1 of 34 Programming and Simulating Robots with Microsoft Robotics Studio Ben Axelrod http://www.benaxelrod.com http://www.corobot.net

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1 of 34
Programming and Simulating Robots with Microsoft Robotics Studio
Ben Axelrod
http://www.benaxelrod.com
http://www.corobot.net

2 of 34
Agenda
• What is it?– In a nutshell
– “Supported” hardware
– Simulator
– Architecture
• Mobile Manipulator example• Look at some code• Running MSRS• Downsides• Demo (if time)

3 of 34
In a Nutshell…
• A distributed asynchronous service-oriented architecture (for robotics)
• CCR (Concurrency and Coordination Runtime)
– Message oriented programming model
• DSS (Decentralized System Services)
– service oriented application model
• Built on .NET
• A physics based simulator
• A visual programming language
4 of 34
Implications of .NET• .NET is Microsoft’s new development
environment
• Choice of languages: C#, VB, C++, Python…
• Requires: Windows XP, CE, Vista
• Most robots will be “tethered”
eBox-2300
5 of 34
“Supported” Hardware• Included with MSRS:
– Lego RCX + NXT
– Parallax BOE Bot
– fischertechnik
– iRobot Create
– KHR-1
– MobileRobots Pioneer P3DX
• Third party:
– CoroWare CoroBot
– Parallax Scribbler
– Segway RMP
– Robotics Connection Traxster + Stinger
– Princeton PAVE UGC car
• Sensors:
– SICK LRF
– Webcams
– IP Webcams
– Phidgets
– MS GPS
6 of 34
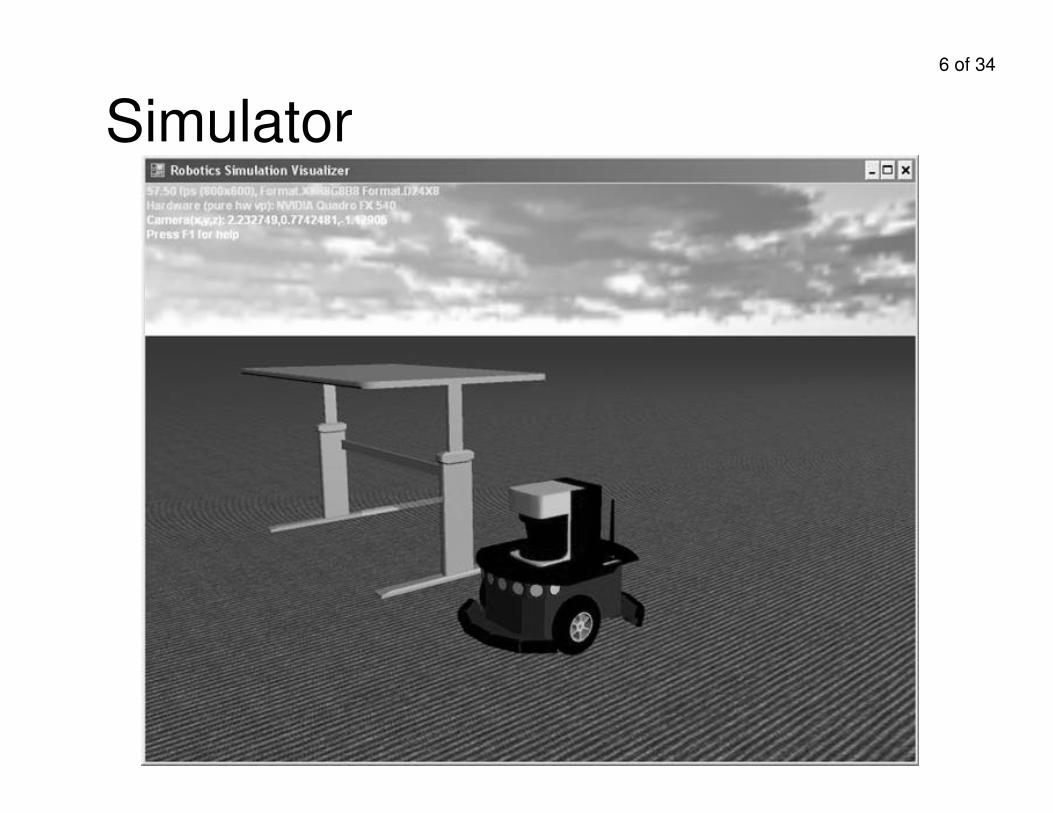
Simulator

