Positioning Based on GPS Pseudoranges Kai Borre Aalborg University, Denmark Location Technology Tutorial June 9, 2001 Espoo

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Positioning Based on GPS Pseudoranges
Kai Borre
Aalborg University, Denmark
Location Technology Tutorial June 9, 2001 Espoo

Observation Geometry
0
(X,Y, Z)
P1i
P2i
P3i
b = cdti
××
×
The ranges to GPS satellites measured by a receiver have a common bias and,
therefore, are calledpseudoranges:
Pki = ρk
i + c dti + noise.
Location Technology Tutorial June 9, 2001 Espoo

Observation Equation
Pseudorange onL1 frequency; signal travel timeτ ki = ti − tk:
Pki = ρk
i + c dti (t)− c dtk(t − τ ki )+ I k
i + Tki − ek
i . (1)
The geometric distance between satellitek and receiveri is
ρki =
√(Xk − Xi )2+ (Yk − Yi )2+ (Zk − zi )2. Neglecting satellite
clock offset, ionospheric and tropospheric delays we get fork = 1, 2, 3,4
P1i
P2i
P3i
P4i
=
ρ1i + c dti
ρ2i + c dti
ρ3i + c dti
ρ4i + c dti
.
Location Technology Tutorial June 9, 2001 Espoo

The distance between satellitek and receiveri —corrected for Earth
rotation, rotation rate of the Earth isωe—is defined by
ρki = ‖R3(ωeτ
ki )r
k(t − τ ki )geo− ri (t)‖.
The matrixR3 accounts for the rotation by the angleωeτki while the
signal is traveling:
R3(ωeτki ) =
cos(ωeτki ) sin(ωeτ
ki ) 0
− sin(ωeτki ) cos(ωeτ
ki ) 0
0 0 1
.
The rotation is necessary when using vectors referenced to an Earth
centered and Earth fixed system (ECEF).
Location Technology Tutorial June 9, 2001 Espoo
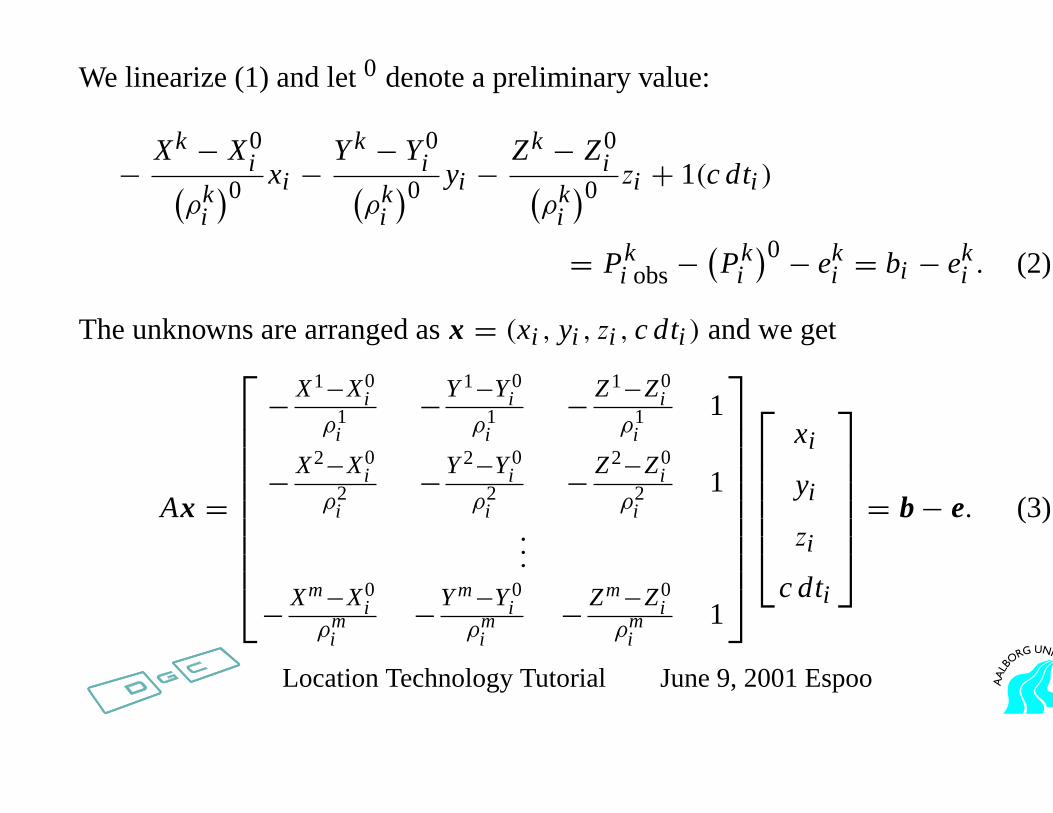
We linearize (1) and let0 denote a preliminary value:
− Xk − X0i(
ρki
)0 xi −Yk − Y0
i(ρk
i
)0 yi −Zk − Z0
i(ρk
i
)0 zi + 1(c dti )
= Pki obs−
(Pk
i)0− ek
i = bi − eki . (2)
The unknowns are arranged asx = (xi , yi , zi , c dti ) and we get
Ax =
− X1−X0i
ρ1i
−Y1−Y0i
ρ1i
− Z1−Z0i
ρ1i
1
− X2−X0i
ρ2i
−Y2−Y0i
ρ2i
− Z2−Z0i
ρ2i
1
...
− Xm−X0i
ρmi
−Ym−Y0i
ρmi
− Zm−Z0i
ρmi
1
xi
yi
zi
c dti
= b− e. (3)
Location Technology Tutorial June 9, 2001 Espoo

