Podstawowe sposoby opisu niepewności, wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach sterowania Monitorowanie i Diagnostyka w Systemach Sterowania Monitorowanie i Diagnostyka w Systemach Sterowania (MiDwSS MiDwSS) MiDwSS 2013 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Specjalność: Systemy Sterowania i Wspomagania Decyzji Studia stacjonarne II stopnia: rok I, semestr II Opracowanie: dr inż. Tomasz Rutkowski

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Podstawowe sposoby opisu niepewności,wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach sterowania
Monitorowanie i Diagnostyka w Systemach SterowaniaMonitorowanie i Diagnostyka w Systemach Sterowania((MiDwSSMiDwSS))
MiDwSS 2013
Politechnika Gdańska
Wydział Elektrotechniki i Automatyki
Kierunek: Automatyka i Robotyka
Specjalność: Systemy Sterowania i Wspomagania Decyzji
Studia stacjonarne II stopnia: rok I, semestr II
Opracowanie: dr inż. Tomasz Rutkowski

Plan prezentacjiPlan prezentacji
• Podstawowe sposoby opisu niepewności
• Liniowe i rekursywne postaci obserwatorów Luenbergera Filtr RLS (ang. Recursive Least Squares) Filtr WRLS (ang. Weighted Recursive Least Squares) Filtr Kalmana (ang. Kalman Filter, KF )
• Nieliniowe i rekursywne postaci obserwatorów
MiDwSS 2013 2
• Nieliniowe i rekursywne postaci obserwatorów Filtr RLS i WRLS Rozszerzony Filtr Kalmana (ang. Extended Kalman Filter,
EKF)
• Sformułowanie zadań estymacji punktowej (RLS, WRLS) oraz przedziałowej (ang. set bounded) zmiennych i parametrów obiektów dynamicznych (liniowych/nieliniowych) na ruchomym oknie pomiarowym – zadania optymalizacji

Schemat ideowy układu diagnostykiSchemat ideowy układu diagnostyki
• PRZYKŁADOWE ESTYMATORY
MiDwSS 2013 3
• PRZYKŁADOWE ESTYMATORY
Schemat ideowy układu diagnostykiSchemat ideowy układu diagnostyki
• Estymacja parametrów
Filtr RLS
Filtr WRLS
Rozszerzony Filtr Kalmana
estymatory oparte o metody optymalizacji (rozwiązanie odpowiednich zadań optymalizacji prowadzących do estymatpunktowych lub przedziałowych)
…
MiDwSS 2013 4
…
• Estymacja wyjść/stanu:
Obserwator Laundbergera
Filtr Kalmana, Rozszerzony Filtr Kalmana
estymatory oparte o metody optymalizacji (rozwiązanie odpowiednich zadań optymalizacji prowadzących do estymatpunktowych lub przedziałowych)
…

OB
X Y
Θ
Θ
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja parametrówestymacja parametrów
MiDwSS 2013
Θ
5
OB - Obiekt
X - sygnał wejściowy
Y - sygnał wyjściowy
- parametry obiektuΘ
- estymata parametrów obiektuΘ

OB
OB
Y)
YX
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja wyjść/stanuestymacja wyjść/stanu
MiDwSS 2013 6
OB - Obiekt
X - sygnał wejściowy
Y - sygnał wyjściowy
- estymata sygnału wyjściowego z obiektuY)
YYe)
−= - residuum

OB
X Y
Θ
,Θ
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja parametrów i/lub wyjścia/stanuestymacja parametrów i/lub wyjścia/stanu
,Y)
Y
MiDwSS 2013
Θ
7
OB - Obiekt
X - sygnał wejściowy
Y - sygnał wyjściowy
- parametry obiektuΘ
- estymata parametrów obiektuΘ
- estymata sygnału wyjściowego z obiektuY)
,Y

Estymacja, Estymacja, ObserwatoryObserwatory, Filtry, Filtry
• Estymacja to proces podejmowania decyzji lub wydawania sądu, co do przybliżonej wartości pewnych parametrów czy zmiennych charakteryzujących dany obiekt, na podstawie dostępnej informacji o obiekcie, łącznie z danymi o procesach w nim zachodzących, uporządkowane w danym zbiorze obserwacji.
MiDwSS 2013 8
• Idea obserwatora stanu polega na wykorzystaniu sygnałów wejściowych i wyjściowych systemu dynamicznego do estymacji (śledzenia zmienności) zmiennych stanu.
• Idea filtracji polega na takim przekształceniu sygnału „wejściowego”, przez filtr o odpowiedniej strukturze, aby wynik filtracji jak najmniej różnił się od sygnału „odniesienia” przy założonym kryterium błędu.

• PODSTAWOWE MODELE NIEPEWNOŚCI
MiDwSS 2013 9
• PODSTAWOWE MODELE NIEPEWNOŚCI

Modele niepewnościModele niepewności
• W praktyce każdy zbiór rzeczywistych obserwacji zawiera informacje obarczone błędami, co związane jest to głównie z niepewnością, niedeterministycznym charakterem obiektu.
• Uwzględniając fakt, iż nie zawsze dysponujemy „pełną” informacją pomiarową (chociażby ze względów finansowych)
MiDwSS 2013 10
problem estymacji można zdefiniować jako szacowanie wielkości niemierzonych (nieznanych) parametrów i zmiennych charakteryzujących obiekt na podstawie dostępnych obserwacji (pomiarów) innych parametrów i zmiennych badanego obiektu oraz na bazie modelu matematycznego obiektu opisującego relacje pomiędzy charakteryzującymi go zmiennymi i parametrami.

Modele niepewnościModele niepewności
• Wykorzystanie modeli matematycznych jak i danych pomiarowych, w celu estymacji nieznanych parametrów i zmiennych charakteryzujących obiekt, jednoznacznie wiąże się z niepewnością.
• Źródła niepewności wynikają przede wszystkim z:
MiDwSS 2013 11
błędów struktury modelu matematycznego, niepewnych parametrów modelu matematycznego, błędów pomiarowych obserwowanych wielkości, błędów metod numerycznych i symulacji (dokładność
obliczeń, błędy zaokrągleń itp.), wiedzy a priori oraz heurystyk wykorzystanych przy budowie
modelu systemu (niepewność w tym przypadku jest bardzo trudna do oszacowania).

