
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Qualitative spatio-temporal representation andreasoning: a computational perspectiveFrank Wolter and Michael ZakharyaschevInstitut f�ur Informatik, Universit�at LeipzigAugustus-Platz 10-11, 04109 Leipzig, Germany;Department of Computer Science, King's CollegeStrand, London WC2R 2LS, U.K.(emails: [email protected], [email protected])\Although there has always been a temptation inKR to set the sights either too low (and provideonly a data structuring facility with little or noinference) or too high (and provide a full theoremproving facility), this paper argues for the richworld of representation that lies between these twoextremes." Levesque and Brachman (1985)1 IntroductionTime and space belong to those few fundamental concepts that always puzzledscholars from almost all scienti�c disciplines, gave endless themes to science�ction writers, and were of vital concern to our everyday life and commonsensereasoning. So whatever approach to AI one takes [Russell and Norvig, 1995],temporal and spatial representation and reasoning will always be among itsmost important ingredients (cf. [Hayes, 1985]).Knowledge representation (KR) has been quite successful in dealing sepa-rately with both time and space. The spectrum of formalisms in use ranges fromrelatively simple temporal and spatial databases, in which data are indexed bytemporal and/or spatial parameters (see e.g. [Sre�k, 1995; Worboys, 1995]),to much more sophisticated numerical methods developed in computational ge-ometry (see e.g. [Preparata and Shamos, 1985]) and various qualitative logicaltheories (see [Stock, 1997; Casati and Varzi, 1999; Cohn and Hazarika, 2001]and references therein). However, despite the modern view of space and timeas space-time (not only in physics, but in AI as well1), apart from approaches1\Events happen in time, but also in space|they have a where as well as a when. They arefour-dimensional spatiotemporal entities" [Hayes, 1985]. \The spatial data models currentlyused as the foundation for geographical information systems (GISs) fall short of conveying therich and complex ways in which phenomena change over space and time. One of the majorlimitations of today's systems, for example, is that they capture only a snapshot of reality,reliant as they are on databases that contain only current data" [Hornsby and Egenhofer,2000]. 1

based on classical quantitative models of kinematics (see e.g. [Rajagopalanand Kuipers, 1994; Hays, 1989]), surprisingly little has been done to designqualitative spatio-temporal representation formalisms [Vieu, 1991; Galton, 1997;Muller, 1998; Hornsby and Egenhofer, 2000; Wolter and Zakharyaschev, 2000b],let alone implementations. More refs? Orfewer?Although a deep ontological analysis of qualitative spatio-temporal entitiesseems still missing [Vieu, 1997], yet there is a quite simple `na��ve' approach toconstructing such formalisms. Just take your favorite temporal logic T and yourfavorite spatial logic S, and merge them into a single spatio-temporal hybrid,allowing the desirable amount of interaction between space and time. The con-struction can be driven either by syntactical or by semantical considerations. Inthe former case, one joins the axioms of T and S together with some interactingprinciples (cf. [Muller, 1998]). The next step would be to supply the result-ing system with an intended interpretation|to demonstrate which aspects ofour intuitive views on space are captured by the theory|and show that theymatch (i.e., prove soundness and completeness). The example of RCC [Randellet al., 1992] (as well as general results on multi-dimensional logics [Gabbay etal., 2001]) shows, however, that this can be a hard mathematical problem (see[Gotts, 1996a; Stell, 2000]).By taking the semantical way|which will be done in this paper|we �rst in-tegrate the intended models of T and S into a multi-dimensional spatio-temporalstructure (as e.g. in Fig. 1), and then combine their languages into a `super-language' which is capable of speaking about these structures (see e.g. [Wolterand Zakharyaschev, 2000b]). It may be very di�cult (if at all possible) to writedown axioms for such a system, but for most KR purposes this should not bean obstacle, provided that the interpretation is transparent and convincing, andthe system can be supplied with a reasoning procedure.
������� �������������� �������
6Time
SpaceSpace t
t0~n
~n
Figure 1: Spatial regions moving in time.Our intended models of space are a variant of mereotopological models: theprimitive entities|regions|are interpreted as regular closed sets of topologi-cal spaces [Grzegorczyk, 1960; Gotts, 1996b] so that any two regions can stand Who else?2

in precisely one of the eight relations depicted in Fig. 2 [Egenhofer and Fran-zosa, 1991; Randell et al., 1992]. As concerns time, we consider three fun-damental paradigms: linear point-based time (discrete, dense, etc.), branch-ing point-based time, and linear interval-based time (see e.g. [Allen, 1983;Gabbay et al., 1994; van Benthem, 1996; Gabbay et al., 2000]). The spatialdimension (topological space) is supposed to be always the same, however re-gions can change their positions with time passing by (see Fig. 1). Thus, ourspatio-temporal interpretations can be regarded as the Cartesian products ofspatial and temporal structures.
PO(X;Y ) EQ(X;Y ) NTPP(X;Y ) NTPPi(X;Y )DC(X;Y ) EC(X;Y ) TPP(X;Y ) TPPi(X;Y )��������YX X Y ����X Y ����X Y��������YX ��������YX ����X Y ����X Y
Figure 2: The eight relations between regions.Having �xed the intended spatio-temporal structures, we still have a richchoice of spatial and temporal languages, in which we can speak about thesestructures, and a variety of ways to combine the languages. Here we come tothe main issue of this paper: to investigate computational properties of spatio-temporal logics. Our concern is to �nd out which constructors of the languagesand which kinds of interaction between them cause a `bad computational be-havior' and which result in `implementable' spatio-temporal formalisms.A very important point here is that in this multi-dimensional case the `fun-damental tradeo�' is not only between rich �rst- or higher-order theories onthe one hand, and their less expressive (e.g., propositional) fragments on theother, say, between the full region connection calculus RCC [Randell et al., 1992],which is undecidable [Gotts, 1996b; Dornheim, 1998], and its propositional frag-ment RCC-8 which is decidable [Bennett, 1994] (in fact, NP-complete [Renz andNebel, 1999]). An interaction between dimensions or, at the syntactical level,between connectives of the spatial and temporal languages can dramatically`spoil' nice computational properties of the components. The following simpleexample can serve as a good illustration.Example 1. Consider the compass logic of [Venema, 1990] which can be viewedas a sort of `orientation logic' on the plane. The intended model is the 'map'N � N with the standard orientation; see Fig. 3 (in fact, we can take any in-�nite grid, say, R � R). There are two compass operators 3N and 3E on the3
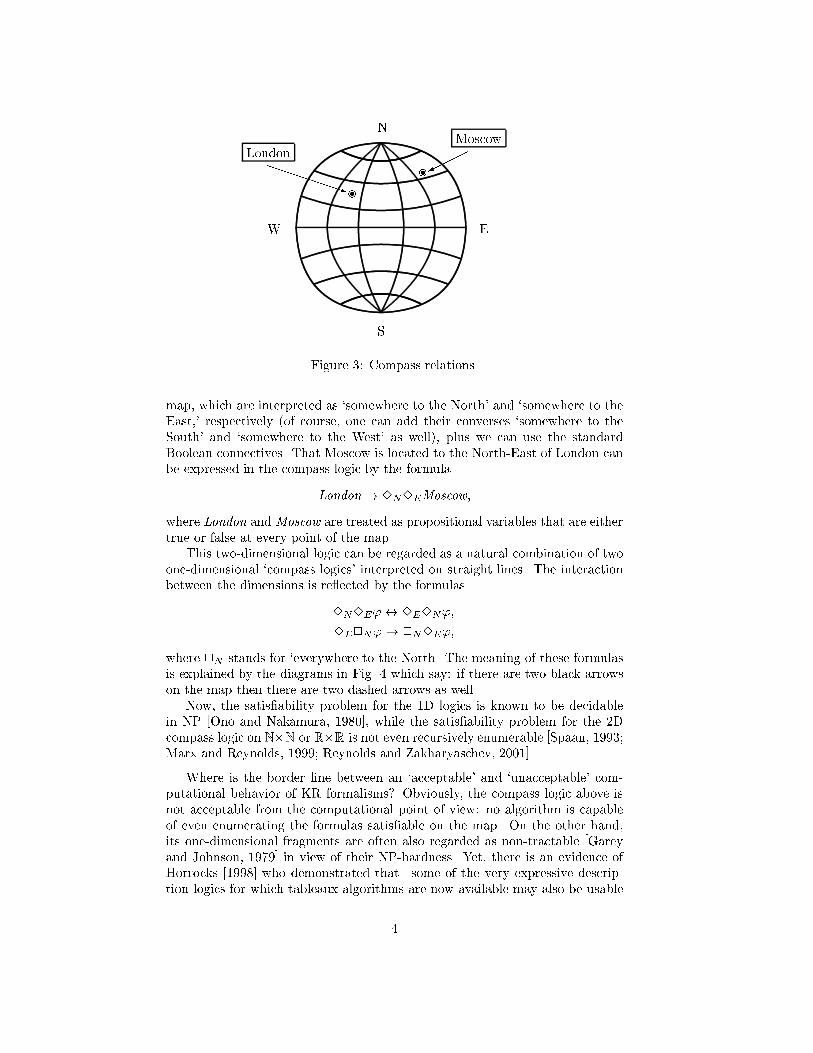
rd rdW EN
SLondonPPPPPPq Moscow����
Figure 3: Compass relations.map, which are interpreted as `somewhere to the North' and `somewhere to theEast,' respectively (of course, one can add their converses `somewhere to theSouth' and `somewhere to the West' as well), plus we can use the standardBoolean connectives. That Moscow is located to the North-East of London canbe expressed in the compass logic by the formulaLondon! 3N3EMoscow;where London and Moscow are treated as propositional variables that are eithertrue or false at every point of the map.This two-dimensional logic can be regarded as a natural combination of twoone-dimensional `compass logics' interpreted on straight lines. The interactionbetween the dimensions is re ected by the formulas3N3E'$ 3E3N';3E2N'! 2N3E';where 2N stands for `everywhere to the North. The meaning of these formulasis explained by the diagrams in Fig. 4 which say: if there are two black arrowson the map then there are two dashed arrows as well.Now, the satis�ability problem for the 1D logics is known to be decidablein NP [Ono and Nakamura, 1980], while the satis�ability problem for the 2Dcompass logic on N�N or R�R is not even recursively enumerable [Spaan, 1993;Marx and Reynolds, 1999; Reynolds and Zakharyaschev, 2001].Where is the border line between an `acceptable' and `unacceptable' com-putational behavior of KR formalisms? Obviously, the compass logic above isnot acceptable from the computational point of view: no algorithm is capableof even enumerating the formulas satis�able on the map. On the other hand,its one-dimensional fragments are often also regarded as non-tractable [Gareyand Johnson, 1979] in view of their NP-hardness. Yet, there is an evidence ofHorrocks [1998] who demonstrated that \some of the very expressive descrip-tion logics for which tableaux algorithms are now available may also be usable4

t d t t t tt t d t t d- - -6 6 6- - -6 6 6Figure 4: Commutativity and Church{Rosser properties.in realistic applications." Here and in [Horrocks et al., 1999] `very expressive'means PSPACE-hard and EXPTIME-hard, respectively. Hustadt and Schmidt[2000] successfully used a full �rst-order prover for dealing with EXPTIME-complete modal logics. And MONA (see [Klarlund et al., 2000] and referencestherein) is a good example of an implementation of decision procedures for the-ories with a non-elementary worst-case complexity.2 A possible explanation ofthis phenomenon is that \in all practically occurring situations the worst casenever seems to happen. The reason is that de�nitions occurring in practiceare somehow well-structured. : : : and this does not only hold for knowledgerepresentation systems based on description logic but also for object-orienteddatabase systems" [Nebel, 1996].Of course, only experiments can show whether this or that KR formalismcan be applied in practice. In this paper, however, we suggest to qualify a logicas having an acceptable computational behavior if it is� decidable and� supported by a potentially implementable decision algorithm.The organization of the paper is very simple. In Sections 2 and 3 we intro-duce the spatial and temporal components of the spatio-temporal logics to beconstructed in Section 4. We de�ne both the syntax and the intended semanticsof the logics, illustrate their expressive power by multiple examples, and focusattention on their computational behavior. It is to be noted from the very be-ginning that we are not putting forward a novel spatio-temporal paradigm. Norare we designing the spatio-temporal KR formalism suitable for all potentialapplications in GISs, computer vision, robotics, image retrieval, etc. Our aimis more modest: we combine (some of) the existing spatial and temporal logicsand analyze the computational behavior of the resulting hierarchy of spatio-temporal hybrids. As the �eld of spatio-temporal representation and reasoningis still at the `embryo' stage, the paper contains a considerable number of openproblems.Although all technical proofs are omitted, we nevertheless try to give thereader the underlying ideas in the hope of sharing our excitement about thisinteresting and promising �eld of KR based on multiple connections to geometry,algebra, topology, modal and temporal logics, and other disciplines.2\Perhaps surprisingly, this complexity also contributes to successful applications, since itis provably linked to the succinctness of the logics" [Klarlund et al., 2000].
5

