O N THE STANDARD H ∞ CONTROL OF TIME - DELAY SYSTEMS Qing-Chang Zhong [email protected] Dept. of Electrical Eng. & Electronics The University of Liverpool United Kingdom

Qing-Chang Zhongmypages.iit.edu/~qzhong2/NUS_HinfDelay_slides.pdf · Qing-Chang Zhong [email protected] ... the right CSR Chain-scattering rep. Q.-C. ZHONG: ON THE STANDARD H ... (P)
Apr 11, 2018
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
ON THE STANDARD H∞ CONTROL OF
TIME-DELAY SYSTEMS
Qing-Chang [email protected]
Dept. of Electrical Eng. & Electronics
The University of Liverpool
United Kingdom
Outline of the talk
Problem statement
Notations and preliminaries
Some simpler problems
Solving the problem
Solutions to the problems
Summary
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 2/53
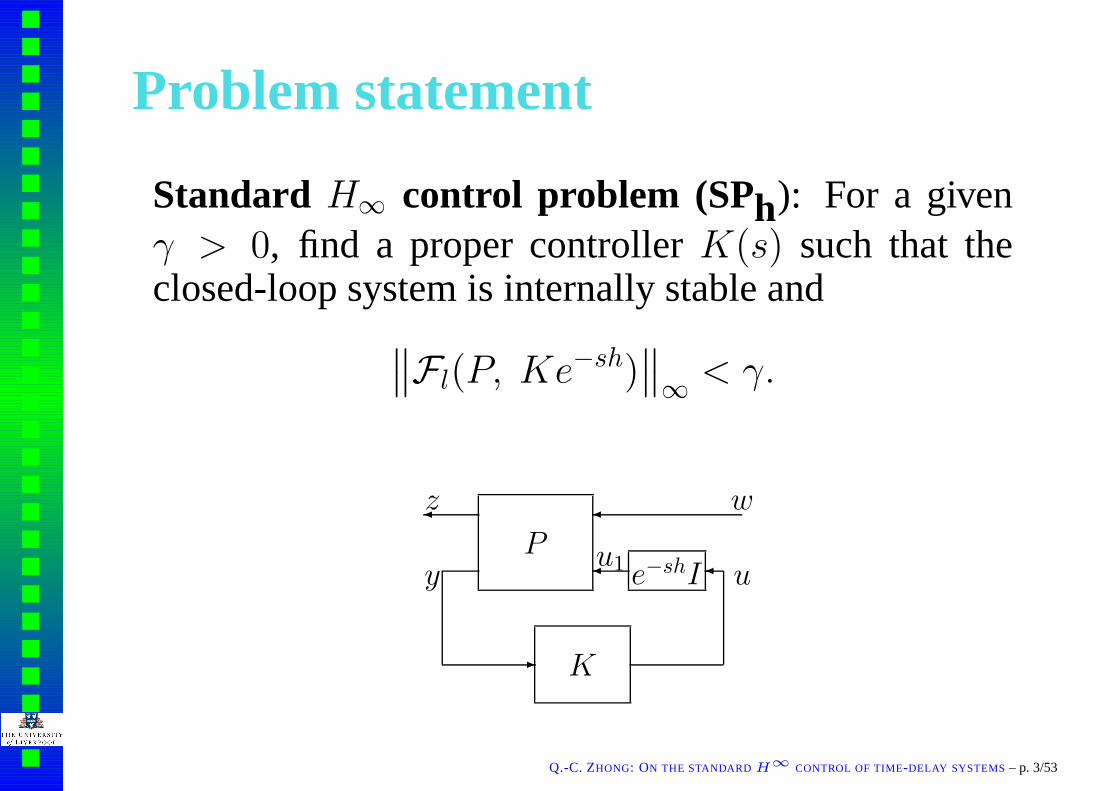
Problem statement
Standard H∞ control problem (SPh): For a givenγ > 0, find a proper controllerK(s) such that theclosed-loop system is internally stable and
∥
∥Fl(P, Ke−sh)∥
∥
∞< γ.
Pe−shI
K
�
� �
�
y
z
u
w
u1
-
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 3/53
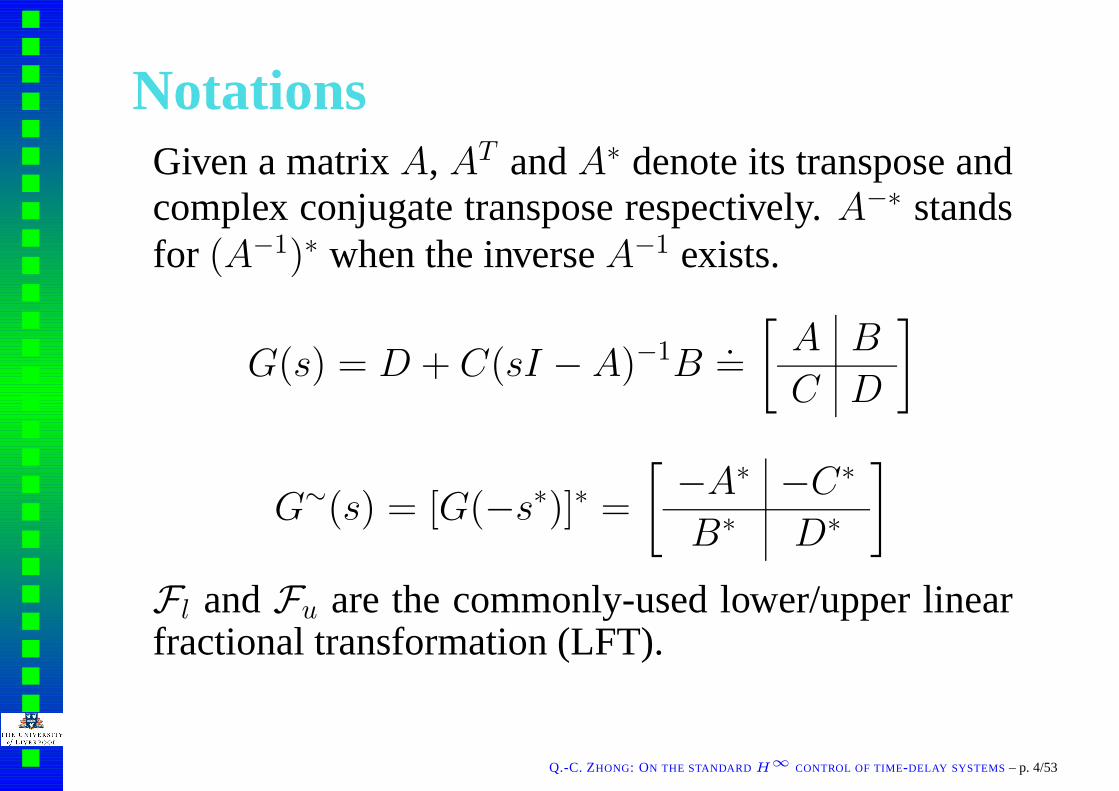
NotationsGiven a matrixA, AT andA∗ denote its transpose andcomplex conjugate transpose respectively.A−∗ standsfor (A−1)∗ when the inverseA−1 exists.
G(s) = D + C(sI − A)−1B.=
[
A B
C D
]
G∼(s) = [G(−s∗)]∗ =
[
−A∗ −C∗
B∗ D∗
]
Fl andFu are the commonly-used lower/upper linearfractional transformation (LFT).
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 4/53