7 of 34
Simulator

8 of 34
Simulator
9 of 34
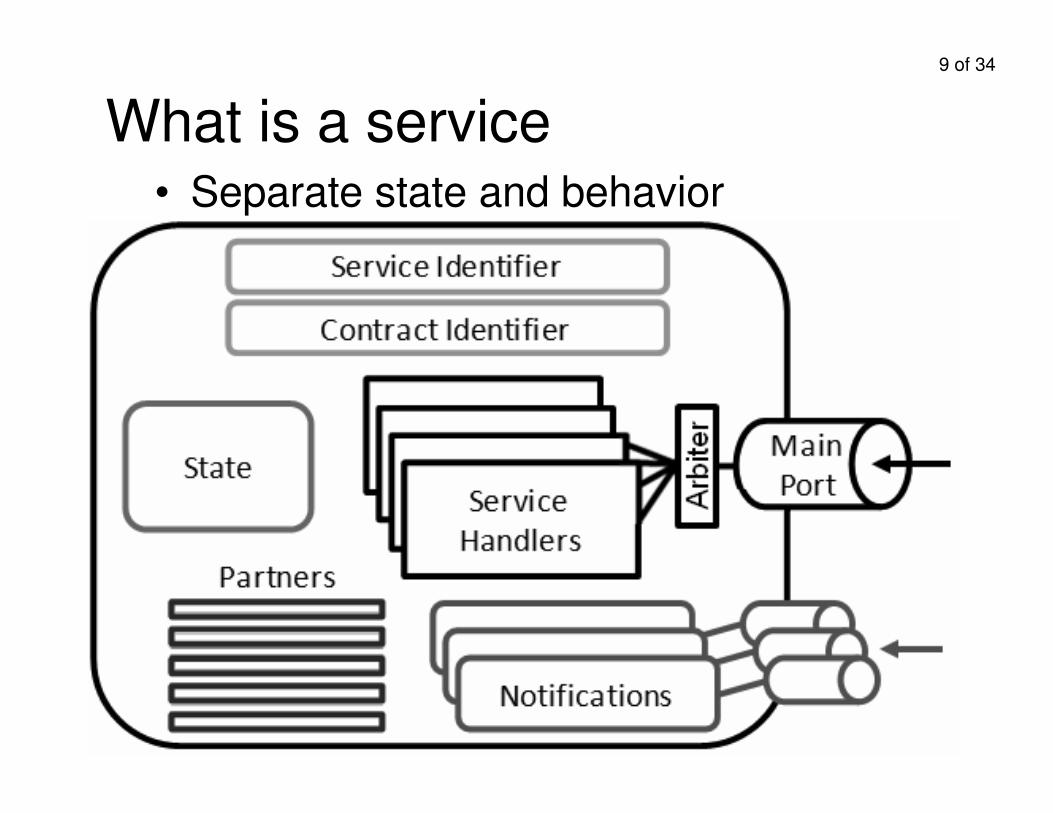
What is a service• Separate state and behavior
10 of 34
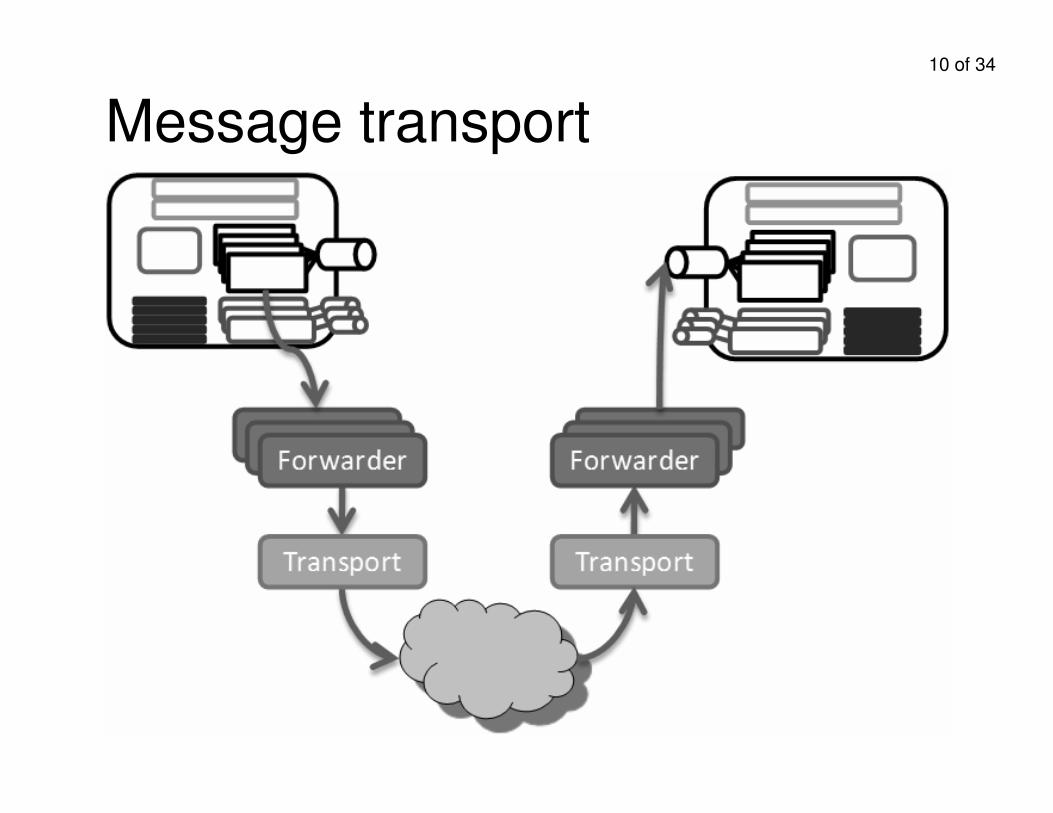
Message transport

