s K K s C I P ) ( PI Controller Design 0 0 P I K K 0 ), / log( 20 ), log( 20 ) ( as KI as K j K K j C P I P 0 , 90 , 0 ) ( tan ) ( 1 as as K K j C P I Use PI only when you have to increase system type, i.e., when you have to make a nonzero ess to zero!

PI Controller Design
Jan 30, 2016
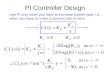
PI Controller Design. Use PI only when you have to increase system type, i.e., when you have to make a nonzero ess to zero!. KI/KP=1/2. KI/KP=1/5. KI/KP=1/10. Want these: DC gain boosting. KI/KP=1/20. w gcd. KI/KP=1/40. -5.7. -1.4. -2.8. -11.3. -26. 6. Don’t want these: - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

s
KKsC IP )(
PI Controller Design
00 PI KK
0),/log(20
),log(20)(
asKI
asK
j
KKjC PIP
0,90
,0)(tan)( 1
as
as
K
KjC
P
I
Use PI only when you have to increase system type, i.e., when you have to make a nonzero ess to zero!

0
20
40
60M
agn
itu
de
(dB
)
10-3
10-2
10-1
100
101
-90
-60
-30
0
Ph
ase
(deg
)Bode Diagram
Frequency (rad/sec)
gcd
Kill PM significantly
KI/KP=1/2
KI/KP=1/40
KI/KP=1/5KI/KP=1/10
KI/KP=1/20
-11.3
-26. 6
-5.7-2.8-1.4
Don’t want these:PM reduction!
Want these:DC gain boosting

Basic PI Design Steps• From plant, draw Bode plot
• From specs => PMd and gcd
– If there is speed or BW req, gcd, • In this case, if PM not enough, design PD or lead
– Otherwise, choose gcd to have PM>PMd
• Find K to enforce gcd:
• Let KP = K
• And KI = Kgcd/10~20, depending on extra PM room to spare
1gcd )(
jCGK
Need to increase type to make a nonzero ess to be zero. But no requirement on ess after type increase.

56
500)(
2
sssG
Want Mp <= 16%Steady state error = 0 when input is constant.
Analysis: steady state error = 0 when input is constant means that ess to step must be 0; or the system type must be 1 or higher.
Original system is type 0, so need PI control to increase the system type to 1.
Example

%PI control examplen=[500]; d=[1 6 5];figure(1); clf; margin(n,d); hold on; grid; V=axis;Mp = 16; PMd = 70 - Mp +10; %put in a large extra PM, because PI kills PMsemilogx(V(1:2),[PMd-180 PMd-180],':r');%draw PMd linex=ginput(1); w_gcd = x(1); %get desired w_gcKP = 1/abs(polyval(n,j*w_gcd)/polyval(d,j*w_gcd));z = w_gcd/10; KI = z*KP;ngc = conv(n, [KP KI]); dgc = conv(d, [1 0]);figure(1); margin(ngc,dgc); grid; [ncl,dcl]=feedback(ngc,dgc,1,1);figure(2);step(ncl,dcl); grid;figure(3); margin(ncl*1.414,dcl); grid;

-20
0
20
40M
agn
itu
de
(dB
)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Ph
ase
(deg
)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 15.4 deg (at 22.1 rad/sec)
Frequency (rad/sec)

-60
-40
-20
0
20
40
60M
agn
itu
de
(dB
)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Ph
ase
(deg
)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 58.6 deg (at 4.1 rad/sec)
Frequency (rad/sec)

0 2 4 6 8 10 12 140
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ud
e
Ess is 0
Can afford more overshoot!

Sluggish settling is typical of PI or lag controlled systems.
Can reduce it by moving the p/z of controller to higher frequency.

