Podstawy metrologii. Podstawy metrologii. AGH Wydział Zarządzania

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Podstawy Podstawy metrologii.metrologii.
AGH Wydział Zarządzania
PomiarPomiar
Pomiar - zespół działań mających na celu wyznaczenie wartości pewnych wielkości. Natomiast wg innych autorów pomiarem nazywamy czynności, po których wykonaniu można stwierdzić, że w chwili pomiaru dokonywanego w określonych warunkach, przy wykorzystaniu określonych środków (narzędzi) i wykonaniu tych czynności wielkość mierzona X miała wartość: a < x< b. Stwierdzenie, że x znajduje się w przedziale od a do b nazywamy wynikiem pomiaru, przy czym b - a = 2 jest miarą dokładności pomiaru.

DiagnozaDiagnoza
Diagnoza - rozeznanie stanu rzeczy (zdarzenia lub obiektu) i jego tendencji rozwojowych na podstawie jego objawów (tzw. symptomów) oraz znajomości ogólnych prawidłowości, do celów planowanego działania.
Diagnostyka techniczna - metody i środki umożliwiające wydanie pełnej diagnozy, kwantyfikującej zamierzone działanie.
System diagnostyczny - zbiór metod i środków diagnostycznych niezbędnych do realizacji zadań diagnostyki.

Pomiary w rzeczywistych procesach prowadzone są przede wszystkim w celu:
- kontroli, czy wartości pomiarowe nie odbiegają zbytnio od wartości uznanych za prawidłowe (np. karty kontrolne)
- wyznaczania istotnych relacji (zależności) pomiędzy dwoma lub większą liczbą zmiennych (np. analiza korelacji i regresji)
Błędy pomiaroweBłędy pomiarowe
Błąd - miara niepewności wyniku pomiaru (w odróżnieniu od niezgodności oraz wady). Jest to rozbieżność między wynikiem pomiaru x a wartością prawdziwą lub poprawną w danej wielkości mierzonej. Rozróżnia się:błąd bezwzględny d = x - wbłąd względny g = d / w
Praktyczne aspekty teorii błędów obejmuje rachunek błędów, którego celem jest analiza i ocena niepewności pomiarowych.

NiepewnośćNiepewnośćParametr związany z wynikiem pomiaru
charakteryzujący rozrzut wyników pomiarów. Niepewność może wyrażać:
- niewiedzę, wątpliwość co do tego, która liczba ma być właściwym wynikiem,
- liczbową miarę możliwego rozrzutu wyników
Może być podawana w formie odchylenia standardowego, przedziału ufności przy danym poziomie ufności. Stanowi integralną część wyniku.
Reprezentacja wynikówReprezentacja wyników
Sposób prezentacji wyników pomiarów = najlepsze przybliżenie ± niepewność czyli
x = xnp ± dx Ostatnia cyfra znacząca wyniku
pomiaru powinna być tego samego rzędu co niepewność (np. jeśli wynik pomiaru wynosi 327,3 z niepewnością 5 to wynik należy zapisać 327 ± 5).
Błędy pomiaroweBłędy pomiarowe
Błąd przypadkowy – błąd który przy wielokrotnej realizacji w tych samych warunkach zmienia się w sposób losowy.
Błąd systematyczny to taki błąd, który w tych samych warunkach jest stały lub zmienia się wg. znanego prawa.

Błędy położeniaBłędy położenia
Błąd systematyczny (ang. bias) - różnica między zaobserwowaną wartością średnią z pomiarów a wartością prawdziwą (nominalną). Jest on miarą dokładności (ang. accuracy). Jeśli nie można wyznaczyć wartości prawdziwej, to zaleca się przyjęcie średniej z serii pomiarów wykonanych przyrządem o dokładności o klasę wyższej.

