Proactive Mobility Management based on Virtual Cells in SDN-enabled Ultra-dense Networks Qian Liu l ,2,3, Gang Chuai l-" , Jingrong Wang' , Jianping Pan", Weidong Gao':",a nd XuewenL iu 1 ,2 I KeyLaboratory of Universal Wireless Communications, Ministry of Education, Beijing.Chin a 2Beijillg University of Postsan dT elecommunications, Beijing, China "Department of ComputerScience , University of victoria. Victoria, Be, Canada AbMracf-U ltrll- dt'nsc nct workinA (UDN) isa p romi sing te ch- nelogy 10 improve th e netw o rk capacity inth e next-gene r etlon mobile communication system.H owever, it hrin ~ .. in some new challenges to mobility manag ement du e til the frequ ent handovers and heavy signalin g overhead , The problem become, SCH' rt' forve hicles owing to their fast rom'ing speed , makin g it more sensitive to the handover delay with reactive handovcr decision. In this paper, dr-iven hya real-world vehicle mobility dat aset , we propos e a proactive mobilit y managemen t sclut innb ased on the virtual cell te chnique for vehicle s. Assiskd by a traj ect or y pre- dtcuon fr amework ba sed nn till' lonjt shor t-t e rm mcmor y neural network, rour function modules are d l 'Si~ n ed in the ce ntr a lized Snftwarc-B efincd ;'ol ct w or k i n ~ controlle r- to support the proactive selut ton . The c orres ponding siAnalinAprocedure is then ca refully designed, working with virtual cells to reduce the sfgnallngc ost. The prediction fram ework can ac hieve Sl ltisfatl ury performanc e of predictin g the next lo cation . The propnsed proactive solution climinate s the handov cr ddayan d reduces the ha nd over siAna linA C ClSt by 35% cumpared with the reactivea pproach. Index Terms-I'roaclh 'c mohility management, LSTl\I. tr ajec- tor y prediction , s i ~n a li n jt procedu re, vir tual celts. Un N I. I NTRODUCTION Ultra-densene twork ing (UDN)i s considered as a pillar technology for the next-gene ration mobil e commu nicat ion systemt oen hancet hesys tem capacity in hotspots[ I].H ow- eve r, mobility manage ment beco mes more co mplexb ecause of the ultra-densea nd irregu lar deployme nt of the next- generation Node Bs, i.c., gNHs. Hundovcr happens frequently, and ac oord inated multi-cell trans missionsc he meh asbee n proposed to solveth is problem [2]. Use rs ca n receive data from multipleg NBs as ift here isa virtual cell aro und them (3). Thec omplex signaling interactions introd uced by virtual cel ls deter ioratem obility manage ment. The Software- Defined Network ing (S DN)t ec hnologyprov ides an innovat ion enable r( 4). The log icallyc entralized SDN co ntroller maintains ag lobal view of thene twork and makes itm ore flexible[ 5]. Mohility manageme nt based 0 11 SDN-enahled virtual cells becomesa hot research topic in UDN. In theex isting works, mo bilit ye nhancements basedon virtua l cells were proposed, which are ass isted by anc hor bases tatio nsi n the het erogeneous network 16], [7]. Some rese arches lookat mobility managemen t based on anar chi- tecture integrati ng the virtual ce ll tec hn iquea nd SDN [8]. 191, which mai nly focusedo n pedestrians. Therea re many bicycles. buses, and vehicles loadedw ithp assengers in UDN. Otherr esea rches propose dt he realiz ation s of virtual cells con- sidcringv ehicles-to-infrastructure communications 110].[ I I]. Howeve r, the form ation of virtual cells iss till reac tive, i.e., gNBsf orm av irtual cell ce nter ing att he current locat ion of the vehicle. Besides, theyd id notpro videa complete mobility managementso lutionf or virtual cells. In the tra- d itional reac tive method , thes elec ted gNBs startt o provide services after the measurement, decisio n and signaling inter- action proc edures . Unfortunately, the newg NBs may become invalidsoo nbe causeo f the high-speed movement of ears and densed eploymento f the gNBs. It will result in more useless handovcrs.a nd thein creased handovc r signali ng cos t is a heavy burden fort he network manager. The mobilitypa ttern of usersc anb e pred icted e fficiently with the development of mac hinel earni ng 11 2]. If weca n start the handovc r preparat ion inad vanceandr easonably selectthe serving gNHs according to the predic tednex t locatio n,weca n reduce the frequent h andovc r and the signalingc ost. The ref ore , we proposea pro active mobili ty manage ment solu tion based on virtual cells in this paper. First , we proposea predict ion frameworkba sed on the longs hort-term memory( LSTM) neuraln etwork to pred ict the trajectory of movingve hicles with a data-driven approach. Next, we design four function mod ules for theS DN co ntroller tom ea sure the quality of gNBs and build virtual cells in advance basedo n the predicted next loca tiono f vehi cles . It eliminatest he handover delay by startingt heh andove r procedure before users reach thenex t location . Then, we carefu llyd esig n the sig nalingpro cedure based on our