11 of 34
CCR
• Coordinating asynchronous tasks
Receive
Task

12 of 34
CCR
• Coordinating asynchronous tasks
Join
Task
13 of 34
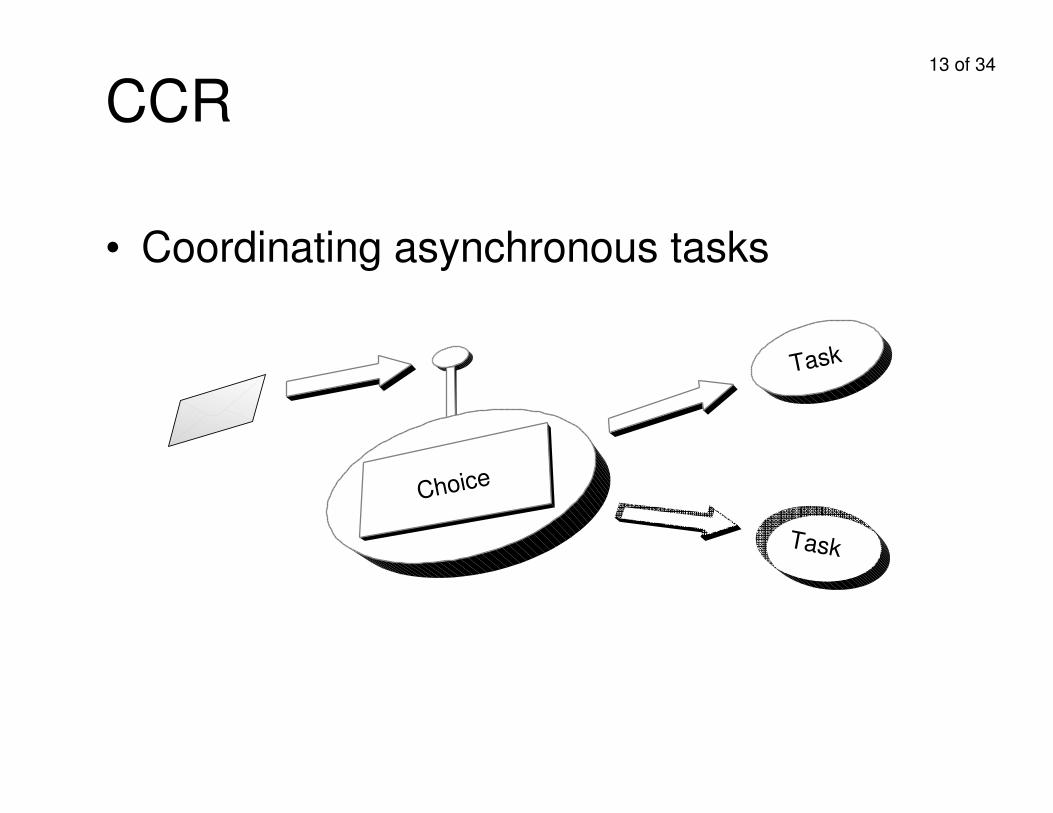
CCR
• Coordinating asynchronous tasks
Choice
Task
Task

14 of 34
Example – mobile manipulation
• GT Class Project
• KUKA KR-5 sixx R650
• Schunk PG-70 parallel gripper
• Segway RMP 200
• SICK LMS 291
• Objective: Serve coffee

