República Bolivariana de Venezuela. isterio del Poder Popular para la Educación Universitar Politécnica Territorial del Oeste de Sucre “Clodosbald ograma Nacional de Formación en Instrumentación y Contro Diseño de un robot móvil didáctico con brazo 4 GDL, controlado por telemando para la Universidad Politécnica Territorial del Oeste de Sucre “Clodosbaldo Russián”, Cumaná, Estado Sucre, Municipio Sucre, Parroquia Santa Inés. (Hardware). Realizado por: TSU. Leita Dino C.I.: 19.238.278 TSU. Pat ziang Ng C.I.: 19.893.513 TSU. Reyes Cegrantt C.I: 21.094.988 Tutor Técnico: Ing. Zurita, Luís Tutor Metodológico: Lic. Sifontes, Ernesto Cumaná, Mayo 2014

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
República Bolivariana de Venezuela.Ministerio del Poder Popular para la Educación Universitaria.
Universidad Politécnica Territorial del Oeste de Sucre “Clodosbaldo Russián”.Programa Nacional de Formación en Instrumentación y Control.
Diseño de un robot móvil didáctico con brazo 4 GDL, controlado
por telemando para la Universidad Politécnica Territorial
del Oeste de Sucre “Clodosbaldo Russián”, Cumaná,
Estado Sucre, Municipio Sucre, Parroquia Santa Inés. (Hardware).
Realizado por:TSU. Leita Dino C.I.: 19.238.278TSU. Pat ziang Ng C.I.: 19.893.513TSU. Reyes Cegrantt C.I: 21.094.988TSU. Velasquez Elias C.I.: 18.777.025
Tutor Técnico:Ing. Zurita, Luís
Tutor Metodológico:Lic. Sifontes, Ernesto
Cumaná, Mayo 2014
Luego del estudio del problema se presentaron las siguientes interrogantes con respecto al la parte de hardware:
• ¿Como estudiar los aspectos técnicos de un robot móvil didáctico con brazo 5 GDL, controlado por telemando?
• ¿Como estudiar los aspectos técnicos de un robot móvil didáctico con brazo 4 GDL, controlado por telemando?
• ¿Cómo determinar los criterios de diseño del hardware del robot móvil didáctico con brazo 4 GDL, controlado por telemando?
• ¿De qué forma se elabora el manual de usuario para la construcción del hardware del robot móvil didáctico con brazo 4 GDL, controlado por telemando?
CAPITULO IPlanteamiento del
Problema
ObjetivosObjetivo General.• Diseño de un robot móvil didáctico con brazo 4 GDL,
controlado por telemando para la Universidad Politécnica Territorial del Oeste de Sucre “Clodosbaldo Russián”, Cumaná, Estado Sucre, Municipio Sucre, Parroquia Santa Inés.
Objetivos Específicos.
• Estudiar los aspectos técnicos de un robot móvil didáctico con brazo 4GDL, controlado por telemando.
• Determinar los criterios de diseño del hardware del robot móvil didáctico con brazo 4 GDL, controlado por telemando.
• Realizar pruebas de funcionamiento del hardware del robot móvil didáctico con brazo 4 GDL, controlado por telemando.
• Elaborar el manual de usuario para la construcción del hardware del robot móvil didáctico con brazo 4 GDL, controlado por telemando.
JustificaciónLos avances tecnológicos han incidido de manera
positiva en el ámbito educativo; ofreciendo cada vez más herramientas que facilitan el proceso de enseñanza y aprendizaje en sus diferentes niveles. Convirtiéndose de esta manera la tecnología, en un elemento necesario para el desarrollo académico de las y los estudiantes.
La Universidad Politécnica Territorial del Oeste de Sucre “Clodosbaldo Russián”, ubicada en Cumaná, Estado Sucre, Municipio Sucre, Parroquia Santa Inés; cuenta con una serie de equipos que son utilizados para la realización de prácticas que permiten la aplicación y demostración de los conocimientos teóricos adquiridos en las diferentes unidades curriculares; sin embargo, muchos de ellos ya están obsoletos o se han dañado con el tiempo quedando totalmente inoperativos. Un ejemplo de ello es el Robot Industrial que se encuentra en el Laboratorio de Instrumentación; que ha quedado fuera de operación por la falta de piezas que son necesarias para su reparación y que no se han encontrado debido a que este modelo ya esta obsoleto.