Preliminaries
Two operators
Chain-scattering representation
Homographic transformation
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 5/53
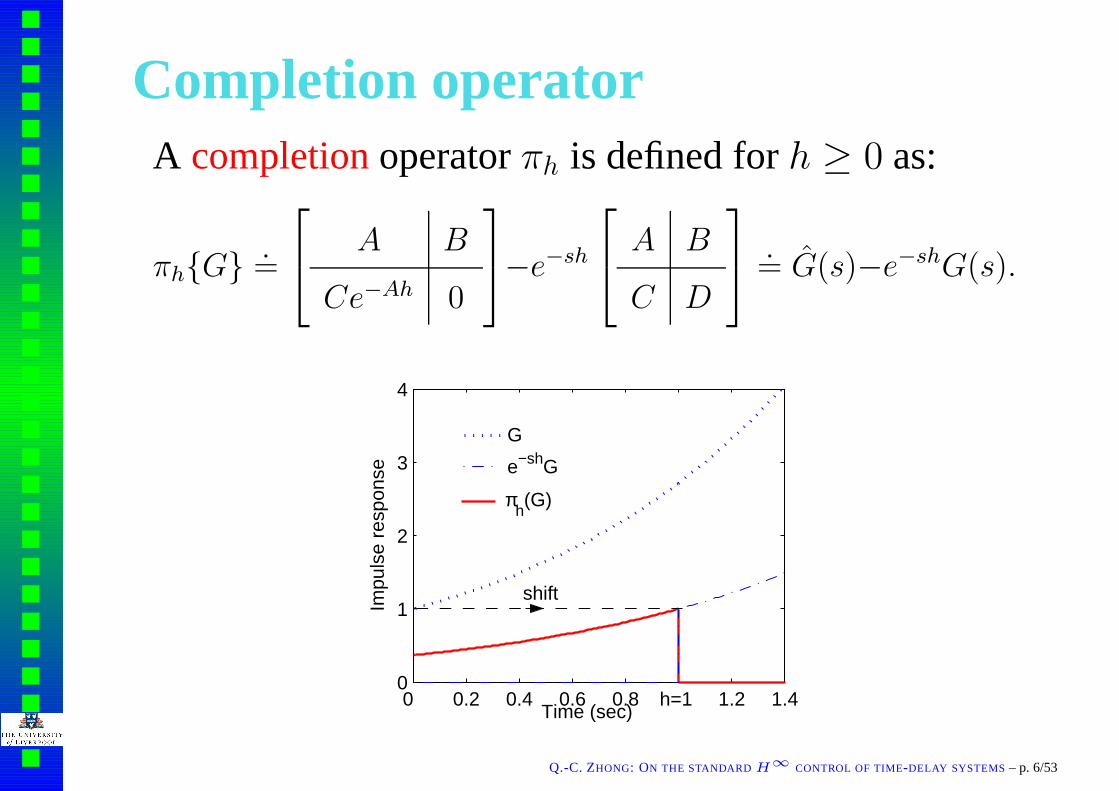
Completion operatorA completionoperatorπh is defined forh ≥ 0 as:
πh{G}.=
A B
Ce−Ah 0
−e−sh
A B
C D
.= G(s)−e−shG(s).
0 0.2 0.4 0.6 0.8 h=1 1.2 1.40
1
2
3
4
Time (sec)
Impu
lse
resp
onse
G
πh(G)
e−shG
shift
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 6/53
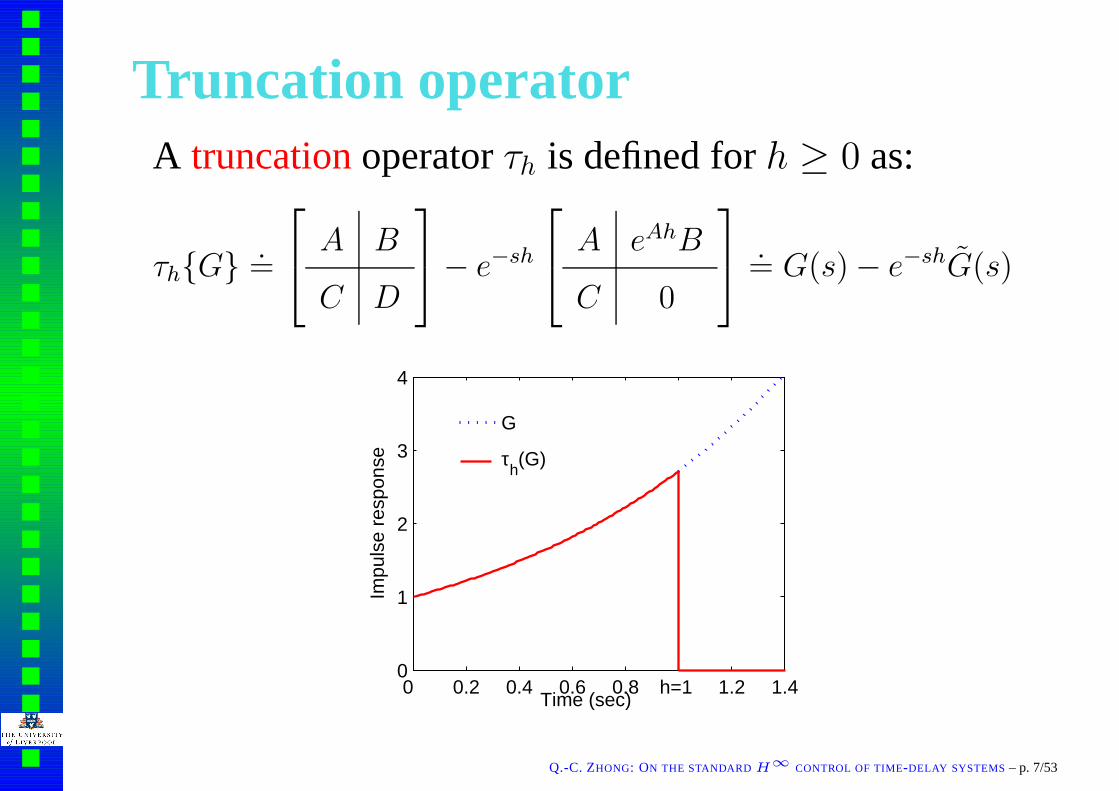
Truncation operatorA truncationoperatorτh is defined forh ≥ 0 as:
τh{G}.=
A B
C D
− e−sh
A eAhB
C 0
.= G(s) − e−shG(s)
0 0.2 0.4 0.6 0.8 h=1 1.2 1.40
1
2
3
4
Time (sec)
Impu
lse
resp
onse
G
τh(G)
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 7/53