2 Of spaceThere are di�erent approaches to qualitative spatial representation in AI (com-prehensive surveys can be found in [Vieu, 1997; Casati and Varzi, 1999; Cohnand Hazarika, 2001]). Here we consider only one, perhaps the most in uentialof them, which takes extended regions of space as the primitive spatial entity.Properties of regions are usually de�ned by �rst-order axiomatic theories (seee.g. [Clarke, 1981; Randell et al., 1992]) the (explicit or implicit) intendedmodels of which are topological, in particular, Euclidean spaces.2.1 Topological spacesDe�nition 2 (topological space). A topological space is a pair T = hU; Ii inwhich U is a non-empty set, the universe of the space, and I is the interioroperator on U satisfying the following Kuratowski axioms: for all X;Y � U ,I(X \ Y ) = IX \ IY; IX � IIX; IX � X; IU = U:The operator dual to I is called the closure operator and denoted by C ; thus,for every X � U , CX = U � I(U � X) (or CX = �I� X , for short). A setX � U is called open if X = IX (IX is known as the interior of X) and closedif X = CX (CX is the closure of X). The set CX � IX is called the boundaryof X .In this paper, we will need only two kinds of topological spaces.Example 3 (Euclidean spaces). Let X be a set of real numbers, i.e, X � R.A point x 2 R is said to be interior in X if there is some � > 0 such that thewhole open interval (x� �; x+ �) belongs to X . The interior IX of X is de�nedthen as the set of all interior points in X . It is not hard to check that hR; Ii isa topological space; it is called the one-dimensional Euclidean space. Open setsin hR; Ii are (possibly in�nite) unions of open intervals (a; b), where a � b. Theclosure of (a; b), for a < b, is the closed interval [a; b], with the end points a andb being its boundary. In the same manner one can de�ne higher-dimensionalEuclidean spaces based the universes Rn for n > 1 (in the de�nition of interiorpoints x one should take n-dimensional �-neighborhoods of x).There can be di�erent views on what sets of a topological space T = hU; Iican be taken as interpretations of spatial regions (for a discussion consult [Vieu,1997; Gotts, 1996a]).3 Following [Gotts, 1996a], we interpret regions only as Who was the�rst?regular closed sets, i.e., sets X such that X = C IX (an alternative would be totake regular open sets X for which X = ICX). For example, the circleC(a; r) = f(x1; x2) 2 R2 :p(x1 � a1)2 + (x2 � a2)2 � rgwith center a = (a1; a2) and of radius r > 0 on the Euclidean plane is a regularclosed set, while the balloon obtained by attaching to C(a; r) a thread (e.g.a segment of a straight line) is not regular closed, because the interior of thethread in R2 is empty.3Actually, the choice is determined by the way of characterizing a relation of connectionbetween two regions. Our interpretation re ects the following de�nition: regions X and Yare connected i� CX \ CY 6= ;. For a comparison of di�erent de�nitions consult [Cohn andVarzi, 1998]. 6

An important property of topological spaces is that any, even in�nite, union(intersection) of open (closed) sets is open (respectively, closed). An in�niteunion (intersection) of closed (open) sets is not necessarily closed (open). Forexample, in R we have:1[n=1[1=n; 1� 1=n] = (0; 1); 1\n=1[�1=n; 1=n] = f0g: (1)Example 4 (Kripke spaces). Recall that a quasi-order is a pair G = hV; Si,where S is a re exive and transitive binary relation on V 6= ;. With everyquasi-order G one can associate a topological space TG = hV; IGi by taking, forevery X � V , IGX = fx 2 X : 8y 2 V (xSy ! y 2 X)g: (2)We call TG the Kripke space determined by G (the reason for this name will beexplained in Section 2.2.4; these spaces are also known as Alexandrov spaces).The closure operator CG on TG is de�ned then byCGX = fy 2 V : 9x 2 X ySxg: (3)It follows from (2) and (3) that arbitrary unions (intersections) of closed (open)sets of Kripke spaces are closed (respectively, open).It is not hard to see that, for any two regions X and Y in a topological spaceT = hU; Ii, one and only one of the following eight relations can hold betweenX and Y (see Fig. 2):DC(X;Y ) i� :9x x 2 X \ Y;EQ(X;Y ) i� 8x (x 2 X $ x 2 Y );PO(X;Y ) i� 9x (x 2 IX \ IY ) ^ 9x (x 2 IX \ �Y ) ^ 9x (x 2 �X \ IY );EC(X;Y ) i� 9x (x 2 X \ Y ) ^ :9x (x 2 IX \ IY );TPP(X;Y ) i� 8x (x 2 �X [ Y ) ^ 9x (x 2 X \ �IY ) ^ 9x (x 2 �X \ Y );TPPi(X;Y ) i� TPP(Y;X);NTPP(X;Y ) i� 8x (x 2 �X [ IY ) ^ 9x (x 2 �X \ Y );NTPPi(X;Y ) i� NTPP(Y;X):In English, these relations can be described as Disconnection, Equality, PartialOverlap, External Connection, Tangential Proper Part, Non-Tangential ProperPart, and the inverses of the last two.In view of this property of being jointly exhaustive and pairwise disjoint, theeight relations above play a fundamental role in spatial representation and rea-soning (the same as Allen's 13 relations between time intervals; see Section 3.4).We will call them the basic relations or the RCC-8 relations (or predicates).2.2 Spatial logicsLanguages of di�erent expressive power can be used to talk about regions intopological spaces. 7

DC(X;Y ) = :C(X;Y )P(X;Y ) = 8Z (C(Z;X)! C(Z; Y ))EQ(X;Y ) = P(X;Y ) ^ P(Y;X)O(X;Y ) = 9Z (P(Z;X) ^ P(Z; Y ))PO(X;Y ) = O(X;Y ) ^ :P(X;Y ) ^ :P(Y;X)EC(X;Y ) = C(X;Y ) ^ :O(X;Y )PP(X;Y ) = P(X;Y ) ^ :P(Y;X)TPP(X;Y ) = PP(X;Y ) ^ 9Z (EC(Z;X) ^ EC(Z; Y ))NTPP(X;Y ) = PP(X;Y ) ^ :9Z (EC(Z;X) ^ EC(Z; Y ))Table 1: Some relations between spatial regions, de�ned in terms of C.2.2.1 First-order logicsOften, logical formalisms for qualitative spatial representation are formulatedas �rst-order theories [Whitehead, 1929; Clarke, 1981; Randell et al., 1992;Casati and Varzi, 1999]. For instance, the language of RCC consists of indi-vidual variables X;Y; : : : (understood as variables over regions), the individualconstant U (for the universal region), the binary predicate C(X;Y ) (read as`X connects with Y '), a number of functions such as sum(X;Y ), compl(X),prod(X;Y ), the Boolean logical connectives, and the quanti�ers 8 and 9. Theeight basic predicates are de�ned via C as in Table 1 (where P stands for `part,'O for `overlaps,' and PP for `proper part'), and the axioms of RCC include, inparticular, 8X C(X;X);8X;Y (C(X;Y )! C(Y;X));8X C(X;U);8X9Y NTPP(Y;X);8X;Y; Z �C(Z; sum(X;Y ))$ C(Z;X) _ C(Z; Y )�:Unfortunately, from the computational point of view, full RCC turns out to betoo expressive: as was shown in [Gotts, 1996b; Dornheim, 1998] (and actuallyfollows from [Grzegorczyk, 1951]), it is undecidable. Another problem with RCCis its semantical characterization. For example, it is an open question whetherRCC is sound and complete with respect to topological interpretations. Is it so?Of course, one can change direction and start from semantics. If we aresatis�ed with the mereotopological model for qualitative spatial representation,then we can use as a variant of spatial logic the set of all �rst-order formulasin a proper signature, say, containing the eight basic predicates in Fig. 2, thathold in all topological models de�ned as follows (cf. [Dornheim, 1998]):De�nition 5 (topological model). A topological model is a structure of theformS = DR(T);DCT;EQT;POT;ECT;TPPT;TPPiT;NTPPT;NTPPiTE ; (4)8

where T is a topological space, R(T) the set of all regular closed subsets inT, and DCT, EQT, POT, ECT, TPPT, TPPiT, NTPPT, NTPPiT are the basicpredicates on R(T) de�ned as above.Let a be an assignment in S associating with every region variable X a seta(X) in R(T). A �rst-order formula '(X1; : : : ; Xn) in the signature of the RCC-8 predicates and with free variablesX1; : : : ; Xn is satis�ed inS under a (S j=a 'in symbols) if S j= '[a(X1); : : : ; a(Xn)] in the standard model-theoretic sense.Unfortunately, even this simpli�ed approach turns out to be computationallyunacceptable: as follows from [Grzegorczyk, 1951], this logic is undecidable aswell. (Booleans expressible via C.) Check!!. Whatabout axioma-tizability?2.2.2 RCC-8As the eight basic region-relations play so important role in spatial representa-tion and reasoning [Egenhofer and Franzosa, 1991; Egenhofer, 1991; Smith andPark, 1992], to obtain a computationally well-behaved spatial formalism, wecan sacri�ce quanti�cation and consider the quanti�er-free fragment of the logicof topological models de�ned above. This fragment is known as RCC-8. Thus,RCC-8 formulas are simply Boolean combinations of the RCC-8 predicates.De�nition 6 (consequence). Say that an RCC-8 formula ' is a consequenceof a set � of RCC-8 formulas if for every topological model S and every as-signment a in it, we have S j=a ' whenever S j=a �. In this case we write� j= '.For example, using the language of RCC-8 we can compose spatial knowledgebases like EC(Catalunya, France);TPP(Catalunya, Spain) _ NTPP(Catalunya, Spain);DC(Spain, France) _ EC(Spain, France);NTPP(Paris, France):The formulas EC(Spain, France), TPP(Catalunya, Spain), and DC(Spain, Paris)are then consequences of this knowledge base.It should be clear that � j= ' holds i� the formula :'^V� is not satis�ablein topological models. Thus, to understand the computational properties ofRCC-8, we can con�ne ourselves to considering only the satis�ability problem.That this problem is decidable was �rst observed by Bennett [1994] whoencoded RCC-8 into a decidable propositional modal logic. And later Renzand Nebel [1999] showed that the satis�ability problem for RCC-8 formulas isNP-complete. For more details see Section 2.2.4.2.2.3 BRCC-8One apparent `de�cit' of RCC-8 is that it operates only with atomic regions. Wecan't form unions (t) or intersections (u) of regions to say, for instance, thatEQ(EU; Spain t Italy t : : : )9

(`the EU consists of Spain, Italy, etc.'),P(Alps; Italy t France t : : : )(`the Alps are located in Italy, France, etc.'),EC(Austria; Alps u Italy)(`Austria is externally connected to the alpine part of Italy'), and deduce fromthese that if EC(X;EU), for some country X , then EC(X;Y ) for some countryY in the EU, or that there is a country Z such that TPP(Z;EU) (i.e., `Z isa tangential proper part of the EU'). Note by the way that the last formulais a correct conclusion only if we interpret our formulas in Euclidean (or, moregenerally, connected4) topological spaces (and if there are non-EU countries): ina discrete topological space (where all sets are open) the EU may be an open setwith empty boundary. This simple observation and the result of [Renz, 1998],according to which every satis�able RCC-8 formula is satis�able in all Euclideanspaces Rn , n � 1, show that the Boolean operations on region terms indeedincrease the expressive power of RCC-8.De�nition 7 (boolean region term). A Boolean region term is just a com-bination of region variables using the Boolean operators t, u, and :.Denote by BRCC-8 the extension of RCC-8 which allows the use of Booleanregion terms as arguments of the RCC-8 predicates. As the Boolean operatorsdo not in general preserve the property of being regular closed, we have to adjustthe interpretation of Boolean region terms in a topological model S of the form(4) by taking, for region terms t and t0,a(t t t0) = C I(a(t)[ a(t0)) = a(t) [ a(t0);a(t u t0) = C I(a(t)\ a(t0));a(:t) = C I(U � a(t)):Thus, every region term is interpreted as a regular closed set of T. Note thata(X u :X) = ; and a(X t :X) = U for any a and T. We denote the regionterms Xu:X and Xt:X by ? and >, respectively. The constraint :EQ(X;?)asserts that X is a non-empty region.The computational behavior of BCCR-8 in arbitrary topological models isprecisely the same as that of RCC-8. However, if only Euclidean topologicalmodels are regarded as possible interpretations, the satis�ability problem forBCCR-8 formulas becomes PSPACE-complete (for details consult [Wolter andZakharyaschev, 2000a]).2.2.4 Modal logics as spatial logicsThe proof of the decidability of RCC-8 in [Bennett, 1994] brought in sight an-other kind of formalism which can be used as a spatial logic. In fact, the logicwas introduced independently by Orlov [1928], Lewis in [?], and G�odel [1933]without any intention to reason about space. Lewis baptized the logic as S44A topological space is called connected if it can't be represented as a union of two disjointopen sets. 10

