EE3302/TE3302 -1- Lab Session III NATIONAL UNIVERSITY OF SINGAPORE EE3302/TE3302 Industrial Control Systems Lab Session III Part A -- Sensors & Signal Conversions 1 Light Sensors 1.1 Objective Describe the characteristics of a photovoltaic cell. 1.2 Equipment - DIGIAC 1750 Transducer and Instrumentation Trainer - 4 mm Connecting leads - Digital Multi-meter 1.3 Characteristics of a Photovoltaic cell Fig 1.1 (1) Connect the circuit as shown in Fig 1.1 with the digital multi-meter (ammeter) in the 2mA range to measure the short circuit current between the Photovoltaic Cell output and the Ground. Fit an opaque box over the Clear Plastic Enclosure to exclude all ambient light.

Practicas Digiac 1750 1
Sep 29, 2015
Electronica
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
EE3302/TE3302 -1- Lab Session III
NATIONAL UNIVERSITY OF SINGAPORE
EE3302/TE3302 Industrial Control Systems
Lab Session III Part A -- Sensors & Signal Conversions
1 Light Sensors
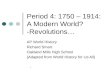
1.1 Objective Describe the characteristics of a photovoltaic cell. 1.2 Equipment - DIGIAC 1750 Transducer and Instrumentation Trainer - 4 mm Connecting leads - Digital Multi-meter 1.3 Characteristics of a Photovoltaic cell
Fig 1.1
(1) Connect the circuit as shown in Fig 1.1 with the digital multi-meter (ammeter) in
the 2mA range to measure the short circuit current between the Photovoltaic Cell output and the Ground. Fit an opaque box over the Clear Plastic Enclosure to exclude all ambient light.
-
EE3302/TE3302 -2- Lab Session III
(2) Switch On the power supply and set the 10k wire wound resistor to minimum for zero output voltage from the power amplifier.
(3) Take readings of Photovoltaic Cell Short Circuit Output Current as indicated on the
digital multi-meter as the lamp voltage is increased in 1V steps. Record the results in Table 1.1.
(4) Switch OFF the power supply, set the multi-meter as a voltmeter to read the Open
Circuit Output Voltage. Switch ON the power supply, repeat the readings and adding the results to Table 1.1.
Table 1.1
Lamp filament Voltage (volts) 0 1 2 3 4 5 6 7 8 9 10
Short Circuit Output Current A A A A A A A A A A AOpen Circuit
Output Voltage V V V V V V V V V V V (5) Plot the graphs of Photovoltaic Cell Short Circuit Output Current and Open Circuit
Output Voltage against Lamp filament voltage in Fig 1.2.
Fig 1.2
Photovoltaic Cell Short Circuit
Output Current (A)
Photovoltaic Cell Open Circuit
Output Voltage (volts)
700650600550500450400350300250200150100
500
0 1 2 3 4 5 6 7 8 9 10
0.700.650.600.550.500.450.400.350.300.250.200.150.100.05
0
Lamp Filament Voltage (volts)
-
EE3302/TE3302 -3- Lab Session III
(6) Switch OFF the power supply. Problems:
1. From your graph, estimate and write down the short circuit current in A when the Lamp filament voltage is 7.5V.
2. Describe the characteristics of the photovoltaic cell.
-
EE3302/TE3302 -4- Lab Session III
2 Rotational Speed or Position Measurements
2.1 Objective
Describe the characteristics of Servo Potentiometer and Tachogenerator. 2.2 Equipment - DIGIAC 1750 Transducer and Instrumentation Trainer - 4 mm Connecting leads
- Digital Multi-meter 2.3 Characteristics of Servo Potentiometer
Fig 2.1
A special positional potentiometer is mounted on the experiment board which has a very large arc of turning, approaching 360. It is called a Servo Potentiometer.
To bring the potentiometer scale into contact with the drive wheel on the shaft, press and release the mounting at the point arrowed in Fig 2.1. The potentiometer can then be turned manually with the shaft using one of the large wheels such as the Hall Effect Sensor Disk. The potentiometer can be turned directly from the dial, manually, if preferred. The 5V input voltages to the Servo Potentiometer are connected internally. (1) Connect a digital multi-meter in the 20V DC range to the output of the
potentiometer as shown in Fig 2.1.
-
EE3302/TE3302 -5- Lab Session III
(2) Turn the potentiometer to find the maximum positive output voltage position. Note the value of this voltage and the angle, as given on the potentiometer dial, in the first column of Table 2.1.