Representations of systems
Input-output rep.
Cl(M)
(a) the left CSR
Cr(M)
(b) the right CSRChain-scattering rep.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 8/53
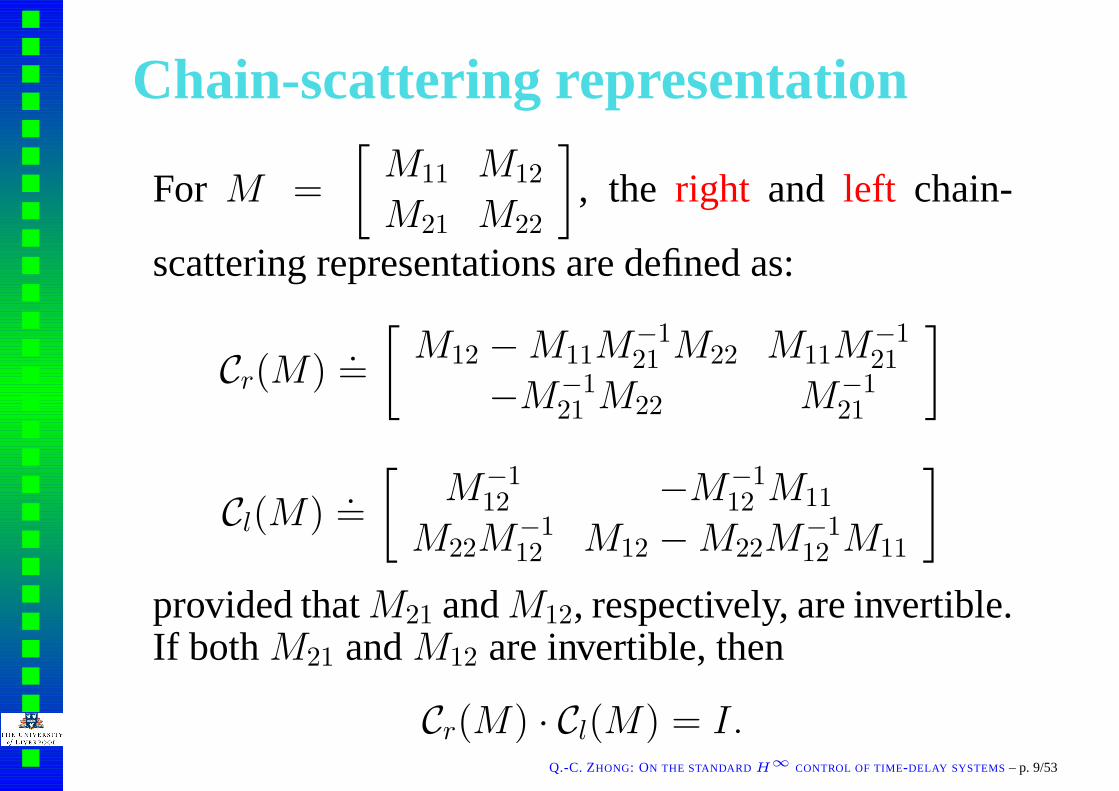
Chain-scattering representation
For M =
[
M11 M12
M21 M22
]
, the right and left chain-
scattering representations are defined as:
Cr(M).=
[
M12 − M11M−121 M22 M11M
−121
−M−121 M22 M−1
21
]
Cl(M).=
[
M−112 −M−1
12 M11
M22M−112 M12 − M22M
−112 M11
]
provided thatM21 andM12, respectively, are invertible.If both M21 andM12 are invertible, then
Cr(M) · Cl(M) = I.Q.-C. ZHONG: ON THE STANDARD H
∞ CONTROL OF TIME-DELAY SYSTEMS – p. 9/53
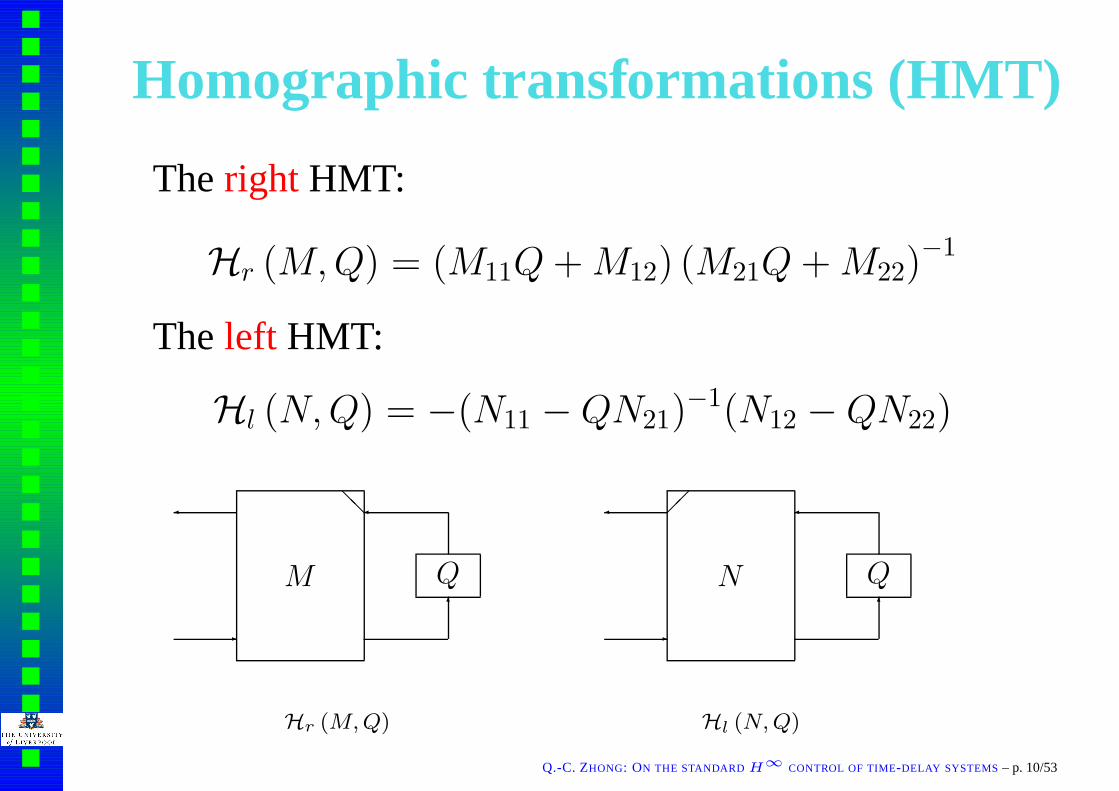
Homographic transformations (HMT)
Theright HMT:
Hr (M,Q) = (M11Q + M12) (M21Q + M22)−1
Theleft HMT:
Hl (N,Q) = −(N11 − QN21)−1(N12 − QN22)
M
@@
Q
-
� �
6
N
��
Q
-
� �
6
Hr (M, Q) Hl (N, Q)
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 10/53

Properties of the HMTLemma 1Hr satisfies the following properties:(i) Hr(Cr(M), S) = Fl(M,S);(ii) Hr(I, S) = S;(iii) Hr(M1,Hr(M2, S) = Hr(M1M2, S);(iv) If Hr(G,S) = R andG−1 exists, then
S = Hr(G−1, R).
Lemma 2 LetΛ be any unimodular matrix, then theH∞ control problem‖Hr(G, K0)‖∞ < γ is solvableiff ‖Hr(GΛ, K)‖∞ < γ is solvable. Furthermore,K0 = Hr(Λ, K) or K = Hr(Λ
−1, K0).
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 11/53

Problem statement
Notations and preliminaries
Some simpler problems
Solving the problem
Solutions to the problems
Summary
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 12/53

Some simpler problems
One-block problemOPh
Extended Nehari problemENPh
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 13/53

One-block problem
OPh: Given a not necessarily stableGβ with
Gβ(∞) =
[
0 I
I 0
]
, find a proper (but not necessar-
ily stable)K(s) such that∥
∥Fl(Gβ, Ke−sh)∥
∥
∞< γ,
for a givenγ > 0.Actually, the(1, 2) and(2, 1) blocks ofGβ have stableinverses as well here.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 14/53

Extended Nehari problem
ENPh: Given Gβ11, which is not necessarily stable,find a proper (but not necessarily stable)Qβ(s) suchthatGβ11 + e−shQβ is stable and
∥
∥Gβ11 + e−shQβ
∥
∥
∞< γ
for a givenγ > 0.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 15/53
Problem statement
Notations and preliminaries
Some simpler problems
Solving the problem
Solutions to the problems
Summary
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 16/53
Solving the standard problem
Via solvingsimpleproblemsusingsimpleideas andelementarytools.
Key steps:
Step 1: reducingSPh to SP0 + OPhStep 2: reducingOPh to ENPhStep 3: solvingENPhStep 4: recovering the controllers
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 17/53

The delay-free problem (I)
P (s) =
[
P11(s) P12(s)
P21(s) P22(s)
]
=
Ap Bp1 Bp2
Cp1 0 Dp12
Cp2 Dp21 0
Standard assumptions:(A1) (Ap, Bp2) is stabilisable and(Cp2, Ap) is de-tectable;(A2)
[
Ap − jωI Bp2
Cp1 Dp12
]
and[
Ap − jωI Bp1
Cp2 Dp21
]
have full column
rank and full row rank, respectively,∀ω ∈ R;(A3) D∗
p12Dp12 = I andDp21D∗p21 = I.
Assumption (A3) is made to simplify the exposition al-though, in fact, only the nonsingularity of the matricesD∗
p12Dp12 andDp21D∗p21 is required.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 18/53

The delay-free problem (II)
H0 =
[
Ap γ−2Bp1B∗p1
−C∗p1Cp1 −A∗
p
]
−
[
Bp2
−C∗p1Dp12
]
[
D∗p12Cp1 B∗
p2
]
,
J0 =
[
A∗p γ−2C∗
p1Cp1
−Bp1B∗p1 −Ap
]
−
[
C∗p2
−Bp1D∗p21
]
[
Dp21B∗p1 Cp2
]
.
Solvability conditions:(i) H0 ∈ dom(Ric) andX = Ric(H0) ≥ 0;(ii) J0 ∈ dom(Ric) andY = Ric(J0) ≥ 0;(iii) ρ(XY ) < γ2.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 19/53