Modele niepewnościModele niepewności
• Trudno jest wskazać uniwersalną metodę opisu niepewności.
• Przy wyborze jej odpowiedniej reprezentacji należy wziąć pod uwagę między innymi następujące aspekty związane z jej opisem: przyczyny niepewności,
MiDwSS 2013 12
przyczyny niepewności, ilość jak i jakość dostępnej informacji, typ dostępnej informacji, metody przetwarzania dostępnych informacji, itp.

Modele niepewnościModele niepewności
• Wyróżnia się wiele sposobów opisu niepewności, z których najczęściej wykorzystuje się następujące modele:
probabilistyczny model niepewności,
rozmyty model niepewności,
MiDwSS 2013 13
rozmyty model niepewności,
model niepewności wyrażony w postaci zbiorów ograniczonych (ang. set-bounded).

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności:
nieznane wielkości reprezentowane są przez wartości zmiennych losowych wylosowanych ze ściśle określonych zbiorów, niepewność opisana jest przez rozkład prawdopodobieństwa; trajektorie tych wielkości są reprezentowane przez procesy stochastyczne.
MiDwSS 2013 14

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Zmienna losowa:
nxxxX ,,,
21K∈
MiDwSS 2013 15
Prawdopodobieństwo że zmienna losowa X przyjmie wartość ze zbioru [a, b]:
[ ]( )baXP ,∈

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Średnia
∑=
=
n
i
ix
n
x
1
1
MiDwSS 2013 16
Wartość oczekiwana (najbardziej prawdopodobna w sensie statystycznym)
( ) ∑=
∞→
=
n
i
in
xn
XE
1
1lim
( )x
mmXXE ==== µ
inne oznaczenia

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Wariancja
( )( )[ ] ( )[ ] ( )∑=
∞→
−=−=−=
n
i
in
mxn
mXEXEXE
1
222 1limυ
MiDwSS 2013 17
Odchylenie standardowe
υσ =
wartość rozrzutu realizacji wokół wartości średniej
wartość koncentracji realizacji xiw przedziale [m-σ, m+σ]
( )( )[ ] ( ) ( )222
XEXEXEXE −=−=υ

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Dystrybuanta zmiennej losowej X:
( )( )
( )xXPn
xnxF ≤== lim
Przykład: rozkład Gaussa
MiDwSS 2013 18
( ) ( )xXPn
xFn
≤==∞→
lim
Wyraża prawdopodobieństwo tego, że zmienna losowa X przyjmie wartość mniejszą lub równą x
F(x
)

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Gęstość prawdopodobieństwa
( )( )
dx
xdFxf = Przykład: rozkład Gaussa
MiDwSS 2013 19
dx
f(x
) ( )
2
2
1
2
1
−−
=σ
πσ
mx
exf
( )2,~ σmNX

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Rozkład Gaussa – podstawowe właściwości
Jeżeli a to
2)(1
1
+−
−bamy
( )2,~ σmNX baXY += ( )22,~ σabamNY +
MiDwSS 2013 20
Jeżeli i są niezależne, oraz ito
( ))(
2
1
2
1
+−−
=σ
πσ
a
bamy
ea
yf
( )2111
,~ σmNX1
X2
X ( )2222
,~ σmNX
( )( )
( )
( )22
2
1
2
21)(
2
1
2
2
2
1
21
2
1σσ
σσπ
+
+−
−
+
=+
mmx
exxf

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Kowariancja
( ) ( ) ( ) nnyxyxyx ,,,,,,
2211K
MiDwSS 2013 21
( ) ( )yYxXPyxF ≤≤= i ,
( ) ∑=
∞→
==
n
i
in
xx
nXEm
1
1lim ( ) ∑
=
∞→
==
n
i
in
yy
nYEm
1
1lim
( )[ ] ( )∑=
∞→
−=−=
n
i
xin
xxmx
nmXE
1
22 1limυ ( )[ ] ( )∑
=
∞→
−=−=
n
i
yin
yy mxn
mXE
1
22 1limυ

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Kowariancja (cd.)
( )( )[ ] ( )( )∑∞→
−−=−−=
n
yixin
yxxymymx
nmYmXEc
1lim
MiDwSS 2013 22
( )( )[ ] ( )( )∑=
∞→i
yixin
yxxyn 1
yx
xy
xy
c
σσρ =
-gdy zmienne niezależne to: ρxy=0- gdy zmienne zależne to: -1 ≤ ρxy ≤ 1

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Macierz wariacyjno-kowarjacyjna dla n zmiennych losowych
xxxxx
ccυ L
MiDwSS 2013 23
=
nnn
n
n
xxxxx
xxxxx
xxxxx
xx
cc
cc
cc
C
υ
υ
υ
L
MMM
L
L
21
2212
1211