Introducing the unit direction vector from receiveri to satellitek
(uk
i
)0 =(
XkECEF− X0
i
ρki
,Yk
ECEF− Y0i
ρki
,Zk
ECEF− Z0i
ρki
)
we can rewrite (3) as
Ax =
−(u1i
)0 1
−(u2i
)0 1...
−(umi
)0 1
x = b− e.
Location Technology Tutorial June 9, 2001 Espoo

The least-squares solution becomes
xi
yi
zi
c dti
= (AT6−1A)−1AT6−1b. (4)
Often one uses6 = σ 2I .
After a few iterations the final receiver coordinates become
Xi = X0i + xi , Yi = Y0
i + yi , andZi = Z0i + zi .
Location Technology Tutorial June 9, 2001 Espoo

A Posteriori Covariance Matrix and DOP
The a posteriori covariance matrix connected with the solution (4) is
6ECEF= (AT6−1A)−1:
6ECEF=
σ2X σXY σX Z
σY X σ2Y σY Z
σZ X σZY σ2Z
σX,c dt
σY,c dt
σZ,c dt
σc dt,X σc dt,Y σc dt,Z σ2c dt
. (5)
The matrixFT connects Cartesian coordinate differences in the local system (at
latitudeφ and longitudeλ) and the ECEF system. The sequence(E, N,U )
Location Technology Tutorial June 9, 2001 Espoo

assures that both the local and the ECEF systems shall be right handed:
FT = R3(π)R2(φ − π
2
)R3(λ− π)
=
0 −1 0
1 0 0
0 0 1
sinφ 0 cosφ
0 1 0
− cosφ 0 sinφ
− cosλ − sinλ 0
sinλ − cosλ 0
0 0 1
=
− sinλ cosλ 0
− sinφ cosλ − sinφ sinλ cosφ
cosφ cosλ cosφ sinλ sinφ
. (6)
The covariance propagation law transforms6ECEF into the covariance matrix
expressed in a local system with coordinates(E, N,U ). The interesting 3 by 3
Location Technology Tutorial June 9, 2001 Espoo

submatrixSof 6ECEF is shown in (5). After the transformationF , the
submatrix becomes
6ENU =
σ 2E σE N σEU
σN E σ 2N σNU
σU E σU N σ 2U
= FTSF. (7)
In practice we meet several forms of thedilution of precision(abbreviated DOP):
Geometric: GDOP=√σ 2
E + σ 2N + σ 2
U + σ 2c dt
σ 20
=√
tr(6ECEF)
σ 20
Location Technology Tutorial June 9, 2001 Espoo

Horizontal: HDOP=√σ 2
E + σ 2N
σ 20
Position: PDOP=√σ 2
E + σ 2N + σ 2
U
σ 20
=√σ 2
X + σ 2Y + σ 2
Z
σ 20
Time: TDOP= σc dt/σ0
Vertical: VDOP= σU/σ0.
Note that all DOP values are dimensionless. They multiply the range
errors to give the position errors (approximately). Furthermore we have
GDOP2 = PDOP2+ TDOP2 = HDOP2+ VDOP2+ TDOP2.
Location Technology Tutorial June 9, 2001 Espoo