The delay-free problem (III)Controller parameterisation:
K0 = Hr(Gα, Qα)
where
Gα =
Aα − B1C2 B2 B1
C1 I 0
−C2 0 I
andQα(s) ∈ H∞ is a free parameter satisfying
‖Qα(s)‖∞ < γ.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 20/53
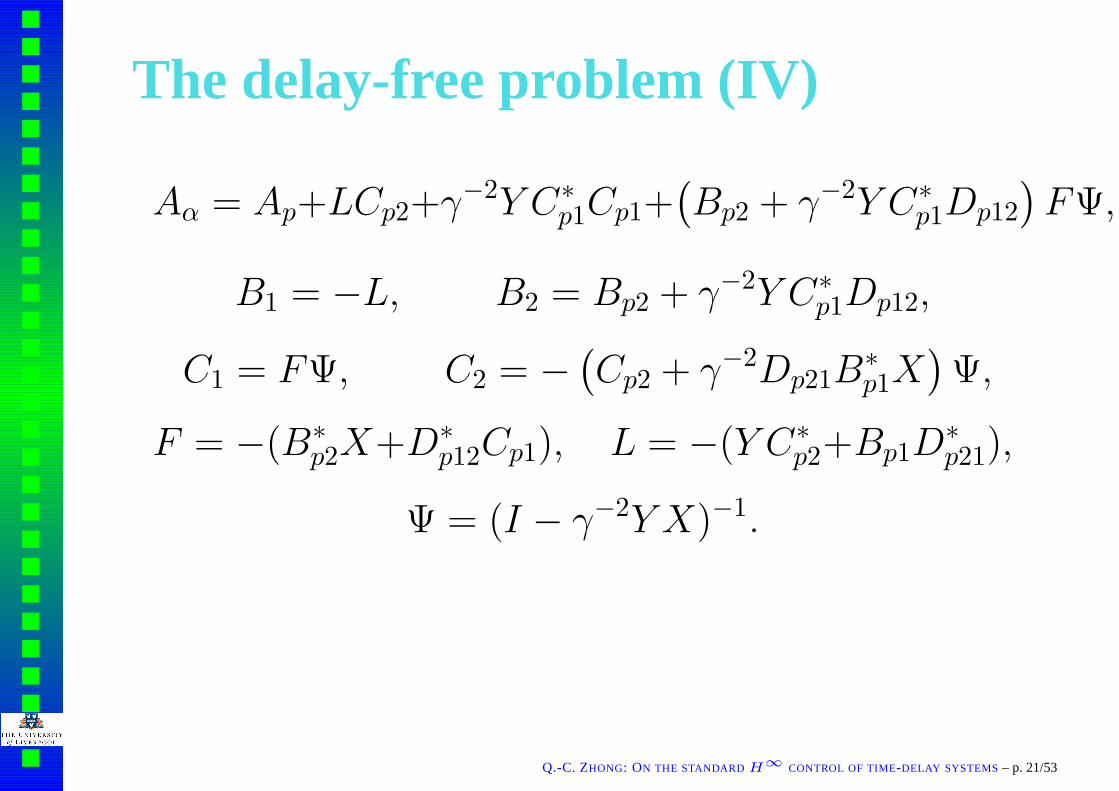
The delay-free problem (IV)
Aα = Ap+LCp2+γ−2Y C∗p1Cp1+
(
Bp2 + γ−2Y C∗p1Dp12
)
FΨ,
B1 = −L, B2 = Bp2 + γ−2Y C∗p1Dp12,
C1 = FΨ, C2 = −(
Cp2 + γ−2Dp21B∗p1X
)
Ψ,
F = −(B∗p2X+D∗
p12Cp1), L = −(Y C∗p2+Bp1D
∗p21),
Ψ = (I − γ−2Y X)−1.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 21/53
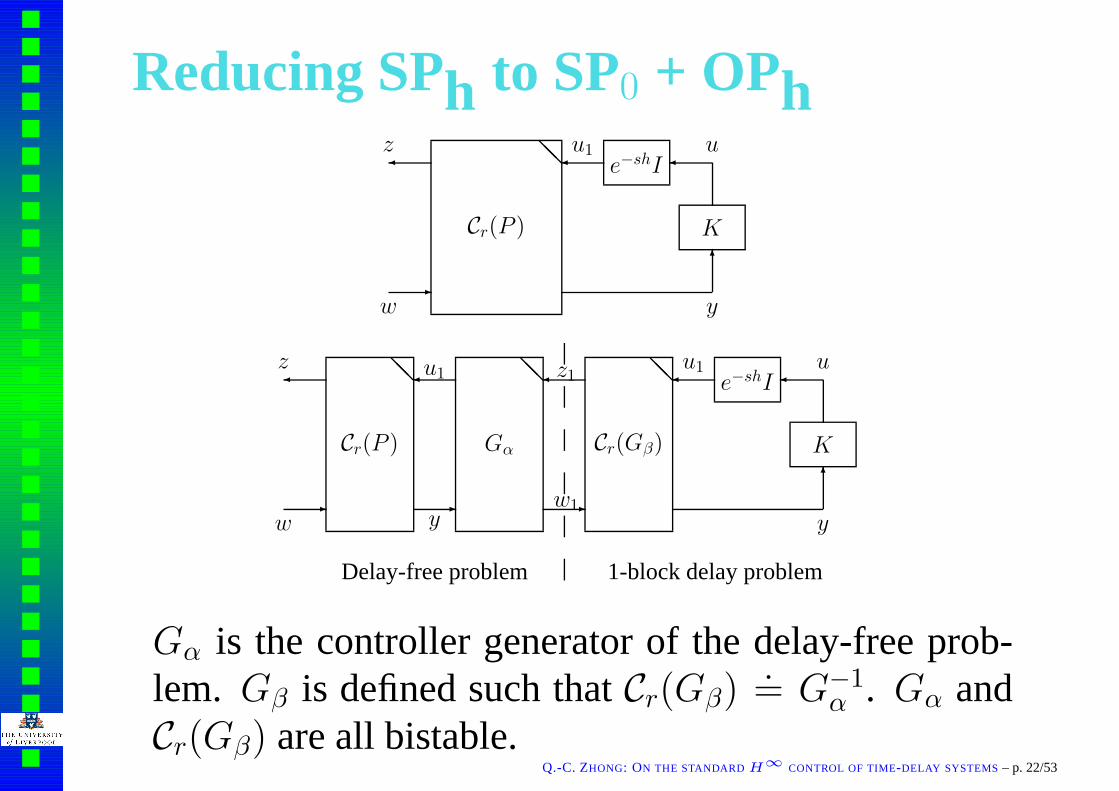
Reducing SPh to SP0 + OPh
Cr(P )
@@ e−shI
K
-
� � �
w
z u
y
u1
6
Cr(P )
@@
Gα
@@
Cr(Gβ)
@@ e−shI
K
Delay-free problem 1-block delay problem
-
�
-
�
-
� � �
w
z u
y
u1
6
w1
z1
y
u1
Gα is the controller generator of the delay-free prob-lem. Gβ is defined such thatCr(Gβ)
.= G−1
α . Gα andCr(Gβ) are all bistable.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 22/53
Gβ
Gβ =
[
Gβ11 Gβ12
Gβ21 Gβ22
]
=
A B1 B2
−C1 0 I
−C2 I 0
with A.= Aα − B1C2 − B2C1. AlthoughAα and/or
A may be unstable butA + B2C1 = Aα − B1C2 andA + B1C2 = Aα − B2C1 are always stable sinceGα
andCr(Gβ) are all bistable.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 23/53

