Direct Linear
Transformation or DLT [52]. In this "mapping" process, the known image coordinates,
as well as the digitized coordinates of the control points, are used to solve a set of
simultaneous linear equations which relate one set of coordinates to the other. This set of
equations is solved using linear least-squares method that yields the image space
coordinates of each point, given the digitized view coordinates of that point. The
advantage of this transformation method over more traditional methods is that one does
not need to know the location or orientation of the cameras, the distance of cameras to the
subject, or any information about the camera or projections lenses such as focal length
and magnification. Instead, by directly determining the relationship between the image
space and each of the digitized views, all the intervening image changes are eliminated,
and need not be considered. In order to utilize this method, there must be a known set of
control points in the video recording of each view. At least six non-coplanar control
points are required (though more can be used) for a three-dimensional analysis. This is
the minimum number of points required to solve the set of simultaneous linear equations
that produce the transformation. For a two dimensional analysis using a single camera, at
least four co-planar but non-collinear control points must be used. It is possible to use
more than the minimum number of control points, as this will increase the accuracy of the
transformation. The control points should be distributed to fill as much of the image
space as practical. If the control points all occur in a small portion of the image space,
then image distortion is likely to increase as the distance from the image to the control
points increases.
4.4.4 Technical Aspects for Transformation
The SIMI motion software considers the image space to be described by a right-handed
cartesian coordinate system with a fixed origin and orthogonal X, Y and Z coordinate
axes and an arbitrary point in the image space is described by its coordinates (x, y, z).
When a film recording of an object in the image space is projected on a flat screen
measure the location of points on this plane of projection, it measures the location of
72
points on this plane and can be described by its horizontal and vertical digitizer
coordinates (U, V). The general form of the transformation between these coordinate
systems may be expressed as:
U = Ax + By + Cz + D (1)
V= Ex + Fy + Gz + L
The coefficients, A through L, represent various physical parameters defined in the
configuration of the camera and the playback or projection system. In general, it is a
difficult process to determine the values for these coefficients by measurement of camera
orientation, distance of camera to subject, magnification of camera and projection lenses,
etc. If, however, the image space contains an adequate number of points (control points)
whose coordinate locations are accurately known, the coefficients can be determined
through the solution of a set of simultaneous linear equations relating the image space
coordinates of the control points to the digitized coordinate of the control points. Above
Equations can be rewritten in matrix form as shown in equations (2) to express the sets of
simultaneous equations that must be solved to determine the coefficients A through L.
Subscripts are used to denote the image space and digitizer coordinates of individual
control points. A minimum of six non-coplanar control points are required to solve
equations (3), although additional points may be used as indicated by the ellipses. If
more than six points are used, the set of equations becomes over-determined and may be
solved using a standard linear least squares technique [52].
For a given unknown image space point (x, y, z), equation (1) can be rearranged as:
{A - EU}{B - FU}{C - GU}x = {U - D} (2)
{H - EV}{J - FV}{K - GV}y = {V - L}
The digitizer coordinates (U,V) are known as the coefficients A through L from the
solution of equation (3). However, equation (4) cannot be solved for (x, y, z) since this
set of linear equations is underdetermined. Digitized information from one camera is
therefore not sufficient to determine three-dimensional image space coordinates. This
problem can be resolved by the addition of a second camera. For film or video
recordings, each joint location (x, y, and z) is a function of time, and therefore, digitized

73
camera information must be combined for the same moment in time. This is the purpose
of the "Time-Matching" step in the transformation process.
4.5 Musculoskeletal Model of Vertebrate Jaw
Some prior work has been done for simulating static clenching tasks and dynamic tasks in
the case of human mandible musculoskeletal model. Our goal is to create a
musculoskeletal model of a mandible for different vertebrates such as sabertooth cat,
bulldog and human and simulate dynamics of chewing behavior and determine muscles
forces and TMJ reaction forces. For initial simulation we will recreate a musculoskeletal
model of a human mandible with our motion capture data and muscle attachment points
and properties from Koolstra et al. and compare them with human mandible model
created by Mark et al. for validation purposes. Our focus will then be to extend this for
creating musculoskeletal models of sabertooth and bulldog mandible and compute muscle
forces and TMJ reaction forces based on the motion capture data and architectural
properties of muscle obtained from CT scan and dissection.
A three dimensional model of the vertebrate masticatory system (for human see Figure 4-
41 and 4-42) containing seven masticatory muscles namely one masseter, three
temporalis, medial pterygoid, lateral pterygoid and digastric on each side and two
temporomandibular joints has been developed using AnyBody Modeling system. The
AnyBody Modeling System is a commercial software package that combines a solver for
the multi-body inverse dynamics problem with optimizers that may be used for the
solution of the muscle recruitment problem [39]. The optimizer implemented in AnyBody
uses a min/max objective function. The models in AnyBody are defined in a text-based,
declarative, object-oriented language called AnyScript. The model of the mandible was
based on repository of AnyBody Software. The two separate 3D geometries of mandible
and skull were acquired from the repository and imported into the AnyBody Modeling
System and used for defining the muscle insertions and for visualization purposes. The
model contained two rigid bodies, the skull and the mandible. Mass and mass moments of
inertia of the mandible are based on the work of Koolstra and Van Eijden (2005) and are
listed in Table 4-5. In our model the number of muscles was 7 as shown in the Table 4-3

74
and their attachment points are taken from the physical skull and mandible of a human
subject. Motion capture of a human was performed as shown in above section, to
generate an input motion trajectory for the front incisor point. Given the input jaw motion
trajectory obtained from motion capture analysis of mandibular movement, inverse
dynamic analysis principle will be performed to determine the muscles forces and joint
reaction forces required to perform the desired motion of the front incisor point. The skull
and mandible make contact at both temporomandibular joints and at one bite point. The
origin is defined between the joints in the mid-sagittal plane. The positive x-axis is
pointing forward and the positive y-axis to the right and the positive z-axis is pointing
upward. Maximum muscle force of a muscle element is assumed to be proportional to its
physiological cross section under static circumstances where the value of P=0.37*106
N/m2. PCS of the temporalis, masseter, digastric, lateral and medical pterygoid muscle
was predicted from the cross sectional area of these muscles in the case of a dog, as
imaged on CT scans and also from dissection. For modeling human masticatory model,
all the architectural properties were used from Koolstra et al. For bulldog jaw model, the
architectural properties were estimated by performing dissection of the dog’s head
muscles. In order to get the STL file of the bulldog oriented and transformed to the origin
of the musculoskeletal system, we used Rhinoceros program. Here the mandible and skull
model were transformed to the origin of the program so that while importing these STL
files into AnyBody, the center of the two TMJ’s aline with the origin of the Anybody
Reference frame as shown in Figure 4-42 and Figure 4-43.
Figure 4-42:Transformation of Skull in Rhino Figure 4-43: Transformation of mandible
Kinematically the assumption was made that there is always contact between the condyle
and the mandibular fossa at both the TMJ, though in reality there is the articular disc in
between the condyles and hence the mandible has only four degrees of freedom left.
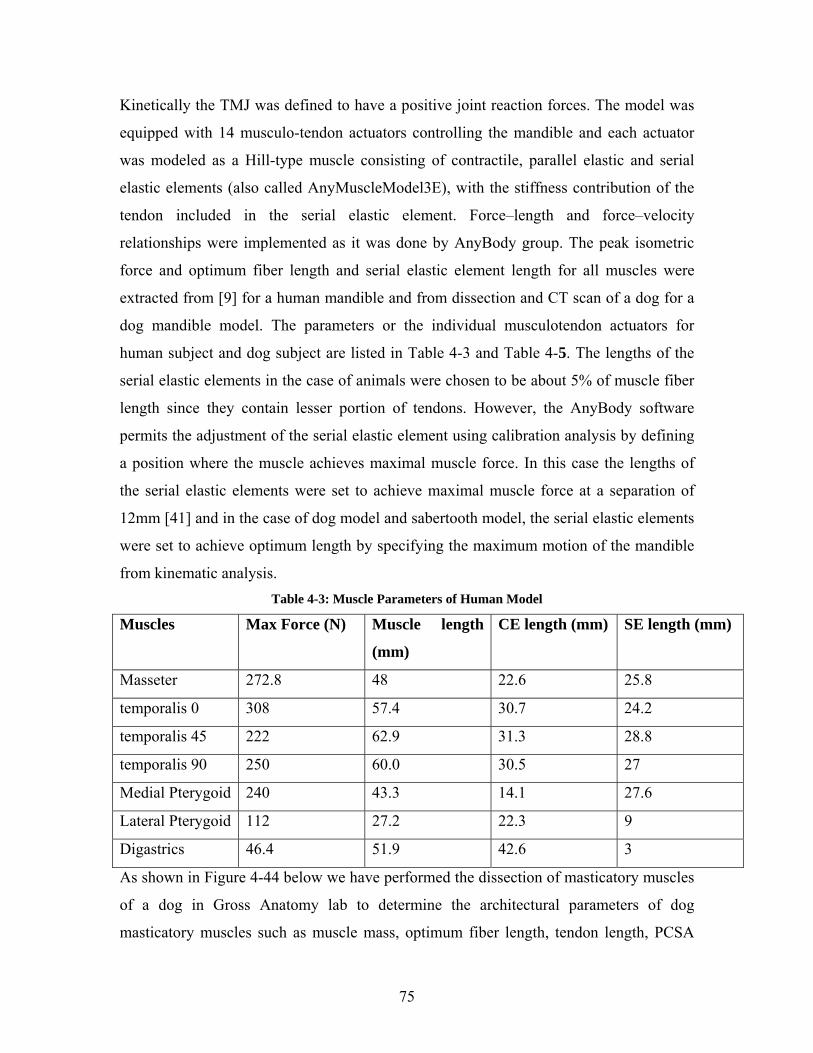
75
Kinetically the TMJ was defined to have a positive joint reaction forces. The model was
equipped with 14 musculo-tendon actuators controlling the mandible and each actuator
was modeled as a Hill-type muscle consisting of contractile, parallel elastic and serial
elastic elements (also called AnyMuscleModel3E), with the stiffness contribution of the
tendon included in the serial elastic element. Force–length and force–velocity
relationships were implemented as it was done by AnyBody group. The peak isometric
force and optimum fiber length and serial elastic element length for all muscles were
extracted from [9] for a human mandible and from dissection and CT scan of a dog for a
dog mandible model. The parameters or the individual musculotendon actuators for
human subject and dog subject are listed in Table 4-3 and Table 4-5. The lengths of the
serial elastic elements in the case of animals were chosen to be about 5% of muscle fiber
length since they contain lesser portion of tendons. However, the AnyBody software
permits the adjustment of the serial elastic element using calibration analysis by defining
a position where the muscle achieves maximal muscle force. In this case the lengths of
the serial elastic elements were set to achieve maximal muscle force at a separation of
12mm [41] and in the case of dog model and sabertooth model, the serial elastic elements
were set to achieve optimum length by specifying the maximum motion of the mandible
from kinematic analysis. Table 4-3: Muscle Parameters of Human Model
Muscles Max Force (N) Muscle length
(mm)
CE length (mm) SE length (mm)
Masseter 272.8 48 22.6 25.8
temporalis 0 308 57.4 30.7 24.2
temporalis 45 222 62.9 31.3 28.8
temporalis 90 250 60.0 30.5 27
Medial Pterygoid 240 43.3 14.1 27.6
Lateral Pterygoid 112 27.2 22.3 9
Digastrics 46.4 51.9 42.6 3
As shown in Figure 4-44 below we have performed the dissection of masticatory muscles
of a dog in Gross Anatomy lab to determine the architectural parameters of dog
masticatory muscles such as muscle mass, optimum fiber length, tendon length, PCSA
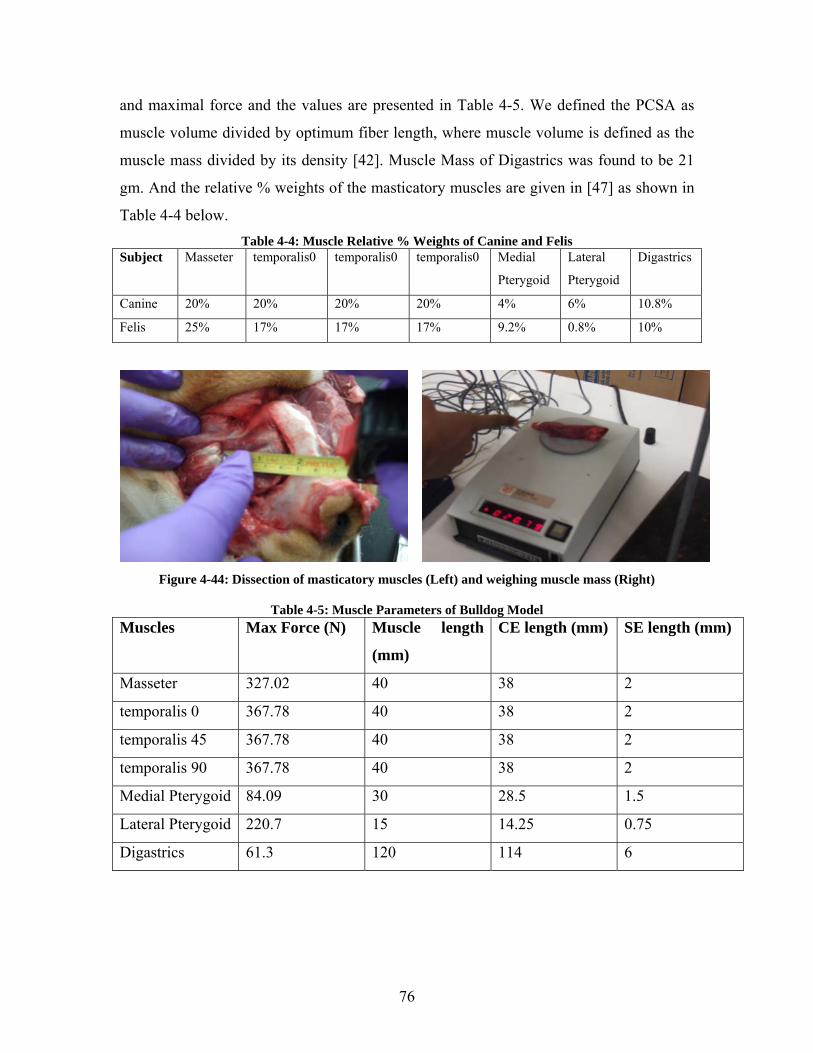
76
and maximal force and the values are presented in Table 4-5. We defined the PCSA as
muscle volume divided by optimum fiber length, where muscle volume is defined as the
muscle mass divided by its density [42]. Muscle Mass of Digastrics was found to be 21
gm. And the relative % weights of the masticatory muscles are given in [47] as shown in
Table 4-4 below. Table 4-4: Muscle Relative % Weights of Canine and Felis
Subject Masseter temporalis0 temporalis0 temporalis0 Medial
Pterygoid
Lateral
Pterygoid
Digastrics
Canine 20% 20% 20% 20% 4% 6% 10.8%
Felis 25% 17% 17% 17% 9.2% 0.8% 10%
Figure 4-44: Dissection of masticatory muscles (Left) and weighing muscle mass (Right)
Table 4-5: Muscle Parameters of Bulldog Model Muscles Max Force (N) Muscle length
(mm)
CE length (mm) SE length (mm)
Masseter 327.02 40 38 2
temporalis 0 367.78 40 38 2
temporalis 45 367.78 40 38 2
temporalis 90 367.78 40 38 2
Medial Pterygoid 84.09 30 28.5 1.5
Lateral Pterygoid 220.7 15 14.25 0.75
Digastrics 61.3 120 114 6
77
Table 4-6: Muscle Parameters of Sabertooth Model Muscles Max Force (N) Muscle length
(mm)
CE length (mm) SE length (mm)
Masseter 1751.89 60 54 6
temporalis 0 661.82 90 81 9
temporalis 45 661.82 90 81 9
temporalis 90 661.82 90 81 9
Medial Pterygoid 475.5 70 63 7
Lateral Pterygoid 58.39 30 27 3
Digastrics 134.76 250 225 25
Figure 4-45: Skull and Mandible model of Bulldog
Table 4-7: Mass and Inertia of Mandible
Model Mass (kg) Ixx (kg m2) Iyy (kg m2) Izz (kg m2)
Mandible 0.44 0.00086 0.00029 0.00061
Figure 4-46: Human Jaw model in AnyBody

78
Figure 4-47: Human Skull and Mandible model in different views
Figures 4-48-4-50 below shows the musculoskeletal model of a sabertooth cat which has
been modeled with the motion capture data of a sabertooth Jaw simulator, muscles
architectural properties measured from its CT scan and the mass and inertia properties of
the mandible were scaled up accordingly for both sabertooth and bulldog. Rest of the
modeling procedure of the TMJ and mandible are same as above mentioned human
model. Similar model was created for a bulldog and its muscle architectural properties
were extracted from dog’s dissection and CT scan. Considering all the muscles to be
acting like a vector along a straight line, Figure 4-52 below shows the muscle origin
points on the skull and the muscles insertion points on the mandible. Y-co-ordinate of the
attachment point changes sign for all the muscles on the Left side.
Vectors in pick color shows the masticatory muscles required to generate force for
producing the jaw closing and opening action. All the muscle attachment points were
defined with the origin as center of two TMJ joints. Since we know that both the skull
and mandible together have 12 degrees of freedom, it is essential to provide 12
constraints/ drivers to setup a kinematically determinate system. In this case the skull is
79
fixed rigidly to the global reference frame and hence locking six degrees of freedom.
Two degrees of freedom are constrained by having the condyles in contact with the fossa
at both the temporomandibular joints by constraining condyles in Z direction. Also the
sideways movement of the condyle is set to be zero by constraining Left TMJ in Y
direction. The remaining three constraints are used to drive the model using marker
trajectory at the frontal incisor along the three translational axes. The marker trajectory of
the frontal incisor point was obtained from SIMI motion capture system.
Figure 4-48: Sabertooth Cat Model
Figure 4-49: Mandible model in top view
Figure 4-50: Mandible model in front view
Data manipulation was done in Matlab by averaging the co-ordinates of the RightTMJ
point and LeftTMJ point and subtracting from the co-ordinates of front incisor point in
80
order to ensure that the X, Y and Z co-ordinate of the marker point is w.r.t. to the origin
of the AnyBody model. Figures 4-51 and 4-53 below show the script for creating the
joints and drivers respectively.
Figure 4-51: Script for Specifying the Joints
Figure 4-52: Muscle Attachment Points for bulldog skull and mandible
81
Figure 4-53: Script for Specifying the Drivers and Motion Capture data
All the architectural muscle properties for human model were taken from Koolstra and
from dissection of a dog head for bulldog model. The script for defining the muscle
models and their parameters for a bulldog jaw model is shown below in Figure 4-54 and
Figure 4-55. AnyViaPoint muscle indicates that the muscle has been modeled as a vector
with origin and insertion point. AnyMuscleModel3E indicates muscles have been
modeled as Hill Muscle model with force-length and force-velocity relationships. We
have also modeled muscles as a simple muscle model with just the maximum force as the
input for comparative and parametric study.
Figure 4-54: Script for Specifying Muscle Models
82
Figure 4-55: Script for Specifying the Muscle Parameters
4.6 CAD Model of Stewart platform Type 6 DOF Parallel Manipulator
A CAD model of Stewart platform type 6 DOF parallel manipulator was created in
SolidWorks. The system parameters such as ball joint locations, dimension of the moving
platform, fixed platform and legs were designed parametrically. The size of the actuators
in terms of the length and diameter of the linear prismatic actuator were determined from
the specifications of Linmot linear motor.
Figure 4-56: Linmot Linear Motors
These Linmot actuators (see Figure 4-56) are available in 15 different motor
configurations with peak forces of from 33 to 580 N (7-130 lbs). A total of over 300
standard motor specifications with strokes lengths of up to 1500 mm (5 feet) are
available. But for reproducing the jaw motion of vertebrates, stroke of up to 50mm in the
vertical direction and an actuator force of about 200-300N was sufficient. Hence we
chose an actuator of length 200mm and diameter of 5mm which can produce an actuator
force of about 200N.
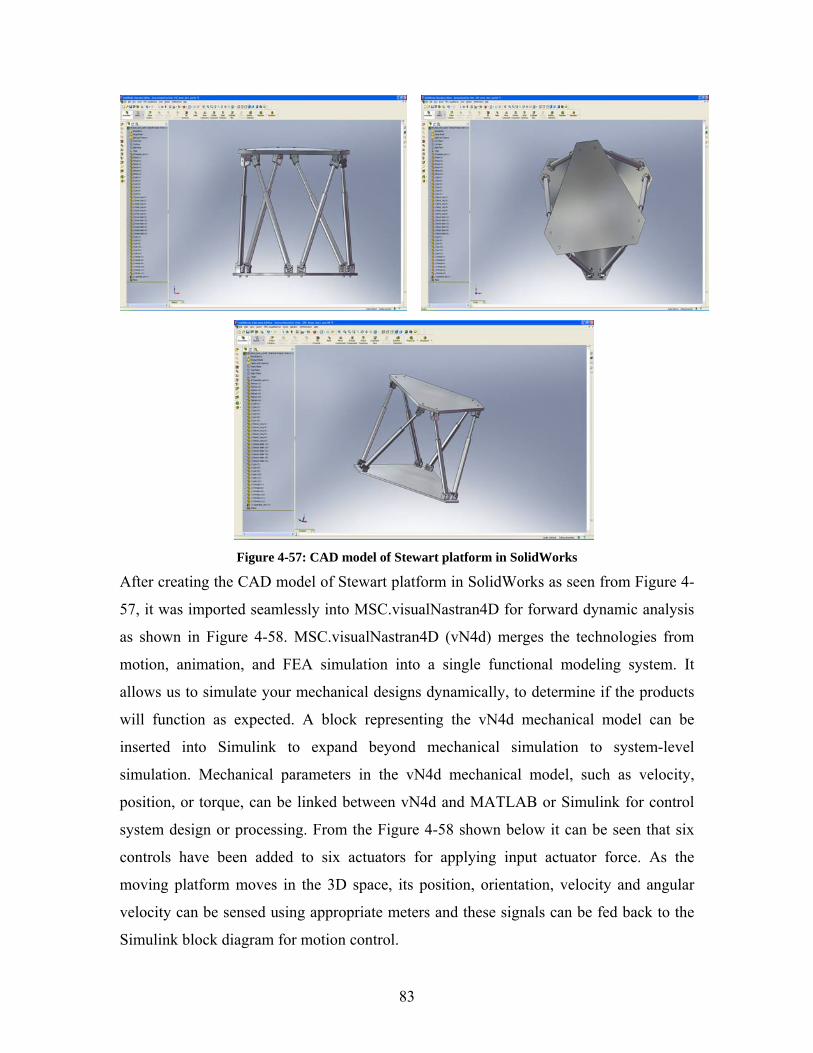
83
Figure 4-57: CAD model of Stewart platform in SolidWorks
After creating the CAD model of Stewart platform in SolidWorks as seen from Figure 4-
57, it was imported seamlessly into MSC.visualNastran4D for forward dynamic analysis
as shown in Figure 4-58. MSC.visualNastran4D (vN4d) merges the technologies from
motion, animation, and FEA simulation into a single functional modeling system. It
allows us to simulate your mechanical designs dynamically, to determine if the products
will function as expected. A block representing the vN4d mechanical model can be
inserted into Simulink to expand beyond mechanical simulation to system-level
simulation. Mechanical parameters in the vN4d mechanical model, such as velocity,
position, or torque, can be linked between vN4d and MATLAB or Simulink for control
system design or processing. From the Figure 4-58 shown below it can be seen that six
controls have been added to six actuators for applying input actuator force. As the
moving platform moves in the 3D space, its position, orientation, velocity and angular
velocity can be sensed using appropriate meters and these signals can be fed back to the
Simulink block diagram for motion control.
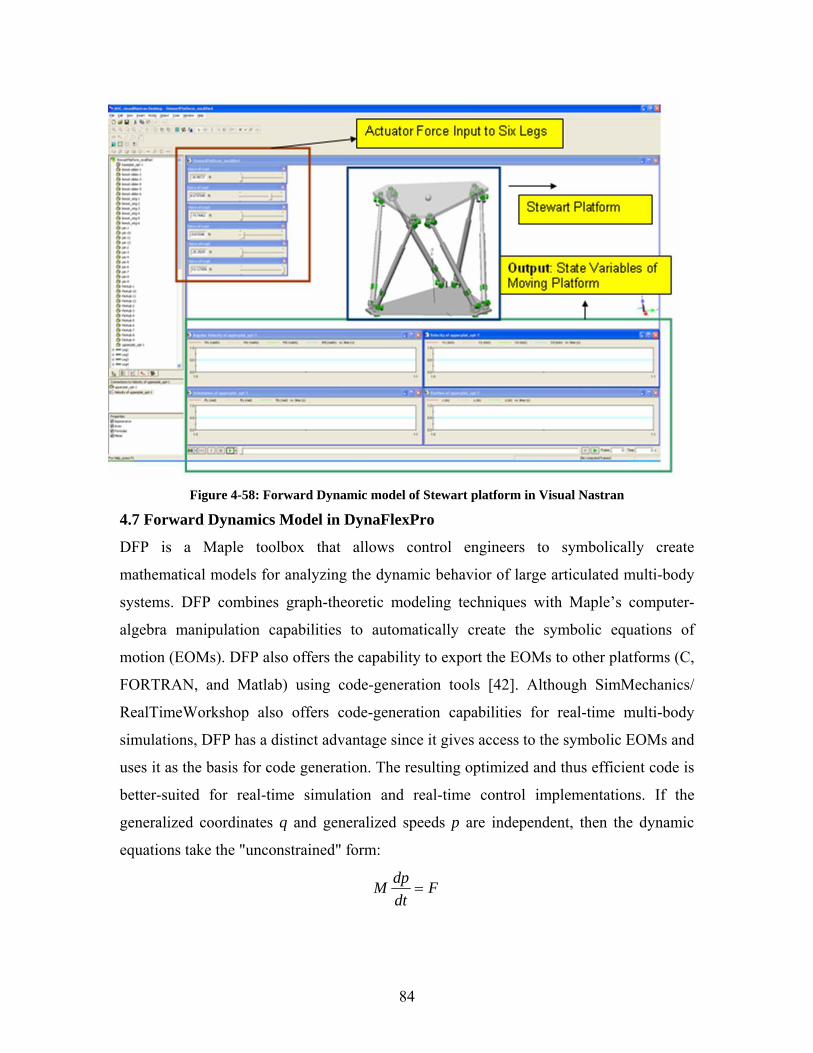
84
Figure 4-58: Forward Dynamic model of Stewart platform in Visual Nastran
4.7 Forward Dynamics Model in DynaFlexPro
DFP is a Maple toolbox that allows control engineers to symbolically create
mathematical models for analyzing the dynamic behavior of large articulated multi-body
systems. DFP combines graph-theoretic modeling techniques with Maple’s computer-
algebra manipulation capabilities to automatically create the symbolic equations of
motion (EOMs). DFP also offers the capability to export the EOMs to other platforms (C,
FORTRAN, and Matlab) using code-generation tools [42]. Although SimMechanics/
RealTimeWorkshop also offers code-generation capabilities for real-time multi-body
simulations, DFP has a distinct advantage since it gives access to the symbolic EOMs and
uses it as the basis for code generation. The resulting optimized and thus efficient code is
better-suited for real-time simulation and real-time control implementations. If the
generalized coordinates q and generalized speeds p are independent, then the dynamic
equations take the "unconstrained" form:
FdtdpM =

85
Where M is the mass matrix and F contains external loads and quadratic velocity terms.
The full set of system equations are formed by combining these dynamic equations with
the kinematic transformations, giving 2n ordinary differential equations in 2n unknowns:
⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡hF
dtdqdtdp
M100
If the generalized coordinates q and generalized speeds p are dependent, then the
"augmented" dynamic equations can be written with the constraint reactions appearing
explicitly ("AugType" option set to "Reaction"):
FfCdtdpM T =+
where f contains the reaction loads in the cotree joints that enforce the kinematic
constraints, and C is the corresponding coefficient matrix [48].
With DynaFlexPro, one can represent the constraint reactions by their actual forces and
moments, or indirectly using Lagrange multipliers. One popular method for converting
these DAEs to ODEs is to replace the position constraints with the acceleration
constraints, which are then numerically integrated simultaneously with the ODEs from
the dynamic equations. In the integration process, though, the accumulation of numerical
errors will lead to violations in the position constraint equations (visually, the
cotree joints will float apart). Baumgarte proposed a method to stabilize these
constraints, by combining the position, velocity, and acceleration constraints into a single
expression:
02 2 =++∂ φβαψ
which can be written as a linear equation in terms of the accelerations:
ε
φβαψψ
=
−−= 22edtdp
p
By integrating this expression for the accelerations, the Baumgarte parameters α and β
will act to stabilize the constraints at the position level [48].