15 of 34
• MSRS used as ‘glue’ for robot system
Example – mobile manipulation

16 of 34
Example – mobile manipulation

17 of 34
Standard Hierarchy
18 of 34
Code Example
• Custom line sensor
• We want to build a MSRS service that:
– Has some simple state
– Supports subscriptions
– Can be calibrated with a special message

19 of 34
Code
• Contract and class

20 of 34
Code
• Main port and message definitions

21 of 34
Code • Class
22 of 34
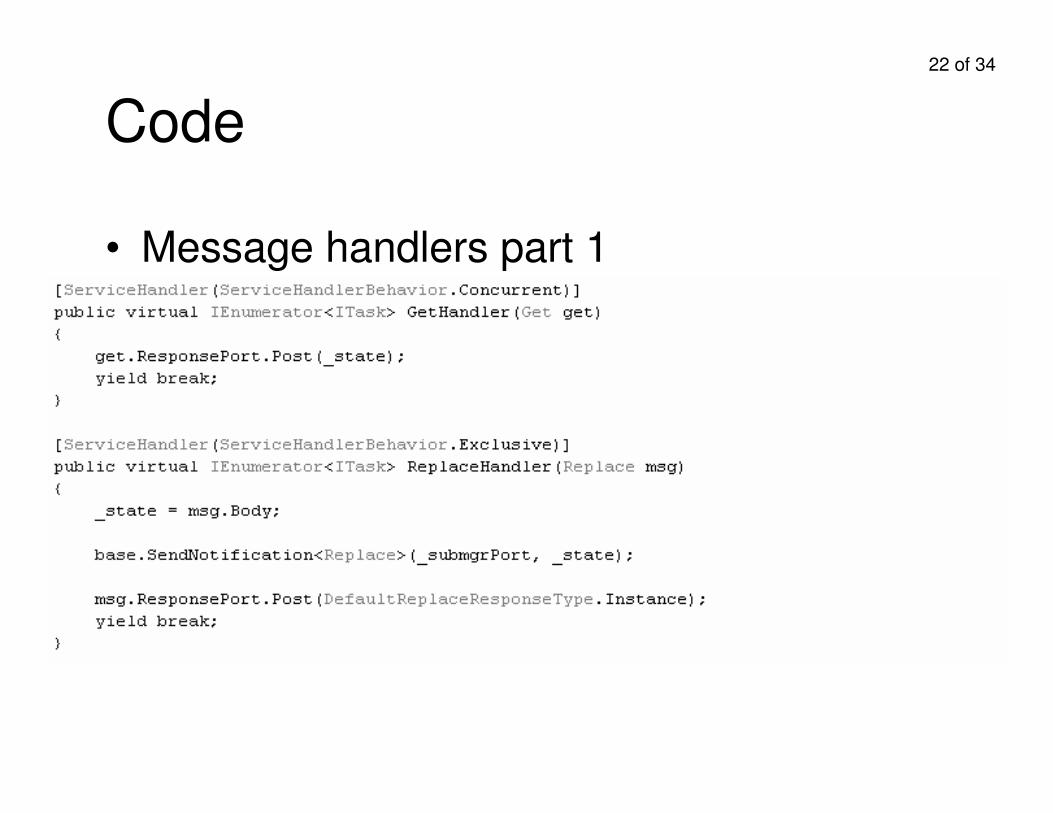
Code
• Message handlers part 1
23 of 34
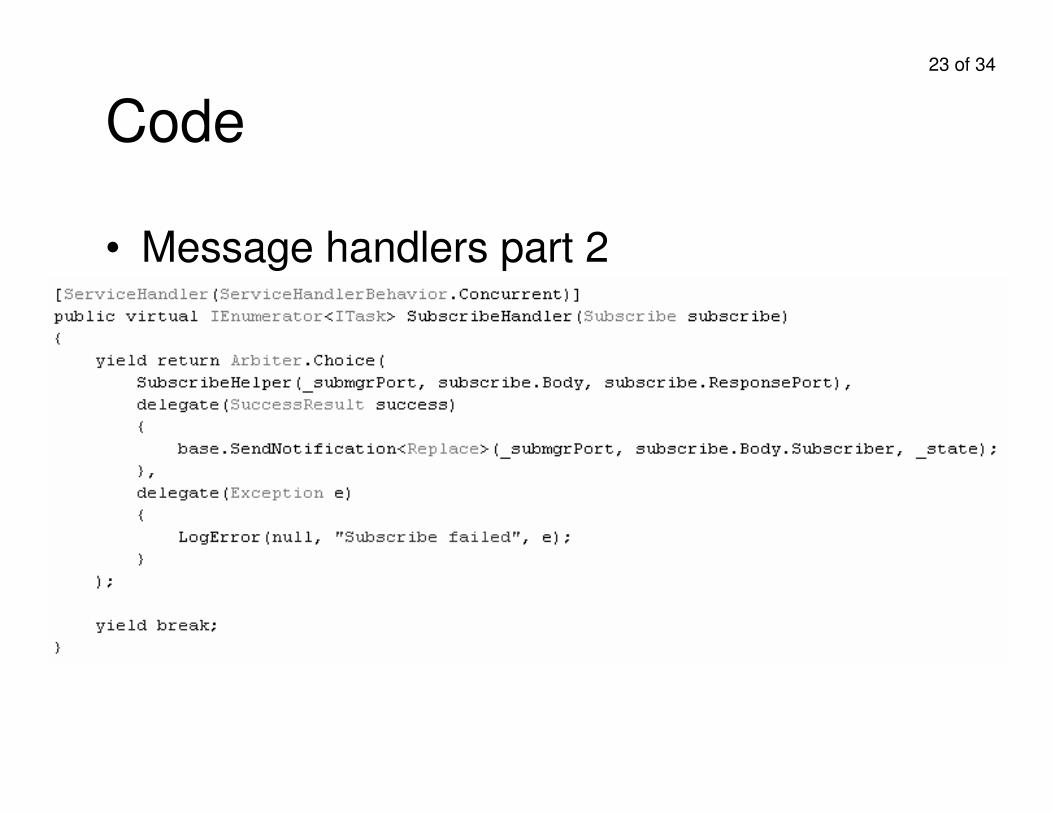
Code
• Message handlers part 2