and understood it as a logic of necessity and possibility, that is as a modal logic.Besides the Boolean connectives and propositional variables, its language con-tains two modal operators 2 (`it is necessary;' Orlov and G�odel treated 2 as`it is provable') and 3 (`it is possible'). The axiom shemata of S4 are those ofclassical propositional calculus, three modal schemata:2('! )! (2'! 2 ); 2'! '; 2'! 22';and two inference rules: modus ponens and necessitation '=2'. The possibilityoperator is de�ned as dual to 2, i.e., 3' = :2:'.In the late thirties and early forties several logicians [Stone, 1937; Tarski,1938; Tsao-Chen, 1938; McKinsey, 1941] noticed that S4 can be interpreted intopological spaces. Actually, there is a striking similarity between the axiomsof S4 and Kuratowski's axioms for the interior operator. (The �rst schema andrule of necessitation can be replaced with 2(' ^ ) $ (2' ^ 2 ) and 2>,corresponding to the �rst and the last topological axioms.)Suppose that an assignment v in a topological space T = hU; Ii is a mapfrom the set of propositional variables in S4 to 2U . We then inductively extendv to all modal formulas by interpreting 2 as I,3 as C , ^ as \, and : as �. Nowwe say that a modal formula ' is satis�ed in T under v if v(') 6= ;; ' is valid inT (T j= ', in symbols) if v(') = U . It turns out that S4 is sound and completewith respect to this interpretation: a modal formula ' is derivable in S4 i� ' isvalid in all topological spaces i� ' is valid in any n-dimensional Euclidean space(n � 1) [McKinsey, 1941; McKinsey and Tarski, 1944]. A remarkable result dueto Dummett and Lemmon [1959] and Kripke [1963] is that S4 is complete withrespect to �nite Kripke spaces (Kripke used quasi-orders to de�ne his possibleworld semantics for S4).5Thus, S4 can be regarded as a `logic of topological spaces.' We can increasethe expressive power of S4 by adding to it one more pair of modal operators 28and 39 , known as the universal modalities. The topological meaning of 28 and 39is `for all points in the space' and `for some point in the space,' respectively. Moreprecisely, for every formula ' in the extended language and every topologicalspace T = hU; Ii with an assignment v, we have:v(28 ') = � U if v(') = U ,; otherwise; v(39 ') = � U if v(') 6= ;,; otherwise.The set of all formulas in this language that are valid in all topological spacesis denoted by S4u; it can be axiomatized by adding to S4 the schemata3'! 23' and 28'! 2':According to [Goranko and Passy, 1992], S4u is also complete with respect to�nite Kripke spaces. Note, however, that in constrast to S4 itself, S4u is notcomplete with respect to Euclidean spaces. The set of formulas valid in allEuclidean spaces is strictly larger than S4u. It was axiomatized in [Shehtman,1999] by adding to S4u the schemata 28 (2' _ 2:')! 28' _28:'.5This story is really amazing. In 1908, Brouwer introduced intuitionistic logic Int; later hebecame also famous in topology. Orlov and G�odel de�ned S4 in order to interpret intuitionisticlogic in classical one. Open sets in a topological space form a complete Heyting algebra,which is a model of Int, and can be used as a model of RCC [Stell and Worboys, 1979;Stell, 2000]. 11

S4u is expressive enough to encode the topological meaning of the RCC-8predicates and that of Boolean region terms.6 Indeed, let us denote the boxand the diamond of S4 by, respectively, I and C (to emphasize their topologicalinterpretation as the interior and closure operators). For a Boolean region termt, de�ne inductively a modal formula t� by taking:X�i = CIpi; (Xi is a region variable, pi a propositional variable),(t1 u t2)� = CI(t�1 ^ t�2);(t1 u t2)� = CI(t�1 _ t�2);(:t)� = CI:t�:Then, with every atomic BRCC-8 formula P (s; t) we associate a modal formula(P (s; t))� de�ned by:(DC(s; t))� = :39 (s� ^ t�);(EQ(s; t))� =28 (s� $ t�);(PO(s; t))� =39 (Is� ^ It�) ^39 (Is� ^ :t�) ^39 (:s� ^ It�);(EC(s; t))� =39 (s� ^ t�) ^ :39 (Is� ^ It�);(TPP(s; t))� =28 (:s� _ t�) ^39 (s� ^C:t�) ^39 (:s� ^ t�);(NTPP(s; t))� =28 (:s� _ It�) ^39 (:s� ^ t�):Finally, given a BRCC-8 formula ', denote by '� the result of replacing alloccurrences of atomic formulas P (s; t) in ' by (P (s; t))�.Since the de�nition of the translation �� mimics the de�nition of the RCC-8predicates and since the formula CICI' $ CI' is provable in S4, we imme-diately obtain the following theorem the original RCC-8 version of which is dueto [Bennett, 1994] (see also [Wolter and Zakharyaschev, 2000a]):Theorem 8. For every BRCC-8 formula ', the following conditions are equiv-alent:(i) ' is satis�able in a topological model;(ii) '� is satis�able in a topological space;(iii) '� is satis�able in a �nite Kripke space.As a consequence we have:Corollary 9. The satis�ability problem for BRCC-8 formulas is decidable.The modal translation '� of a BRCC-8 formula ' has a rather special form.Renz [1998] used this form to show that satis�able RCC-8 formulas can besatis�ed in very simple Kripke spaces, namely in those determined by quasi-orders we call quasisaws.A quasisaw is a partial order G = hW;Ri every point in which has at mosttwo successors, with these successors being R-incomparable. An example of aquasisaw is shown in Fig. 5. It should be clear that if an S4u-formula is satis�edin a quasisaw then it is satis�ed in a disjoint union of forks (de�ned in Fig. 5)as well. The following generalization of Renz's result was proved in [Wolter andZakharyaschev, 2000a].6Recently, the expressive power of the language of S4u has been characterized in terms ofbisimulations by Aiello and van Benthem [2000]. The associated topo-games have been usedin [Aiello, 2001] to measure a di�erence between spatial regions.12

| {z }forksb b b b b b b bb b b b b bJJJ] JJJ] JJJ] JJJ]� � � �HHHHHHY 6Figure 5: Quasisaw.Theorem 10. A BRCC-8 formula ' is satis�able i� '� is satis�able in theKripke space determined by a quasisaw containing � `('�) forks, where `('�)is the length of '�.Thus, the satis�ability problem for BRCC-8 formulas ' in topological modelsreduces to the satis�ability problem for their modal translations '� in quasisawswhich are disjoint unions of forks. We can make one step further by observingthat the latter problem can be reduced to the satis�ability of �rst-order formulaswith a single variable. The idea behind this reduction is to represent everysubformula of '� by means of three �rst-order formulas b, l, r whichencode the `behavior' of at the three points of a fork. More precisely, wede�ne inductively three translations �b, �l, and �r by takingpi = P i(x); p a propositional variable, for i 2 fb; l; rg;( � �)i = i � �i; for i 2 fb; l; rg and � 2 f^;_g;(: )i = : i; for i 2 fb; l; rg;(I )b = b ^ l ^ r;(I )i = i; for i 2 fl; rg;(28 )i = 8x ( b ^ l ^ r); for i 2 fb; r; lg.Finally, we de�ne the translation 'y of a BRCC-8 formula ' into the one-variablefragment of �rst-order logic as ('�)b. It should be clear that the length of 'y ispolynomial in the length of '.Theorem 11. A BRCC-8 formula ' is satis�able in a topological model i� 'yis a satis�able �rst-order formula.As is well-known, the satis�ability problem for �rst-order formulas with onevariable is NP-complete (the one-variable fragment of �rst-order logic is a no-tational variant of the propositional modal logic S5). As a consequence, weimmediately obtain the following generalization of a result of [Renz and Nebel,1999]:Theorem 12. The satis�ability problem for BRCC-8 formulas in topologicalmodels is NP-complete.(Remember that satis�ability of BRCC-8 formulas in connected topological spacesis PSPACE-complete.) 13

3 Of timeLet us now turn to semantical structures representing time and languages de-signed for speaking about these structures.De�nition 13 ( ow of time). By a ow of time we mean any strict partialorder F = hW;<i, whereW is a non-empty set of time points and < a (transitiveand irre exive) precedence relation on W .Depending on applications, one can distinguish between various kinds of ows of time. For example, a linear discrete ow like hN; <i can represent ticksof the computer clock or years AD. A linear dense ow like hQ; <i or hR; <ire ects the continuity of time. A branching ow hW;<i, where < is a treeorder on W (for a precise de�nition see Section 3.2) suggests that the future isnon-deterministic, while the past is determined. For more discussions consult[Gabbay et al., 1994, 2000].3.1 Linear timeAs in the case of space, we can choose between di�erent languages to speakabout ows of time.3.1.1 First-order logicFirst, we can take the �rst-order language L< with one binary predicate <,interpreted by the precedence relation of a given ow of time F = hW;<i, anin�nite list P0; P1; : : : of unary predicates for expressing properties of the timepoints, and individual variables x0; x1; : : : ranging over these points. Formulasof L< are built from atoms of the form Pi(xj) and xl < xm by means of theBooleans ^ and :, and the �rst-order quanti�ers 8xi and 9xi.The language L< and its relation to automata has been thoroughly inves-tigated [B�uchi, 1962; Gurevich, 1964; L�auchli and Leonard, 1966; Stockmeyer,1974; Meyer, 1975; Burgess and Gurevich, 1985]. In particular, the followingresults have been obtained:Theorem 14. The satis�ability problem for L<-formulas is decidable in thefollowing classes of ows of time: all strict linear orders, fhR; <ig, fhQ; <ig,fhZ; <ig, fhN; <ig. However, in all these cases, the satis�ability problem isnon-elementary. Is it so?Thus, reasoning about time with �rst-order logic is `very expensive.' On theother hand, in our everyday life we rarely use explicit quanti�cation over timepoints, preferring expressions like `tomorrow,' `always,' `eventually,' `since,' etc.,which do not mention time points explicitly.3.1.2 Propositional temporal logicTemporal logic, as opposed to �rst-order logic, is an approach to reasoning abouttime (and computation) using such expressions as temporal connectives andnot allowing for explicit quanti�cation over time. Its most popular variant, thepropositional temporal logic PT L, is successfully applied in program veri�cationand speci�cation (see e.g. [Manna and Pnueli, 1992; 1995]). PT L-formulas are14

constructed from propositional variables p0; p1; : : : using the Booleans and thebinary temporal operators S (`since') and U ('until'), the intended meaning ofwhich is as follows:� �1U�2 stands for `�1 holds true until �2 holds;"� �1S�2 stands for `�1 has been true since �2 was true.'Other temporal connectives like 3F (`sometime in the future'), 2F (`alwaysin the future'), their past counterparts, and (`at the next moment') can bede�ned via U and S. For instance, 3F' = >U', ' = ?U'.To evaluate PT L-formulas in a ow of time F = hW;<i, we have to specify�rst at which time points the propositional variables hold. Thus, we start witha valuation V associating with every variable p a subset V(p) of W . The pairM = hF;Vi is called a model based on the ow of time F. The truth-relation(M; w) j= ', or simply w j= ' if understood (which says that a PT L-formula 'holds at moment w inM) is de�ned as follows: w j= pi i� w 2 V(pi), w j= '^ i� w j= ' and w j= , w j= :' i� w 6j= ', andw j= 'S i� there is v < w such that v j= and u j= ' for all u 2 (v; w);w j= 'U i� there is v > w such that v j= and u j= ' for all u 2 (w; v):A formula ' is satis�able in a class C of ows of time if there is a model basedon a ow of time in C and a time point w in it such that w j= '.The following results are due to [Sistla and Clarke, 1985; Gabbay et al., 1994;Reynolds, 2001a; Reynolds, 2001b]:Theorem 15. The satis�ability problem for PT L-formulas is PSPACE-completein any of the classes mentioned in Theorem 14.By comparing the complexity results in Theorems 15 and 14, one mightconclude that the propositional temporal language is less expressive than the�rst-order language L<. Surprisingly enough, this is not the case: while L<is considerably more succinct than PT L, nevertheless the languages turn outto have the same expressive power over many ows of time. Obviously, everyPT L-formula ' is expressible as an L<-formula ST ('), called the standardtranslation of ' (see [van Benthem, 1983]). The following result is known asthe (generalized) Kamp theorem; for proofs and more details see [Kamp, 1968;Gabbay et al., 1994].Theorem 16. The languages PT L and L< have the same expressive powerover the ows of time hN; <i, hZ; <i, or hR; <i. More precisely, for every L<-formula with at most one free variable, there is a PT L-formula ' such that and ST (') are equivalent in all models based on any Dedekind complete owof time.3.2 Branching timeThe formalisms considered so far are not able to express the following statements(due to Aristotle):� it is necessary that there will be a sea-battle tomorrow;15

