• Project Description: – Utility-driven, public-private collaborative project to develop system-level security requirements for smart grid technology • Needs Addressed: – Utilities: specification in RFP – Vendors: reference in build process – Government: assurance of infrastructure security – Commissions: protection of public interests • Approach: – Architectural team produce material – Usability Analysis team assess effectiveness – NIST, UtiliSec review, approve • Deliverables: – Strategy & Guiding Principles white paper – Security Profile Blueprint – 6 Security Profiles – Usability Analysis ASAP-SG: Summary Schedule: June 2009 – June 2012 Budget: $3M/year ($1.5M Utilities + $1.5M DOE) Performers: Utilities, EnerNex, Inguardians, SEI, ORNL Partners: DOE, EPRI Release Path: NIST, UCAIug Contacts: Bobby Brown [email protected] Darren Highfill [email protected]

Project Description: – Utility-driven, public-private collaborative project to develop system-level security requirements for smart grid technology Needs.
Dec 24, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

• Project Description:
– Utility-driven, public-private collaborative project to develop system-level security requirements for smart grid technology
• Needs Addressed:
– Utilities: specification in RFP
– Vendors: reference in build process
– Government: assurance of infrastructure security
– Commissions: protection of public interests
• Approach:– Architectural team produce material
– Usability Analysis team assess effectiveness
– NIST, UtiliSec review, approve
• Deliverables:– Strategy & Guiding Principles white paper
– Security Profile Blueprint
– 6 Security Profiles
– Usability Analysis
ASAP-SG: Summary
Schedule: June 2009 – June 2012Budget: $3M/year
($1.5M Utilities + $1.5M DOE)
Performers: Utilities, EnerNex, Inguardians, SEI, ORNL
Partners: DOE, EPRIRelease Path: NIST, UCAIugContacts:
Bobby Brown [email protected] Highfill [email protected]

ASAP-SG Security Profiles
• Advanced Security Acceleration Project for the Smart Grid
– Prescriptive, actionable guidance
– How to build-in and implement security
• Tailored to a set of specific smart grid functions, such as
– Advanced Metering Infrastructure
– Third Party Data Access
– Distribution Management
– WAMPAC (Synchrophasors)
– Substation Automation
– Home Area Networks
PROPOSED
COMPLETE
COMPLETE
COMPLETE
COMPLETE
IN PROGRESS
Methods from reliability engineering and their application to cyber-security
James NutaroOak Ridge National Laboratory

Outline
• Failure identification– State transition systems– Applications
• Failure likelihood– Markov models– Applications
• Consequence assessment– Dynamic models– Applications

Failure identification
• We will use state transition models to– Enumerate failures of a systems– Prioritize failures– Determine failure modes to high priority failures– Device security controls to negate failure modes

What is a state transition system?
• A state transition systems has– A set of state variables– A range for each state variable
• A state is an assignment of values to the state variables
• A transition is a change of state• An trajectory of the system is a sequence of
states (or, equivalently, a sequence of transitions)

An example of a simple data processing systems, part 1
• Two state variables:– data– activity
• The data state variable– Describes if data is presently available for the system to
process– Range is none and present
• The activity state variable– Describes what the system is doing– Range is idle and active

An example of a simple data processing systems, part 2
• This system has four states
• It has sixteen possible transitions– Acceptable transitions
are shown in the figure– The system is designed
for executions that involve only these transitions
data=noneactivity=idle
data=presentactivity=idle
data=presentactivity=active
data=noneactivity=active

An example of a simple data processing systems, part 3
• Unacceptable transitions are shown in this figure
• Any execution that includes one of these transitions is a failure – something went wrong
data=noneactivity=idle
data=presentactivity=idle
data=presentactivity=active
data=noneactivity=active

Enumerating failure transitions
• The simplest failure is a trajectory that consists of a single unacceptable transition– Call this simplest failure a failure transition
• We can enumerate these transitions– Given N states, there are N*N possible transitions– M of these occur by design– The remaining N*N – M are failure transitions