Reducing OPh to ENPh (I)
Qα(s) = Hr(Cr(Gβ), e−shK) = Fl(Gβ, e
−shK)
= Gβ11 + Gβ12Ke−sh(I − Gβ22Ke−sh)−1Gβ21
h
Gβ11
Gβ12
Gβ22
Gβ21h
∆2
e−shI
h
Kh(s)
�
-
+
-
K(s)�
- -
��
6
6
6
?
?
?
?
z1
w1
u1
y
u
Introducing a Smith predictor∆2(s) = −πh{Gβ22}
.= −Gβ22 + e−shGβ22
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 24/53
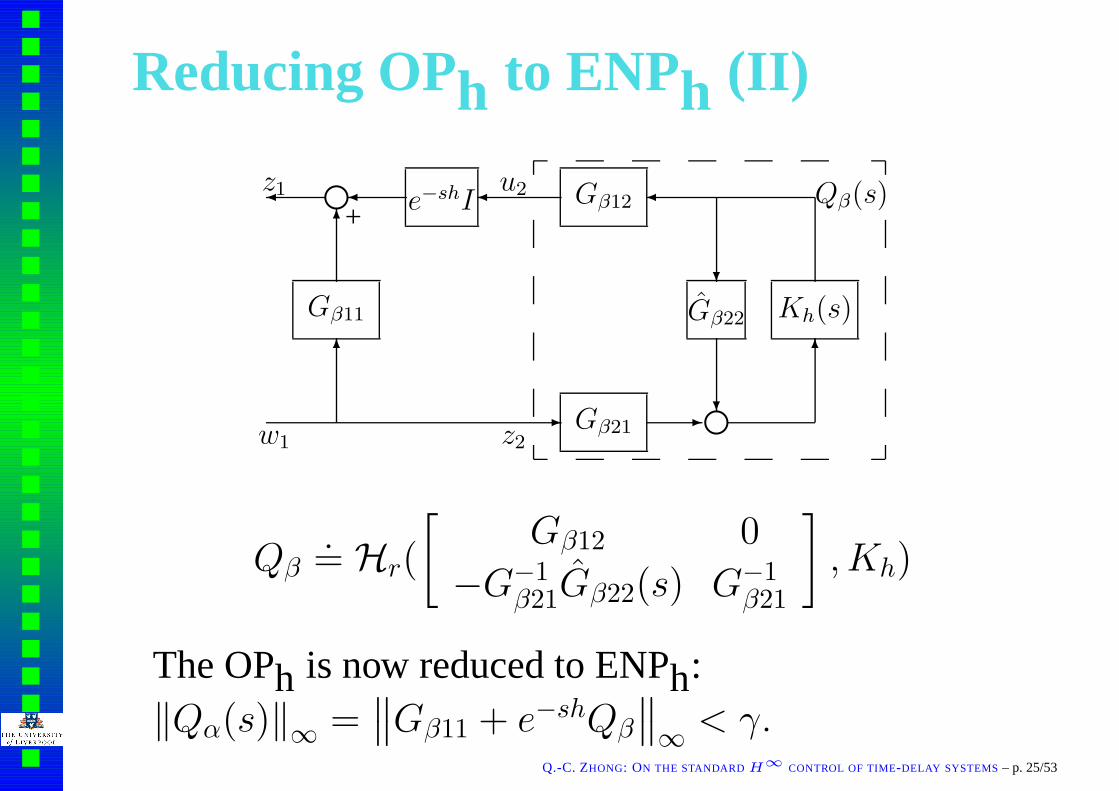
Reducing OPh to ENPh (II)
h
Gβ11
Gβ12e−shI
Gβ21
Gβ22
h
Kh(s)
�
-
+Qβ(s)�
-
��
6
6
6
?
?
z1
w1
u2
z2
Qβ.= Hr(
[
Gβ12 0
−G−1β21Gβ22(s) G−1
β21
]
,Kh)
The OPh is now reduced to ENPh:‖Qα(s)‖∞ =
∥
∥Gβ11 + e−shQβ
∥
∥
∞< γ.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 25/53
An intermediate result
TheSPh is solvable iff its delay-free counterpartSP0
and the corresponding extended Nehari problem witha delayENPh are all solvable.
SPh ⇐⇒ SP0 + ENPh
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 26/53

ENPhin an different formDefine a stable FIR block
Q∆ = Gβ11 − e−shGβ11 = τh{Gβ11},
then theENPh is converted to a conventional Nehariproblem
∥
∥eshQ∆ + Q0
∥
∥
∞< γ,
whereQ0 = Gβ11 + Qβ is stable.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 27/53

Solvability condition of ENPhIt is well-known that this problem is solvable iff
γ > γh.=
∥
∥ΓeshQ∆
∥
∥
whereΓ denotes the Hankel operator.
In fact,γh is the L2[0, h]-induced norm ofGβ11:
γh = ‖Gβ11‖L2[0,h] = sup‖u‖[0,h] 6=0
‖y‖[0,h]
‖u‖[0,h]
.
A simple representation ofγh:
γh = max{γ : det Σ22 = 0}.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 28/53
Σ-matrix
Σ =
[
Σ11 Σ12
Σ21 Σ22
]
.= eHh,
where
H =
[
A γ−2B1B∗1
−C∗1C1 −A∗
]
.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 29/53

What is the real problem left?
To find the parameterisation ofQβ under the conditionγ > γh.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 30/53

Equivalent conditions for γ > γh
There existsQ0 ∈ H∞ such that∥
∥Gβ11 + e−shQβ
∥
∥
∞< γ, where
Qβ = Q0 − Gβ11;
Σ22 (which is a function ofγ) is nonsingular not only forγ but also for any number
larger thanγ;
There exists a unique functionX(t) satisfying the differential Riccati equation
X(t) =[
I −X(t)]
H
X(t)
I
,
with X(0) = 0 for t ∈ [0, h]. In particular,X(h) = Σ12Σ−1
22;
There exists a unique solution pairU(t), V (t) satisfying the differential Riccati equation
U(t)
V (t)
= H
U(t)
V (t)
with U(0) = 0, V (0) = I for t ∈ [0, h]. In particular,U(h) = Σ12, V (h) = Σ22.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 31/53

Solving the ENPhENPh can be written in the chain-scattering represen-tation:
‖Hr(G(s), Qβ(s))‖∞ < γ.
with
G(s).=
[
e−shI Gβ11
0 I
]
.
A H∞ control problem is closely related to the matrix
G∼(s)JG(s) with J =
[
I 0
0 −γ2I
]
. If G(s) is com-
pleted to beJ-lossless, then theH∞ problem is solved.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 32/53