Table 2.1
Control Dial Setting
150 120 90 60 30
360/ 0
330/ -30
300/ -60
270/ -90
240/ -120
210/ -150
Output Volt. (V)
(3) Rotate the dial in steps of 30 clockwise from the maximum voltage position, note the output voltage at each step and record the values in Table 2.1.
(4) At the final step, write down the angle from the dial setting and the value of the
maximum negative voltage setting. (5) From the information recorded in Table 2.1, draw the characteristics of the output
voltage/dial setting of the Servo Potentiometer in Fig 2.2.
Fig 2.2
-180 -150 -120 -90 -60 -30
30 60 90 120 150 180-1
-2
-3
-4
-5
+5
+4
+3
+2
+1
DialSetting
OutputVoltage
-
EE3302/TE3302 -6- Lab Session III
2.4 Characteristics of a Permanent Magnet DC Tacho-Generator
Fig 2.3 shows the construction and electrical circuit arrangement of the DC Permanent Magnet Tacho-Generator fitted to the DIGIAC 1750 Trainer. It consists of a set of coils connected to a commutator which rotate inside a permanent magnet stator.
Fig 2.3 The rotating assembly is called the armature. With the coils rotating, an alternating EMF is generated in them. The commutator converts the resulting AC signal to DC. The magnitude of the generated EMF is proportional to the rate of cutting flux and therefore to the rotational speed. The polarity depends on the direction of cutting flux and therefore on the direction of rotation. The diodes are fitted to limit any voltage spikes that may be generated by the commutation process (i.e. conversion from AC to DC) to a maximum of 12V. The main characteristics of the device are:
Table 2.2
Open circuit voltage (12V to motor) 10.5V Short circuit current (12V to motor) 750mA Output impedance 39 Output noise 200mV p-p
(1) Connect the circuit as shown in Fig 2.4. (2) Set the COUNTER/TIMER controls to COUNT and 1s. Set Amplifier #1 GAIN COARSE control to 10 and GAIN FINE to 0.1. (3) Switch ON the power supply.
-
EE3302/TE3302 -7- Lab Session III
Fig 2.4
(4) Apply an input to the motor and set the shaft speed to 5 rev/sec as indicated by the
counter after pressing the RESET button. Note the output voltages indicated on the Moving Coil Meter and record the values in Table 2.3.
Table 2.3
Shaft Speed
(rev/sec) 5 10 20 30 35
Output Voltage of MCV (V)
(5) Repeat the procedure for other shaft speed settings indicated in Table 2.3. (6) Draw the graph of output voltage against shaft speed in Fig 2.5. (7) Switch OFF the power supply.
-
EE3302/TE3302 -8- Lab Session III
Fig 2.5 Problems:
1. What is the dial setting in degrees for the maximum positive output voltage of Servo Potentiometer?
2. From Fig 2.5, estimate your recorded output voltage from the digital multi-meter
when the shaft speed is 25 rev/sec.
3. Describe the characteristics of the DC tacho-generator.
109876543210 0 5 10 15 20 25 30 35 40
Shaft Speed (rev/sec)
OutputVoltage(volts)
-
EE3302/TE3302 -9- Lab Session III
3 Signal Conversions 3.1 Objective
Describe the characteristics of a voltage to frequency converter (V/F). 3.2 Equipment - DIGIAC 1750 Transducer and Instrumentation Trainer - 4 mm Connecting leads
- Oscilloscope - Digital Multimeter
3.3 Characteristics of a Voltage to Frequency Converter
Fig 3.1
The Timer/Counter is used as a frequency meter to measure the lower output frequencies within its range. The Differentiator and Comparator are pulse shaping circuits to enable the V/F Converter output to trigger the Timer/Counter. An oscilloscope is used to monitor the output waveform and to determine frequencies above the range of the Timer/Counter. (1) Connect the circuit as shown in Fig 3.1. Set the Differentiator control to 1s, the
Counter controls to COUNT and 1s, the Comparator HYSTERESIS to OFF and the 10k 10-turn resistor to zero.
(2) Switch ON the power supply and set the input voltage to 0.2V. Press the RESET
button of the Counter and note the displayed value, which represents the frequency output of the V/F converter. Record the value in Table 3.1.
-
EE3302/TE3302 -10- Lab Session III
Table 3.1
Input Voltage (volts) 0.2 0.4 0.6 0.8 1.0 Output frequency (Hz)
(3) Repeat the procedure for input voltage settings of 0.4, 0.6, 0.8V and 1.0V,
recording the output frequency values in Table 3.1. (4) Continue with further increased values of input voltage if possible when the
Timer/Counter unit is registering the frequency correctly. The unit may operate beyond 1kHz, this is signified by the count going through 999.
When the frequency is too high for the counter, the display will only reach a low value and not pass through 999.