virtual cell construction. Thea dvantages of the virtual cell architec ture andth eopti mized signaling procedure greatly reduce thes ignal ing overhead in the mohili ty man- agement process . The proposed solution reduces theh andove r signa ling cost by 35% compared with the reac tivea pproach. Theres t of the paper isorg anized as follow s: thesys tem model in Section II,o ur proactive mobility manage ment solu- tion inS ect ion Ill , the analysis in Section IV, numericalres ults in SectionV , and the conclusion inS ect ion VI. II . S YSTEM M ODEL In thissec tion, we describe the sys tem model and as- sumptions. As shown in ri g. I, thec onsidere d area with rad ius R is covered hyacen tralized SDN co ntro ller and itm anagesa ll g NBs . Thev irt ual cel l of user j is de- signed as a circular area around the userw ith radius D, a Vi = {g NB ; E lPgNB, lx i - x jl ::; D} . x; and Xj denote the 978-1-7281-2373-8/19/$31.00 ©2019 IEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Proactive Mobility Management based on VirtualCells in SDN-enabled Ultra-dense Networks
Qian Liul,2,3, Gang Chuai l-" , Jingrong Wang', Jianping Pan", Weidong Gao':",a nd XuewenL iu1,2
I KeyLaboratory of Universal Wireless Communications, Ministry of Education, Beijing.Chin a2Beijillg University of Postsan dT elecommunications, Beijing, China
"Department of ComputerScience , University of victoria. Victoria, Be, Canada
AbMracf-Ultrll- dt'nsc nct workinA (UDN) isa promi sing tech-nelogy 10 improve th e netw ork ca pacity inth e next-gene retlonmobile communication system.H owever, it hrin ~ .. in some newchall enges to mobility management du e til the frequent handoversand heavy signalin g overhead , The problem become, SCH' rt'
forve hicles owing to their fast rom'ing speed , making it moresensitive to the handover delay with reac tive handovcr decision.In this paper , dr-iven hya real-world vehicle mobility dat aset , wepropos e a proactive mobility management sclut innb ased on thevirtual cell technique for vehicle s. Assiskd by a trajectory pre-d tcuon framework ba sed nn till' lonjt short-t e rm mcmor y neuralnetwork, rour function modules are d l 'Si~ n ed in the centr alizedSnftwarc-Befincd ;'ol ct w or k i n ~ controlle r- to support the proactiveselut ton . The corresponding siAnalinAprocedure is then ca refullydesigned, working with virtual cells to reduce the sfgnallngc ost.The prediction fram ework can ac hieve Slltisfatlury performanc eof predictin g the next location. The propnsed proactive solutioncliminate s the handov cr ddayan d reduces the ha ndover siAnalinACClSt by 35 % cumpared with the reactivea pp roach.
Index Terms-I'roaclh 'c mohility management, LSTl\I. trajec-tory prediction, s i ~ n a li n jt procedure , virtual celts. Un N
I. INTRODUCTION
Ultra-densene twork ing (UDN)i s considered as a pillartechnology for the nex t-gene ration mobil e communicat ionsystemt oen hancet hesys tem capacity in hotspots[ I].H ow-eve r, mobility manage ment beco mes more co mplexb ecauseo f the ultra-densea nd irregu lar deployme nt of the nex t-gene rat ion Node Bs, i.c., gN Hs. Hundovcr happens frequently,and ac oord inated multi-cell trans missionsc hemeh asbee nproposed to so lveth is problem [2]. Use rs can receive datafrom multipleg NBs as ift here isa virtual cel l aro undthem (3) . Thec om plex signaling interact ions introd uced byvirtual cel ls deter ioratem obility manage ment. The So ftware-Defined Network ing (SDN)t echnologyprov ides an innovat ionenable r( 4) . The log ica llyc entralized SDN co ntro ller maintainsag lobal view of thene twork and makes itm ore flexible[ 5].Mohi lity manageme nt based 011 SDN-enahled virtual cellsbecomesa hot rese arch topic in UDN.
In theex isting works, mobilit ye nhancements basedonvirtua l cells were pro posed, which are ass isted by anc horbases tatio nsi n the heterogeneous network 16], [7] . Somerese arches lookat mobility managemen t based on anar chi-tecture integrati ng the virtual ce ll techn iquea nd SDN [8].191, whic h mai nly focusedo n pedestrians. Therea re manybicycles. buses, and vehicles loadedw ithp assengers in UDN.Otherr esea rches propose dt he realiz ation s of virtual ce lls con-
sidcr ingv ehicl es -to-infrastruct ure commun ica tions 110].[ I I] .Howeve r, the form ation of virtual ce lls iss till reac tive, i.e.,gNBsf orm av irtual cel l center ing att he current locat iono f the vehic le. Bes ides , theyd id notpro videa completemobility manage mentso lut ionf or virtual cells. In the tra-d itional reac tive method , thes elec ted gNBs startt o provideservices afte r the meas ureme nt, decisio n and sig naling inter-action proc edures . Unfor tunately, the newg NBs may becomeinvalidsoo nbe causeo f the high-speed movement o f ea rs andde nsed eploymento f the gNBs. It will result in more uselesshandovcrs.a nd thein creased handovc r signali ng cos t is aheavy burden fort he network manager .
