Tarnowskie Góry 2011 Praca na konkurs Praca na konkurs Stypendium z Wyboru Stypendium z Wyboru „ „ Podwójny fakultet, Podwójny fakultet, gwarancją lepszego gwarancją lepszego sukcesu i samopoczucia” sukcesu i samopoczucia” Autor: mgr inż. Wojciech Autor: mgr inż. Wojciech Zub Zub

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Tarnowskie Góry 2011
Praca na konkursPraca na konkurs
Stypendium z Wyboru Stypendium z Wyboru
„„Podwójny fakultet, Podwójny fakultet, gwarancją lepszego sukcesu gwarancją lepszego sukcesu
i samopoczucia”i samopoczucia”
Autor: mgr inż. Wojciech ZubAutor: mgr inż. Wojciech Zub

AutoprezentacjaAutoprezentacja
2/18
Witam
Chciałbym najpierw powiedzieć coś o sobie. Urodziłem się w Katowicach, mieszkałem do 6 roku w Gliwicach, i do dzisiaj mieszkam w Tarnowskich Górach.
Jestem absolwentem Szkoły Podstawowej nr. 12 w Tarnowskich Górach, gdzie zdobywałem pierwszą wiedzę, później dostałem się do II LO. im. St, Staszica w Tarnowskich Górach, które zakończyłem bardzo dobrze zdaną maturą z matematyki, i trochę gorzej z jezyka polskiego i matematyki (wynik dobry). Jednakże to tylko wstęp co mnie spotkało na studiach…

Studia skrót pracy dyplomowej p.t. Studia skrót pracy dyplomowej p.t. „Aktywna regulacja drgań w układach mechanicznych”+ „Aktywna regulacja drgań w układach mechanicznych”+
komentarzkomentarz
Dobór sprzężenia zwrotnego występującego w pętli regulacji
Dobór regulatora mającego sterować układem mechanicznym o jednym i dwóch stopniach swobody
Wyznaczenie odpowiednich parametrów regulacji z uwzględnieniem rezerwy stabilności δ
Analiza przebiegu wyznaczonych charakterystyk amplitudowo-częstościowych
Analiza przebiegu wyznaczonych charakterystyk czasowych
3/18
Gdy, dostałem temat pracy od promotora (dr inż. Tomasz Dzitkowski), nie wiedziałem jak się do tego zabrać, co mam
przeczytać, co zrobić, więc udałem się do biblioteki, a póżniej na ksero…

Studia (praca dyplomowa) p.t. Studia (praca dyplomowa) p.t. „Aktywna regulacja drgań w układach mechanicznych”+ „Aktywna regulacja drgań w układach mechanicznych”+
komentarzkomentarz
Model aktywnego eliminatora drgań (układ o 1 stopniu
swobody) oraz schemat blokowy układu regulacji
4/18
Po wielu nieprzespanych nocach w pierwszym miesiącu od otrzymania tematu pracy, w końcu mnie olśniło, poskładałem
wszystkie myśli i udałem się do promotora, po jednej nieudanej wcześniej wizycie, co okazało się pierwszym
sukcesem, ale nie do końca doskonałym…