24 of 34
Code
• Callback
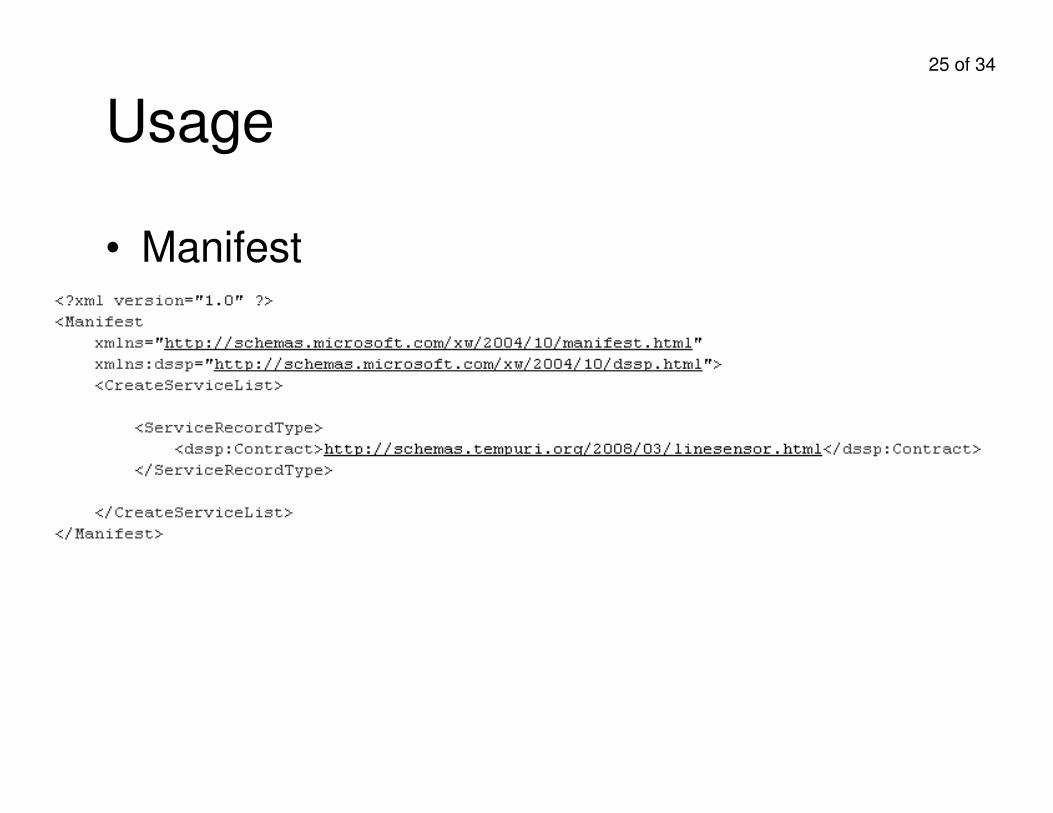
25 of 34
Usage
• Manifest