� it is possible that there will be a sea-battle tomorrow.Our languages can only say� sea-battle, i.e., there will be a sea-battle tomorrow,they do not distinguish between possible, actual, or necessary future develop-ments. A natural way to formalize assertions of this sort is to add the modaloperators 2 and 3 to the temporal language and understand them as quanti�ersover `possible histories.' For example, by interpreting 3 as `it is possible that'and 2 as `it is necessary that,' we can express two Aristotle's statements by theformulas 2 sea-battle and 3 sea-battle, respectively.Numerous extensions of PT L by means of such kind of modal operators havebeen introduced in di�erent disciplines, say, computer science and AI [Lam-port, 1980; Clarke and Emerson, 1981; Emerson and Halpern, 1986] or phi-losophy [Prior, 1968] (for more references and discussions see [Thomason, 1984;Gabbay et al., 2000]). Here we outline the essential ideas using the simple modalextension of PT L with 2 and 3; it will be calledMPT L.Having �xed the language, we need to choose time structures that couldallow for non-trivial interpretations. Clearly, if the ow of time is linear thenat every moment the future is �xed, and so 2' is equivalent to '. The ows oftime we need should be able to represent di�erent evolutions of history. Since,on the other hand, it is natural to assume that, in contrast to the future, thepast is �xed, trees as de�ned below appear to be perfect structures for modellingdi�erent histories.De�nition 17 (branching time model). A tree is a ow of time F = hW;<icontaining a point r, called the root of F, for which W = fv : r < vg [ frg, andsuch that for every w 2 W , the set fw : v < wg is �nite and linearly ordered by<.7 A history in F is a maximal linearly <-ordered subset of W .A branching time model is a structure B = hF;H;Vi, where F = hW;<i is atree,H a set of histories in F|the set of possible ows of time in the model|andV is a valuation in F. Formulas are evaluated relative to pairs (h;w) consistingof an actual history h 2 H and a time point w 2 h. In such a pair (h;w), thetemporal operators are interpreted along the actual history h as in the lineartime framework, while the modal operators quantify over the set of all historiesH(w) = fh0 2 H : w 2 h0g coming through w. More precisely, the truth-relationj= between pairs (h;w) and MPT L-formulas ' is de�ned inductively in thefollowing way (we omit the clauses for the Booleans):� (h;w) j= p i� w 2 V(p);� (h;w) j= 'U i� there is v 2 h such that v > w, (h; v) j= and (h; u) j= 'for all u 2 (w; v);� (h;w) j= 'S i� there is v 2 h such that v < w, (h; v) j= and (h; u) j= 'for all u 2 (v; w);� (h;w) j= 3' i� there is h0 2 H(w) such that (h0; w) j= ';� (h;w) j= 2' i� (h0; w) j= ' for all h0 2 H(w).7Other de�nitions of trees can be more liberal not requiring the �nitness of fw : v < wg.One can develop the whole formalism in this more general framework; see [Thomason, 1984].16

Note that propositional variables are assumed to have no temporal aspect|theirtruth-values at (h;w) do not depend on the actual history h.The branching time model de�ned above re ects the Ockhamist view oftime. We refer the reader to [Burgess, 1979; Zanardo, 1996; Gabbay et al., 2000;Reynolds, 2002] for more information about this and related approaches. Noteonly a close connection to the computational tree logics CTL and CTL� that arewidely used in program veri�cation and speci�cation [Clarke and Emerson, 1981;Emerson and Halpern, 1986; Clarke et al., 2000].It might seem more natural to quantify with 3 and 2 over the set of allhistories in the tree rather than its subset H. But then we would be forced toaccept possibly unintended histories in F as possible ows of time. Here is anexample of a formula satis�able in a branching time model as de�ned above,but not in a branching time model in which H is the set of all histories. Theformula is a conjunction of the following threeMPT L-formulas:2P(Kosovo; Y ugoslavia);23F2FEC(Kosovo; Y ugoslavia);22F �P(Kosovo; Y ugoslavia)! 3 P(Kosovo; Y ugoslavia)�:The �rst formula means that in all histories, at present Kosovo is part of Yu-goslavia. The second says that in all possible histories, there'll be a time startingfrom which Kosovo will be externally connected to Yugoslavia. And the last for-mula claims that in all possible histories, it is always the case that if Kosovo ispart of Yugoslavia then it is still possible that it will remain in Yugoslavia atleast one more day. (Since we do not have a combined spatio-temporal languageyet, the RCC-8 predicates P(Kosovo; Y ugoslavia) and EC(Kosovo; Y ugoslavia)should be regarded as a propositional variable and its negation, respectively.)The following results are due to [Burgess, 1979]. Is it so? Or Ra-bin. Complex-ity??Theorem 18. The satis�ability problem for PT LM-formulas is decidable.3.3 First-order temporal logicSo far, we haven't endowed time points with any structures that could representstates of application domains (e.g. spatial knowledge bases) at these points.When doing these, we get into the realm of �rst-order temporal logic or itsvariants, say, temporal description logic (see e.g. [Wolter and Zakharyaschev,2000c]).Suppose that in order to represent our application domain we use a �rst-order language FO with predicates P0; P1; : : : of some �xed arity. Assume alsothat the intended ow of time F = hW;<i is linear. Then a �rst-order temporalmodel based on F is a pair of the form M = hF;mi, where, for each w 2W ,m(w) = hD;Pw0 ; Pw1 : : :i (5)is an ordinary FO-structure, i.e., D is a non-empty set and the Pwi are relationson D of the same arity as Pi. Note that the Pwi depend on w, while the domainD of m(w) is assumed to be constant. Models of this type are often calledmodelswith constant domains. 17

An appropriate language for speaking about such models is the combinationof FO with PT L in which the temporal operators S and U can be applied to�rst-order formulas. It will be denoted by FOT L. The temporal operators Sand U take care of the temporal dimension, while the �rst-order part of thelanguage allows us to speak about the domain dimension.To de�ne the truth-relation j= between time points and formulas, we �rst�x an assignment a associating elements in D to individual variables. Then(M; w) j=a ' is de�ned by taking� (M; w) j=a Pi(x1; : : : ; xk) i� m(w) j= Pi[a(x1); : : : ; a(xk)],� (M; w) j=a 9x' i� there exists an assignment b which may di�er from aonly on x and such that (M; w) j=b ',and the propositional clauses for the Booleans and temporal operators. Un-fortunately, the resulting logics turn out to be highly undecidable for mostimportant ows of time. In particular, we have the following result due to Scottand Lindstr�om (unpublished); for a proof see e.g. [Gabbay et al., 1994]):Theorem 19. The satis�ability problem for FOT L-formulas in models basedon hR; <i, hZ; <i, or hN; <i is not recursively enumerable.Moreover, even seemingly simple fragments, such as the two-variable frag-ment of FOT L (containing formulas with the variables x; y only) and themonadic fragment of FOT L (containing fomulas with unary predicates only),are undecidable in any natural class of ows of time [Merz, 1992; Hodkinsonet al., 2000]. These `negative' results have been a serious obstacle for applying�rst-order temporal logic in computer science and AI.A certain breakthrough has been recently achieved in [Hodkinson et al., 2000;Wolter and Zakharyaschev, 2001], where a so-calledmonodic fragment of FOT Lwas shown to have a much better computation behavior. The monodic fragmentconsists of those FOT L-formulas that do not contain a subformula startingwith S or U and having more than one free variable. Unlike the full FOT L,the set of monodic formulas valid in models based on hN; <i turns out to beaxiomatizable. Various decidable subfragments of the monodic fragment aredescribed in [Hodkinson et al., 2000; Wolter and Zakharyaschev, 2001]. Inparticular, the following results will be used later on in this paper:Theorem 20. (i) Let C be one of the following classes of ows of time: the classof all strict linear orders, fhQ; <ig, fhZ;<ig, fhN; <ig. Then the satis�abilityproblem for the one-variable fragment of FOT L in models based on ows oftime in C is decidable.(ii) Let C+ be one of the classes mentioned above or fhR; <ig. Then thesatis�ability problem for the one-variable fragment of FOT L in models basedon ows of time in C+ and having �nite �rst-order domains is decidable.(iii) In both cases, the satis�ability problem in models based on hN; <i orhZ; <i is EXPSPACE-complete.(The complexity of satis�ability in the ows of time di�erent from hN; <iand hZ; <i remains an open problem.)Let us now turn to branching time. Given a tree F = hW;<i, a set ofhistories H in F, and a function m of the form (5), we can form the �rst-order18

branching time model M = hF;H;mi. Having �xed an assignment a in D, wede�ne the truth-relation j= between pairs (h;w) and formulas ' of the �rst-orderbranching temporal logic FOBT L by taking� (h;w) j=a 2' i� (h0; w) j=a ' for all h0 2 H(w)and keeping the other inductive clauses similar to the linear case. The resultinglogic is at least as complex as FOT L on hN; <i; hence it is highly undecidable.However, again the monodic fragment (consisting of all FOBT L-formulas inwhich none of the temporal and modal operators has more than one free variablein its scope) provides us with ways of obtaining decidable fragments [?]. In Ref?particular, the following holds:Theorem 21. (i) The satis�ability problem for the one-variable fragment ofFOBT L is decidable.(ii) The satis�ability problem for the one-variable fragment of FOBT L inmodels with �nite �rst-order domains and �nite sets of histories is decidable. Complexity?3.4 Interval temporal logicSimilar to RCC-8, instead of time points one can take extended time entities, i.e.,intervals, as primitives. This approach to temporal representation and reasoningre ects the fact that certain assertions can be evaluated only at periods of time(e.g. `John often drinks beer'). It was developed by Allen [1983; 1984], whoobserved, in particular, that relative positions of any two intervals i and j ofa strict linear order can be described by precisely one of the thirteen basicinterval relations: before(i; j), meets(i; j), overlaps(i; j), during(i; j), starts(i; j),�nishes(i; j), their inverses (i.e., before(j; i), meets(j; i), etc.), and equal(i; j).Let us denote by A``-13 the language whose alphabet contains the thirteenbinary predicate symbols as above, interval variables i, j, etc., and the Booleans.Formulas of A``-13 are just Boolean combinations of the basic predicates.To provide a semantics for A``-13 formulas, suppose that the ow of time isa strict linear order F = hW;<i. An assignment in F is a function a mapping theinterval variables into temporal intervals in F. There may be di�erent views onwhat the temporal intervals in F should be. We take perhaps the most `liberal'version by de�ning them as arbitrary non-empty convex sets in F. In otherwords, a temporal interval a(i) in F is a non-empty subset of W such that8x; y 2 a(i) 8z 2W (x < z < y ! z 2 a(i)):The truth-relation F j=a ' for atomic A``-13 formulas is de�ned in the naturalway. For instance,F j=a meets(i; j) i� 8x; y (x 2 a(i) ^ y 2 a(j)! x < y ^ 8z(x < z < y! z 2 a(i) _ z 2 a(j)));F j=a overlaps(i; j) i� a(i) \ a(j) 6= ; ^ 9x; y (x < y^ x 2 a(j) ^ x =2 a(i) ^ y 2 a(j) ^ y =2 a(i));F j=a starts(i; j) i� a(i) � a(y) ^ a(i) 6= a(j) ^ 8x; y (x < y^ x 2 a(j) ^ y 2 a(i) \ a(j)! x 2 a(i));F j=a during(i; j) i� 9x; y; z (x < y < z ^ x 2 a(j) ^ x =2 a(i)^ y 2 a(i) ^ z 2 a(j) ^ z =2 a(i)):19

We say that ' is satis�able in a class C of ows of time if F j=a ' holds for someF 2 C and assignment a in F.Usually A``-13 serves as a basis for more complex languages which, besidestemporal constraints, use other predicates such as HOLDS(�; i) (property �holds during interval i), OCCUR(e; i) (event e happens over interval i). Someexamples will be provided in Section 4.3.The following result was shown in [van Beek et al., 1986]:Theorem 22. The satis�ability problem for A``-13 formulas in any class oflinear ows of time is NP-complete.Note also that A``-13 can be easily embedded into point-based temporallogic; for details see [Blackburn, 1993].4 Of space and timeFollowing our semantical approach, we start designing logics of time and spaceby de�ning their intended models|spatio-temporal structures|as a combina-tion of topological and temporal models. We consider �rst the linear point-basedparadigm.4.1 Spatio-temporal logics: linear point-based timeDe�nition 23 (topological temporal model). A topological temporal model(or tt-model , for short) based on a topological model S of the form (4) and a ow of time F = hW;<i is simply the pair M = hS;Fi. An assignment in M isa function a associating with each region variable X and each moment of timew 2W a set a(X;w) 2 R(T), the state of X at w.Thus, tt-models can be regarded as two-dimensional structures. Having�xed a moment of time, we can move in the `spatial dimension' representingthe states of regions at this moment. Having �xed a spatial region, we canmove along the `temporal dimension' tracing the evolution of this region intime. (Note the di�erence from �rst-order temporal models in which the valuesof individual variables are constant over time, while the extensions of predicatesymbols can vary.)Let us turn now to the syntactical parameters of spatio-temporal hybrids.4.1.1 Quanti�cation over regionsUnfortunately, quanti�cation over region variables in tt-models|even for ex-tremely weak languages|results in undecidable or non-axiomatizable logics.We show here only one example. Consider the �rst-order spatio-temporal lan-guage FOST based on the following alphabet:� an in�nite set of local region variables X0; X1; : : : ;� an in�nite set of global region variables Y0; Y1; : : : ;� the binary temporal operator U (`until');� the binary predicate EQ(Z1; Z2);20