Delimitaciones
Este Proyecto se realizará en la Universidad Politécnica Territorial del Oeste de Sucre “Clodosbaldo Russián”, ubicada en el Km. 4 de la carretera Cumaná-Cumanacoa, Parroquia Santa Inés; específicamente para la Unidad Curricular Robótica.
Se estipula la duración de dos Trayectos (Trayecto III – Trayecto IV), equivalentes a 6 trimestres, para la elaboración y ejecución total del Proyecto el cual consiste en la construcción de un robot móvil didáctico con brazo 4GDL, controlado por telemando, la realización de un manual de usuario para su construcción y otro para su manipulación.
Limitaciones
En este proyecto de investigación pueden presentarse diversas limitantes, las cuales influirán en el proceso de obtención, construcción, análisis y determinación de los resultados. Entre ellas se encuentran las siguientes:
• Falta de recursos económicos para llevar a cabo la construcción a mayor escala del robot móvil didáctico con brazo 4GDL, controlado por telemando.
• La no disponibilidad de los componentes necesarios para la construcción.
Relación con el Plan de la Patria 2013-2019• Chávez H. (2012) En su primera directriz establece
“Defender, expandir y consolidar el bien más preciado que hemos reconquistado después de 200 años: la independencia nacional.”.
• Chávez H. (2012) Entre otras de sus directrices propone “Contribuir al desarrollo de una nueva geopolítica internacional en la cual tome cuerpo un mundo multicéntrico y pluripolar que permita lograr el equilibrio del universo y garantizar la paz planetaria.”.
Partiendo de estos enfoques el gobierno se ha encargado de involucrar de una manera directa a la comunidad universitaria con el desarrollo tecnológico del país, impulsando las nuevas tecnologías, y así lograr dar un paso en lo que se refiere a la independencia científico-tecnológica impulsada por algunas de las directrices del Plan de la Patria.
Actualmente el equipo desarrolla un Proyecto Científico-Tecnológico en la Universidad Politécnica Territorial del Oeste de Sucre “Clodosbaldo Russián” que propone el diseño de un robot móvil con brazo controlado por telemando. Con el mismo se pretende el desarrollo de capacidades cognitivas de los estudiantes, centradas en el área de la robótica. Siendo esta una rama de gran relevancia y utilidad en la actualidad y no desarrollada a su máximo nivel en la Nación. Lo que genera no solo el aumento de las capacidades científico-tecnológicas de los nuevos profesionales; sino que también busca la independencia del País a través de la creación de nuevas herramientas tecnológicas creadas con sello venezolano; vinculándolo perfectamente con estas dos directrices del Plan de la Patria.
Relación con el Plan de la Patria 2013-2019
Vinculación con las Líneas de Investigación del PNF en
Instrumentación y Control. Este Proyecto se encuentra vinculado con la
tercera línea de investigación estipulada en el Plan Nacional de Formación en Instrumentación y Control. Dicha línea se encuentra estructurada de la siguiente manera:
• Automatización de Procesos Industriales.• Visión por Computadora.• Inteligencia Artificial.• Telemetría de Señales y Datos.
Estudio de Factibilidad
• Factibilidad Técnica.Para la construcción del robot móvil con brazo
controlado por telemando, es necesario el uso de herramientas altamente calificadas para asegurar el buen funcionamiento del mismo, en la actualidad es probable no conseguir algunas de estas, por lo que se podría optar por la compra de las mismas a través de las diferentes páginas de componentes electrónicos, o por la construcción de las mismas a través de los conocimientos adquiridos, llevándolo a cabo con diferentes dispositivos similares a los necesarios logrando con ello la eficacia en su totalidad del proyecto planteado.
• Factibilidad Económica.Siendo amplio el grupo de trabajo sería factible
decir que se cuenta con los recursos económicos necesarios para la construcción del robot móvil con brazo controlado por telemando, pero la realidad es otra, lamentablemente no se cuentan con los recursos económicos necesarios para la construcción a escala mayor, por lo que se hará un prototipo del mismo.