Rationalise the problem
h
Gβ11 ∆1(s)
e−shI
W−1(s)
h
Q(s)
Qβ(s)@@�
--
z1
w1
u2
z2
�
-
��
6
6
6
?
?
∆1(s) = −πh{Fu(
[
Gβ11 I
I 0
]
, γ−2G∼β11)}.
The following matrix is rationalised:
Θ.=
[
I ∆1(s)∼
0 I
]
G∼JG
[
I 0
∆1(s) I
]
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 33/53
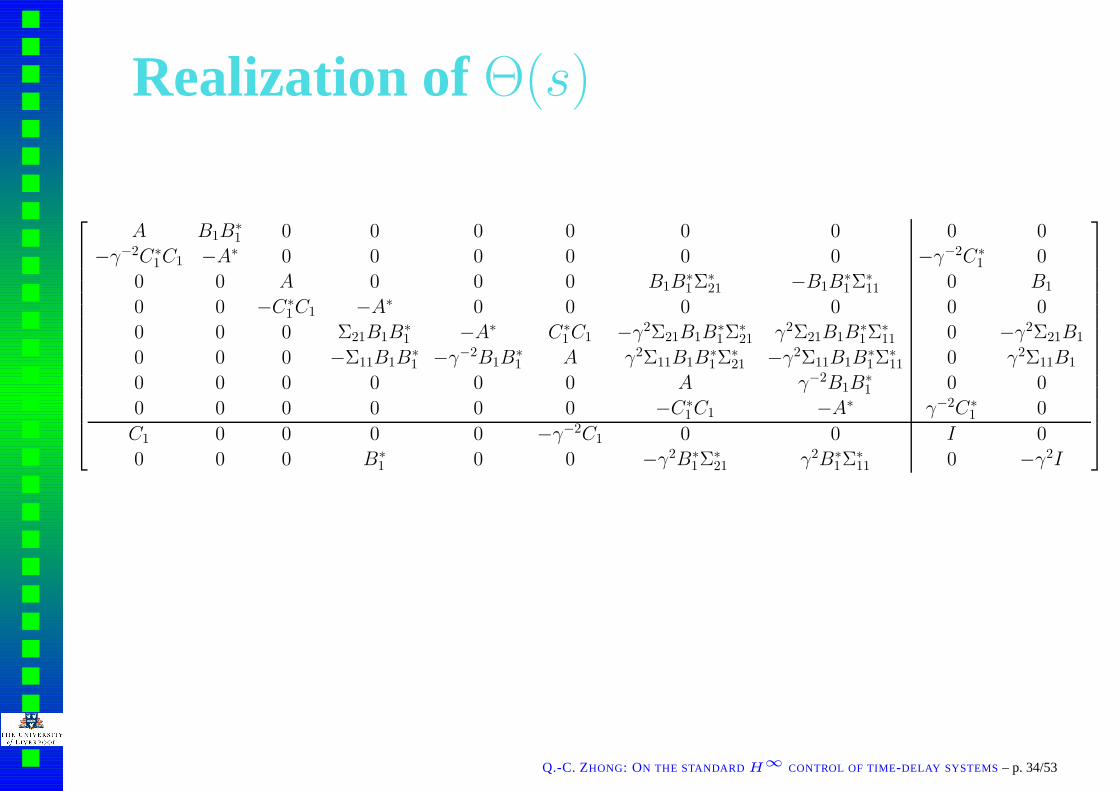
Realization ofΘ(s)
A B1B∗1 0 0 0 0 0 0 0 0
−γ−2C∗1C1 −A∗ 0 0 0 0 0 0 −γ−2C∗
1 0
0 0 A 0 0 0 B1B∗1Σ
∗21 −B1B
∗1Σ
∗11 0 B1
0 0 −C∗1C1 −A∗ 0 0 0 0 0 0
0 0 0 Σ21B1B∗1 −A∗ C∗
1C1 −γ2Σ21B1B∗1Σ
∗21 γ2Σ21B1B
∗1Σ
∗11 0 −γ2Σ21B1
0 0 0 −Σ11B1B∗1 −γ−2B1B
∗1 A γ2Σ11B1B
∗1Σ
∗21 −γ2Σ11B1B
∗1Σ
∗11 0 γ2Σ11B1
0 0 0 0 0 0 A γ−2B1B∗1 0 0
0 0 0 0 0 0 −C∗1C1 −A∗ γ−2C∗
1 0
C1 0 0 0 0 −γ−2C1 0 0 I 0
0 0 0 B∗1 0 0 −γ2B∗
1Σ∗21 γ2B∗
1Σ∗11 0 −γ2I
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 34/53
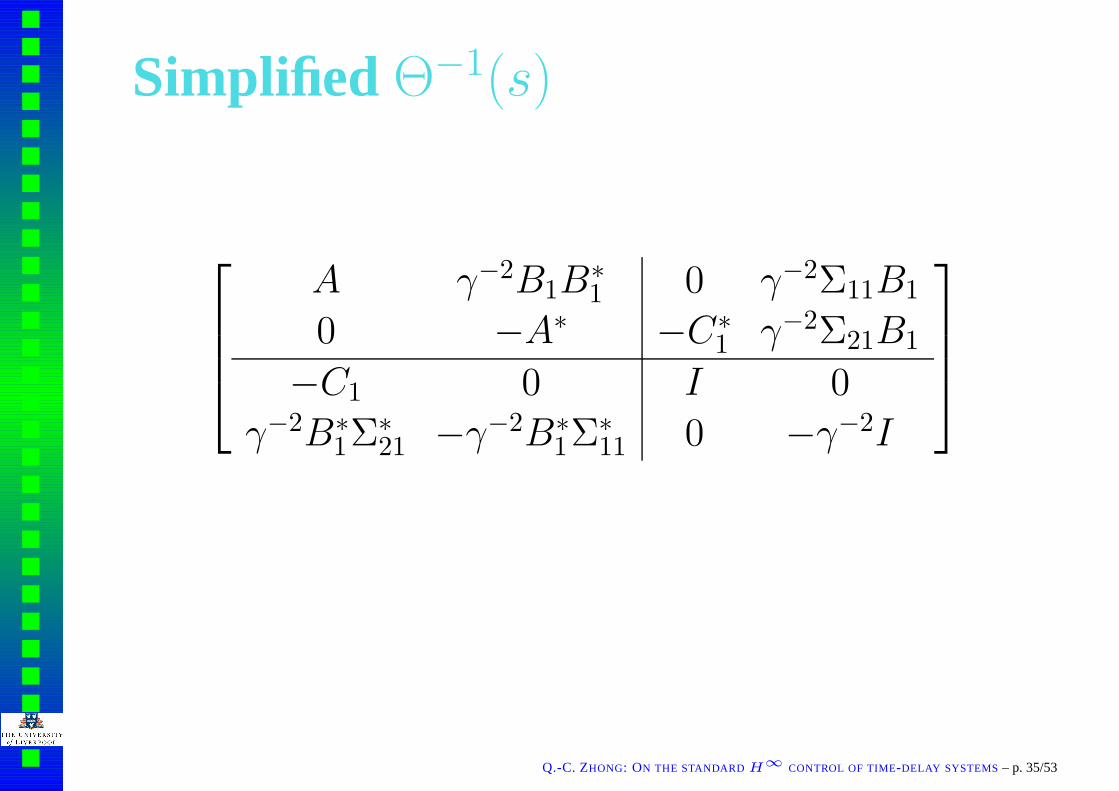
Simplified Θ−1(s)
A γ−2B1B∗1 0 γ−2Σ11B1
0 −A∗ −C∗1 γ−2Σ21B1
−C1 0 I 0
γ−2B∗1Σ
∗21 −γ−2B∗
1Σ∗11 0 −γ−2I
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 35/53

Factorisation of Θ−1
Amazingly,γ−2B1B
∗1 + Σ12Σ
−122 A∗ + AΣ12Σ
−122 ≡
−Σ12Σ−122 C∗
1C1Σ−∗22 Σ∗
12 + γ−2Σ−∗22 B1B
∗1Σ
−122 .
Hence,
Θ−1 = W−1(s) · J−1 · W−∼(s),
where
W−1(s) =
A Σ12Σ−122 C∗
1 −Σ−∗22 B1
−C1 I 0
γ−2B∗1Σ
∗21 0 I
.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 36/53
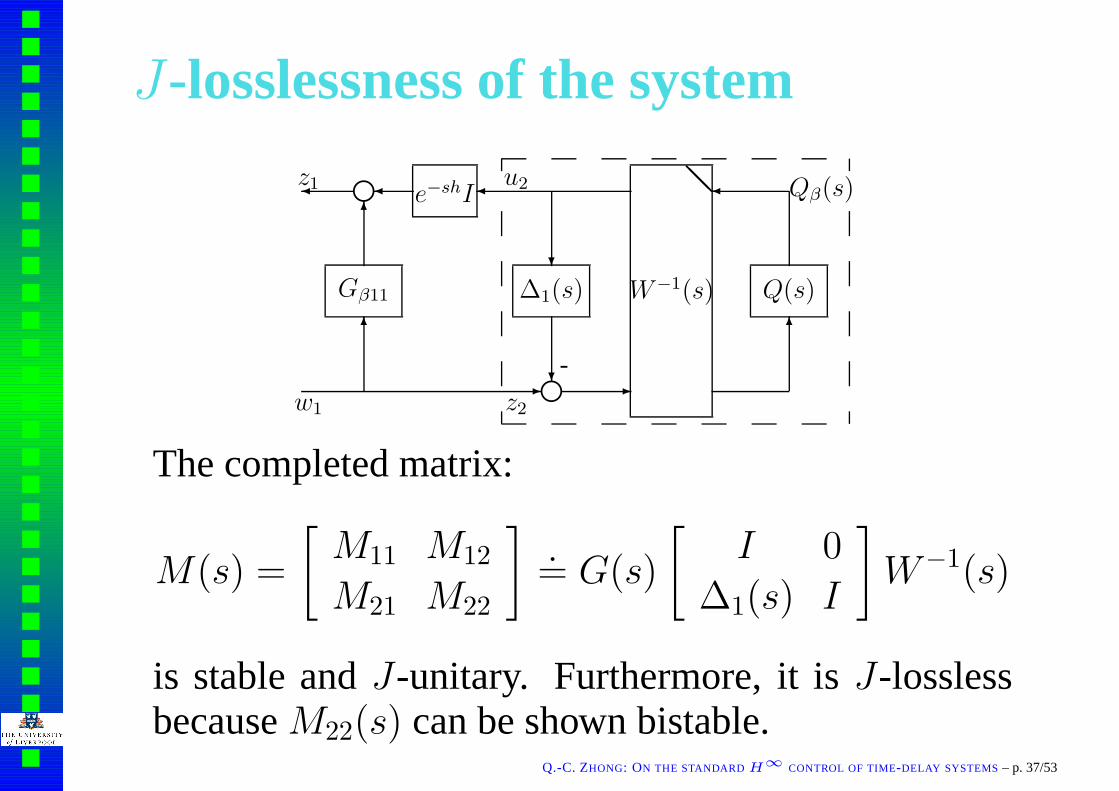
J-losslessness of the system
h
Gβ11 ∆1(s)
e−shI
W−1(s)
h
Q(s)
Qβ(s)@@�
--
z1
w1
u2
z2
�
-
��
6
6
6
?
?
The completed matrix:
M(s) =
[
M11 M12
M21 M22
]
.= G(s)
[
I 0
∆1(s) I
]
W−1(s)
is stable andJ-unitary. Furthermore, it isJ-losslessbecauseM22(s) can be shown bistable.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 37/53
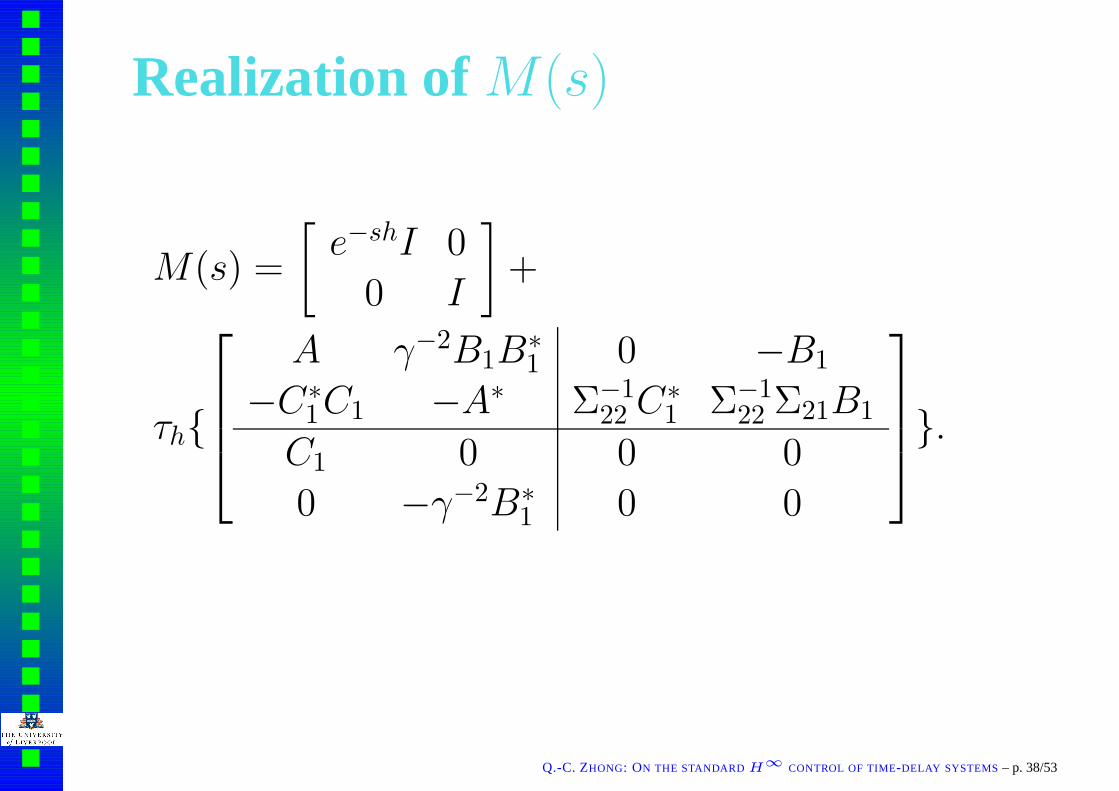
Realization ofM(s)
M(s) =
[
e−shI 0
0 I
]
+
τh{
A γ−2B1B∗1 0 −B1
−C∗1C1 −A∗ Σ−1
22 C∗1 Σ−1
22 Σ21B1
C1 0 0 0
0 −γ−2B∗1 0 0
}.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 38/53

