POSITION & ORIENTATION ANALYSIS

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

POSITION &
ORIENTATION ANALYSIS

This lecture continues the discussion on a body that cannot be treated as a single particle but as a combination of a large number of particles. The lecture discusses the finite motion of a rigid body in 3-D space
After this lecture, the student should be able to:•Appreciate the distinction between direction of rotation and axis of rotation•Express the motion of a rigid body in terms of the motion of a point of the body and the rotation of the body
Position & Orientation Analysis

General Motion += Translation Rotation
Summary of Previous Lecture
•Translation: defined by the position between the origins of frame w.r.t. frame {X,Y,Z}. Translation will not change the orientation between the frames:
}ˆ,ˆ,ˆ{ 321 eee
•Orientation: The changes in the orientation of the can be viewed as a result of rotations of frame w.r.t. frame {X, Y, Z}.
}ˆ,ˆ,ˆ{ 321 eee}ˆ,ˆ,ˆ{ 321 eee
)]([)()()()( 0tPQtRtPQtPtQ
R(t) times vector before rotation
=Vector after rotation

Rotation between two configurations
In general, given any arbitrary orthonormal set attached to the rigid body
)()()()()()(
)()()()()()(
111
2022
111
0011
tFtRtRtFtRtF
tFtRtFtFtRtF
The above shows that if two configurations F(t2) and F(t1) are known relative to F(t0), then we can find the configuration of F(t2) relative to F(t1) using R, where )()( 1
12 tFtFR
Therefore:
)()(
)()()()(
12
11
211
2
tRFtF
tFtFtRtRR
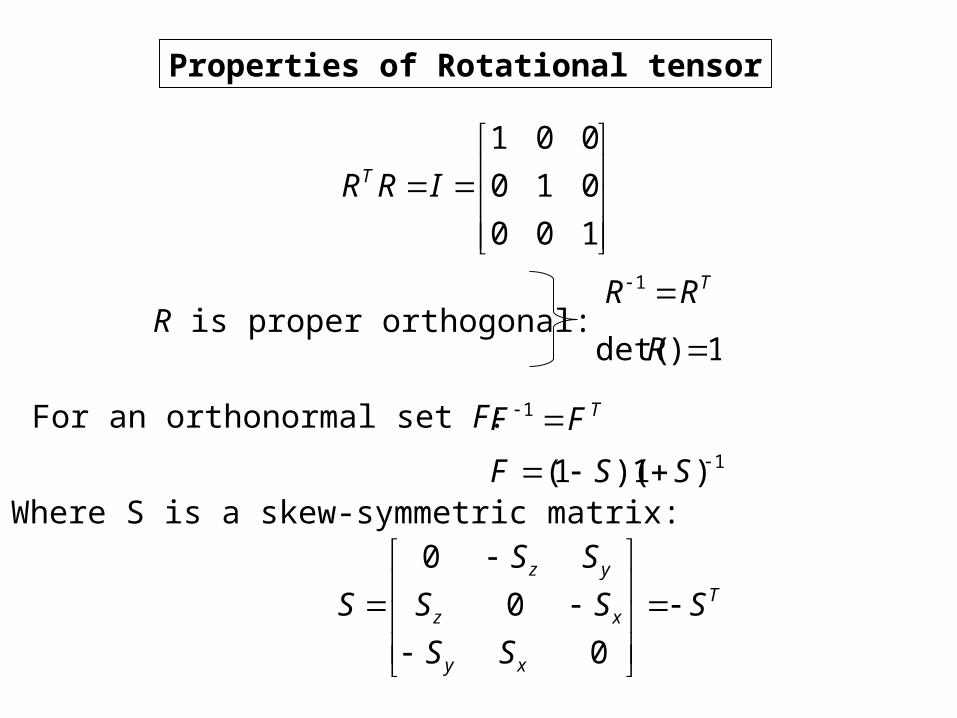
Properties of Rotational tensor
100
010
001
IRRT
TRR 1
1)det( RR is proper orthogonal:
For an orthonormal set F:1
1
)1)(1(
SSF
FF T
T
xy
xz
yz
S
SS
SS
SS
S
0
0
0
Where S is a skew-symmetric matrix:

Pure Rotation
So far, we use R (a matrix) to represent the rotation. Is there another way we can represent the rotation? Consider a clock. To define the rotation of the hand represented by vector “AB”, we need at least 2 things:•the axis of rotation <a> (unit vector) and •the angle of rotation about axis <a>
12
6
39 A
B
“AB(t0)” before rotation
B* “AB(t1)” after rotationP
Axis of rotation <a>
positive
Axis of rotation
(angle of rotation)

Axis of Rotation for Pure Rotation
Notice that regardless of how the clock is orientated, once we know the axis of rotation and the angle of rotation, we can define the orientation of final vector “AB(t1)” if given the initial vector “AB(t0)”. To find the axis of rotation, we need a point P so that
12
6
39 APAxis of rotation <a>
Note: if you rotate AP any angle about AP, you will still end up with AP
APAPR
tAPtAPtAPR
)(
)()()( 010

Let A be an nn matrix. If there exists a and a nonzero n1 vector such that
xxA
x
then is called an eigenvalue of A and is called an eigenvector of A corresponding to the eigenvalue
x
Refresh:
APAPRNow:
R is a 33 matrix and is a 31 vector. Relate =1, AR,
AP
APx
Therefore, is the eigenvector of R corresponding to =1
AP
AP
APa
Unit vector for axis of rotation is
Axis of Rotation for Pure Rotation

Example: Axis of Rotation for Pure Rotation
Determine the direction of rotation given by
36329
4948
33364
491
R
The direction of rotation is the same as the axis of rotation. Given R, we can solve for the eigenvector of R corresponding to =1 to get
AP
Solution:

0
0
0
13329
44048
333645
491
0
0
0
)4936(329
4)499(48
3336)494(
491
0
0
0
100
010
001
1
36329
4948
33364
491
z
y
x
z
y
x
z
y
x
AP
AP
AP
AP
AP
AP
AP
AP
AP
APIR
Example: Axis of Rotation for Pure Rotation

Example: Axis of Rotation for Pure Rotation
013329
044048
0333645
zyx
zyx
zyx
APAPAP
APAPAP
APAPAP
2
09819606516045
0333645
y
z
zyzyx
zyx
APAP
APAPAPAPAP
APAPAP
Multiply 3rd eqn by -5 and add it to 1st eqn to eliminate xAP

Example: Axis of Rotation for Pure Rotation
Divide 2nd eqn by and simplify using the known result:yAP
32
4832
0)2(44048
044048
y
x
y
x
y
z
y
x
AP
AP
AP
AP
APAP
AP
AP
013329
044048
0333645
zyx
zyx
zyx
APAPAP
APAPAP
APAPAP

Example: Axis of Rotation for Pure Rotation
T
yT
zyx
y
x
y
z
APAPAPAPAP
AP
AP
APAP
2132
32
,2
TT
y
y
a
AP
AP
AP
APa
63271
2132
73
ˆ
2132
2132
ˆ22
2
(Remember this axis of rotation. We need it later in another e.g.)

Angle of Rotation for Pure Rotation
For the clock, the hand is always perpendicular to <a>, the axis of rotation. Generally, given a point C on the rigid body, the line “AC” may not be perpendicular to axis <a>. Nevertheless, once the axis of rotation <a> is obtained from R, we can always resolve “AC” into 2 components: the first component ACn is normal and the second component ACp is parallel to the axis <a>:
aaACACACACAC
ACaaACACACAC
aaACAC
pn
nnp
p
ˆˆ
ˆˆ
ˆˆ
A
PAxis of rotation <a>
C
ACp
ACn
Time t0