FOST -formulas are de�ned as follows:� EQ(Z1; Z2) is an atomic formula, where Z1; Z2 are region variables;� if ' and are formulas and X is a global region variable, then :', '^ ,and 8X' are formulas.The di�erence between local and global region variables is that the former rangeover `mobile' regions, while the latter denote regions that are supposed to beimmovable. Thus, an assignment a in a tt-model M = hS;Fi should be suchthat a(Yi; u) = a(Yi; v) for any time points u and v in F and any global variableYi. The de�nition of the truth-relation must be clear: we put(M; w) j=a EQ(Z1; Z2) i� a(Z1; w) = a(Z2; w)and de�ne the Booleans, quanti�ers, and the temporal operator in the standardway.Thus, in this language we can reason about the equality of regions overtime, but nothing else. The language looks completely `harmless.' And yet, thefollowing is easily derived from results of [Merz, 1992]:Theorem 24. The satis�ability problem for FOST -formulas in tt-models basedon in�nite ows of time is undecidable; it is not even recursively enumerable forthe ows hN; <i and hZ;<i.The reason explaining such a `bad' computational behavior is the interactionbetween the temporal operator and the quanti�ers over region variables, whichis similar to the interaction between the compass operators in Example 1. Againwe are forced to omit quanti�cation and take BRCC-8 as the spatial componentof the spatio-temporal logics to be constructed.4.1.2 Spatio-temporal representation based on BRCC-8In this section, we construct three spatio-temporal logics based on BRCC-8. Wedenote them by ST 0{ST 2.ST 0. The simplest one allows applications of the temporal operators S and Uonly to BRCC-8 formulas. More precisely, the spatio-temporal language ST 0 isde�ned as follows. Every formula of BRCC-8 is also an ST 0-formula, and if 'and are ST 0-formulas then so are 'S , 'U , ' ^ , and :'. As usual, weuse the abbreviations ' = ?U', 3F' = >U', 2F' = :3F:'; a new oneis 'W = 2F' _ ('U ), where W stands for `waiting for' (it is also known as`unless;' see [Manna and Pnueli, 1992]).For a tt-model M = hS;Fi, an assignment a in it, an ST 0-formula ', anda time point w in F, de�ne the truth-relation (M; w) j=a ' by induction on theconstruction of '. Let aw be the assignment in S de�ned by aw(X) = a(X;w),for every region variable X . Now,� if ' contains no temporal operator, then (M; w) j=a ' i� S j=aw ';� (M; w) j=a 'U i� there is v > w such that (M; v) j=a and (M; u) j=a 'for every u in the interval w < u < v;21

� (M; w) j=a 'S i� there is v < w such that (M; v) j=a and (M; u) j=a 'for every u in the interval v < u < w.The interaction between time and space in ST 0 is rather weak. In fact, sat-is�ability of ST 0-formulas in a given in�nite ow of time F is easily, but ex-ponentially, reducible to satis�ability of PT L-formulas in F. (As we saw inSection 2.2.3, BRCC-8 is reducible to S5, which, in turn, can be exponentiallyreduced to PT L.) Moreover, for hN; <i a PSPACE satis�ability checking algo-rithm was constructed in [Wolter and Zakharyaschev, 2000b]. To sum up, usingTheorem 15, we obtain:Theorem 25. Let C+ be one of the classes de�ned in Section 3.3. Then thesatis�ability problem for ST 0-formulas in tt-models based on ows of time inC+ is decidable in EXPSPACE. For hN; <i it is PSPACE-complete.It is an open problem whether satis�ability of ST 0-formulas in ows di�erentfrom hN; <i can be checked in PSPACE as well.The language ST 0 is expressive enough to capture some aspects of continuityof changes (see e.g. [Cohn, 1997]):DC(X;Y )! DC(X;Y )W EC(X;Y );EC(X;Y )! EC(X;Y )W (DC(X;Y ) _ PO(X;Y ));PO(X;Y )! PO(X;Y )W (EC(X;Y ) _TPP(X;Y ) _ EQ(X;Y ) _ TPPi(X;Y ));etc.The �rst of these formulas, for instance, says that if two regions are disconnectedat some moment, then either they will remain disconnected forever or they aredisconnected until they become externally connected. If the ow of time isdiscrete then these conditions are equivalent to:DC(X;Y )! (DC(X;Y ) _ EC(X;Y ));EC(X;Y )! (EC(X;Y ) _DC(X;Y ) _ PO(X;Y ));PO(X;Y )! (PO(X;Y ) _ EC(X;Y ) _TPP(X;Y ) _ EQ(X;Y ) _ TPPi(X;Y ));etc.However, the expressive power of ST 0 is rather limited. In particular, wecan compare regions only at one moment of time, but we are not able to connecta region as it is `today' with its state `tomorrow' to say, for example, that it isexpanding or remains the same. In other words, we can express the dynamicsof relations between regions, say,:2FP(Kosovo; Y ugoslavia)(`it is not true that Kosovo will always be part of Yugoslavia'), but not thedynamics of regions themselves, for instance, that2FP(EU; EU);where EU at moment n intends to denote the space occupied by the EU atthe next moment (so for the ow of time hN; <i, the last formula means: `the22

EU will never contract'). This new constructor may also be important to re�nethe continuity assumption by requiring that2F (EQ(X; X) _ O(X; X));i.e., `regions X and X either coincide or overlap.'ST 1. To capture this dynamics, we extend ST 0 by allowing applications ofthe next-time operator not only to formulas but also to Boolean region terms.Thus, arguments of RCC-8 predicates can be now arbitrary -terms which areconstructed from region variables using the Booleans and . For instance, X represents region X as it will be `the day after tomorrow.' Denotethe resulting language by ST 1, and let ST 01 be its sublanguage with only onetemporal operator (S and U are not allowed). Obviously, ST 1 is moreexpressive than ST 0 only for discrete ows of time; in dense ows like hQ; <ior hR; <i the `next-time' operator makes no sense. IfM = hS;Fi is a tt-model,a an assignment in it, and t a -term, then we puta( t; w) = � a(t; w0) if w0 is an immediate successor of w in F,; if w has no immediate successor in F.Theorem 26. (i) The satis�ability problem for ST 1-formulas in tt-models basedon ows of time in C is decidable; for hN; <i and hZ; <i it is decidable in EX-PSPACE.(ii) The satis�ability problem for ST 01-formulas in tt-models based on hN; <iis NP-complete.The EXPSPACE-upper bound and (ii) are proved in [Wolter and Zakharyaschev,2000b]. A proof of (i) based on an embedding into �rst-order temporal logic issketched below and given in detail in [Gabbay et al., 2001]. (The lower boundis still unknown.)Using ST 1 we can express in hN; <i that region X will always be the same,i.e., X is global (or rigid): 2FEQ(X; X);or that it has at most two distinct states, one on `even days,' another on `oddones:' 2FEQ(X; X):Note, by the way, that the ST 1-formula2FNTPP(X; X)is satis�able only in models based on in�nite topological spaces|unlike BRCC-8formulas, for which �nite topological spaces are enough (see Theorem 10).It may appear that ST 1 is able to compare regions only within �xed timeintervals. However, using an auxiliary global variable X we can write, for in-stance, 2FEQ(X; X) ^3FEQ(X;EU) ^ P(Russia;X):This formula is satis�able i� `some day in the future the present territory ofRussia will be part of the EU.' Note that the formula3FP(Russia; EU)23

means that there will be a day when Russia|its territory on that day (say,without Chechnya but with Byelorussia)|becomes part of the EU.Imagine now that we want to express in our spatio-temporal language thatall countries in Europe will pass through the euro-zone, but only Germany (inits present territory) will use the euro forever. Unfortunately, we don't knowwhich countries will be formed in Europe in the future, so we can't simply writedown all formulas of the form3FP(X;Euro-zone):What we actually need is the possibility of constructing regions 3FX and 2FXwhich contain all the points that will belong to region X in the future and onlycommon points of all future states of X , respectively. Then we can write:EQ(Europe;3FEuro-zone) and EQ(Germany;2FEuro-zone):The formula P(Russia;3FEU) says that all points of the present territory ofRussia will belong to the EU in the future (but perhaps at di�erent momentsof time).ST 2. So let us extend ST 0 by allowing the use of temporal region terms , con-structed from region variables, the Booleans, and the temporal operators U andS with all their derivatives, as arguments of the RCC-8 predicate. The resultinglanguage will be denoted by ST 2. The intended semantics of temporal regionterms is as follows. Suppose M = hS;Fi is a tt-model and a an assignment init. De�ne inductively the value a(t; w) of a temporal region term t under a atw in M by taking:a(3F t; w) = C I [v>wa(t; v);a(2F t; w) = C I \v>wa(t; v);a(t1Ut2; w) = C Ifx : 9v > w (x 2 a(t2; v) ^ 8u (w < u < v ! x 2 a(t1; u)))g;a(t1St2; w) = C Ifx : 9v < w (x 2 a(t2; v) ^ 8u (w > u > v ! x 2 a(t2; u)))g;and the corresponding clauses for 3P and 2P . For example, the formulaDC(Russia S Russian Empire;Russia S Germany)can be used to say that the part of Russia that has been remaining Russiansince 1917 is not connected to the part of Germany (K�onigsberg) that becameRussian after the Second World War.We remind the reader that we have to use the pre�x C I in the right-handparts of the de�nition above because in�nite unions and intersections of regularclosed sets are not necessarily regular closed (see (1); however, this is the case formodels based on Kripke spaces), while all temporal region terms are supposedto be interpreted by `regions' of topological spaces.8 Actually, as we shall see8It is also worth noting that the operators 3F and 2F on temporal region terms aredual in the sense that for every assignment a, every term t, and every moment w we havea(3F t; w) = a(:2F:t; w). 24

below, in�nite operations bring various semantical complications. To avoid thisproblem we can try to restrict assignments in models in such a way that in�niteintersections and unions can be reduced to �nite ones. There are di�erent waysof doing this. One idea would be to accept the Finite Change Assumption:FCA No region can change its spatial con�guration in�nitely often.This means that under FCA we consider only those assignments a in tt-modelsM = hS;Fi that satisfy the following condition: for every temporal region termt there are pairwise disjoint convex sets I1; : : : ; In of points in F = hW;<i suchthat W = I1 [ � � � [ In and the state of t remains constant on each Ij , i.e.,a(t; u) = a(t; v) for every u; v 2 Ij . Note that for the ow F = hN; <i, FCA canbe captured by the ST 1-formulas 3F2FEQ(t; t).Of course, FCA excludes some mathematically interesting cases. Yet, it isabsolutely adequate for many applications, for example, when we are planninga job which eventually must be completed (consider a robot painting a wall).Optimists would accept FCA to describe the geography of Europe in the exam-ples above. In temporal databases the time line is often assumed to be �nite,though arbitrarily long, which corresponds to FCA. Another, more general,way of reducing in�nite unions and intersections to �nite ones is to adopt theFinite State Assumption:FSA Every region can have only �nitely many possible states (although itmay change its states in�nitely often).Say that a tt-model M = hS;Fi with an assignment a satis�es FSA, oris an FSA-model , if for every temporal region term t there are �nitely manysets A1; : : : ; Am 2 R(T) such that fa(t; w) : w 2 Wg = fA1; : : : ; Amg. Thesemodels can be used, for instance, to capture periodic uctuations due to seasonor climate changes, say, a daily tide.Theorem 27. (i) The satis�ability problem for ST 2-formulas in FSA-modelsbased on ows of time in C+ is decidable; for hN; <i and hZ;<i it is decidablein EXPSPACE.(ii) An ST 2-formula is satis�able in an FSA-model i� it is satis�able in anFSA-model based on a �nite topological space.For the ow hN; <i this result is proved in [Wolter and Zakharyaschev, 2000b]. Aproof of the general result is provided in [Gabbay et al., 2001]. It is based on anembedding into �rst-order temporal logic and sketched below. The complexityof the satis�ability problem in (i) is unknown.It is worth noting that, instead of the propositional temporal language PT L,we could have combined with BRCC-8 the �rst-order language L<. We wouldthen obtain a two-sorted language with variables t of sort `time' ranging overtime points and variables X of sort `region' ranging over regions in topologi-cal spaces. The new ingredient would be eight ternary predicates DC(t;X; Y ),EC(t;X; Y ), etc., the intuitive meaning of which is `at moment t, region X isdisconnected from region Y ', etc. Similarly to Kamp's theorem on the expres-sive equivalence of L< and PT L, one can show that certain two-sorted logicshave the same expressive power as certain logics in the ST i-hierarchy.25