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
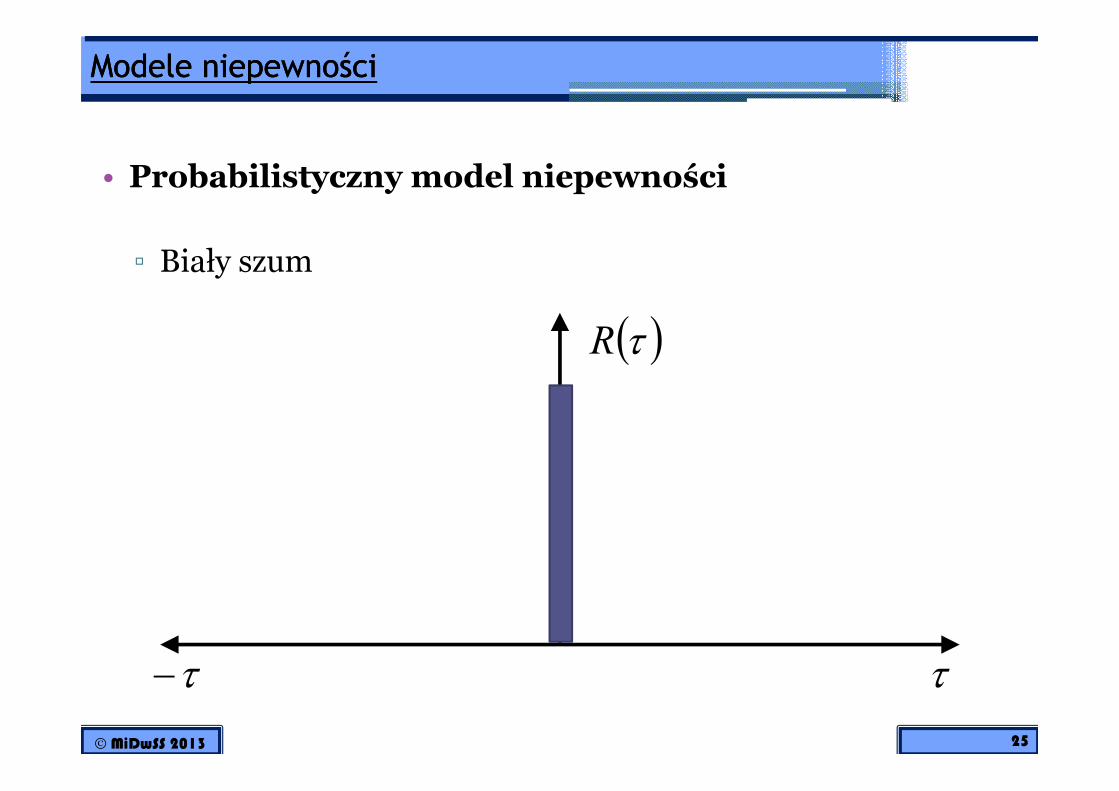
Autokorelacja
( ) ( ) ( )[ ]2121
,, tXtXEttR =
MiDwSS 2013 24
Jeżeli proces jest stacjonarny to:21tt −=τ
( ) ( ) ( )[ ]ττ −= tXtXER ,
Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Biały szum
( )τR
MiDwSS 2013 25
ττ−

Modele niepewnościModele niepewności
• Model niepewności w postaci zbiorów ograniczonych (ang. set-bounded):
niepewne wielkości reprezentowane są w postaci ograniczeń dolnych i górnych, wewnątrz których na pewno znajdują się nieznane wielkości, trajektorie ograniczeń są modelowane przez ograniczone zbiory w przestrzeni trajektorii.
MiDwSS 2013 26
t
y
ym(t)
ym(t)-εm(t)
ym(t)-εm(t)
+
-
)()()( ttytymm
ε+=
)()()( tttmmm
+−
≤≤ εεε
znane a priori
Pomiar:

Modele niepewnościModele niepewności
• Model niepewności w postaci zbiorów ograniczonych (ang. set-bounded):
niepewne wielkości reprezentowane są w postaci ograniczeń dolnych i górnych, wewnątrz których na pewno znajdują się nieznane wielkości, trajektorie ograniczeń są modelowane przez ograniczone zbiory w przestrzeni trajektorii.
MiDwSS 2013 27
Estymaty zmiennej stanu x(t):
t
x xmax(t)
xmin(t)
x(t)
x(t) ^
2
ˆˆmaxminarg:ˆ zxx
zx
−
∈∈ XX
)](),([)(ˆ maxmintxtxt =X
centrum Czybyszewa

Modele niepewnościModele niepewności
• Rozmyty model niepewności:
bazuje na teorii zbiorów rozmytych, niepewne wielkości reprezentowane są przez wartości zmiennych rozmytych, zdefiniowanych bezpośrednio przez funkcję przynależności.
( )eµ
Zbiór rozmyty błędu prędkości eV
MiDwSS 2013 28
( )Veµ
s
m
eV
1
20− 0 20
„bliski zera” „dodatni duży”„ujemny duży”

• ESTYMACJA PARAMETRÓW
MiDwSS 2013 29
• ESTYMACJA PARAMETRÓW

OB
X Y
Θ
Θ
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja parametrówestymacja parametrów
MiDwSS 2013
Θ
30
OB - Obiekt
X - sygnał wejściowy
Y - sygnał wyjściowy
- parametry obiektuΘ
- estymata parametrów obiektuΘ

Schemat ideowy układu estymacjiSchemat ideowy układu estymacji
UrządzeniaUrządzenia
Stan
Sterowanie
Pomiary wyjść
Estymaty
Źródła błędówsystemu
System/
Obiekt
System/
Obiekt
MiDwSS 2013 31
pomiarowepomiarowe
Estymator
Źródła błędów pomiarowych
Estymaty stanu/
parametrów
Pomiary wejśćUrządzenia
pomiarowe
Urządzenia
pomiarowe
Źródła błędów pomiarowych

Podstawowy model pomiarowyPodstawowy model pomiarowy
• Model pomiarowy
eyy~~
+=
wartość prawdziwawartość mierzona
błąd pomiaru
eyy)
+= ˆ~
yye −=~~
yye ˆ~−=
)
MiDwSS 2013 32
eyy)
+= ˆ~
błąd resztkowy (residuum)
wartość mierzona wartość estymowana
e~
- wartość praktycznie nigdy nieznana; mechanizm generujący ten błądzwykle jest aproksymowany przez pewien znany proces(np. szum gaussowski o zerowej wartości średniej i znanej wariancji σ2
lub zbiór ograniczony o granicach znanych a priori )
e
)
- wartość znana w momencie wyznaczenia wartości estymowanej zmiennej
yye ˆ~−=
)

• ESTYMACJA PARAMETRÓW – LRS, WRLS
MiDwSS 2013 33
• ESTYMACJA PARAMETRÓW – LRS, WRLS

Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Idea RLS
Zakładamy, że pewien obiekt (proces) generuje wektor xskładający się z N zmiennych x(1), x(2),…, x(N)
Zakładamy niezmienność procesu Nie możemy ich zmierzyć bezpośrednio ale dysponujemy
aparaturą pomiarową, która umożliwia pomiar M-
MiDwSS 2013 34
aparaturą pomiarową, która umożliwia pomiar M-elementowego wektora z: z(1), z(2),…, z(M), M>N:
gdzie H to macierz układu pomiarowego o wymiarach MxN
v to addytywny szum pomiarowy
Estymatę x oznaczamy jako a odpowiadający jej błąd
vHxz +=
vxHz ˆˆ +=
x v

Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Idea RLS (cd.)
Estymata będzie tym lepsza im mniejszy będzie błąd sumy kwadratów związany z
∑=
==
M
i
i
TvvvJ
1
2ˆˆ
x
v
MiDwSS 2013 35
podstawiając:
J osiąga minimum gdy:
=i 1
( ) 0ˆˆ
=−−=∂
∂xHzH
x
J T
( ) ( )xHzxHzJT
ˆˆ −−=

Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Idea RLS (cd.)
Po kolejnych przekształceniach
zHxHHTT
=ˆ
( ) zHHHxTT
1
ˆ−
=
MiDwSS 2013 36
( ) zHHHxTT
ˆ =
Czy jest to rozwiązanie efektywne ?

Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Przykład rekurencji
Rekurencyjne wyznaczanie średniej: ∑=
=
n
i
inx
n
x
1
1
=
−
+=+= ∑∑−− 11
11111nn
x
n
xxxx
MiDwSS 2013 37
=
−
+=+= ∑∑== 11 1 i
in
i
innx
nn
x
n
x
n
x
n
x
( )111
111
−−−
−+=−
+=nnnnnxx
n
xx
n
n
x
n

Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Standard rekursywnej, adaptacyjnej estymaty parametrów
nowa estymata = jej prognoza + korekta
korekta = wzmocnienie * (pomiar-prognoza pomiaru)
MiDwSS 2013 38
korekta = wzmocnienie * (pomiar-prognoza pomiaru)

Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Wyprowadzenie RLS
Wykorzystując poprzednie wyprowadzenie dla metody najmniejszych kwadratów:
i wprowadzając oznaczenie bieżącego pomiaru k:
( ) zHHHxTT
1
ˆ−
=
MiDwSS 2013 39
i wprowadzając oznaczenie bieżącego pomiaru k:
Otrzymuje się ostatecznie rekursywną postać filtru RLS:
( ) ( ) ( )( ) ( ) ( )kzkHkHkHkxTT
1
ˆ−
=
( ) ( ) ( ) ( ) ( ) ( )[ ]=+−++=+ kxkhkzkKkxkxT
ˆ11ˆ1ˆ
( ) ( ) ( ) ( )[ ]1ˆ1ˆ +−++= kzkzkKkx

Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Wyprowadzenie RLS (cd.)
( ) ( ) ( ) ( ) ( )[ ]1ˆ1ˆ1ˆ +−++=+ kzkzkKkxkx
nowaestymata
jejprognoza
błąd pomiędzy pomiarem a jego prognozą
MiDwSS 2013 40
korekta
( ) ( ) ( )kxkhkzT
ˆ11ˆ +=+
nowy, znanywektor
staraestymata

Estymacja parametrów Estymacja parametrów –– filtr RLS i WRLSfiltr RLS i WRLS
• Algorytm estymacji (dla RLS λ=1, dla WRLS λ<1)1. Inicjalizacja: estymata N-elementowego wektora x na podstawie N
pierwszych pomiarów
( )1,,...,,21
λλλ−−
=NNdiagW
( ) ( ) ( )( ) 1−
⋅⋅= NHWNHNPT
( ) ( ) ( ) ( )NzWNHNPNxT
⋅⋅⋅=ˆ
Nk =
MiDwSS 2013 41
2. Nowy pomiar z(k+1), nowe h(k+1) i nowy szum v(k+1):
3. Modyfikacja wzmocnienia:
Nk =
( ) ( ) ( ) ( )11ˆ11ˆ +++⋅+=+ kvkxkhkzT
( ) ( ) ( ) ( )( ) 1
111−
+⋅⋅++=+ khkPkhkcT
λ
( ) ( ) ( ) ( )111 +⋅+⋅=+ kckhkPkK

Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
4. Predykcja parametru – korekta estymaty wielkości szukanej:
5. Modyfikacja macierzy P:
6. Następna iteracja:
( ) ( ) ( )( ) ( )NPkhkKkPT
⋅+⋅+−Ι=+ 111
1λ
( ) ( ) ( ) ( ) ( ) ( )( )kxkhkzkKkxkxT )
⋅+−+⋅++=+ 111ˆ1ˆ
MiDwSS 2013 42
6. Następna iteracja:
Skok do kroku 2
1+= kk

Estymacja parametrów Estymacja parametrów –– filtr WRLS filtr WRLS (ang. (ang. WeightedWeighted RecursiveRecursive LeastLeast SquaresSquares))
• Idea WRLS
Estymata będzie tym lepsza im mniejszy będzie błąd sumy kwadratów związany z , przy uwzględnieniu diagonalnej macierzy wag W:
∑==
M
ii
TvwvWvJ2
ˆˆ
x
v
MiDwSS 2013 43
podstawiając:
przy czym:
∑=i
ii
1
( ) WzHWHHxTT
1
ˆ−
=
[ ] 0=vE [ ] RvvET=
1−= RW

Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
• Przykładowe zadanie:
Estymacja parametrów modelu matematycznego opisanego równaniem:
( ) ( )∑=
+−=
1
0
)()(n
kvkhknxky
MiDwSS 2013 44
metodami RLS i WRLS, na podstawie znajmości sygnału wejściowego x(n) i wyjściowego y(n) zaszumionego szumem v(n)
Przy czym jego parametry to x=[-0.987; 2,345]
Zaczerpnięty z [1]

Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
MiDwSS 2013 45

Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
Parametry stałe x=[-0.987; 2,345]
2
4
6
8
10
POMIAR
MiDwSS 2013 46
0 200 400 600 800 1000 1200 1400 1600 1800 2000-10
-8
-6
-4
-2
0
k
z(k)

Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
0 200 400 600 800 1000 1200 1400 1600 1800 2000-1
-0.95
-0.9
-0.85
-0.8
-0.75
-0.7
-0.65
-0.6
ESTYMATA h1
h1e(k)
0 200 400 600 800 1000 1200 1400 1600 1800 20002.3
2.35
2.4
2.45
2.5
2.55
2.6
2.65
2.7
2.75
2.8
ESTYMATA h2
h2e(k)
RLS
MiDwSS 2013 47
0 200 400 600 800 1000 1200 1400 1600 1800 20002.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
ESTYMATA h2
k
h2e(k)
0 200 400 600 800 1000 1200 1400 1600 1800 2000
k
0 200 400 600 800 1000 1200 1400 1600 1800 2000
k
0 200 400 600 800 1000 1200 1400 1600 1800 2000-1.15
-1.1
-1.05
-1
-0.95
-0.9
-0.85
-0.8
-0.75
-0.7
ESTYMATA h1
k
h1e(k)
WRLS

Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
2
4
6
8
10
POMIAR
Parametry zmienne x=[±0.987; ±2,345]
MiDwSS 2013 48
0 200 400 600 800 1000 1200 1400 1600 1800 2000-10
-8
-6
-4
-2
0
k
z(k)
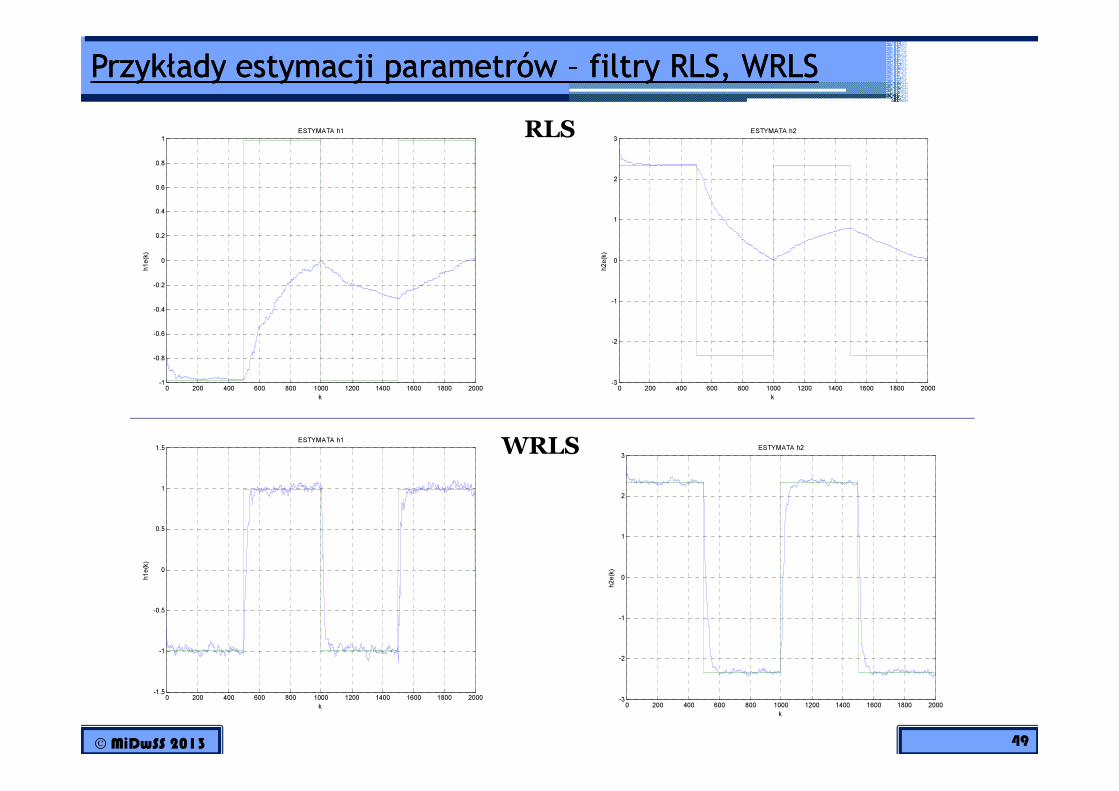
Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
RLS
0 200 400 600 800 1000 1200 1400 1600 1800 2000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
ESTYMATA h1
k
h1e(k)
0 200 400 600 800 1000 1200 1400 1600 1800 2000-3
-2
-1
0
1
2
3
ESTYMATA h2
k
h2e(k)
MiDwSS 2013 49
WRLS
k k
0 200 400 600 800 1000 1200 1400 1600 1800 2000-3
-2
-1
0
1
2
3
ESTYMATA h2
k
h2e(k)
0 200 400 600 800 1000 1200 1400 1600 1800 2000-1.5
-1
-0.5
0
0.5
1
1.5
ESTYMATA h1
k
h1e(k)

Nieliniowe filtry RLS, WRLSNieliniowe filtry RLS, WRLS
Bardziej szczegółowe informacje na temat liniowych i nieliniowych filtrów RLS i WRLS można znaleźć
MiDwSS 2013 50
nieliniowych filtrów RLS i WRLS można znaleźć między innymi w materiałach wykładowych z
przedmiotu: „Modelowanie i Identyfikacja”
(wykłady 3, 4 i 5, sem. I studiów stacjonarnych I stopnia)

• ESTYMACJA WYJŚĆ/STANU – Obserwator Luenbergera
MiDwSS 2013 51
• ESTYMACJA WYJŚĆ/STANU – Obserwator LuenbergeraKalmana, Rozszerzony Filtr Kalamna

OB
OB
Y)
YU
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja wyjść/stanuestymacja wyjść/stanu
MiDwSS 2013 52
OB - Obiekt
U - sygnał wejściowy
Y - sygnał wyjściowy
- estymata sygnału wyjściowego z obiektuY)
YYe)
−=

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea obserwatora Luenbergera
wymaga znajomości wszystkich zmiennych stanu, wymagane są „idealne” czujniki pomiarowe o
nieograniczonym paśmie znane wszystkie parametry systemu (opis w przestrzeni
stanu, macierze A, B, C, D)
MiDwSS 2013 53
stanu, macierze A, B, C, D)
• Obserwator Luenbergera rzędu zredukowanego
Więcej szczegółowych informacji o obserwatorach pełnym i zredukowanym Luenbergera można znaleźć między innymi w materiałach wykładowych z przedmiotu: „Teoria Sterowania”
(sem. I studiów stacjonarnych I stopnia)

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea obserwatora Luenbergera
A, B C
A, B
u(t) x(t) y(t)
( )tx)
Realny system dynamiczny
MiDwSS 2013 54
A, B
Numeryczna kopia systemu
( ) ( ) ( )kBukAxkx +=+1 ( ) ( ) ( )kBukxAkx +=+ ˆ1ˆ
Realny system dynamiczny Numeryczna kopia systemu
Błąd odtworzenia stanu
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )kxAkBukxAkBukAxkxkxkx~
ˆˆ~
=−−+=−=
( ) ( ) ( )0ˆ00~
xxx −=