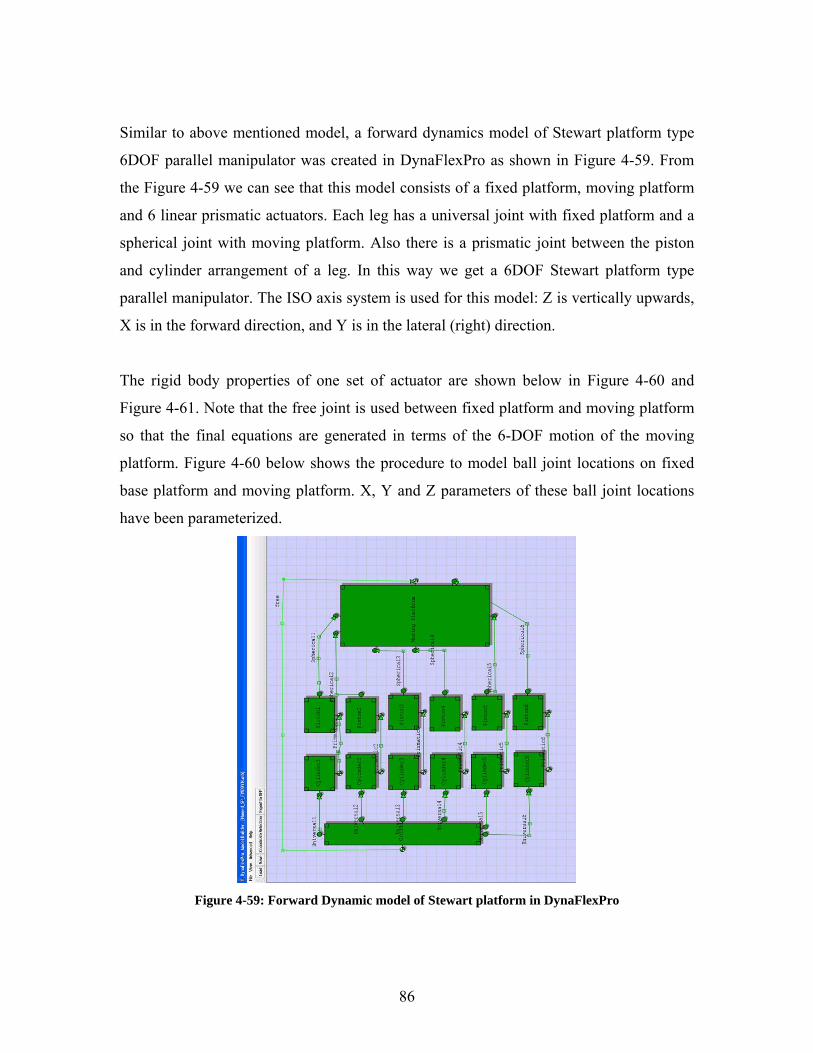
86
Similar to above mentioned model, a forward dynamics model of Stewart platform type
6DOF parallel manipulator was created in DynaFlexPro as shown in Figure 4-59. From
the Figure 4-59 we can see that this model consists of a fixed platform, moving platform
and 6 linear prismatic actuators. Each leg has a universal joint with fixed platform and a
spherical joint with moving platform. Also there is a prismatic joint between the piston
and cylinder arrangement of a leg. In this way we get a 6DOF Stewart platform type
parallel manipulator. The ISO axis system is used for this model: Z is vertically upwards,
X is in the forward direction, and Y is in the lateral (right) direction.
The rigid body properties of one set of actuator are shown below in Figure 4-60 and
Figure 4-61. Note that the free joint is used between fixed platform and moving platform
so that the final equations are generated in terms of the 6-DOF motion of the moving
platform. Figure 4-60 below shows the procedure to model ball joint locations on fixed
base platform and moving platform. X, Y and Z parameters of these ball joint locations
have been parameterized.
Figure 4-59: Forward Dynamic model of Stewart platform in DynaFlexPro
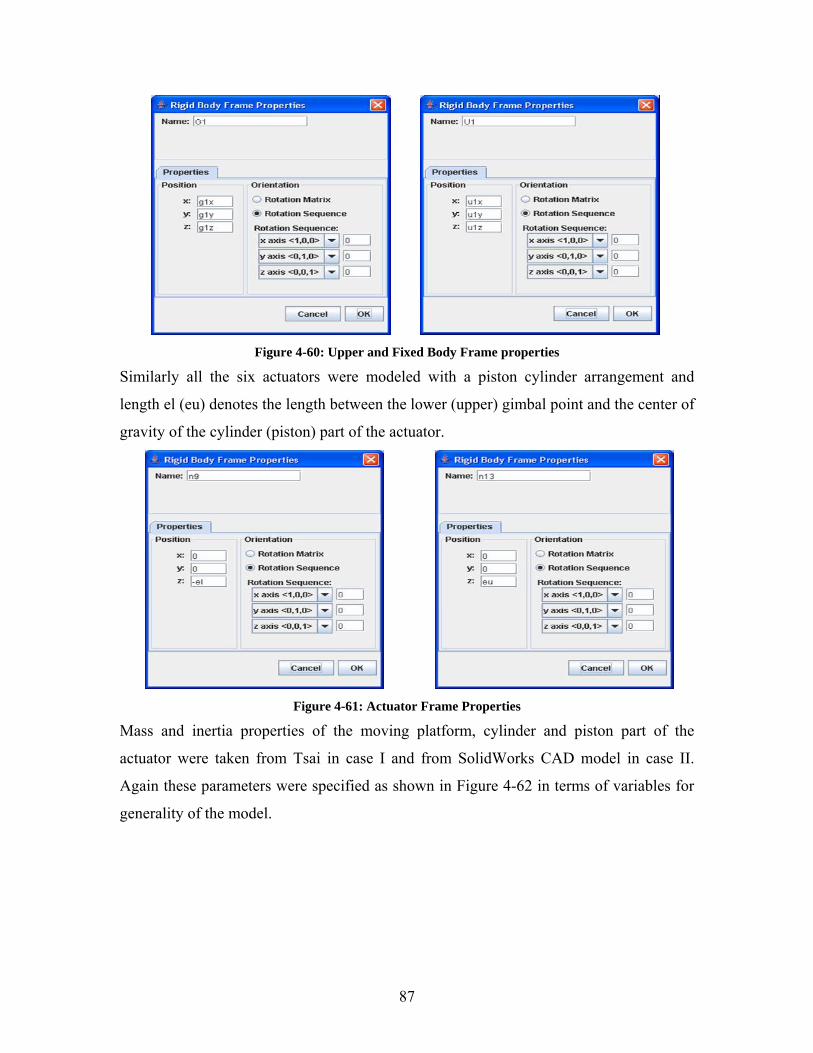
87
Figure 4-60: Upper and Fixed Body Frame properties
Similarly all the six actuators were modeled with a piston cylinder arrangement and
length el (eu) denotes the length between the lower (upper) gimbal point and the center of
gravity of the cylinder (piston) part of the actuator.
Figure 4-61: Actuator Frame Properties
Mass and inertia properties of the moving platform, cylinder and piston part of the
actuator were taken from Tsai in case I and from SolidWorks CAD model in case II.
Again these parameters were specified as shown in Figure 4-62 in terms of variables for
generality of the model.
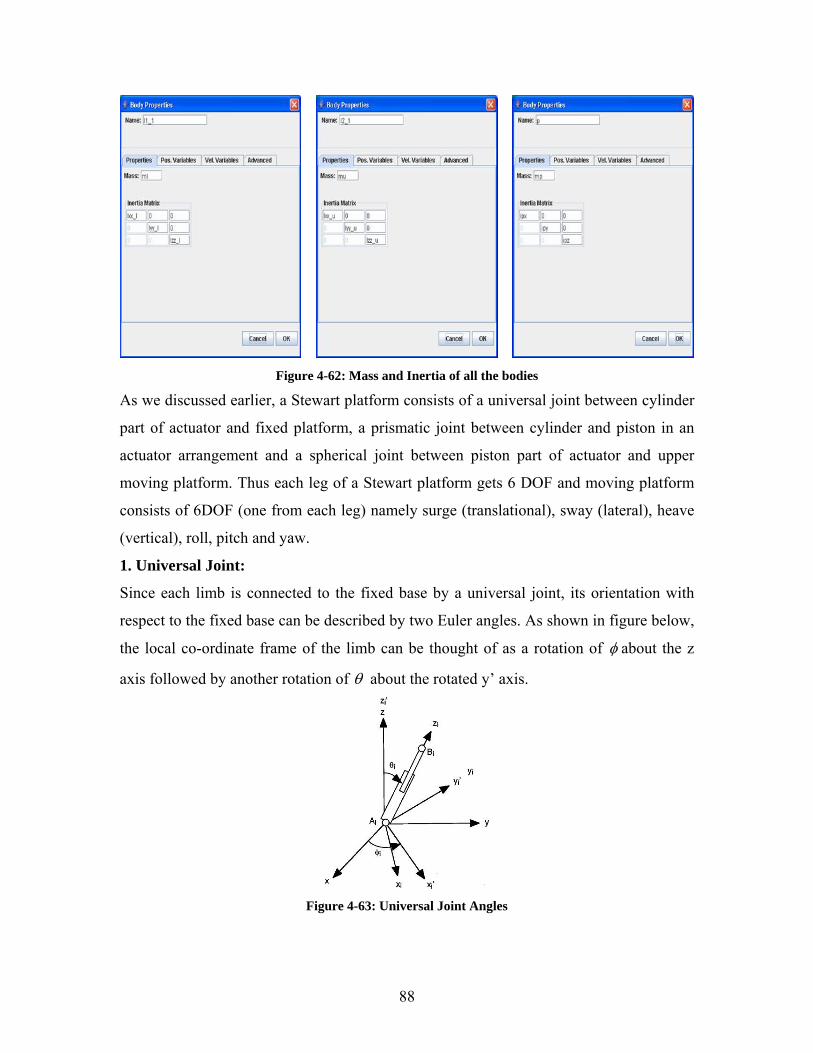
88
Figure 4-62: Mass and Inertia of all the bodies
As we discussed earlier, a Stewart platform consists of a universal joint between cylinder
part of actuator and fixed platform, a prismatic joint between cylinder and piston in an
actuator arrangement and a spherical joint between piston part of actuator and upper
moving platform. Thus each leg of a Stewart platform gets 6 DOF and moving platform
consists of 6DOF (one from each leg) namely surge (translational), sway (lateral), heave
(vertical), roll, pitch and yaw.
1. Universal Joint:
Since each limb is connected to the fixed base by a universal joint, its orientation with
respect to the fixed base can be described by two Euler angles. As shown in figure below,
the local co-ordinate frame of the limb can be thought of as a rotation of φ about the z
axis followed by another rotation of θ about the rotated y’ axis.
Figure 4-63: Universal Joint Angles
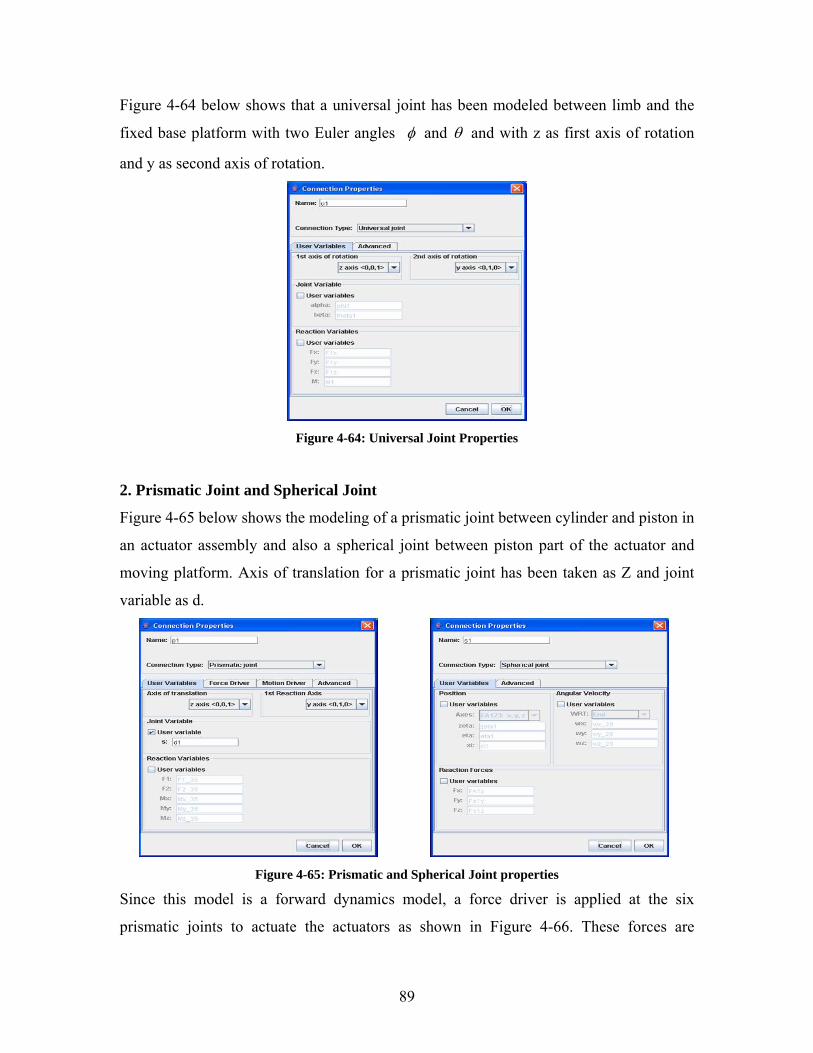
89
Figure 4-64 below shows that a universal joint has been modeled between limb and the
fixed base platform with two Euler angles φ and θ and with z as first axis of rotation
and y as second axis of rotation.
Figure 4-64: Universal Joint Properties
2. Prismatic Joint and Spherical Joint
Figure 4-65 below shows the modeling of a prismatic joint between cylinder and piston in
an actuator assembly and also a spherical joint between piston part of the actuator and
moving platform. Axis of translation for a prismatic joint has been taken as Z and joint
variable as d.
Figure 4-65: Prismatic and Spherical Joint properties
Since this model is a forward dynamics model, a force driver is applied at the six
prismatic joints to actuate the actuators as shown in Figure 4-66. These forces are

90
function of time and are computed using the inverse dynamics principle of a Stewart
platform type parallel manipulator.
Figure 4-66: Force Driver for Actuators
Since we need the dynamic equations of motion of this system to be in terms of the
position and orientation of moving platform, a free joint has been added between the
center of gravity of fixed platform and center of gravity of moving platform as seen in
Figure 4-67. System co-ordinates consist of 24 parameters such as position and
orientation of the moving platform, one joint variables of each prismatic joint and two
joint variables of each universal joint and their derivatives w.r.t. time.
Figure 4-67: Free joint and Co-ordinate Selection properties
Once the system has been modeled we can then proceed to generate the dynamic equation
of motion of this 6DOF Stewart platform type parallel manipulator. The process of
generating equations of motion and a Simulink block diagram has been shown below in a
methodical manner.
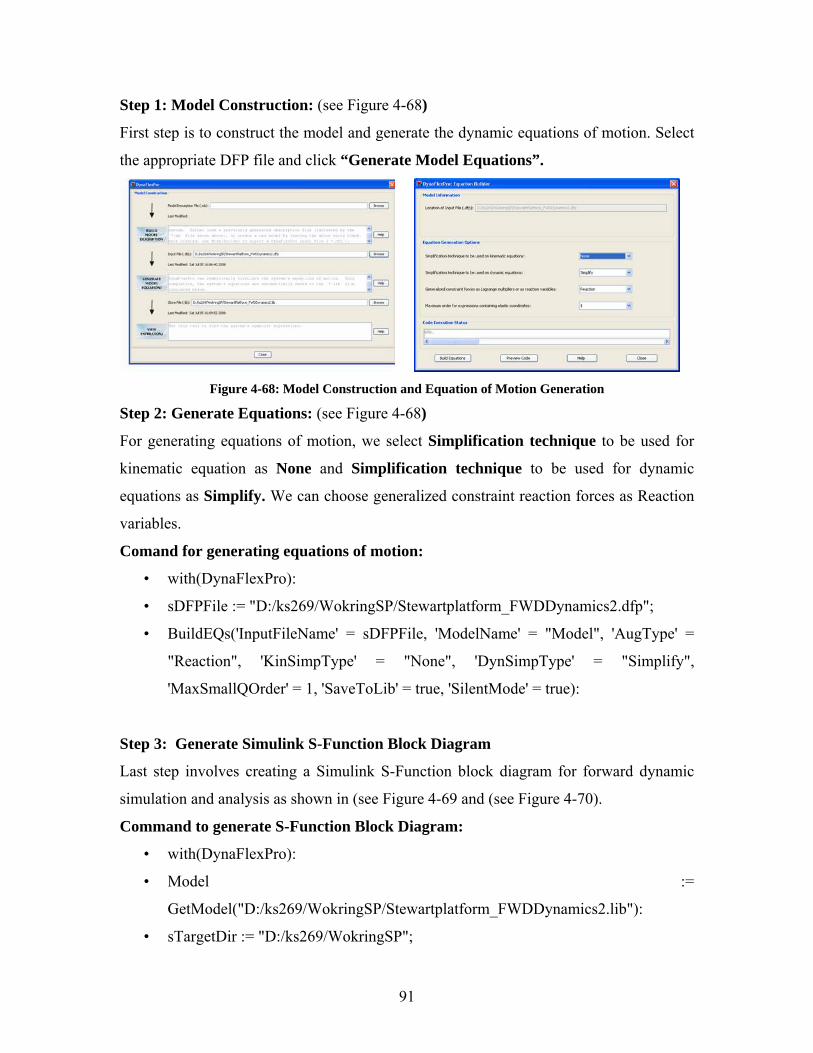
91
Step 1: Model Construction: (see Figure 4-68)
First step is to construct the model and generate the dynamic equations of motion. Select
the appropriate DFP file and click “Generate Model Equations”.
Figure 4-68: Model Construction and Equation of Motion Generation
Step 2: Generate Equations: (see Figure 4-68)
For generating equations of motion, we select Simplification technique to be used for
kinematic equation as None and Simplification technique to be used for dynamic
equations as Simplify. We can choose generalized constraint reaction forces as Reaction
variables.
Comand for generating equations of motion:
• with(DynaFlexPro):
• sDFPFile := "D:/ks269/WokringSP/Stewartplatform_FWDDynamics2.dfp";
• BuildEQs('InputFileName' = sDFPFile, 'ModelName' = "Model", 'AugType' =
"Reaction", 'KinSimpType' = "None", 'DynSimpType' = "Simplify",
'MaxSmallQOrder' = 1, 'SaveToLib' = true, 'SilentMode' = true):
Step 3: Generate Simulink S-Function Block Diagram
Last step involves creating a Simulink S-Function block diagram for forward dynamic
simulation and analysis as shown in (see Figure 4-69 and (see Figure 4-70).
Command to generate S-Function Block Diagram:
• with(DynaFlexPro):
• Model :=
GetModel("D:/ks269/WokringSP/Stewartplatform_FWDDynamics2.lib"):
• sTargetDir := "D:/ks269/WokringSP";
92
• StateVariables := Model:-vX:
• lleFuncs := [["StateVariables", StateVariables]]:
• leNumericSubs := [];
• leICs := [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0];
• leBaumgarte := [10,10];
• BuildSimCode(Model, 'TargetDir' = sTargetDir, 'Exports'={lleFuncs},
'Language'="BB_SFunction_WithIntegrator", 'Optimize'=true, 'ICs'=leICs,
'Baumgarte'=leBaumgarte, 'NumericSubs'=leNumericSubs, 'SilentMode' = true):
Figure 4-69: Simulink Block
Generation
Figure 4-70: Simulink Block
Diagram to find state variables
In a forward dynamic simulation, given the actuator forces we compute the position
and orientation of the moving platform, function that is generated in this case is State
Variables. In our case we have used the output types “Xdot”: computes the first time
derivatives of state variables, i.e. dP/dt and dQ/dt. “BB_SFunction_WithIntegrator”:
creates a special BlockBuilder object in the Maple workspace. In a very similar way
we will also create a code for AugType “Reaction” to formulate a simulation code for
our defined reaction variables. The resulting Simulink block will contain internal
states (vX) and an integrator that will advance the state variables in time. In addition
to the “Parameters” and “Inputs” input ports, this block will also have an “ic” input
port for the initial conditions of the state variables. Thus the only output type that is
compatible with “BB_SFunction_WithIntegrator” is “Xdot”. We can compute the
initial conditions in Matlab by performing Inverse Kinematics of the Stewart platform
model and specify all the inputs and parameters to compute the state variables.

93
5. Simulation & Results 5.1 Inverse Dynamic Analysis of Human Jaw Model in Anybody Modeling System
After extracting the trajectory of the front incisor point on the mandible, it was given as
the input motion to the musculoskeletal model of vertebrate jaw in AnyBody tool to
compute the muscle forces and TMJ reaction forces. Overall, three models were studied
namely human jaw, sabertooth jaw and bulldog jaw and the muscle forces and reaction
forces were determined for each of the models. In each case, parametric analysis was
performed by varying muscle models, arrangement of temporalis muscle. Also in one
case temporalis muscle was modeled as one vector at 0 degree angle and in the other case
as three independent vectors at 0, 45 and 90 degree angle respectively. Due to lack of
equipments for real time measurements of chewing force, the chewing force was
simulated with the maximal force at minimal gape and minimal force at maximum gape.
As shown in Figure 5-1 each of the jaw models was studied by varying the type of
muscle model and number of temporalis muscle vectors. Simple muscle model does not
consider the force-length and force-velocity relationship and passive stiffness of the
muscle, whereas the complex muscle model is same as a Hill Muscle model which
considers muscle parameters such as fiber length, tendon length, pennation angle and
passive stiffness. Also since the temporalis muscles form a huge cluster; it is difficult to
determine origin and insertion point of one vector. Hence we have modeled temporalis
muscle as one vector in one case and as three vectors in other case.
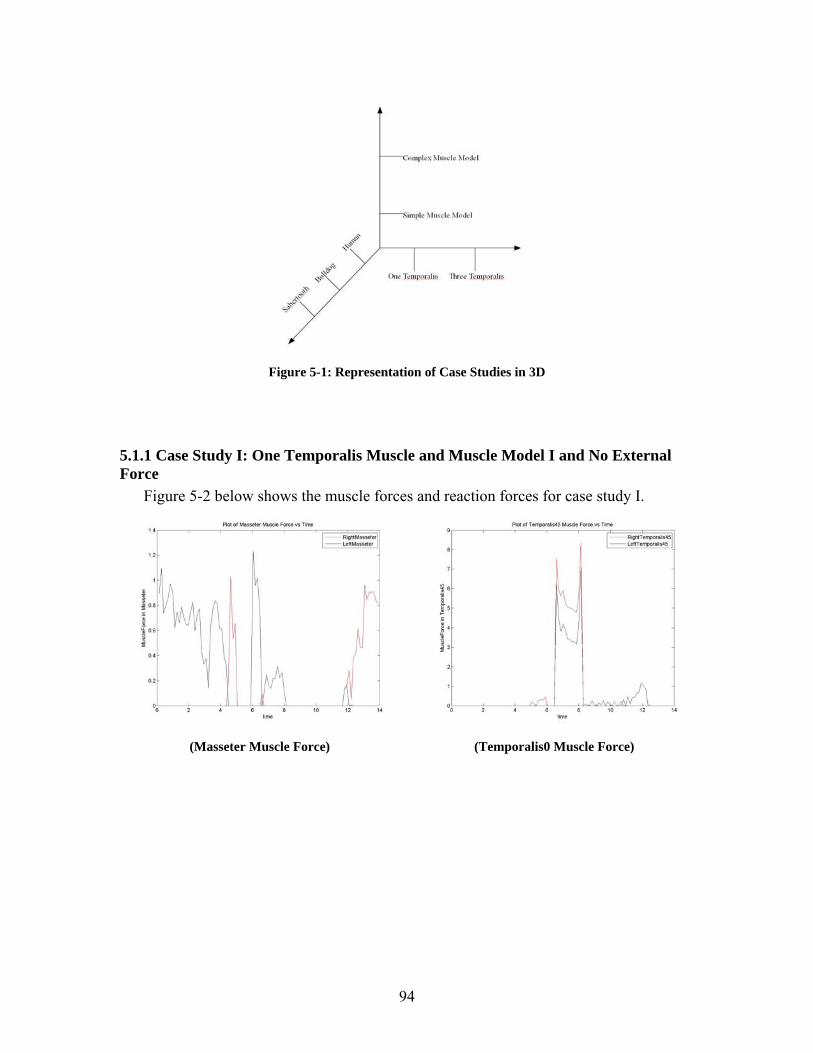
94
Figure 5-1: Representation of Case Studies in 3D
5.1.1 Case Study I: One Temporalis Muscle and Muscle Model I and No External Force
Figure 5-2 below shows the muscle forces and reaction forces for case study I.
(Masseter Muscle Force) (Temporalis0 Muscle Force)
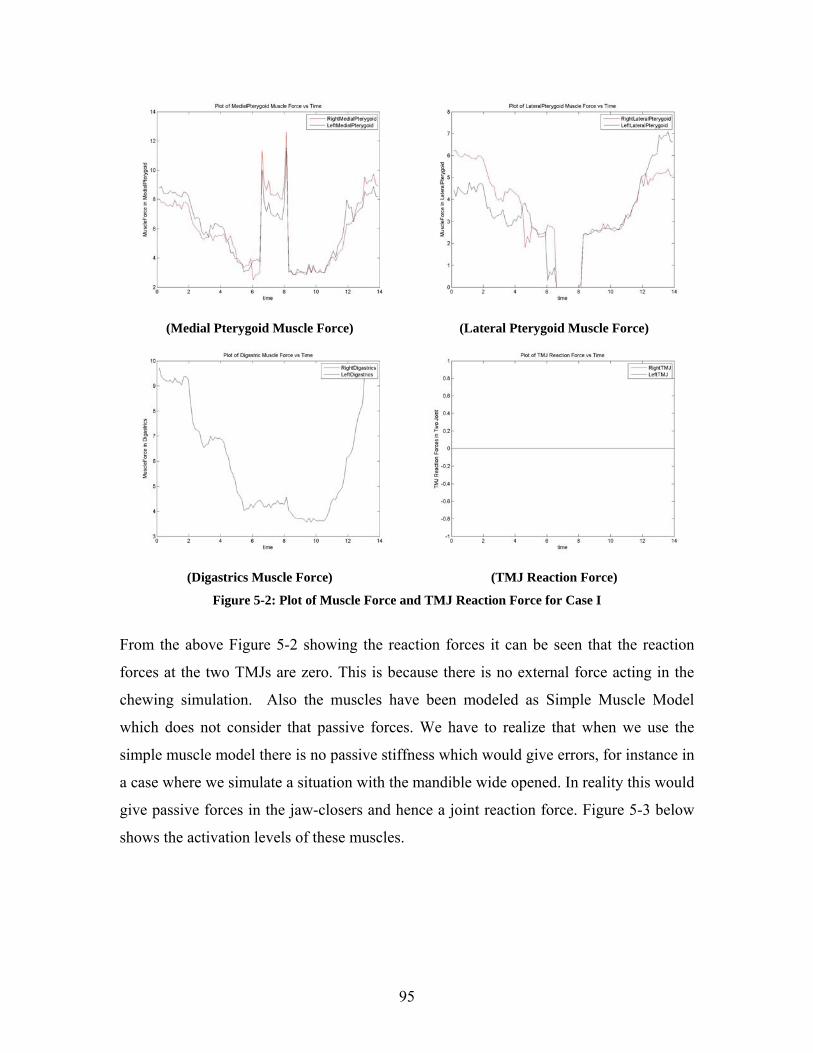
95
(Medial Pterygoid Muscle Force) (Lateral Pterygoid Muscle Force)
(Digastrics Muscle Force) (TMJ Reaction Force)
Figure 5-2: Plot of Muscle Force and TMJ Reaction Force for Case I
From the above Figure 5-2 showing the reaction forces it can be seen that the reaction
forces at the two TMJs are zero. This is because there is no external force acting in the
chewing simulation. Also the muscles have been modeled as Simple Muscle Model
which does not consider that passive forces. We have to realize that when we use the
simple muscle model there is no passive stiffness which would give errors, for instance in
a case where we simulate a situation with the mandible wide opened. In reality this would
give passive forces in the jaw-closers and hence a joint reaction force. Figure 5-3 below
shows the activation levels of these muscles.