At time t1, AC has rotated an angle of about axis <a> to AC* :
ACp
A
PAxis of rotation <a>
C
ACn
C*
aaACtACtRACtR
ACtRaaACtACtR
n
n
ˆ)ˆ()()()(
)(ˆ)ˆ()()(
0
0
aaACACACtR pP ˆˆ)(
But
npnp ACtRACtRACACtRtACtRtACAC )()(])[()]()[()(* 01
Therefore
Angle of Rotation for Pure Rotation

In other word, their cross product will be a vector in the direction of axis <a>.
We can find once we determine axis <a>.
nACtR )(ACp
A
P*Axis of rotation <a>
C
ACn
C*
aaACtACtRACtR n ˆ)ˆ()()()( 0
nACtR )(Notice that axis <a> is normal to both and
nAC
Therefore )sin()(2
nnn ACACtRAC
Where is the angle of rotation
Angle of Rotation for Pure Rotation
)sin(baba But
Angle of Rotation for Pure Rotation
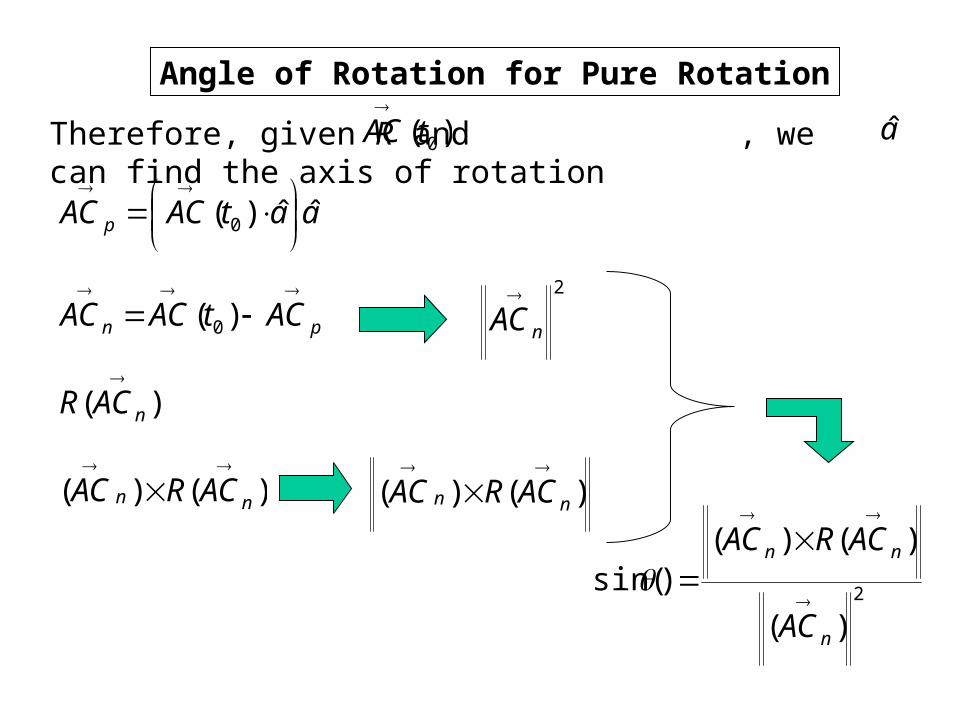
Therefore, given R and , we can find the axis of rotation )( 0tAC
a
aatACACp ˆˆ)( 0
pn ACtACAC )( 0
)(
nACR
)()(
nn ACRAC
2
nAC
)()(
nn ACRAC
2
)(
)()()sin(
n
nn
AC
ACRAC