The mobilitypa ttern of usersc anb e pred icted e fficientlywith the development o f mac hinel earni ng 11 2] . If weca n startthe handovc r preparat ion inad vanceandr easonably selecttheserving gNHs according to the predic tednex t locatio n,weca nreduce the frequent handovc r and the signa lingc os t. Therefore ,we proposea pro active mobili ty manage ment solu tion basedo n virtua l ce lls in this paper. First , we proposea predict ionframeworkba sed on the longs hort-term memory( LST M)neuraln etwork to pred ict the trajectory of movingve hicleswith a data-dr iven approach. Next , we design four funct ionmod ules for theS DN controller tom easure the quality ofgNBs and build virtual ce lls in advance basedo n the pred ictednext loca tiono f vehi cles . It eliminatest he handove r delay bystartingt heh andove r procedure before users reach thenex tlocation . Then, we carefu llyd esig n the sig nalingpro cedurebased on our virtual ce ll co nstruc tion. Thea dvantages of thevirtual cel l architec ture andth eopti mized signaling proceduregreat ly reduce thes ignal ing overhead in the mohili ty man-agement process . The proposed solu tion reduces theh andove rsigna ling cos t by 35% compared with the reac tivea pproach.
Theres t of the paper isorg anized as follow s: thesys temmodel in Sec tion II,o ur proac tive mobility manage ment so lu-tion inS ect ion Ill, the analysis in Sec tion IV, numer icalres ultsin Sec tionV , and the conclu sion inS ect ion VI.
II . S YSTEM M ODEL
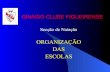
In thissec tion, we describe the system model and as-sumpt ions . As shown in rig . I, thec onsidere d area withrad ius R is covered hyacen tralized SDN contro ller anditm anagesa ll gNBs . Thev irtual cel l of user j is de-signed as a circular area around the userw ith rad ius D,
aVi = {gNB; E lPgNB, lx i - x jl ::; D} . x ; and Xj denote the
978-1-7281-2373-8/19/$31.00 ©2019 IEEE

( 2)
(3)
(6 )
(5)
1
1 + EII ;j [SIXRl'ilot.ij] ".~ f~ ~~D
Ih;i ! (I - a ~ 2) ,iE ' '' ~ N"n Vj
I II . P ROACT IVE M (lA tLJTY M ANAGEM ENT
It =
SIXR =
blocks dedicated toc hannel state estimation.
L ; E 1> ~ Nn nV j ( 1 - O"l\Il\ISE. i/) Ihij l"l (/v;'
l oss + i , + t , + 1/,/wherel es t is the residual interferencedu e to imperfect CSI,which is
and 1/ is thesig nal-to-noisera tio.
I CSI = :L O" ~I l\ I S E. i / lh i j l "la v; E , (4)i E 1>~ND nV ,
Inth e proactive mobility management solution.the servingbase station of a user isav irtual cell, t.e., a cluster of activegNHs in the virtual cell area. It is quite different from thereactivea pproach, andw e need to redefine the definition ofhandovcr. In the proposed solution, ah andover is a change oftheac tivationl ist of gNHs. When a user moves, the coverageof itsv irtual cell changes hut the activation listm ay not. Thebenefito ft his definition is toa void useless handovcr andreduce handovcr frequency. Ifw e have an accuratepr edict ionof a user's trajectory, theS DN controller can obtain an optimalactivationl ist of gNHs and startt hes ignaling proce dur e ofhandover in advance. It will greatly reduce handovcr delayand improve thee fficiency of handover. The proactive mo-bility managementso lution consists ofthr eeas pects: I)theframework of trajectory predictio n; 2) the des ignoffu nctionmodules intheS DN controller; 3) the handovcrs ignalingprocedure.
Ie ist he interferencec aused by gNHs outside avirtu al cell,which is
Ie is the interferenceca used by inactiveg NHs in av irtual cellwhen iax=iu2, which is
Thesigna l-to-interference-plus-noise ratio(S INR) at user jis shown as
A. Framework of trajecto ry prediction
LSTM network is a kind ofr ecurrent neural network (RNN).It iswe ll-suitedf or classifying andm aking predictions basedon timese ries data [151. In thissec tion, wc build a predictionframcwork based on LSTM to infer the next loca tion oft axisby their partial historical trajectories. The predictio n will usether eal dataset of taxi rides inRom e, Italy.
(I )
locat iono f gNH i and user i. respectively. The gNHs with theOpenFlowp rotoco l arc distributed with as tationary PoissonPoint Precess (PPP) \[)g r'\ll of density ..\gr'\ ll ' hij = .;r;Jf ij isthe channel gain foru ser j from gNH i withth e correspondingpath-loss tij = IXi - x j l- (\', and n > 2 is thc path-lossexponent. Assuminga Rayleigh fadinge nvlronrnent, {Iij }are independently andide ntically distributed (i.i.d j complexGaussianr andom variables with zerome an and unitva riance.Eac h channel ises timated independently.