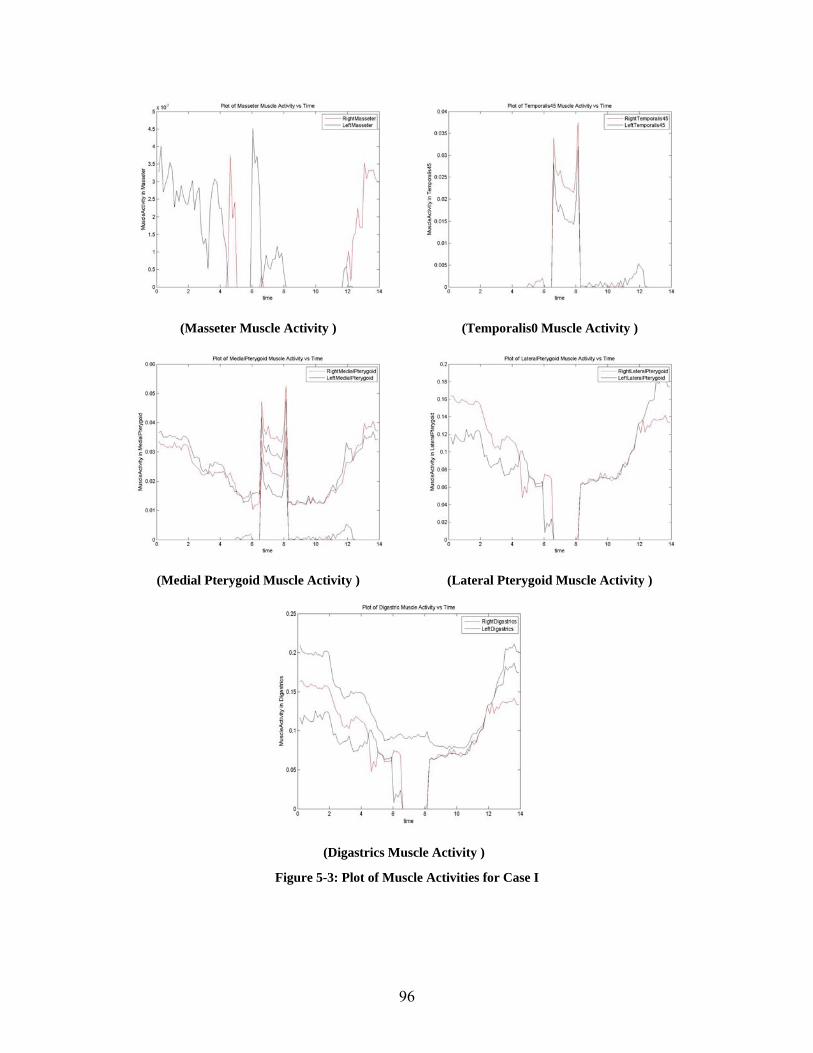
96
(Masseter Muscle Activity ) (Temporalis0 Muscle Activity )
(Medial Pterygoid Muscle Activity ) (Lateral Pterygoid Muscle Activity )
(Digastrics Muscle Activity )
Figure 5-3: Plot of Muscle Activities for Case I
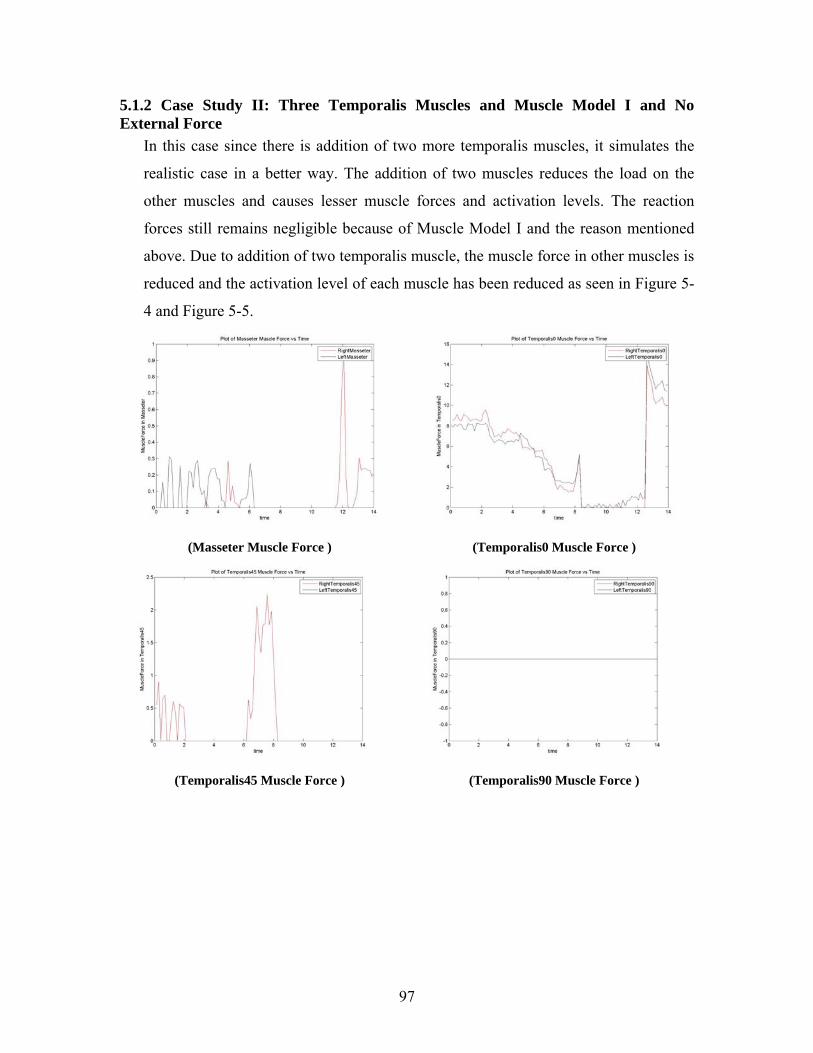
97
5.1.2 Case Study II: Three Temporalis Muscles and Muscle Model I and No External Force
In this case since there is addition of two more temporalis muscles, it simulates the
realistic case in a better way. The addition of two muscles reduces the load on the
other muscles and causes lesser muscle forces and activation levels. The reaction
forces still remains negligible because of Muscle Model I and the reason mentioned
above. Due to addition of two temporalis muscle, the muscle force in other muscles is
reduced and the activation level of each muscle has been reduced as seen in Figure 5-
4 and Figure 5-5.
(Masseter Muscle Force ) (Temporalis0 Muscle Force )
(Temporalis45 Muscle Force ) (Temporalis90 Muscle Force )
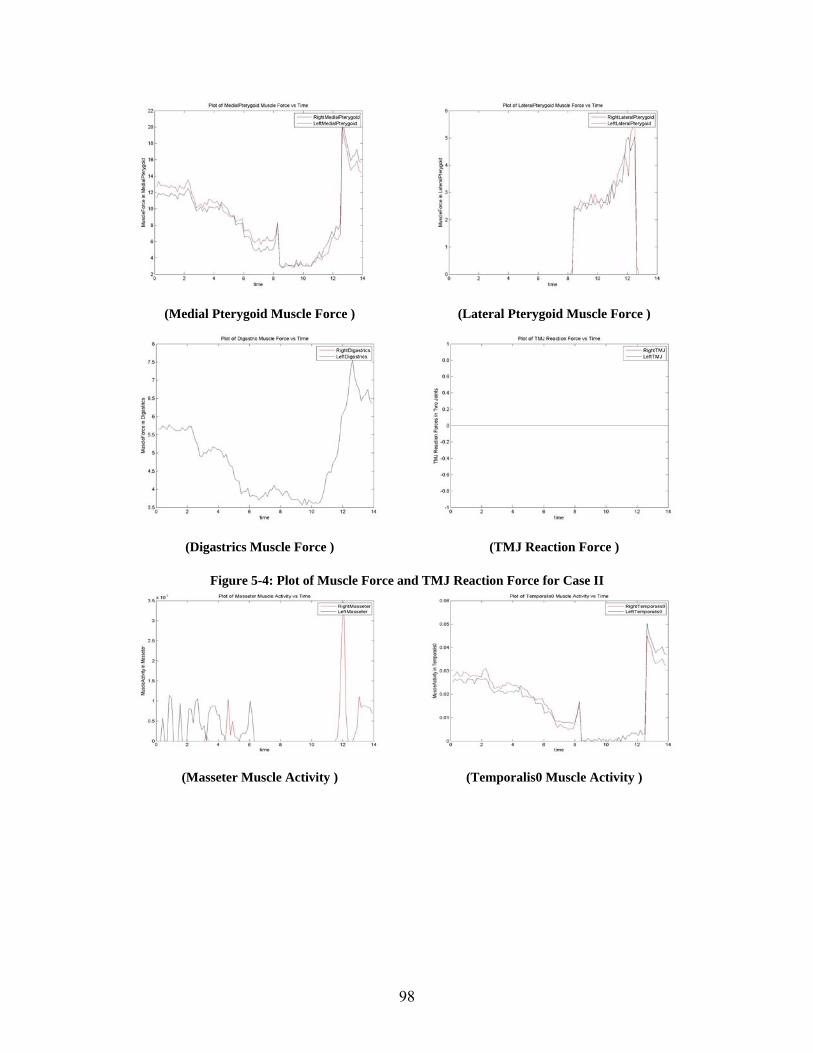
98
(Medial Pterygoid Muscle Force ) (Lateral Pterygoid Muscle Force )
(Digastrics Muscle Force ) (TMJ Reaction Force )
Figure 5-4: Plot of Muscle Force and TMJ Reaction Force for Case II
(Masseter Muscle Activity ) (Temporalis0 Muscle Activity )
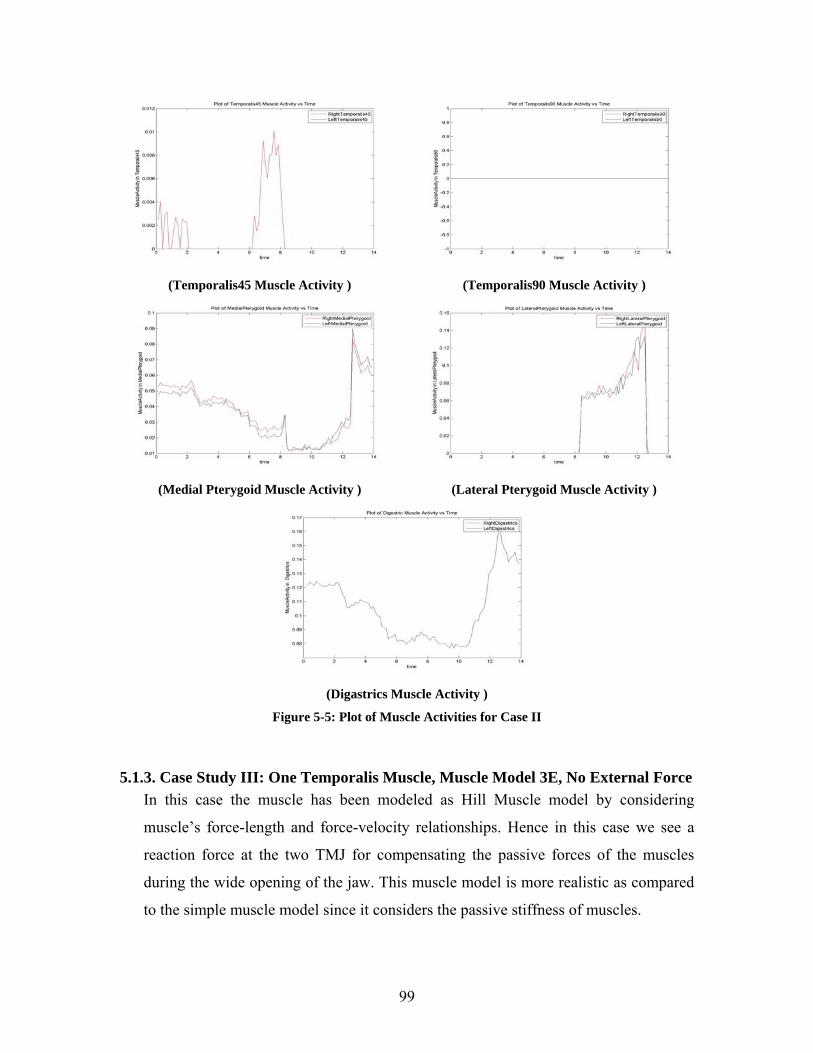
99
(Temporalis45 Muscle Activity ) (Temporalis90 Muscle Activity )
(Medial Pterygoid Muscle Activity ) (Lateral Pterygoid Muscle Activity )
(Digastrics Muscle Activity )
Figure 5-5: Plot of Muscle Activities for Case II
5.1.3. Case Study III: One Temporalis Muscle, Muscle Model 3E, No External Force In this case the muscle has been modeled as Hill Muscle model by considering
muscle’s force-length and force-velocity relationships. Hence in this case we see a
reaction force at the two TMJ for compensating the passive forces of the muscles
during the wide opening of the jaw. This muscle model is more realistic as compared
to the simple muscle model since it considers the passive stiffness of muscles.
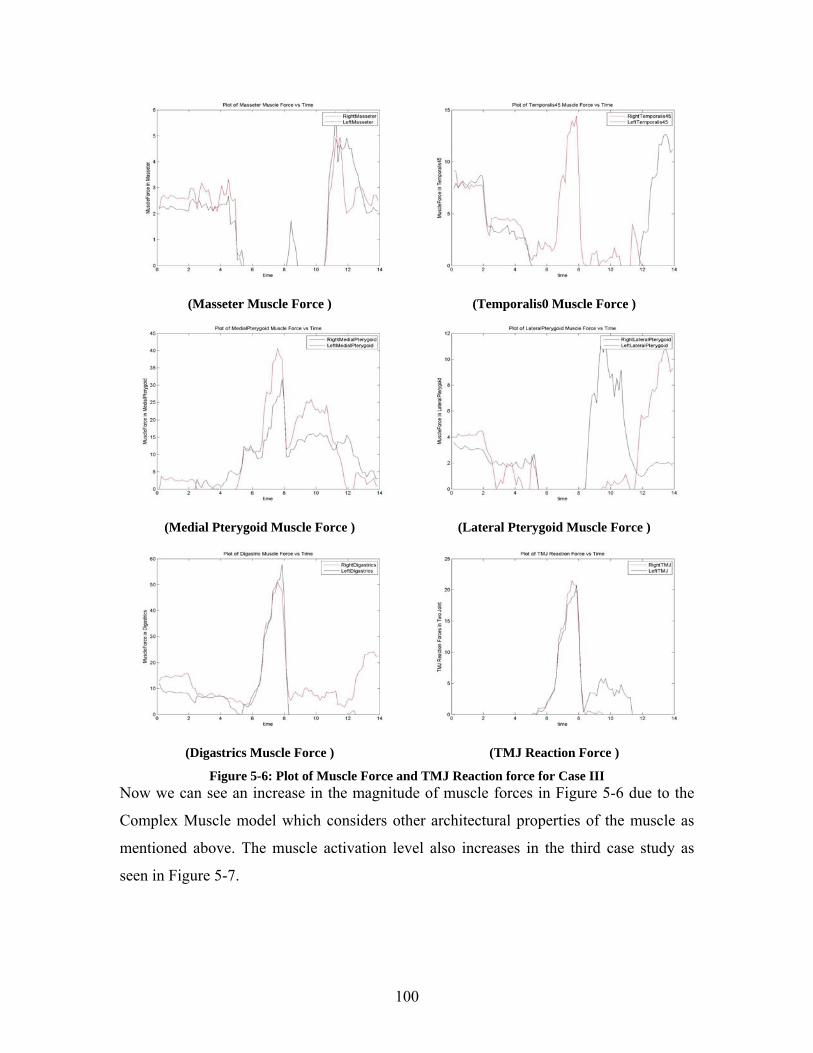
100
(Masseter Muscle Force ) (Temporalis0 Muscle Force )
(Medial Pterygoid Muscle Force ) (Lateral Pterygoid Muscle Force )
(Digastrics Muscle Force ) (TMJ Reaction Force )
Figure 5-6: Plot of Muscle Force and TMJ Reaction force for Case III Now we can see an increase in the magnitude of muscle forces in Figure 5-6 due to the
Complex Muscle model which considers other architectural properties of the muscle as
mentioned above. The muscle activation level also increases in the third case study as
seen in Figure 5-7.
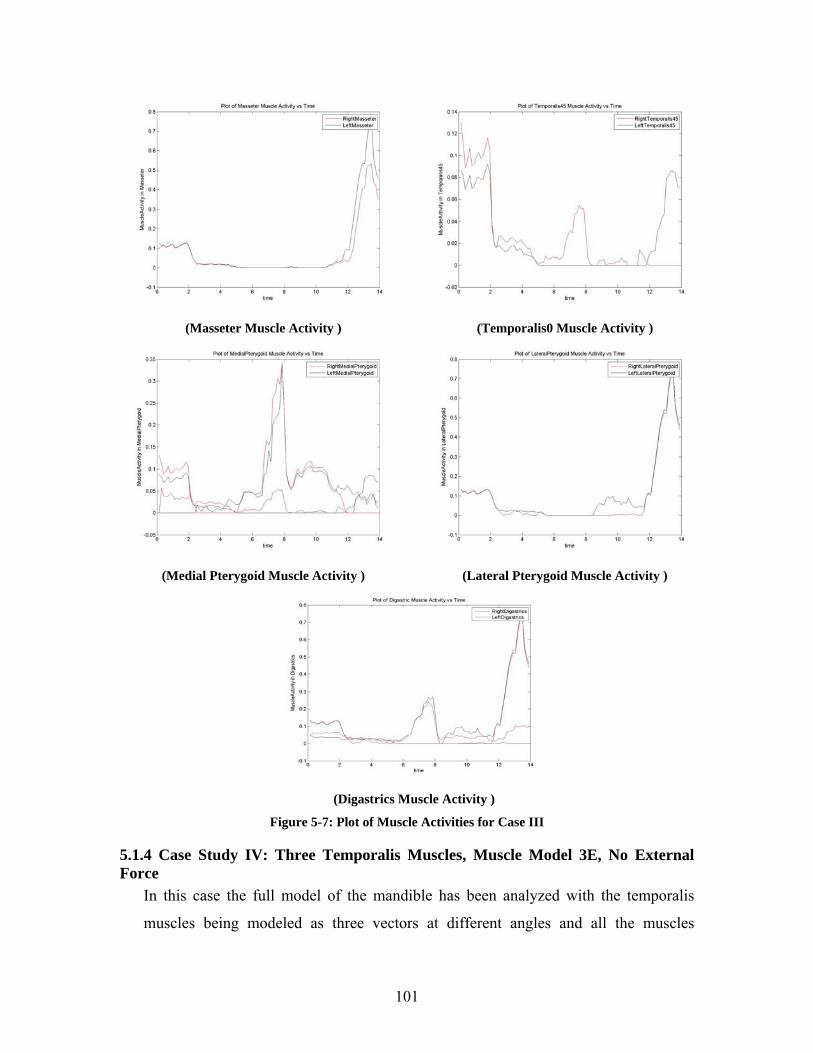
101
(Masseter Muscle Activity ) (Temporalis0 Muscle Activity )
(Medial Pterygoid Muscle Activity ) (Lateral Pterygoid Muscle Activity )
(Digastrics Muscle Activity )
Figure 5-7: Plot of Muscle Activities for Case III
5.1.4 Case Study IV: Three Temporalis Muscles, Muscle Model 3E, No External Force
In this case the full model of the mandible has been analyzed with the temporalis
muscles being modeled as three vectors at different angles and all the muscles
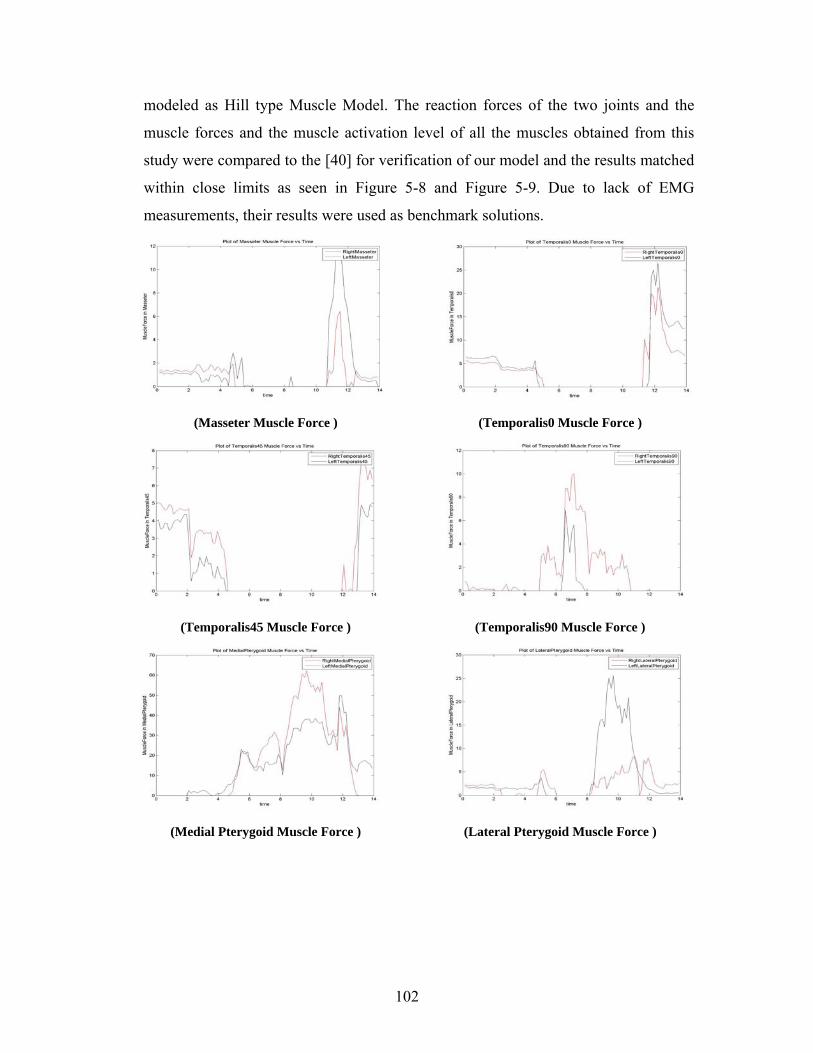
102
modeled as Hill type Muscle Model. The reaction forces of the two joints and the
muscle forces and the muscle activation level of all the muscles obtained from this
study were compared to the [40] for verification of our model and the results matched
within close limits as seen in Figure 5-8 and Figure 5-9. Due to lack of EMG
measurements, their results were used as benchmark solutions.
(Masseter Muscle Force ) (Temporalis0 Muscle Force )
(Temporalis45 Muscle Force ) (Temporalis90 Muscle Force )
(Medial Pterygoid Muscle Force ) (Lateral Pterygoid Muscle Force )
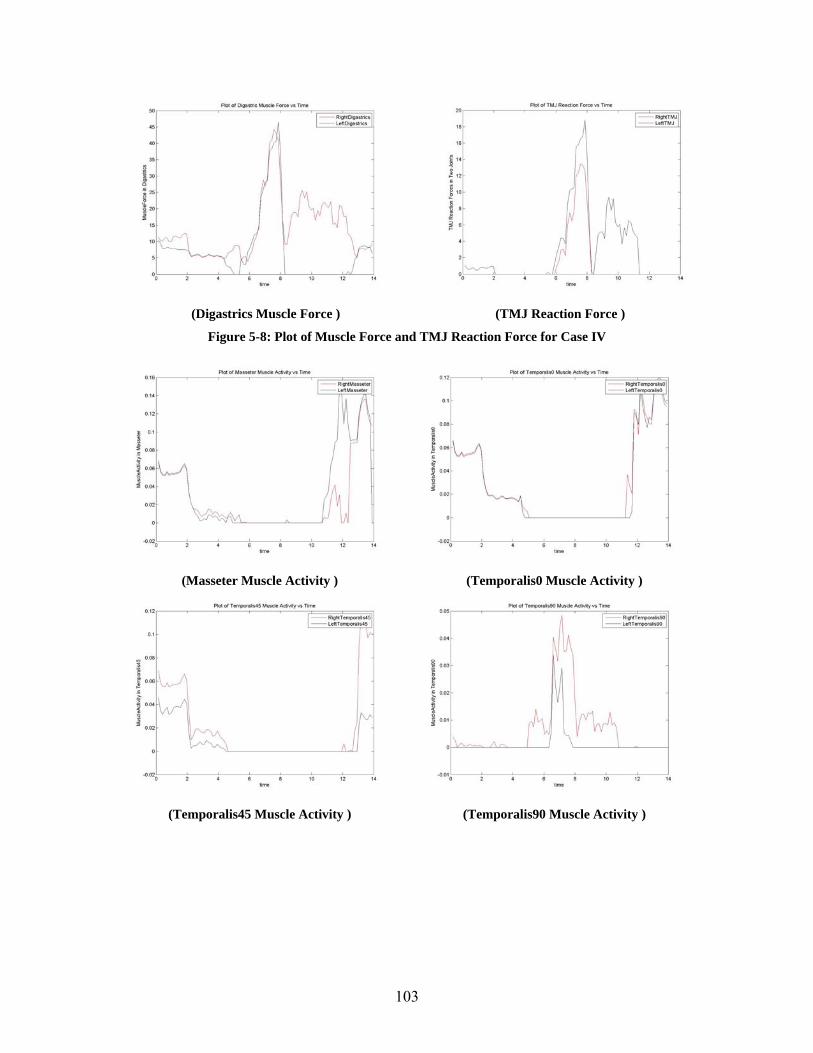
103
(Digastrics Muscle Force ) (TMJ Reaction Force )
Figure 5-8: Plot of Muscle Force and TMJ Reaction Force for Case IV
(Masseter Muscle Activity ) (Temporalis0 Muscle Activity )
(Temporalis45 Muscle Activity ) (Temporalis90 Muscle Activity )
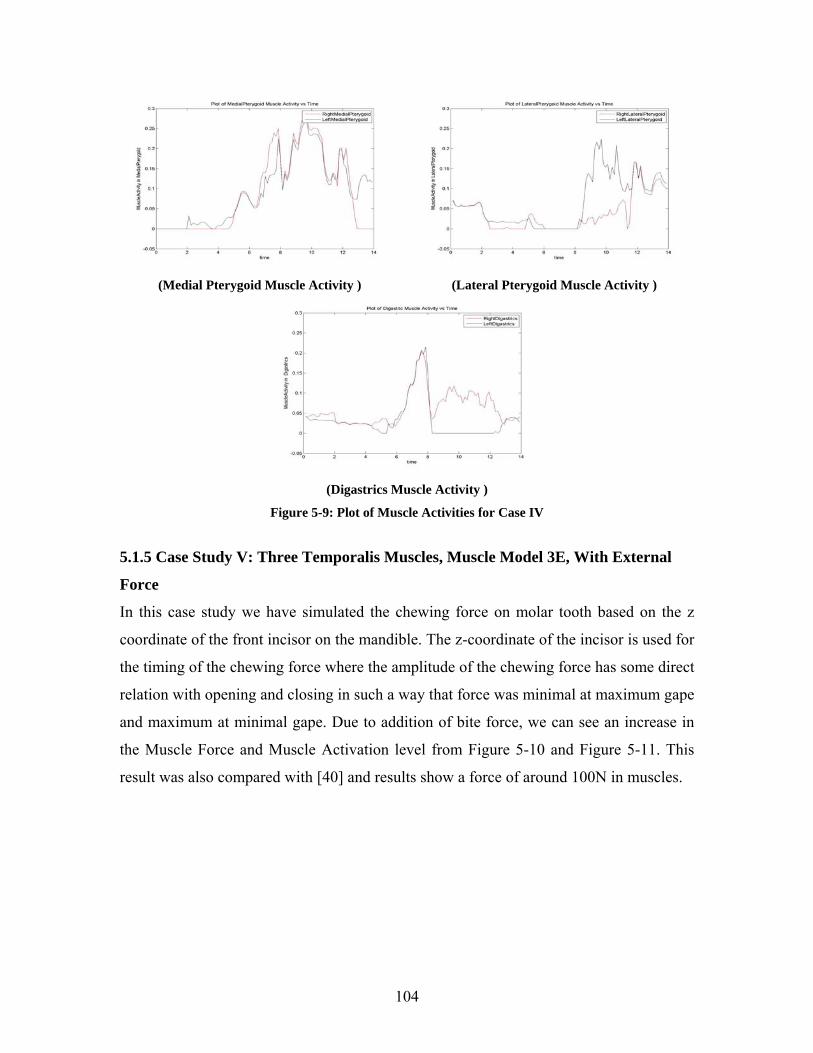
104
(Medial Pterygoid Muscle Activity ) (Lateral Pterygoid Muscle Activity )
(Digastrics Muscle Activity )
Figure 5-9: Plot of Muscle Activities for Case IV
5.1.5 Case Study V: Three Temporalis Muscles, Muscle Model 3E, With External
Force
In this case study we have simulated the chewing force on molar tooth based on the z
coordinate of the front incisor on the mandible. The z-coordinate of the incisor is used for
the timing of the chewing force where the amplitude of the chewing force has some direct
relation with opening and closing in such a way that force was minimal at maximum gape
and maximum at minimal gape. Due to addition of bite force, we can see an increase in
the Muscle Force and Muscle Activation level from Figure 5-10 and Figure 5-11. This
result was also compared with [40] and results show a force of around 100N in muscles.