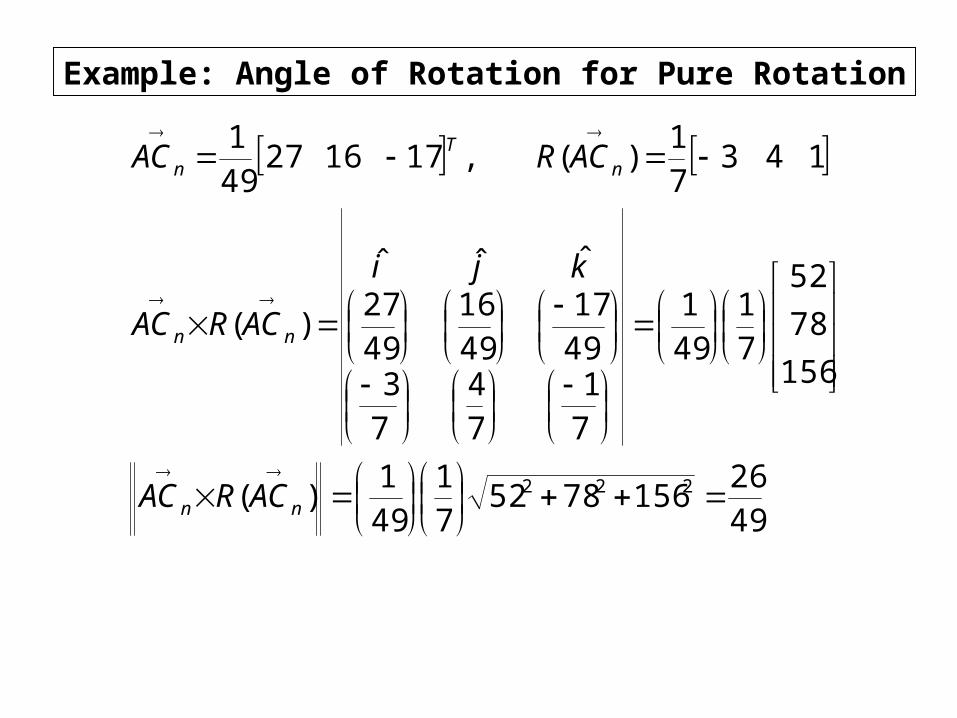
Example: Angle of Rotation for Pure Rotation
Determine the angle of rotation of a point C of the rigid body if
36329
4948
33364
491
111)( 0
R
tAC T
Solution:
The axis of rotation for R has been found from the previous example to be
Ta 63271
ˆ

Example: Angle of Rotation for Pure Rotation
Tn
TTpn
TTp
p
AC
ACACAC
AC
aaaACAC
171627491
6324911
111
6324911
63271
711
ˆ76
73
72
111ˆˆ
TT atAC 63271
ˆ,111)( 0
With
4926
24011274
4917
4916
4927
2
2222
n
n
AC
AC

Example: Angle of Rotation for Pure Rotation
36329
4948
33364
491
,171627491
RAC TnWith
1
4
3
71
343
1372
1029
491
)(
17
16
27
36329
4948
33364
491
491
)(
2
n
n
ACR
ACR
Example: Angle of Rotation for Pure Rotation
4926
156785271
491
)(
156
78
52
71
491
71
74
73
4917
4916
4927
ˆˆˆ
)(
14371
)(,171627491
222
nn
nn
nT
n
ACRAC
kji
ACRAC
ACRAC

Example: Angle of Rotation for Pure Rotation
,2,1,0,22
1
)(
)()()sin( 2
nn
AC
ACRAC
n
nn
49262
nACStory so far ….
4926
)(
nn ACRAC
Therefore