4.1.3 ExampleWe illustrate possible applications of the language introduced in the previoussection by showing a toy spatio-temporal knowledge base. Consider the followingscenario of how the foot and mouth epidemic spreads across a country. Assumethat the country consists of disjoint regions: farms, towns, forests, rivers, etc.The map of the country can clearly be represented as a database of RCC-8formulas. Besides, we require that all these regions are rigid, i.e., 2+FEQ(X; X)(as quanti�cation over regions is not allowed, we have to write such formulasfor all regions X on the map). Now, suppose that at moment 0 foot and mouthhas been detected only at one farm X0:EQ(F&M; X0) ^ P(X0;Farm):The region F&M, representing the current contaminated part of the country, isnot rigid. Nor is the region Stock representing the farms with live-stock. LetX0; : : : ; Xn be all the farms in the country. We then should clearly have, for alli � n: 2+F �O(Xi;Stock)! P(Xi;Stock)�:2+FP(Stock; X0 t � � � tXn):2+F �(O(Xi; F&M)! P(Xi;F&M)�:2+FP(F&M;Stock):Suppose also that if one farm su�ers from foot and mouth, then at the nextmoment the disease will spread to all neighboring farms with stock, but notfurther, i.e., for all i; j � n,2+F �P(Xi;F&M) ^ EC(Xi; Xj) ^ P(Xj ;Stock)! P(Xj ;F&M)�:2+F �:EC(Xi;F&M)! :P(Xi;F&M)�:As the government takes proper measures against the disease, in a few moments(say, two for de�niteness), a farm with foot and mouth will have no live-stock.On the other hand, the government is going to help the farmers to continuetheir business, so eventually new stock will be purchased (but nobody knowswhen): 2+F�P(Xi;F&M)! �:O(Xi;F&M) ^ :O(Xi;Stock)��:2+F �P(Xi;Stock)! 3FP(Xi;Stock)�:Denote the resulting knowledge base by �. We can use it to answer querieslike `how much time the government needs to get rid of the disease' or `when itis safe to buy new animals,' for instance, by checking whether formulas of theform � � � EQ(F&M;?): � � � �:3FP(Xi;F&M)�are logical consequences of �. 26

It is worth noting that in this example we have a typical mixture of `a sortof' model checking and deduction: while the map of the country is simulated bytaking all RCC-8 relations which hold true between farms, towns, forests, etc.,knowledge about uents like F&M and Stock is incomplete, since it dependson the future development. So to decide whether � j= ' holds or not properdeduction (or theorem proving) is required (cf. [Halpern and Vardi, 1991]).4.1.4 Modal formalisms for spatio-temporal reasoningWe saw in Section 2.2.4 that BRCC-8 can be embedded into the bimodal logicS4u (which yields decidability) and then into the one-variable fragment of classi-cal �rst-order logic (which yields NP-completeness). Similarly, the constructedtemporalizations of BRCC-8 can be translated into the language PST , or propo-sitional spatio-temporal language, that contains the temporal operators S andU , and the `spatial' operators of S4u (i.e., I , 28 and their duals). The in-tended models of PST , called topological PST -models , are triples of the formN = hT;F;Ui, in which T = hU; Ii is a topological space, F = hW;<i a ow oftime, and U is a valuation associating with every propositional variable p andevery w 2W a set U(p; w) � U . U is then extended to arbitrary PST -formulasin the following way:� U( ^ �;w) = U( ;w) \ U(�;w);� U(: ;w) = U � U( ;w);� U(28 ;w) = U if U( ;w) = U , and U(28 ;w) = ; otherwise;� U(I ;w) = IU( ;w);� x 2 U( U�;w) i� there is v > w such that x 2 U(�; v) and x 2 U( ; u)for all u 2 (v; w);� x 2 U( S�;w) i� there is v < w such that x 2 U(�; v) and x 2 U( ; u)for all u 2 (v; w).In particular,� U(3F ; v) = [v>wU( ; v), U(2F ;w) = \v>wU( ; v).A PST -formula ' is satis�ed in N if U(';w) 6= ; for some w 2W .Say that a topological PST -model N = hT;F;Ui satis�es FSA if, for everyvariable p, there are �nitely many sets U1; : : : ; Un � U such thatfU(p; w) : w 2Wg = fU1; : : : ; Ung:We can now extend the translation �� from BRCC-8 into S4u, de�ned inSection 2.2.4, to a translation from ST 2-formulas into the language of PST .For temporal region terms we need two extra clauses:(t1 U t1)� = CI(t�1 U t�2);(t1 S t1)� = CI(t�1 S t�2):27

Note that we then also have:( t)� = t�; (3F t)� = CI3F t�; (2F t)� = CI2F t�:For atomic ST 2-formulas P (t1; t2), the translation P (t1; t2)� is de�ned in pre-cisely the same way as in Section 2.2.4. Suppose now that ' is an arbitraryST 2-formula. Then '� denotes the result of replacing all occurrences of atomsP (t1; t2) in ' with (P (t1; t2))�. It should be clear from the de�nition that wehave:Theorem 28. An ST 2-formula ' is satis�able in a tt-model (with FSA) basedon a ow of tiem F i� '� is satis�able in a topological PST -model (with FSA)based on F.Unfortunately, we can't conclude from this result that ST 2 is decidable. Itis a challenging open problem to �nd out whether satis�ability of PST -formulasin arbitrary topological models, or even only in those based on Kripke spaces,is decidable.Note that the PST -formula 3FCp $ C3Fp is valid in all PST -modelsbased on Kripke spaces, but not on arbitrary topological spaces, simply becausethere is an in�nite sequence of closed sets in R the union of which is not closed.However, the two types of models turn out to be equivalent with respect to themodal translations of (a) ST 1-formulas, and (b) ST 2-formulas provided thatmodels satisfy the �nite state assumption FSA. Moreover, in both cases wecan again take advantage of the special form of these translations and showthat PST -models based on quasisaw Kripke spaces are enough to satisfy allsatis�able formulas (see [Gabbay et al., 2001] for a proof):Theorem 29. (i) An ST 2-formula ' is satis�ed in a tt-model with FSA basedon a ow of time F i� '� is satis�ed in a PST -model with FSA based on Fand a quasisaw Kripke space.(ii) An ST 1-formula ' is satis�ed in a tt-model based on a ow of time Fi� '� is satis�ed in a PST -model based on F and a quasisaw Kripke space.We can now use this result to `lift' the translation �y of BRCC-8 formulas intothe one-variable fragment of �rst-order logic to a translation of ST 2-formulasinto the one-variable fragment of �rst-order temporal logic. This can be doneby adding to the de�nition of the translations �b, �l, and �r in Section 2.2.4 twomore clauses: ('U )i = 'i U i; for i = b; l; r;('S )i = 'i S i; for i = b; l; r:Given an ST 2-formula ', we put 'y = ('�)b. Note that, as before, 'y containsa single individual variable.Theorem 30. Suppose F is a ow of time and ' an ST 2-formula. Then thefollowing conditions are equivalent:1. '� is satis�able in a PST -model (with FSA) based on F and a quasisawKripke space;2. 'y is satis�able in a �rst-order temporal model based on F (and having a�nite domain). 28

Now a proof of Theorem 26 (i) is obtained by combining Theorem 20 (i) and(iii) with Theorem 29 (ii) and Theorem 30. A proof of Theorem 27 (i) followsfrom Theorem 20 (ii), (iii), and Theorems 29 and 30.4.1.5 Temporal models based on Euclidean spacesAs we observed in Section 2.2.2, there exist satis�able BRCC-8 formulas thatare not satis�able in any connected (in particular, Euclidean) topological space.A simple example is the conjunction ' of the following predicates:EQ(X1 tX2; Y ); NTPP(X1; Y ); NTPP(X2; Y ); DC(Y; Z):Clearly, ' is satis�ed in the discrete space with three points. Note now that if' holds in some topological space, then X1 t X2 is closed and included in theinterior of Y . On the other hand, it coincides with Y . Hence, Y is both closedand open. However, Y is not the whole space because it is disjoint with Z.A similar e�ect can be achieved in the spatio-temporal case even withoutusing the Boolean operations on region terms simply because unions of regionsare implicitly available in ST 2 in the form of 3F . Consider, for instance, theconjunction of the predicates:EQ(3FX;Y ); NTPP( X;Y ); NTPP( 3FX;Y ); DC(Y; Z):One can readily check that is satis�able in some tt-model with FSA, but notin a model based on a connected topological space, in particular Rn , for anyn � 1.It is an interesting open problem whether satis�ability of ST 2-formulas (withor without the Booleans on region terms) in models (with FSA) based on Eu-clidean spaces is decidable (cf. [Renz, 1998]). We only know that the followingholds (see [Wolter and Zakharyaschev, 2000b] for a proof):Theorem 31. If a set of ST 1-formulas without Boolean operations on regionterms is satis�able in a tt-model based on hN; <i, then it is also satis�able in amodel based on hN; <i and Rn , for any n � 1.4.2 Spatio-temporal logics of branching timeIn the framework of linear time spatio-temporal logics, we can say, for instance,that the UK will join the euro-zone: 3FP(UK;Euro-zone). We can also saythat this will never happen. But we are not able to convey the reality, viz., thatboth variants are possible:33FP(UK;Euro-zone) ^3:2FP(UK;Euro-zone):Nor can we make the foot and mouth scenario above more realistic by sayingthat the disease possibly spreads to the neighboring farms. In this section, weshow how the spatio-temporal formalisms developed so far can be extended tothe branching time paradigm capable of making assertions about alternativehistories.At the syntactical level we have two options: to allow applications of 2 and3 only to ST i-formulas, or to both formulas and temporal region terms. Theresulting languages will be denoted by ST Bi (the former option) and ST B+i (the29

latter one). In the latter case, we also have to update the notion of temporalregion term by adding to its de�nition the clause: if t is a temporal region term,then so are 2t and 3t. For example, the following ST B+2 -formula22F �EQ(Europe; Europe) ^ P(EU;Europe)� ^P(Europe;3 EU) ^ P(2 EU;EU)says that, whatever happens, the region occupied by Europe will always remainthe same and the EU will be part of Europe; moreover, every part of Europe hasa possibility to join the EU next year, while, on the hand, what will certainlybelong to the EU next year, is only part of the EU as it is today.The extension of tt-models to branching time topological models is straight-forward:De�nition 32 (branching tt-models). A branching time topological model(a btt-model, for short) is a triple M = hS;F;Hi, where S is a topologicalmodel, F = hW;<i a tree, and H a set of histories in F. An assignment a in Massociates with every region variable X and every w 2 W a set a(X;w) 2 R(T).Given a region term t, a time point w 2 W , and a history h 2 H, de�ne thevalue a(t; h; w) of t at w relative to h inductively by takinga(X;h;w) = a(X;w); X a region variable;a(3t; h; w) = C I [h02H(w) a(t; h0; w);a(2t; h; w) = C I \h02H(w) a(t; h0; w);a(tU s; h; w) = C Ifx 2 U : 9v > w (v 2 h ^ x 2 a(t; h; v) ^8u 2 (w; v) x 2 a(s; h; u)g;the standard clauses for the Booleans and a dual clause for S. Now, for aformula ' and a pair (h;w), the truth of ' at (h;w) inM is de�ned inductivelyas follows:� (h;w) j=a P (s; t) i� S j= P [a(s; h; w); a(t; h; w)], for atomic P (s; t);� (h;w) j=a U � i� there is v > w such that v 2 h, (h; v) j=a �, and(h; u) j=a for all u 2 (w; v);� (h;w) j=a 3' i� there is h0 2 H(w) such that (h0; w) j=a ';� (h;w) j=a 2' i� (h0; w) j=a ' for all h0 2 H(w),plus the standard clauses for the Booleans and S.The computational behavior of the spatio-temporal logics of branching timeis similar to that we have observed above in the linear case. First, we have:Theorem 33. There is an algorithm which, given an ST B1-formula ', decideswhether ' is satis�able in a btt-model or not.This result can be proved by extending the embedding of ST 1 into FOT Lto an embedding of ST B1 into the one-variable fragment of FOBT L and then30