An example of a simple data processing systems, part 4
data=noneactivity=idle
data=presentactivity=idle
data=presentactivity=active
data=noneactivity=active
Failure transition
Acceptable transition
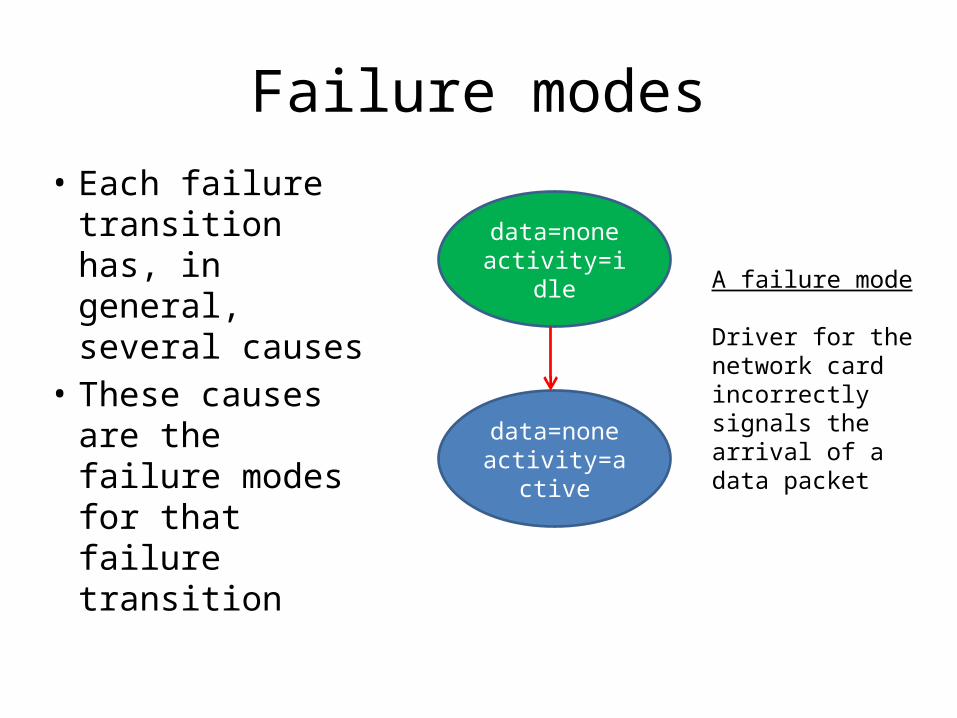
Failure modes
• Each failure transition has, in general, several causes
• These causes are the failure modes for that failure transition
data=noneactivity=idle
data=noneactivity=active
A failure mode
Driver for the network card incorrectly signals the arrival of a data packet

Security controls
• Security controls are designed to mitigate, negate, or otherwise render implausible one or more failure modes
data=noneactivity=idle
data=noneactivity=active
A failure mode
Driver for the network card incorrectly signals the arrival of a data packet
A security control
Require all drivers to be signed and then verified upon loading by the OS kernel
Which failures to address?
• Most useful models will be much larger than our example– As the number of states grows, the number of failures grows
as the square of that• Thousands upon thousands of failure transitions
– It is infeasible to address all of them• One solution
– Create a rule for prioritizing failures– Generate prioritized list based upon rule and model– Start at the top– Stop when out of time, money, or have met a coverage criteria
(e.g., top 10% of failures have been addressed)

Failure likelihood
• We will extend state transition models to– Estimate the probability of a failure– Use this as a tool for • prioritization• Estimating the benefit of a security control
• Markov chains will be our primary tool

Markov chain
• State transition model plus a probability for each transition
• Sum of probabilities on the transitions away from a state must equal 1
• Right is an example with two states
0.5
0.5
0.9
0.1

Basic likelihood assessment
• The probability of particular failure transition occurring during an arbitrary execution is calculated by simulation– Start in the initial state for the model– Select a transition at random based on the
probabilities of the outgoing transitions– Repeat until satisfied (e.g., confidence interval is
sufficiently small)– Probability of particular transition is the number of
times it was taken divided by the total number
Other types of assessments
• Ranking of first failures– What are my most likely problems?– For each failure transition, calculate the likelihood
that it will be encountered first during an execution of the system
• Mean transitions to fail– How long until I encounter a problem?– Determine the average number of acceptable
transitions prior to the first failure transition

Security controls
• A security control reduces the likelihood of the failure transition that it addresses
data=noneactivity=idle
data=noneactivity=active
A failure mode
Driver for the network card incorrectly signals the arrival of a data packet
A security control
Require all drivers to be signed and then verified upon loading by the OS kernel

Challenges
• Probabilities are difficult to come by in practice– But there may be sufficient data to make a good guess– e.g., how likely is it that without authentication you
will be subject to an unauthorized user?– e.g., how likely is this is you use a particular password
policy?– Lots of real world experience to build statistics from
here; possibly sufficient data in other cases• Analysis can be quite involved (i.e., expensive in
terms of time and dollars)

Rewards
• A tool for guiding investment in cyber-security– To what extent does a security control reduce my
likelihood of a system failure?– Is the reduction worth the cost?– How much is enough? Are my expected failure
rates acceptable?

Consequence assessment
• We will extend state transition models to– Include time and dynamics– Use this as a tool for • Estimating the likelihood of unwanted physical effects• Determining performance requirements for security
solutions• Assessing risk
• Discrete event models will be our primary tool

Discrete event model
• All the elements of state transition and Markov models plus– Interactions with
the outside world (e.g., the system being controlled)
– Evolution through time
StateInput Output

Method for consequence assessment
Dynamic model of system under control
Discrete event model of computer system

Uses of a combined model
• Links failure analysis to physical consequences• Questions that might be answerable:– Which failures pose the biggest risk in terms of
physical outcomes?– How is my risk related to the speed with which I
can find and remove an intruder?– How does a particular security solution affect
these risks?

Challenges
• Performance characteristics for some security solutions may be difficult to obtain– For example, how quickly does an intrusion
detection system find an intruder?– How quickly can I remove that intruder?
• Analysis can be very involved (i.e., very expensive in terms of time and dollars)

Rewards
• A tool for both understanding risk and guiding investment in cyber-security– To what extent does a security control reduce my
risk?– Is the reduction in risk worth the cost?– How much is enough? Are my expected risks
acceptable?

Comments and questions?
?
Related Documents