Charakterystyka czasowa bez regulacjiRozkład pierwiastków mianownika na płaszczyźnie
zespolonej
Studia skrót pracy dyplomowej p.t. Studia skrót pracy dyplomowej p.t. „Aktywna regulacja drgań w układach mechanicznych” „Aktywna regulacja drgań w układach mechanicznych”
model mechaniczny o jednym stopniu swobody + model mechaniczny o jednym stopniu swobody + komentarzkomentarz
5/18
Wyliczam transmitancję układu i częstość drgań własnych układu
,
,
mP(t)
k
x
)(tPkxxm
Równanie ruchu układu
[N/m] 1000 ,]kg[ 10 km
Przyjmuję następujące dane
100
1
10
1111
)(
)()(
22
2
sm
ksmkmssP
sXsG [rad/s] 101
m
k
Okazało się, że sposób wykonywania obliczeń jest dobry ,lecz zły jest efekt końcowy
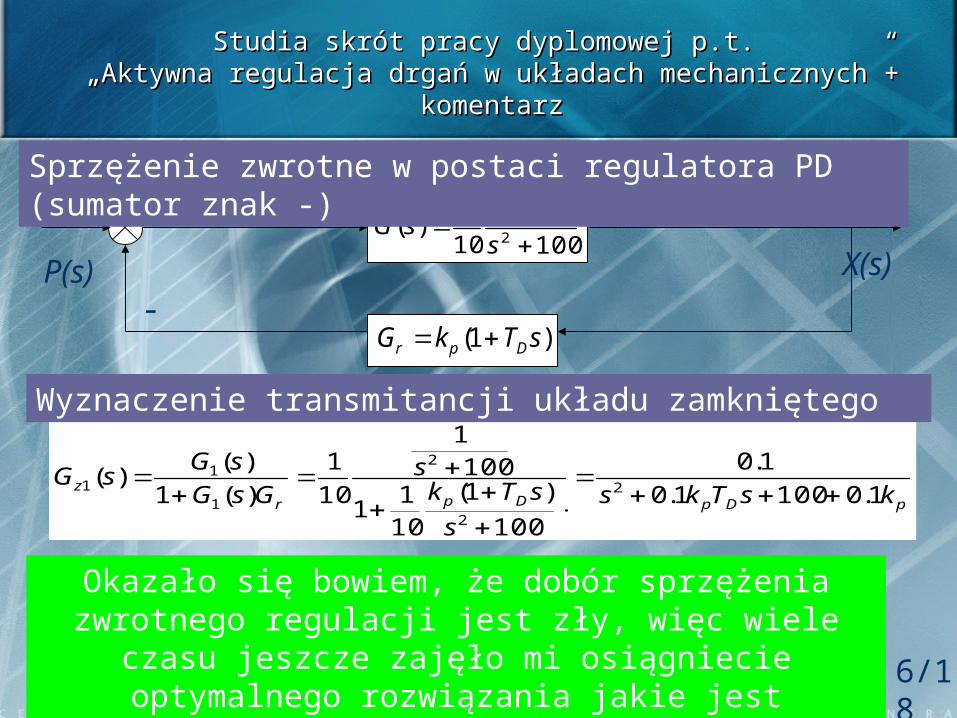
Studia skrót pracy dyplomowej p.t. Studia skrót pracy dyplomowej p.t. „Aktywna regulacja drgań w układach mechanicznych”+ komentarz„Aktywna regulacja drgań w układach mechanicznych”+ komentarz
6/18
100
1
10
1)(
2
ssG
)1( sTkG Dpr
Sprzężenie zwrotne w postaci regulatora PD (sumator znak -)
P(s) X(s)
-
pDpDprz ksTks
s
sTks
GsG
sGsG
1.01001.0
1.0
100
)1(
101
1
1001
10
1
)(1
)()(
2
2
2
1
11
Wyznaczenie transmitancji układu zamkniętego
Okazało się bowiem, że dobór sprzężenia zwrotnego regulacji jest zły, więc wiele czasu jeszcze zajęło mi osiągniecie
optymalnego rozwiązania jakie jest zaprezentowane w tej prezentacji…

Studia skrót pracy dyplomowej p.t. Studia skrót pracy dyplomowej p.t. „Aktywna regulacja drgań w układach mechanicznych” „Aktywna regulacja drgań w układach mechanicznych”
model mechaniczny o jednym stopniu swobody + model mechaniczny o jednym stopniu swobody + komentarzkomentarz
Wyznaczenie parametrów układu zamkniętego kp i TD
1002))(( 211
21111 ssisis
pDp ksTksss 1.01001.01002 2211
2
Porównując współczynniki przy potęgach i uwzględniając współczynnik wzmocnienia wyliczono parametry sterowania:
1
21 2
,10
Dp Tk
7/18
Metodą „prób i błędów” osiągnąłem zamierzony efekt, drgania są aktywnie tłumione, przy pomocy regulatora proporcjonalno
różniczkującego PD…

Wykresy amlitudowo-częstościowe Abr(ω) – bez regulacji, Ar1 (ω) – gdy δ1=0.5, Ar2(ω) – gdy δ1=5
0 5 10 15 200
0.05
0.1
[rad/s]
[m/N
]
Abr ( )
Ar1 ( )
Ar2 ( )
Studia skrót pracy dyplomowej p.t. Studia skrót pracy dyplomowej p.t. „Aktywna regulacja drgań w układach mechanicznych” - „Aktywna regulacja drgań w układach mechanicznych” -
Przebieg charakterystyk czasowych i amplitudowo-częstościowych + komentarz
Charakterystyka czasowa układu gdy δ1=0.5Wykres 3D charakterystyki częstościowej A(ω,δ1), Charakterystyka czasowa układu gdy δ1=5 8/18
A o to efekty końcowe mojej pracy w układzie o jednym stopniu swobody, ale prawdziwe efekty pracy są widoczne w układzie o
dwóch stopniach swobody…