(5) Reset the frequency to 1kHz (1.0V input) and turn your attention to the
oscilloscope. Disconnect the feed to the Differentiator, since the loading effect will degrade the output waveform of the V/F Converter.
(6) Set the Oscilloscope time base to 0.2ms/div and ensure that the variable control is in
its calibrated position. Set the Y amplifier (CH.1) to 2V/div. You should have a
stable trace of 21 negative-going pulses of about 5V (2.5div) amplitude.
(7) Measure the time taken for one cycle along the X axis (for instance, one cycle
covering 2.8div. would be 2.8 x 0.2ms = 0.56ms) and record this in Table 3.2. Take the reciprocal of this to convert to frequency.
(8) Take measurements and calculations at each of the other input voltages listed in
Table 3.2, changing the oscilloscope time base setting as necessary.
Table 3.2
Input volt. (V) 1 2 3 4 5 6 7 8 9 10 Time for
one cycle (ms)
Frequency = 1/T (kHz)
(9) Switch OFF the power supply. Problems:
1. Describe the characteristics of the V/F converter.
2. Calculate the Transfer Ratio of the V/F converter in kHz/V.
-
EE3302/TE3302 -11- Lab Session III
Part B Closed Loop Control Systems Objective Investigate control techniques by applying to a position control system. Equipment - DIGIAC 1750 Transducer and Instrumentation Trainer - 4 mm Connecting leads - Digital Multi-meter
1 Proportional + Integral Control
Fig 1.1 (1) Connect the circuit as shown in Fig 1.1. (Disconnect the integrator and the
differentiator initially). The proportional control section runs across the middle of the diagram. The 10k wirewound resistor is the command input. The function of the Differential Amplifier is to inject a step input voltage later in the investigation. The step voltage is generated by
-
EE3302/TE3302 -12- Lab Session III
Amplifier #2 offset voltage, which is the only purpose for including this amplifier. You will see that it does not need an input for this purpose. Integral control will be added later by connecting the Integrator between the Error Detector (the Instrumentation Amplifier) and the Summing Amplifier. Derivative control will also be added later via the Summing Amplifier. The Inverter between the Differentiator and the Summing Amplifier is to provide negative feedback. The Summing Amplifier combines all of the control systems as required.
Fig 1.2. Sketch of a Schematic Diagram
(2) Press the left hand side of the mounting plate and then release it to engage with the drive shaft.
(3) Set Amplifier #1 GAIN COARSE control to 10 and GAIN FINE to 0.1 to give an
overall gain of 1.0.
(4) Remove the power connection to the Motor. Switch ON the power supply.
(5) Set Amplifier #2 GAIN COARSE control to 100 and GAIN FINE to 1.0 and adjust the OFFSET control for an output of +3V. Return the GAIN COARSE control to 1. The output voltage should fall to near zero volts. Note that since this +3V step is fed into the system via the inverting input of the Differential Amplifier, the actual step injected will be 3V.
-
EE3302/TE3302 -13- Lab Session III
(6) Transfer the Moving Coil Meter to terminal B of the 10k wirewound resistor. Adjust the setting of the 10k resistor control to its central position to give 0V output.
(7) Zero the setting of the Servo Potentiometer dial against the pointer.
(8) Transfer the Moving Coil Meter to the output of the Power Amplifier and adjust
Amplifier #1 OFFSET to give 0V. Restore the Motor power connection.
(9) Rotate the 10k wirewound resistor control slowly over its full travel.
Table 1.1
Amplifier #1 Gain = 1.0 Positive Negative Maximum Dial Reading (degrees)
(10) Return the 10k resistor to its central position. Set Amplifier #1 GAIN FINE to 0.5
(overall gain 5) and repeat the procedure. With this higher setting of the gain control, the Servo Potentiometer should follow the input closely for no load on the drive shaft and it should be possible to obtain the full travel in both directions.
Rotate the input control slowly when nearing the end of the travel or the Servo Potentiometer contact may overshoot and pass the end of the track, causing the drive shaft rotate continuously. If this occurs, return the 10k resistor quickly to its central position.
(11) Note the full range of the Servo Potentiometer against the setting of the 10k
wirewound resistor command input. Record the results in Table 1.2.
Table 1.2 Control Setting 1 2 3 4 5 0V 6 7 8 9 10 Servo-Potentiometer Dial Reading (deg.)
0/ 360
(12) Plot the graph of Dial Reading against Control Setting in Fig 1.3.