-40
-20
0
Mag
nit
ud
e (d
B)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Ph
ase
(deg
)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 74.8 deg (at 6.13 rad/sec)
Frequency (rad/sec)

%PI control examplen=[500]; d=[1 6 5];figure(1); clf; margin(n,d); hold on; grid; V=axis;Mp = 16; PMd = 70 - Mp +10; %put in a large extra PM, because PI kills PMsemilogx(V(1:2),[PMd-180 PMd-180],':r');%draw PMd linex=ginput(1); w_gcd = x(1); %get desired w_gcKP = 1/abs(polyval(n,j*w_gcd)/polyval(d,j*w_gcd));z = w_gcd/5; KI = z*KP;ngc = conv(n, [KP KI]); dgc = conv(d, [1 0]);figure(1); margin(ngc,dgc); grid; [ncl,dcl]=feedback(ngc,dgc,1,1);figure(2);step(ncl,dcl); grid;figure(3); margin(ncl*1.414,dcl); grid;

-100
-50
0
50
100M
agn
itu
de
(dB
)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Ph
ase
(deg
)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 52.8 deg (at 4.14 rad/sec)
Frequency (rad/sec)

0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ud
e

PI Design with ess specs• From plant, draw Bode plot
• From specs => Kv,a-des, PMd and gcd
– For required ess, Kv,a-des =1/ess
– With C(s)=1/s, compute Kv,a-have
– If there is speed or BW req, gcd, • In this case, if PM not enough, design PD or lead
– Otherwise, choose gcd to have PM>PMd
• Find K to enforce gcd:
• Let KP = K, KIdes= Kv,a-des/Kv,a-have
– If KIdes <= Kgcd/5~20, done, let KI = KIdes
– Else, increase gcd and go back to previous step
1gcd )(
jCGK
Need to increase type by 1 to make a nonzero ess to be zero, and after type increase, there is further requirement on ess.

56
500)(
2
sssG
Want Mp <= 16%Steady state error <= 0.1 for ramp input.
Analysis: steady state error <= 0.1 for ramp implies that the system type must be 1 or higher.
Original system is type 0, so need PI control.
Ess to ramp <= 0.1 requires Kvd >= 10.
Previous design leaves Kv = KI*500/5 = 100KI = 4.44
Example
KI=0.0444

0 500 1000 15000
500
1000
1500Step Response
Time (sec)
Am
plit
ud
e

499.8 500 500.2 500.4 500.6
499.5
500
500.5
Step Response
Time (sec)
Am
plit
ud
e
ess>0.1

In the previous design, KI=0.0444 is already at the maximum of the range Kgcd/5~20,
But KIdes = 0.1, which is a factor of 10/4.22 larger.
So need to increase KP.
Hence, try letting KI = KIdes = 0.1, and make KP larger by 10/4.22.

KP = KP*0.1/KI; KI =0.1;
ngc = conv(n, [KP KI]); dgc = conv(d, [1 0]);figure(1); margin(ngc,dgc); grid;[ncl,dcl]=feedback(ngc,dgc,1,1);figure(2);step(ncl,dcl); grid;figure(3); step(ncl,[dcl 0]); grid;
Ramp response
Old KI, new KI

0 500 1000 15000
500
1000
1500 Step Response
Time (sec)
Am
plit
ud
e

499.85 499.9 499.95 500 500.05 500.1 500.15 500.2
499.7
499.8
499.9
500
500.1
500.2
Step Response
Time (sec)
Am
plit
ud
e
ess = 0.1

0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ud
e
Can play with KP, but difficult to achieve the best KP

PI Design with PD Design Steps• From required ess, Kv,a-des =1/ess
• With C(s)=1/s, compute Kv,a-have
• Let KI = Kv,a-des/Kv,a-have
• Multiply G(s) by KI/s
• Do a PD design for KIG(s)/s, with DC gain=1:– Find gc and PM
– Find PMd
– Let = PMd – PM + (a few degrees)
– Compute TD = tan()/wgcd
• KP = KI*TD