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea obserwatora Luenbergera
A, B C
A, [B L]
u(t) x(t) y(t)
( )tx)
Realny system dynamiczny
C( )ty
MiDwSS 2013 55
A, [B L]
Numeryczna kopia systemu
( ) ( ) ( ) ( ) ( )( )kxkyLkBukxAkx ˆˆ1ˆ −++=+
Korekta estymaty:
C
Błąd odtworzenia stanu
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )kxLCAkxkyLkBukxAkBukAxkxkxkx ~ˆˆˆ
~−=−−−−+=−=
( ) ( ) ( ) ( )0ˆ00~
xxLCAx −−=

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład zastosowania obserwatora Luenbergera
MiDwSS 2013 56

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład zastosowania obserwatora Luenbergera
40
50
60
70
prawdziwy stan
obserwator L1
obserwator L2
obserwator L3
MiDwSS 2013 57
0 10 20 30 40 50 60 70 80-10
0
10
20
30
40
k
x(k)

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład zastosowania obserwatora Luenbergera
10
20
30
40
odchylenie standardowe
MiDwSS 2013 58
0 10 20 30 40 50 60 70 80-50
-40
-30
-20
-10
0
k
x(k)
odchylenie standardoweszumu pomiarowego0.05, 0.25, 0.5

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (estymacja minimalno-średniokwadratowa,
MMS, Minimum Mean Square)
• Filtr Kalmana stosuje się do estymacji wartości obserwowanych zmiennych, minimalizując błędu estymacji stanu w sensie statystycznym.
• Filtr Kalmana uwzględnia informacje o procesie z dwóch źródeł:
xxx ˆ~
−=
MiDwSS 2013 59
• Filtr Kalmana uwzględnia informacje o procesie z dwóch źródeł: urządzenia pomiarowe (wiedza a posteriori), model systemu (wiedza a priori).
• Filtr Kalmana działa zgodnie ze schematem predyktor-korektor
Rudolph. E. Kalman, "A New Approach to Linear Filtering and Prediction Problems", Trasactions of the ASME: Journal of Basic Engineering,
vol 82, Series D, pp. 35-45, 1960.

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (zagubieni na morzu)
0.12
0.14
0.16
Określenie pozycji na podstawiepomiaru z1 wykonanego w chwili czasu t1:
• średnia: z1
1z
MiDwSS 2013 60Zaczerpnięto z [3]
0 10 20 30 40 50 60 70 80 90 1000
0.02
0.04
0.06
0.08
0.1
• średnia: z1
• odchylenie standardowe: σz1
• najlepsza estymata położenia: (t1) = z1
• wariancja błędu estymaty: σ2y (t1) = σ2
z1
• z1 może być predykcją pozycji dla kolejnej chwili czasu t2
x
x
1zσ

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (zagubieni na morzu)
Ponowne, po krótkiej chwili określeniepozycji x2 na podstawie pomiaru (pomiar dokładniejszy niż poprzednim razem) z2 w chwili czasu t2 ≈ t1:
0.12
0.14
0.161z
2z
MiDwSS 2013 61
razem) z2 w chwili czasu t2 ≈ t1:
• średnia - z2
• odchylenie standardowe - σz2
• konieczna korekcja estymaty położeniadokonanej sekstansem, wyznaczenie - (t2)
• Jak dokonać fuzji informacji z dwóch pomiarów o różnej dokładności?• Założyliśmy rozkład Gaussa
0 10 20 30 40 50 60 70 80 90 1000
0.02
0.04
0.06
0.08
0.1
x
Zaczerpnięto z [3]
2zσ

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (zagubieni na morzu)
Zatem najlepszą estymatą położenia w chwili czasu t2
będzie: (t2) = µx
Z właściwości rozkładu normalnego:
MiDwSS 2013 62
;
Zaczerpnięto z [3]
11)(ˆ ztx =

0.12
0.14
0.16
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (zagubieni na morzu)
Skorygowana pozycja w chwili czasu t2 :
• optymalna estymata położenia: (t2) = µ
• wariancja błędu estymaty : σ2x (t2)
1z
2z
µ
x
MiDwSS 2013
0 10 20 30 40 50 60 70 80 90 1000
0.02
0.04
0.06
0.08
0.1
0.12
63
• wariancja błędu estymaty : σ x (t2) (poprzedni slajd)
Zaczerpnięto z [3]

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana
Działanie zgodnie ze schematem Predykcja-Korekcja
Optymalna estymata = jej prognoza + korekta
MiDwSS 2013 64
Optymalna estymata = jej prognoza + korekta
korekta = wzmocnienie Kalmana * (pomiar - prognoza pomiaru)
Wariancja estymaty = Wariancja prognozy*(1 - wzmocnienie Kalmana)

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (estymacja minimalno-średniokwadratowa,
MMS, Minimum Mean Square)
• Minimalizuje się funkcję jakości w postaci:
( ) ( )[ ]xxxxEJT
ˆˆ −⋅−=
MiDwSS 2013 65
• Rozważa się model:
proces dynamiczny, niestacjonarny
( ) ( ) ( ) ( )( ) ( ) ( )
+++⋅=+
⋅+⋅+⋅=+
111
1
kvkxHkz
kwGkuBkxAkx - model procesu
- model pomiaru
Szczegółowe informacje można znaleźć np. w [2]

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (estymacja MMS)
MiDwSS 2013 66

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (estymacja MMS)
MiDwSS 2013 67

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana
• Błąd estymacji a priori (model):
• Błąd estymacji a posteriori (pomiar):
( ) ( ) ( )k|1kˆ1kk|1k +−+=+ xxe
( ) ( ) ( )1k|1kˆ1k1k|1k ++−+=++ xxe
MiDwSS 2013 68
• Estymata błędu kowariancji a priori:
• Estymata błędu kowariancji a posteriori:
( ) ( ) ( )1k|1kˆ1k1k|1k ++−+=++ xxe
( ) ( ) ( )[ ]k|1kk|1kk|1kP ++=+TeeE
( ) ( ) ( )[ ]1k|1k1k|1k1k|1kP ++++=++TeeE