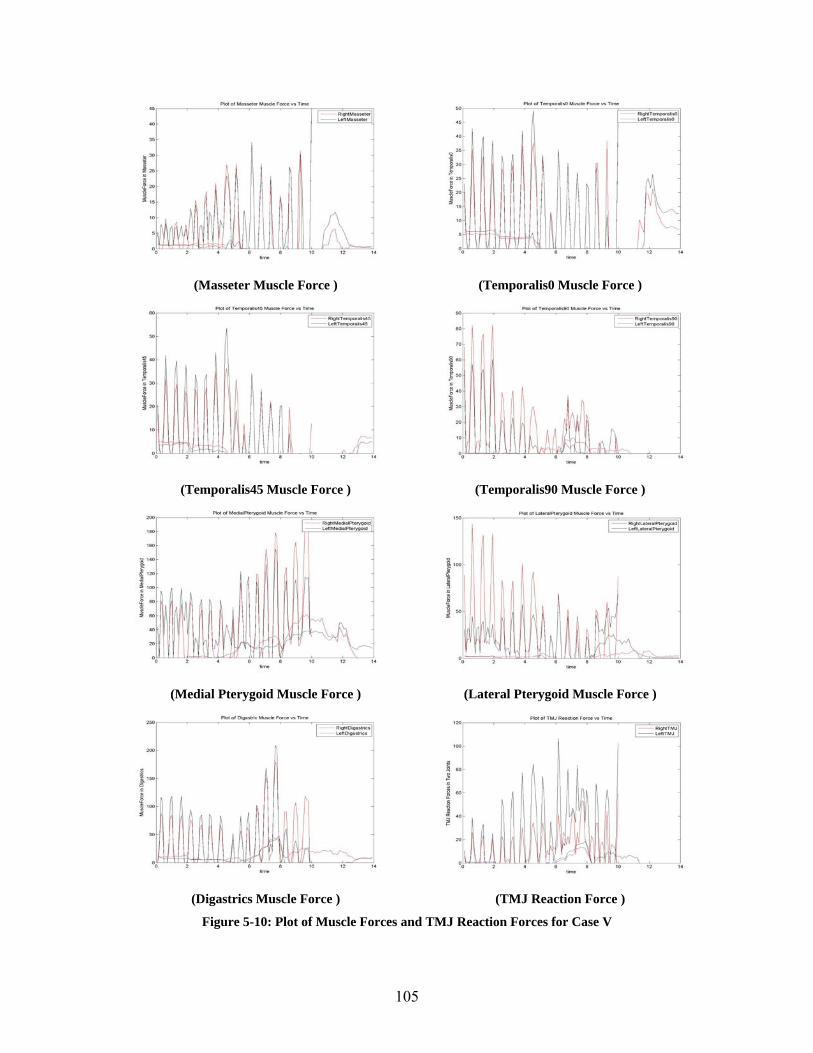
105
(Masseter Muscle Force ) (Temporalis0 Muscle Force )
(Temporalis45 Muscle Force ) (Temporalis90 Muscle Force )
(Medial Pterygoid Muscle Force ) (Lateral Pterygoid Muscle Force )
(Digastrics Muscle Force ) (TMJ Reaction Force )
Figure 5-10: Plot of Muscle Forces and TMJ Reaction Forces for Case V
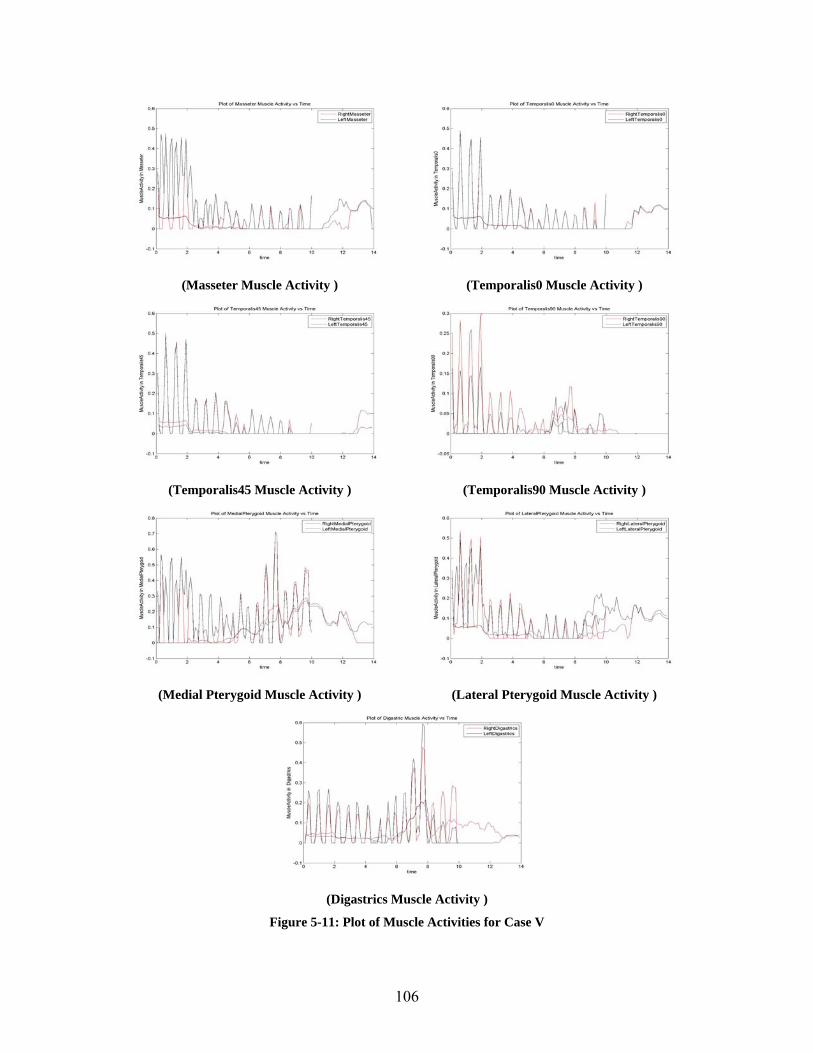
106
(Masseter Muscle Activity ) (Temporalis0 Muscle Activity )
(Temporalis45 Muscle Activity ) (Temporalis90 Muscle Activity )
(Medial Pterygoid Muscle Activity ) (Lateral Pterygoid Muscle Activity )
(Digastrics Muscle Activity )
Figure 5-11: Plot of Muscle Activities for Case V
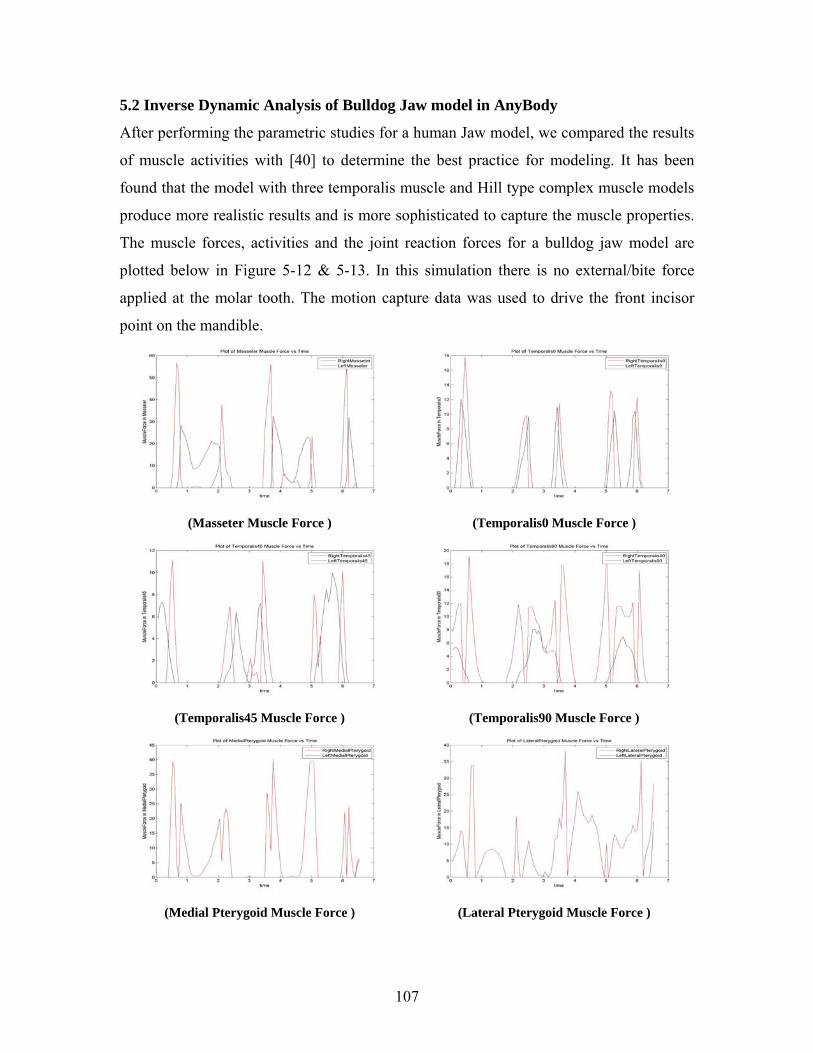
107
5.2 Inverse Dynamic Analysis of Bulldog Jaw model in AnyBody
After performing the parametric studies for a human Jaw model, we compared the results
of muscle activities with [40] to determine the best practice for modeling. It has been
found that the model with three temporalis muscle and Hill type complex muscle models
produce more realistic results and is more sophisticated to capture the muscle properties.
The muscle forces, activities and the joint reaction forces for a bulldog jaw model are
plotted below in Figure 5-12 & 5-13. In this simulation there is no external/bite force
applied at the molar tooth. The motion capture data was used to drive the front incisor
point on the mandible.
(Masseter Muscle Force ) (Temporalis0 Muscle Force )
(Temporalis45 Muscle Force ) (Temporalis90 Muscle Force )
(Medial Pterygoid Muscle Force ) (Lateral Pterygoid Muscle Force )
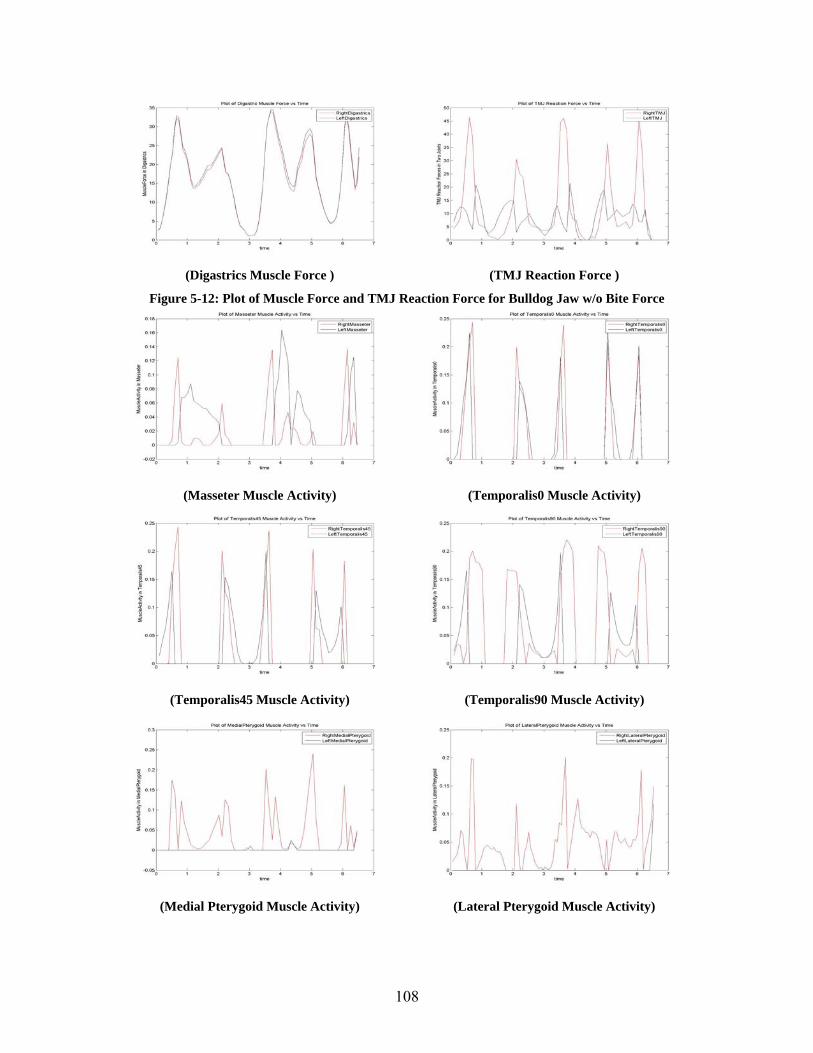
108
(Digastrics Muscle Force ) (TMJ Reaction Force )
Figure 5-12: Plot of Muscle Force and TMJ Reaction Force for Bulldog Jaw w/o Bite Force
(Masseter Muscle Activity) (Temporalis0 Muscle Activity)
(Temporalis45 Muscle Activity) (Temporalis90 Muscle Activity)
(Medial Pterygoid Muscle Activity) (Lateral Pterygoid Muscle Activity)
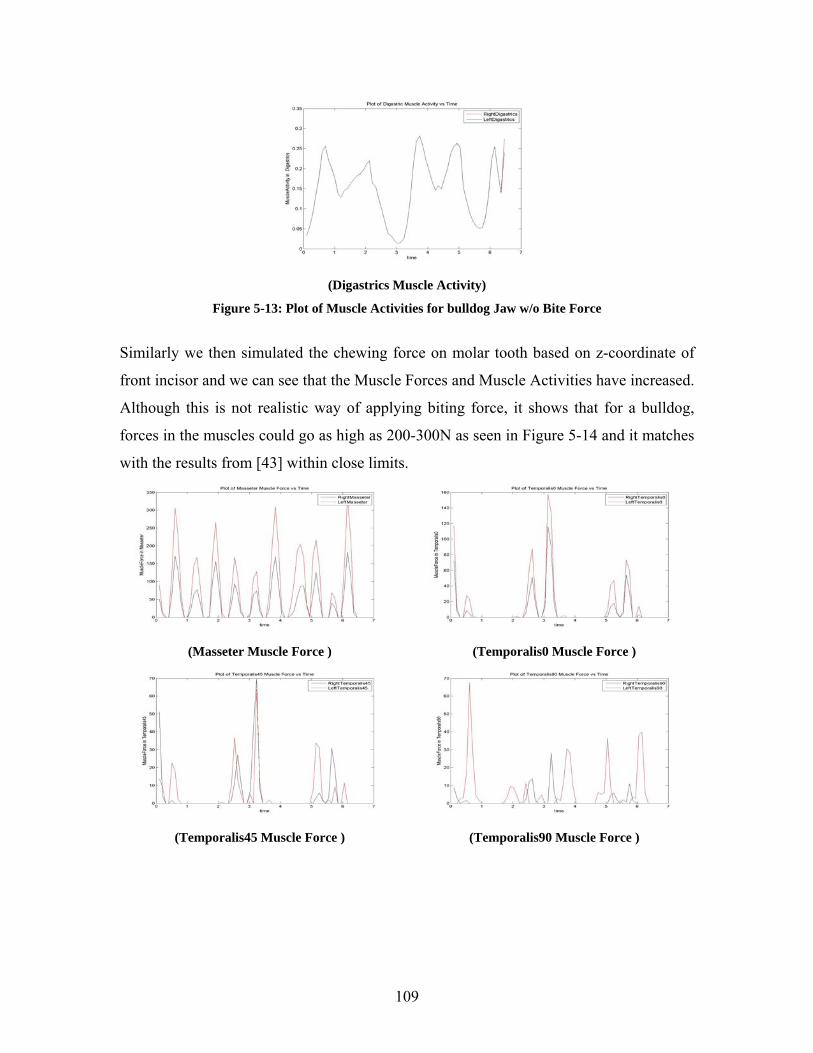
109
(Digastrics Muscle Activity)
Figure 5-13: Plot of Muscle Activities for bulldog Jaw w/o Bite Force
Similarly we then simulated the chewing force on molar tooth based on z-coordinate of
front incisor and we can see that the Muscle Forces and Muscle Activities have increased.
Although this is not realistic way of applying biting force, it shows that for a bulldog,
forces in the muscles could go as high as 200-300N as seen in Figure 5-14 and it matches
with the results from [43] within close limits.
(Masseter Muscle Force ) (Temporalis0 Muscle Force )
(Temporalis45 Muscle Force ) (Temporalis90 Muscle Force )
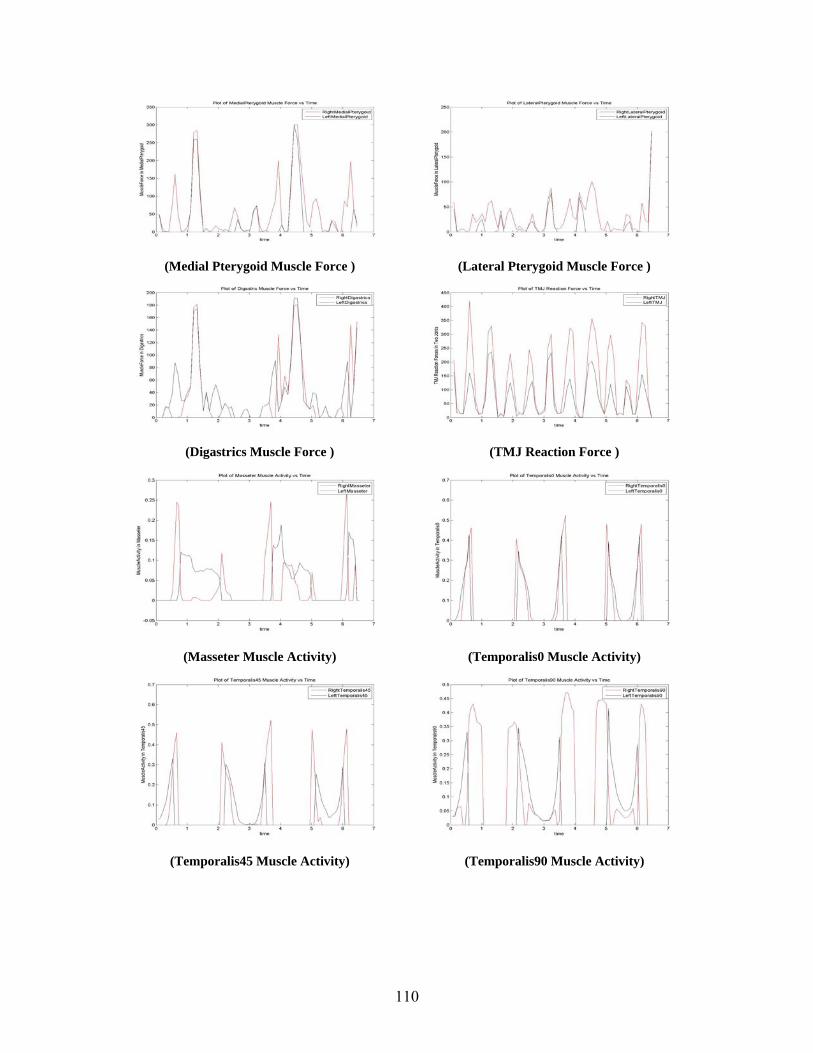
110
(Medial Pterygoid Muscle Force ) (Lateral Pterygoid Muscle Force )
(Digastrics Muscle Force ) (TMJ Reaction Force )
(Masseter Muscle Activity) (Temporalis0 Muscle Activity)
(Temporalis45 Muscle Activity) (Temporalis90 Muscle Activity)
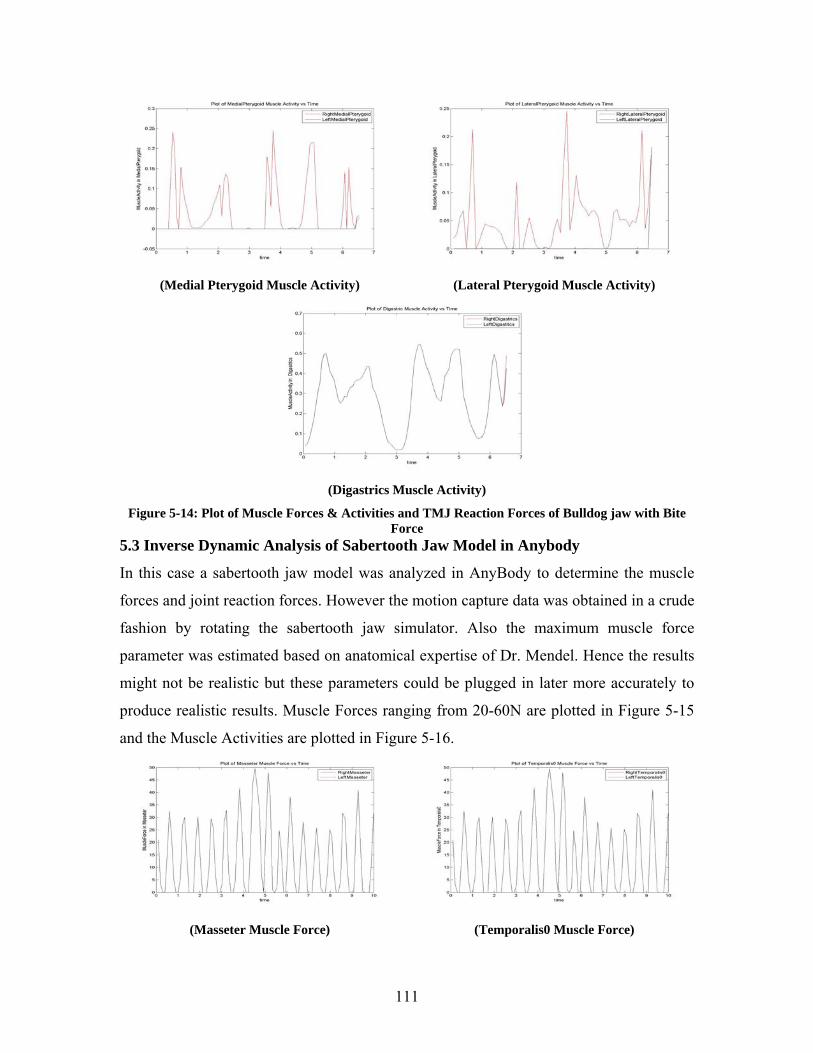
111
(Medial Pterygoid Muscle Activity) (Lateral Pterygoid Muscle Activity)
(Digastrics Muscle Activity)
Figure 5-14: Plot of Muscle Forces & Activities and TMJ Reaction Forces of Bulldog jaw with Bite Force
5.3 Inverse Dynamic Analysis of Sabertooth Jaw Model in Anybody
In this case a sabertooth jaw model was analyzed in AnyBody to determine the muscle
forces and joint reaction forces. However the motion capture data was obtained in a crude
fashion by rotating the sabertooth jaw simulator. Also the maximum muscle force
parameter was estimated based on anatomical expertise of Dr. Mendel. Hence the results
might not be realistic but these parameters could be plugged in later more accurately to
produce realistic results. Muscle Forces ranging from 20-60N are plotted in Figure 5-15
and the Muscle Activities are plotted in Figure 5-16.
(Masseter Muscle Force) (Temporalis0 Muscle Force)
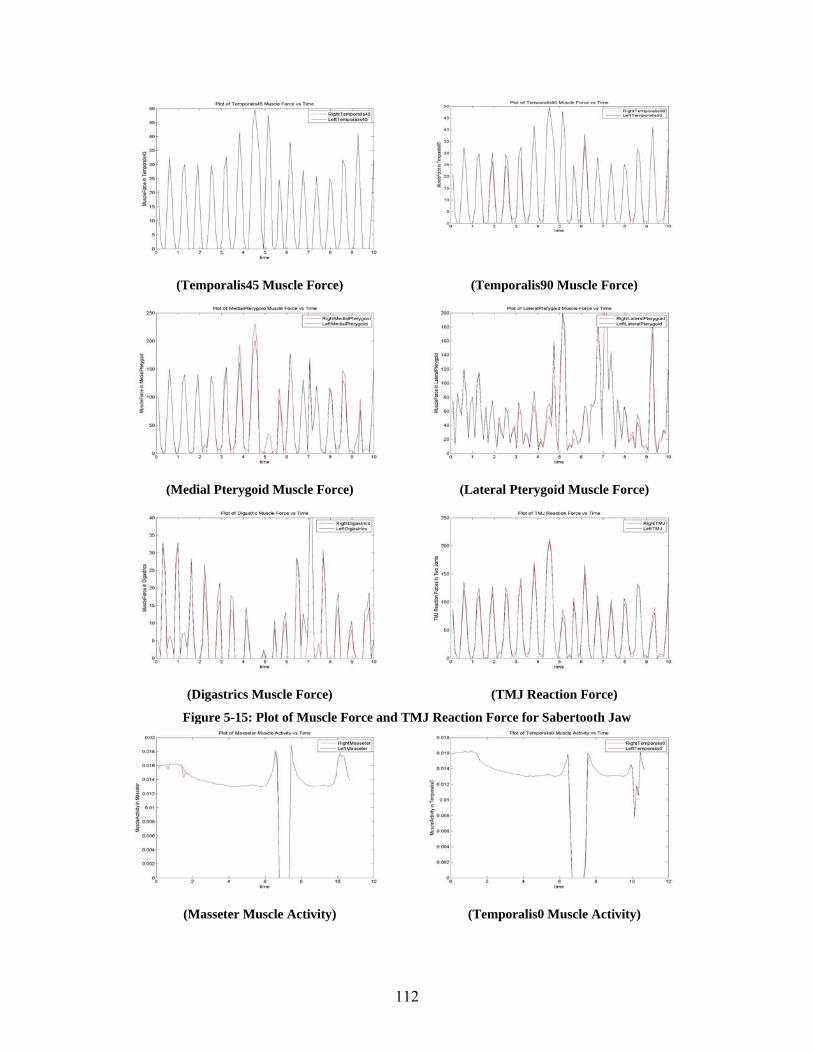
112
(Temporalis45 Muscle Force) (Temporalis90 Muscle Force)
(Medial Pterygoid Muscle Force) (Lateral Pterygoid Muscle Force)
(Digastrics Muscle Force) (TMJ Reaction Force)
Figure 5-15: Plot of Muscle Force and TMJ Reaction Force for Sabertooth Jaw
(Masseter Muscle Activity) (Temporalis0 Muscle Activity)
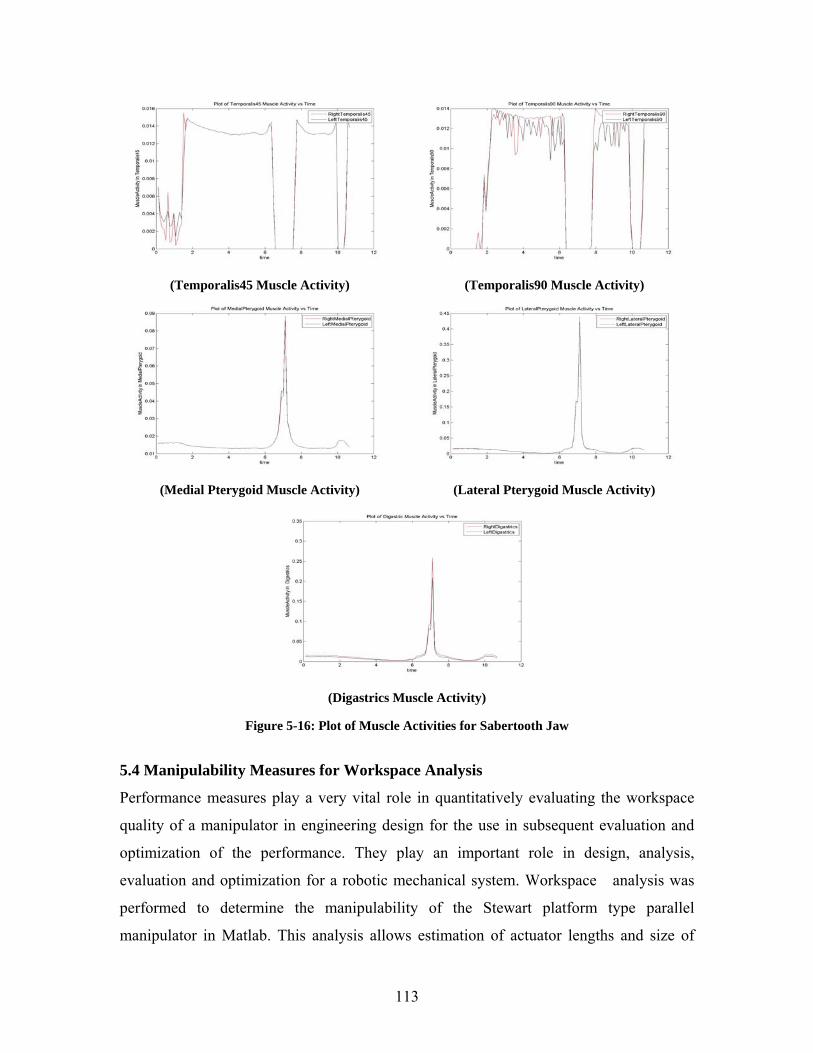
113
(Temporalis45 Muscle Activity) (Temporalis90 Muscle Activity)
(Medial Pterygoid Muscle Activity) (Lateral Pterygoid Muscle Activity)
(Digastrics Muscle Activity)
Figure 5-16: Plot of Muscle Activities for Sabertooth Jaw
5.4 Manipulability Measures for Workspace Analysis
Performance measures play a very vital role in quantitatively evaluating the workspace
quality of a manipulator in engineering design for the use in subsequent evaluation and
optimization of the performance. They play an important role in design, analysis,
evaluation and optimization for a robotic mechanical system. Workspace analysis was
performed to determine the manipulability of the Stewart platform type parallel
manipulator in Matlab. This analysis allows estimation of actuator lengths and size of
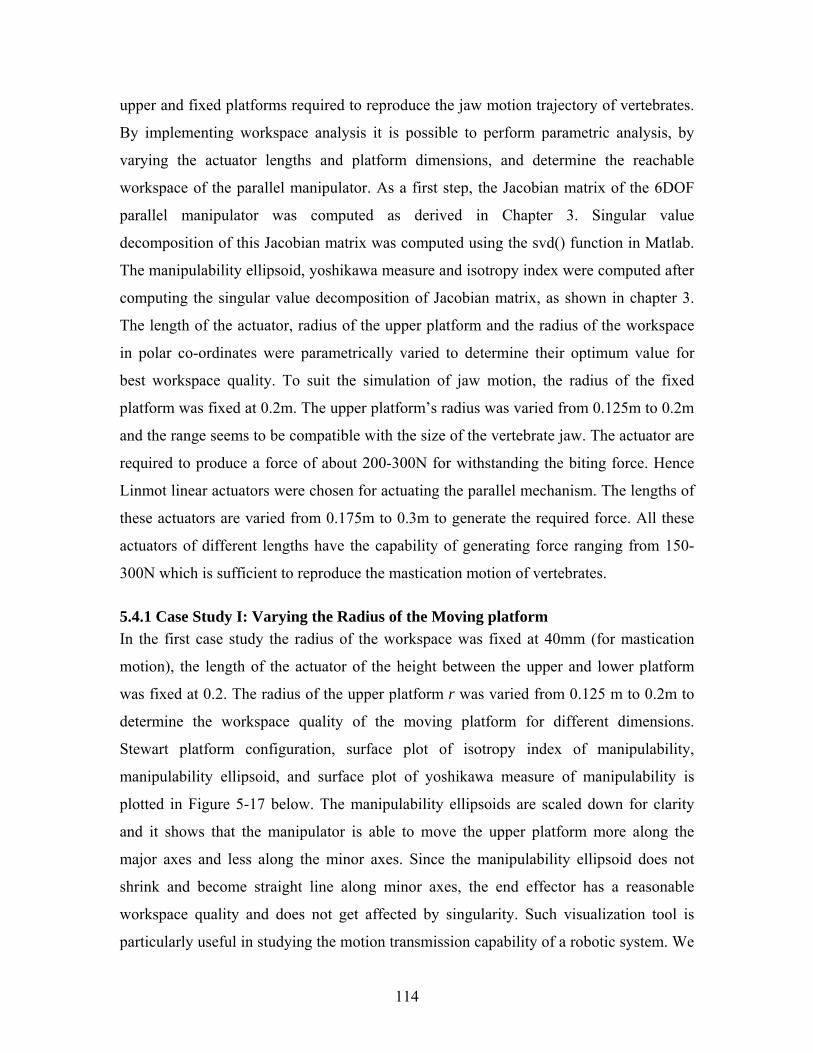
114
upper and fixed platforms required to reproduce the jaw motion trajectory of vertebrates.