Explicit Expression of R given axis and angle of Rotation
Given R we can obtain the axis of rotation and the angle of rotation. If we are given the axis of rotation and the angle of rotation, then we should be able to derive the rotational matrix R as ),ˆ( aRR
ccaasacaasacaa
sacaaccaasacaa
sacaasacaaccaa
R
zzxzyyzx
xyzyyzyx
yxzzxyxx
)1()1()1(
)1()1()1(
)1()1()1(
Given and kajaiaa zyxˆˆˆˆ
where
)cos(
)sin(
c
s
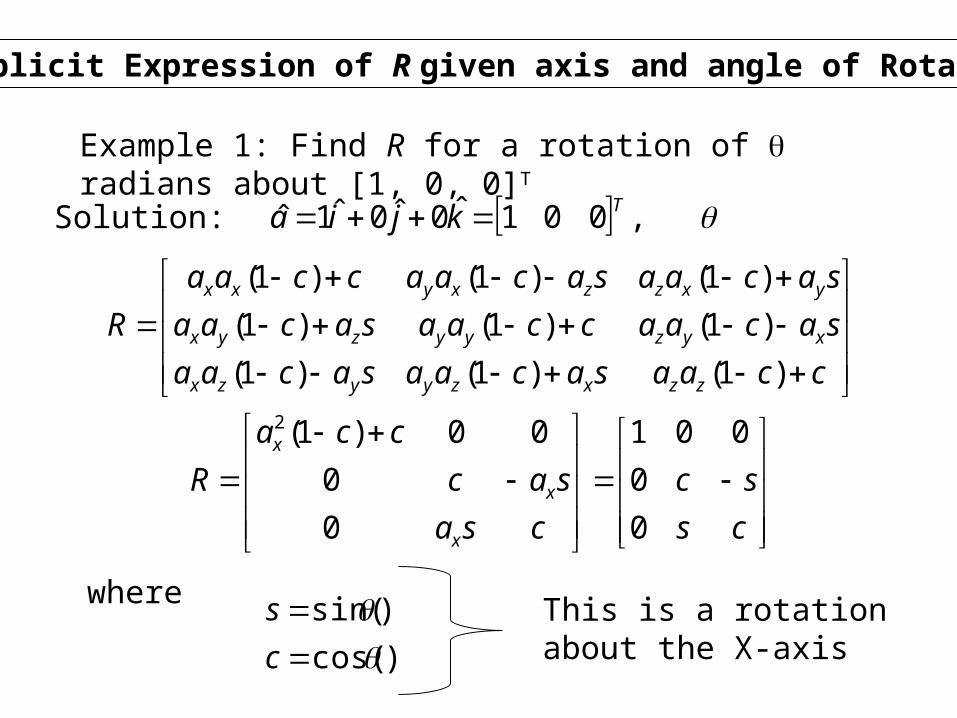
Explicit Expression of R given axis and angle of Rotation
Example 1: Find R for a rotation of radians about [1, 0, 0]T
cs
sc
csa
sac
cca
R
ccaasacaasacaa
sacaaccaasacaa
sacaasacaaccaa
R
x
x
x
zzxzyyzx
xyzyyzyx
yxzzxyxx
0
0
001
0
0
00)1(
)1()1()1(
)1()1()1(
)1()1()1(
2
,001ˆ0ˆ0ˆ1ˆ Tkjia Solution:
where
)cos(
)sin(
c
s This is a rotation about the X-axis

Explicit Expression of R given axis and angle of Rotation
Example 2: Find R for a rotation of radians about [0, 1, 0]T
cs
sc
csa
cca
sac
R
ccaasacaasacaa
sacaaccaasacaa
sacaasacaaccaa
R
y
y
y
zzxzyyzx
xyzyyzyx
yxzzxyxx
0
010
0
0
0)1(0
0
)1()1()1(
)1()1()1(
)1()1()1(
2
,010ˆ0ˆ1ˆ0ˆ Tkjia Solution:
where
)cos(
)sin(
c
s This is a rotation about the Y-axis

Explicit Expression of R given axis and angle of Rotation
Example 3: Find R for a rotation of radians about [0, 0, 1]T
100
0
0
)1(00
0
0
)1()1()1(
)1()1()1(
)1()1()1(
2
cs
sc
cca
csa
sac
R
ccaasacaasacaa
sacaaccaasacaa
sacaasacaaccaa
R
z
z
z
zzxzyyzx
xyzyyzyx
yxzzxyxx
,100ˆ1ˆ0ˆ0ˆ Tkjia Solution:
where
)cos(
)sin(
c
s This is a rotation about the Z-axis

This lecture continues the discussion on a body that cannot be treated as a single particle but as a combination of a large number of particles. The lecture discusses the finite motion of a rigid body in 3-D space
The following were covered:•The distinction between direction of rotation and axis of rotation•The motion of a rigid body in terms of the motion of a point of the body and the rotation of the body
Summary
Related Documents











