President University Erwin Sitompul SMI 2/1 Dr.-Ing. Erwin Sitompul President University Lecture 2 System Modeling and Identification http://zitompul.wordpress.com

President UniversityErwin SitompulSMI 2/1 Dr.-Ing. Erwin Sitompul President University Lecture 2 System Modeling and Identification .
Dec 22, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

President University Erwin Sitompul SMI 2/1
Dr.-Ing. Erwin SitompulPresident University
Lecture 2
System Modeling and Identification
http://zitompul.wordpress.com

President University Erwin Sitompul SMI 2/2
Solution of Homework 1: Interacting Tank-in-Series System
v1
qi
h1
Chapter 2 Examples of Dynamic Mathematical Models
h2
v2
q1
a1 a2
A1 : Cross-sectional area of the first tank [m2]
A2 : Cross-sectional area of the second tank [m2]
h1 : Height of liquid in the first tank [m]
h2 : Height of liquid in the second tank [m]
qo
The process variable are now the heights of liquid in both tanks, h1 and h2.
The mass balance equation for this process yields:
1 1i 1
( )d Ahq q
dt
2 21 o
( )d A hq q
dt

President University Erwin Sitompul SMI 2/3
Solution of Homework 1: Interacting Tank-in-Series System
Chapter 2 Examples of Dynamic Mathematical Models
Assuming ρ, A1, and A2 to be constant, we obtain:
After substitution and rearrangement,
1 1 1q v a 1 2 12 ( )g h h a
o 2 2q v a 2 22gh a
1 i 11 2
1 1
2 ( )dh q a
g h hdt A A
2 1 21 2 2
2 2
2 ( ) 2dh a a
g h h ghdt A A

President University Erwin Sitompul SMI 2/4
Homework 2: Interacting Tank-in-Series SystemChapter 2 Examples of Dynamic Mathematical Models
Build a Matlab-Simulink model for the interacting tank-in-series system and perform a simulation for 200 seconds. Submit the mdl-file and the screenshots of the Matlab-Simulink file and the scope of h1 and h2 as the homework result.Use the following values for the simulation.
a1 = 210–3 m2
a2 = 210–3 m2
A1 = 0.25 m2
A2 = 0.10 m2
g = 9.8 m/s2
qi = 510–3 m3/stsim = 200 s

President University Erwin Sitompul SMI 2/5
Homework 2: Triangular-Prism-Shaped TankChapter 2 Examples of Dynamic Mathematical Models
Build a Matlab-Simulink model for the triangular-prism-shaped tank and perform a simulation for 200 seconds. Submit the mdl-file and the screenshots of the Matlab-Simulink file and the scope of h as the homework result.Use the following values for the simulation.
NEW
a = 210–3 m2
Amax= 0.5 m2
hmax = 0.7 mh0 = 0.05 m (!)g = 9.8 m/s2
qi1 = 510–3 m3/sqi2 = 110–3 m3/stsim = 200 s

President University Erwin Sitompul SMI 2/6
Chapter 2 Examples of Dynamic Mathematical Models
Heat ExchangerConsider a heat exchanger for the heating of liquids as
shown below.Assumptions: • Heat capacity of the tank is small
compare to the heat capacity of the liquid.
• Spatially constant temperature inside the tank as it is ideally mixed.
• Constant incoming liquid flow, constant specific density, and constant specific heat capacity.

President University Erwin Sitompul SMI 2/7
Chapter 2 Examples of Dynamic Mathematical Models
Heat ExchangerConsider a heat exchanger for the heating of liquids as
shown below.
Tj
qTl
qT
Vρ Tcp
Tl : Temperature of liquid at inlet [K]
Tj : Temperature of jacket [K]T : Temperature of liquid inside
and at outlet [K]
q : Liquid volume flow rate [m3/s]V : Volume of liquid inside the
tank [m3]ρ : Liquid specific density [kg/m3]cp : Liquid specific heat capacity
[J/(kgK)]

President University Erwin Sitompul SMI 2/8
Chapter 2 Examples of Dynamic Mathematical Models
Heat ExchangerThe heat balance equation becomes:
l j
( )( )p
p p
d V c Tq c T q c T A T T
dt
A : Heat transfer area of the wall [m2]a : Heat transfer coefficient [W/(m2K)]
Rearranging:
l j( )p p p
dTV c q c T q c A T AT
dt
l jp p
p p p
V c q cdT AT T T
q c A dt q c A q c A
The heat exchanger will be in steady-state if dT/dt = 0, so the steady-state temperature at outlet is:
steady-state l jp
p p
q c AT T T
q c A q c A