Studia skrót pracy dyplomowej, Studia skrót pracy dyplomowej, aktywne sterowanie układem mechanicznym o dwóch stopniach swobody +
komentarz
[N/m] 300 ,[N/m] 1000
],kg[ 20m ,]kg[ 10
21
21
kk
mm1
m2k1 k2
P(t)
x1 x2
1). Siła przyłożona do masy 1
0)(
)()(
2221122
21111
xkxxkxm
tPxxkxm
Równania ruchu
9/18
Przyjęte dane:
,[rad/s]46370771,121 ,[rad/s]1074,3 2 Wyznaczam częstości drgań własnych i transmitancje układu:
,1500165
65
10
1
)()(
)()(
24
2
21
212
21
12211141
2
212
111
ss
s
mmkk
smm
kmkmkmsm
mkk
s
sP
sXsG
.1500165
5
30000033000200
1000
)(
)()(
24242
21
sssssP
sXsG
Prawdziwym wyzwaniem okazał się układ o dwóch stopniach swobody…

Studia skrót pracy dyplomowej, Studia skrót pracy dyplomowej, aktywne sterowanie układem mechanicznym o dwóch stopniach
10/18Charakterystyki czasowe wyznaczone z transmitancji G1(s) (wykres na
górze) i G2(s) (wykres na dole) przy wymuszeniu P(t)=sin(12.464t)
Była to bardziej skomplikowana i trudniejsza nie tylko na rzut oka zabawa…

Studia skrót pracy dyplomowej, Studia skrót pracy dyplomowej, aktywne sterowanie układem mechanicznym o dwóch stopniach swobody Dobór sprzężenia regulacji i regulatora w układzie i wyznaczenie parametrów
regulacji
11/18
Sprzężenie zwrotne układu z dwoma regulatorami PD
1500165
5)(
2412
sssG
skksTksG vpDpr 22222 )1()(
Transmitancje występujące w schemacie blokowym są równe:
1500165
65
10
1)(
2
2
11
ss
ssG
skksTksG vpDpr 11111 )1()(
2111222
13
114
2
122111
111
55.61500)5.65()1.0165(1.0
5.61.0
)()()()(1
)()(
ppDpDppDp
rrz
kksTkTksksTks
s
sGsGsGsG
sGsG
Wyznaczono dwie transmitancje układu zamkniętego:
2111222
13
114
122111
212
55.61500)5.65()1.0165(1.0
5
)()()()(1
)()(
ppDpDppDp
rrz
kksTkTksksTks
sGsGsGsG
sGsG

Wyznaczenie parametrów układu zamkniętego kp i kv.
Rozróżniono trzy przypadki:
Studia skrót pracy dyplomowej, Studia skrót pracy dyplomowej, aktywne sterowanie układem mechanicznym o dwóch stopniach swobody Wyznaczenie
parametrów regulacji – układ 1
12/18
1500656,9312,19)165(2
))()((2
1122
13
14
22
21111
ssss
sisisI
II
1500344,155656,9
)688,310312,19()4165()(2
))()()((
22
21
22
21
212
2122
21
321
4
11112222
ssss
isisisis
1500344,155688,310)165(2
))()((222
222
32
4
21
22222
ssss
sisis
III
przypadek Rezerwa stabilności Wyniki obliczeń
δ1
[rad/s]
δ2
[rad/s]
A=kv1
[Ns/m]
B=kp1
[N/m]
C=kv2
[Ns/m]
D=kp2
[N/m]
I. 1.00 0.00 2.00000 1.00000 -2.21376 -1.10688
6.00 0.00 12.0000 36.0000 -13.28256 -39.84768
II. 0.00 0.50 1.00000 0.25000 1.80688 0.45172
0.00 1.50 3.00000 2.25000 5.42064 4.06548
III. 1.00 0.50 3.00000 3.25000 -0.406880 -3.25016
6.00 1.50 15.00000 74.25000 -7.86192 -80.9622
Porównując, te równania z równaniem charakterystycznym układu zamkniętego i uwzględniając współczynnik wzmocnienia otrzymano następujące wyniki:

Przebieg i analiza charakterystyk amplitudowo-częstościowych wyznaczonych z transmitancji
Gz1(s)
13/18
I II
III
Wykresy amplitudowo-częstościowe w przypadku I, gdy δ1=1 - wykres Ar1(ω), gdy δ1=6 - wykres Ar2(ω) w porównaniu z wykresem amplitudowo-częstościowym bez regulacji Abr(ω)
Wykresy amplitudowo-częstościowe w przypadku II, gdy δ2=0.5 - wykres Ar1(ω), gdy δ2=1.5 - wykres Ar2(ω) w porównaniu z wykresem amplitudowo częstościowym bez regulacji Abr(ω)
Wykresy amplitudowo-częstościowe w przypadku III, gdy δ1=1 i δ2=0.5 - wykres Ar1(ω), gdy δ1=6 i δ2=1.5 - wykres Ar2(ω) w porównaniu z wykresem amplitudowo częstościowym bez regulacji Abr(ω)

Przebieg i analiza charakterystyk amplitudowo-częstościowych wyznaczonych z transmitancji
Gz1(s)
Wykres 3D amplitudowo-częstościowy w przypadku I z uwzględnieniem rezerwy stabilności δ1, tłumiona ω1
14/18Wykres 3D amplitudowo-częstościowy w przypadku II z uwzględnieniem rezerwy stabilności δ2, tłumiona ω2
Wykres 3D amplitudowo-częstościowy w przypadku III z uwzględnieniem rezerwy stabilności δ1, przyjęto, że δ2 jest stałe i równe 1,5 rad/s
Wykres 3D amplitudowo-częstościowy w przypadku III
z uwzględnieniem rezerwy stabilności δ2, przyjęto, że δ1 jest stałe i równe 1 rad/s

Charakterystyka czasowa w I przypadku, gdy δ1=1(wykres z lewej) δ1=6 (wykresy z prawej), przy wymuszeniu
P(t)=sin(12.4637t)
Charakterystyka czasowa w II przypadku, gdy δ2=0.5 (wykres z lewej) i δ2=1.5 (wykresy z prawej), przy
wymuszeniu P(t)=sin(3.1074t)
Charakterystyka czasowa w przypadku III, gdy δ1=1 i δ2=0.5 (wykres z lewej), i gdy δ1=6 i δ2=1.5( wykresy z
prawej) przy wymuszeniu P(t)=sin(3.1074t)
Przebieg i analiza charakterystyk czasowych wyznaczonych z transmitancji
Gz1(s)
15/18

Przebieg i analiza charakterystyk amplitudowo-częstościowych wyznaczonych z transmitancji
Gz2(s)
16/18
I
III
II

Przebieg i analiza charakterystyk czasowych wyznaczonych z transmitancji
Gz2(s)
17/18
Charakterystyka czasowa w I przypadku, gdy δ1=1(wykres z lewej) δ1=6 (wykres z prawej), przy wymuszeniu
P(t)=sin(12.4637t)
Charakterystyka czasowa w II przypadku, gdy δ2=0.5 (wykres z lewej) i δ2=1.5 (wykresy z prawej), przy
wymuszeniu P(t)=sin(3.1074t)
Charakterystyka czasowa w przypadku III, gdy δ1=1 i δ2=0.5 (wykres z lewej), i gdy δ1=6 i δ2=1.5( wykres z
prawej) przy wymuszeniu P(t)=sin(13,1074t)

Wnioski wynikające z wykonanej pracy
• Czas tworzenia: 6 miesięcy.Czas tworzenia: 6 miesięcy.• Wiele nieprzespanych nocyWiele nieprzespanych nocy• Osiągnięcie bardzo dobrego wyniku … bezcenne…Osiągnięcie bardzo dobrego wyniku … bezcenne…Chcę dalej rozwijać swoje zainteresowania i pasję tworzenia i osiągania sukcesu… Chcę dalej rozwijać swoje zainteresowania i pasję tworzenia i osiągania sukcesu…
dlategodlatego
GŁOSUJ NA MNIE …GŁOSUJ NA MNIE …ponieważ cel i pasja w ponieważ cel i pasja w życiu są najważniejsze.życiu są najważniejsze.
18/18
Related Documents