Geometric Interpretation of DOP
PDOP can be interpreted as the reciprocal value of the volumeV of a tetrahedron
that is formed by the satellites and the receiver: PDOP= 1V . The best geometric
situation exists when PDOP is minimized. With a full satellite configuration, the
concept of DOP has less impact.
××
××
goodPDOP
××
××
badPDOP
Location Technology Tutorial June 9, 2001 Espoo

SA, Ionospheric and Tropospheric Delays, and Multipath
0 10 20 30 40 50 60 70 80 900
20
40
60
80
100
120
140
Epochs, epoch interval 20 s
Sele
ctiv
e A
vaila
bilit
y SA
[m
]
0 10 20 30 40 50 60 70 80 907
7.5
8
8.5
Epochs, epoch interval 20 s
Iono
sphe
ric
dela
y I
[m]
0 10 20 30 40 50 60 70 80 902.65
2.66
2.67
2.68
2.69
2.7
2.71
2.72
2.73
2.74
Epochs, epoch interval 20 s
Tro
posp
heri
c de
lay
T [m
]
0 10 20 30 40 50 60 70 80 90−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
Epochs, epoch interval 20 s
Mul
tipat
h M
[m
]
Location Technology Tutorial June 9, 2001 Espoo

Orbit Errors
0 50 100 150 200 250−15
−10
−5
0
5
10
15
Time [minutes]
Diff
eren
ce b
etw
een
broa
dcas
t and
pre
cise
eph
emer
ides
Vec
tor
com
pone
nts
(X
, Y, Z
) [m
]N
orm
of
diff
eren
ce v
ecto
r, b
old
line
0 50 100 150 200 250−1
−0.5
0
0.5
1
1.5
2
Time [minutes]
Diff
eren
ce in
rad
ial d
irect
ion
betw
een
broa
dcas
t and
pre
cise
eph
emer
ides
[m]
The left plot shows the difference between precise and broadcast ephemerides.
The precise ephemerides are accurate to within 5 cm. The right plot shows the
length of the difference vector between precise and broadcast ephemerides as
projected onto the line of sight.
Location Technology Tutorial June 9, 2001 Espoo

Modernization of GPSStandard Positioning Service (SPS),σ in meters
Error Source With SA Without SA C/A code on L2 and/or L5 With AIIa
SA 24.0 0.0 0.0 0.0
Ionosphere 7.0 7.0 0.01 0.01
Troposphere 2.0 0.2 0.2 0.2
Orbit and Clock 2.3 2.3 2.3 1.25
Receiver Noise 0.6 0.6 0.6 0.6
Multipath 1.5 1.5 1.5 1.5
User Equivalent RangeError
25.0 7.5 2.8 2.0
HDOP 1.5 1.5 1.5 1.5
Stand-Alone, HorizontalAcc., 95%
75.0 22.5 8.5 6.0
Implementation Date May 2, 2000 2003–2006 2005–2010
Operational Control Segment improvements from 2000
Source: GPS World, September 2000, pp. 36–44
aAccuracy Improvement Initiative
Location Technology Tutorial June 9, 2001 Espoo

Geometry for Differential GPS
• occupy a known station
• compute range corrections
• transmit range corrections to rover
• corrections applied at rover
• improved positioning accuracy
ReferenceStation
RoverReceiver
DifferentialCorrection
××
×
×
Location Technology Tutorial June 9, 2001 Espoo

Differential GPS
Assume the position of receiveri is known. Pki is related toc dti and can
be applied as a range correction toPkj of the rover. Combining the
models ati and j leads to the principle ofdifferential GPS:
(P1
j obs−(P1
j
)0)−(
P1i obs−
(P1
i
)0)
(P2
j obs−(P2
j
)0)−(
P2i obs−
(P2
i
)0)
...(Pm
j obs−(Pm
j
)0)−(
Pmi obs−
(Pm
i
)0)
=
−(u1j
)0 1
−(u2j
)0 1...
−(umj
)0 1
x j
y j
z j
c dti j
.
Herec dti j = c dtj − c dti is the difference of receiver clock offsets.
Location Technology Tutorial June 9, 2001 Espoo