Błędy położeniaBłędy położenia
Stabilność (ang. stability, drift) - odnosi się do zmienności w czasie przy pomiarach jednego parametru tej samej części przez ten sam system pomiarowy.
Liniowość (ang. linearity) - miarą liniowości (a raczej nieliniowości) jest różnica pomiędzy wartościami błędu systematycznego w całym zakresie pomiarowym (od minimum do maksimum).
Błędy rozproszenia (rozrzutu) - Błędy rozproszenia (rozrzutu) - R&RR&R
Powtarzalność, wierność (ang. repeatability) - zmienność uzyskana przy pomiarach tym samym przyrządem pomiarowym, używanym przez tego samego pomiarowca, podczas pomiaru identycznego parametru (charakterystyki) tej samej części.
Odtwarzalność, niezmienność (ang. reproducibility) - zmienność wartości średniej uzyskana przy pomiarach przez różnych pomiarowców używających tego samego przyrządu pomiarowego podczas pomiarów identycznych parametrów (charakterystyk) tych samych części.
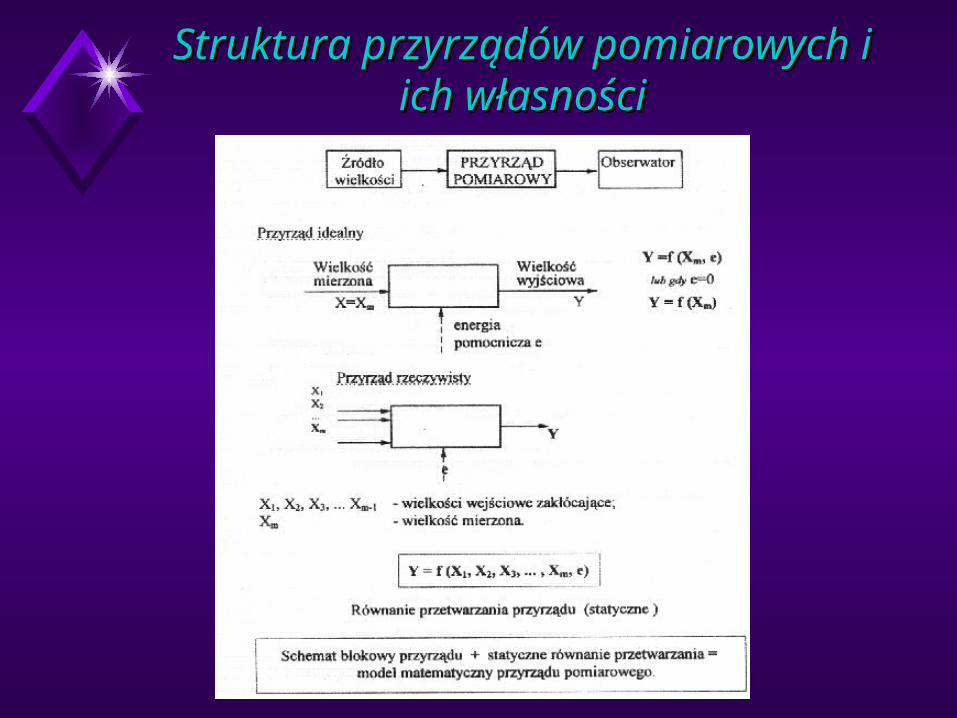
Struktura przyrządów Struktura przyrządów pomiarowych i ich własnościpomiarowych i ich własności
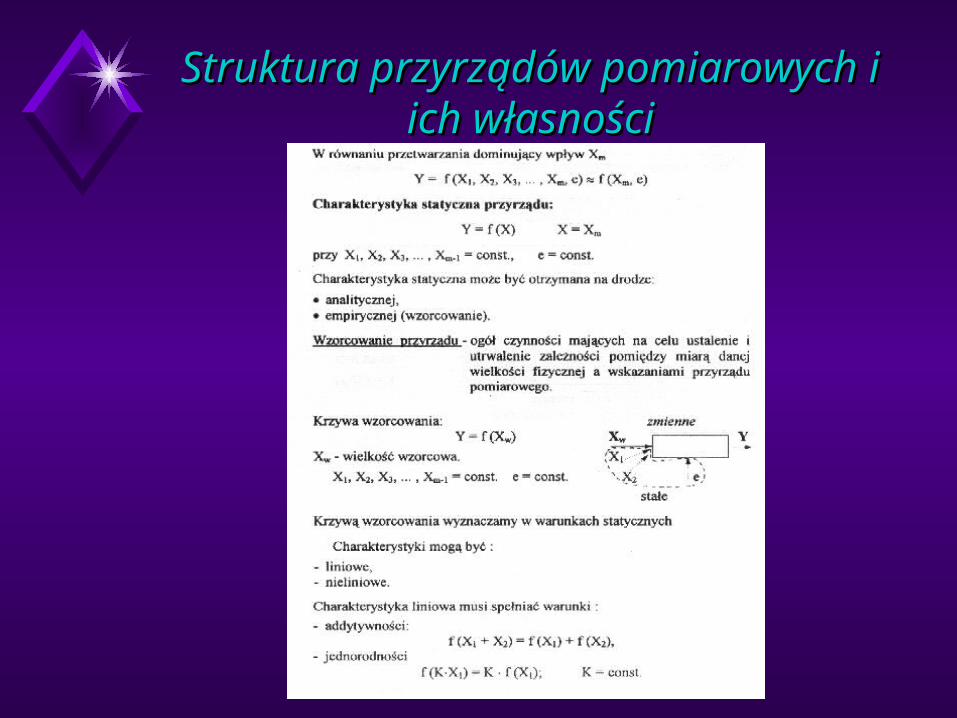
Struktura przyrządów Struktura przyrządów pomiarowych i ich własnościpomiarowych i ich własności