Near the end (sufficiency)We have now obtained that
Gβ11 + e−shQβ = Hr(M(s), Q(s))
is stable and∥
∥Gβ11 + e−shQβ
∥
∥
∞< γ for
Qβ(s) = Hr(
[
I 0
∆1(s) I
]
W−1(s), Q(s))
with any stableQ(s) having‖Q(s)‖∞ < γ.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 39/53
NecessityBy construction,
∥
∥Gβ11 + e−shQβ
∥
∥
L∞
< γ iff
‖Q(s)‖L∞
< γ for
Q(s) = Hr(W (s)
[
I 0
−∆1(s) I
]
, Qβ(s)).
Q(s) given above is proper iffQβ(s) is proper.
The set of proper operators inL∞ is in factH∞. So ifQβ(s) solvesENPh, thennecessarily‖Q(s)‖∞ < γ.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 40/53
Solution to ENPhSolvability⇐⇒ γ > γh
Parameterisation:
Qβ(s) = Hr(
I 0
∆1(s) I
W−1(s), Q(s)),
where
∆1(s) = −πh{
A γ−2B1B∗
10
−C∗
1C1 −A∗ C∗
1
0 γ−2B∗
10
},
W−1(s) =
A Σ12Σ−1
22C∗
1−Σ−∗
22B1
−C1 I 0
γ−2B∗
1Σ∗
210 I
,
and‖Q(s)‖∞
< γ is a free parameter.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 41/53
Moving back to OPh and SPh
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 42/53

Recovering the controller
hh
Gβ22∆2(s) ∆1(s)
G−1β12
G−1β21
W−1(s)
h
Q(s)
@@
- - - --- -
u
y
�
-
��
6
?
?
?
?
?
?
K = Hr(
[
I 0
∆2 I
]
[
G−1β12 0
Gβ22G−1β12 Gβ21
]
[
I 0
∆1 I
]
W−1, Q)
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 43/53
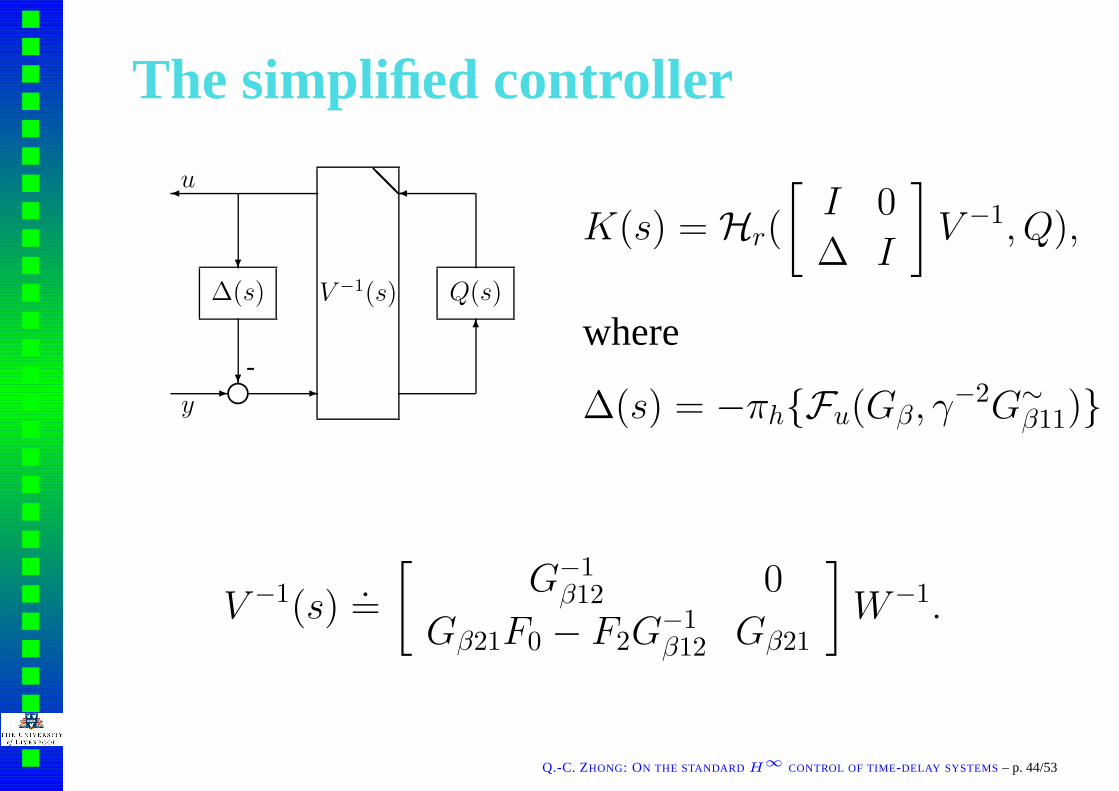
The simplified controller
∆(s) V −1(s)
h
Q(s)
@@
--
u
y-
��
6
?
?
K(s) = Hr(
[
I 0
∆ I
]
V −1, Q),
where
∆(s) = −πh{Fu(Gβ, γ−2G∼
β11)}
V −1(s).=
[
G−1β12 0
Gβ21F0 − F2G−1β12 Gβ21
]
W−1.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 44/53
Problem statement
Notations and preliminaries
Some simpler problems
Solving the problem
Solutions to the problems
Summary
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 45/53