President University Erwin Sitompul SMI 2/9
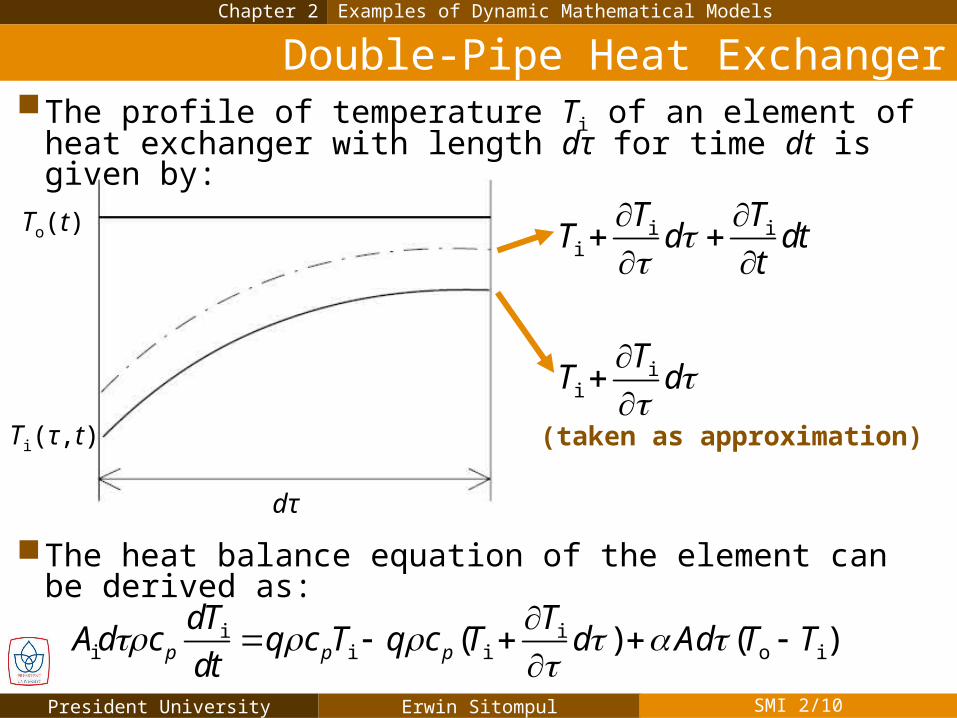
τ : Space variable [m]Ti : Liquid temperature in the
inner tube [K] Ti(τ,t)To : Liquid temperature in the
outer tube [K] To(t)q : Liquid volume flow rate
in the inner tube[m3/s]ρ : Liquid specific density in the
inner tube [kg/m3]cp : Liquid specific heat capacity
[J/(kgK)]A : Heat transfer area per
unit length [m]Ai : Cross-sectional area of
the inner tube [m2]
Chapter 2 Examples of Dynamic Mathematical Models
Double-Pipe Heat Exchanger
L
To,ss
τ dτ
A single-pass, double-pipe steam heat exchanger is shown below. The liquid in the inner tube is heated by condensing steam.
Ti,ss
τ q
President University Erwin Sitompul SMI 2/10
Double-Pipe Heat Exchanger
To(t)
Ti(τ,t)
dτ
ii
TT d
The profile of temperature Ti of an element of heat exchanger with length dτ for time dt is given by:
i ii
T TT d dt
t
(taken as approximation)
i ii i i o i( ) ( )p p p
dT TAd c q c T q c T d Ad T T
dt
The heat balance equation of the element can be derived as:
Chapter 2 Examples of Dynamic Mathematical Models

President University Erwin Sitompul SMI 2/11
Chapter 2 Examples of Dynamic Mathematical Models
Double-Pipe Heat Exchanger
i i io i
p pAd c q cdT TT T
Ad dt A
The equation can be rearrange to give:
The boundary condition is Ti(0,t) and Ti(L,t).
The initial condition is Ti(τ,0).

President University Erwin Sitompul SMI 2/12
Heat Conduction in a Solid Body
L
q(0) q(L)q(x) q(x+dx)
xdx
Consider a metal rod of length L with ideal insulation.Heat is brought in on the left side and withdrawn on the
right side.Changes of heat flows q(0) and q(L) influence the rod
temperature T(x,t).The heat conduction coefficient, density, and specific
heat capacity of the rod are assumed to be constant.
Chapter 2 Examples of Dynamic Mathematical Models

President University Erwin Sitompul SMI 2/13
Heat Conduction in a Solid Body
t : Time variable [s]x : Space variable [m]T : Rod temperature [K] T(x,t)ρ : Rod specific density [kg/m3]A : Cross-sectional area of the rod [m2]cp : Rod specific heat capacity [J/(kgK)]q(x) : Heat flow density at length x [W/m2]q(x+dx) : Heat flow density at length x+dx [W/m2]
L
q(0) q(L)q(x) q(x+dx)
x dx
Chapter 2 Examples of Dynamic Mathematical Models