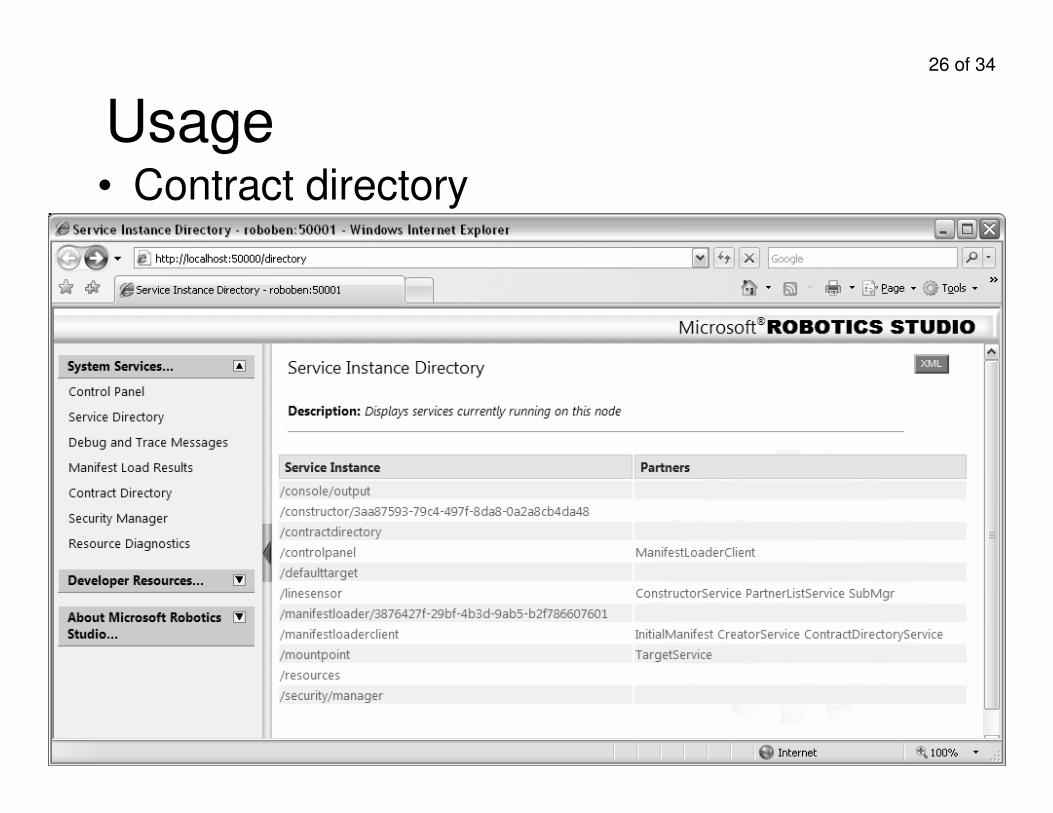
26 of 34
Usage• Contract directory
27 of 34
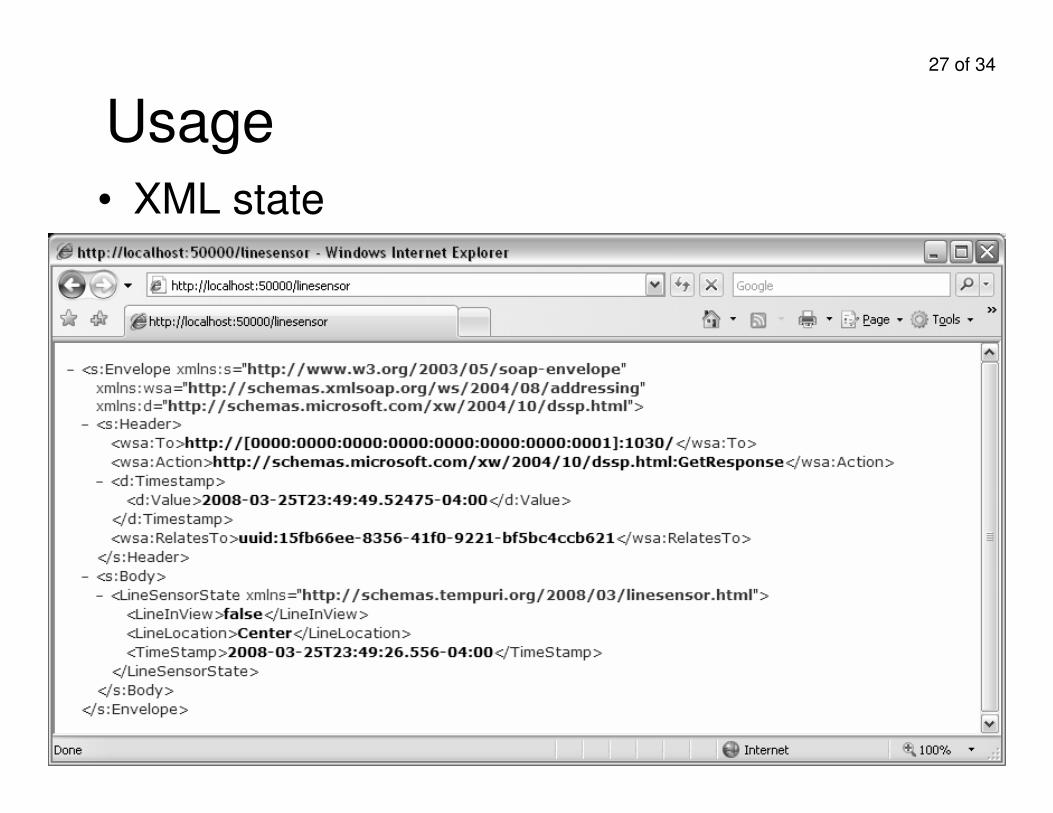