The non-coherent joint transmission (NCJT) mechanism isusedto constructvirt ual cells in this paper. All active gNHs inav irtual cell createa composite channel by NCJT to provideservicesforth e user. The references ignalr eceivedp ower(RSRP) of active gNHs needs to he largerth ana threshold T .The indicator (l~ ' E {O, I } reflects whetherg NH i isac tivated.(l ~ ' = 1 meansac tive, and (l~ ' = 0 is inactive. iax is theresource alloc ation scheme. ial 'means the resourcea llocatedforNC JT cannot he reused by other inactive gNHs ina virtualcell. ia"l isa reusesc heme. The optimal D, T, and iax liredetermined in [131. Weco nsider the channel estimation errordue to imperfect channel statei nformation( CSI) as ane winterferencesourc e, and it cannot be ignored. Therefore, theaggregatei nterference mainly includes three categories. Thefirst is the interferenceca used by inactiveg NHs in a virtual cel lwhen there sourcea llocation scheme is io2 • It is noticed that itiszerow hen the resource allocation scheme is ia l. Thes econdis the interference causedb yg NBs outsidea virtual cell. Thethird is the residual interferenceca used hy the imperfect CSt
5 j denotes the transmission signal to user i- O" Kl ~ I S g , ; j is theminimumm ean-squaree rror of the i-th channel estimatefo rthe j -th user, and 7lj is the corresponding complexG aussiannoise with zero mean and variance a;'. The received signal atuser j isg iven hy
Yj = L J(1 - O" h t h t S E . i / )h i j S j a ~~ '; E 1> ~ I< D n Vj
+ :L hij S j ( I - a ~ ' ) + L hijSji E <l>~N D n V j iE 1>~ N Dn V j
Fig. I: Then etwork architecture
For pilot-based channel estimation, aK l~ ISE . i j has thes imi-lur form with [14). N"il<>l is the total number of pilot resource
--- Op;nf "'"

----. - i -- ii- flll;fl:X (m) ,,..., - '"
(a) Coordinate,
.,"e3
.ol~2_5
>" 1 1- '''' I~ :~ , - Predictio no .5 ~ - l -~ -6 -fO I -r-r 4
X(m) ....." .....(b)Coordinate s anddistance
In f ig. 2, taking taxi2asa n exa mple,M HDu sing theorig inal predict ion method is 0.256 km. Arter co nsider ing thed istance and angle information , MHD is red uced by 45%.MH D with the proposedm ethodisa hout0 .1 km o n average.f rom the above resu lts. weca n sec thatourp redictionfra me-workh as improved the performanc e bya dd ing these quenceo f distances aswe ll as thea ngle information .
B.Function modules ill the SDN controllerFig. 2: Pred icted trajector ies
' (¢, -¢,) , ( ~, - >., )p = sin 2 + eos(¢I ) eos( 02) sin 2 '
(')where 0 is the latitu de, A is the longit ude, and t- is the Earth'sradiu s. l.c., 6,37 1 krn.
However, the prediction errors with coo rdina te itself farexceed the average coverage of ag NH (radius=O.O·n km).Thisca nnot provide mea ningful assis tancef or the proactivemobilit y management. There fore , wea dd a data seque nceo fd istances between twoco ord inates 10 assist thepr edictiona ndimprove theac curacy. First, weex tractt he angle informat ionbetwee n the current loca tiona ndth e pred icted loca tion . Then.wec om bine the extracte d angle informat ionwit h thep red ictedd istance toge nerate anew pred iction .
J' Datase t: The Mobility Traces of Rome TaxiC ahsdataset containst he GPSc oordina tes o f appro ximately 320taxisco llected over 30 days. Wer andomly choose len taxis(II) = 2, 17,39, 55,6 8,87, 139, 196. 222, and 36 1) andu scthef ollowi ngfea tures as thei nputso f our framework.
• Tax i Il) : It contains a unique ident ifier for eac ht axidriver ;
• Location : It co nta ins a list of GPSc oordina tes o fe achtaxieve ry 15 s.
2, Prediction f ramework: We establish a three-lay er LSTMneural networ k with the first layer o f 20 neurons, the secondlayero f 50 neurons, and a dense layer. A movi ng windoww ith19 records is used to predic t the loca tion of a taxi in the nexttimeslot . These optimized parameters are selected with ag ridsearch. We create two data seque nces (coordina tes: long itudesand latitudes) and use the m as the input ofthe frameworkto predict the next locat ion and distance. Thefi rst layer willreturn the resu ltso ne hy one to the next laye r as trainingda ta.In the second layer, the lirst 1Mvalues pass theiro utpu t valuesto the laye r itsel f,as the input value for the next operation.However, for the 19th input, the second layer passes itso utputtoth e next dense layer. Then the dense layeru ses therea l valuefor losscalc ulation and optimization.
Mean Havcrs inc Distance (MHD) is introducedas theeva luation metrico ft he prediction per formance. The d istanced between two pointsi s based on their latitude and long itude,which ca n he com puted as[ 16)
(9)
In th is paper . the SDN co ntrollerh as four function mod-ules for proact ive mobility munagc mcnt. It isi n charge ofmeas uring the quality of gNHs.buildi ngv irtual cells. maki ngactivationd ecision.a nd executing the hand ovc r process. Themain function modu les o fp roacti ve mobili ty manage ment inthe SDN controller includet he fol lowing aspects .