By implementing workspace analysis it is possible to perform parametric analysis, by
varying the actuator lengths and platform dimensions, and determine the reachable
workspace of the parallel manipulator. As a first step, the Jacobian matrix of the 6DOF
parallel manipulator was computed as derived in Chapter 3. Singular value
decomposition of this Jacobian matrix was computed using the svd() function in Matlab.
The manipulability ellipsoid, yoshikawa measure and isotropy index were computed after
computing the singular value decomposition of Jacobian matrix, as shown in chapter 3.
The length of the actuator, radius of the upper platform and the radius of the workspace
in polar co-ordinates were parametrically varied to determine their optimum value for
best workspace quality. To suit the simulation of jaw motion, the radius of the fixed
platform was fixed at 0.2m. The upper platform’s radius was varied from 0.125m to 0.2m
and the range seems to be compatible with the size of the vertebrate jaw. The actuator are
required to produce a force of about 200-300N for withstanding the biting force. Hence
Linmot linear actuators were chosen for actuating the parallel mechanism. The lengths of
these actuators are varied from 0.175m to 0.3m to generate the required force. All these
actuators of different lengths have the capability of generating force ranging from 150-
300N which is sufficient to reproduce the mastication motion of vertebrates.
5.4.1 Case Study I: Varying the Radius of the Moving platform In the first case study the radius of the workspace was fixed at 40mm (for mastication
motion), the length of the actuator of the height between the upper and lower platform
was fixed at 0.2. The radius of the upper platform r was varied from 0.125 m to 0.2m to
determine the workspace quality of the moving platform for different dimensions.
Stewart platform configuration, surface plot of isotropy index of manipulability,
manipulability ellipsoid, and surface plot of yoshikawa measure of manipulability is
plotted in Figure 5-17 below. The manipulability ellipsoids are scaled down for clarity
and it shows that the manipulator is able to move the upper platform more along the
major axes and less along the minor axes. Since the manipulability ellipsoid does not
shrink and become straight line along minor axes, the end effector has a reasonable
workspace quality and does not get affected by singularity. Such visualization tool is
particularly useful in studying the motion transmission capability of a robotic system. We
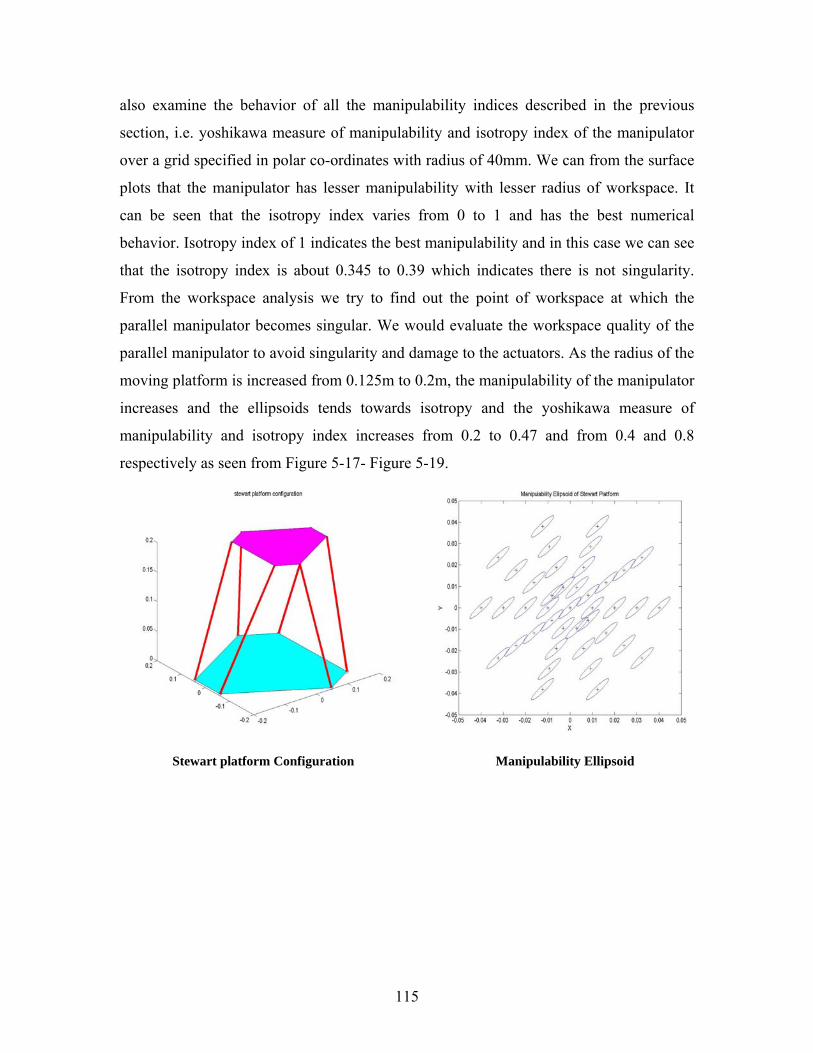
115
also examine the behavior of all the manipulability indices described in the previous
section, i.e. yoshikawa measure of manipulability and isotropy index of the manipulator
over a grid specified in polar co-ordinates with radius of 40mm. We can from the surface
plots that the manipulator has lesser manipulability with lesser radius of workspace. It
can be seen that the isotropy index varies from 0 to 1 and has the best numerical
behavior. Isotropy index of 1 indicates the best manipulability and in this case we can see
that the isotropy index is about 0.345 to 0.39 which indicates there is not singularity.
From the workspace analysis we try to find out the point of workspace at which the
parallel manipulator becomes singular. We would evaluate the workspace quality of the
parallel manipulator to avoid singularity and damage to the actuators. As the radius of the
moving platform is increased from 0.125m to 0.2m, the manipulability of the manipulator
increases and the ellipsoids tends towards isotropy and the yoshikawa measure of
manipulability and isotropy index increases from 0.2 to 0.47 and from 0.4 and 0.8
respectively as seen from Figure 5-17- Figure 5-19.
Stewart platform Configuration Manipulability Ellipsoid
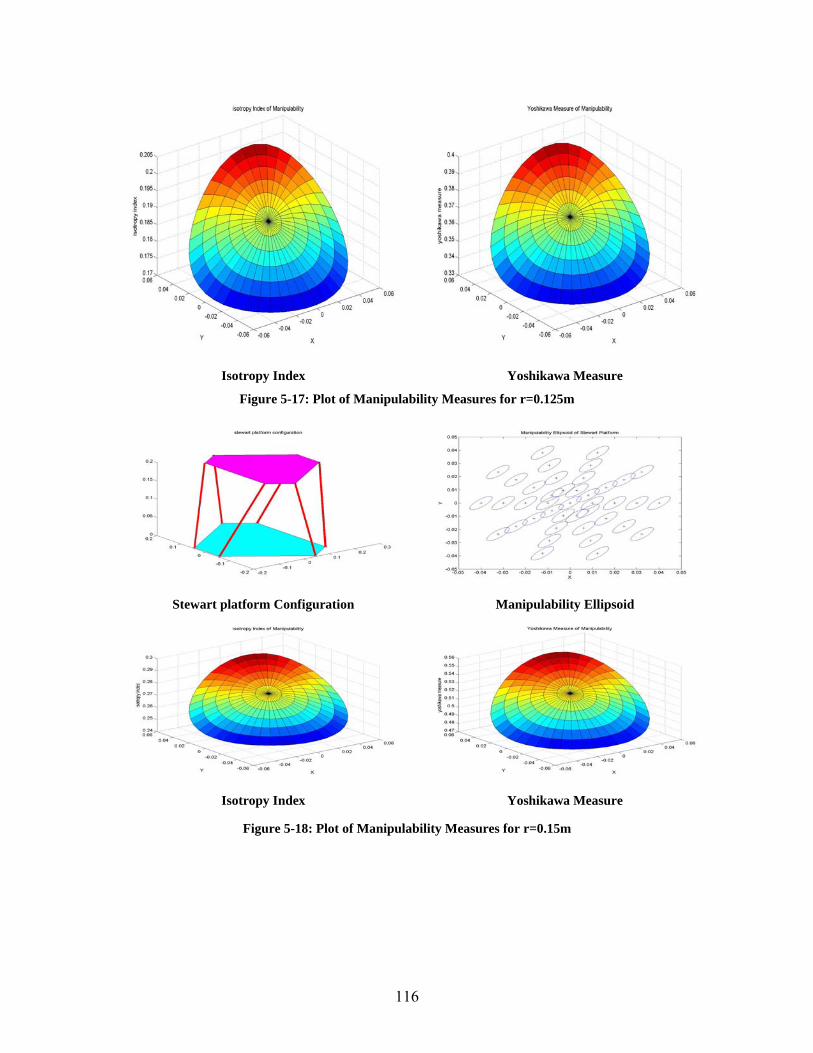
116
Isotropy Index Yoshikawa Measure
Figure 5-17: Plot of Manipulability Measures for r=0.125m
Stewart platform Configuration Manipulability Ellipsoid
Isotropy Index Yoshikawa Measure
Figure 5-18: Plot of Manipulability Measures for r=0.15m
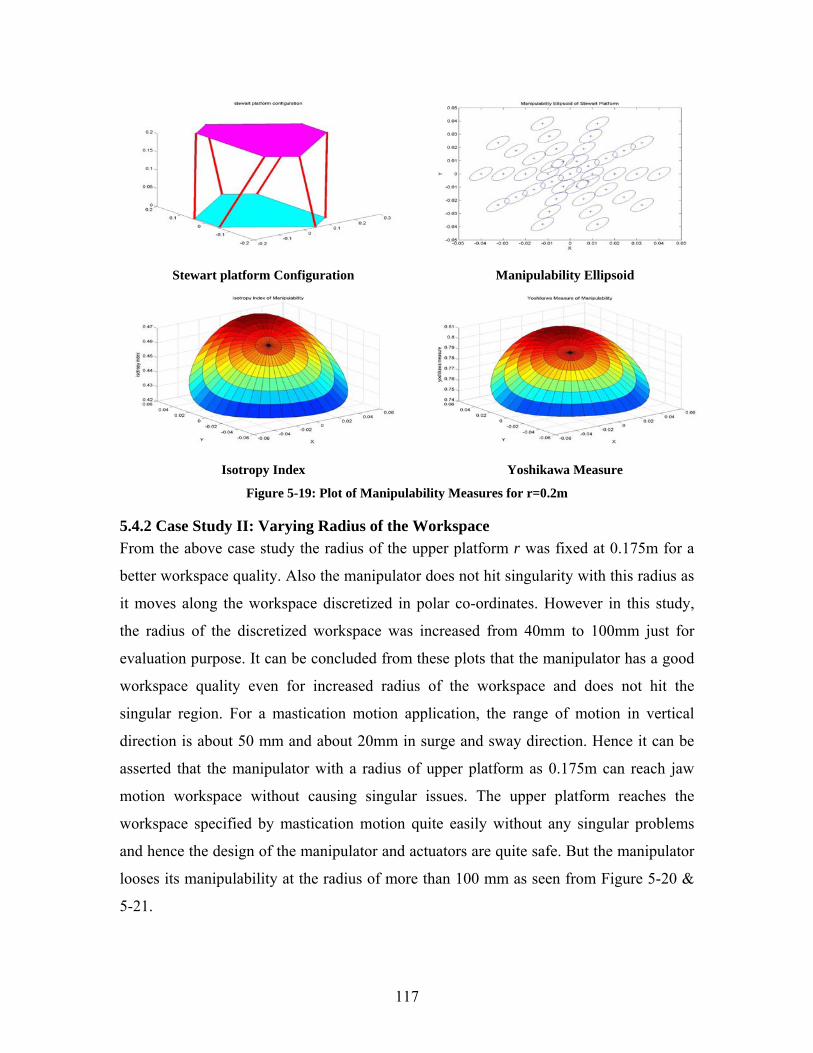
117
Stewart platform Configuration Manipulability Ellipsoid
Isotropy Index Yoshikawa Measure Figure 5-19: Plot of Manipulability Measures for r=0.2m
5.4.2 Case Study II: Varying Radius of the Workspace From the above case study the radius of the upper platform r was fixed at 0.175m for a
better workspace quality. Also the manipulator does not hit singularity with this radius as
it moves along the workspace discretized in polar co-ordinates. However in this study,
the radius of the discretized workspace was increased from 40mm to 100mm just for
evaluation purpose. It can be concluded from these plots that the manipulator has a good
workspace quality even for increased radius of the workspace and does not hit the
singular region. For a mastication motion application, the range of motion in vertical
direction is about 50 mm and about 20mm in surge and sway direction. Hence it can be
asserted that the manipulator with a radius of upper platform as 0.175m can reach jaw
motion workspace without causing singular issues. The upper platform reaches the
workspace specified by mastication motion quite easily without any singular problems
and hence the design of the manipulator and actuators are quite safe. But the manipulator
looses its manipulability at the radius of more than 100 mm as seen from Figure 5-20 &
5-21.
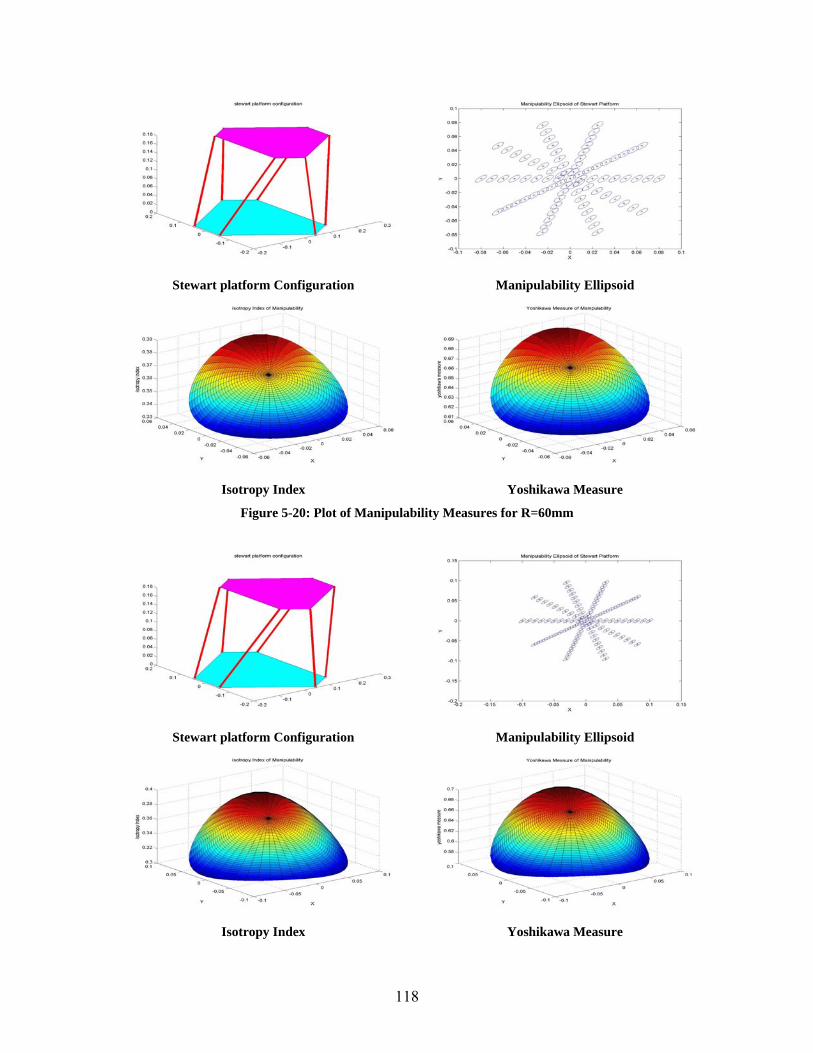
118
Stewart platform Configuration Manipulability Ellipsoid
Isotropy Index Yoshikawa Measure Figure 5-20: Plot of Manipulability Measures for R=60mm
Stewart platform Configuration Manipulability Ellipsoid
Isotropy Index Yoshikawa Measure
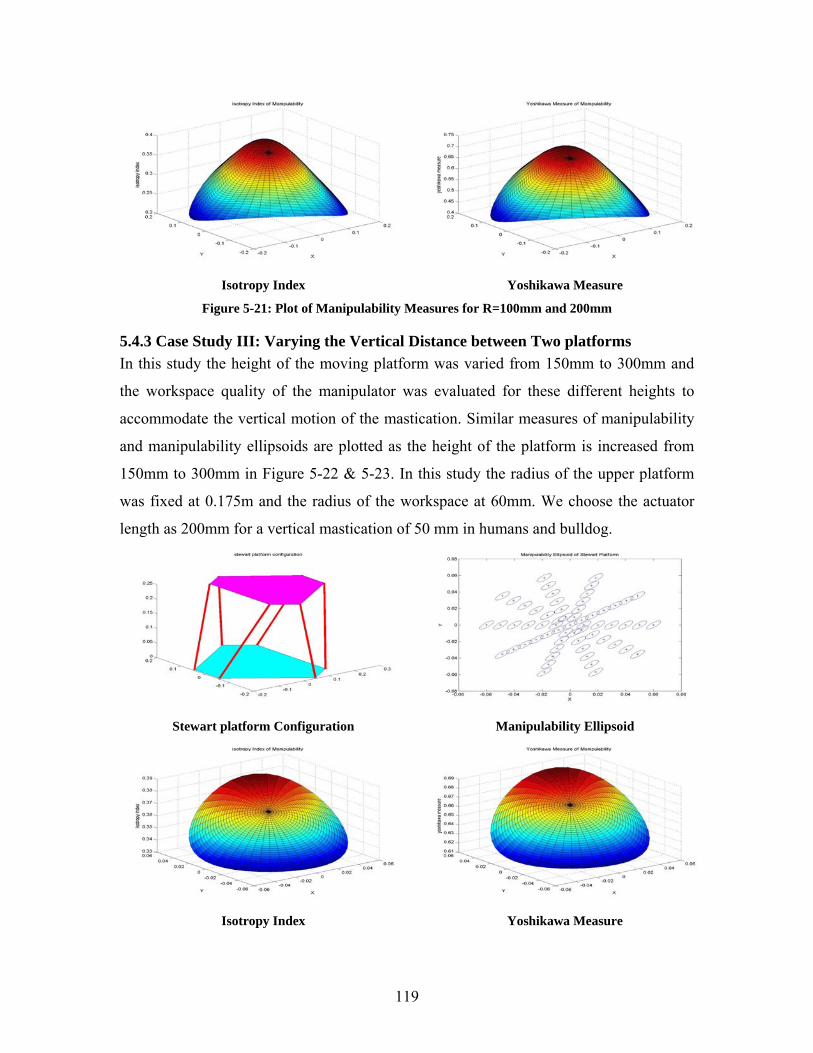
119
Isotropy Index Yoshikawa Measure Figure 5-21: Plot of Manipulability Measures for R=100mm and 200mm
5.4.3 Case Study III: Varying the Vertical Distance between Two platforms In this study the height of the moving platform was varied from 150mm to 300mm and
the workspace quality of the manipulator was evaluated for these different heights to
accommodate the vertical motion of the mastication. Similar measures of manipulability
and manipulability ellipsoids are plotted as the height of the platform is increased from
150mm to 300mm in Figure 5-22 & 5-23. In this study the radius of the upper platform
was fixed at 0.175m and the radius of the workspace at 60mm. We choose the actuator
length as 200mm for a vertical mastication of 50 mm in humans and bulldog.
Stewart platform Configuration Manipulability Ellipsoid
Isotropy Index Yoshikawa Measure
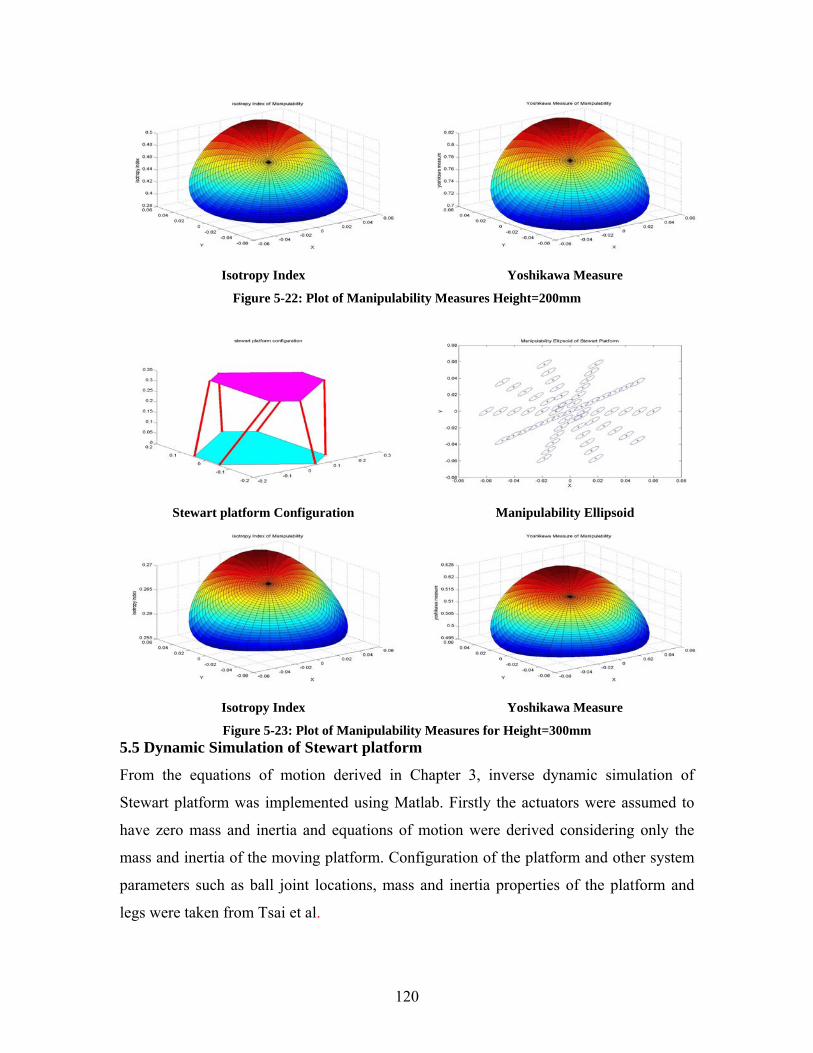
120
Isotropy Index Yoshikawa Measure Figure 5-22: Plot of Manipulability Measures Height=200mm
Stewart platform Configuration Manipulability Ellipsoid
Isotropy Index Yoshikawa Measure Figure 5-23: Plot of Manipulability Measures for Height=300mm
5.5 Dynamic Simulation of Stewart platform
From the equations of motion derived in Chapter 3, inverse dynamic simulation of
Stewart platform was implemented using Matlab. Firstly the actuators were assumed to
have zero mass and inertia and equations of motion were derived considering only the
mass and inertia of the moving platform. Configuration of the platform and other system
parameters such as ball joint locations, mass and inertia properties of the platform and
legs were taken from Tsai et al.
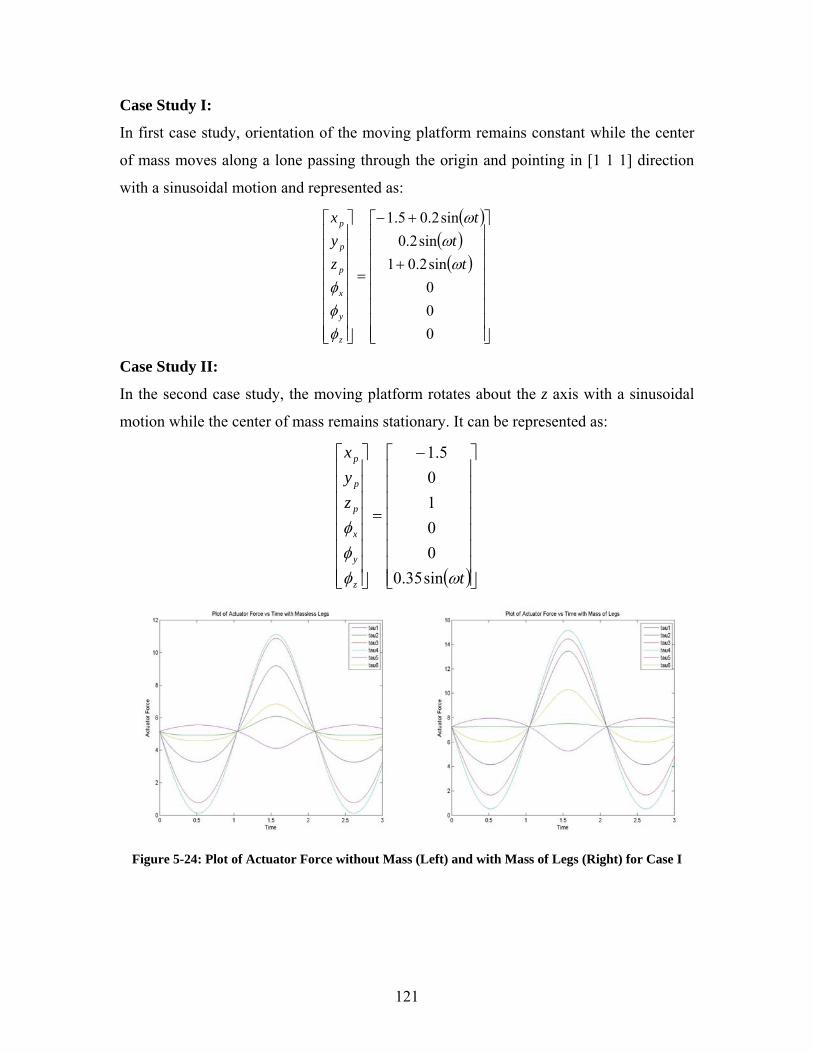
121
Case Study I:
In first case study, orientation of the moving platform remains constant while the center
of mass moves along a lone passing through the origin and pointing in [1 1 1] direction
with a sinusoidal motion and represented as:
( )( )( )
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
+−
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
000sin2.01
sin2.0sin2.05.1
tt
t
zyx
z
y
x
p
p
p
ωω
ω
φφφ
Case Study II:
In the second case study, the moving platform rotates about the z axis with a sinusoidal
motion while the center of mass remains stationary. It can be represented as:
( )⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡ −
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
t
zyx
z
y
x
p
p
p
ωφφφ
sin35.00010
5.1
Figure 5-24: Plot of Actuator Force without Mass (Left) and with Mass of Legs (Right) for Case I

122
Figure 5-25: Plot of Actuator Force without Mass (Left) and with Mass of Legs (Right) for Case II The above Figure 5-24 and 5-25 show the forces acting in each of the six actuators as the
moving platform is tracking desired end effector trajectory as specified in case study I
and II. From the above two plots we can see that the actuator force has a sinusoidal form
and its magnitude is ranging between 0 N to 11N in first case and 3.4N to 6.6N in second
case. Now the actuators were assigned mass and inertia properties and the equations of
motion included the contribution of the six actuators to the mass/inertia matrix. Similarly
the above plots show the forces acting in each of the six actuators, by including the
dynamics of the legs as well, as the moving platform is tracking desired end effector
trajectory as specified in case study I and II. From the above two plots we can see that the
actuator force has a sinusoidal form and its magnitude is ranging between 0 N to 15N in
first case and 4.5N to 9.5N in second case. As the results from the second set of study
including the dynamics of leg produces more accurate results when compared to the
results from Tsai, it can be concluded that the dynamics of six actuators plays a important
role while deriving the equations of motion. For the purpose of sliding mode control,
some researchers have neglected the dynamic properties of legs for simplicity and
implemented the control algorithm. However from the above results it can be stated that
the dynamics of the legs contributes to the actuator forces and increases the magnitude of
these six actuator forces. Hence in the subsequent inverse dynamic simulation for
simulating the jaw motion, dynamics of the six actuators will be considered while
deriving the equations of motion.

123
A PD control based feedback linearization technique has been implemented using
Matlab/Simulink to make sure that the moving platform tracks the desired trajectory and
the error between the desired trajectory and the end-effector (moving platform) trajectory
converges to zero. Trajectory control of a six DOF Stewart platform type parallel
manipulator was simulated using 1. Matlab/Simulink 2. DynaFlexPro. For validation
purposes, the system parameters and the desired trajectory information were taken from
Tsai to verify if our Lagrangian formulation, DynaFlexPro model and control algorithm
worked efficiently. In these simulations inverse dynamic block computes forces required
at the six actuators and feeds to forward dynamics block for computing current position
and orientation of platform and the current position is first fed to the PD control block
which measures the difference between desired and end-effector trajectory and uses
control gains to minimize and converge the error to zero. It is then fed back to the inverse
dynamics block to compute the actuator forces and closed loop PD control goes on. In the
first method the forward dynamics block, which computes the current end-effector
position and orientation, is implemented based on Lagrangian Formulation using an S-
Function block. In the second method, a DynaFlexPro Forward Dynamics model was
built to compute the end-effector position and orientation based on actuator forces and
this replaces the S-Function block. The two methods are simulated for tracking the
desired trajectories as mentioned in two case studies above and actuator forces obtained
from these methods are then compared to the results of Tsai and [49] to validate our
inverse and forward dynamic simulation and control framework.
5.5.1 Simulation Using S-Function: Case Study I
Firstly inverse and forward dynamics of Stewart platform type 6 DOF parallel
manipulator with PD controller was simulated completely in Matlab/Simulink.