-
EE3302/TE3302 -14- Lab Session III
Fig 1.3 (13) Set Amplifier #1 GAIN FINE to 1.0 and use the input command control to return
the Servo Potentiometer dial reading to 0. (14) Move the Servo Potentiometer dial by rotating the Hall effect disc by hand and note
the total range (for example +20 to -10 = 30, it may not be symmetrical) over which the dial can be moved without the system responding and moving the dial back. This value represents a deadband over which the system does not respond. Record the result in Table 1.3.
Table 1.3 Amplifier #1 Gain 10 x 1.0 = 10 10 x 0.5 = 5 10 x 0.1 = 1 Deadband (deg.) (15) Repeat the procedure for Amplifier #1 GAIN FINE settings of 0.5 and 0.1, adding
the results to Table 1.3. (16) Switch off the power supply.
180
150
120
90
60
30
0/360
330
300
270
240
210
180 1 2 3 4 5 6 7 8 9 10
Control Setting
Servo PotentiometerDial Reading
(degrees)
-
EE3302/TE3302 -15- Lab Session III
(17) Remove the power connection to the Motor. Zero the setting of the Servo Potentiometer dial against the pointer. Ensure that the potentiometer is engaged with the drive shaft
(18) Set Amplifier #1 GAIN COARSE control to 10 and GAIN FINE to 0.1 to give an
overall gain of 1.0. (19) Switch on the power supply. (20) Connect the Moving Coil Meter temporarily to terminal B of the 10k resistor and
check the setting to its central position to give 0V output. (21) Transfer the Moving Coil Meter back to the output of the Power Amplifier and
check the adjustment of Amplifier #1 OFFSET to give 0V. (22) Transfer the Moving Coil Meter to the output of Amplifier #2, set the GAIN
COARSE control to 100 and GAIN FINE to 1.0 and check the adjustment of the OFFSET control for an output of +3V. Return the GAIN COARSE control to 1. This control will again be used to introduce a step input.
(23) Restore the power connection to the Motor. With the Integrator time constant set to
1s, press and hold the RESET button, connect the Integrator output lead to the Summing Amplifier input as shown in Fig 1.1 and then release the RESET button.
(24) In the event of continuous rotation of the Motor shaft in the following tests,
immediately return the Amplifier #2 GAIN COARSE switch to 1 and then hold the Integrator RESET button until the shaft becomes stationary.
(25) Note the effect on the output Servo Potentiometer dial reading when a step input is
applied by switching Amplifier #2 GAIN COARSE to 100 and then back to 1. (26) Watch the long-term effect on the Integrator output voltage (on the digital
voltmeter) and on the dial setting and respond to Problem 2. (27) Repeat the procedure with the Amplifier #1 GAIN FINE set to 1.0 (overall gain of
10) and respond to Problem 3. (28) With Amplifier #1 GAIN COARSE set to 10 and GAIN FINE to 1.0, repeat the
procedure with the time constant set to 10s and then 100ms and note the effect. (29) With the time constant switched to 100ms and Amplifier #1 GAIN FINE set to 0.5,
note the effect of displacing the output from its stable position manually by moving the Hall effect disc about 10 on the dial and then releasing it.
(30) Switch OFF the power supply but keep the circuit connected if you can.
-
EE3302/TE3302 -16- Lab Session III
Problems:
1. Discuss the effect of system gain on the deadband.
2. Explain what you have watched in step (26).
3. Discuss the effect of Amplifier #1 gain on system response.
4. Discuss the effect of Integrator time constant on the system response.
5. Explain what you have watched in step (29).
-
EE3302/TE3302 -17- Lab Session III
2 Proportional + Integral + Derivative Control (Optional)
Fig 2.1 (1) Connect the circuit as shown in Fig 2.1, making sure that the outputs of the Integrator
and Inverter are connected to the inputs of the Summing Amplifier. (2) Switch ON the power supply. (3) Press the Integrator RESET button and then reconnect the Integrator output to the
Summing Amplifier input. Set Amplifier #1 GAIN COARSE to 10 and GAIN FINE to 1.0.
(4) Note and record in Table 2.1 the effect of applying a 3V step input to the system with
all the possible combinations of Integrator and Differentiator time constants to note their effect and determine the combination giving optimum response, possibly with one small overshoot.
-
EE3302/TE3302 -18- Lab Session III
Table 2.1
Test Integrator time constantDifferentiator time constant
Continuous running YES/NO
Response time Slow/Medium/Fast
Number of Oscillations
1 1s 2 100ms 3
10s 10ms
4 1s 5 100ms 6
1s 10ms
7 1s 8 100ms 9
100ms 10ms
(5) Switch OFF the power supply.
Problems: 1. Discuss the effect of different parameters of PID controller on the system response.
Related Documents