J) Measurement control: Inth e mea surement control mod-ule, theco ntro llern eeds to determin e measurement parumc-tcrs.s uch as them eas urement per iod, region. and report .
(i ) Meas urement period: Let iJ = 10% denotet hem aximaloutage probabilit y. Th e probabilit y o f SI:\"R < iJ isapproximatelyn car zero inthe virtua l cell region . So.we choose the mean res idence time of a virtual ce ll asthe maximum Te • Accor ding to [17J, the cross ing rate ofa gN H area for a moving useri s derived as
2v1"11 :"'8 = ~.
V 1l"O
( s - S ) (C -C)Q (Te) = e x T'S.I _ T.- - / 1 X T'CI ~ T.- ,T ~~t T ~ _t
( 10)
where n is the ci rcle cove rage of a gNH and v is thespeed with an average of 11.12 m/s . Th emea n residencetimeo f thea rea is: E [t] = -'-. When D = 122 rn.
-'~ND
the minimal E It] = 17.22 s,w hich is larger thant hepred iction period 15 s. Th us. we se t the maximum Te tohe 15 s. Tc noto nly affectst hesig naling cost , hut also hasa great influ ence onth e transmiss ion capacity. funct ionQ isd esigne d to choose theo ptima l Te • which aims tobalance the trade-off between these two memes.
where e and II arc the impact factors of signaling costandtr ans missionca paci ty. respectively.
(ii) Measu reme ntr egion: In order 10b uild the next vinua l cel lahead of time, we need 10 measure the potentialse rvi nggNHs in advance. The next loca tion of a user at next T; ispredicted byo ur framewor k. Inourp rev ious work [13J.we ob tained the optimal radius D of virtu al cells .
(iii) Measu reme ntr eport: Them easu rement report includesthes tate inform ation (RSRPs) o f all gNHs in the mea-sureme ntr egion and thes tatein format ion (loca tions andtraffic loads) o fu sers.
2) Activation control: The SDN con troller updates the listo f ac tive gNHs period ica lly. The user com paresthen ew listwith the old one and d ivides itsact ive gNHsi nto three classes:newgN Hs. old gN Hs, and ongoing gNHs. The old gN Hswill ju st transfer the buffered data packetan dth en re lease
(7 )d =2x rxarctau(J P ) ,1 -p

Then, it sends connectionr equests andr elease reques ts simul-taneously to new gNHs and old gNHs, respect ively.
St ep 5: The newg NHs which rece ivet heac tivation requestsend connectionr equests to the OpenFlows witch. At thesa metime, the old gNHs which rece ive therele ase requestsse ndrele ase reques ts to thesw itch.
St ep 6: TheOp enFlows witchre spectivelysen ds connectionrepliesa nd release replies to gNHs.
Step7 : The newg NRs build connectionswi th the userand transfer the data.T hen, they send connection acknowl-edgmcms (ACKs) to the user.S imultaneousl y, theo ld gNHsdetac h data paths. Then, they release ACKs to the user.T heongoing gNRst ransfe r the buffe red data continuously.
Our proposed proactive solution will he compared withthereactive solution [XI , in which a reactive hundovcr sig na lingprocedure is provided.
IV. PER fORM ANCE M ETRICS
,
A"''''i {""",ro!, ~ dm "."", ("on,,,,',1_ .. Contrnl
' l"U",, : Con"",''''"P'", 1«10"", ,
..,u... Pbno r ,n,",,,,,,, 1k
- ~ '!' ~ ~~-""""" llq>on
------.~"" -
"ob' l
(."Upd... ~ . ,""'" l ...
h<,OI Oaa- - - ----- ~ ------S,nollron""".,.,
~ __!!" !':!P!'"~ ____________r "' l..<!.~
LiE Onsoing 0'" s.'" SD\ 0>l!'\Ih 111'. B, 111'.B, {"o'''r IOT S",;' ch
'1.-..-cntc",, 1R>i111M. "' -
where T is the time of transmis sion andpro cessing latency inu hando ver process . from fig. 3 and [81 , we o btain T pro andTn,,, sepa rately.
A. Handover cosl SThe handov cr cost S is thetran smission and processi ng time
of hnnd ovc r inth e whole simulation area. Ino ther words.i ti sthe number of handovers 1\''''''1<t''''''r in the simulation areafo ra typical usermu ltiplied by the time fora hn ndov e r process.
As a user moves, the activation listo f gNHs will change.At this point, theS DN cont roller needs to perform the cor-respo ndings ignalingt o complete the handovcr . We define ahandovcr cost S 10 evaluateth esig nalingo verhead.B es ides.weu sc the handover failure rate (HfR) to reflec t them anage-ment efficiency of different solutions.
Fig. 3: Proactive hundovcr signaling procedure
allr esources. The new ones will synchronizewith the user.Theong oing gNBs maintain their transmissions.
3) Admission control: The SDN controller determines thelist of active gNBs. Then. theco ntroller executes thead missioncontrol 10avoid overload. If the traffic loud ofa gNB exceedsa threshold. thec ontroller willre move it from the list. Thenext available gNB willt ake its place.