Configuration of the platform and other system parameters such as ball joint locations,
mass and inertia properties of the platform and legs were taken from Tsai. Following
simulations were performed to verify the results and the implementation from both
Matlab and DynaFlexPro. It is assumed that the gravitational force is the only external
force acting on the links. For this simulation the orientation of the moving platform
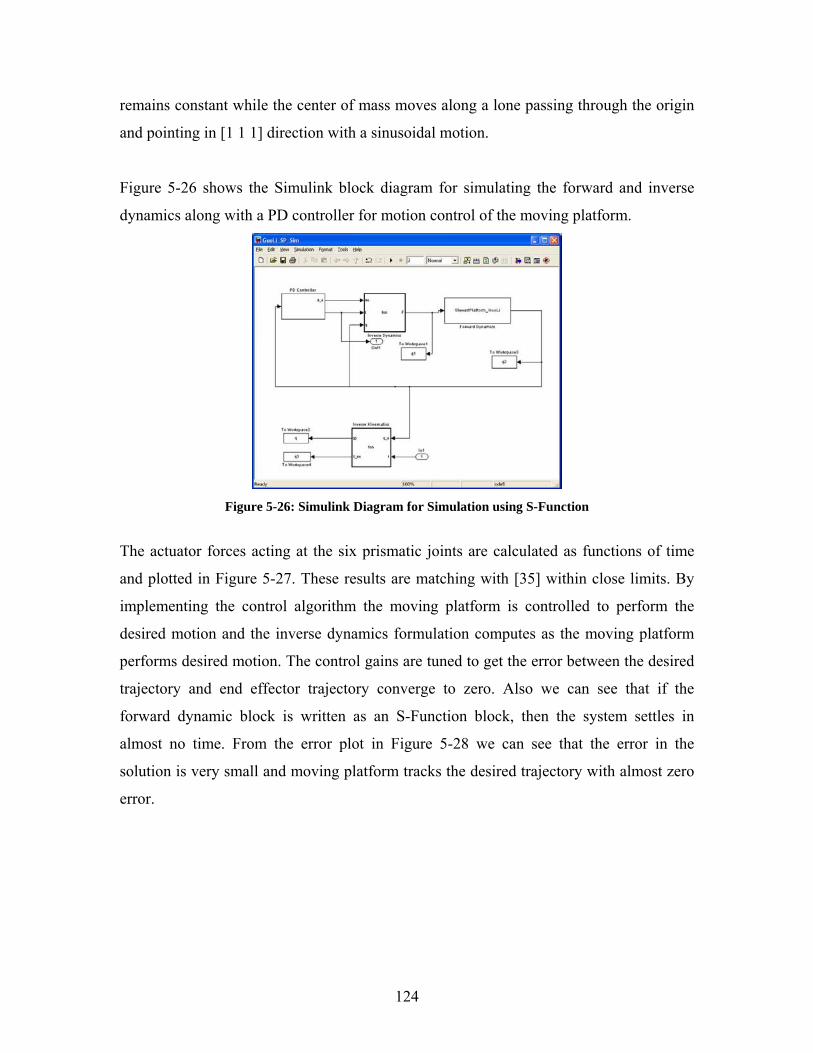
124
remains constant while the center of mass moves along a lone passing through the origin
and pointing in [1 1 1] direction with a sinusoidal motion.
Figure 5-26 shows the Simulink block diagram for simulating the forward and inverse
dynamics along with a PD controller for motion control of the moving platform.
Figure 5-26: Simulink Diagram for Simulation using S-Function
The actuator forces acting at the six prismatic joints are calculated as functions of time
and plotted in Figure 5-27. These results are matching with [35] within close limits. By
implementing the control algorithm the moving platform is controlled to perform the
desired motion and the inverse dynamics formulation computes as the moving platform
performs desired motion. The control gains are tuned to get the error between the desired
trajectory and end effector trajectory converge to zero. Also we can see that if the
forward dynamic block is written as an S-Function block, then the system settles in
almost no time. From the error plot in Figure 5-28 we can see that the error in the
solution is very small and moving platform tracks the desired trajectory with almost zero
error.
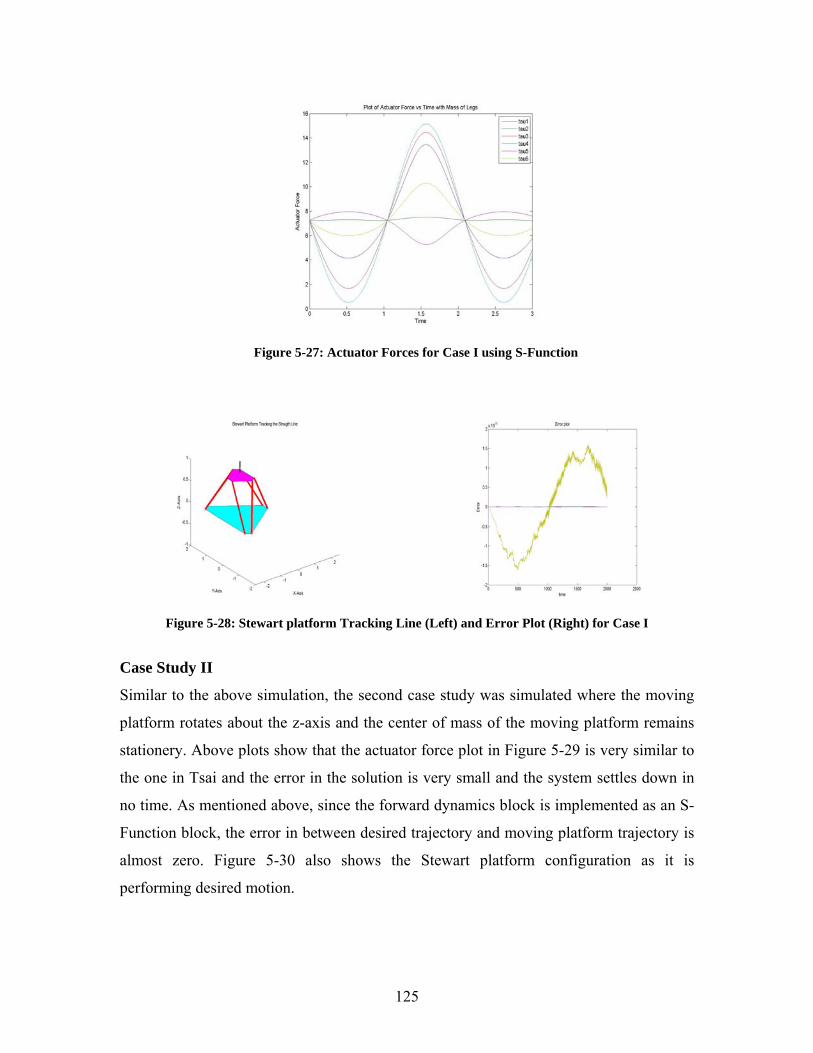
125
Figure 5-27: Actuator Forces for Case I using S-Function
Figure 5-28: Stewart platform Tracking Line (Left) and Error Plot (Right) for Case I
Case Study II
Similar to the above simulation, the second case study was simulated where the moving
platform rotates about the z-axis and the center of mass of the moving platform remains
stationery. Above plots show that the actuator force plot in Figure 5-29 is very similar to
the one in Tsai and the error in the solution is very small and the system settles down in
no time. As mentioned above, since the forward dynamics block is implemented as an S-
Function block, the error in between desired trajectory and moving platform trajectory is
almost zero. Figure 5-30 also shows the Stewart platform configuration as it is
performing desired motion.
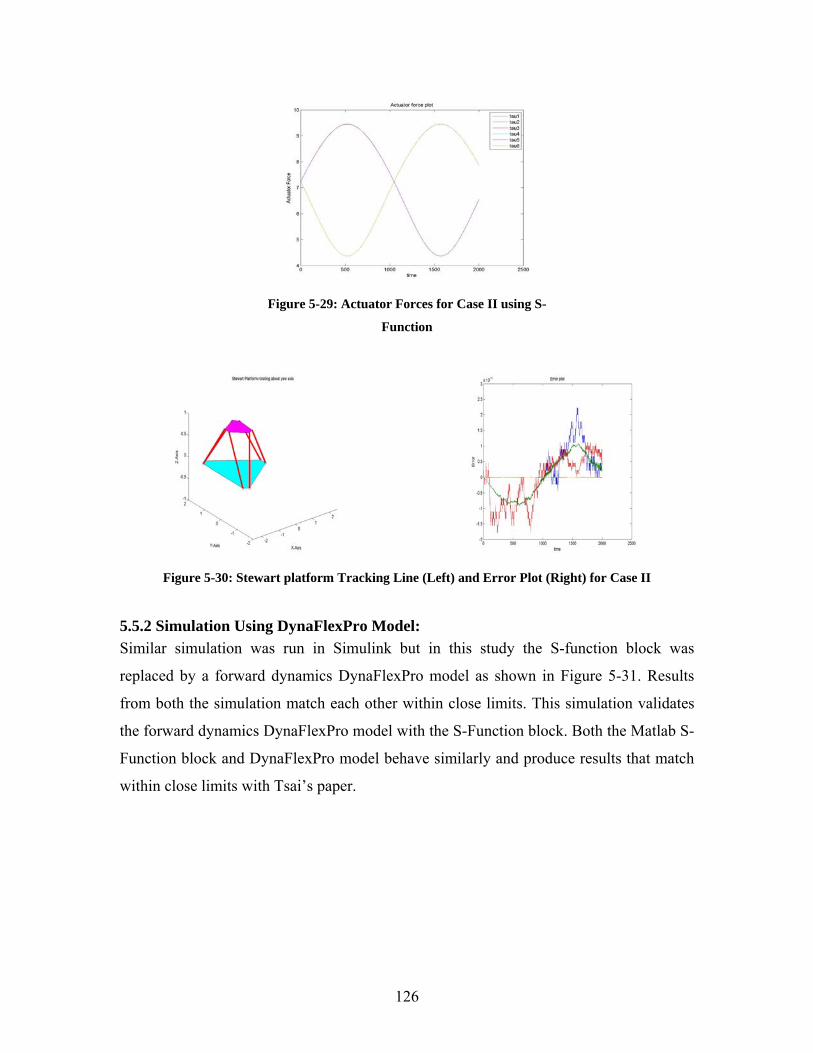
126
Figure 5-29: Actuator Forces for Case II using S-
Function
Figure 5-30: Stewart platform Tracking Line (Left) and Error Plot (Right) for Case II
5.5.2 Simulation Using DynaFlexPro Model: Similar simulation was run in Simulink but in this study the S-function block was
replaced by a forward dynamics DynaFlexPro model as shown in Figure 5-31. Results
from both the simulation match each other within close limits. This simulation validates
the forward dynamics DynaFlexPro model with the S-Function block. Both the Matlab S-
Function block and DynaFlexPro model behave similarly and produce results that match
within close limits with Tsai’s paper.
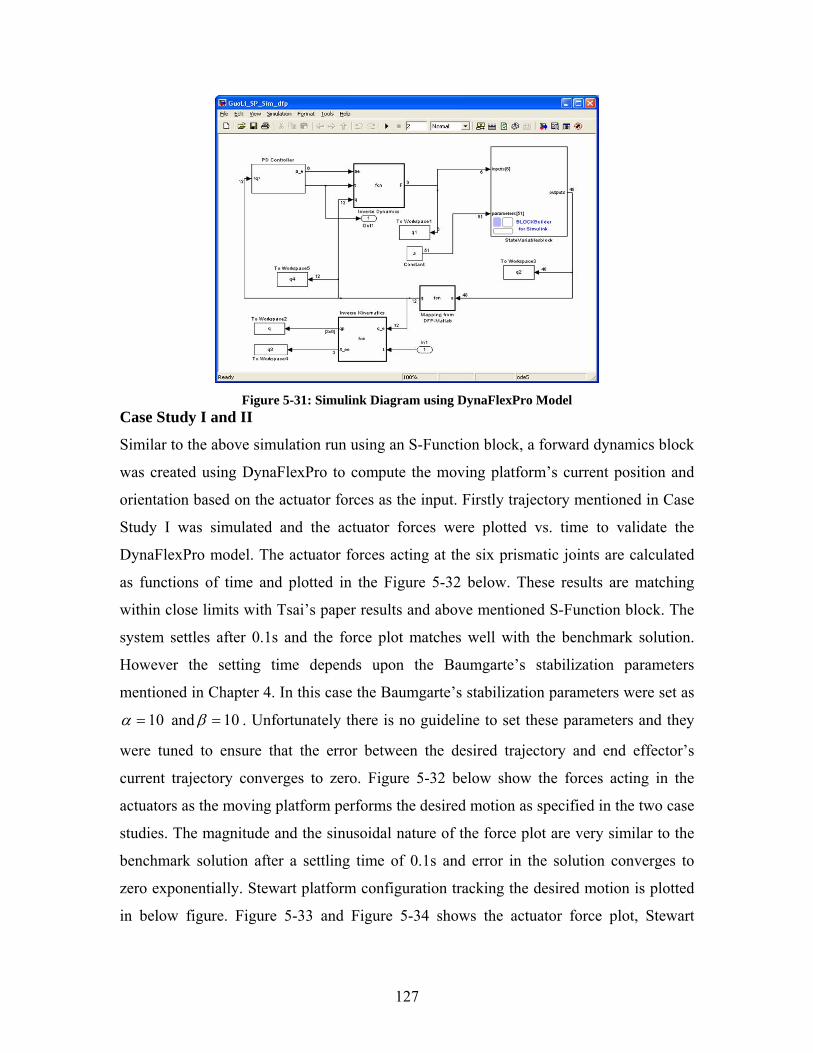
127
Figure 5-31: Simulink Diagram using DynaFlexPro Model
Case Study I and II
Similar to the above simulation run using an S-Function block, a forward dynamics block
was created using DynaFlexPro to compute the moving platform’s current position and
orientation based on the actuator forces as the input. Firstly trajectory mentioned in Case
Study I was simulated and the actuator forces were plotted vs. time to validate the
DynaFlexPro model. The actuator forces acting at the six prismatic joints are calculated
as functions of time and plotted in the Figure 5-32 below. These results are matching
within close limits with Tsai’s paper results and above mentioned S-Function block. The
system settles after 0.1s and the force plot matches well with the benchmark solution.
However the setting time depends upon the Baumgarte’s stabilization parameters
mentioned in Chapter 4. In this case the Baumgarte’s stabilization parameters were set as
10=α and 10=β . Unfortunately there is no guideline to set these parameters and they
were tuned to ensure that the error between the desired trajectory and end effector’s
current trajectory converges to zero. Figure 5-32 below show the forces acting in the
actuators as the moving platform performs the desired motion as specified in the two case
studies. The magnitude and the sinusoidal nature of the force plot are very similar to the
benchmark solution after a settling time of 0.1s and error in the solution converges to
zero exponentially. Stewart platform configuration tracking the desired motion is plotted
in below figure. Figure 5-33 and Figure 5-34 shows the actuator force plot, Stewart
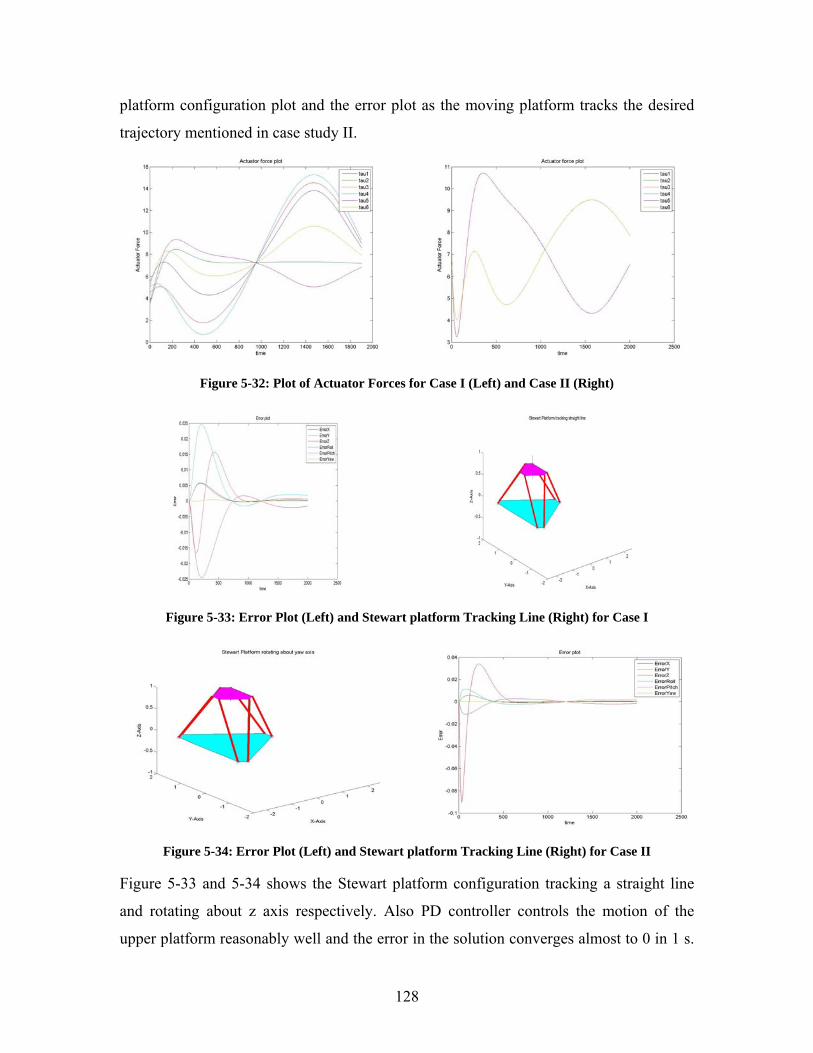
128
platform configuration plot and the error plot as the moving platform tracks the desired
trajectory mentioned in case study II.
Figure 5-32: Plot of Actuator Forces for Case I (Left) and Case II (Right)
Figure 5-33: Error Plot (Left) and Stewart platform Tracking Line (Right) for Case I
Figure 5-34: Error Plot (Left) and Stewart platform Tracking Line (Right) for Case II Figure 5-33 and 5-34 shows the Stewart platform configuration tracking a straight line
and rotating about z axis respectively. Also PD controller controls the motion of the
upper platform reasonably well and the error in the solution converges almost to 0 in 1 s.

129
Thus the forward and inverse dynamic analysis and PD control of 6DOF Stewart
platform type parallel manipulator has been performed using two above mentioned
methods and the results are matching well with the benchmark solutions provided by
Tsai. Also the motion controller has been implemented by tuning the gain factors
appropriately. Both the case studies have been evaluated to validate the S-Function block,
DynaFlexPro forward dynamics model and the Lagrangian formulation. In the
subsequent study a CAD model of the 6 DOF Stewart platform type parallel manipulator
will be built in SolidWorks and the above mentioned methods will be employed to
perform the inverse dynamic simulation and the motion control of the moving platform.
5.6 Simulation of the CAD Model of Stewart platform:
For this simulation, a CAD model of a 6Dof Stewart platform type manipulator has been
created in SolidWorks as shown in Figure 5-35. All the parts such as moving platform,
fixed platform, joints and actuators are assigned plain carbon steel material properties.
The dimensions of the upper and fixed platforms were parameterized based on radius of
the respective platforms. The length and the diameter of the actuator were modeled based
on the specifications of the Linmot linear motors. These linear motors are about 200 mm
long and have a diameter of 5mm. These actuators can produce forces close to 500N and
it is sufficient for the jaw motion simulation. To validate the S-Function block,
DynaFlexPro forward dynamics model and the Visual Nastran forward dynamics model,
a simple circular trajectory has been specified. The model has been imported into Visual
Nastran for forward dynamics simulation of the platform. In this simulation the center of
mass of the upper platform tracks a circle trajectory with its center at origin and radius of
20mm in the X-Z plane. Again all the simulations have been performed using three
methods for the same circular trajectory:
( )
( )
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+−
+−
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
000
sin152.0000589.0
cos02.000419.0
t
t
zyx
z
y
x
p
p
p
π
π
φφφ
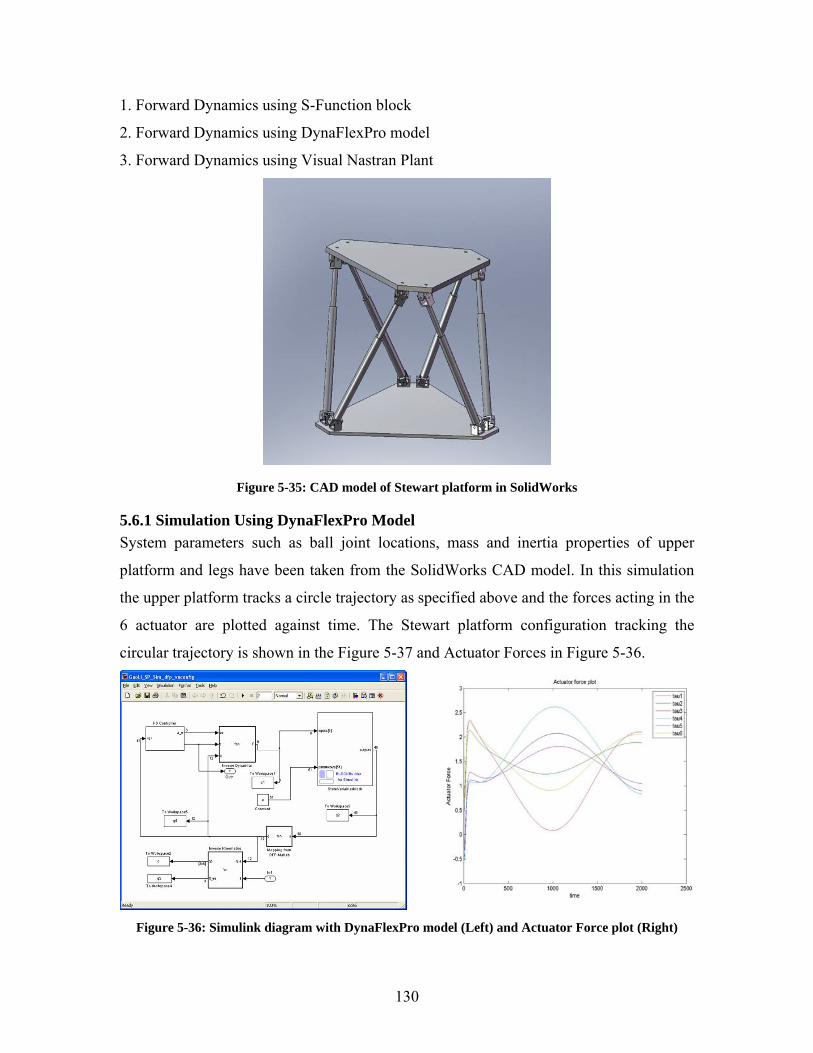
130
1. Forward Dynamics using S-Function block
2. Forward Dynamics using DynaFlexPro model
3. Forward Dynamics using Visual Nastran Plant
Figure 5-35: CAD model of Stewart platform in SolidWorks
5.6.1 Simulation Using DynaFlexPro Model System parameters such as ball joint locations, mass and inertia properties of upper
platform and legs have been taken from the SolidWorks CAD model. In this simulation
the upper platform tracks a circle trajectory as specified above and the forces acting in the
6 actuator are plotted against time. The Stewart platform configuration tracking the
circular trajectory is shown in the Figure 5-37 and Actuator Forces in Figure 5-36.
Figure 5-36: Simulink diagram with DynaFlexPro model (Left) and Actuator Force plot (Right)
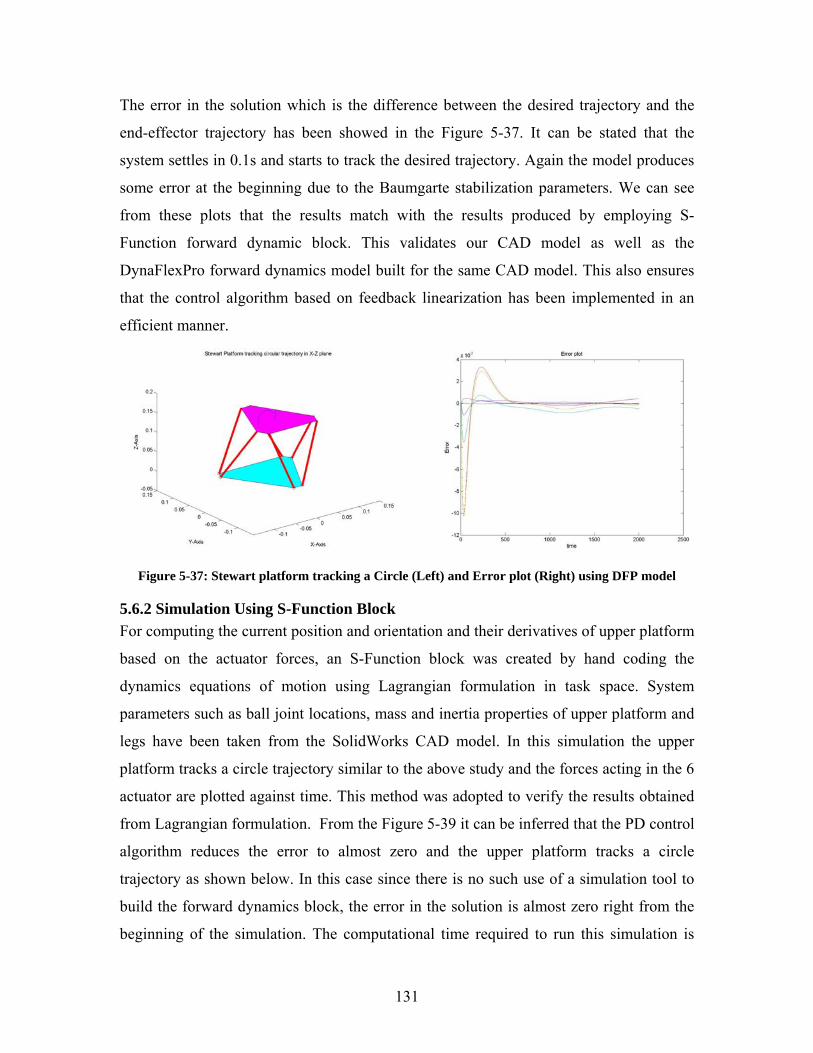
131
The error in the solution which is the difference between the desired trajectory and the
end-effector trajectory has been showed in the Figure 5-37. It can be stated that the
system settles in 0.1s and starts to track the desired trajectory. Again the model produces
some error at the beginning due to the Baumgarte stabilization parameters. We can see
from these plots that the results match with the results produced by employing S-
Function forward dynamic block. This validates our CAD model as well as the
DynaFlexPro forward dynamics model built for the same CAD model. This also ensures
that the control algorithm based on feedback linearization has been implemented in an
efficient manner.
Figure 5-37: Stewart platform tracking a Circle (Left) and Error plot (Right) using DFP model
5.6.2 Simulation Using S-Function Block For computing the current position and orientation and their derivatives of upper platform
based on the actuator forces, an S-Function block was created by hand coding the
dynamics equations of motion using Lagrangian formulation in task space. System
parameters such as ball joint locations, mass and inertia properties of upper platform and
legs have been taken from the SolidWorks CAD model. In this simulation the upper
platform tracks a circle trajectory similar to the above study and the forces acting in the 6
actuator are plotted against time. This method was adopted to verify the results obtained
from Lagrangian formulation. From the Figure 5-39 it can be inferred that the PD control
algorithm reduces the error to almost zero and the upper platform tracks a circle
trajectory as shown below. In this case since there is no such use of a simulation tool to
build the forward dynamics block, the error in the solution is almost zero right from the
beginning of the simulation. The computational time required to run this simulation is
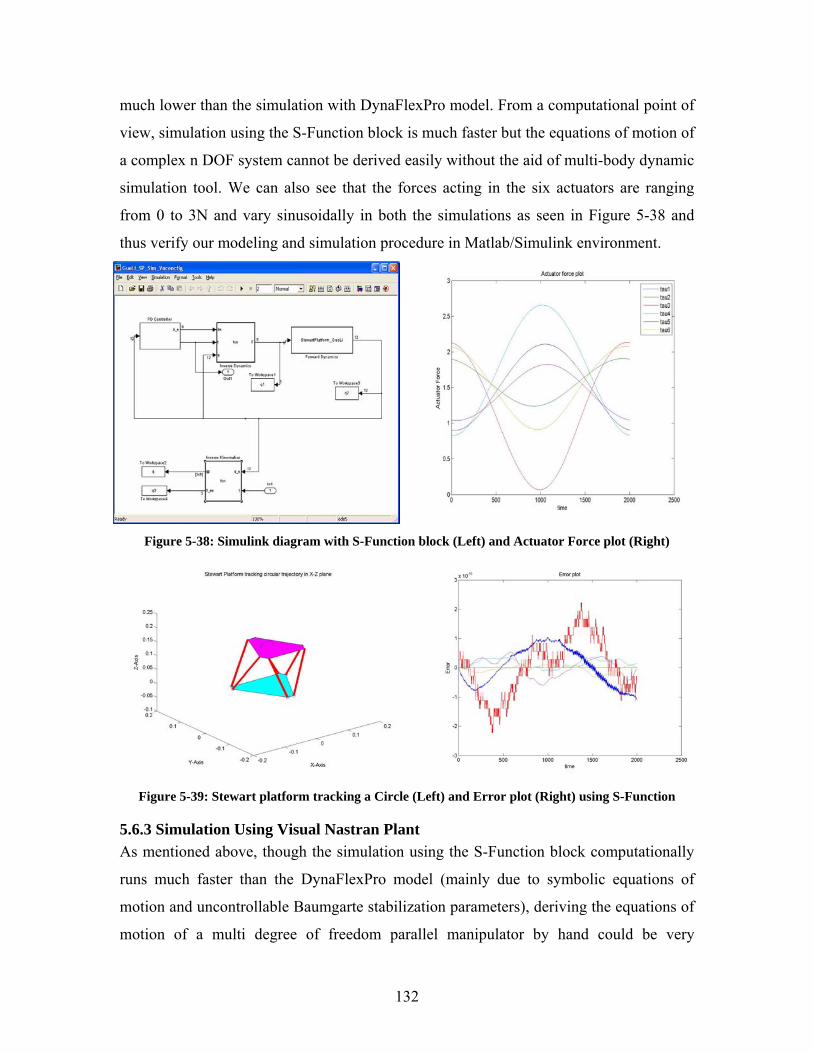
132
much lower than the simulation with DynaFlexPro model. From a computational point of
view, simulation using the S-Function block is much faster but the equations of motion of
a complex n DOF system cannot be derived easily without the aid of multi-body dynamic
simulation tool. We can also see that the forces acting in the six actuators are ranging
from 0 to 3N and vary sinusoidally in both the simulations as seen in Figure 5-38 and
thus verify our modeling and simulation procedure in Matlab/Simulink environment.