Wide Area DGPS (WADGSP)
WADGPS provides a powerful means for bridging the gap between single site and
high-accuracy positioning in the vicinity of a correction station:
1. Monitor stations at known locations collect GPS pseudoranges from all
satellites in view
2. Pseudoranges and dual-frequency ionospehric delay measurements (if
available) are sent to the master station
3. Master station computes an error correction vector
4. Error correction vector is transmitted to users
5. Users apply error corrections to their measured pseudoranges and collected
ephemeris data to improve navigation accuracy.
Location Technology Tutorial June 9, 2001 Espoo

Internet-based Global DGPS
NASA’s Global GPS Network (GGN) is operated and maintained by JPL.
GGN consists of more then 60 sites in batch mode over the Internet
igscb.jpl.nasa.gov. Software used:
• Real-Time Net Transfer (RTNT)
• Real-Time GIPSY (RTG).
The open Internet is a reliable choice to return GPS data for a state-space
global differential system. User positions accurate to sub-meter level.
gipsy.jpl.nasa.gov/igdg/system/index.html
Location Technology Tutorial June 9, 2001 Espoo

Virtual Reference Station
Data from several reference stations are collected and processed in
real-time using standard software.
Via the Internet the user asks for data from a non-exisiting reference
station at a user specified location. The accuracy is comparable to the one
obtained from a rigorous network solution.
Source: H. van der Marel (1998)Virtual GPS Reference Stations in the Netherlands.
ION GPS-98, pp. 49–58
Location Technology Tutorial June 9, 2001 Espoo

GPS for Precise Time
GPS is the primary system for distribution of Precise Time and Time Interval
(PTTI). The time scales are
• time kept by a satellite clocktk
• GPS timetGPSdefined by the Control Segment on the basis of a set of
atomic standards aboard the satellites and in monitor stations
• UTC (USNO)tUTC the US national standard defined by the US Naval
Observatory
• time kept by a user’s receiver clockti
δtUTC = tGPS− tUTC is currently estimated to be about 10 ns.
Synchronization of clocks by common-view mode.
Location Technology Tutorial June 9, 2001 Espoo

GPS and UMTS
GPS UMTS
Carrier frequency 1.57542 GHz (L1) ≈ 2 GHzChip rate 1.023 Mcps ≈ 4–5 McpsAccess CDMA CDMAPurpose Navigation, position-
ing and timingCommunication, transmission of data
Critical signal parameter Phase (time of arrival) Amplitude (energy)Infrastructure Space based TerrestrialRanging One-way Two-way (Up- and Down Link)Receiver As many SVs as pos-
sibleOnly one base station in principle (’no’ over-lap design)
Propagation Line of sight LoS not critical, usually blocked, multipathpreferred
Positioning 3D 2DRange precision (1σ ) 5 m 20–30 m (IPDL)
Source: Gunter Hein (2000)New Satellite Navigation Systems and Location Services of TerrestrialMobile Communication—GALILEO and UMTS. The 7th GNSS Workshop, November 30–December 2,Seoul, Korea.
Location Technology Tutorial June 9, 2001 Espoo

Recommended Literature
Enge, P. & P. Misra (ed.s) (1999)Proceedings of the IEEE, 87: 3–172
Strang, Gilbert & Kai Borre (1997)Linear Algebra, Geodesy, and GPS.
Wellesley-Cambridge Press
Kaplan, E. D. (ed.) (1996)Understanding GPS Principles and
Applications. Artech House
Misra, Pratap & Per Enge (2001)Global Positioning System. Signals,
Measurements, and Performance. Ganga-Jamuna Press, in preparation
Location Technology Tutorial June 9, 2001 Espoo

Samples of Useful Links on the Internet
GPS in General
www.navcen.uscg.mil
GPS New Signal Structure
www.ima.umn.edu/talks/workshops/8-16-18.2000
GPS Matlab files
kom.auc.dk/˜borre/matlab
OEM boards
www.sirf.com
www.motorola.com/ies/GPS/products/gpsprod.html
www.topconps.com
GPS fleet management
www.thales-navigation.com
Location Technology Tutorial June 9, 2001 Espoo

Galileo about to Move Ahead
Galileo in general
www.galileo-pgm.org
Galileo newsletters
www.genesis-office.org
EU information about Galileo
europa.eu.int/comm/energy transport/en/gal en.html
Source: Christian Tiberius & Peter Joosten (2001)Galileo about to Move Ahead. GIM International,
March 2001, pp. 14–17.
Location Technology Tutorial June 9, 2001 Espoo
Related Documents