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalman
• Celem filtru Kalmana jest wyznaczenie estymaty a posteriori jako liniowej kombinacji estymaty a priori
i ważonej różnicy pomiędzy aktualnym pomiarem a predykcją pomiaru :
( )1k|1kˆ ++x ( )k|1kˆ +x
( )1k +z
( )k|1kˆ +⋅ xH
( ) ( ) ( ) ( ) ( )( )k1kxH1k1kKk1kx1k1kx +⋅−+⋅+++=++ z
MiDwSS 2013 69
• Wzmocnienie Kalmana dobiera się tak aby estymacja kowariancji błędu aposteriori była jak najmniejsza
( ) ( ) ( ) ( ) ( )( )k1kxH1k1kKk1kx1k1kx +⋅−+⋅+++=++ z
( )1k +K
( )1k|1kP ++
( ) ( ) ( )[ ] 1TT
RHk1kPHHk1kP1kK−
+⋅+⋅⋅⋅+=+

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana
( )( )( ) RHk1kPH
Hk1kP1kK
T
T
+⋅+⋅
⋅+
=+
MiDwSS 2013 70
( )H
11kKlim
0R
=+→
( ) 01kKlim0)1|1k(P
=+→+
Większe zaufanie do pomiaru niżdo predykcji pomiaru
Większe zaufanie do predykcji pomiaru niż pomiaru

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Algorytm Filtru Kalmana
MiDwSS 2013 71

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 1: zastosowania Filtru Kalmana
Odszumianie (filtrowanie) próbkowanych sygnałów zebranych z systemu GPS (10 razy na sekundę) zamontowanego w pojeździe autonomicznym poruszającym się ruchem jednostajnie przyspieszonym (1 m/s2) po prostej drodze. Jakie jest położenie pojazdu?
Pomiar położenia odbywa się z dokładnością 10 m.
Prędkość mierzy się z dokładnością 0.2 m/s.
MiDwSS 2013 72

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 1: zastosowania Filtru Kalmana
Jak określić macierze R i Q ?
[ ]TkkER )()( µµ ⋅=
[ ]TkwkwEQ )()( ⋅=
10010)( 22===
sR σ
[ ]
=
⋅
=2
svsEvs
sEQ
MiDwSS 2013 73
[ ]TkwkwEQ )()( ⋅= [ ]
=
⋅
=
2vvs
svsEvs
v
sEQ
⋅⋅⋅
⋅⋅
⋅
=22
2
2
2
2
22
2
)(2
)(
2)(
2)(
TT
T
TTT
Q
vv
vv
σσ
σσ
1.0=T
2.0=vσ

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 1: zastosowania Filtru Kalmana
600
800
1000
1200
1400
Pozycja
[m
]
Pozycja pojazdu
prawdziwa
mierzona
estymowana
MiDwSS 2013 74
0 5 10 15 20 25 30 35 40 45 50-200
0
200
400
Czas [s]
Pozycja
[m
]

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 1: zastosowania Filtru Kalmana
10
20
30
40
Bla
d P
ozycji [
m]
Blad pomiaru pozycji i Blad estymacji pozycji
pomiaru
estymaty
MiDwSS 2013 75
0 5 10 15 20 25 30 35 40 45 50-30
-20
-10
0
Czas [s]
Bla
d P
ozycji [
m]

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 1: zastosowania Filtru Kalmana
30
40
50
60
Pre
dkosc [
m/s
]
Predkosc pojazdu
prawdziwa
estymowana
MiDwSS 2013 76
0 5 10 15 20 25 30 35 40 45 500
10
20
Czas [s]
Pre
dkosc [
m/s
]

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 1: zastosowania Filtru Kalmana
0.1
0.2
0.3
0.4
Bla
d p
redkosci [m
/s]
Blad estymacji predkosci
MiDwSS 2013 77
0 5 10 15 20 25 30 35 40 45 50-0.3
-0.2
-0.1
0
Czas [s]
Bla
d p
redkosci [m
/s]

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 2: zastosowania Filtru Kalmana
Odszumianie (filtrowanie) próbkowanych sygnałów zebranych z analogowego czwórnika RLC. Napięcie zasilania u
we(t) to napięcie o przebiegu bipolarnym
prostokątnym z przedziału 0-1 V, R=5 kΩ, L=2.5 H i C =0.1 µF. Napięcie na kondensatorze mierzone jest co T=10-4 sekundy.
MiDwSS 2013 78
Odchylenie standardowe szumu pomiarowego i procesu przyjęto na poziomie 0.2.
Zaczerpnięty z [1]

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 2: zastosowania Filtru Kalmana
( )
=
11
t2
1
Rdx
xdt
dx
( )dt
du
dt
dxx
c
==1
2t( ) ( )tux
c=t
1
MiDwSS 2013 79
( ) ( ) ( )
+−−= t
1tt
1
21
2u
LCx
L
Rx
LCdt
dx
dt
( )( )
( ) ( )tw
LC
tu
LCtx
tx
L
R
LCdt
dx
dt
dx
⋅
+⋅
+
⋅
−−=
1
1
1
1
1
10
2
1
2
1

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 2: zastosowania Filtru Kalmana do estymacji stanu
( )
( )( ) ( )twtu
tx
tx
dt
dx
dt
dx
⋅
⋅+⋅
⋅+
⋅
⋅−⋅−=
66
2
1
66
2
1
104
1
104
1
102104
10
( )AT⋅⋅Ι−=
−1
MiDwSS 2013 80
( ) BAeBAT
d⋅⋅Ι−=
−1AT
deA =
( ) ( ) ( ) ( )
+⋅
+⋅
−−=+ kwkukxkx
13.360
0187.0
13.360
0187.0
8013.013.360
0001.09813.01
( ) [ ] ( ) ( )11011 +⋅++⋅=+ kvkxkz

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 2: zastosowania Filtru Kalmana do estymacji stanu
MiDwSS 2013 81

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 2: zastosowania Filtru Kalmana do estymacji stanu
0 50 100 150 200 250 300-1
0
1
2X1(K) (CZERW) I JEGO POMIAR Z1(K) (NIEB)
k
2X1(K) (CZERW) I JEGO ESTYMATA X1E(K/K)(NIEB)
MiDwSS 2013 82
0 50 100 150 200 250 300-1
0
1
2
k
0 50 100 150 200 250 3000
0.1
0.2WSPÓŁCZYNNIK WZMOCNIENIA KA1(k)
k