Solution to OPhSolvability⇐⇒ γ > γh
Parameterisation:
K(s) = Hr(
[
I 0
∆(s) I
]
V −1(s), Q(s))
where
∆(s) = −πh{Fu(Gβ, γ−2G∼
β11)}
V −1(s) =
A + B2C1 B2 − Σ12Σ−122 C∗
1 Σ−∗22 B1
C1 I 0
−γ−2B∗1Σ
∗21 − C2Σ
∗22 0 I
,
and‖Q(s)‖∞ < γ is a free parameter.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 46/53
Solution to SPhSolvability⇐⇒ :
H0 ∈ dom(Ric) andX = Ric(H0) ≥ 0;
J0 ∈ dom(Ric) andY = Ric(J0) ≥ 0;
ρ(XY ) < γ2;
γ > γh.
Parameterisation:
K(s) = Hr(
[
I 0
∆(s) I
]
V −1(s), Q(s))
where∆(s) andV −1(s) are given in in the last slideand‖Q(s)‖∞ < γ is a free parameter.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 47/53
Some commentsV (s) is bistable:Σ−∗
22 (A + B1C2)Σ∗22 ∼ A + B1C2
The lower-right block ofCr(P )
[
I 0
∆ I
]
V −1 is
bistable.
The solvability conditions ofSPh are those ofSP0 plusγ > γh.
ForSP0, Σ ≡ I. SoΣ22 ≡ I is always nonsingularfor anyγ > 0. The last condition disappears andV −1(s) becomesGα(s). Hence, the last conditionis the additional cost of the delay.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 48/53
Hints for multi-delay problemsTwo steps to obtain the FIR block: in the first step,a common modified Smith predictor∆2(s) is ob-tained; in the second step another FIR block∆1(s)is obtained;
It can also be solved in a clear and simple way: re-ducing the original problem to a delay-free prob-lem and a one-block problem with delay(s). Oncethe one-block problem with delay(s) is solved, theoriginal problem is solved.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 49/53

Interpretation of H∞ fixed-lagsmoothing problemGivenG1(s), G2(s), γ > 0 andh ≥ 0, find a properK(s) such that
∥
∥e−shG1(s) − K(s)G2(s)∥
∥
∞< γ.
h
e−shG1 ∆s
G2
h
Ks
�
-
- +K(s)� �
6
6
6 6
6
Nothing but afeedforwardFIR block∆s is needed.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 50/53

Summary
Standard problem with a single delay (SPh)
One-block problem (OPh)
Extended Nehari problem (ENPh)
Recovering the controller
SPh = SP0 + OPh
SPh ⇐⇒ SP0 + ENPhQ.-C. ZHONG: ON THE STANDARD H
∞ CONTROL OF TIME-DELAY SYSTEMS – p. 51/53
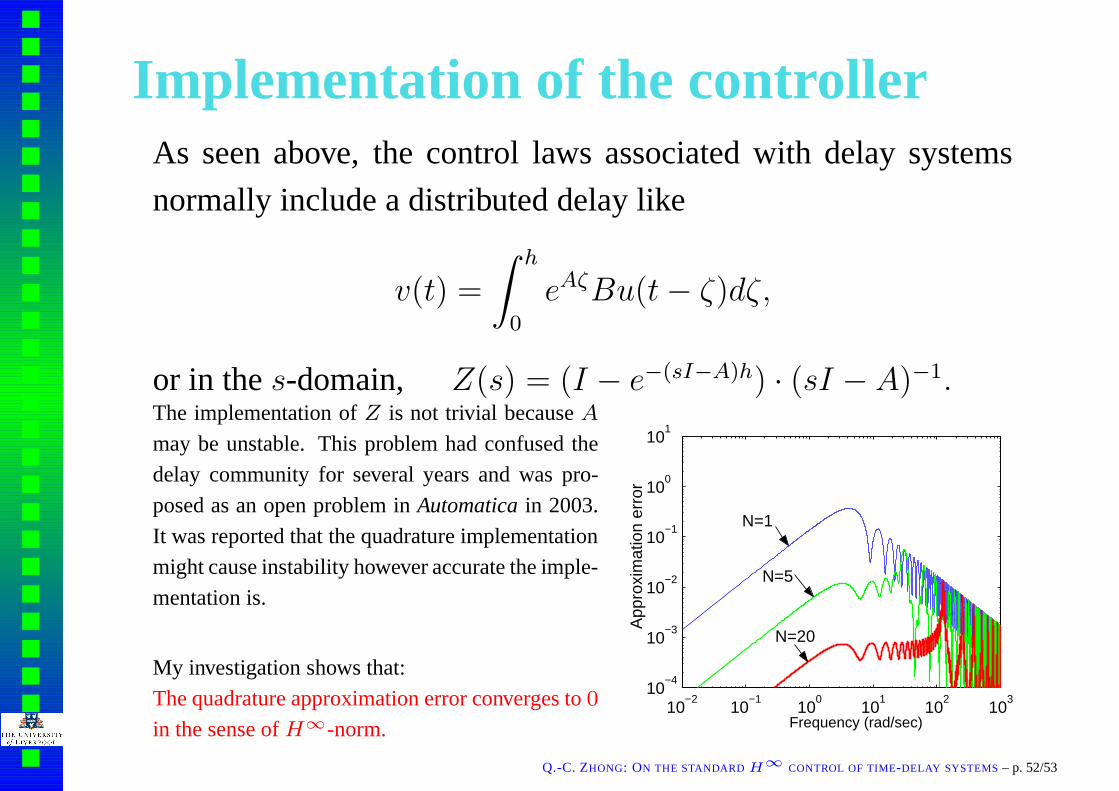
Implementation of the controllerAs seen above, the control laws associated with delay systems
normally include a distributed delay like
v(t) =
∫ h
0
eAζBu(t − ζ)dζ,
or in thes-domain, Z(s) = (I − e−(sI−A)h) · (sI − A)−1.The implementation ofZ is not trivial becauseA
may be unstable. This problem had confused the
delay community for several years and was pro-
posed as an open problem inAutomatica in 2003.
It was reported that the quadrature implementation
might cause instability however accurate the imple-
mentation is.
My investigation shows that:
The quadrature approximation error converges to0
in the sense ofH∞-norm.10
−210
−110
010
110
210
310
−4
10−3
10−2
10−1
100
101
Frequency (rad/sec)
N=1
N=5
N=20 A
ppro
xim
atio
n er
ror
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 52/53

Rational implementation
1x2xΠ
Nx 1−Nx
B1−Φbu
u
rv
…
ΦΦ+−=Π −1)( AsI
Π Π
…
Π = (sI − A + Φ)−1Φ,
Φ = (∫ h
N
0 e−Aζdζ)−1.
Q.-C. ZHONG: ON THE STANDARD H∞ CONTROL OF TIME-DELAY SYSTEMS – p. 53/53
AB 3
1
› springer.com
isbn 1-84628-264-0
Qing-Chang Zhong
Robust Control of Time-delay Systems
ZhongRobust Control of Tim
e-delay Systems
Systems with delays appear frequently in engineering; typical examples include communication networks, chemical processes and tele-operation systems. The presence of delays makes system analysis and control design much more complicated. During the last decade, we have witnessed significant develop-ments in robust control of time-delay systems. This volume presents a system-atic and comprehensive treatment for robust (H∞) control of such systems in the frequency domain. The emphasis is on systems with a single input or out-put delay, although the delay-free part of the plant can be multi-input-multi-output, in which case the delays in different channels should be the same.
This synthesis of the author’s recent work covers the whole range of robust control of time-delay systems: from controller parameterization and design to controller implementation; from the Nehari and one-block problems to the four-block problem; from theoretical developments to practical issues. The major tools used in this book are similarity transformation, the chain-scattering approach and J-spectral factorization. The idea is, in the words of Albert Einstein, to “make everything as simple as possible, but not simpler”. A website associated with the book, is a source of MATLAB® and Simulink® material which will assist in the simulation of the material in the text.
Robust Control of Time-delay Systems is self-contained and will interest control theorists, researchers and mathematicians working with time-delay systems and engineers looking to design commercial controllers or to use them in plants, biosystems or communication systems with time delays. Its methodical approach will also be of value to graduates studying either general (robust) control theory or its particular applications in time-delay systems.
Related Documents