Własności dynamiczne przyrządówWłasności dynamiczne przyrządów
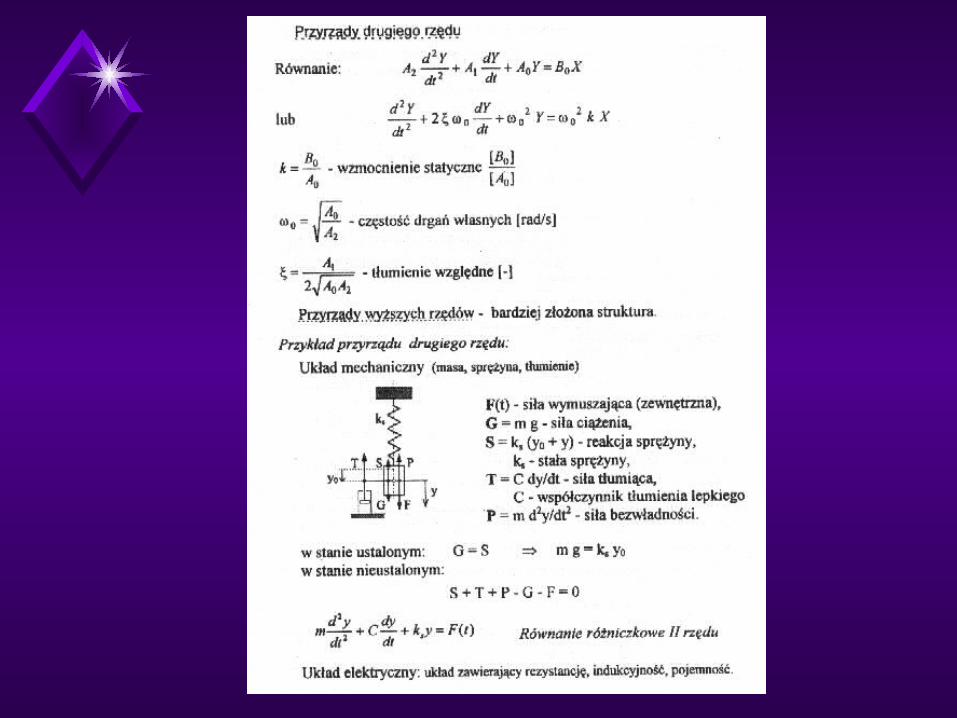
Do analizy i syntezy układów pomiarowych potrzebna jest znajomość modeli matematycznych przyrządów dynamicznych wchodzących w skład danych układów. Model matematyczny można otrzymać na drodze obróbki informacji zdobytej w trakcie doświadczeń na obiekcie. Model obiektu jest tym lepszy, im dokładniej odzwierciedla procesy zachodzące w obiekcie w sensie jakościowym i ilościowym. Model obiektu liniowego można opisać równaniem różniczkowym.
txbtd
txdb
td
txdbtya
td
tyda
td
tyda 01m
m
m01n
n
n



Transformata Laplace’aTransformata Laplace’a
gdzie f(t) jest funkcją rzeczywistą zmiennej rzeczywistej t, określonej dla każdej wartości t>0 i przedziałami ciągłą – będziemy ją nazywać oryginałem. Natomiast s=x+iy jest zmienną zespoloną. Funkcja F(s) jest funkcją zespoloną zmiennej zespolonej s – będziemy ją nazywać transformatą Laplace’a funkcji f(t).
)s(Fdte)t(f0
st