Usage
• XML state
28 of 34
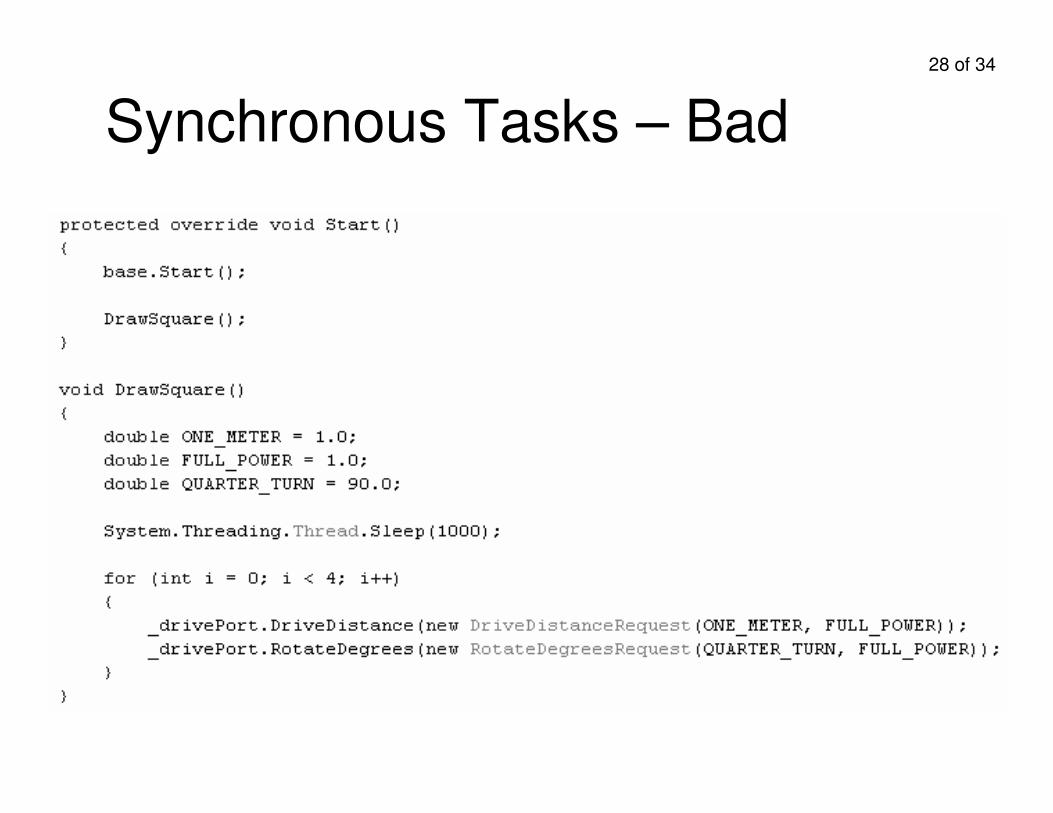
Synchronous Tasks – Bad