4) Handover control: When the SDN contro ller updatesthe listo f active gNBs, the process of han d ovcr is triggered.However, the controller still needs 10 wail a time-to-tr igger(TIT) time todeli ver the new list to a user. ~ >r o is the timeof a han dov c r procedureb y the proactive solution and itsva lueis defined by (1 3). Every list has its TIT, and
S = E P\'''andovcr]x T , ( 12)
(II)T pro = 4 TO F _Switc" + 8Pg N" B + :JP SD :-J - Con trolt,·" ( 13)
Tre" = 4TO F_ Switr ], + l :IP g r\1l + 2 P <;D N-C "utrull,. r . (I~ )
where 1'gNB is the border crossingr utco f ag NHf ora userandi s obtained hy (9). "{g is the Poissonses sion arrivalr utc.With the dens ity of gNHs AgI'\B' weca n rewrite (9) as
where 7(W - Switd, isa transmission la ten cy between gNH andthe Opcnl-low-enablcd switch, P g:-'B is the processing latencyatth eg NHs. and H;[)1" - Contrullcr is the latencya t the SDNcontroller. NhandoW'r is the numberof handovcrs within thesimulation area. i.e.. the number of timesof am obile usercrossing a particular gNB in the simulation areawithi n thetime interval bet ween thed ata pac ket sessions. It is given by
E [A'h"ndover] = 1'g:-J1l X ; X p. ( 15 ),
( 16)2,1'gNB = r=;:v r.a
C. Handover signaling procedure
Wed esign a handovc r signalingpro cedure tos upport ourproact ive mobility managemen t solution in thiss ection.W eshowth e main stepsoft hep roces s inF ig. 3.
St ep L The SDN controller executesth e module ofm ea-surement control. It determines them easureme nt period andmeas urement region. Then. the controller sends a mea sur ementrequest periodically to u user.
St ep 2: The userr eceives themeas uremen t requesta ndmeas ures thes tates of gNBs. Then, it creates am easure mentrepo rtand sends itt ot he controller.
Step3 :T he SDN controlle r exec utesth e moduleso fa c-tivation control and admission control.T hen, itupd ates theactivation list of gNHs and triggers the handoverco ntrol. Aftera TIT time, theco ntroller sendsth e new list to the user.
Step4 :T he userr eceives theac tivationl ist andd ividesthe current active gNRsint ot hreecla sses mentioned above.

TABLE I:Sy stem paramet ers in the simula tionp is the handovc rp rob ability withint hes imulation areaa ndis g iven hy Value Value
(1 7)
The hando ver cost S is rewritten as
RD
Npilot
"'ITw
6 km0. 122 km
92,162
odB m0.5
AgNBA,
Coy.10F_Swit ch
Pgr->B['SDN-coll\ roIlN
17-1 !killI M:~,io nf~
-1.6 1lP'I'H1.t mx 1-11
-I Ill' 1181.:\ m-, [181
Handover costso f the proactive and reactive solutionsare
B. Handover fail ure rate
Int his work, we do not differentiate when the handovcrf ai lureocc urs. The handovc r fai lure rate (HFR) isc alculated as
B. Handover performa nce
I) Signaling CO.l'I : Accordin g to (19), handovcr signalingcos t S isa ffected by b oth the numbe r of ha ndo vcrs andthe h and ovc r execution time. Whenc omparing the handoversignaling procedure o f the proposed proact ive and existingreactive solut ions, our approach simultaneous ly exec utest heprocesso f activatingn ewg NHs and relea sing old gNHs (step4, 5, 6, and 7 in fig. 3). Th us, Tpro can save 17% inhandovcr execu tion timew hen compared with Tn'" = 1I.lInss. The proactiveso lutional so helps reduce freq uent hando vcrshy acc uracy trajectory pred iction .T herefore, the propo sedsolutionc an e fficiently decrease the handovcr cos t as showni nFig. 6 . We cla ssify thet rajec torieso f all taxis into four patternsaccording to their characte ristics. i.e., travelin g ins traight lines(P I) , making turns (P2), making If-turns (P3) and circl ingaround (P4) . In thes ame durat ion (450 s), thec umulativehandover signaling cos tso f the twoso lutionsd ecreasefro mP It o P4. As thea reast axis passing through shrink, fewerhandovcrsa nd signaling costs arcn eeded. On the other hand,thega ps between two solutions also decrease from P I to P4,i.c., 2 .28. 2. 11, 1.63. and1. 62s. The trajec tory pred iction
A. Ttieo ptimalm easurementp eriod T;
From the analysis in the previous section, the maximal T;is 15 s. Th e larges t T; greatly reduces the sig nalin g cos t. Itiss traightforward for thisr elationship.W hen T; is large, itrnca ns that we do notn eed to make hand ovc r decisionsv eryoften, and the number of handcvers is natura lly reduced. Thehandover signaling cos t S is reduced as well.