WWłasności transformaty łasności transformaty
Laplace’aLaplace’a
.2121 sFsFtftfL
,aa sFtfL
.000 1n12-n1-nnn ffsfssFstfL
Addytywność
Mnożenie przez stałą
Różniczkowanie względem czasu
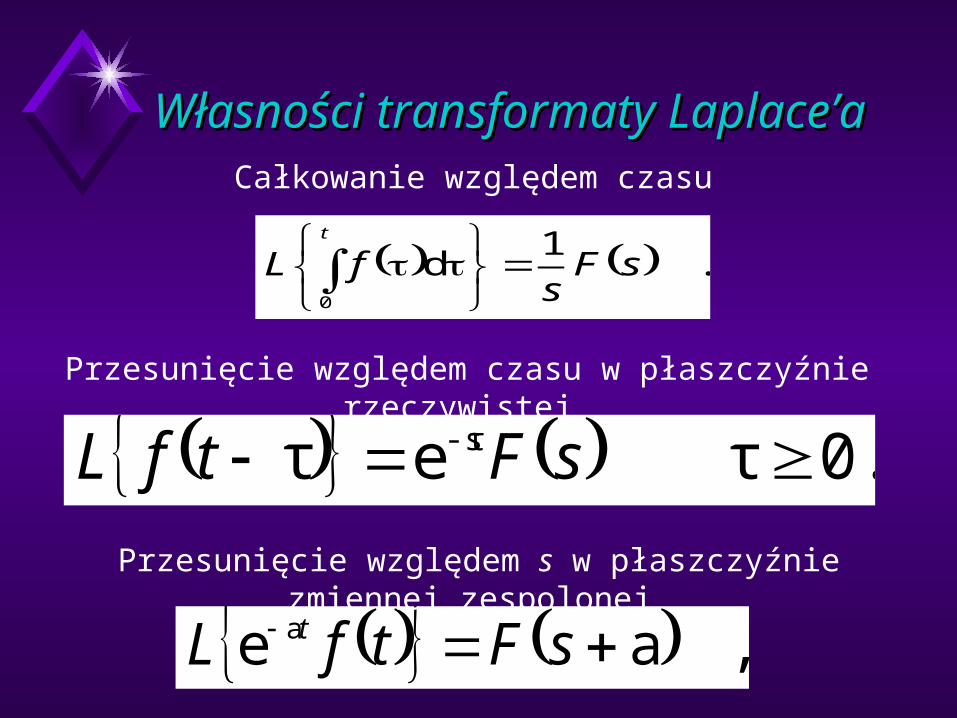
WWłasności transformaty łasności transformaty Laplace’aLaplace’a
.1
d0
sFs
fLt
0.τeτ -sτ sFtfL
,ae a sFtfL t
Całkowanie względem czasu
Przesunięcie względem czasu w płaszczyźnie rzeczywistej
Przesunięcie względem s w płaszczyźnie zmiennej zespolonej


TransmitancjaTransmitancja
Transmitancja operatorowa jest stosunkiem transformaty Laplace’a sygnału wyjściowego do transformaty Laplace’a sygnału wejściowego przy zerowych warunkach początkowych.
sXbsbsb
sYasasa
txL
tyL
sX
sYsG
01m
m
01n
n

Badanie własności Badanie własności przyrządówprzyrządów
Funkcja skoku jednostkowego
0tdla0
0tdla1t1tu
df
Transmitancja skoku jednostkowego wynosi:
s
11(t)L

Przyrząd proporcjonalnyPrzyrząd proporcjonalny
txty k
ksG
tty 1k

PrzyrządPrzyrząd inercyjny I rzędu inercyjny I rzędu
tuktytyT
1sT
ksG
T
t
e1kty
Opis obiektu