President University Erwin Sitompul SMI 2/14
Heat Conduction in a Solid Body
The heat balance equation of at a distance x for a length dx and a time dt can be derived as:
L
q(0) q(L)q(x) q(x+dx)
x dx
in out
( )pd mc TQ Q
dt
( ) ( )p
dTAdx c A q x q x dx
dt
( )p
dT dq xAdx c A dx
dt dx ( )
( ) ( )dq x
q x dx q x dxdx
x dxx
( )q x
( )q x dx ( )( )
dq xq x dx
dx
0dxfor
Chapter 2 Examples of Dynamic Mathematical Models

President University Erwin Sitompul SMI 2/15
Heat Conduction in a Solid BodyAccording to Fourier equation:
( )dT
q xdx
λ : Coefficient of thermal conductivity [W/(mK)]
Substituting the Fourier equation into the heat balance equation:
2
2p
dT d TAdx c A dx
dt dx
2
2p
dT d Tcdt dx
2
2p
dT d T
dt c dx
: Heat conductifity factor [m2/s]pc
Chapter 2 Examples of Dynamic Mathematical Models

President University Erwin Sitompul SMI 2/16
The boundary conditions should be given for points at the ends of the rod:
Heat Conduction in a Solid Body
0(0, ) ( )T t T t( , ) ( )LT L t T t
The temperature profile of the rod in steady-state Ts(x) can be dervied when ∂T(x,t)/∂t = 0.
Chapter 2 Examples of Dynamic Mathematical Models
The initial conditions for any position of the rod is:
0( ,0) ( )T x T x
2
2
( )0sd T x
dx ( )sT x ax b
(0)sT b 0,sT( )sT L aL b
0,saL T ,L sT , 0,L s sT T
aL

President University Erwin Sitompul SMI 2/17
Thus, the steady-state temperature at a given position x along the rod is given by:
Chapter 2
Heat Conduction in a Solid Body
, 0,0,( ) L s s
s s
T TT x x T
L
Examples of Dynamic Mathematical Models

President University Erwin Sitompul SMI 2/18
A suitable model for a large class of continuous theoretical processes is a set of ordinary differential equations of the form:
11 1 1 1
( ), ( ), , ( ), ( ), , ( ), ( ), , ( )n m s
dx tf t x t x t u t u t r t r t
dt
State EquationsChapter 2 General Process Models
22 1 1 1
( ), ( ), , ( ), ( ), , ( ), ( ), , ( )n m s
dx tf t x t x t u t u t r t r t
dt
1 1 1
( ), ( ), , ( ), ( ), , ( ), ( ), , ( )n
n n m s
dx tf t x t x t u t u t r t r t
dt
t : Time variable x1,...,xn : State variablesu1,...,um : Manipulated variablesr1,...,rs : Disturbance, nonmanipulable variablesf1,...,fn : Functions

President University Erwin Sitompul SMI 2/19
A model of process measurement can be written as a set of algebraic equations:
1 1 1 1 1( ) , ( ), , ( ), ( ), , ( ), ( ), , ( )n m m mty t g t x t x t u t u t r t r t
Output EquationsChapter 2 General Process Models
2 2 1 1 1( ) , ( ), , ( ), ( ), , ( ), ( ), , ( )n m m mty t g t x t x t u t u t r t r t
1 1 1( ) , ( ), , ( ), ( ), , ( ), ( ), , ( )r r n m m mty t g t x t x t u t u t r t r t
t : Time variable x1,...,xn : State variablesu1,...,um : Manipulated variablesrm1,...,rmt : Disturbance, nonmanipulable variables at outputy1,...,yr : Measurable output variablesg1,...,gr : Functions

President University Erwin Sitompul SMI 2/20
State Equations in Vector FormChapter 2 General Process Models
If the vectors of state variables x, manipulated variables u, disturbance variables r, and the functionsf are defined as:
1 1 1 1
, , ,
n m s n
x u r f
x u r f
x u r f
Then the set of state equatios can be written compactly as:
( ), ( ), ( ), ( )
d tt t t t
dt
xf x u r

President University Erwin Sitompul SMI 2/21
Output Equations in Vector FormChapter 2 General Process Models
If the vectors of output variables y, disturbance variables rm, and vectors of functions g are defined as:
1 1 1
, , m
m
r mt r
y r g
y r g
y r g
Then the set of algebraic output equatios can be written compactly as:
( ) , ( ), ( ), ( )mt t t t ty g x u r
Related Documents