Figure 5-38: Simulink diagram with S-Function block (Left) and Actuator Force plot (Right)
Figure 5-39: Stewart platform tracking a Circle (Left) and Error plot (Right) using S-Function
5.6.3 Simulation Using Visual Nastran Plant As mentioned above, though the simulation using the S-Function block computationally
runs much faster than the DynaFlexPro model (mainly due to symbolic equations of
motion and uncontrollable Baumgarte stabilization parameters), deriving the equations of
motion of a multi degree of freedom parallel manipulator by hand could be very

133
laborious. At the same time, creating a model in DynaFlexPro needs a good knowledge of
the frames of reference, generalized co-ordinates for the initial modeling. DFP still does
not possess the conveniences that commercial-off-the-shelf packages offer in terms of
model creation and simulation. Features such as 3D visualization capabilities, automated
mass and inertial calculations (to name a few) are currently missing. Finally, while the
automated processing to create the EOMs has been adequately shielded from the user, the
user is expected to have a good grasp of Maple programming concepts and data-storage
constructs to effectively use the results. Hence in the next study, MSC Visual Nastran
was used to build the forward dynamics block. The best feature about this product is that
it can be integrated seamlessly with SolidWorks. Building a CAD model of a complex
system is much simpler than deriving its equation of motion or building a DFP model.
Once the CAD model is built it can be transferred seamlessly to the Visual Nastran tool
to create dynamic model. All the constraints were checked before running the simulation
and the Visual Nastran Plant of this CAD model was added to the Simulink control loop
to perform the forward dynamics. Similar simulation was performed using a forward
dynamics Visual Nastran plant for simulating the forward and inverse dynamic analysis
of Stewart platform. All these simulations were performed using Euler method or ODE1
solver at time step of 0.001s. The forces acting in the six prismatic actuators are plotted
against time in the Figure 5-40. Also the error in the solution converges to 0 pretty
quickly and the upper platform tracks the circle trajectory with minimal error in the
solution (Figure 5-41). However since the Visual Nastran solver does not have the
velocity and the acceleration information at the first time step and also the initial position
is little away from the desired trajectory, we see a larger actuator force to compensate for
the error in the solution. But the system settles at about 0.05s and the moving platform
tracks the desired circular trajectory. From above plots it can be inferred that the forward
and inverse dynamic simulation of Stewart platform type manipulator using these three
methods produces similar results and PD controller works well with suitable gain factors
to converge the error to zero for tracking desired motion. This also validates our forward
dynamics block created using commercial simulation tools such as DynaFlexPro and
Visual Nastran. Due to simplicity and ease of use we will be using only Visual Nastran
for determining the actuator forces as the moving platform reproduces the jaw motion of
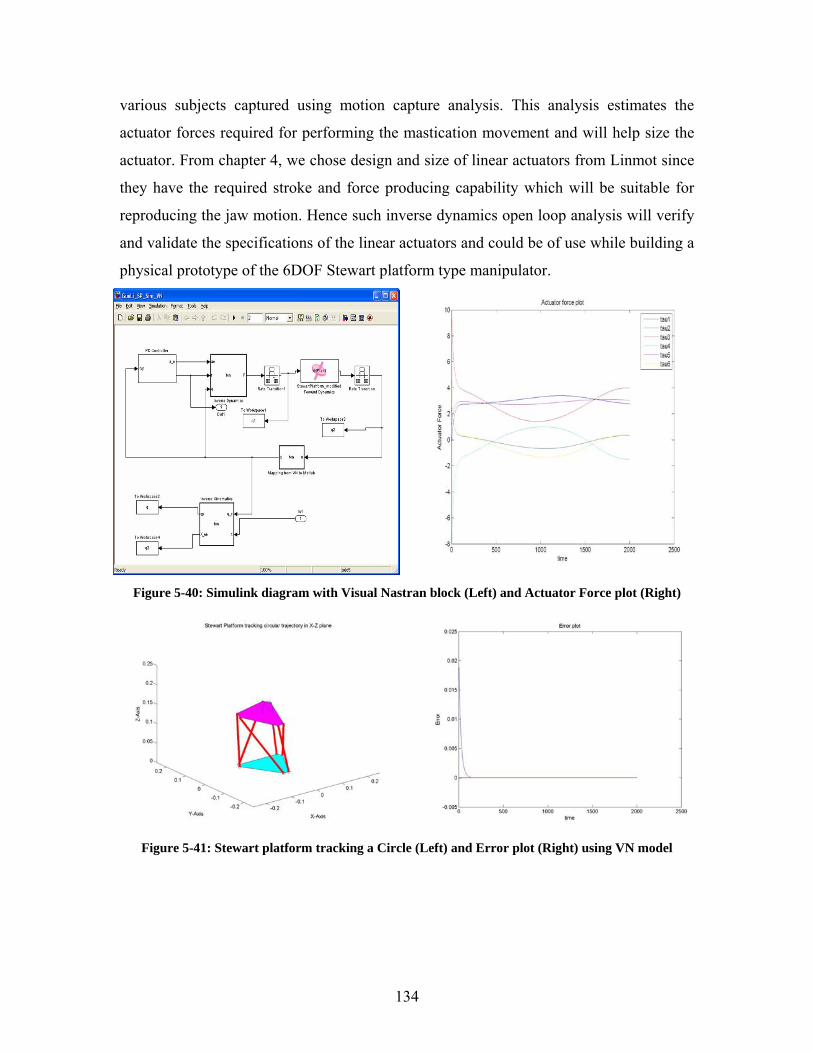
134
various subjects captured using motion capture analysis. This analysis estimates the
actuator forces required for performing the mastication movement and will help size the
actuator. From chapter 4, we chose design and size of linear actuators from Linmot since
they have the required stroke and force producing capability which will be suitable for
reproducing the jaw motion. Hence such inverse dynamics open loop analysis will verify
and validate the specifications of the linear actuators and could be of use while building a
physical prototype of the 6DOF Stewart platform type manipulator.
Figure 5-40: Simulink diagram with Visual Nastran block (Left) and Actuator Force plot (Right)
Figure 5-41: Stewart platform tracking a Circle (Left) and Error plot (Right) using VN model
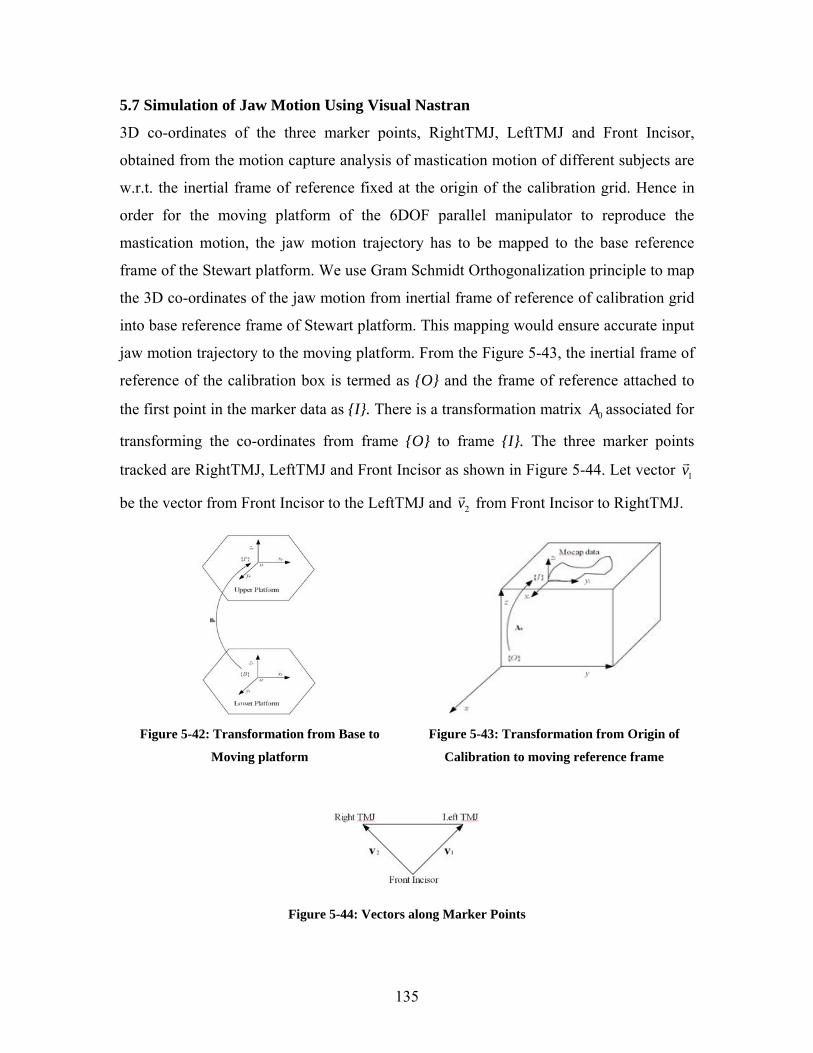
135
5.7 Simulation of Jaw Motion Using Visual Nastran
3D co-ordinates of the three marker points, RightTMJ, LeftTMJ and Front Incisor,
obtained from the motion capture analysis of mastication motion of different subjects are
w.r.t. the inertial frame of reference fixed at the origin of the calibration grid. Hence in
order for the moving platform of the 6DOF parallel manipulator to reproduce the
mastication motion, the jaw motion trajectory has to be mapped to the base reference
frame of the Stewart platform. We use Gram Schmidt Orthogonalization principle to map
the 3D co-ordinates of the jaw motion from inertial frame of reference of calibration grid
into base reference frame of Stewart platform. This mapping would ensure accurate input
jaw motion trajectory to the moving platform. From the Figure 5-43, the inertial frame of
reference of the calibration box is termed as {O} and the frame of reference attached to
the first point in the marker data as {I}. There is a transformation matrix 0A associated for
transforming the co-ordinates from frame {O} to frame {I}. The three marker points
tracked are RightTMJ, LeftTMJ and Front Incisor as shown in Figure 5-44. Let vector 1v
be the vector from Front Incisor to the LeftTMJ and 2v from Front Incisor to RightTMJ.
Figure 5-42: Transformation from Base to
Moving platform
Figure 5-43: Transformation from Origin of
Calibration to moving reference frame
Figure 5-44: Vectors along Marker Points

136
The unit vectors along these vectors can be computed as
11
1
vev
= (1)
1 23
1 2
ˆ v vev v×
=×
(2)
2 3 1ˆ ˆ ˆe e e= × (3)
Hence the Rotation matrix is given by
[ ]1 2 3ˆ ˆ ˆIOR e e e= (4)
The homogenous transformation matrix 0A is given as
11 12 13
21 22 230
31 32 33
0 0 0 1
x
y
z
r r r dr r r d
Ar r r d
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
(5)
Similarly the transformation matrix ( )A t can be found to transform the co-ordinates of
each point in the marker dataset as a function of time. Then the relative transformation
matrix ( )rA t is defined as the transformation of each point in the trajectory data with the
first point of the motion capture data and written as
( ) ( )10rA t A A t−= (6)
Similarly the transformation matrix 0B is defined as the transformation between base
reference frame { }B of Stewart platform and platform reference frame { }P and is
derived in the Chapter 3 and shown in Figure 5-42. Now the overall homogenous
transformation matrix to map the 3D co-ordinates of the motion capture data with respect
to base reference frame is given as
( ) ( )0 rB t B A t= (7)
5.7.1 Dynamic Simulation of First Human Subject Jaw motion
Motion capture analysis was performed to measure the 3D co-ordinates of the Front
Incisor point on the mandible during mastication cycle. This data served as the input
trajectory for performing inverse dynamic analysis of the 6DOF Stewart platform using
Matlab/Simulink and Visual Nastran. Four different subjects, two male human, one dog
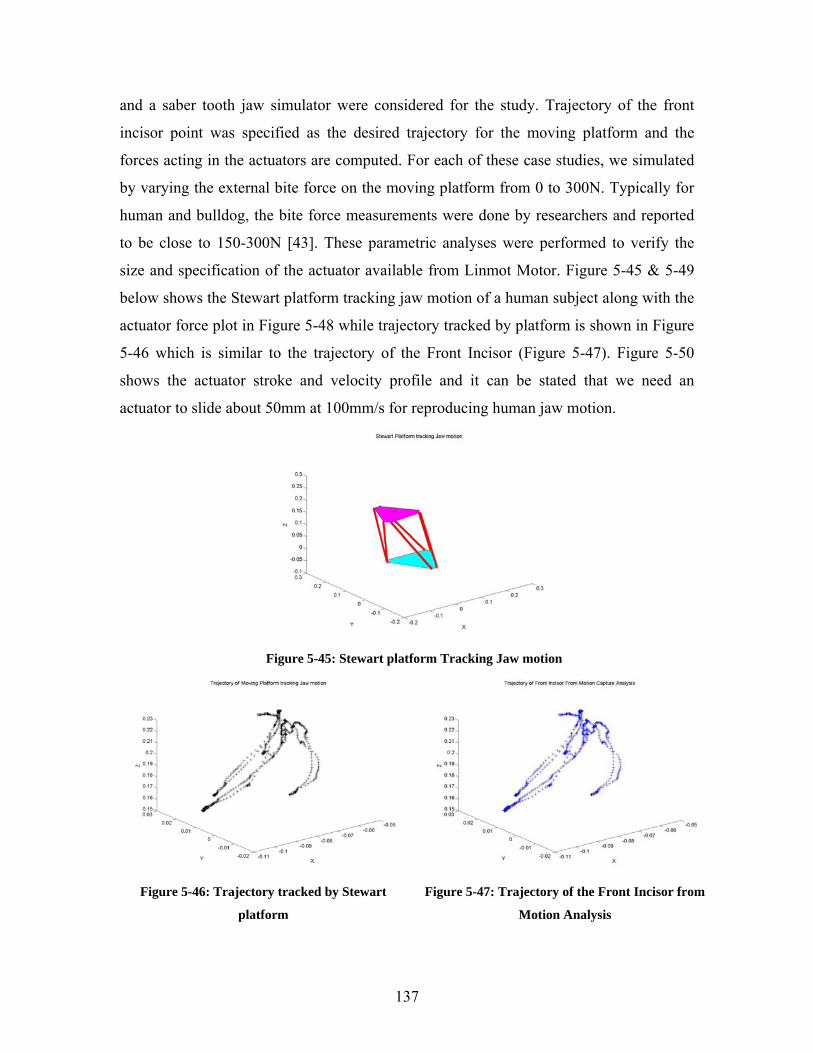
137
and a saber tooth jaw simulator were considered for the study. Trajectory of the front
incisor point was specified as the desired trajectory for the moving platform and the
forces acting in the actuators are computed. For each of these case studies, we simulated
by varying the external bite force on the moving platform from 0 to 300N. Typically for
human and bulldog, the bite force measurements were done by researchers and reported
to be close to 150-300N [43]. These parametric analyses were performed to verify the
size and specification of the actuator available from Linmot Motor. Figure 5-45 & 5-49
below shows the Stewart platform tracking jaw motion of a human subject along with the
actuator force plot in Figure 5-48 while trajectory tracked by platform is shown in Figure
5-46 which is similar to the trajectory of the Front Incisor (Figure 5-47). Figure 5-50
shows the actuator stroke and velocity profile and it can be stated that we need an
actuator to slide about 50mm at 100mm/s for reproducing human jaw motion.
Figure 5-45: Stewart platform Tracking Jaw motion
Figure 5-46: Trajectory tracked by Stewart
platform
Figure 5-47: Trajectory of the Front Incisor from
Motion Analysis
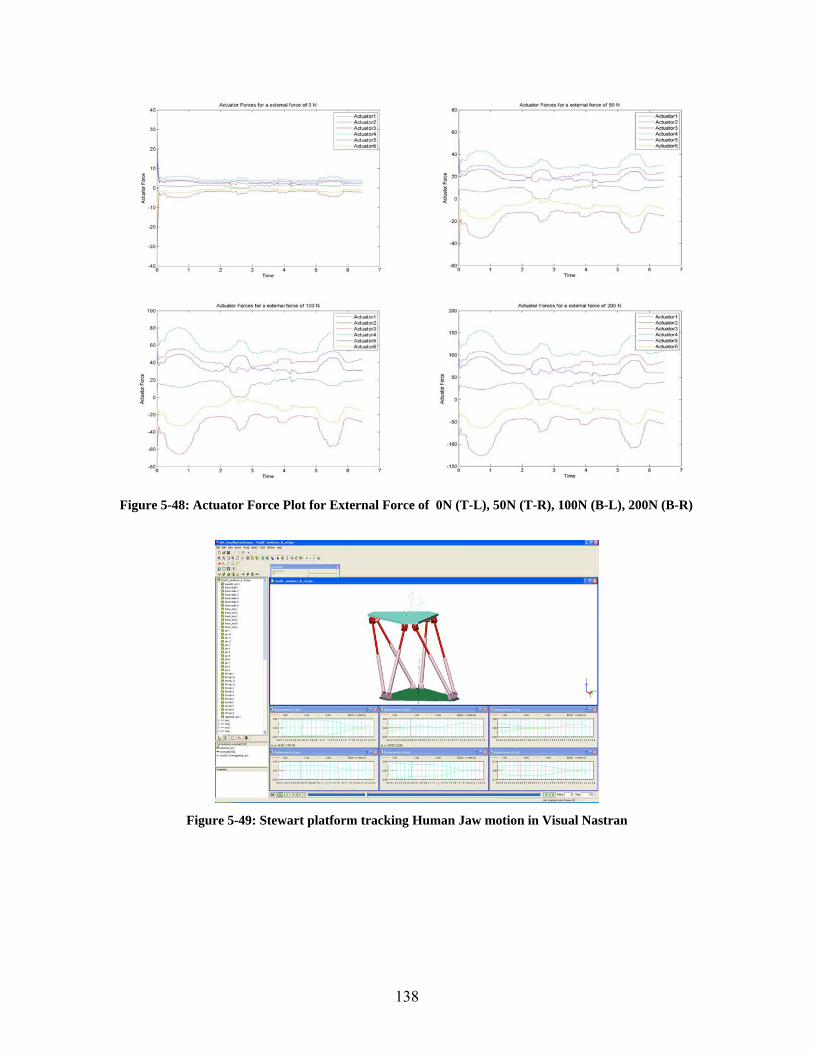
138
Figure 5-48: Actuator Force Plot for External Force of 0N (T-L), 50N (T-R), 100N (B-L), 200N (B-R)
Figure 5-49: Stewart platform tracking Human Jaw motion in Visual Nastran
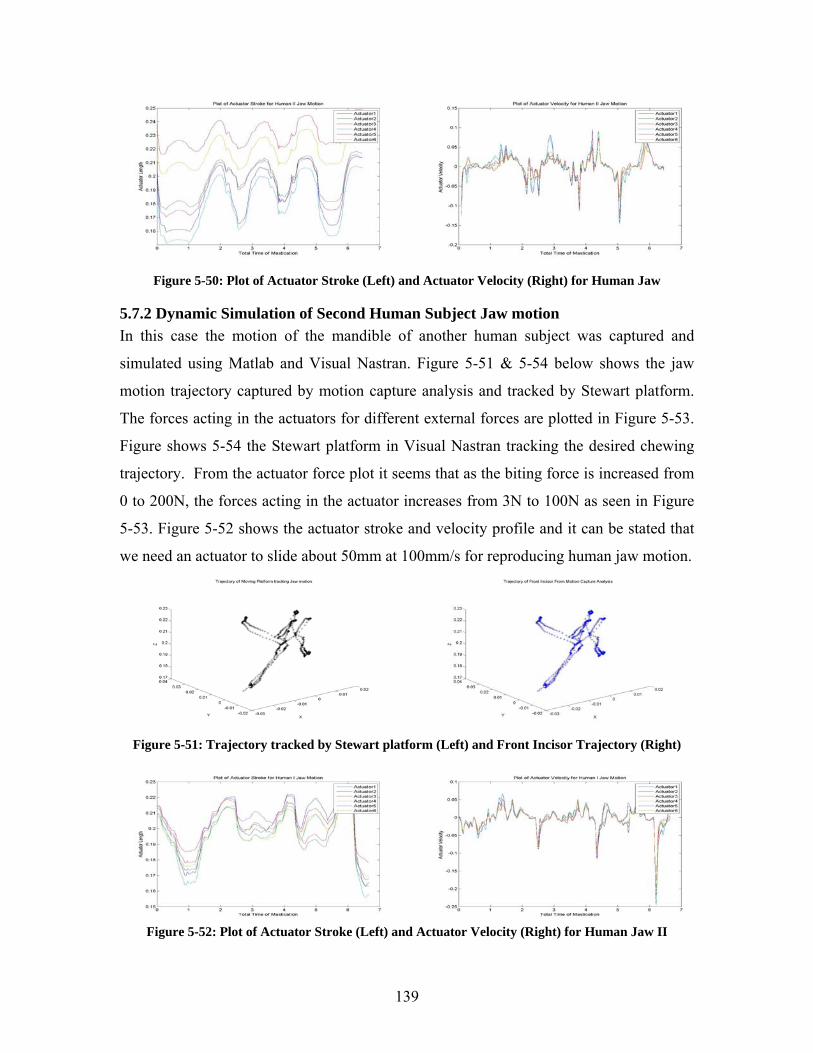
139
Figure 5-50: Plot of Actuator Stroke (Left) and Actuator Velocity (Right) for Human Jaw
5.7.2 Dynamic Simulation of Second Human Subject Jaw motion In this case the motion of the mandible of another human subject was captured and
simulated using Matlab and Visual Nastran. Figure 5-51 & 5-54 below shows the jaw
motion trajectory captured by motion capture analysis and tracked by Stewart platform.
The forces acting in the actuators for different external forces are plotted in Figure 5-53.
Figure shows 5-54 the Stewart platform in Visual Nastran tracking the desired chewing
trajectory. From the actuator force plot it seems that as the biting force is increased from
0 to 200N, the forces acting in the actuator increases from 3N to 100N as seen in Figure
5-53. Figure 5-52 shows the actuator stroke and velocity profile and it can be stated that
we need an actuator to slide about 50mm at 100mm/s for reproducing human jaw motion.
Figure 5-51: Trajectory tracked by Stewart platform (Left) and Front Incisor Trajectory (Right)
Figure 5-52: Plot of Actuator Stroke (Left) and Actuator Velocity (Right) for Human Jaw II
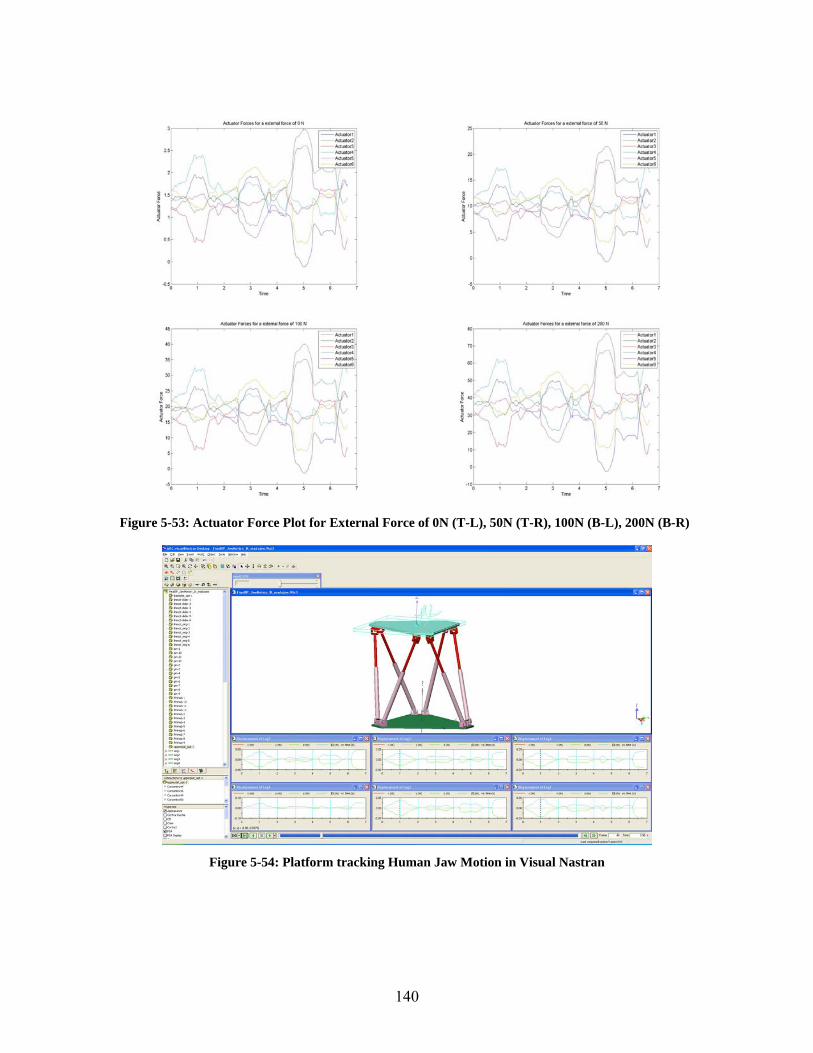
140
Figure 5-53: Actuator Force Plot for External Force of 0N (T-L), 50N (T-R), 100N (B-L), 200N (B-R)
Figure 5-54: Platform tracking Human Jaw Motion in Visual Nastran
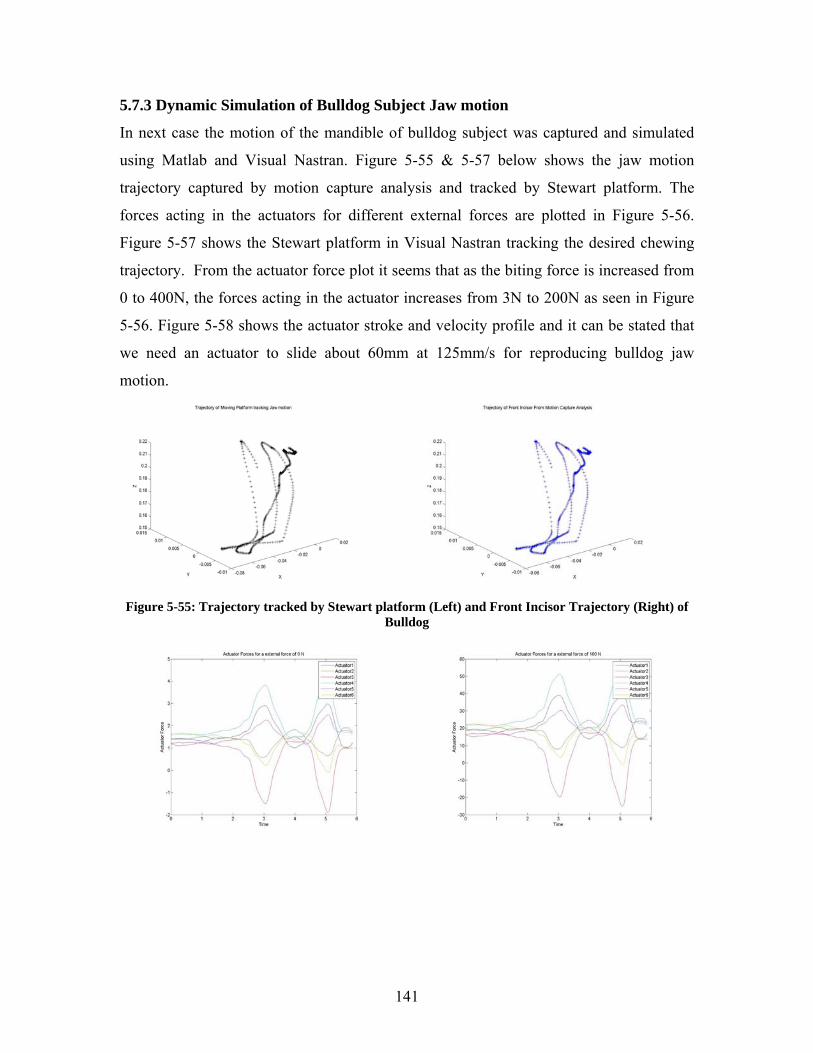
141
5.7.3 Dynamic Simulation of Bulldog Subject Jaw motion
In next case the motion of the mandible of bulldog subject was captured and simulated
using Matlab and Visual Nastran. Figure 5-55 & 5-57 below shows the jaw motion
trajectory captured by motion capture analysis and tracked by Stewart platform. The
forces acting in the actuators for different external forces are plotted in Figure 5-56.
Figure 5-57 shows the Stewart platform in Visual Nastran tracking the desired chewing
trajectory. From the actuator force plot it seems that as the biting force is increased from
0 to 400N, the forces acting in the actuator increases from 3N to 200N as seen in Figure
5-56. Figure 5-58 shows the actuator stroke and velocity profile and it can be stated that
we need an actuator to slide about 60mm at 125mm/s for reproducing bulldog jaw
motion.