• Factibilidad Operativa.Considerando que las personas que conforman el grupo
de trabajo son individuos profesionales y lo suficientemente responsables, se podría decir entonces que están lo suficientemente capacitados para trabajar en conjunto, logrando así llevar a cabo la construcción de este proyecto de gran envergadura.
• Factibilidad Psicosocial.Actualmente la institución no cuenta con un robot
funcional con el cual los estudiantes puedan realizar diferentes prácticas de laboratorio. La construcción del mismo generará un gran impacto social, ya que la falta de herramientas necesarias para la instrucción de la robótica es una realidad conocida tanto por el profesorado como por los estudiantes, por lo que se espera que a través de este proyecto se beneficie la comunidad universitaria que hace vida en esta entidad.
Estudio de Factibilidad

CAPITULO IIMarco Teórico
Robótica La robótica es la rama de la tecnología que se
dedica al diseño, construcción, operación, disposición estructural, manufactura y aplicación de los robots esta rama comprende las siguientes areas:
•Mecánica •Electrónica•Informática •Inteligencia artificial •Ingeniería de Control•Física •Algebra•Autómatas programables

Aplicación de la Robótica
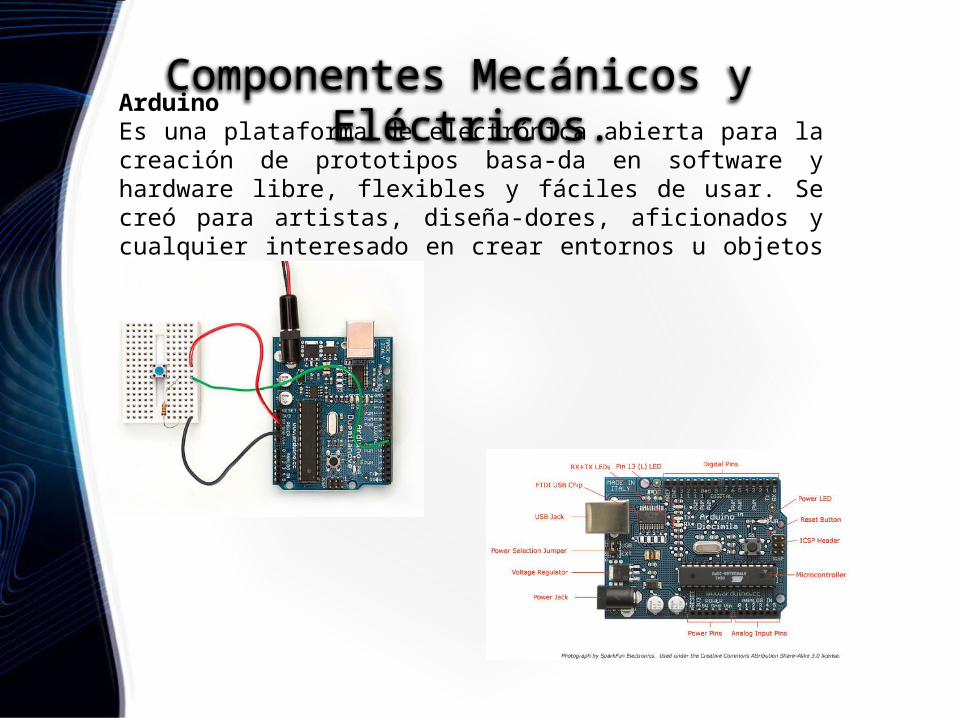
Componentes Mecánicos y Eléctricos.Arduino
Es una plataforma de electrónica abierta para la creación de prototipos basa-da en software y hardware libre, flexibles y fáciles de usar. Se creó para artistas, diseña-dores, aficionados y cualquier interesado en crear entornos u objetos interactivos.
Componentes Mecánicos y Eléctricos.