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 2: zastosowania Filtru Kalmana do estymacji stanu
0 50 100 150 200 250 300-2000
0
2000X2(K) (CZERW) I JEGO POMIAR Z2(K) (NIEB)
k
2000X2(K) (CZERW) I JEGO ESTYMATA X2E(K/K)(NIEB)
MiDwSS 2013 83
0 50 100 150 200 250 300-2000
0
2000
k
0 50 100 150 200 250 300-100
-50
0
50WSPÓŁCZYNNIK WZMOCNIENIA KA2(k)
k

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 3: zastosowania Filtru Kalmana do estymacji parametrów
• Rozważamy model postaci:
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
+⋅Θ=
⋅+⋅Θ+⋅Θ=+
1
kvkxHkz
kwGkuBkxAkx
MiDwSS 2013 84
gdzie wektor parametrów jest nieznany.
• Wprowadzając nowy wektor zmiennych stanu:
przy czym
Θ
( )kΘ=Θ
( )( )( )
Θ=
k
kxky

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 3: zastosowania Filtru Kalmana do estymacji parametrów
• Otrzymuje się nieliniowy model w przestrzeni stanów:
( ) ( ) ( )( )( )
( ) ( )( ) ( )
+=
+=+
0
,1
kvkyhkz
kwkukyfky
MiDwSS 2013 85
• Rozwiązanie: Rozszerzony Filtr Kalmana (dalsza część wykładu)
przy czym:
( ) ( )( ) ( ) += kvkyhkz
( ) ( )( )( ) ( ) ( ) ( )
( )
,
Θ
⋅Θ+⋅Θ=
k
kuBkxAkukyf
( )( ) ( ) ( ) kxHkyh ⋅Θ=

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Rozszerzonego Filtru Kalmana
• Rozszerzony Filtr Kalmana przeznaczony jest dla obiektów opisanych modelem nieliniowym i/lub nieliniowym równaniem pomiarowym.
• Równania takiego nieliniowego systemu można zapisać jako:
MiDwSS 2013 86
• Rozszerzony Filtr Kalmana jest Filtrem Kalamana linearyzowanym wokół aktualnej średniej i kowariancji – każdej zmiennej stanu.
f(), h() – funkcje nieliniowe Inna notacja niż poprzednio

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Rozszerzonego Filtru Kalmana
• Macierze Jacobiego pochodnych cząstkowych funkcji f() względem x i w:
MiDwSS 2013 87
• Macierze Jacobiego pochodnych cząstkowych funkcji h() względem x i v:
Inna notacja niż poprzednio

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Algorytm Rozszerzonego Filtru Kalmana
MiDwSS 2013 88Inna notacja niż poprzednio

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
spadające ciałoNieliniowa dynamika obiektuNieliniowe równanie pomiarowe d
g
MiDwSS 2013 89
radar
x
r1
r2
Zaczerpnięto z [4]

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
• Model systemu (ciągły)
+
⋅
−=
2
1
2
12
2
1
w
w
x
x
gd
x
x
x
&
&
β1
3
12
1
=
=
=
x
xx
xx
&
MiDwSS 2013 90
• Model pomiaru (ciągły)
3
2
3
2
3
2
0 wxx&
( ) vrxrz +−+=2
21
2
1
β
3
2
20
2
1
x
xed
k
x
⋅
⋅⋅
=
−
ρ
ρ

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
2
3
4
5
Błą
d e
sty
ma
cji w
yso
ko
ści (ft) 2
3
4
5
Błą
d e
sty
ma
cji p
ręd
ko
ści (ft/s)
Rozszerzony Filtr Kalmana
200
400
600
(l
b/ft2
)
MiDwSS 2013 91
0 5 10 15-5
-4
-3
-2
-1
0
1
Błą
d e
sty
ma
cji w
yso
ko
ści (ft)
czas (s)
0 5 10 15-5
-4
-3
-2
-1
0
1
Błą
d e
sty
ma
cji p
ręd
ko
ści (ft/s)
czas (s)
0 5 10 15-600
-400
-200
0
Błą
d e
sty
ma
cji w
sp
. β (l
b/ft
czas (s)

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
0
2
4
6
8
10x 10
4
ele
vation (
ft)
Pomiar, Prawdziwa pozycja, Estymat
MiDwSS 2013 92
2 4 6 8 10 12 14 16
-2
czas (s)
2 4 6 8 10 12 14 16-4000
-3000
-2000
-1000
0
czas (s)
Pra
wdziw
a p
ozycja
- E
sty
mata

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
40
60
80
100
120
Błą
d e
sty
ma
cji w
yso
ko
ści (f
t)
40
60
80
100
120
Błą
d e
sty
ma
cji p
ręd
ko
ści (f
t/s)
Filtr Kalmana
4000
5000
6000
(l
b/ft2
)
MiDwSS 2013 93
0 5 10 15-100
-80
-60
-40
-20
0
20
Błą
d e
sty
ma
cji w
yso
ko
ści (f
t)
czas (s)
0 5 10 15-100
-80
-60
-40
-20
0
20
Błą
d e
sty
ma
cji p
ręd
ko
ści (f
t/s)
czas (s)
0 5 10 15
0
1000
2000
3000
Błą
d e
sty
ma
cji w
sp
. β (l
b/ft
czas (s)

BibliografiaBibliografia
Materiały wykładowe z przedmiotów (sem. I; studiów I stopnia) : „Modelowanie i Identyfikacja”
„Teoria Sterowania”
[1] Tomasz P.Zieliński, „Cyfrowe przetwarzanie sygnałów – od teorii do zastosowań”. WKŁ, 2007.
MiDwSS 2013
[2] Rudolph. E. Kalman, "A New Approach to Linear Filtering and Prediction Problems", Trasactions of the ASME: Journal of Basic Engineering, vol 82, Series D, pp. 35-45, 1960.
[3] Peter S. Maybeck, „Stochastic models, estimation and control“,Academic Press, 1979.
[4] Arthur Gelb, „Applied Optimal Estimation”. The M.I.T Press, 1974.
94

Zakończenie ;)Zakończenie ;)
Koniec części I
MiDwSS 2013
Dziękuję za uwagę !!!
95
Related Documents