Figure 5-55: Trajectory tracked by Stewart platform (Left) and Front Incisor Trajectory (Right) of
Bulldog
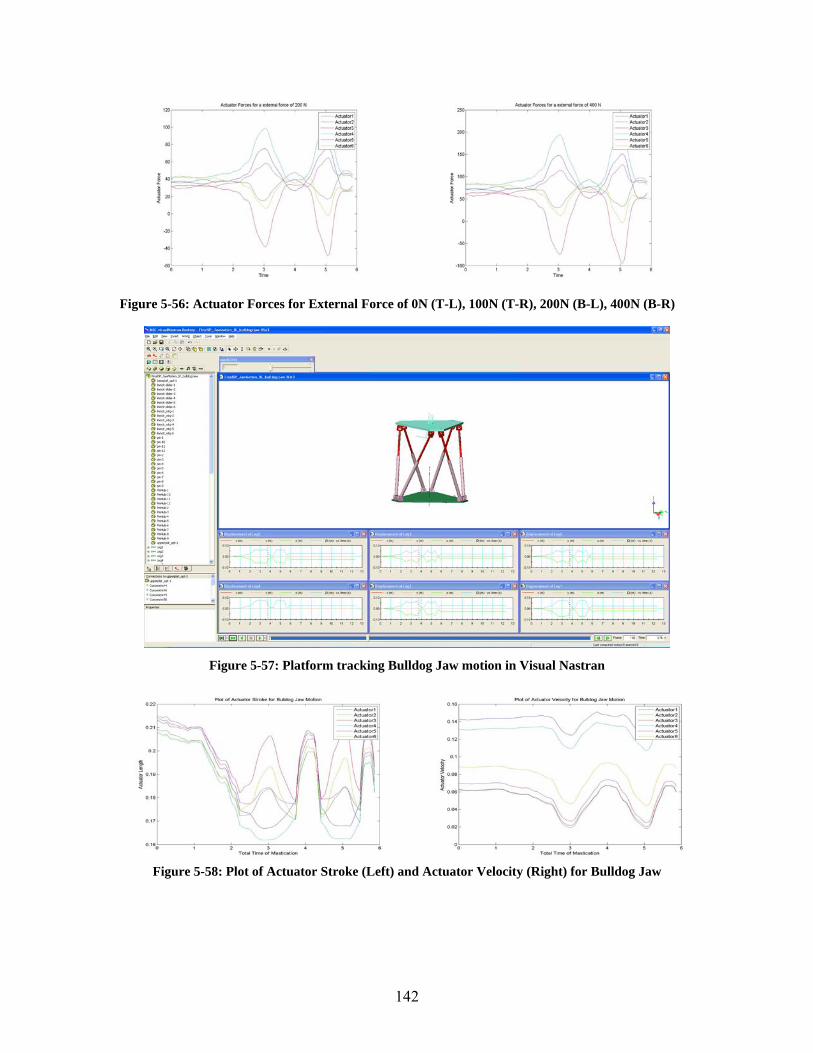
142
Figure 5-56: Actuator Forces for External Force of 0N (T-L), 100N (T-R), 200N (B-L), 400N (B-R)
Figure 5-57: Platform tracking Bulldog Jaw motion in Visual Nastran
Figure 5-58: Plot of Actuator Stroke (Left) and Actuator Velocity (Right) for Bulldog Jaw
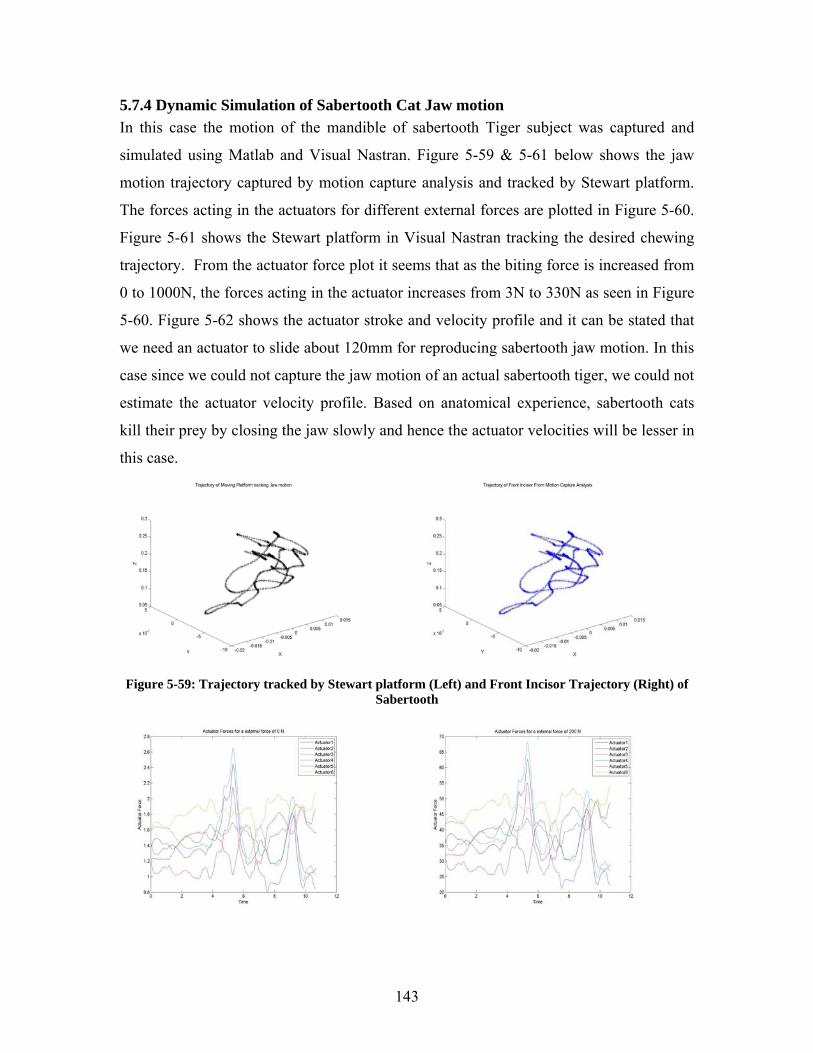
143
5.7.4 Dynamic Simulation of Sabertooth Cat Jaw motion In this case the motion of the mandible of sabertooth Tiger subject was captured and
simulated using Matlab and Visual Nastran. Figure 5-59 & 5-61 below shows the jaw
motion trajectory captured by motion capture analysis and tracked by Stewart platform.
The forces acting in the actuators for different external forces are plotted in Figure 5-60.
Figure 5-61 shows the Stewart platform in Visual Nastran tracking the desired chewing
trajectory. From the actuator force plot it seems that as the biting force is increased from
0 to 1000N, the forces acting in the actuator increases from 3N to 330N as seen in Figure
5-60. Figure 5-62 shows the actuator stroke and velocity profile and it can be stated that
we need an actuator to slide about 120mm for reproducing sabertooth jaw motion. In this
case since we could not capture the jaw motion of an actual sabertooth tiger, we could not
estimate the actuator velocity profile. Based on anatomical experience, sabertooth cats
kill their prey by closing the jaw slowly and hence the actuator velocities will be lesser in
this case.
Figure 5-59: Trajectory tracked by Stewart platform (Left) and Front Incisor Trajectory (Right) of
Sabertooth
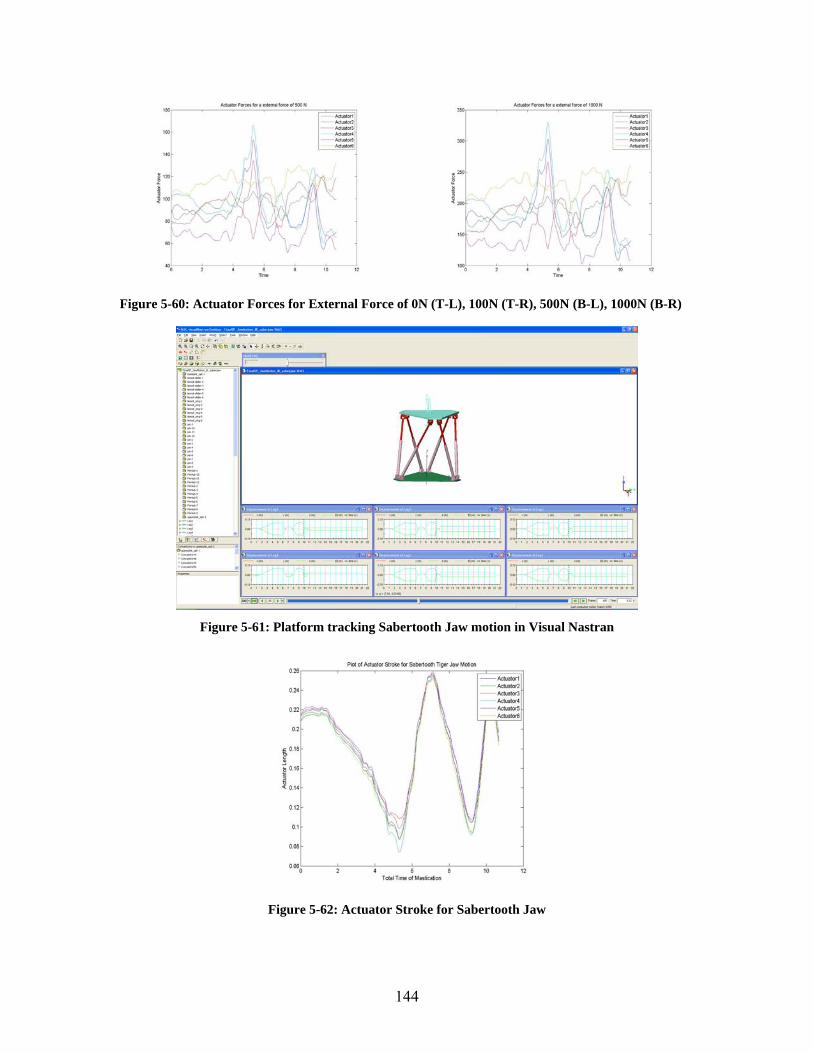
144
Figure 5-60: Actuator Forces for External Force of 0N (T-L), 100N (T-R), 500N (B-L), 1000N (B-R)
Figure 5-61: Platform tracking Sabertooth Jaw motion in Visual Nastran
Figure 5-62: Actuator Stroke for Sabertooth Jaw

145
6. Conclusion and Future Work
6.1 Conclusion
The primary goal of this project to use Virtual Prototyping tools to estimate:
1. Force acting in the actuators as the Stewart platform is reproducing the
mastication motion of vertebrates.
2. Muscle Forces and TMJ reaction Forces as the musculoskeletal model of
vertebrate jaw is performing mastication motion.
Although prior work has been done in developing human jaw motion simulators, no work
was done in reproducing the mastication motion of animals. And these human jaw motion
simulators were built for specific patient. Hence in this thesis work, we modeled and
simulated a more generic 6DOF parallel manipulator i.e. Stewart platform for
reproducing the jaw motion of vertebrates. The other reason for simulating a Stewart
platform was that there is no size limitation on the actuators as the skull and mandible
will be mounted on top of the moving platform. For achieving the first task, a CAD
model of the Stewart platform was developed in SolidWorks. Before building the CAD
model, workspace analysis was performed to measure various measures of manipulability
and its dependence on parameters such as radius of the upper platform and the length of
the actuators. These two parameters were then determined for attaining the best
workspace in the context of reproducing jaw motion. Then the inverse dynamics of the
Stewart platform was formulated based on the Lagrangian and Newton Euler Method.
The Jacobian matrix of the 6DOF parallel manipulator was derived as described in
Chapter 3. Initially to verify the inverse dynamic code, the inverse-forward dynamics
simulation was implemented using an S-Function block and a DynaFlexPro forward
dynamics model and the results were compared with the benchmark solutions for specific
case studies provided by Tsai. Feedback linearization was successfully implemented to
verify that the moving platform tracks the desired trajectory with the error converging to
zero. Then the motion capture analysis of different subjects including humans was
performed to determine the 3D trajectory of the front incisor on the mandible. This
trajectory was then used as the input trajectory for the inverse dynamic simulation of the
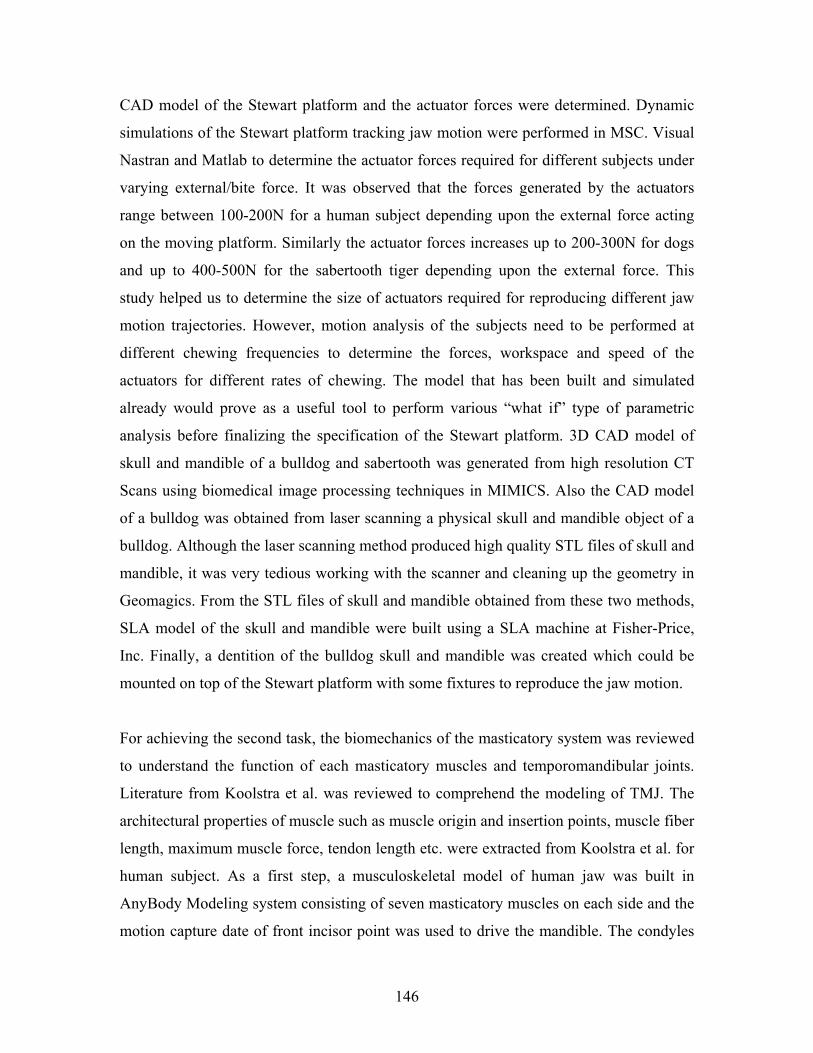
146
CAD model of the Stewart platform and the actuator forces were determined. Dynamic
simulations of the Stewart platform tracking jaw motion were performed in MSC. Visual
Nastran and Matlab to determine the actuator forces required for different subjects under
varying external/bite force. It was observed that the forces generated by the actuators
range between 100-200N for a human subject depending upon the external force acting
on the moving platform. Similarly the actuator forces increases up to 200-300N for dogs
and up to 400-500N for the sabertooth tiger depending upon the external force. This
study helped us to determine the size of actuators required for reproducing different jaw
motion trajectories. However, motion analysis of the subjects need to be performed at
different chewing frequencies to determine the forces, workspace and speed of the
actuators for different rates of chewing. The model that has been built and simulated
already would prove as a useful tool to perform various “what if” type of parametric
analysis before finalizing the specification of the Stewart platform. 3D CAD model of
skull and mandible of a bulldog and sabertooth was generated from high resolution CT
Scans using biomedical image processing techniques in MIMICS. Also the CAD model
of a bulldog was obtained from laser scanning a physical skull and mandible object of a
bulldog. Although the laser scanning method produced high quality STL files of skull and
mandible, it was very tedious working with the scanner and cleaning up the geometry in
Geomagics. From the STL files of skull and mandible obtained from these two methods,
SLA model of the skull and mandible were built using a SLA machine at Fisher-Price,
Inc. Finally, a dentition of the bulldog skull and mandible was created which could be
mounted on top of the Stewart platform with some fixtures to reproduce the jaw motion.
For achieving the second task, the biomechanics of the masticatory system was reviewed
to understand the function of each masticatory muscles and temporomandibular joints.
Literature from Koolstra et al. was reviewed to comprehend the modeling of TMJ. The
architectural properties of muscle such as muscle origin and insertion points, muscle fiber
length, maximum muscle force, tendon length etc. were extracted from Koolstra et al. for
human subject. As a first step, a musculoskeletal model of human jaw was built in
AnyBody Modeling system consisting of seven masticatory muscles on each side and the
motion capture date of front incisor point was used to drive the mandible. The condyles

147
were constrained to be in touch with the fossa and the sideways movement of one of the
TMJs was constrained. Muscle forces required to perform such desired jaw motion under
varying bite force were plotted. The modeling procedure was verified by comparing the
muscle activities plot with the one created by Mark De Zee et al. It was decided to model
the muscles as Hill type muscle models and model the temporalis muscles as set of three
vectors for producing more realistic results. The work was then extended to create a
musculoskeletal model of bulldog jaw and sabertooth cat jaw. In this case, the
architectural properties of the muscle were obtained from dissection of the dog head
muscles. Muscle mass were obtained from Turnbull book to determine the muscle
volume. STL files of the skull and mandible of both the animals were imported into
AnyBody for visualization and verification of muscle attachment points. Motion capture
data of the front incisor was used to drive the mandible and muscle forces and TMJ
reaction forces were determined for different bite force simulation. It was observed that
the muscle forces, TMJ reaction forces and muscle activities increases with increase in
bite force. Also the lateral pterygoid and the digastrics perform most of the work upfront
in opening the jaw, whereas the other masticatory muscles contribute little in terms of
muscle activities. In this way, a musculoskeletal model of the vertebrate jaw was built
and is designed to perform various other “what if” type parametric analyses to test
various hypothesis. Reproduction of the mastication motion of a vertebrate with a robotic
device enabled us to estimate muscle and bite forces required for different animals while
chewing/biting different regimen and relate them analyze masticatory muscle recruitment
patterns and performance and will be used to quantitatively evaluate the dynamic
breakdown of foods during chewing in the future, which is vital information required in
the development of new pet foods.
6.2 Future work
1. Sophisticated Dissection:
Dissection of the Masticatory muscles must be performed in a sophisticated
manner using 3D digitizer, laser diffraction techniques to measure the
architectural muscle parameters accurately. Also the dataset should be estimated
for specific subject for the sake of consistency.
148
2. Accurate Motion Capture Analysis:
A more sophisticated fixture should be designed to restrain the animal subject
from moving its head while performing mastication. This ensures consistent
motion capture data without loss of information in between the cycle.
3. Bite Force Measurement:
Instead of simulating chewing force, force transducers should be used to measure
the biting force while chewing different regimen. This force could then be applied
as the external force to the Stewart platform and musculoskeletal jaw model.
4. EMG measurements for validation:
Electromyography measurements of the masticatory muscles of animal subjects
must be measured during the mastication cycle. The actual muscle activities
obtained from virtual prototyping could then be compared with the experimental
EMG measurements to validate the musculoskeletal model in AnyBody.
5. Frequency of Mastication:
Since the frequency of chewing affects the speed at which actuators move or the
muscle forces required to move the mandible along desired trajectory, we need to
measure the motion capture data at different known frequencies based on the type
of regimen being chewed.
6. Physical Prototyping
Finally we need to build a 6DOF parallel manipulator and perform real time
control using Matlab Simulink xPC toolbox. The platform needs to be tested for
biting different regimens to measure the food breakdowns and masticatory
performance and forces in the actuators using force sensors.
149
Bibliography
1. M.J. Delsignore, “A Screw -Theoretic Framework for Musculoskeletal System
Modeling and Analysis”, Department of Mechanical & Aerospace Engineering.
Buffalo, State University of New York at Buffalo, Master of Science, 2005
2. K.S. Konakanchi, “Musculoskeletal modeling of Smilodon Fatalis for Virtual
Functional Performance Testing”, Department of Mechanical & Aerospace
Engineering. Buffalo, State University of New York at Buffalo, Master of
Science, 2005
3. M. Narayanan, S. Kannan, L-F. Lee, V. Krovi, and F. Mendel, “Virtual
Musculoskeletal Scenario-Testing Case-Studies”. Proceedings of 2008 Virtual
Rehabilitation, Vancouver, Canada, 2008.
4. G.G.Wang, "Definition and Review of Virtual Prototyping", Journal of
Computing and Information Science in Engineering 2(3): 232-236, 2002.
5. V. Krovi, V. Kumar, G.K. Ananthasuresh, and J.M. Vezien, "Design and Virtual
Prototyping of Rehabilitation Aids", ASME Journal of Mechanical Design
121(3): 456-458, 1999.
6. B. May, S. Saha, M. Saltzman, "A three dimensional mathematical model of
temporomandibular joint loading." Clinical Biomechanics 16: 489-495, 2001.
7. J.H. Koolstra, T.M. Van Eijden, W.A. Weijs and M. Naeije, "A Three
Dimensional Mathematical Model of the human Masticatory System Predicting
the Maximum possible Bite Forces." Journal of Biomechanics 21(7): 563-576,
1988.
150
8. J.H. Koolstra, T.M. Van Eijden, "Three-dimensional dynamical capabilities of the
human masticatory muscles." Journal of Biomechanics 32(2): 145-152, 1999.
9. J.H. Koolstra, T.M. Van Eijden, "Combined finite-element and rigid-body
analysis of human jaw joint dynamics." Journal of Biomechanics 38(12): 2431-
2439, 2005.
10. J.H. Koolstra, "Dynamics of the human Masticatory System." Critical reviews in
oral biology and medicine 13(4): 366-376, 2002.
11. T. Goldmann, L. Himmlova, “Usage of Motion Analysis for describing the
trajectory of the human Mandible in 3D”.
12. T.M. Barker, W. J. Earwaker, N. Frost, G. Wakeley, "Integration of 3-D medical
imaging and rapid prototyping to create stereolithographic models." Australas
Phys Eng Sci Med. 16(2): 79-85, 1993.
13. S. Lohfeld, P. Mchugh, D. Serban, D. Boyle, G. O'Donnell, N. Peckitt,
"Engineering Assisted Surgery™: A route for digital design and manufacturing of
customised maxillofacial implants." Journal of Materials Processing Technology
183(2-3): 333-338, 2007.
14. S. Singare, L. Dichen, L. Bingheng, L. Yanpu, G. Zhenyu, L. Yaxiong, "Design
and fabrication of custom mandible titanium tray based on rapid prototyping."
Medical Engineering & Physics 26(8): 671-676, 2004.
15. R. Enciso, A. Memon, D.A. Fidaleo, U. Neumann, J. Mah, "The virtual
craniofacial patient: 3D jaw modeling and animation." Stud Health technol
Inform. 94: 65-71, 2003.
151
16. N. Inou, M. Koseki, S. Sato, H. Kimura and K. Maki, “Development of Patient-
specific Display System of the human Mandibular Movements”.
17. Y. Otake, N. Suzuki, A. Hattori, Y. Shigeta, T. Ogawa, S. Fukushima, K.
Kobayashi, A. Uchiyama, "Real-time mandibular movement analysis system
using four-dimensional cranial bone model." Systems and Computers in Japan
37(8): 1-12, 2006.
18. B. Daumas, W. L. Xu, J. Bronlund, "Jaw mechanism modeling and simulation."
Mechanism and Machine Theory 40(7): 821-833, 2005.
19. D. Lewis, “A robotic chewing device for food evaluation”, Palmerston North,
NewZealand, Massey University. Master of Engineering in Mechatronics, 2006.
20. W.L. Xu, D. Lewis, J.E. Bronlund, M.P. Morgenstern, "Mechanism, design and
motion control of a linkage chewing device for food evaluation." Mechanism and
Machine Theory 43: 376-389, 2008.
21. W.L. Xu, J.E. Bronlund, and J. Kieser, “A Robotic Model of the human
Masticatory System for Reproducing Chewing Behaviors”, IEEE Robotics &
Automation Magazine, 2005.
22. W.L. Xu, "Review of the human masticatory system and masticatory robotics."
Mechanism and Machine Theory doi:10.1016/j.mechmachtheory.2008.06.003,
2008.
23. W. L. Xu, J. D. Torrance, B.Q. Chen, J. Potgieter, J.E. Bronlund, and J.S. Pap,
"Kinematics and Experiments of a Life-Sized Masticatory Robot for
Characterizing Food Texture." IEEE Transactions on Industrial Electronics 55(5),
2008.
152
24. J. Torrance, J. S. Pap, W.L. Xu, J. Bronlund, K.D. Foster, “Motion control of a
chewing robot of 6 RSS parallel mechanism”, 284 Proceedings of International
Conference on Autonomous Robotics and Agents. Palmerston North, New
Zealand. 13: 593-598, 2006.
25. H. Takanobu, A. Takanishi, D. Ozawa, K. Ohtsuki, M. Ohnishi, A. Okino,
“Integrated Dental Robot System for Mouth Opening and Closing Training”,
Proceedings of the 2002 IEEE International Conference on Robotics
&Automation, vol. 2, pp 1428-1433, Washington, DC, 2002.
26. T. Hayashi, S. Kato, S. Yamada, S. Nakajima, Y. Yamada, and H. Kobayashi, “A
Physiological Control of Chewing-Like Jaw Movement for Robotized Jaw
Simulator JSN/2A”, Proceedings of the 22nd Annual EMBS International
Conference, Chicago, IL, 2000.
27. H. Takanobu, A. Takanishi, I. Kato, “Design of a Mastication Robot Mechanism
using a human Skull Model”, Proceedings of the 1993 IEEE/RSJ International
Conference on Intelligent Robots and Systems, 1, pp 203-208, Yokohama, Japan,
1993.
28. H. Takanobu, N. Kuchiki, A. Takanishil, “Control of rapid closing motion of a
robot jaw using nonlinear spring mechanism”, Proceedings of the International
Conference on Intelligent Robots and Systems, 1, pp 372-377, 1995.
29. H. Takanobu, A. Takanishi, I. Kate, “Control of a Mastication Robot for
Reduction of Jaw Joint Force Focusing on Musculus temporalis”, Intelligent
Robots and Systems '94. 'Advanced Robotic Systems and the Real World', IROS
'94. Proceedings of the IEEE/RSJ/GI International Conference, 3, pp 1824-1831,
1994.
153
30. H.U. Takanobu, A. Takanishi, “Dental robotics and human model”. Proceedings
of the 1st International IEEE EMBS Conference on Neural Engineering, Capri
Island, Italy, pp 671-674, 2003.
31. “http://www.takanishi.mech.waseda.ac.jp/research/jaws/index.htm”, WY Series
32. K. Alemzadeh, R. A. Hyde, J. Gao, "Prototyping a robotic dental testing
simulator." Proceedings of the Institution of Mechanical Engineers. Part H,
Journal of Engineering in Medicine 221(4): 385-396, 2007.
33. H.B. Guo, H.R. Li, "Dynamic analysis and simulation of a six degree of freedom
Stewart platform manipulator." Proceedings of the Institution of Mechanical
Engineers, Part C: Journal of Mechanical Engineering Science 220(1), 2006.
34. C.P. Tang, “Manipulability-Based Analysis for Payload Transport by Robot
Collectives”, Department of Mechanical & Aerospace Engineering. Buffalo, State
University of New York at Buffalo, Master of Science, 2004.
35. L.W. Tsai, "Solving the Inverse Dynamics of a Stewart-Gough Manipulator by
the Principle of Virtual Work." Journal of Mechanical Design 122(1): pp. 3-9,
2000.
36. K. Yu, “Simultaneous Trajectory Tracking and Stiffness Control of Cable Driven
Parallel Manipulator”, Department of Mechanical & Aerospace Engineering.
Buffalo, State University of New York at Buffalo, Master of Science, 2008.
37. C-I Huang, C-F. Chang, M-Y Yu, L-C Fu, “Sliding-mode tracking control of the
Stewart platform”, Control Conference, 2004. 5th Asian, 1, pp 562-569, 2004.
38. J. Rasmussen, M. Damsgaard, and M. Voigt, "Muscle recruitment by the min/max
criterion – a comparative study." Journal of Biomechanics, 34: 409-415, 2001.
154
39. M. Damsgaard, J. Rasmussen, S.T. Christensen, E. Surmaa, M. Zee, "Analysis of
musculoskeletal systems in the AnyBody Modeling System." Simulation
Modelling Practice and Theory, 14(8): Pages 1100-1111, 2006.
40. M. de Zee, M. Dalstra, P. Cattaneo, J. Rasmussen, P. Svensson, B. Melsen,
"Validation of a musculo-skeletal model of the mandible and its application to
mandibular distraction osteogenesis." Journal of Biomechanics 40(6): 1192-1201,
2006
41. R. M. Bhatt, V. Krovi, “DynaFlexPro for Maple”, IEEE Control System. 26: 127-
138, 2006
42. M. Klein Horsman, H. Koopman, F. Van der Helm, L. Prose, H. Veeger,
"Morphological muscle and joint parameters for musculoskeletal modeling of the
lower extremity." Clinical Biomechanics 22(2): 239-247, 2007
43. D.L. Lindner, S. M. Marretta, G.J. Pijanowski, A.L. Johnson, C.W. Smith,
"Measurement of Bite Force in dogs: A Pilot Study." Journal of Veterinary
Dentistry 12(2): 49-52, 1995.
44. Muscle Physiology, http://muscle.ucsd.edu/musintro/jump.shtml
45. Capture3D Laser Scanners, http://capture3d.com/knowledge-column.html
46. NextEngine Scanner, https://www.nextengine.com/indexSecure.htm
47. W.D. Turnbull, "Mammalian Masticatory Apparatus”, Field Museum of Natural
History, 18(2): pp-268, 1970
48. MotionPro Inc, “DynaFlexPro User Manual”, Maplesoft Waterloo, Canada

155
49. Y. Wang, “Symbolic Kinematics and Dynamics Analysis and Control of a
General Stewart Parallel Manipulator”, Department of Mechanical & Aerospace
Engineering, State University of New York at Buffalo, Master of Science, 2008.
50. Laser scanners, http://en.wikipedia.org/wiki/3D_scanner
51. “MIMICS User Manual and Tutorials”
52. Ariel Performance Analysis System, “APAS User Manual and Tutorials”.
53. AnyBody Modeling System, “AnyBody User Manual”
Related Documents