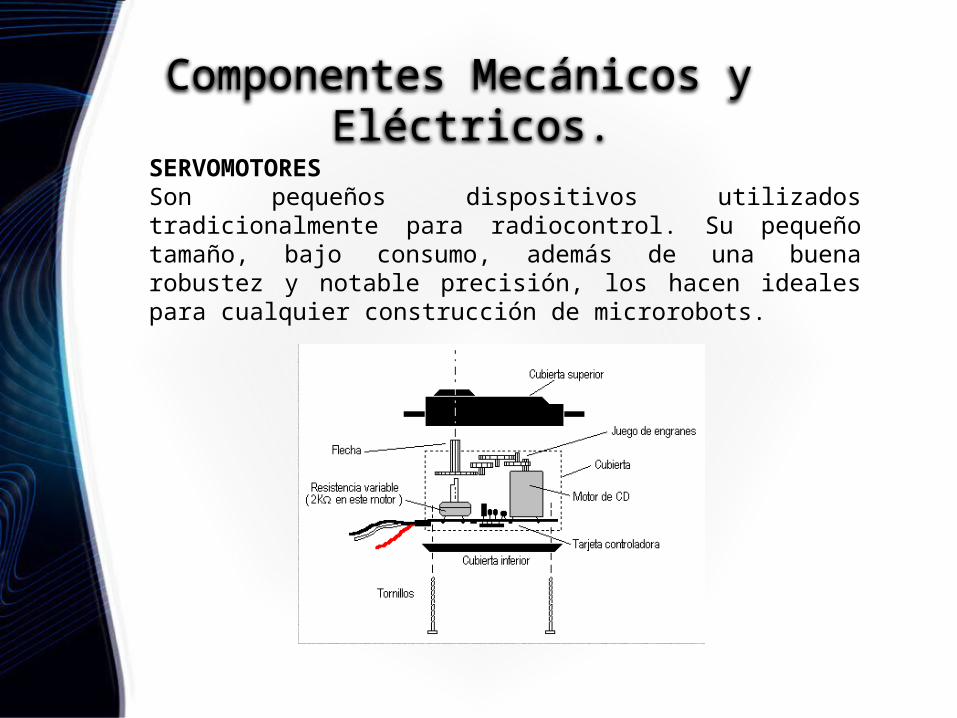
SERVOMOTORESSon pequeños dispositivos utilizados tradicionalmente para radiocontrol. Su pequeño tamaño, bajo consumo, además de una buena robustez y notable precisión, los hacen ideales para cualquier construcción de microrobots.
CAPITULO IIIMarco Metodológico
Fases para el desarrollo del Proyecto.Fase 1. Estudiar los aspectos técnicos de un robot móvil didáctico con brazo 4 GDL, controlado por telemando.• Actividad 1.Investigar las partes básicas y necesarias que
conforman un robot. • Actividad 2.Estudiar los componentes y materiales que se pueden utilizar para la construcción del robot.
Fase 2. Determinar los criterios de diseño del hardware del robot móvil didáctico con brazo 4 GDL, controlado por telemando.• Actividad 1.Definir el aspecto físico y las características que tendrá el robot.• Actividad 2. Determinar los componentes y materiales que se
utilizaran para la construcción del robot.
Marco Metodológico
Fases para el desarrollo del Proyecto.Fase 3. Construir el hardware del robot móvil didáctico con brazo 4 GDL, controlado por telemando.• Actividad 1.Investigar las partes básicas y necesarias que
conforman un robot. • Actividad 2.Ensamblado del robot• Actividad 3.Construir un control manual
Fase 4. Realizar pruebas de funcionamiento del hardware del robot móvil didáctico con brazo 4 GDL, controlado por telemando.• Actividad 1.Anexar el control manual al robot para realizar las pruebas de su funcionamiento• Actividad 2. Revisar y calibrar las partes mecánicas de robot
Marco Metodológico
Fases para el desarrollo del Proyecto.Fase 5. Elaborar el manual de usuario para la construcción del hardware del robot móvil didáctico con brazo 4 GDL, controlado por telemando.• Actividad 1.Realizar un estudio para las posibles prácticas que se
pueden realizar en ellaboratorio• Actividad 2.Realizar el manual de usuario de hardware del robot• Actividad 3.Realizar una guía de prácticas de laboratorio
Related Documents