Odpowiedź skokowaOdpowiedź skokowa

Przyrząd różniczkującyPrzyrząd różniczkujący
t
txty
d
d
ssG
tty

Przyrząd całkujący Przyrząd całkujący (idealny)(idealny)
txty iT
s
1sG
iT
iT
tty
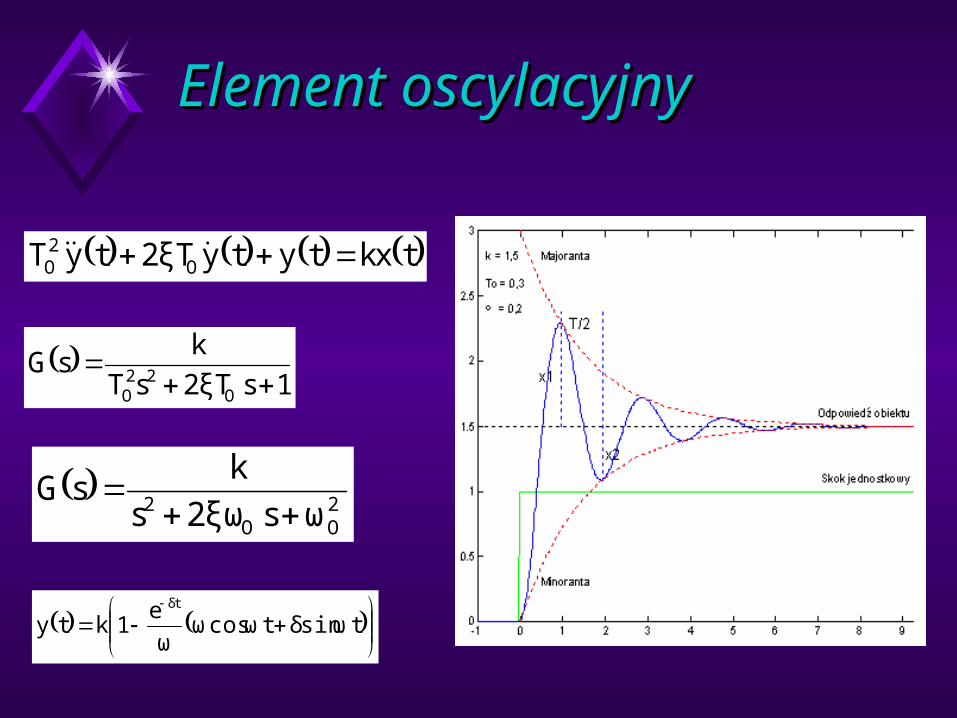
Element oscylacyjnyElement oscylacyjny
txtyty2ty kξTT O2O
1s2s
sG2
O
2O ξTT
k
2OO ωξω
k
s2ssG
2
tωδtωωω
tytδ
sincose
1k
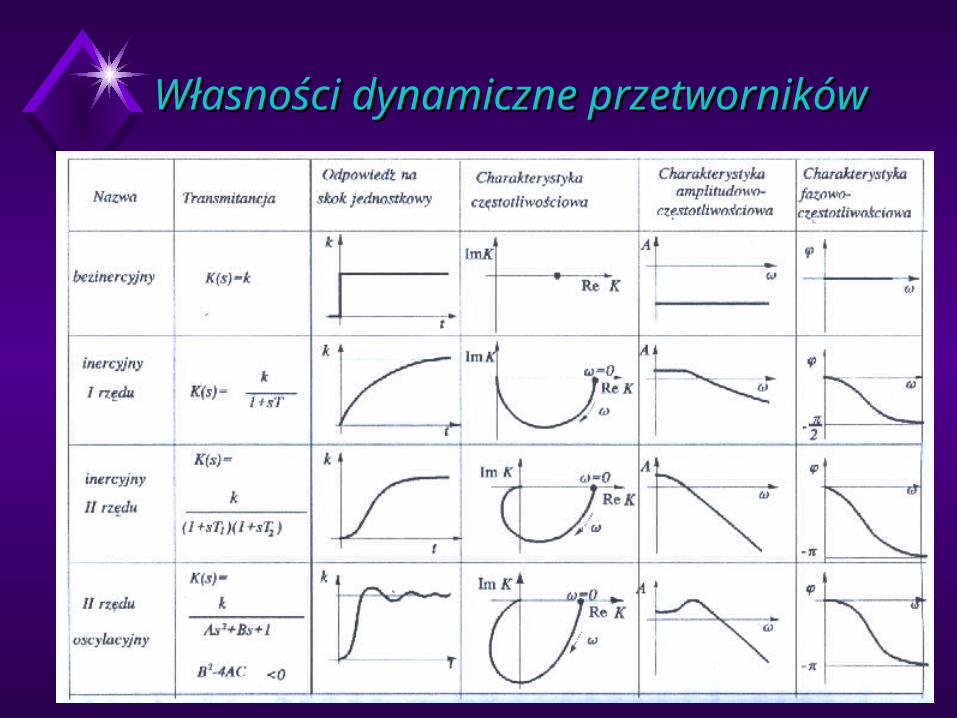
Własności dynamiczne Własności dynamiczne przetwornikówprzetworników

Własności dynamiczne Własności dynamiczne przetwornikówprzetworników
Related Documents