applying Theorem 21 (i). No signi�cant result on the computational complexityof ST B1-formulas has been obtained yet.As to satis�ability of ST B+i -formulas, we again face the problem of in�nitaryoperations on temporal spatial terms. Now, besides the temporal operators, thespatial terms can also be a�ected by the modal operators 2 and 3. Say that abtt-model M = hS;F;Hi is a �nite branching model if the set H of histories init is �nite. The �nite state assumption FSA is applied now to each history.Theorem 34. (i) It is decidable whether an ST B+1 -formula is satis�able in a�nite branching model.(ii) It is decidable whether an ST B+2 -formula is satis�able in a �nite branch-ing model with FSA.The proof is conducted by embedding ST B+2 into the one-variable fragmentof FOBT L and applying Theorem 21 (ii). Nothing is known about the com-putational complexity of these satis�ability problems yet. The decidability ofthe satis�ability problem for ST B+2 -formulas in arbitrary btt-models or only inthose based on Euclidean spaces is also open.4.3 BRCC-8 +A``-13Since the region-based approach to spatial reasoning was inspired by and closelymirrors the interval-based approach to temporal reasoning|they both take ex-tended entities rather than points as primitives|it would seem far more naturalto temporalize BRCC-8 by combining it with an interval based temporal logic.In this section we show a variant of such a combination.Following [Allen, 1984] we write HOLDS('; i) to say that a formula ' holdsduring a time interval i. For example, HOLDS�PO(X;Y ); i� means that duringinterval i regions X and Y partially overlap. Let us call an ARCC-8 formulaany Boolean combination of atomic A``-13 formulas, and formulas of the formHOLDS('; i), where ' is a BRCC-8 formula.ARCC-8 formulas are interpreted in standard topological temporal modelsM = hS;Fi based on linear ows of time. The only essential di�erence is thatnow an assignment a inM associates with every interval variable i a non-emptyconvex set a(i) in F, and with every region variable X and every time point w itassociates a regular closed set a(X;w) in S. The truth-relation for the A``-13atomic formulas is de�ned as in Section 3.4, and HOLDS('; i) is true in M i�for every point w 2 a(i), we have S j=aw ' (as de�ned in Sections 2.2.1 and2.2.2).Here is a simple example of a `knowledge base' � in this unsophisticatedlanguage:meets(i; j) ^ during(i; k) ^ during(j; k):HOLDS�TPP(Hong Kong;UK) ^ EC(Hong Kong;China); i�:HOLDS�DC(Hong Kong;UK); j�:HOLDS�EC(UK;China) _ DC(UK;China); k�:If � is true in a tt-model M under an assignment a, then the formula 'HOLDS�EC(UK;China); i�31
also holds in M under a, i.e., ' is a logical consequence of �.A straightforward combination of the satis�ability checking algorithms forA``-13 and BRCC-8 yields a satis�ability-checking algorithm for ARCC-8. Moreprecisely, we have the following:Theorem 35. The satis�ability problem for ARCC-8 formulas in tt-models isNP-complete.An interesting open problem is to �nd tractable fragments of ARCC-8, forinstance, by combining tractable fragments of RCC-8 and A``-13 [Nebel andB�urckert, 1995; Renz and Nebel, 1999].As was noted in Section 3.4, A``-13 can be embedded into propositionaltemporal logic. Together with the modal translation of BRCC-8, this yields anembedding of ARCC-8 into the language PST interpreted in topological PST -models based on linear ows of time, and then into the one-variable fragment of�rst-order temporal logic. For details the reader is referred to [Bennett et al.,2001; Gabbay et al., 2001].5 Concluding remarksNow, as we have constructed a family of decidable spatio-temporal formalisms,a natural question is whether they are `implementable.'5.1 Implementable algorithmsThe satis�ability problems for all our logics are polynomially reducible to thesatis�ability problems for the one-variable fragments of �rst-order temporal log-ics. We have also seen that usually these fragments are decidable. So the ques-tion is whether they can be supported by `practical' decision procedures.One idea would be take advantage of the fact that the one-variable (andother monodic) fragments of many temporal logics are embeddable into monadicsecond-order logic (in the case of FCA or FSA even weak monadic second-orderlogic may be enough) [Hodkinson et al., 2000] and use provers like MONA (seee.g. [Klarlund et al., 2000] and references therein). Unfortunately, however, thetranslation from [Hodkinson et al., 2000] is exponential, which will make theprover's job much harder.On the other hand, a tableau decision procedure for the one-variable frag-ment of �rst-order temporal logic based on hN; <i has been developed in [Lutz etal., 2001] as a combination of Wolper's [1985] tableau for PT L and a standardtableau for (the one-variable fragment of) �rst-order logic. Currently, a similartableau-based procedure is being implemented for temporal description logic[G�unsel and Wittmann, 2001], and we expect signi�cant experimental resultson the e�ciency of the procedure shortly. Positive results would allow the con-struction of a practical system for the language ST 1 (without S) interpreted intt-models based on hN; <i and possibly in�nite topological spaces. That wouldalso open the door to an implementation of a decision procedure for ST 2 inmodels based on hN; <i and �nite topological spaces.32

5.2 Further extensionsThe obtained results make only �rst steps in the study of e�ective spatio-temporal formalisms. Many interesting problems remain open for investigation.For instance, it would be interesting and practically important to extend thespatio-temporal logics with constructors allowing us to speak about orienta-tion (say, go West), change, and distances. On the other hand, we also needconstructors to represent properties of regions di�erent from purely spatial ortemporal (e.g. `region X is a tourist attraction accessible only by plane'). Apromising idea is to combine spatio-temporal logics with suitable descriptionlogics (see e.g. [Haarslev et al., 1998]; a combination of description logic withmetric logic has been proposed in [Kutz et al., 2001].)An interesting problem is to �nd and temporalize more expressive and stilldecidable fragments of RCC. For example, one can consider a Datalog-type lan-guage with built-in basic spatial predicates. We could then compose knowledgebases like:P(Y; euro-zone) P(X; euro-zone) ^ EC(X;Y ) ^ PP(Y; europe):P(germany,euro-zone):EC(germany,poland):PP(poland,europe):EC(poland,russia):O(russia,asia):EC(europe,asia):The answer to the query ?P(poland,euro-zone) should be YES, while the an-swer to ?P(russia,euro-zone) should be NO. The language can be extended withBoolean region terms.Till now we have not imposed any restrictions on the form of spatial regions.However, applications in GIS may require to consider only the Euclidean spaceR2 and interpret regions in them as �gures of some special form, say, as circlesor polygons [Grigni et al., 1995]. But it is still an open problem whether thesatis�ability problem for RCC-8 formulas under such interpretations is decidable.A similar question can be asked regarding BRCC-8 and the spatio-temporallogics constructed above.Halpern and Shoham [1991] introduced a modal logic of intervals whosemodal operators correspond to the thirteen relations of Allen's interval logic(see Section 3.4). One can construct a similar modal logic9 of regions with eightmodal operators of the form hTPPi. The intended meaning of these modalitiesis as follows. Suppose we have a topological model S of the form (4) anda region X in T. Then hTPPi' holds at X in S if there is a region Y inT such that TPP(X;Y ) and ' holds at Y . An interesting research problemis to investigate the computational behavior of this logic for di�erent classes oftopological models. (The logic of Halpern and Shoham is undecidable if intervalsare taken on an in�nite time-line.)Acknowledgments. We would like to thank A. Voronkov for stimulating dis-cussions.9The idea is due to C. Lutz. 33

References[Aiello and van Benthem, 2000] M. Aiello and J. van Benthem. Logical patternsin space. In Proceedings of the First CSLI Workshop on Visual Reasoning.CSLI Publishers, Stanford, 2000.[Aiello, 2001] M. Aiello. A spatial similarity measure based on games: theoryand practice. Manuscript, 2001.[Allen, 1983] J. Allen. Maintaining knowledge about temporal intervals. Com-munications of the ACM, 26:832{843, 1983.[Allen, 1984] J F Allen. Towards a general theory of action and time. Arti�cialIntelligence, 23(2):123{154, 1984.[Bennett et al., 2001] B. Bennett, A. Cohn, F. Wolter, and M. Zakharyaschev.Multi-dimensional modal logic as a framework for spatio-temporal reasoning.Applied Intelligence, ??:??{??, 2001.[Bennett, 1994] B. Bennett. Spatial reasoning with propositional logic. In Pro-ceedings of the 4th International Conference on Knowledge Representationand Reasoning, pages 51{62. Morgan Kaufmann, 1994.[Blackburn, 1993] P. Blackburn. Nominal tense logic. Notre Dame Journal ofFormal Logic, 34:56{83, 1993.[B�uchi, 1962] J. B�uchi. On a decision method in restricted second order arith-metic. In Logic, Methodology, and Philosophy of Science, Proceedings of theInternational Congress, pages 1{11, 1962.[Burgess and Gurevich, 1985] J. Burgess and Y. Gurevich. The decision prob-lem for linear temporal logic. Notre Dame Journal of Formal Logic, 26:115{128, 1985.[Burgess, 1979] J. Burgess. Logic and time. Journal of Symbolic Logic, 44:566{582, 1979.[Casati and Varzi, 1999] R. Casati and A. Varzi. Parts and Places. The struc-tures of Spatial Representations. The MIT Press, 1999.[Clarke and Emerson, 1981] E.M. Clarke and E.A. Emerson. Design and syn-thesis of synchronisation skeletons using branching time temporal logic. InD. Kozen, editor, Logic of programs, volume 131 of Lecture Notes in ComputerScience, pages 52{71. Springer-Verlag, 1981.[Clarke et al., 2000] E. Clarke, O. Grumberg, and D. Peled. Model Checking.The MIT Press, 2000.[Clarke, 1981] B.L. Clarke. A calculus of individuals based on `connection'.Notre Dame Journal of Formal Logic, 23:204{218, 1981.[Cohn and Hazarika, 2001] A. Cohn and S. Hazarika. Qualitative spatial rep-resentation and reasoning: an overview. Fundamenta Informaticae, 43:2{32,2001. 34

[Cohn and Varzi, 1998] A. G. Cohn and A. Varzi. Connection relations inmereotopology. In H. Prade, editor, Proceedings of the 13th European Con-ference on Arti�cial Intelligence (ECAI-98), pages 150{154. Wiley, August1998.[Cohn, 1997] A. Cohn. Qualitative spatial representation and reasoning tech-niques. In G. Brewka, C. Habel, and B. Nebel, editors, KI-97: Advancesin Arti�cial Intelligence, Lecture Notes in Computer Science, pages 1{30.Springer-Verlag, 1997.[Dornheim, 1998] C. Dornheim. Undecidability of plane polygonal mereotopol-ogy. In Anthony G. Cohn, Leonard Schubert, and S. Shapiro, editors, Prin-ciples of Knowledge Representation and Reasoning: Proceedings of the 6thInternational Conference (KR'98), pages 342{353. Morgan Kaufman, 1998.[Dummett and Lemmon, 1959] M.A.E. Dummett and E.J. Lemmon. Modallogics between S4 and S5. Zeitschrift f�ur Mathematische Logik und Grund-lagen der Mathematik, 5:250{264, 1959.[Egenhofer and Franzosa, 1991] M Egenhofer and R Franzosa. Point-set topo-logical spatial relations. International Journal of Geographical InformationSystems, 5(2):161{174, 1991.[Egenhofer, 1991] M Egenhofer. Reasoning about binary topological relations.In O Gunther and H J Schek, editors, Proceedings of the Second Symposiumon Large Spatial Databases, SSD'91 (Zurich, Switzerland). Lecture Notes inComputer Science 525, pages 143{160, 1991.[Emerson and Halpern, 1986] E. Emerson and J. Halpern. `Sometimes' and `notnever' revisited: on branching versus linear time. Journal of the ACM, 33:151{178, 1986.[Gabbay et al., 1994] D. Gabbay, I. Hodkinson, and M. Reynolds. TemporalLogic: Mathematical Foundations and Computational Aspects, volume 1. Ox-ford University Press, 1994.[Gabbay et al., 2000] D. Gabbay, M. Reynolds, and M. Finger. Temporal Logic:Mathematical Foundations and Computational Aspects, volume 2. OxfordUniversity Press, 2000.[Gabbay et al., 2001] D. Gabbay, A. Kurucz, F. Wolter, and M. Zakharyaschev.Many-Dimensional Modal Logics: Theory and Applications. Studies in Logic.Elsevier, 2001.[Galton, 1997] A. Galton. Space, time, and movement. In O. Stock, editor, Spa-tial and Temporal Reasoning, pages 321{352. Kluwer Academic Publishers,1997.[Garey and Johnson, 1979] M.R. Garey and D.S. Johnson. Computers and in-tractability. A guide to the theory of NP-completeness. Freemann, San Fran-cisco, 1979.[G�odel, 1933] K. G�odel. Eine Interpretation des intuitionistischen Aus-sagenkalk�uls. Ergebnisse eines mathematischen Kolloquiums, 4:39{40, 1933.35

[Goranko and Passy, 1992] V. Goranko and S. Passy. Using the universalmodality: Gains and questions. Journal of Logic and Computation, 2:5{30,1992.[Gotts, 1996a] N.M. Gotts. An axiomatic approach to topology for spatial in-formation systems. Technical Report 96.25, School of Computer Studies,University of Leeds, 1996.[Gotts, 1996b] N.M. Gotts. Using the RCC formalism to describe the topologyof spherical regions. Technical Report 96.24, School of Computer Studies,University of Leeds, 1996.[Grigni et al., 1995] M. Grigni, D. Papadias, and C. Papadimitriou. Topologicalinference. In Proceedings of IJCAI'95, pages 901{907, 1995.[Grzegorczyk, 1951] A. Grzegorczyk. Undecidability of some topological theo-ries. Fundamenta Mathematicae, 38:137{152, 1951.[Grzegorczyk, 1960] A. Grzegorczyk. Axiomatizability of geometry withoutpoints. Synthese, 12:228{235, 1960.[G�unsel and Wittmann, 2001] C. G�unsel and M. Wittmann. Towards an im-plementation of the temporal description logic T LALC. Manuscript, 2001.[Gurevich, 1964] Y. Gurevich. Elementary properties of ordered Abeliangroups. Algebra and Logic, 3:5{39, 1964. (Russian).[Haarslev et al., 1998] V. Haarslev, C. Lutz, and R. M�oller. Foundations ofspatioterminological reasoning with description logics. In A. Cohn, L. Schu-bert, and S. Shapiro, editors, Principles of Knowledge Representation andReasoning: Proceedings of the Sixth International Conference (KR'98), pages112{124. Morgan Kaufmann, June 1998.[Halpern and Shoham, 1991] J. Halpern and Y. Shoham. A propositional modallogic of time intervals. Journal of the ACM, 38:935{962, 1991.[Halpern and Vardi, 1991] J. Halpern and M. Vardi. Model checking vs. theo-rem proving: a manifesto. In Arti�cial Intelligence and Mathematical Theoryof Comp utation (Papers in Honor of John McCarthy), pages 151{176. Aca-demic Press, San Diego, California, 1991.[Hayes, 1985] Patrick J. Hayes. The second naive physics manifesto. InR. Brachman and H. Levesque, editors, Readings in Knowledge Represen-tation, pages 467{485. Morgan Kaufmann, Los Altos, California, 1985.[Hays, 1989] E. Hays. On de�ning motion verbs and spatial prepositions. Tech-nical report, Universitat des Saarlandes, 1989.[Hodkinson et al., 2000] I. Hodkinson, F. Wolter, and M. Zakharyaschev. De-cidable fragments of �rst-order temporal logics. Annals of Pure and AppliedLogic, 106:85{134, 2000.[Hornsby and Egenhofer, 2000] K. Hornsby and M. Egenhofer. Identity-basedchange: a foundation for spatio-temporal knowledge representation. Interna-tional Journal of Geographical Information Science, 14:207{224, 2000.36