%Alternative PI control by PD designclear all; n=[0 0 500]; d=[1 6 5];ess2ramp = 0.1; Kvd = 1/ess2ramp;Kva = n(end)/d(end); %after introducing 1/sKI = Kvd/Kva;%multiplying G(s) by KI/s and get new Bodeni=KI*n; di=[d 0];figure(1); clf; margin(ni,di); hold on; grid;[GM,PM,wpc,wgc]=margin(ni,di);PMd=50+10; phi = (PMd-PM)*pi/180;Td = tan(phi)/wgc; KP=KI*Td;ngc = conv(n, [KP KI]); dgc=di;figure(1); margin(n,d); margin(ngc,dgc);[ncl,dcl]=feedback(ngc,dgc,1,1);figure(3);step(ncl,dcl); grid;

-100
-50
0
50
100M
agn
itu
de
(dB
)
10-2
10-1
100
101
102
-270
-180
-90
0
Ph
ase
(deg
)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 38.8 deg (at 6.2 rad/sec)
Frequency (rad/sec)

0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ud
e

clear all; n=[0 0 500]; d=[1 6 5];ess2ramp = 0.1; Kvd = 1/ess2ramp;Kva = n(end)/d(end); %after introducing 1/sKI = Kvd/Kva;%multiplying G(s) by KI/s and get new Bodeni=KI*n; di=[d 0];figure(1); clf; margin(ni,di); hold on; grid;[GM,PM,wpc,wgc]=margin(ni,di);PMd=50+3; phi = (PMd-PM)*pi/180;Td = tan(phi)/wgc; KP=KI*Td;ngc = conv(n, [KP KI]); dgc=di;figure(1); margin(n,d); margin(ngc,dgc);[ncl,dcl]=feedback(ngc,dgc,1,1);figure(3);step(ncl,dcl); grid;

-100
-50
0
50
100M
agn
itu
de
(dB
)
10-2
10-1
100
101
102
-270
-180
-90
0
Ph
ase
(deg
)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 40.2 deg (at 5.04 rad/sec)
Frequency (rad/sec)

0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ud
e

Alternative PI Design Steps• For required ess, Kv,a-des =1/ess
• With C(s)=1/s, compute Kv,a-have
• Let KI = Kv,a-des/Kv,a-have
• Rewrite char eq: (KP + KI/s)G(s) + 1=0• KP*n/d + KI*n/d/s +1 = 0• KP *n*s + KI*n+d*s =0, KP*n*s/(KI*n+d*s) + 1 =0• So do a KP design for n*s/(KI*n+d*s), with KI above
– Draw Bode plot for n*s/(KI*n+d*s)– Select max PM frequency– Compute KP to make that frequency wgc

%Alternative PI control exampleclear all; n=[0 0 500]; d=[1 6 5]; %note same lengthess2ramp = 0.1; Kvd = 1/ess2ramp;Kva = n(end)/d(end); %after introducing 1/sKI = Kvd/Kva;%get TF after closing the G(s) and KI/s loopni=[n 0]; di=[d 0]+KI*[0 n];figure(1); clf; margin(ni,di); grid;x=ginput(1); w_gcd = x(1); %get desired w_gcKP = 1/abs(polyval(ni,j*w_gcd)/polyval(di,j*w_gcd));ngc = conv(n, [KP KI]); dgc = conv(d, [1 0]);figure(2); margin(n,d); hold on; margin(ngc,dgc);[ncl,dcl]=feedback(ngc,dgc,1,1);figure(3);step(ncl,dcl); grid;

-40
-20
0
20
40
60M
agn
itu
de
(dB
)
10-1
100
101
102
-315
-270
-225
-180
-135
-90
Ph
ase
(deg
)
Bode DiagramGm = -43.5 dB (at 2.89 rad/sec) , Pm = 15.1 deg (at 22.1 rad/sec)
Frequency (rad/sec)
Pick wgc here

-100
-50
0
50
100M
agn
itu
de
(dB
)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Ph
ase
(deg
)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 29.5 deg (at 3.43 rad/sec)
Frequency (rad/sec)