However,a large Tc docs notal ways bring benefits. Asshownin Fig. 4, taking taxi 2 asa n example, the systemcapaci ties underd iffere nt speeds o ft he vehicle arc inves ti-gated. Whe n v = 0.0 1 mis , the vehicle is nearlys tationary.T; docs not affec t thesys tem capaci ty. With as peed of 10.93m/s and the increase of Te , after slightly fluctuat ingbetw een4 hps/Hza nd :'\ bps /Hz, theca pac ity continuously decreases.Thec apacit y loss betwee n T; = 8 s and 10 s is 50%. Under thehighs peed , the capacit ies dramat ically droppe d by 85% whenT; increases to 5 s. It iso bvious that the QoSr equi rementsca nnot he guaranteed when wec hoose a large Te •
Wec onsider not only thega ins of signali ng cos t but alsothe loss of capacity. Thus,we need to find an optim al Tcto balan ce thes ignaling cost gains and capacity loss. Theproactiveso lution needs to guaranteeth e performa nce o f taxis,especially when theya rc undert heh igh mob ility. Let e = It.Under the high mobility, i.e., v = :18.24 m/s . theo ptima l T;is 3 s. which is the default in these quel as show ni n Fig. 5.
( 18)
(2 1)
(2 0 )
(22)
c- < 1 - 6.C r c q
# of !lando \"cr fa ilures# of handovers
V. N UMERICAL R ESULTS
c.,. ~ E [log, (1 + S I ~ R ) ]
= Iff (SI:\ R ~ 2' - 1)<LT.
HFR ~
Handovcr failure happens when
The h and ovc r failure occurs when the usere qui pment docsnot have sufficient capaci ty o f thec urrent serving cel ls.Le tC and Creq = wCsy s deno te the receivedca paci tyfro mt hecurre nt virtua l cel l and the req uired capacity fora successf ulhandover, respectively. w E (S, 11is the proportion of CrCQ inthea verage system capac ity Csys , which ca n he calculated as
s.: ~ (> v ~ ) GJ (1- . R, ~" Jx (4 ToF_Switch + 1:3P gNB + 2 P SD :-J - Controll cr)'
(19)
s"'" ~ UJ (>"7) GJ (1- ' R2 ~" Jx (4T oF_Switeh + 8 P g :-JB + : U~ <; D N - C o ll t ro ll " r) .
Theo ngo ing activation list at two adjace nt T; may notchange. 1]" 0 and Tre" are the maximal numbers o f handovc rs.Thus, the handove r signaling overhead Spro and Sre" arc alsothe upper limit o f the signal ing overhead.
In thissec tion,o urp roposed proact ive mobility manageme ntsolutioni sc ompared with the reactiveon e, which is the base-line. The reso urcea lloca tion scheme is iat . Other simulationpara meters arcs hown in Table I.

+- R ea~ ti ve
0 . 15
b\ .... I'n""'uve
" ,:::: 0I .
- 0 .05 - • . __
o0. 1 0 .3 0 .5 0 .7 0 .9,
rig. 7: HrR
• Reac,iveiip,..""'live
u L..- p t 1'2 1'3 1':---\ l"h ilily pallern'"Tc (s)
;
rig. 5: The optimal t;
tll;
0 4
"';)2
"
o 0 2
• • • • -<J,01 mi'
- . _10,93 'v,-+- . =-'''-14 ..'.
101 5r; (s)
r ig. 4: Capacity Cvs T;
accuracy decreases when taxis make more turns, thus result ingin the performanced egradation in the proactiveso lution.Nevertheless. under different mobilityp atterns, thes ignalingcost can be efficiently reducedi n the proactive approach. Thismanifests the robustnesso f the proposed solution.
2) HFR: ri g. 7s howsth e relationship between HrR andthe pre-defined capacityth reshold 1 - .5 . A small .5 indicatesthat the current capacity should he largee nought o guaranteea successful handover. Thus, with the increase of 6, therequirement relaxes and thus HrR decreases. The proactivesolution takes advantage of trajectory predict ion in advance,thus leading to a lower HFR whichi s reduced by 2 f'!f).In addition,pr edict ion deviation in the proposed proactivesolution also results in al owerc apacity at certain placesespecially whent axisc hange their direction sharply. However,thetw oso lutionsperf orm similarly with the di fference ofonly 0.19%. The proposedso lutionpro videsa n acceptableHrR while bringingga insin the handovcrd elaya nd signalingoverhead.
VI. C ONC LUS ION
UDN has been a promising direction ofn etworki nfrastruc-ture densificationin the next-generation mobile communica-tion system.H owever, the ultra-dense deployment of gNHsbrings a hugec hallengei nm obility management, especiallyforv ehicles. In this paper, we proposed a proactive mobilitymanagementso lution based onth e virtual cell technique. TheSDN-enabled controllerpro actively measures the quality ofgNHs assisted by the trajectory prediction with a data-dr ivenapproach. The corresponding signaling procedure is designedto support the proposed proactive management. Simulationresultss howed that the proposedso lution can greatly de-creasethe handovcrdel aya ndha ndover signaling cost whencompared witht he reactive approach. In the future work,wewill furtherco nsider improving theacc uracy of the trajectoryprediction.