29 of 34
Synchronous Tasks - Good

30 of 34
Why I Like It
• .NET is great
• CCR nice for asynchronous code
– MySpace uses it
• It’s Microsoft
– MS on a robot is laughable
• Kuka uses it
– This is the direction robotics is going
• One home computer controlling all robots
• Everything now is off-board computation
31 of 34
Downsides• Steep learning curve
• Lots of boiler-plate code
• Can start services in many ways
– Partnerships break down with large numbers
• Requires a fairly fast computer
– I want to put code on a Gumstix
• Can be difficult to debug sometimes
• No contract inheritance
• Users must faithfully implement contracts
• Lots of pre-existing robotics code for Linux
• No distinction between “in” and “out” messages
32 of 34
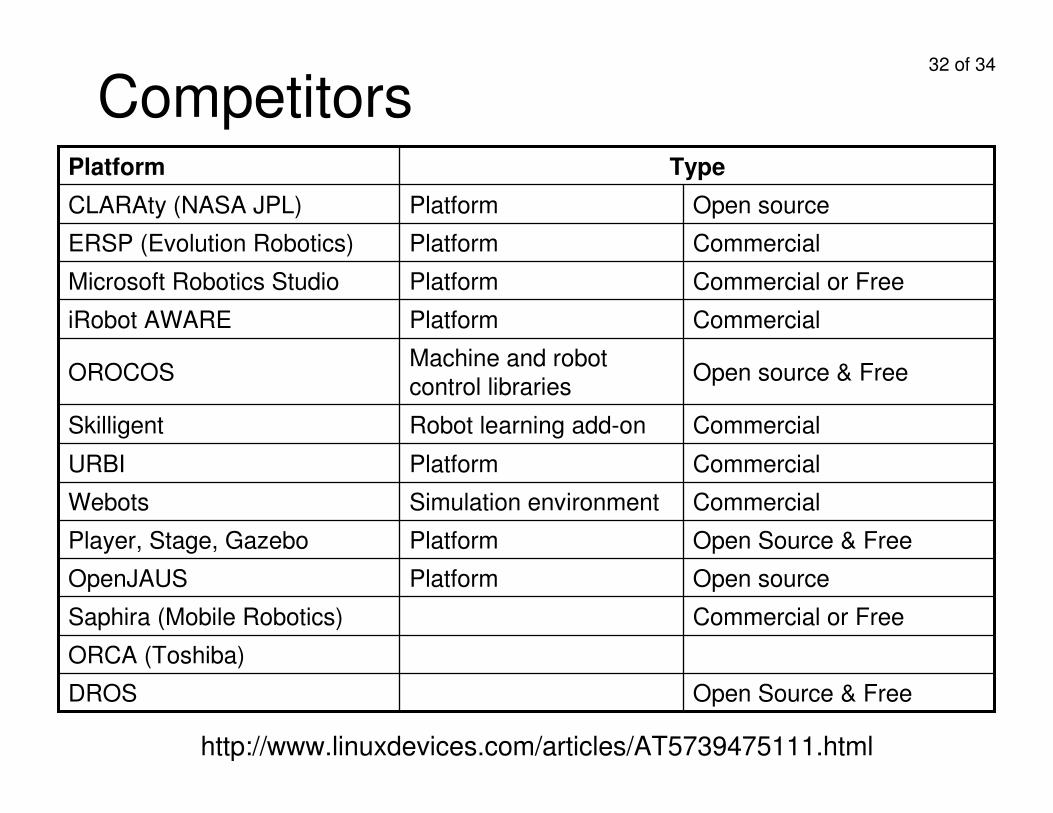
Competitors
ORCA (Toshiba)
CommercialPlatformiRobot AWARE
Open sourcePlatformCLARAty (NASA JPL)
Commercial or Free Saphira (Mobile Robotics)
Open Source & FreeDROS
Open sourcePlatformOpenJAUS
Open source & FreeMachine and robot
control librariesOROCOS
CommercialRobot learning add-onSkilligent
CommercialPlatformURBI
CommercialSimulation environmentWebots
Open Source & FreePlatformPlayer, Stage, Gazebo
TypePlatform
CommercialPlatformERSP (Evolution Robotics)
Commercial or Free PlatformMicrosoft Robotics Studio
http://www.linuxdevices.com/articles/AT5739475111.html

33 of 34
Resources
• Microsoft Robotics
– http://www.microsoft.com/robotics
– The team Blog, product downloads and community-support newsgroup are linked from this main page
– Wiki: http://channel9.msdn.microsoft.com
• CoroWare, Inc.
– Corporate: http://www.coroware.com
– ClassPack demo: http://support.coroware.com/forums
Programming Microsoft Robotics Studioby Sara Morgan
Professional Microsoft Robotics StudioBy Kyle Johns, Trevor Taylor

34 of 34
• RoboChamps: http://robochamps.com
Related Documents