0 1 2 3 4 50
0.5
1
1.5Step Response
Time (sec)
Am
plit
ud
e

-40
-20
0
20
40
60M
agn
itu
de
(dB
)
10-1
100
101
102
-315
-270
-225
-180
-135
-90
Ph
ase
(deg
)
Bode DiagramGm = -43.5 dB (at 2.89 rad/sec) , Pm = 15.1 deg (at 22.1 rad/sec)
Frequency (rad/sec)
Pick wgc here

-100
-50
0
50
100M
agn
itu
de
(dB
)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Ph
ase
(deg
)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 36.2 deg (at 3.89 rad/sec)
Frequency (rad/sec)

0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ud
e

-40
-20
0
20
40
60M
agn
itu
de
(dB
)
10-1
100
101
102
-315
-270
-225
-180
-135
-90
Ph
ase
(deg
)
Bode DiagramGm = -43.5 dB (at 2.89 rad/sec) , Pm = 15.1 deg (at 22.1 rad/sec)
Frequency (rad/sec)
Pick wgc here

0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
1.4 Step Response
Time (sec)
Am
plit
ud
e

We conclude that it is impossible to meet the specifications with a PI controller.
But we can fix the excessive overshoot with a lead.

56
500)(
2
sssG
Want Mp <= 16%Steady state error <= 0.1 for ramp input.
Overall design:1.Ess2ramp <=0.1, PI with KI=1/0.1*5/500=0.12.Close the I-loop and select KP for best PM shape, KP = 0.0843.Use a lead controller with DC gain = 1 to reduce Mp from 30% to <= 16%

clear all; n=[0 0 500]; d=[1 6 5];ess2ramp = 0.1; Kvd = 1/ess2ramp;Kva = n(end)/d(end); %after introducing 1/sKI = Kvd/Kva;%get TF after closing the G(s) and KI/s loopni=[n 0]; di=[d 0]+KI*[0 n];figure(1); clf; margin(ni,di); grid;x=ginput(1); w_gcd = x(1); %get desired w_gcKP = 1/abs(polyval(ni,j*w_gcd)/polyval(di,j*w_gcd));ngc = conv(n, [KP KI]); dgc = conv(d, [1 0]);figure(2); margin(n,d); hold on; margin(ngc,dgc);[ncl,dcl]=feedback(ngc,dgc,1,1);figure(3);step(ncl,dcl); grid;

%follow with a lead controller with DC gain =1 %to make Mp=30% ==> Mp<=16%[GM,PM,wpc,wgc]=margin(ngc,dgc);w_gcd=wgc; PMd=50+10; phimax = (PMd-PM)*pi/180;alpha=(1+sin(phimax))/(1-sin(phimax));zlead=w_gcd/alpha^.25; plead=w_gcd*alpha^.75;ngcc = conv(ngc, alpha*[1 zlead]);dgcc = conv(dgc, [1 plead]);figure(2); margin(ngcc,dgcc); grid;[ncl,dcl]=feedback(ngcc,dgcc,1,1);figure(5);step(ncl,dcl); grid;figure(6);step(ncl,[dcl 0]); grid; %ramp response

-100
-50
0
50
100M
agn
itu
de
(dB
)
10-2
10-1
100
101
102
103
-180
-135
-90
-45
0
Ph
ase
(deg
)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 53.9 deg (at 7.1 rad/sec)
Frequency (rad/sec)
Original system
After PI alone
With PI and lead

0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ud
e
Mp <= 16% is met.

0 500 1000 15000
500
1000
1500Step Response
Time (sec)
Am
plit
ud
e

499.6 499.7 499.8 499.9 500 500.1 500.2 500.3499.5
499.6
499.7
499.8
499.9
500
500.1
500.2
500.3Step Response
Time (sec)
Am
plit
ud
e Ess=0.1
y=t
Related Documents