AC K NOW LED GHIE NT
This work iss upportedby the National Science TechnologyMajor Project of theM inistry of Sciencea ndT echnologyof China (Grant No. 20 I8ZXQ300 1029), NSERC, CFI, andHCKDE Wea re grateful to SycdaM ahfuza Begumf ortheprediction model analyses.
R EFE RE NC ES
[ I] S. Chen. F. Qin. H. Hu, X. Li. and Z. C hen. "Use r-centric uhra-.<lenscnetwork> for 5G: cnancng cc merboooro gjcs. and direc uo ns,' IEEEWin>less COI/!/lUmicalions. vol. 23, no. 2. PI'. 111- 115. 20 16,
[21 B. Yang, X. Yang, X. Ge. and Q. Li. "Cove ragea nd handover analY'isof ultra -de nse millimet er-wave netwo rks with control and user pra ncsepa ration archucct ure,' IEEE Access, vol. 6. PI'. 54 739- 54 750,20 18.
[31 J. Kim, H. Lee. and S. Clltmg, " Virtual cell beamfonning in coope rativene two rk s," IEEE Journal Oil Selec ted A n>as in CcmunUl,icOlio1U, vor. 32,no. 6,1'1'.1 126- 1138. June 20 14.
[41 T. D. Assefa. R. Hoq ue. E. Tragos. and X. Dimaropouk» . "SDN,ba'Cdlocal mobi lity rnanagerucnt with X2-interface in temrocetlnctworks," inI' fO{'. IH:.E CAMAD , 20 17. PI'. 1-6.
[51 Z. Za idi. V. Fridcrikos . Z. Yousaf S. Fletche r. M. Dohlcr. and H.Agh -va mi. " Will SDN he pan of SGT' IEEE CommunicOlio1U Sun'eys &Tutorials. vel. 20. no. 4. PI'. 3220-3258, 20 18.
[61 N. Meng. H. Zh,lllg, and H. Lu." Virtual cell-based mobility enhance -ment and performance evaluation in ultra-de nse netW\lrk>: ' in Prot:.IEEE WCNc. 2016, ro. 1-6.
171 R. Balakrisbmm and L F. Akyildiz.. " Localmobi litya nchoringfor se am-Ie" handover in coord inated , mall ce lh:' in Proc. Jf.F f : GUJHf COM.2013. PI'. 4489-+-t94,
[81S. Costanzo. R. Shrivastava. D.Xe nakis K. Sarndanb, D. Grace, andL. Merdko, . "An SDN-based virtual ce ll frdmewo rk for enhancing theQoE in TD·LTEp ico cells." in Pmf'. QoM EX. 2015 . PI'. 1-6.
[91 K. Sa mda ms. R. Sbrivastava. A. Prasad. D. Gl<lCC, and X. Costa-Perez.', D-LTE virtual celh: an SON architecture for u'er- cen tric multi-eN Bela' lic resource ma nagement." Compll/t'f Communication .I'. vot. 83. PI'.1- 15. 2016.
IlOl M. Joud . M.Garc a-Loza no. and S. Ruil . "User speci fic cell c1u'leri ngto Impro ve mobilit y rohu, me" in 5G ultra -de nse cellular networ ks," inI' fO{'. WONS. 20 18, PI'. 45- 50.
III I T. Sahin. M. Klugc1.C. Zhou. and W. Kellerer. "Virtual cells for 5G V2Xco mmuntcanons." IEEE Commll1,icOlio1U Stalldard.' M aga ~ i n e . vol. 2,no. 1. PI'. 22-28. 2018.
[121 C. Son g, Z. Q u. N. Blumm. and A.-L. Barabasi. "Limit, of predicta bilityin human mllb ility:' Science. vot. 327. no. 5968, PI" 10 IK----1021, 20 10.
[ l J] Q. Liu. G. Chuai. W. Gao. and K. Zhang, "FU Zl Y logic-based virtua lcell de-ign in ultra -dense network s,' £ URASII ' Journal on WirelessCommunication .1 and Nem·orkin;l. vot. 20 18. no. I. p. 87. 20 111.
[ I4J A. La pidoth and S.S hamai."F ading channels: how perfectneed"pe rfectsidei nformation" be?" in I' fO{'. ll-:n: ITCW. 1999. PI'. 36-38.
1151 R. Hug, S. Heckcr, W. Hlibner, and M. Aren,. "Particle-based pede,trianpath prediction using LST r..I-MDL models,"i n I' fO{'. ITSc. 2018. PI'.268-1--2691.
1161 A. ne Bribi" o n. E. Simon, A. Auvolat, P. Vincent, and Y. Hengio."Arnficial ncure j nctworks appliedto tax i des tination predict ion: ' arXil'preprintar Xil':1508.0002J. 2015.
1171 F. V. Haumann and I. G. Niemc gL'Crs. "An evaluation of locat iun man-agerncru proced ures," in Pmf'eeding.1 of 1994 3rd IEEE lmernationalCoef on Universal l'ersrmal Commumcauons. SCI'. 1994. PI'. 359-364.
1181 A. L. Aliyu. P. Bull. and A. Abdallah. " Per formance impl icat iun andanalysh o ft he O pcnl-lo w SUN prot oco l." in Pmf'. WMNA. 20l7. PI'.39 1-396.
Related Documents