[Horrocks et al., 1999] I. Horrocks, U. Sattler, and S. Tobies. Practical reason-ing for expressive description logics. In Proceedings of the Sixth InternationalConference on Logic for Programming and Automated Reasoning (LPAR'99),pages 161{180, 1999.[Horrocks, 1998] I. Horrocks. Using an expressive description logic: FACT or�ction? In A. Cohn, L. Schubert, and S. Shapiro, editors, Proceedings of theSixth International Conference on Principles of Knowledge Representationand Reasoning, KR'98, Trento, Italy, pages 636{647. Morgan Kaufmann,1998.[Hustadt and Schmidt, 2000] U. Hustadt and R. Schmidt. MSPASS: modal rea-soning by translation and �rst-order resolution. In D. Dyckho�, editor, Pro-ceedings of TABLEAUX 2000, volume 1847 of LNAI, pages 67{71. Springer,2000.[Kamp, 1968] H. Kamp. Tense Logic and the Theory of Linear Order. Ph. D.Thesis, University of California, Los Angeles, 1968.[Klarlund et al., 2000] N. Klarlund, A. M�ller, and M. Schwartzbach. MONAimplementation secrets. International Journal of Foundations of ComputerScience, ??:??{??, 2000.[Kripke, 1963] S. Kripke. Semantical analysis of modal logic, Part I. Zeitschriftf�ur Mathematische Logik und Grundlagen der Mathematik, 9:67{96, 1963.[Kutz et al., 2001] O. Kutz, W. Wolter, and M. Zakharyaschev. A note onconcepts and distances. Manuscript, 2001.[Lamport, 1980] L. Lamport. \Sometimes" is sometimes \not never". In Pro-ceedings of the 7th ACM Symposium on Principles of Programming Lan-guages, pages 174{185, 1980.[L�auchli and Leonard, 1966] H. L�auchli and J. Leonard. On the elementarytheory of linear order. Fundamenta Mathematicae, 59:109{116, 1966.[Levesque and Brachman, 1985] H. Levesque and R. Brachman. A fundamen-tal tradeo� in knowledge representation and reasoning (revised version). InR. Brachman and H. Levesque, editors, Readings in Knowledge Representa-tion, pages 41{70. Morgan Kaufmann, Los Altos, California, 1985.[Lutz et al., 2001] C. Lutz, H. Sturm, W. Wolter, and M. Zakharyaschev. Tem-poralizing tableaux. Manuscript, 2001.[Manna and Pnueli, 1992] Z. Manna and A. Pnueli. The temporal logic of reac-tive and concurrent systems. Springer-Verlag, 1992.[Manna and Pnueli, 1995] Z. Manna and A. Pnueli. Temporal Veri�cation ofReactive Systems: Safety. Springer-Verlag, 1995.[Marx and Reynolds, 1999] M. Marx and M. Reynolds. Undecidability of com-pass logic. Journal of Logic and Computation, 9:897{941, 1999.[McKinsey and Tarski, 1944] J.C.C. McKinsey and A. Tarski. The algebra oftopology. Annals of Mathematics, 45:141{191, 1944.37

[McKinsey, 1941] J.C.C. McKinsey. A solution of the decision problem for theLewis systems S2 and S4, with an application to topology. Journal of Sym-bolic Logic, 6:117{134, 1941.[Merz, 1992] S. Merz. Decidability and incompleteness results for �rst-ordertemporal logics of linear time. Journal of Applied Non-classical Logic, 2,1992.[Meyer, 1975] A. Meyer. Weak monadic second order theory of successor is notelementary-recursive. In Proceedings of Boston Universiti Logic Colloquium,Boston 1972, volume 453 of Lecture Notes in Mathematics, pages 132{154.Springer, 1975.[Muller, 1998] P. Muller. A qualitative theory of motion based on spatio-temporal primitives. In A. Cohn, L. Schubert, and S. Shapiro, editors, Pro-ceedings of the 6th International Conference Principles of Knowledge Repre-sentation and Reasoning, pages 131{142. Morgan Kaufmann, 1998.[Nebel and B�urckert, 1995] B. Nebel and H.-J. B�urckert. Reasoning about re-lations: a maximal tractable subclass of Allen's interval algebra. Journal ofthe ACM, 42:43{66, 1995.[Nebel, 1996] B. Nebel. Arti�cial intelligence: A computational perspective. InG. Brewka, editor, Principles of Knowledge Representation, pages 237{260.CSLI Publications, 1996.[Ono and Nakamura, 1980] H. Ono and A. Nakamura. On the size of refutationKripke models for some linear modal and tense logics. Studia Logica, 39:325{333, 1980.[Orlov, 1928] I.E. Orlov. The calculus of compatibility of propositions. Mathe-matics of the USSR, Sbornik, 35:263{286, 1928. (Russian).[Preparata and Shamos, 1985] F. Preparata and M. Shamos. ComputationalGeometry: An Introduction. Springer, Berlin, 1985.[Prior, 1968] A. Prior. Now. Nous, 2:101{119, 1968.[Rajagopalan and Kuipers, 1994] R. Rajagopalan and B. Kuipers. Qualitativespatial reasoning about objects in motion: application to physics problemsolving. In N. Guarino, editor, Proceedings of IEEE Conference on Arti�cialIntelligence for Applications (CAIA'94), volume 46. San Antonio, 1994.[Randell et al., 1992] D. Randell, Z. Cui, and A. Cohn. A spatial logic basedon regions and connection. In Proceedings of the 3rd International Confer-ence on Knowledge Representation and Reasoning, pages 165{176. MorganKaufmann, 1992.[Renz and Nebel, 1999] J. Renz and B. Nebel. On the complexity of qualitativespatial reasoning. Arti�cial Intelligence, 108:69{123, 1999.[Renz, 1998] J. Renz. A canonical model of the region connection calculus. InProceedings of the 6th International Conference on Knowledge Representationand Reasoning, pages 330{341. Morgan Kaufmann, 1998.38

[Reynolds and Zakharyaschev, 2001] M. Reynolds and M. Zakharyaschev. Onthe products of linear modal logics. In print., 2001.[Reynolds, 2001a] M. Reynolds. The complexity of temporal logic over the reals.Manuscript, 2001.[Reynolds, 2001b] M. Reynolds. The complexity of the temporal logic withUntil over general linear time. Manuscript, 2001.[Reynolds, 2002] M. Reynolds. Axioms for branching time. To appear., 2002.[Russell and Norvig, 1995] S Russell and P Norvig. Arti�cial Intelligence: AModern Approach. Prentice Hall, 1995.[Shehtman, 1999] V. Shehtman. \everywhere" and \Here". Journal of AppliedNon-Classical Logics, 9, 1999.[Sistla and Clarke, 1985] A. Sistla and E. Clarke. The complexity of propo-sitional linear temporal logics. Journal of the Association for ComputingMachinery, 32:733{749, 1985.[Smith and Park, 1992] T. Smith and K. Park. An algebraic approach to spatialreasoning. International Journal of Geographical Information Systems, 6:177{192, 1992.[Spaan, 1993] E. Spaan. Complexity of Modal Logics. PhD thesis, Departmentof Mathematics and Computer Science, University of Amsterdam, 1993.[Sre�k, 1995] M. Sre�k. Introduction to Knowledge Systems. Morgan Kauf-mann, San Francisco, California, 1995.[Stell and Worboys, 1979] J.G. Stell and M.F. Worboys. The algebraic structureof sets of regions. In Stephen C. Hirtle and Andrew U. Frank, editors, SpatialInformation Theory: a theoretical basis for GIS, Proceedings of COSIT'97,volume 1329 of LNCS, pages 163{174, Berlin, October 1979. Springer.[Stell, 2000] J. Stell. Boolean connection algebras: a new approach to the regionconnection calculus. Arti�cial Intelligence, 122:111{136, 2000.[Stock, 1997] O Stock, editor. Temporal and spatial reasoning. Kluwer, 1997.[Stockmeyer, 1974] L. Stockmeyer. The complexity of decision problems in au-tomata theory and logic. PhD thesis, Department of Electrical Engineering,MIT, 1974.[Stone, 1937] M.H. Stone. Application of the theory of Boolean rings to generaltopology. Transactions of the American Mathematical Society, 41:321{364,1937.[Tarski, 1938] A. Tarski. Der Aussagenkalk�ul und die Topologie. FundamentaMathematicae, 31:103{134, 1938.[Thomason, 1984] R.H. Thomason. Combinations of tense and modality. InD. Gabbay and F. Guenthner, editors, Handbook of Philosophical Logic, vol-ume II, chapter 3, pages 135{165. Reidel, 1984.39

[Tsao-Chen, 1938] T. Tsao-Chen. Algebraic postulates and a geometric inter-pretation of the Lewis calculus of strict implication. Bulletin of the AmericanMathematical Society, 44:737{744, 1938.[van Beek et al., 1986] P van Beek, H A Kautz, and M Vilain. Constraint prop-agation algorithms for temporal reasoning: A revised report. In ProceedingsAAAI-86, Philadelphia, August 1986. Revised version in [?].[van Benthem, 1983] J. van Benthem. Modal Logic and Classical Logic. Bib-liopolis, Napoli, 1983.[van Benthem, 1996] J. van Benthem. Temporal logic. In D. Gabbay, C. Hogger,and J. Robinson, editors, Handbook of Logic in Arti�cial Intelligence andLogic Programming, Volume 4, pages 241{350. Oxford Scienti�c Publishers,1996.[Venema, 1990] Y. Venema. Expressiveness and completeness of an intervaltense logic. Notre Dame J. Formal Logic, 31:529{547, 1990.[Vieu, 1991] L Vieu. S�emantique des relations spatiales et inf�erences spatio-temporelles. PhD thesis, Universit�e Paul Sabatier, Toulouse, 1991.[Vieu, 1997] L. Vieu. Spatial representation and reasoning in AI. In O. Stock,editor, Spatial and Temporal Reasoning, pages 5{41. Kluwer Academic Pub-lishers, 1997.[Whitehead, 1929] A N Whitehead. Process and Reality. The MacMillan Com-pany, New York, 1929. Corrected edition published in 1978 by Macmillan.[Wolper, 1985] P. Wolper. The tableau method for temporal logic: an overview.Logique ae Analyse, 110{111:119{136, 1985.[Wolter and Zakharyaschev, 2000a] F. Wolter and M. Zakharyaschev. Spatialreasoning in RCC-8 with boolean region terms. In W. Horn, editor, Proceed-ings of the fourteenth European Conference on Arti�cial Intelligence, ECAI2000, Berlin, Germany, pages 244{248. IOS Press, 2000.[Wolter and Zakharyaschev, 2000b] F. Wolter and M. Zakharyaschev. Spatio-temporal representation and reasoning based on RCC-8. In Proceedings ofthe seventh Conference on Principles of Knowledge Representation and Rea-soning, KR2000, Breckenridge, USA, pages 3{14, Montreal, Canada, 2000.Morgan Kaufmann.[Wolter and Zakharyaschev, 2000c] F. Wolter and M. Zakharyaschev. Tempor-alizing description logics. In D. Gabby and M. de Rijke, editors, Frontiers ofCombining Systems II, pages 379{401. Research Studies Press LTD., England,2000.[Wolter and Zakharyaschev, 2001] F. Wolter and M. Zakharyaschev. Axioma-tizing the monodic fragment of �rst-order temporal logic. Annals of Pure andApplied Logic, 2001. (In print).[Worboys, 1995] M. Worboys. GIS: a Computing Perspective. Taylor&Francis,1995. 40

[Zanardo, 1996] A. Zanardo. Branching-time logic with quanti�cation overbranches: the point of view of modal logic. Journal of Symbolic Logic, 61:1{39, 1996.
41
Related Documents











